The Effect of Aggressive Driving on Vehicle Parameters



Abstract
1. Introduction
- The individual manner of driving, differing among individuals;
- A regular way of driving, reflecting regular behavior while driving;
- A reflection of conscious choices made by a driver.
2. Materials and Methods
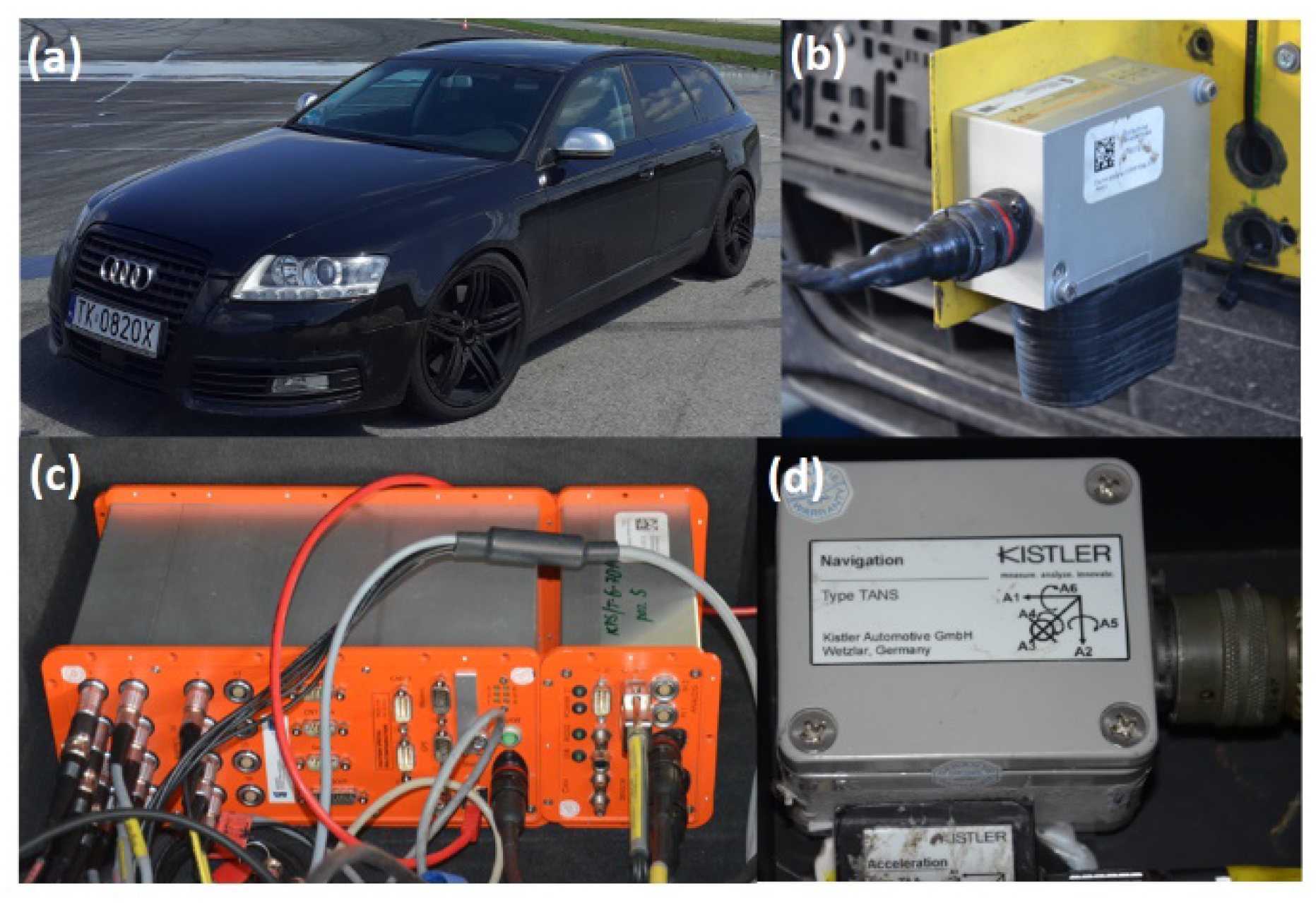
2.1. Data Collection
- An S-350 Aqua Datron® optoelectronic sensor for measuring longitudinal speed (Figure 1b);
- A uEEP-12 Datron® Data Acquisition Station (Figure 1c) with ARMS® data acquisition and analysis software; and
- A three-axis linear acceleration sensor (TAA Datron® and Navigation Sensor Modules), combining a solid-state, three-axis gyro with a three-axis linear accelerometer TANS Datron® for measuring longitudinal and lateral accelerations (Figure 1d).
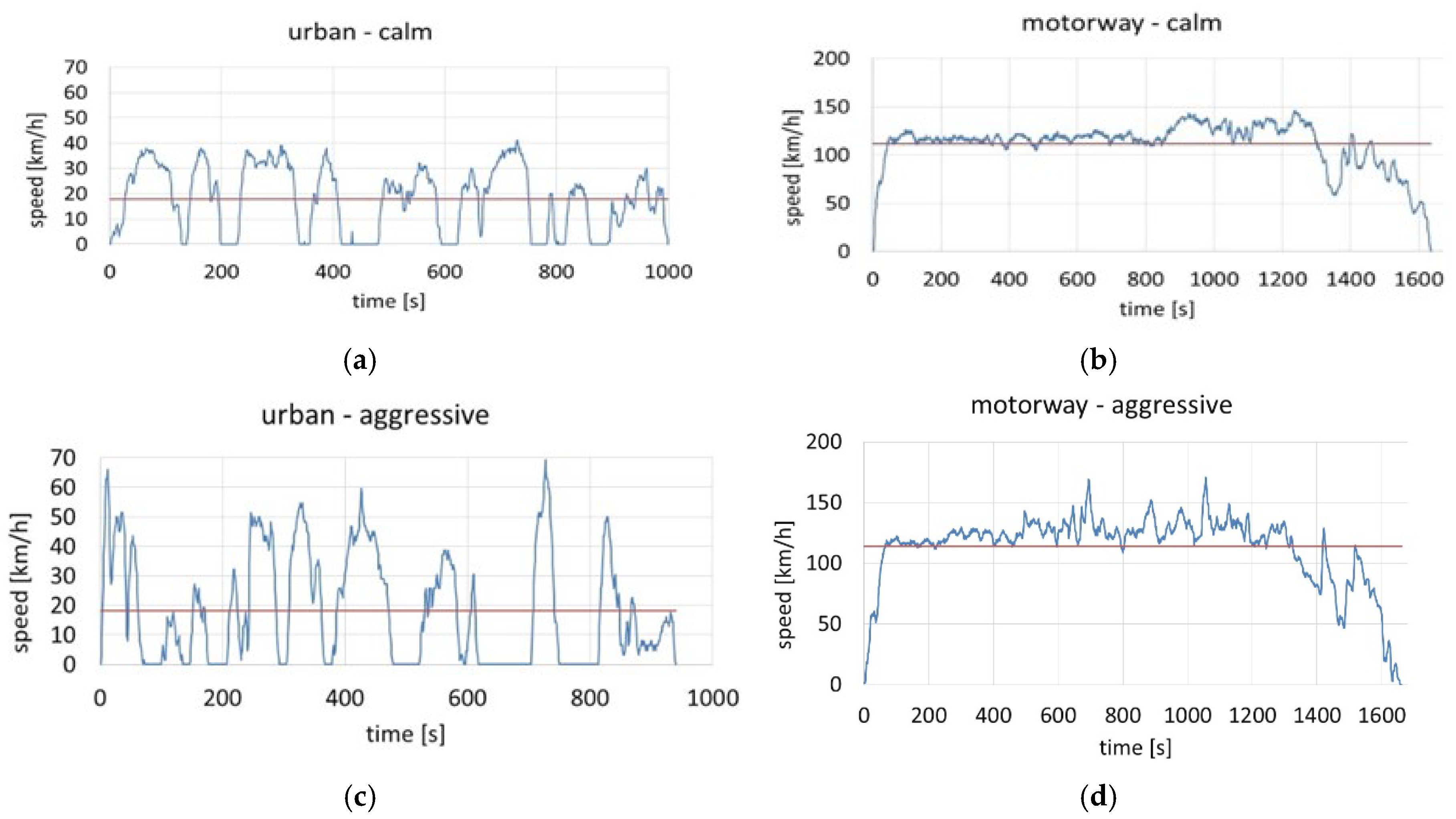
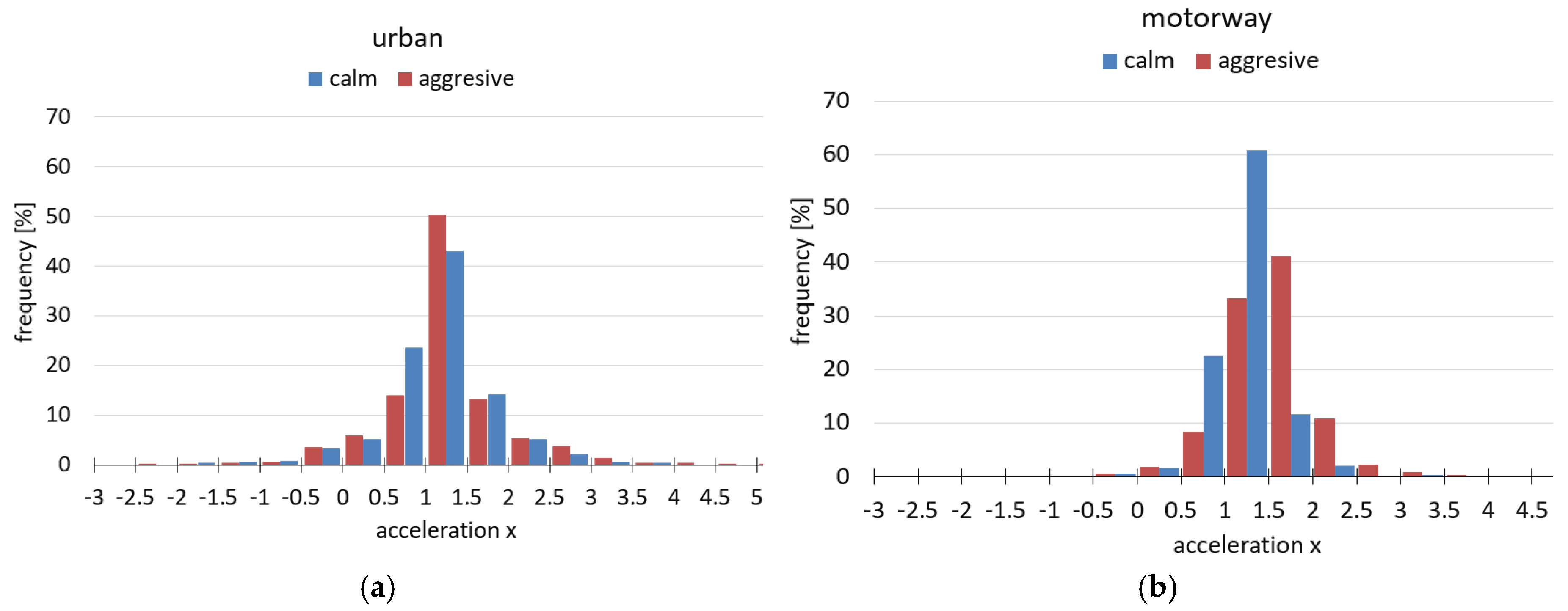
2.2. Test Cycles
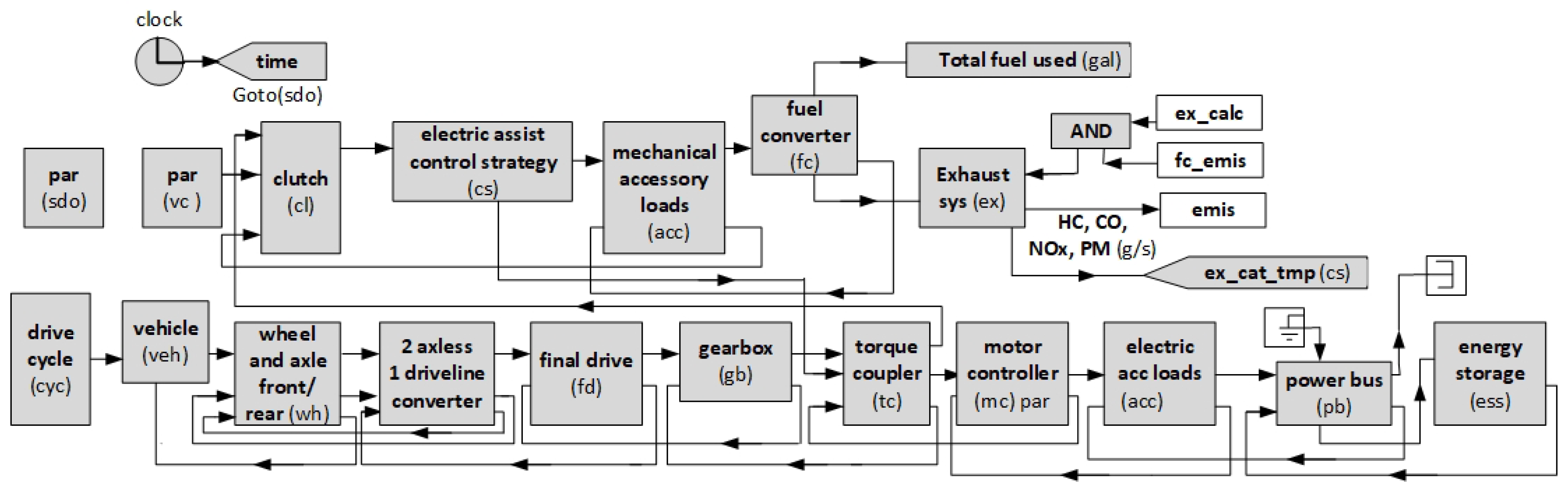
2.3. Simulation Test
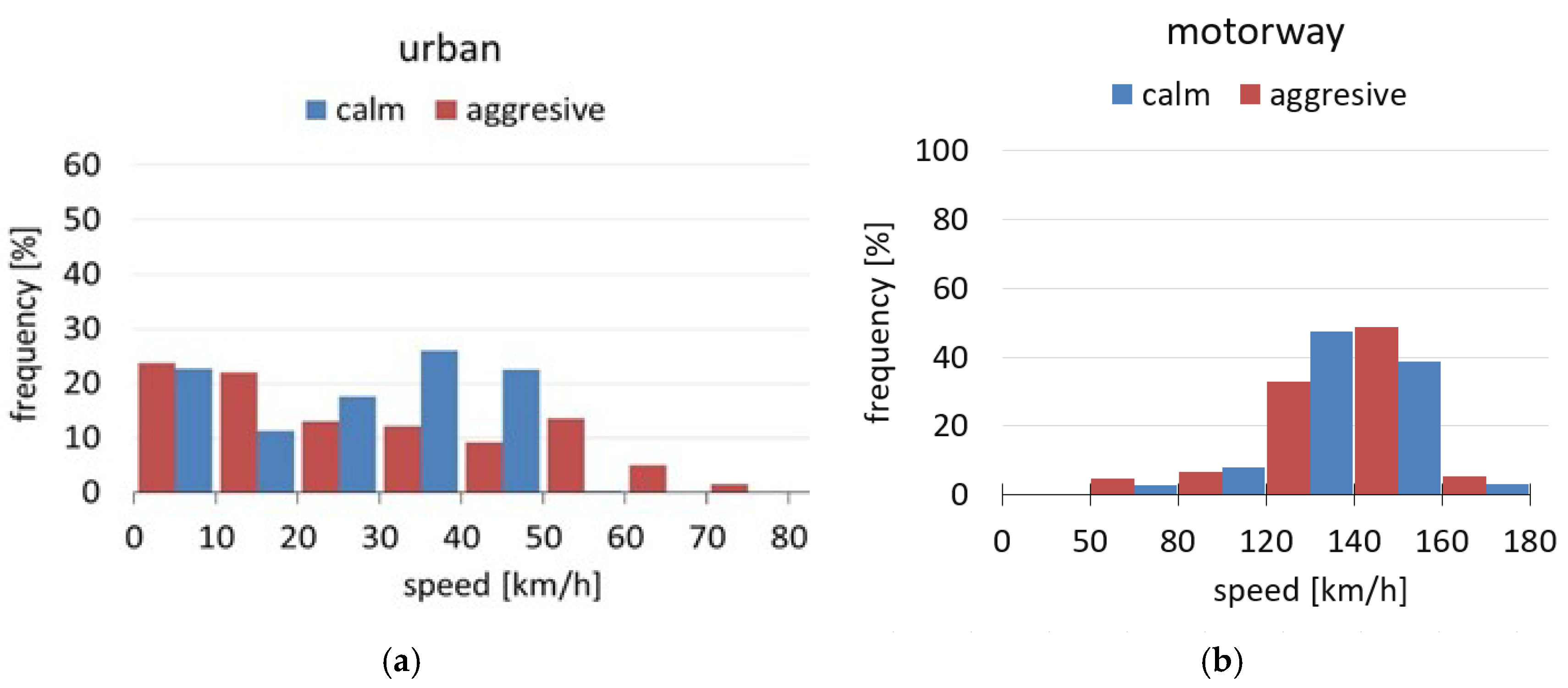
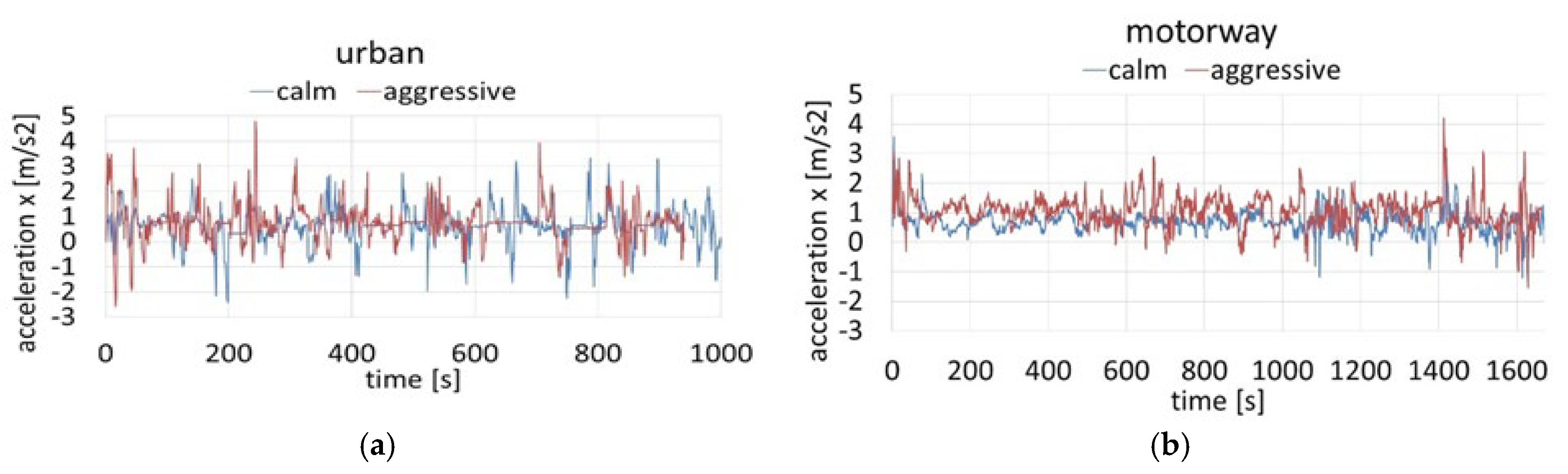
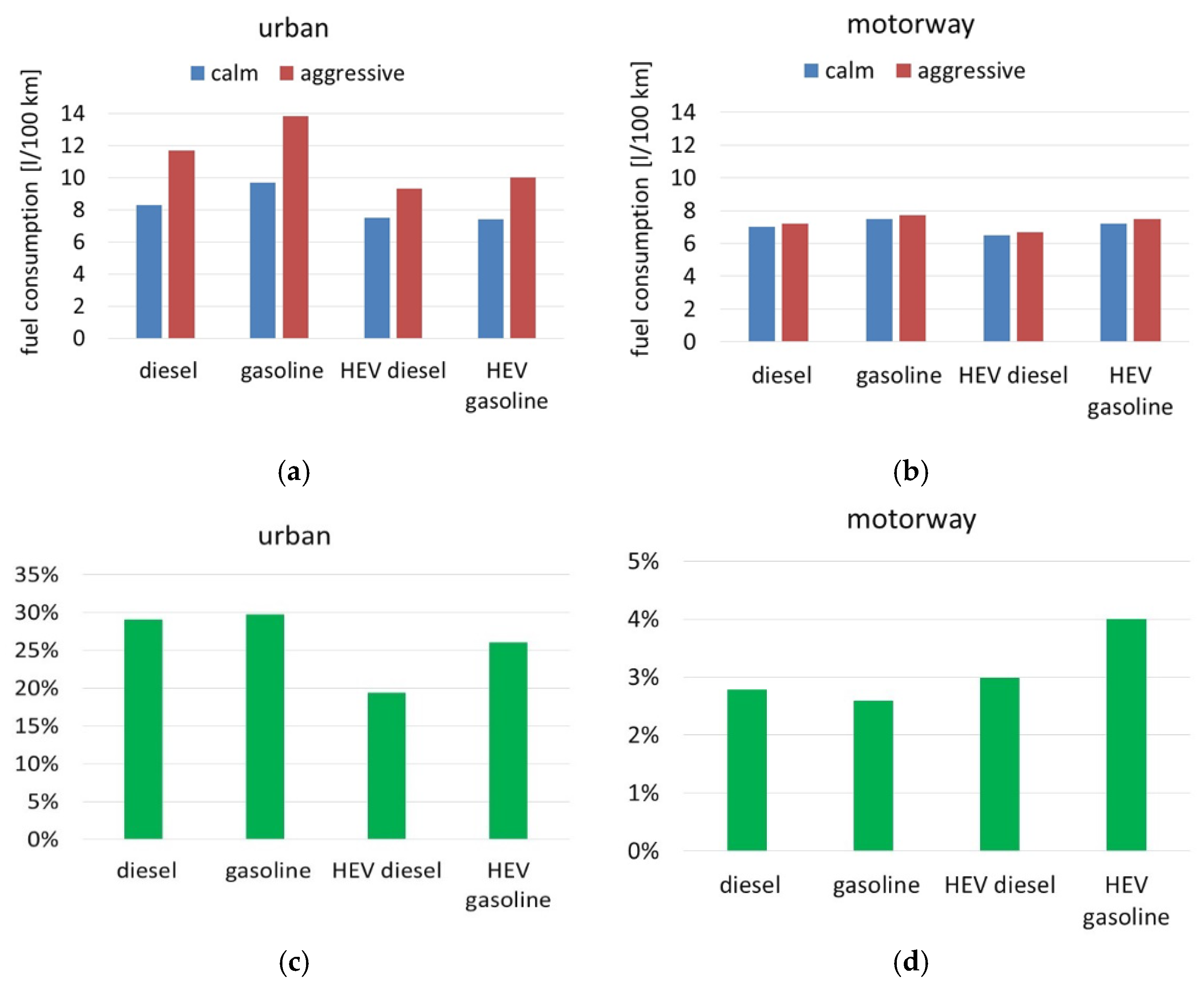
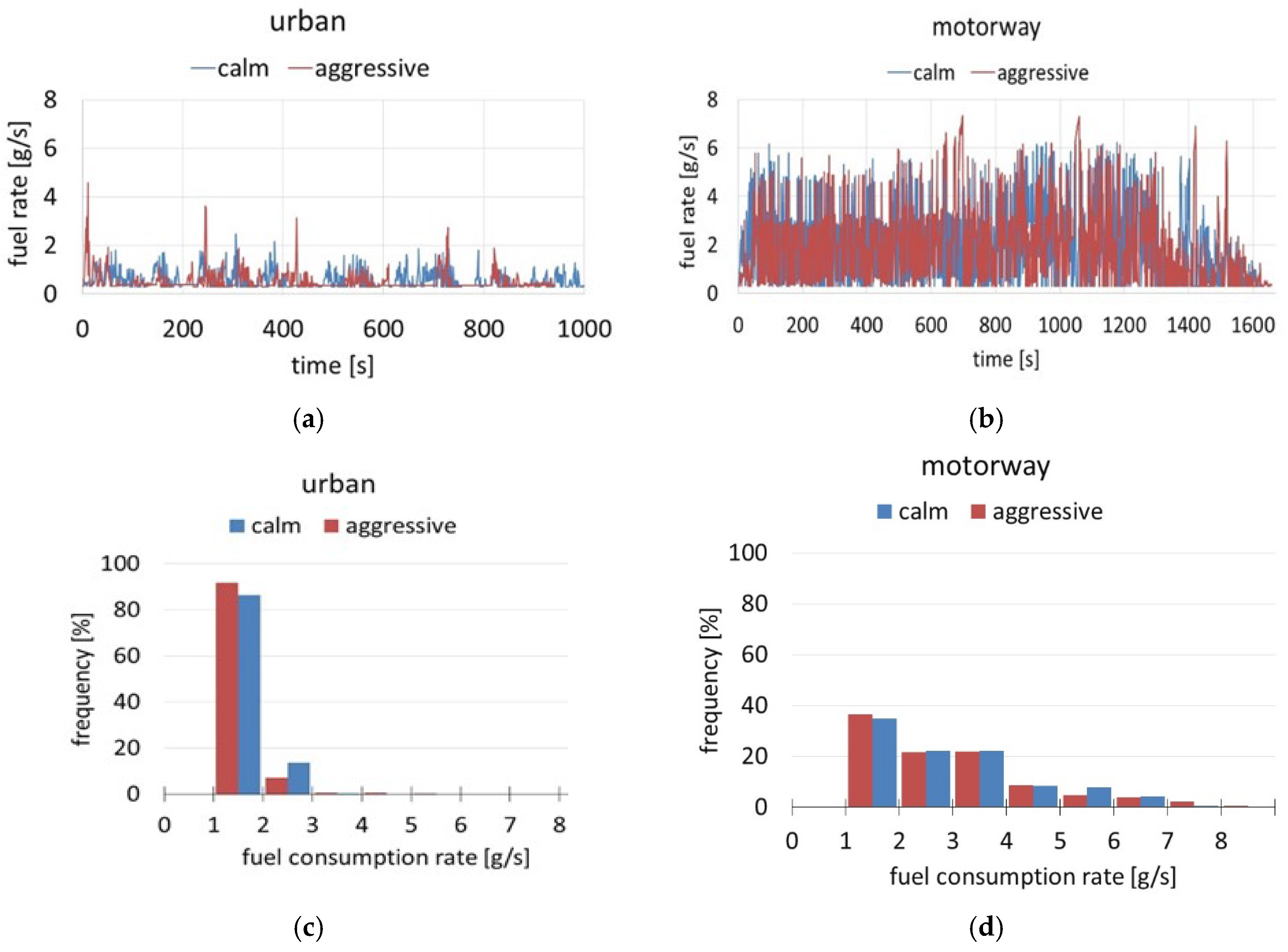
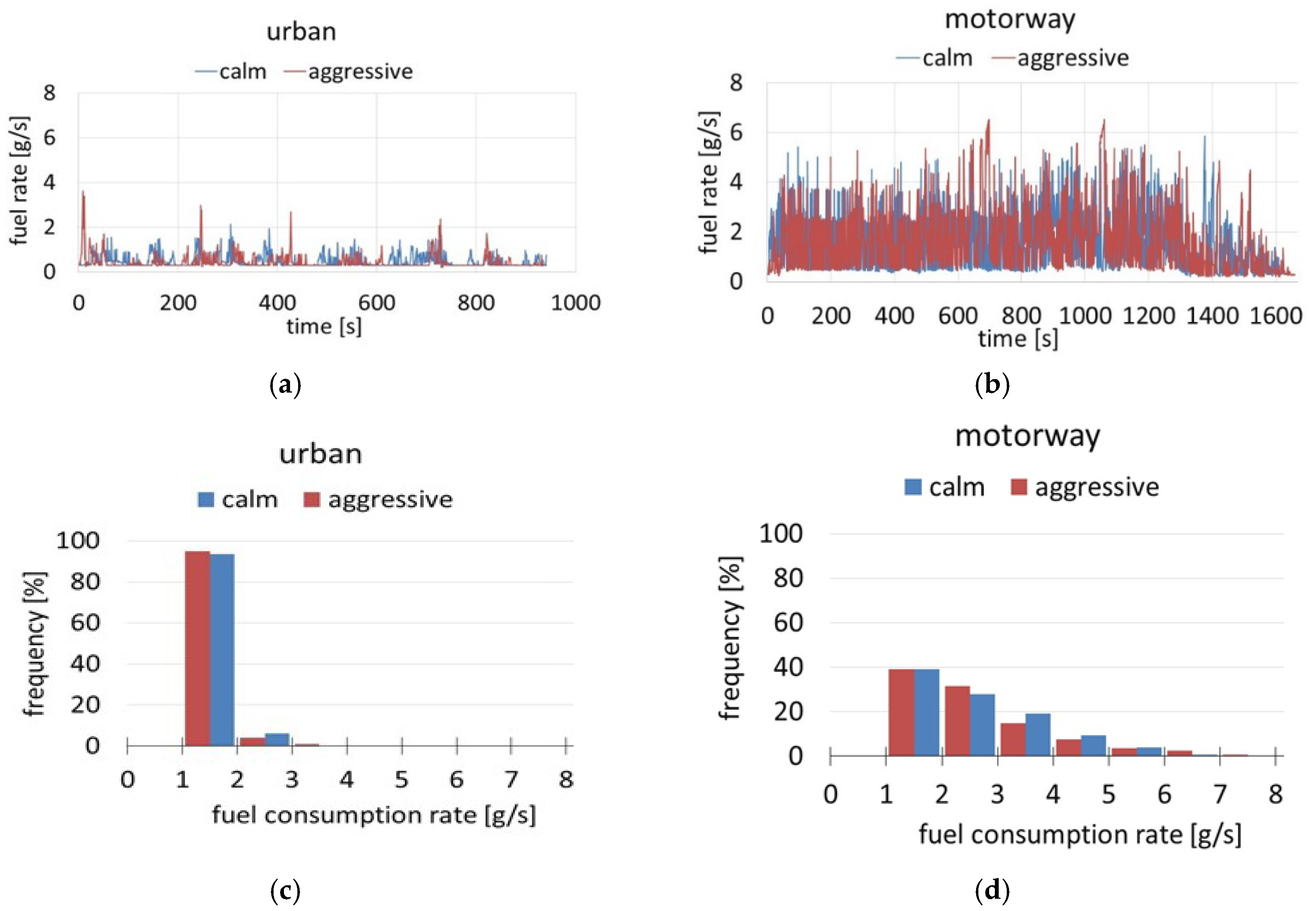
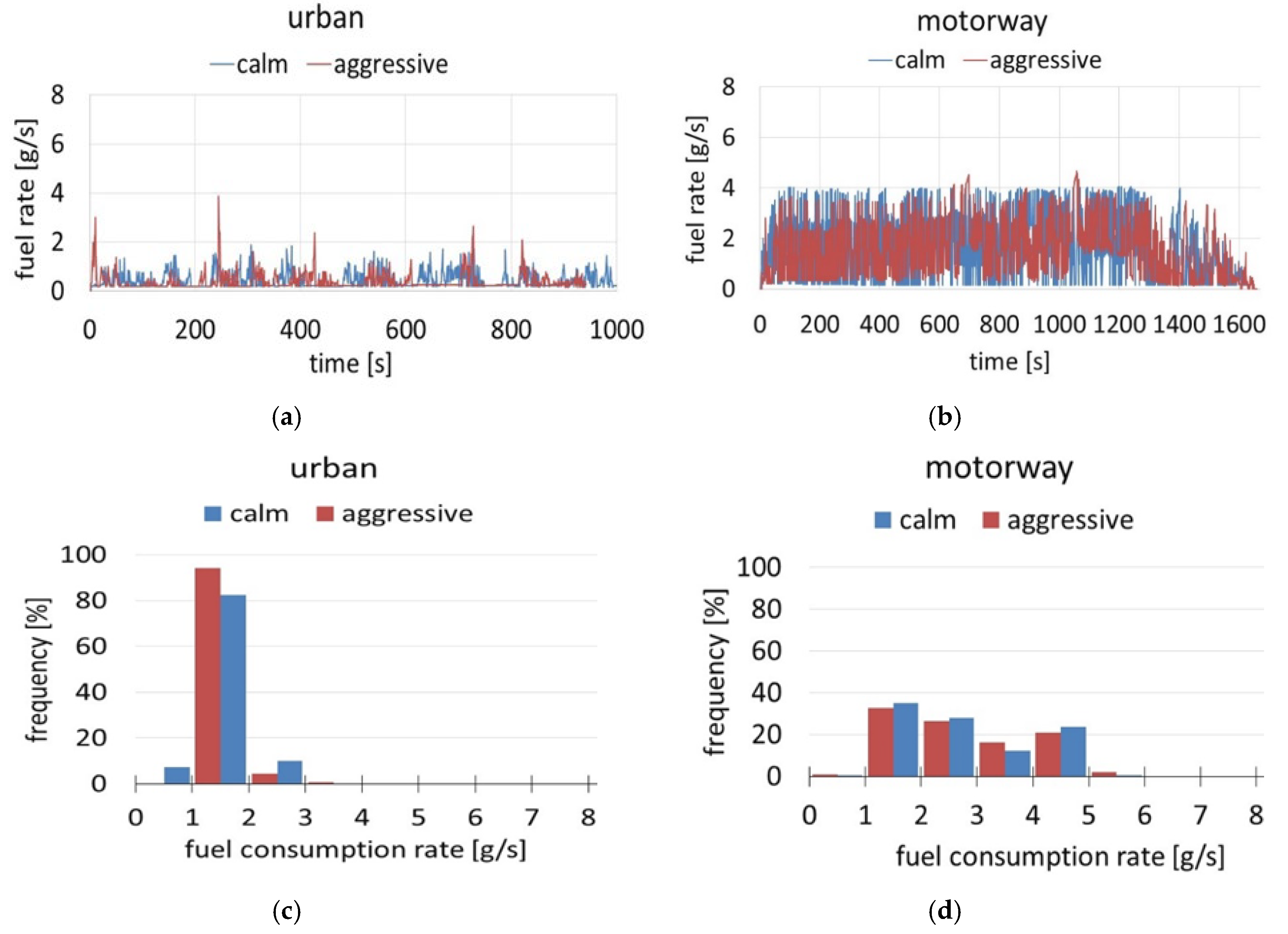
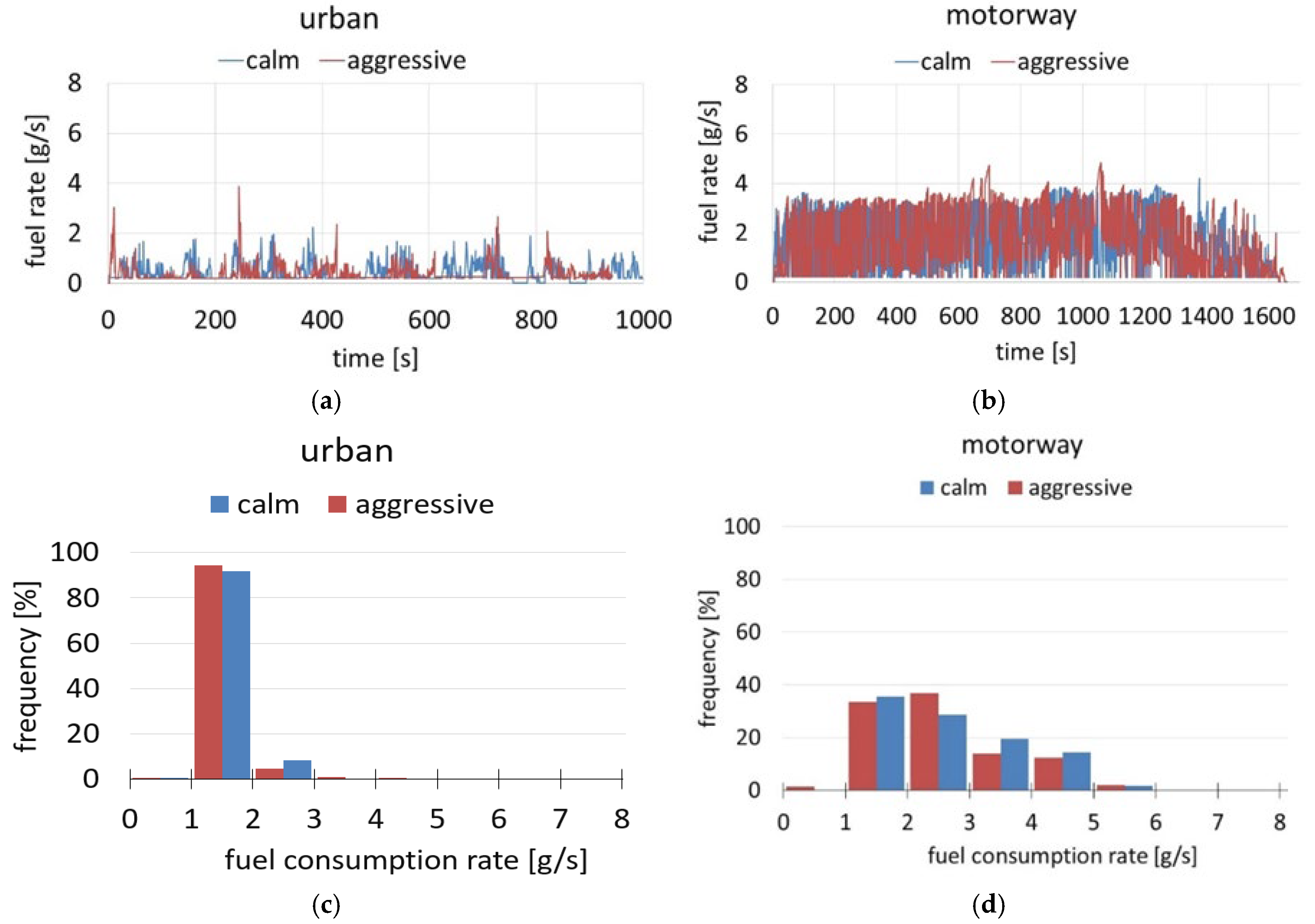
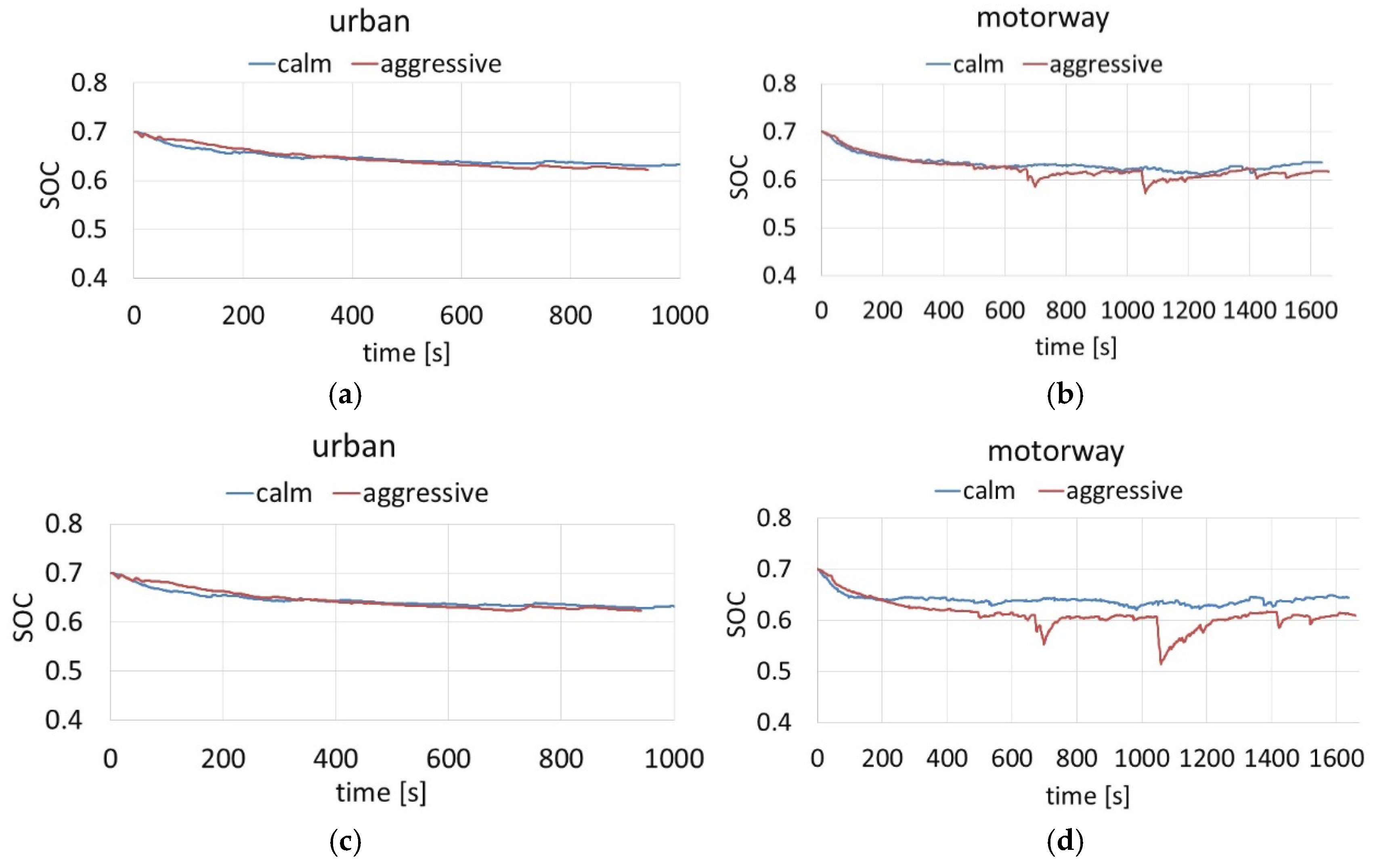
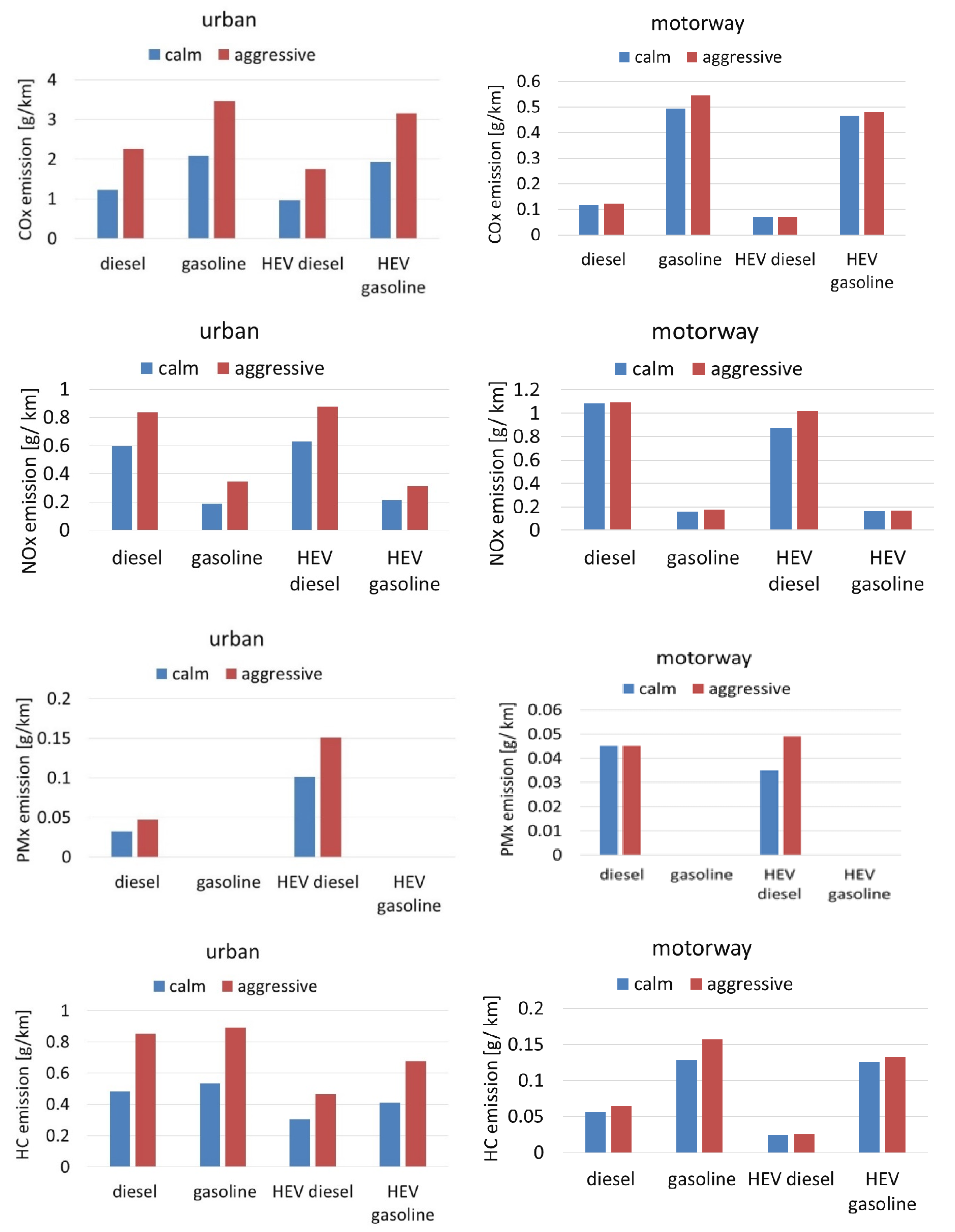
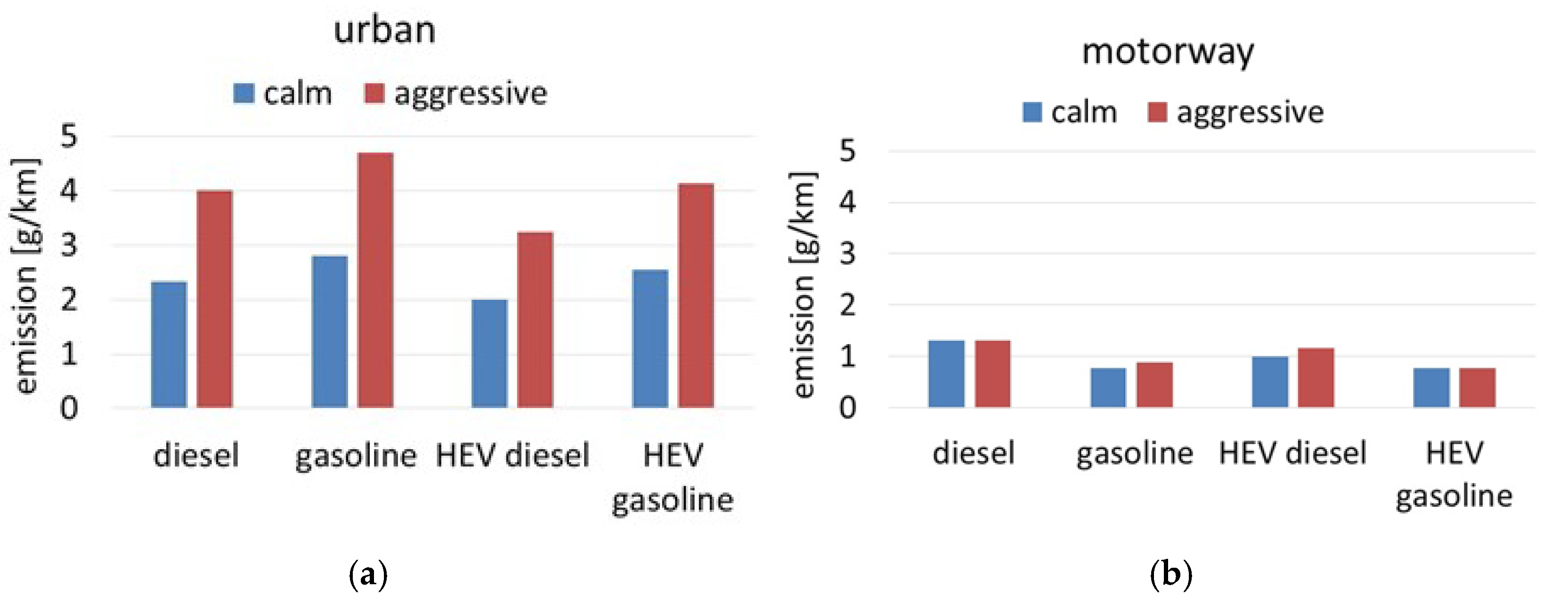
