Displacements of the Levitation Systems in the Vehicle Hyperloop



Abstract
1. Introduction
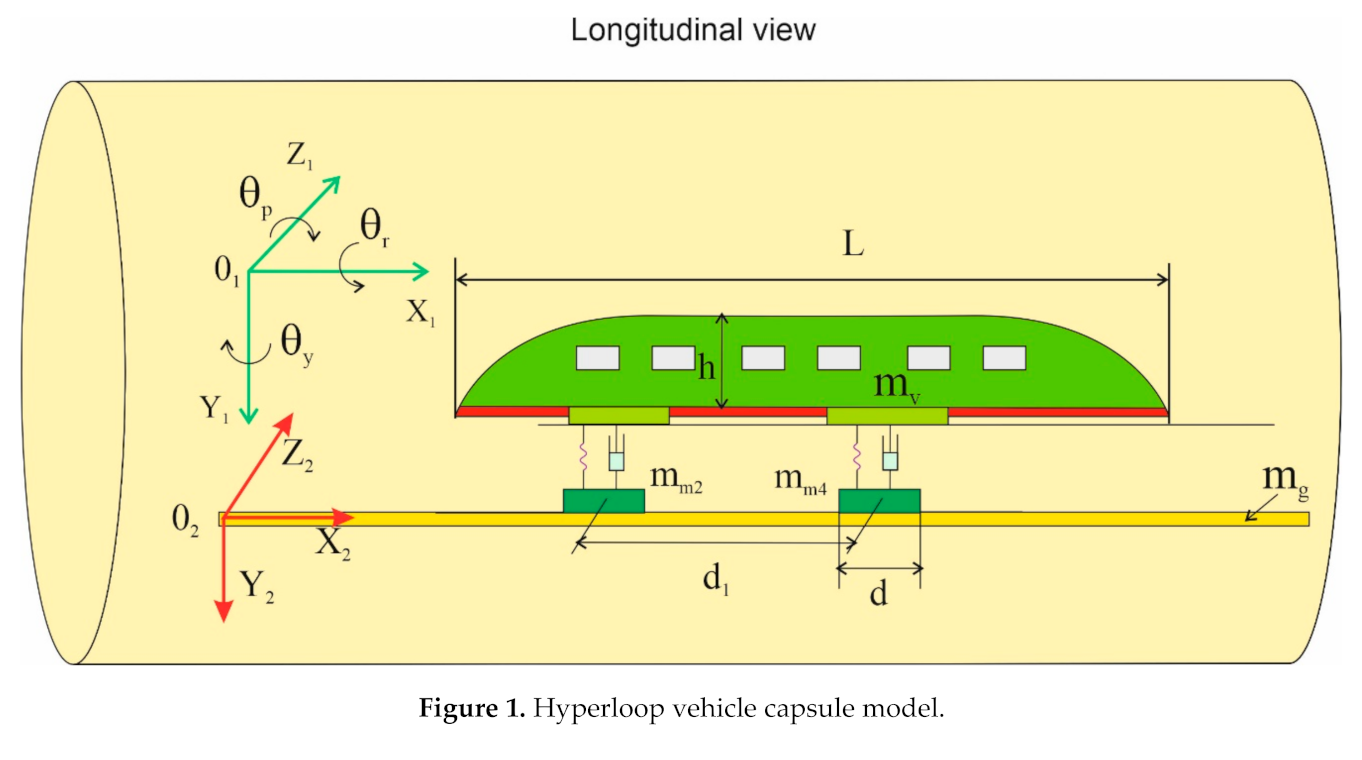
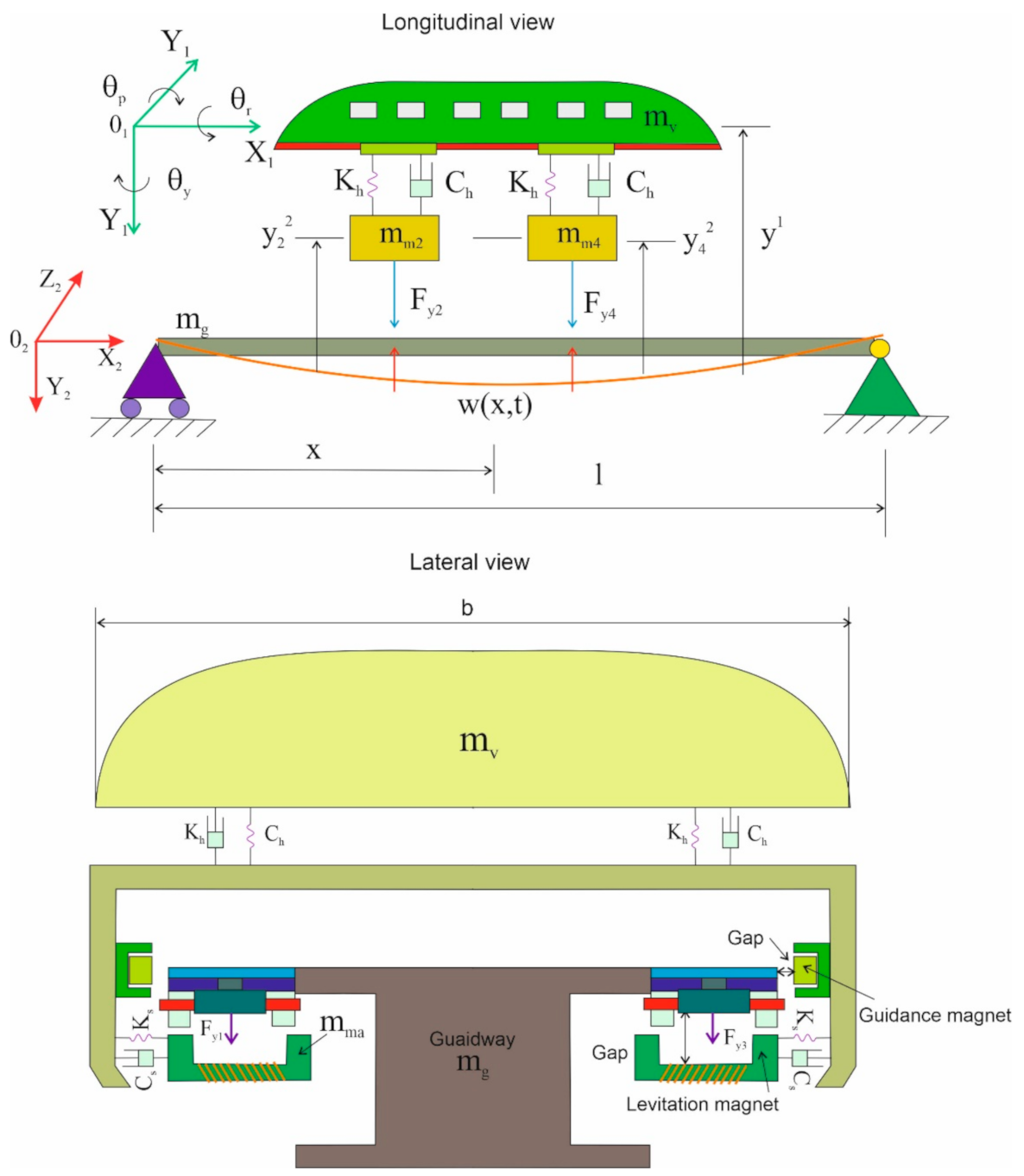
2. Construction of the Nominal Model