3. Simulation Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tillmann, W.A.; Hobbs, G.E. The accident-prone automobile driver. Am. J. Psychiatry 2006, 106, 321–331. [Google Scholar] [CrossRef] [PubMed]
- Sagberg, F.; Bianchi Piccinini, G.F.; Engström, J.A. Review of Research on Driving Styles and Road Safety. Hum. Factors 2015, 57, 1248–1275. [Google Scholar] [CrossRef] [PubMed]
- Deng, Z.; Chu, D.; Wu, C.; He, Y.; Cui, J. Curve safe speed model considering driving style based on driver behaviour questionnaire. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 536–547. [Google Scholar] [CrossRef]
- Shahverdy, M.; Fathy, M.; Berangi, R.; Sabokrou, M. Driver behavior detection and classification using deep convolutional neural networks. Expert Syst. Appl. 2020, 149, 113240. [Google Scholar] [CrossRef]
- Constantinescu, Z.; Marinoiu, C.; Vladoiu, M. Driving Style Analysis Using Data Mining Techniques. Int. J. Comput. Commun. Control 2010, 5, 654–663. [Google Scholar] [CrossRef]
- Li, G.; Li, S.E.; Cheng, B.; Green, P. Estimation of driving style in naturalistic highway traffic using maneuver transition probabilities. Transp. Res. Part C Emerg. Technol. 2017, 74, 113–125. [Google Scholar] [CrossRef]
- Cyganek, B.; Gruszczyński, S. Hybrid computer vision system for drivers’ eye recognition and fatigue monitoring. Neurocomputing 2014, 126, 78–94. [Google Scholar] [CrossRef]
- Li, G.; Wang, Y.; Zhu, F.; Sui, X.; Wang, N.; Qu, X.; Green, P. Drivers’ visual scanning behavior at signalized and unsignalized intersections: A naturalistic driving study in China. J. Saf. Res. 2019, 71, 219–229. [Google Scholar] [CrossRef]
- Lee, B.; Chung, W. Driver Alertness Monitoring Using Fusion of Facial Features and Bio-Signals. IEEE Sens. J. 2012, 12, 2416–2422. [Google Scholar] [CrossRef]
- Przepiorka, A.M.; Hill, T.; Blachnio, A.P.; Sullman, M.J.M.; Taylor, J.E.; Mamcarz, P. Psychometric properties of the Driving Behaviour Scale (DBS) among Polish drivers. Transp. Res. Part F Traffic Psychol. Behav. 2020, 73, 29–37. [Google Scholar] [CrossRef]
- Tement, S.; Plohl, N.; Horvat, M.; Musil, B.; Jakus, G.; Sodnik, J. Driving demands, stress reactivity and driving behavior: An interactional approach. Transp. Res. Part F Traffic Psychol. Behav. 2020, 69, 80–90. [Google Scholar] [CrossRef]
- Hyodo, S.; Yoshii, T.; Satoshi, M.; Hirotoshi, S. An analysis of the impact of driving time on the driver’s behavior using probe car data. Transp. Res. Procedia 2017, 21, 169–179. [Google Scholar] [CrossRef]
- Kovaceva, J.; Isaksson-Hellman, I.; Murgovski, N. Identification of aggressive driving from naturalistic data in car-following situations. J. Saf. Res. 2020, 73, 225–234. [Google Scholar] [CrossRef] [PubMed]
- Măirean, C.; Havârneanu, C.-E. The relationship between drivers’ illusion of superiority, aggressive driving, and self-reported risky driving behaviors. Transp. Res. Part F Traffic Psychol. Behav. 2018, 55, 167–174. [Google Scholar] [CrossRef]