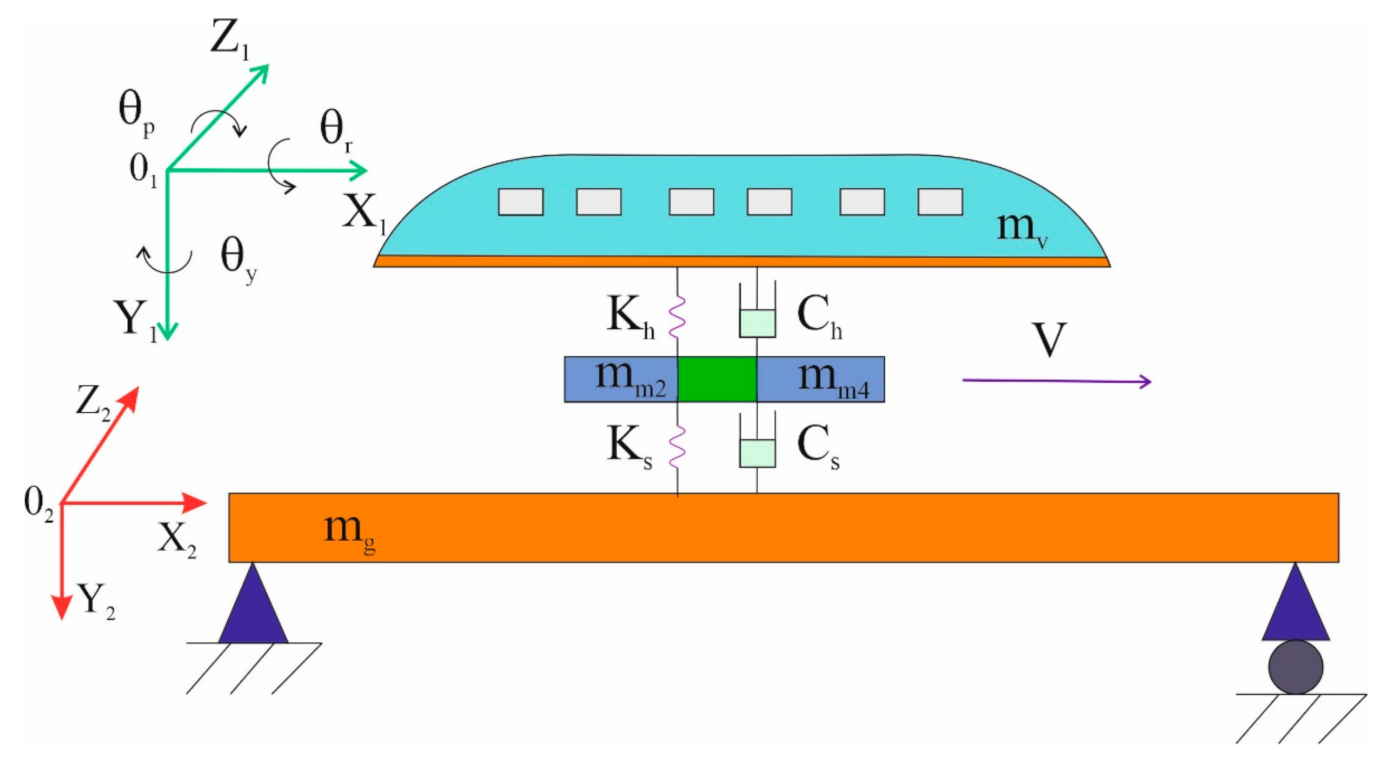
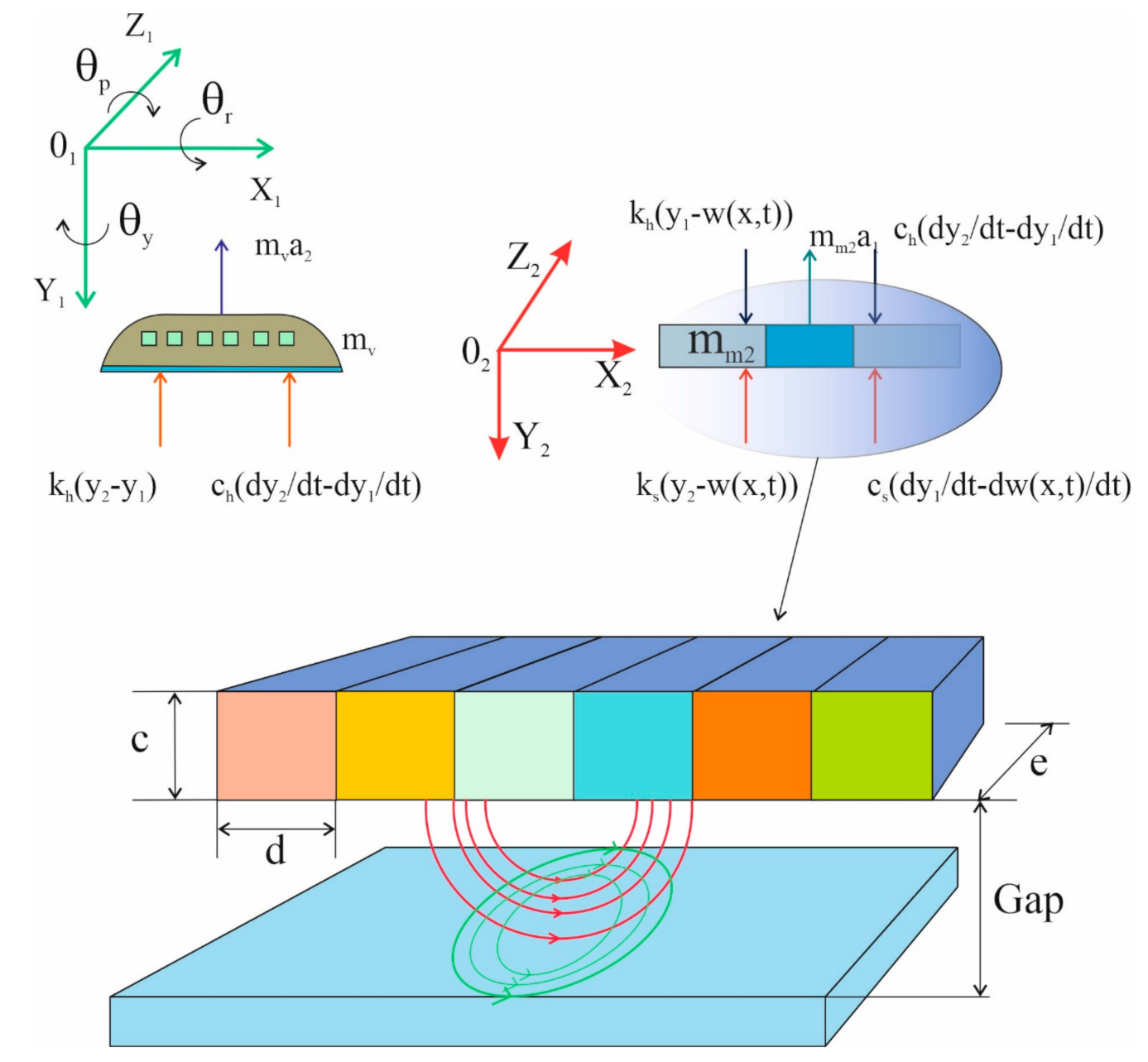
3. Hyperloop Equations of Motion
4. Subsection Discrete Mathematical Model of the Guideway Load by Hyperloop
5. Hyperloop Vehicle Modelling in MBS Software
- The distribution of the magnetic field throughout the Hyperloop capsule bogie is uniform along the entire face of the electromagnets.
- The penetration of the magnetic field of the electromagnet resulting from the phenomenon of magnetic levitation and its edge distribution is ignored.
- The set of electromagnets is a rigid body so that the levitation slots in its subsections can be defined by the slots at the ends of the electromagnet’s module.
- Inequalities in the guideway are ignored (neglected).
- The tube guideway will be considered as a rigid beam, so any deformations on the guideway can be ignored.
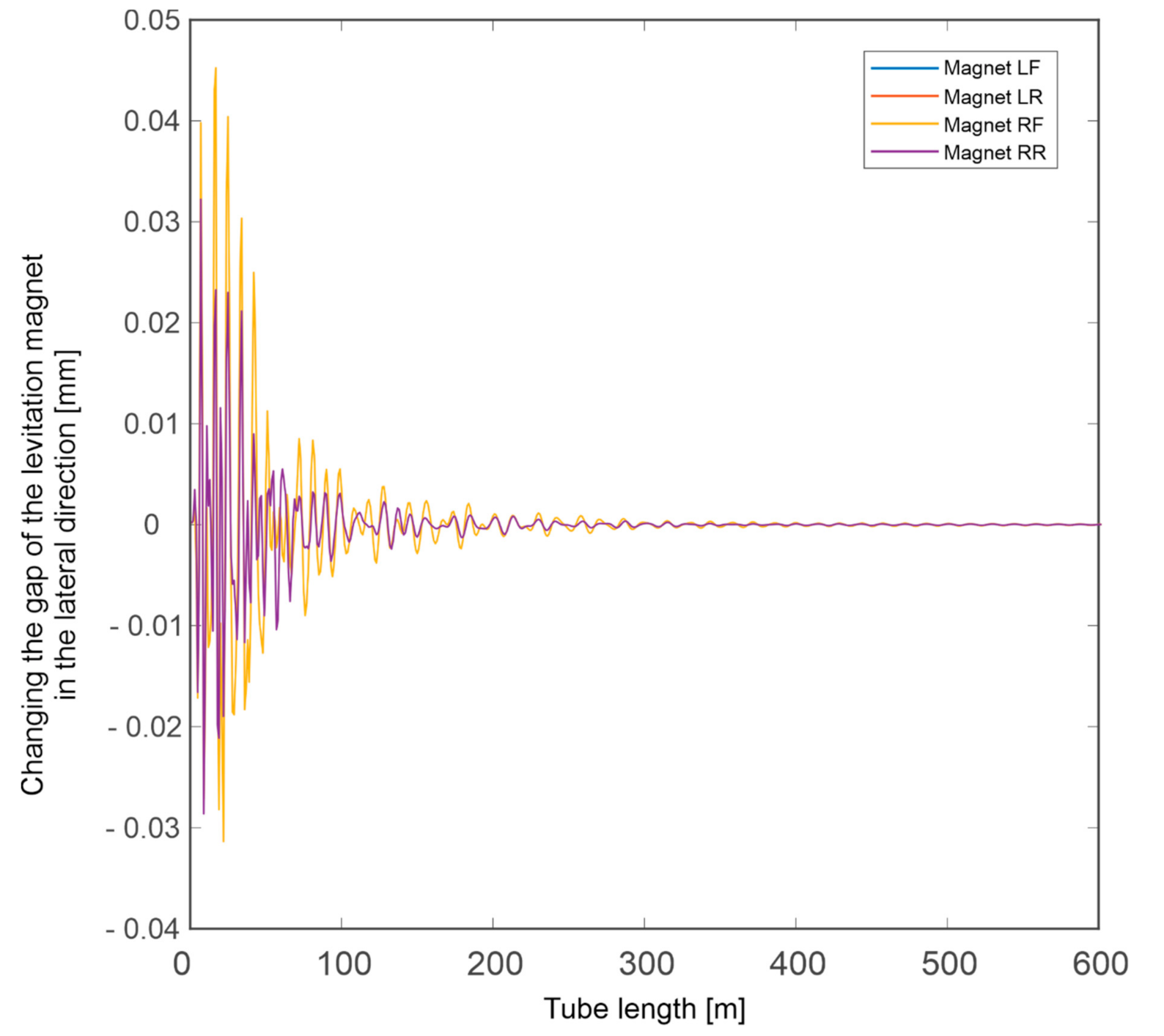