- Havârneanu, C.E.; Jilavu, A.R.; Havârneanu, G.M. Digit Ratios as Correlates of Accident Involvement and Aggressive Driving—A Pilot Study. Procedia Soc. Behav. Sci. 2014, 127, 575–580. [Google Scholar] [CrossRef][Green Version]
- Eboli, L.; Mazzulla, G.; Pungillo, G. How to define the accident risk level of car drivers by combining objective and subjective measures of driving style. Transp. Res. Part F Traffic Psychol. Behav. 2017, 49, 29–38. [Google Scholar] [CrossRef]
- Zheng, F.; Li, J.; van Zuylen, H.; Lu, C. Influence of driver characteristics on emissions and fuel consumption. Transp. Res. Procedia 2017, 27, 624–631. [Google Scholar] [CrossRef]
- Ma, H.; Xie, H.; Huang, D.; Xiong, S. Effects of driving style on the fuel consumption of city buses under different road conditions and vehicle masses. Transp. Res. Part D Transp. Environ. 2015, 41, 205–216. [Google Scholar] [CrossRef]
- Tang, T.-Q.; Huang, H.-J.; Shang, H.-Y. Influences of the driver’s bounded rationality on micro driving behavior, fuel consumption and emissions. Transp. Res. Part D Transp. Environ. 2015, 41, 423–432. [Google Scholar] [CrossRef]
- Tzirakis, E.; Zannikos, F.; Stournas, S. Impact of driving style on fuel consumption and exhaust emissions: Defensive and aggressive driving style. In Proceedings of the 10th International Conference on Environmental Science and Technology, Kos Island, Greece, 5–7 September 2007; pp. 1497–1504. [Google Scholar]