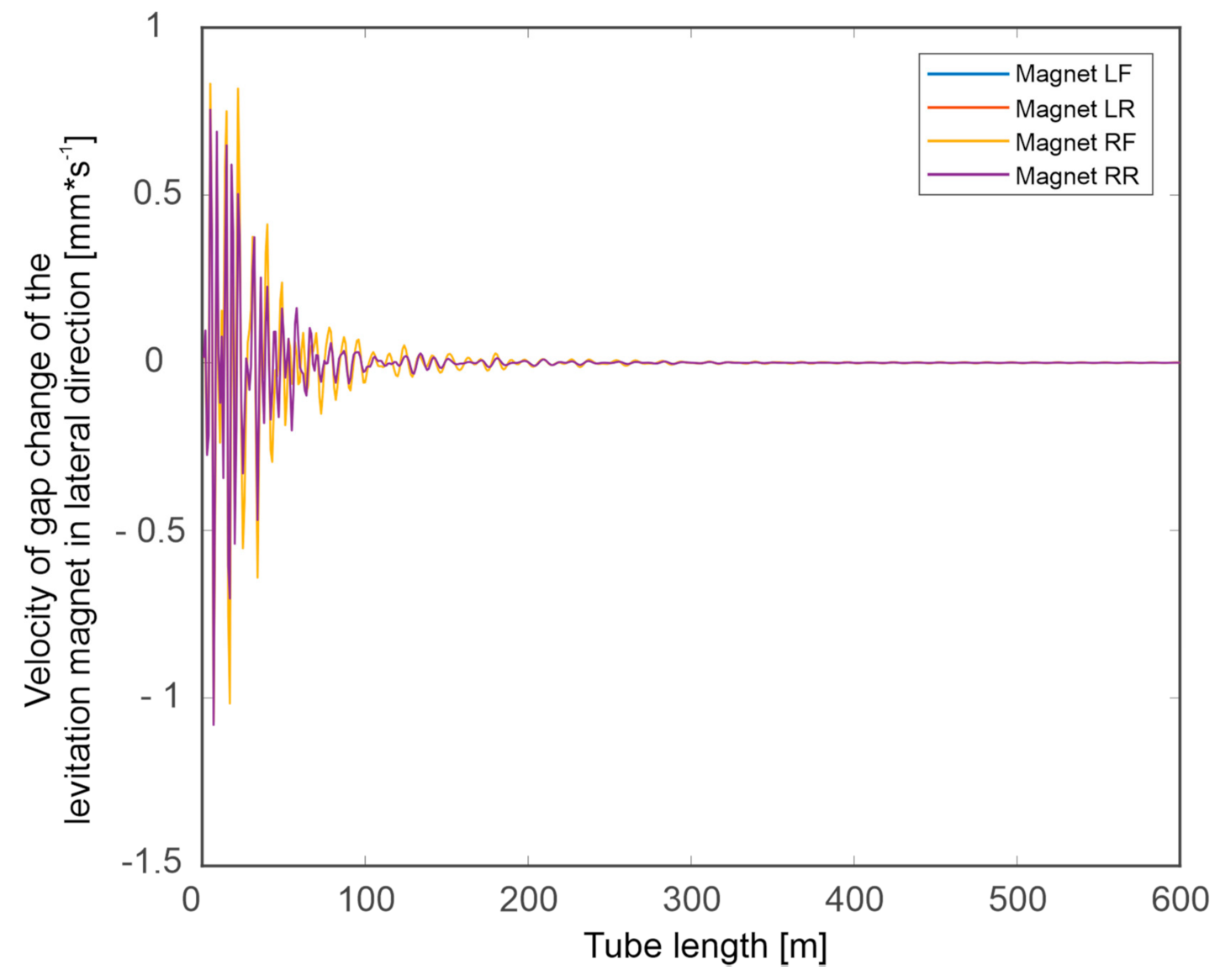
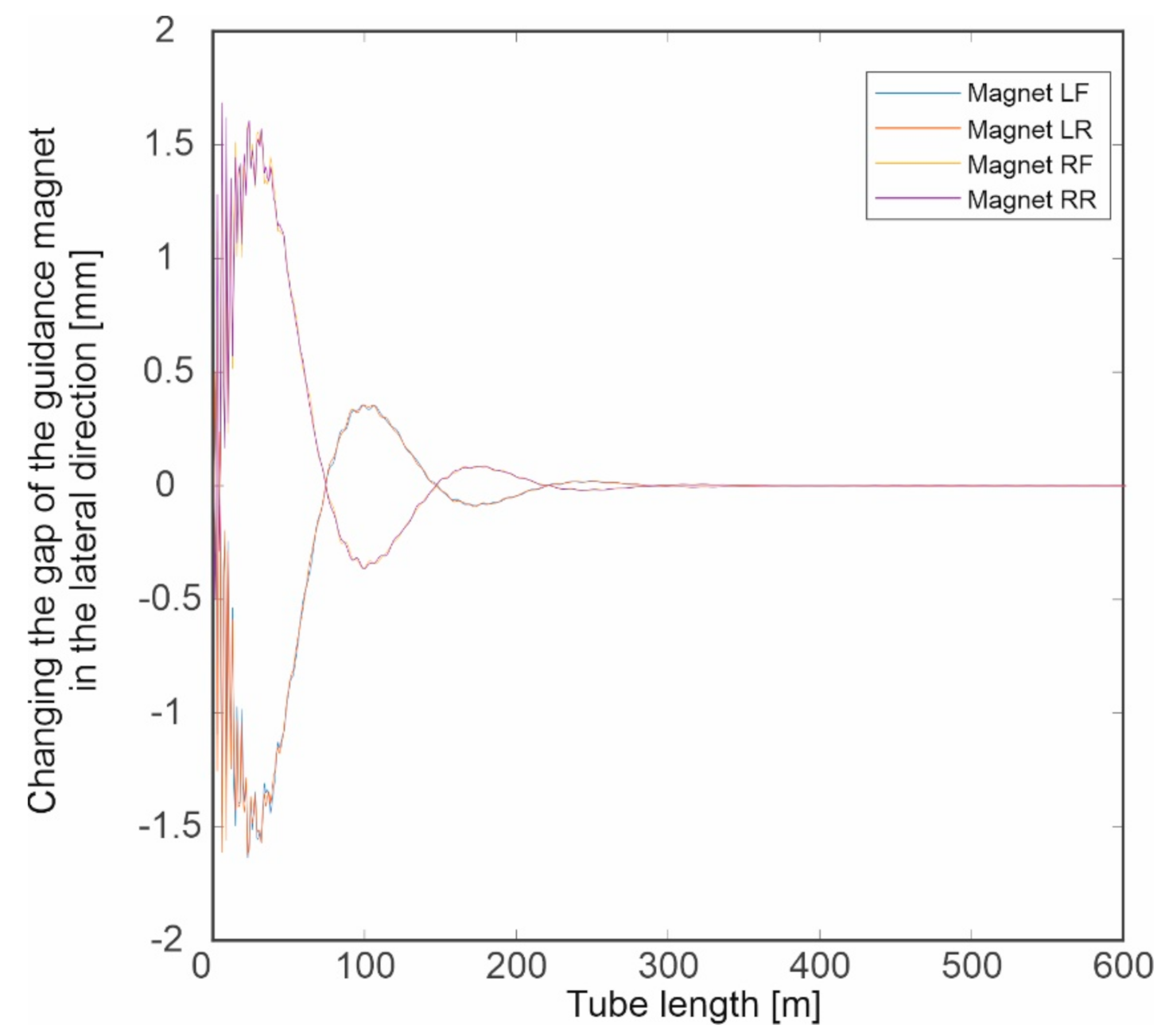
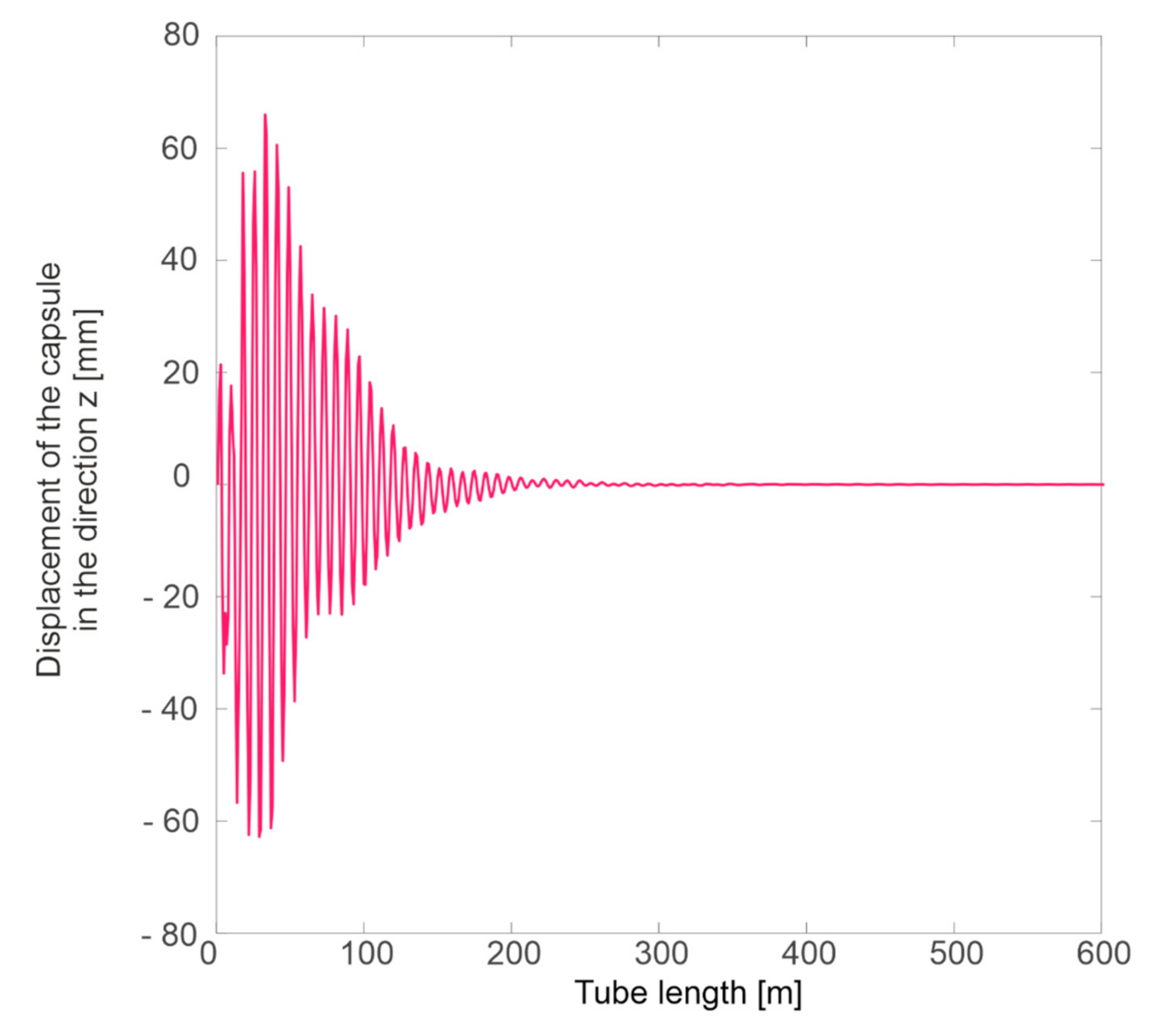
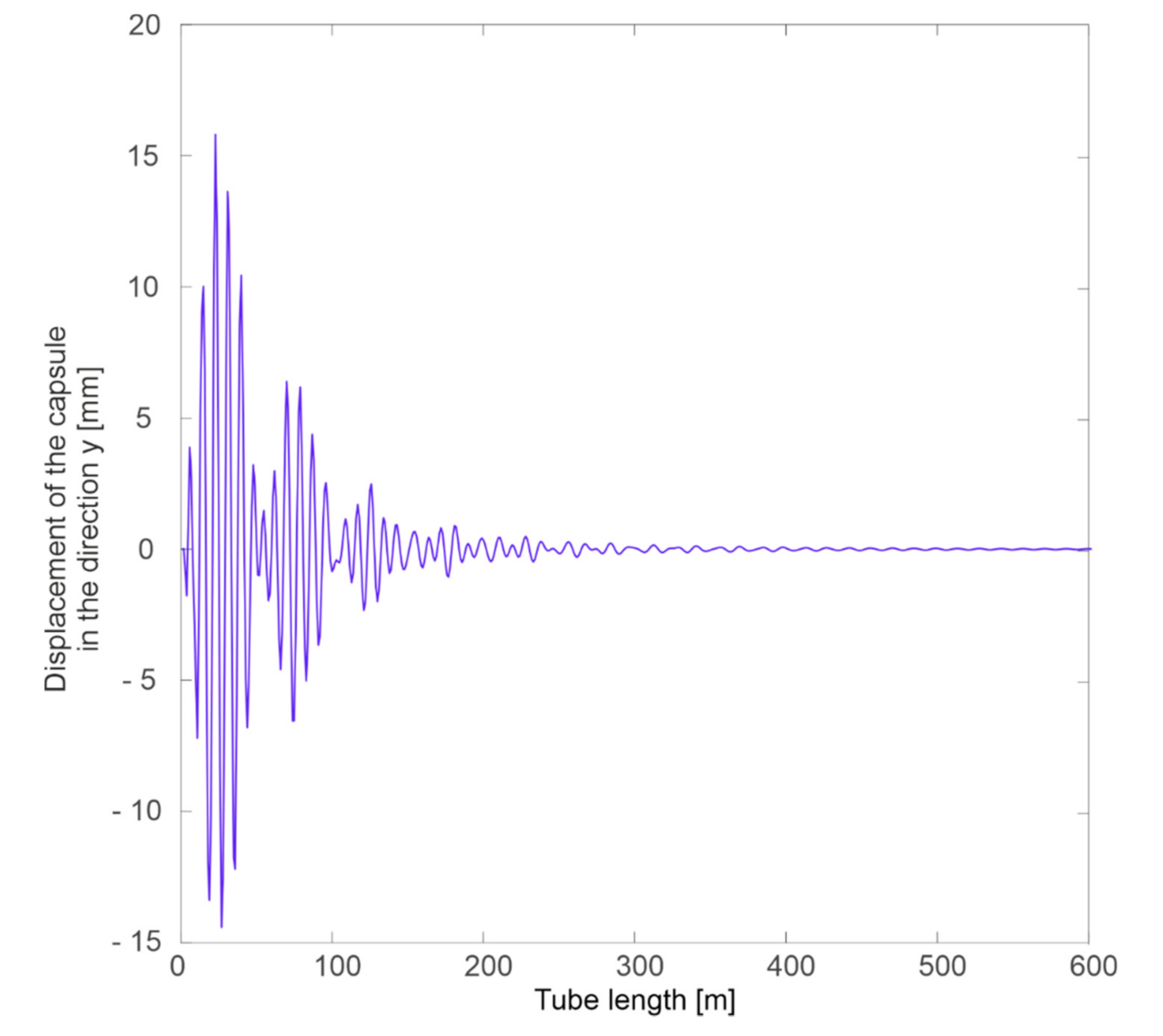
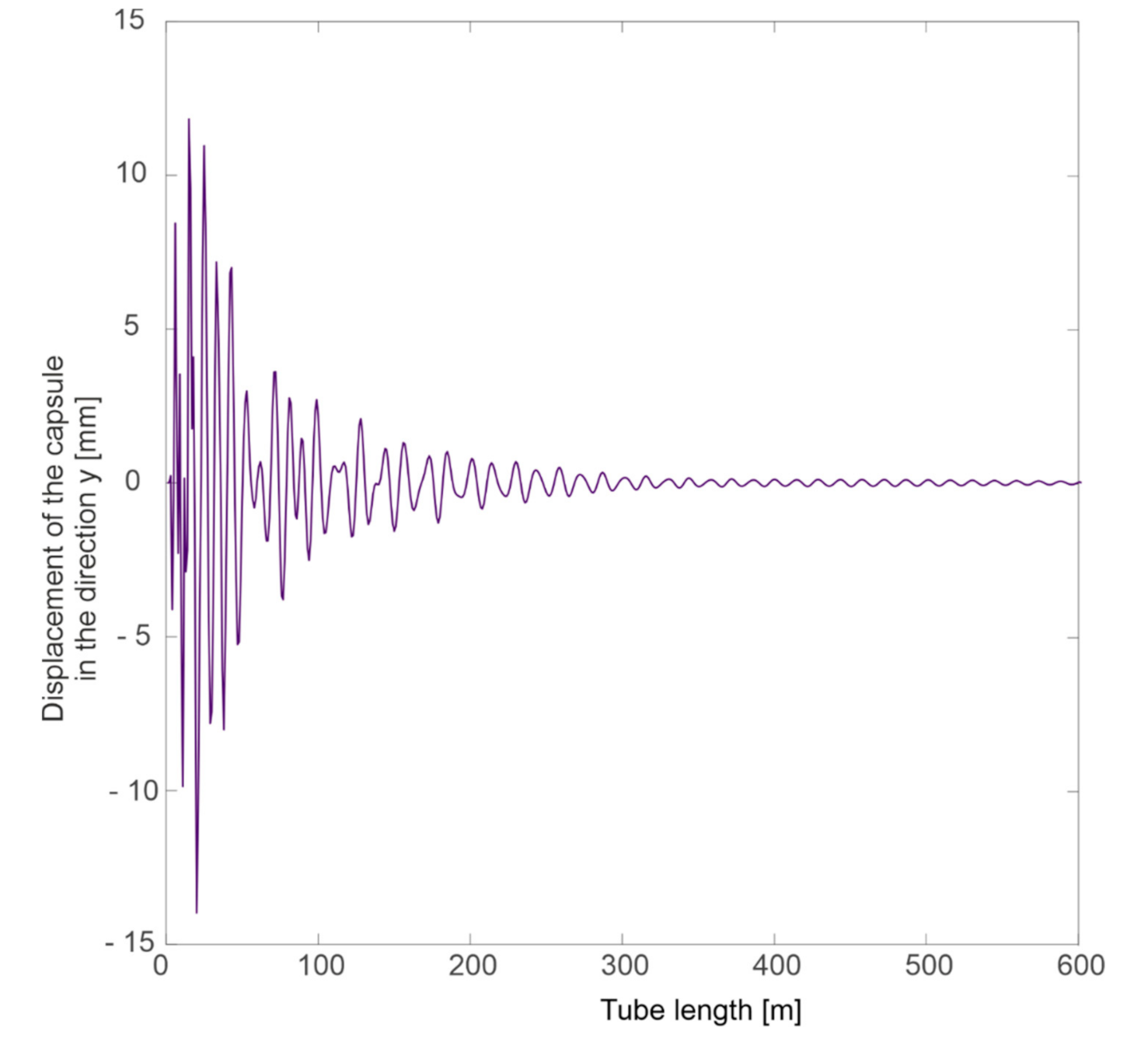
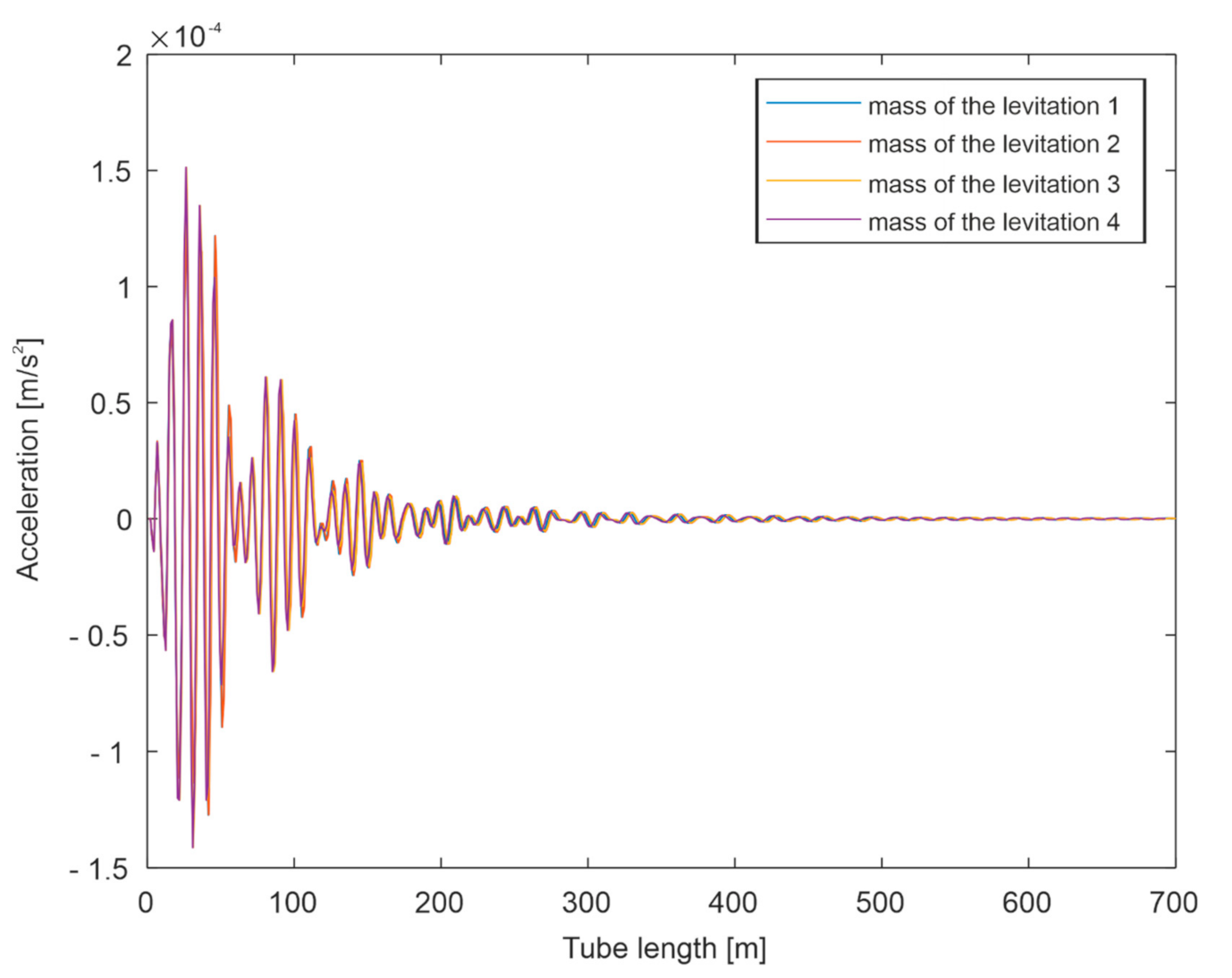