- Faria, M.V.; Duarte, G.O.; Varella, R.A.; Farias, T.L.; Baptista, P.C. How do road grade, road type and driving aggressiveness impact vehicle fuel consumption? Assessing potential fuel savings in Lisbon, Portugal. Transp. Res. Part D Transp. Environ. 2019, 72, 148–161. [Google Scholar] [CrossRef]
- González, N.; Kindelán, J.C.; Zapata, F. Influence of driving style on fuel consumption and Emissions in diesel-powered passenger car. In Proceedings of the 18th International Symposium Transport and Air Pollution, TAP 2010, Dübendorf, Switzerland, 18–19 May 2010; pp. 1–6. [Google Scholar]
- Szumska, E.; Jurecki, R.; Pawełczyk, M. Evaluation of the use of hybrid electric powertrain system in urban traffic conditions. Eksploat. I Niezawodn. Maint. Reliab. 2020, 22, 154–160. [Google Scholar] [CrossRef]
- Bayindir, Ç.K.; Gözüküçük, M.A.; Teke, A. A comprehensive overview of hybrid electric vehicle: Powertrain configurations, powertrain control techniques and electronic control units. Energy Convers. Manag. 2011, 52, 1305–1313. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Wang, Y.; Hao, C.; Ge, Y.; Hao, L.; Tan, J.; Wang, X.; Zhang, P.; Wang, Y.; Tian, W.; Lin, Z.; et al. Fuel consumption and emission performance from light-duty conventional/hybrid-electric vehicles over different cycles and real driving tests. Fuel 2020, 278, 118340. [Google Scholar] [CrossRef]
- Hiermann, G.; Hartl, R.F.; Puchinger, J.; Vidal, T. Routing a mix of conventional, plug-in hybrid, and electric vehicles. Eur. J. Oper. Res. 2019, 272, 235–248. [Google Scholar] [CrossRef]
- Zahabi, S.A.H.; Miranda-Moreno, L.; Barla, P.; Vincent, B. Fuel economy of hybrid-electric versus conventional gasoline vehicles in real-world conditions: A case study of cold cities in Quebec, Canada. Transp. Res. Part D Transp. Environ. 2014, 32, 184–192. [Google Scholar] [CrossRef]
- Shinar, D.; Compton, R. Aggressive driving: An observational study of driver, vehicle, and situational variables. Accid. Anal. Prev. 2004, 36, 429–437. [Google Scholar] [CrossRef]
- Abou-Zeid, M.; Kaysi, I.; Al-Naghi, H. Measuring aggressive driving behaviour using a driving simulator: An exploratory study. In Proceedings of the 3rd International Conference on Road Safety and Simulation, Indianapolis, IN, USA, 14–16 September 2011; pp. 1–19. [Google Scholar]
- Islam, M.; Mannering, F. A temporal analysis of driver-injury severities in crashes involving aggressive and non-aggressive driving. Anal. Methods Accid. Res. 2020, 27, 100128. [Google Scholar] [CrossRef]
- Webster, G.D.; DeWall, C.N.; Pond, R.S., Jr.; Deckman, T.; Jonason, P.K.; Le, B.M.; Smith, C.V. The brief aggression questionnaire: Psychometric and behavioral evidence for an efficient measure of trait aggression. Aggress. Behav. 2014, 40, 120–139. [Google Scholar] [CrossRef]
- Konopka, K.; Rajchert, J.; Dominiak-Kochanek, M. The Influence of Aggression-Evoking Cues on Aggressive Cognitions in Males and Females: Different Procedures—Similar Effects. Curr. Psychol. 2020, 39, 128–141. [Google Scholar] [CrossRef]