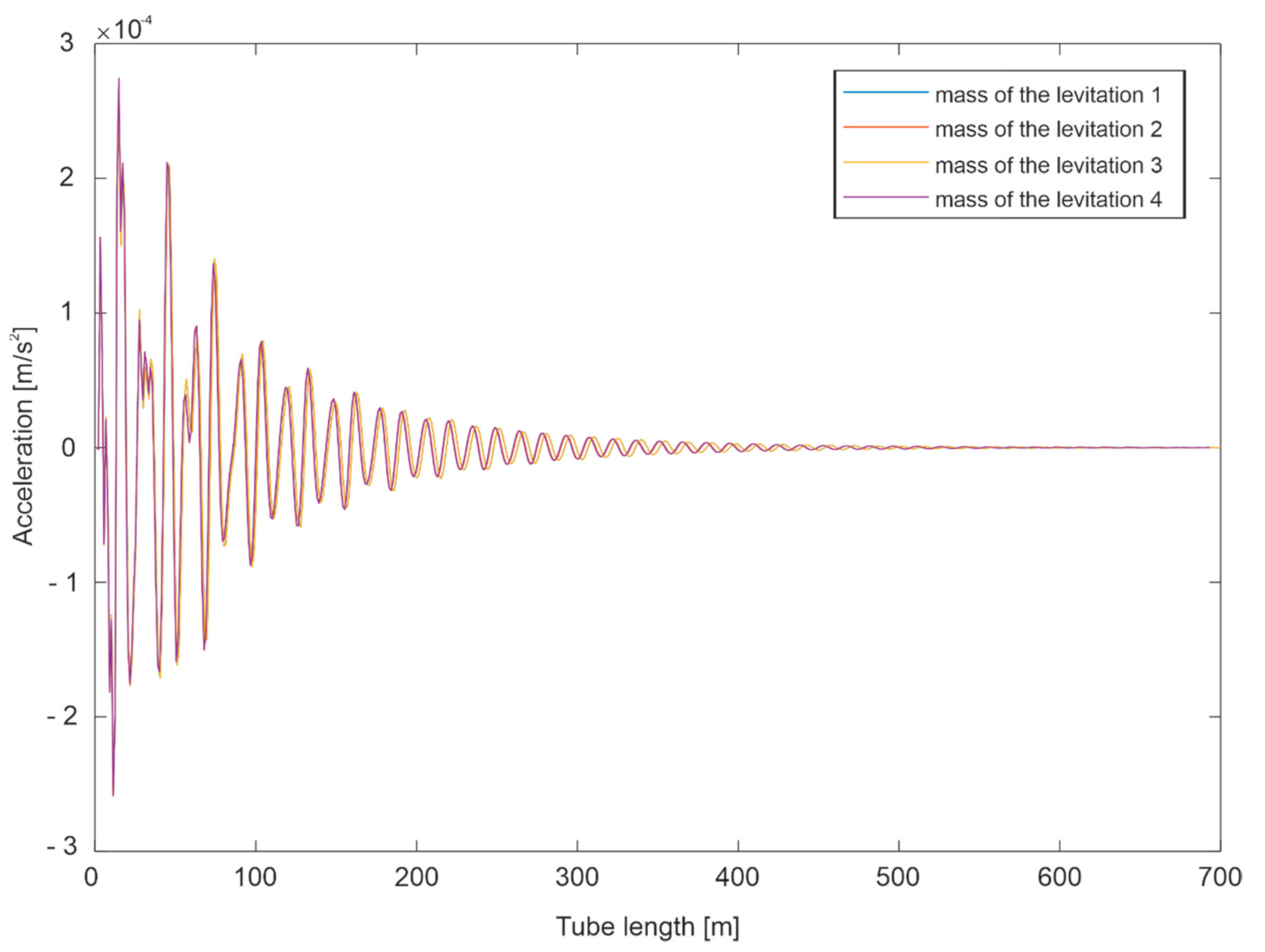
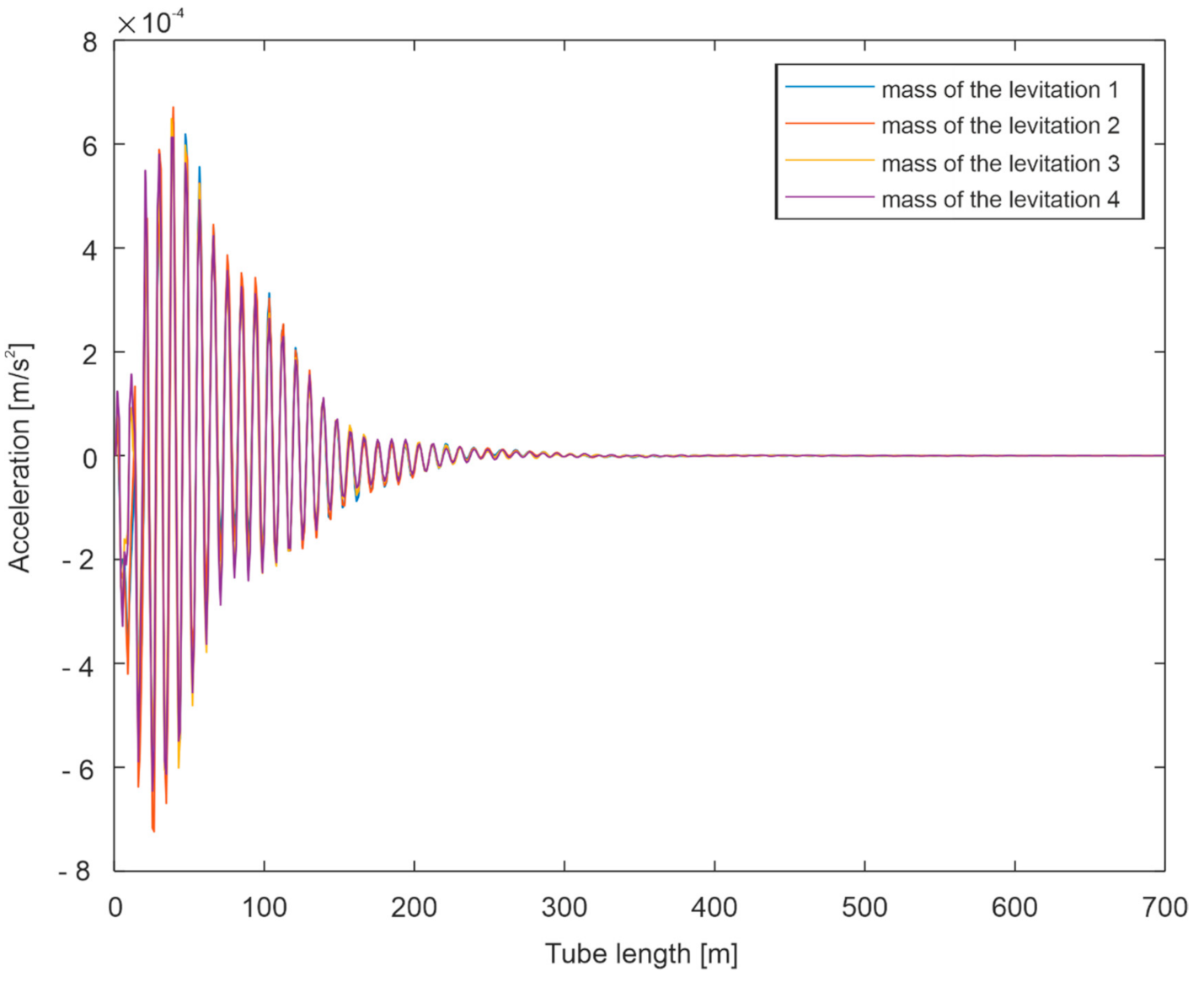
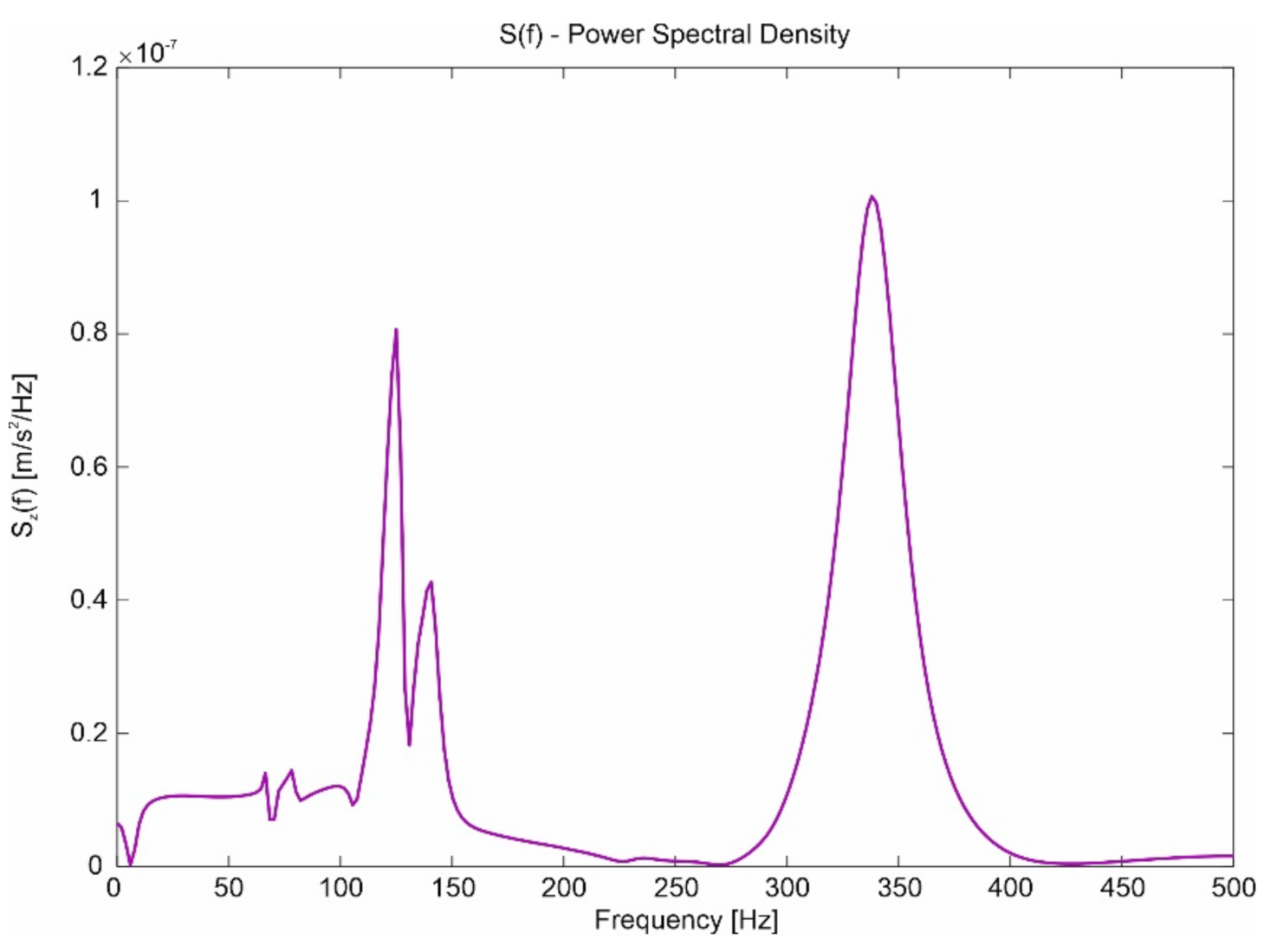
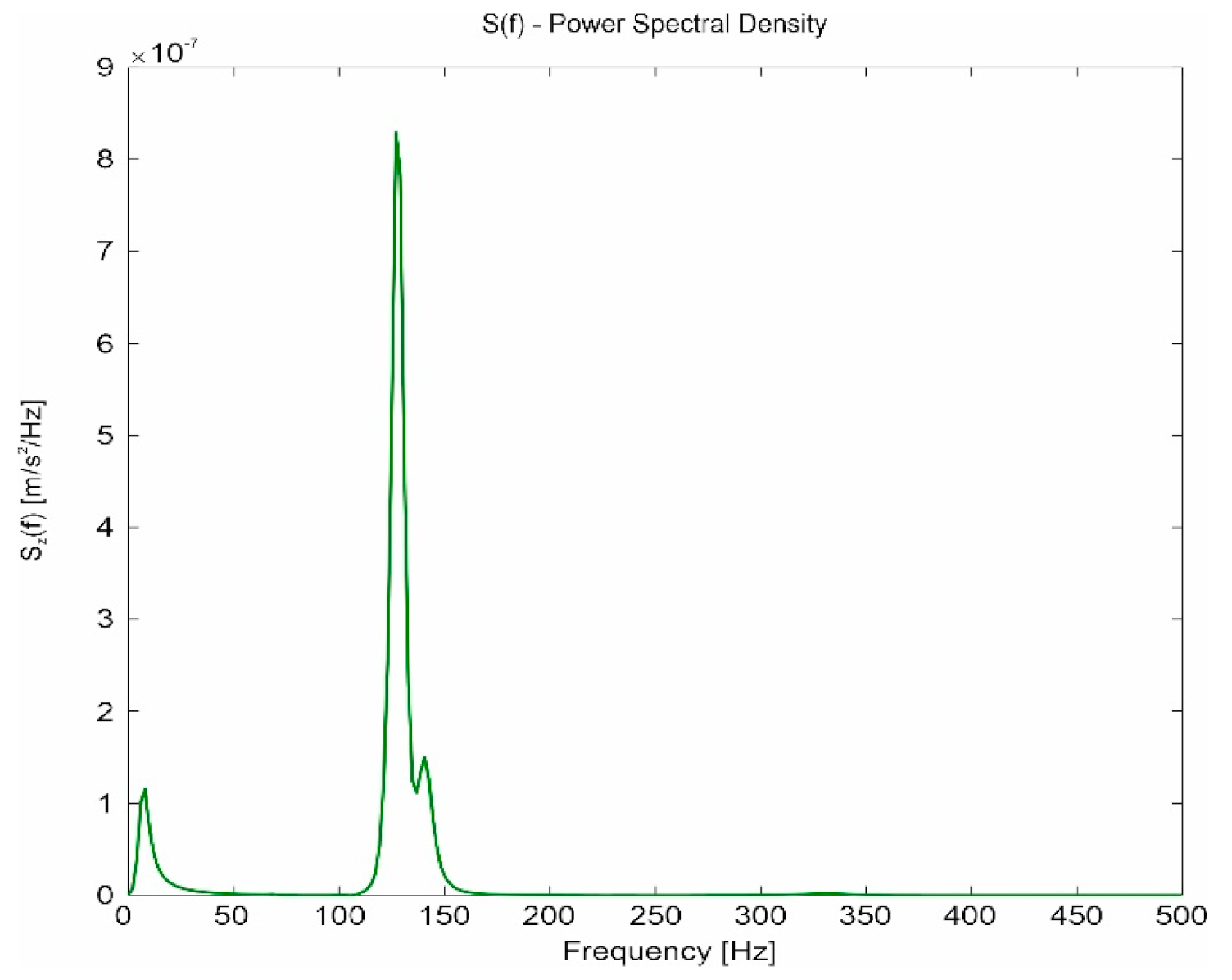
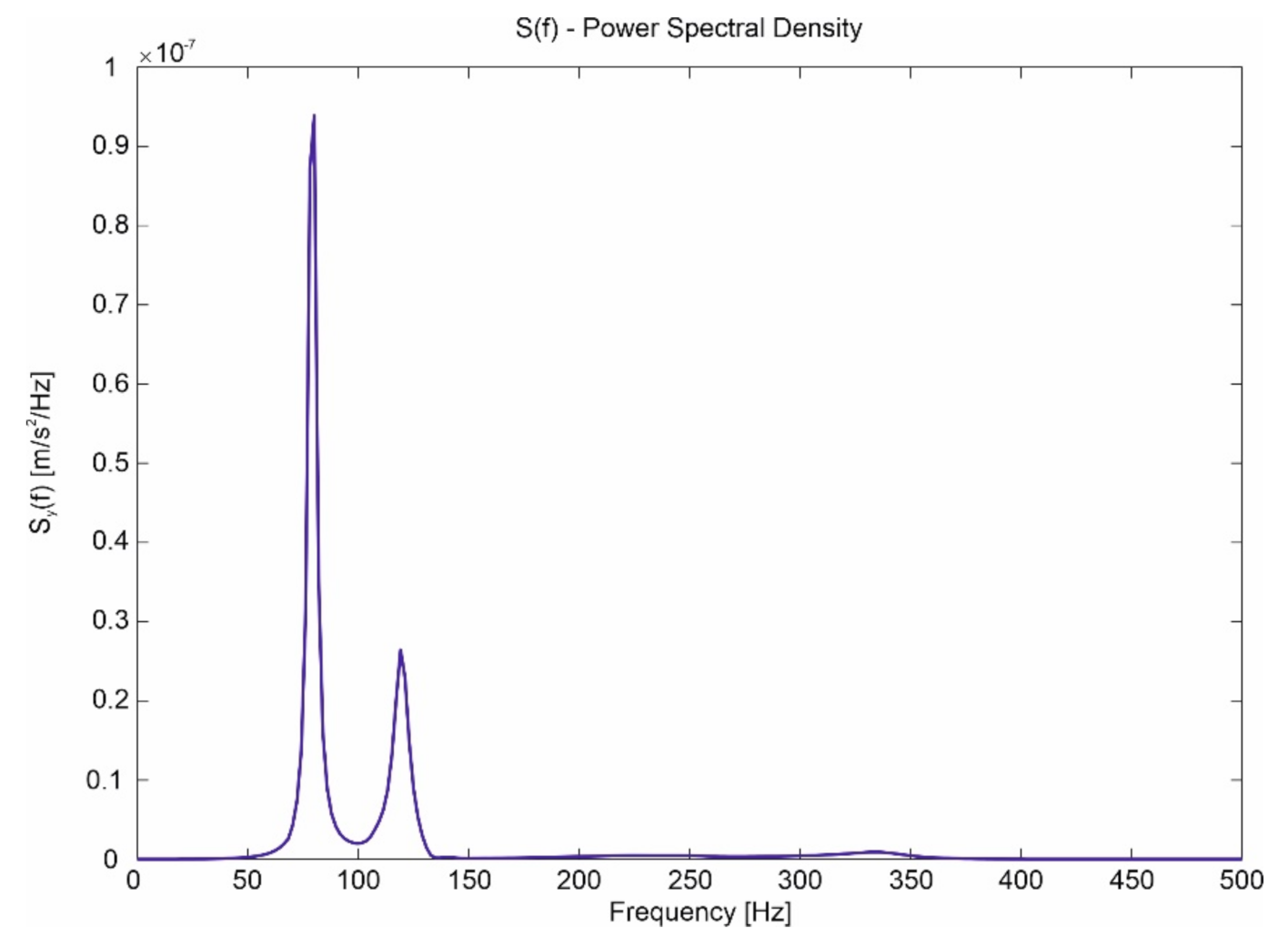