- Alonso, F.; Esteban, C.; Montoro, L.; Serge, A. Conceptualization of aggressive driving behaviors through a Perception of aggressive driving scale (PAD). Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 415–426. [Google Scholar] [CrossRef]
- Lin, N.; Zong, C.; Tomizuka, M.; Song, P.; Zhang, X.; Li, G. An Overview on Study of Identification of Driver Behavior Characteristics for Automotive Control. Math. Probl. Eng. 2014, 569109. [Google Scholar] [CrossRef]
- Ma, Y.; Tang, K.; Chen, S.; Khattak, A.J.; Pan, P. On-line aggressive driving identification based on in-vehicle kinematic parameters under naturalistic driving conditions. Transp. Res. Part. C Emerg. Technol. 2020, 114, 554–571. [Google Scholar] [CrossRef]
- Eboli, L.; Mazzulla, G.; Pungillo, G. Combining speed and acceleration to define car users’ safe or unsafe driving behaviour. Transp. Res. Part. C Emerg. Technol. 2016, 68, 113–125. [Google Scholar] [CrossRef]
- Feng, F.; Bao, S.; Sayer, J.R.; Flannagan, C.; Manser, M.; Wunderlich, R. Can vehicle longitudinal jerk be used to identify aggressive drivers? An examination using naturalistic driving data. Accid. Anal. Prev. 2017, 104, 25–136. [Google Scholar] [CrossRef] [PubMed]
- Miles, D.E.; Johnson, G.L. Aggressive driving behaviors: Are there psychological and attitudinal predictors? Transp. Res. Part. F Traffic Psychol. Behav. 2003, 6, 147–161. [Google Scholar] [CrossRef]
- Krahé, B. Predictors of women’s aggressive driving behavior. Aggress. Behav. Off. J. Int. Soc. Res. Aggress. 2005, 31, 537–546. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conventional | Hybrid | |||
|---|---|---|---|---|
| Diesel | Gasoline | HEV Diesel | HEV Gasoline | |
| Engine power (kW) | 95 | 95 | 65 | 65 |
| Electric machine power (kW) | – | – | 75 | 75 |
| Battery capacity (kWh) | – | – | 4.6 | 4.6 |
| Weight (kg) | – | – | 64 | 64 |
| Urban | Motorway | |||||||
|---|---|---|---|---|---|---|---|---|
| COx | NOx | PMx | HC | COx | NOx | PMx | HC | |
| Diesel | 43% | 46% | 29% | 32% | 13% | 3% | 0% | 0% |
| Gasoline | 40% | 40% | 46% | – | 18% | 9% | 10% | – |
| HEV diesel | 35% | 45% | 28% | 33% | 4% | 0% | 14% | 29% |
| HEV gasoline | 39% | 39% | 31% | – | 5% | 3% | 2% | – |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Szumska, E.M.; Jurecki, R. The Effect of Aggressive Driving on Vehicle Parameters. Energies 2020, 13, 6675. https://doi.org/10.3390/en13246675
Szumska EM, Jurecki R. The Effect of Aggressive Driving on Vehicle Parameters. Energies. 2020; 13(24):6675. https://doi.org/10.3390/en13246675
Chicago/Turabian StyleSzumska, Emilia M., and Rafał Jurecki. 2020. "The Effect of Aggressive Driving on Vehicle Parameters" Energies 13, no. 24: 6675. https://doi.org/10.3390/en13246675
APA StyleSzumska, E. M., & Jurecki, R. (2020). The Effect of Aggressive Driving on Vehicle Parameters. Energies, 13(24), 6675. https://doi.org/10.3390/en13246675