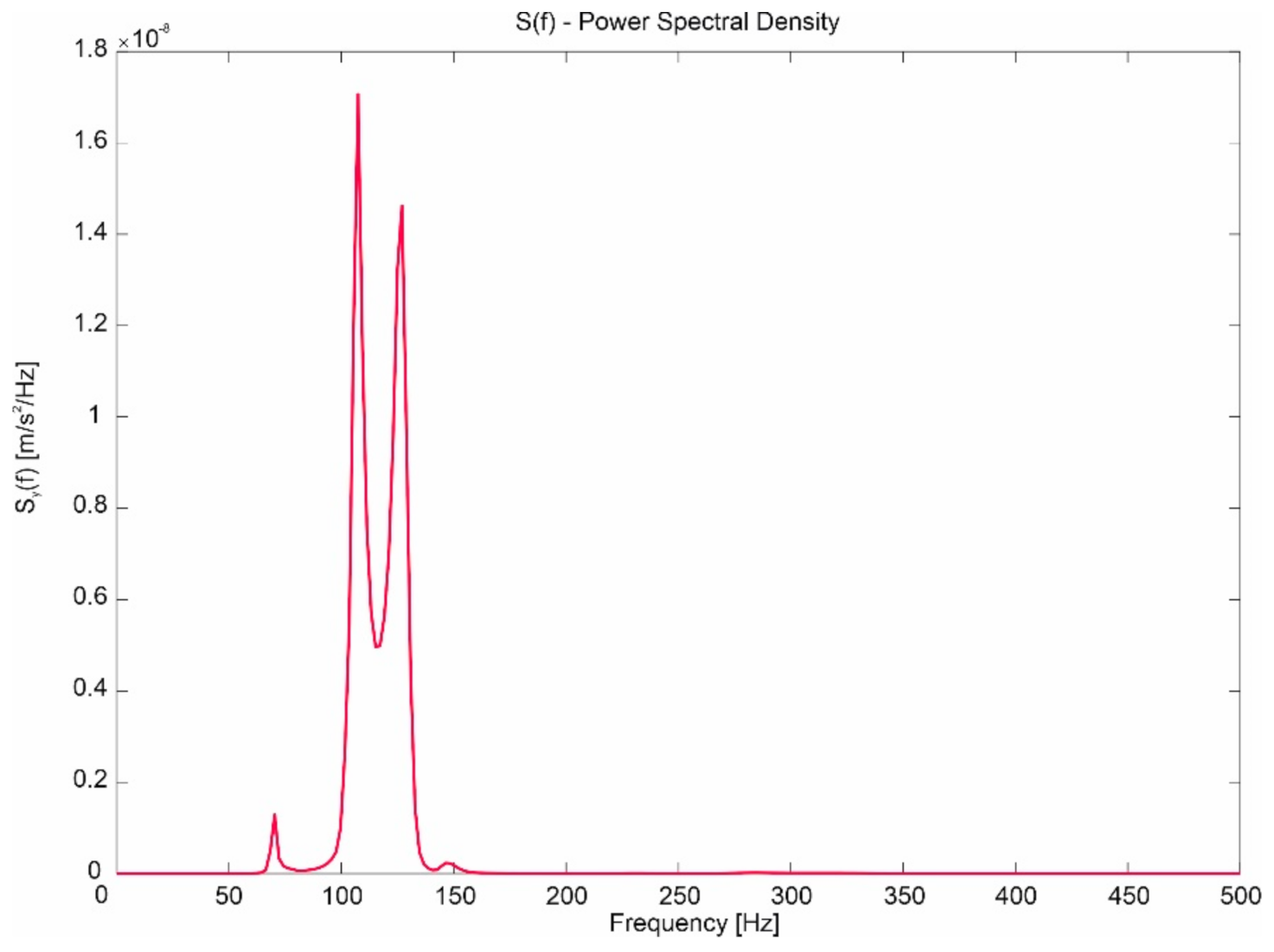
Simulation Tests
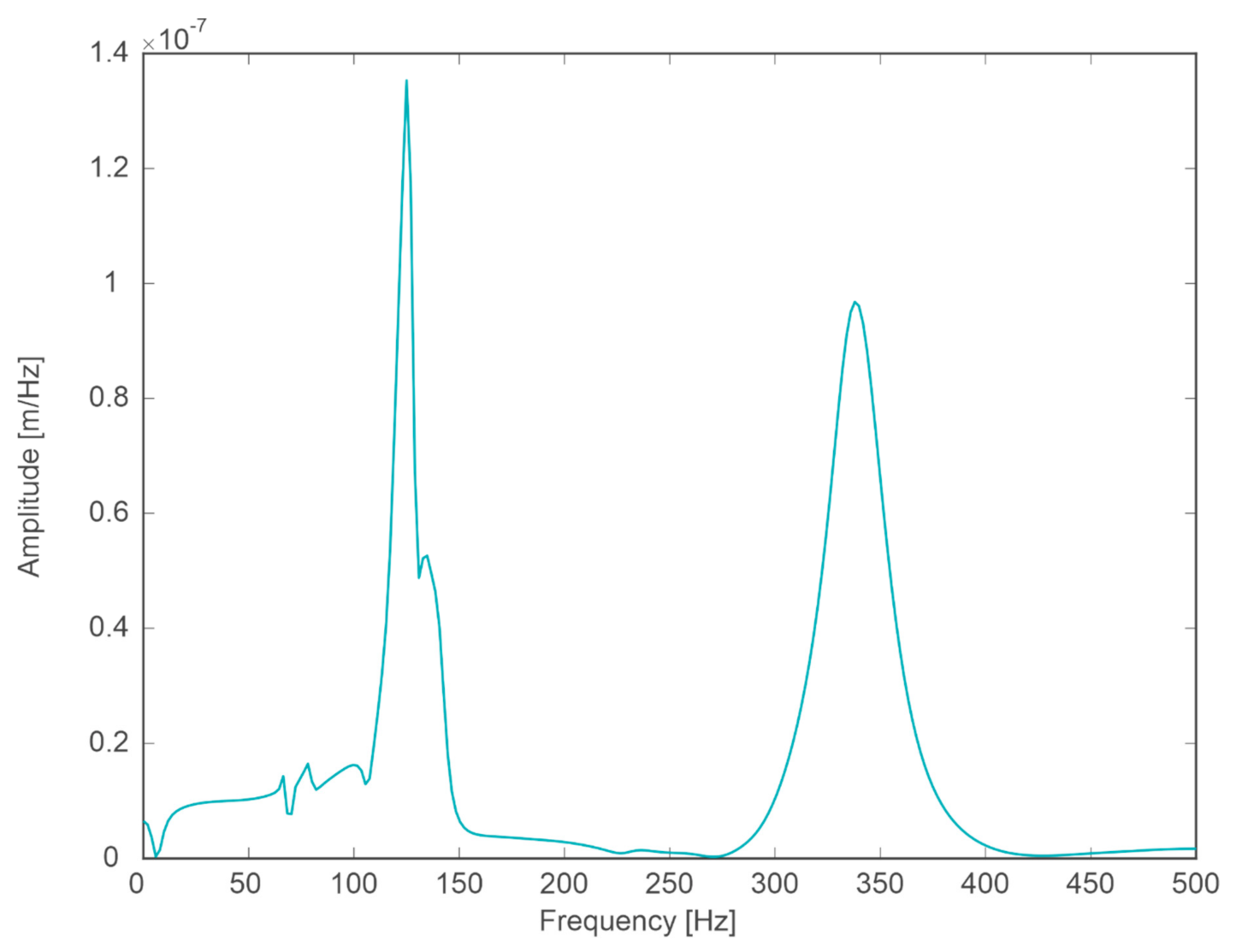
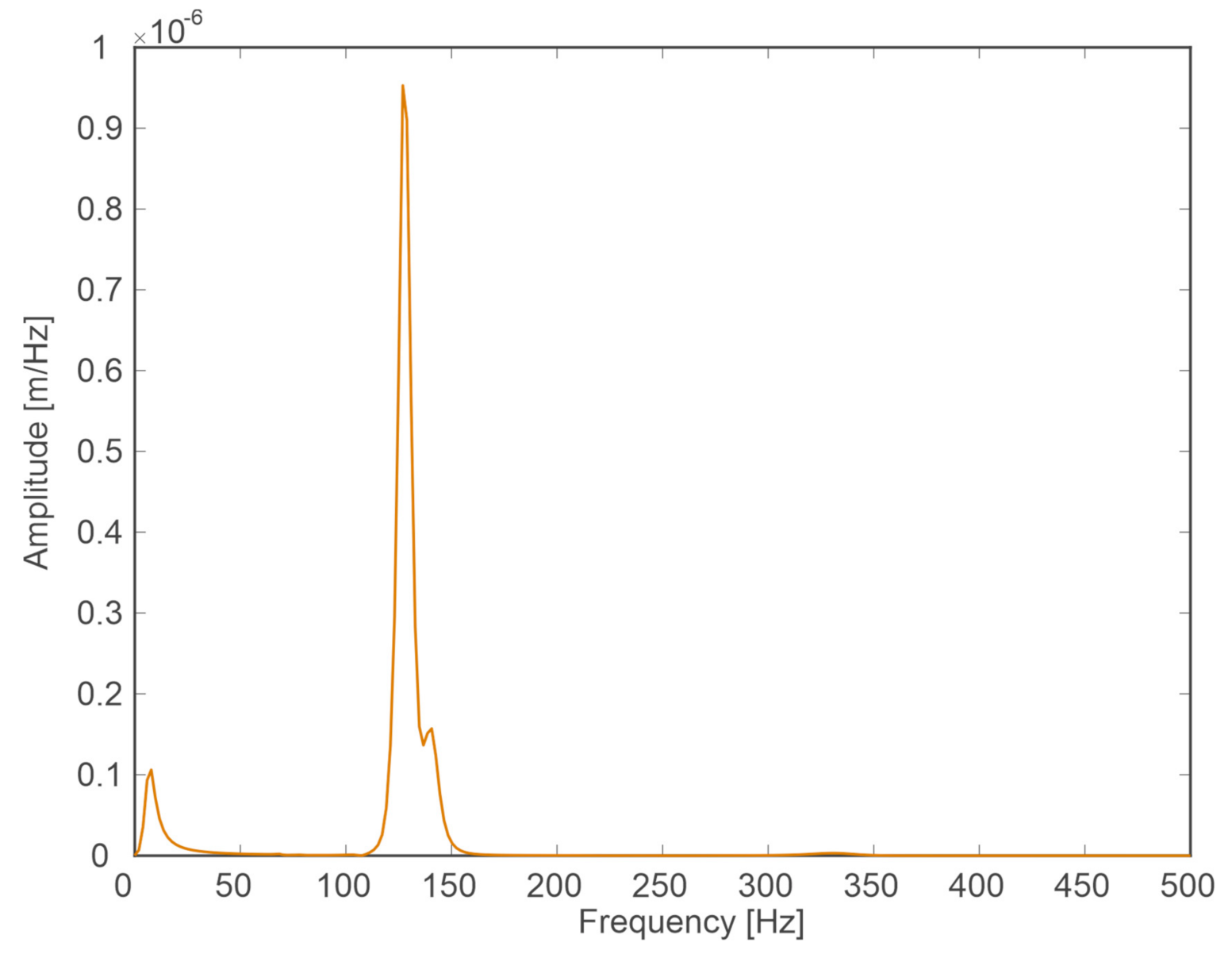
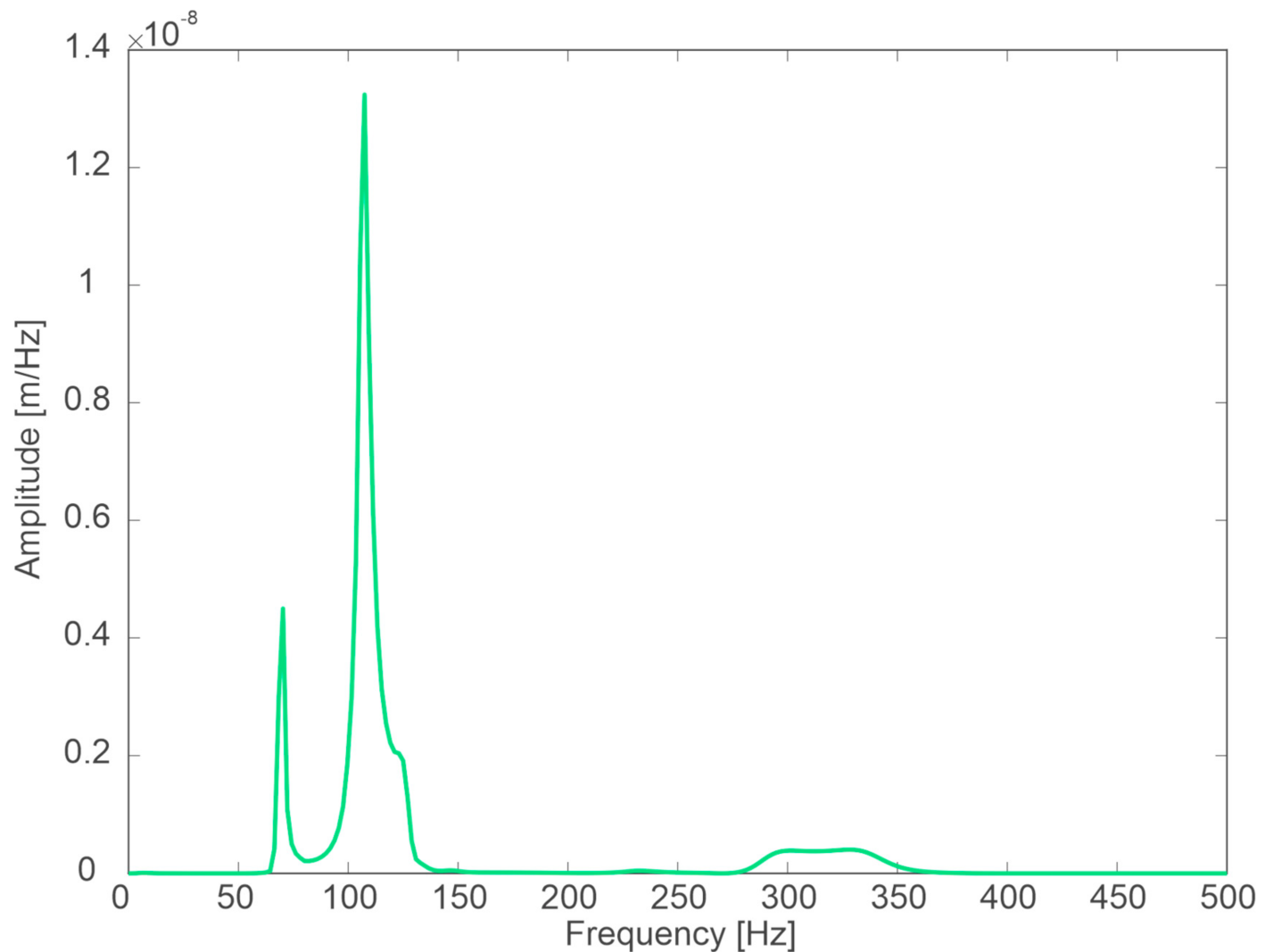
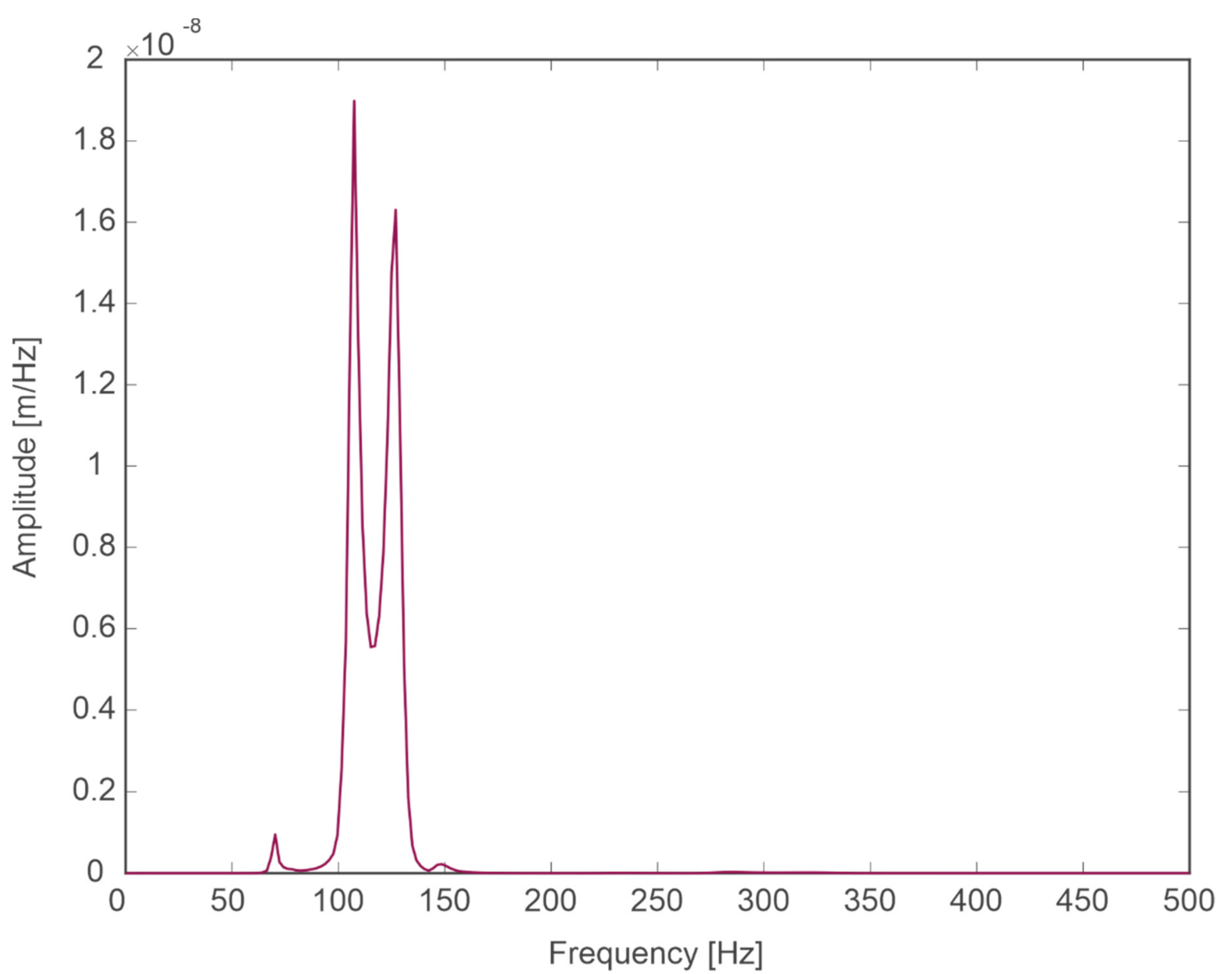
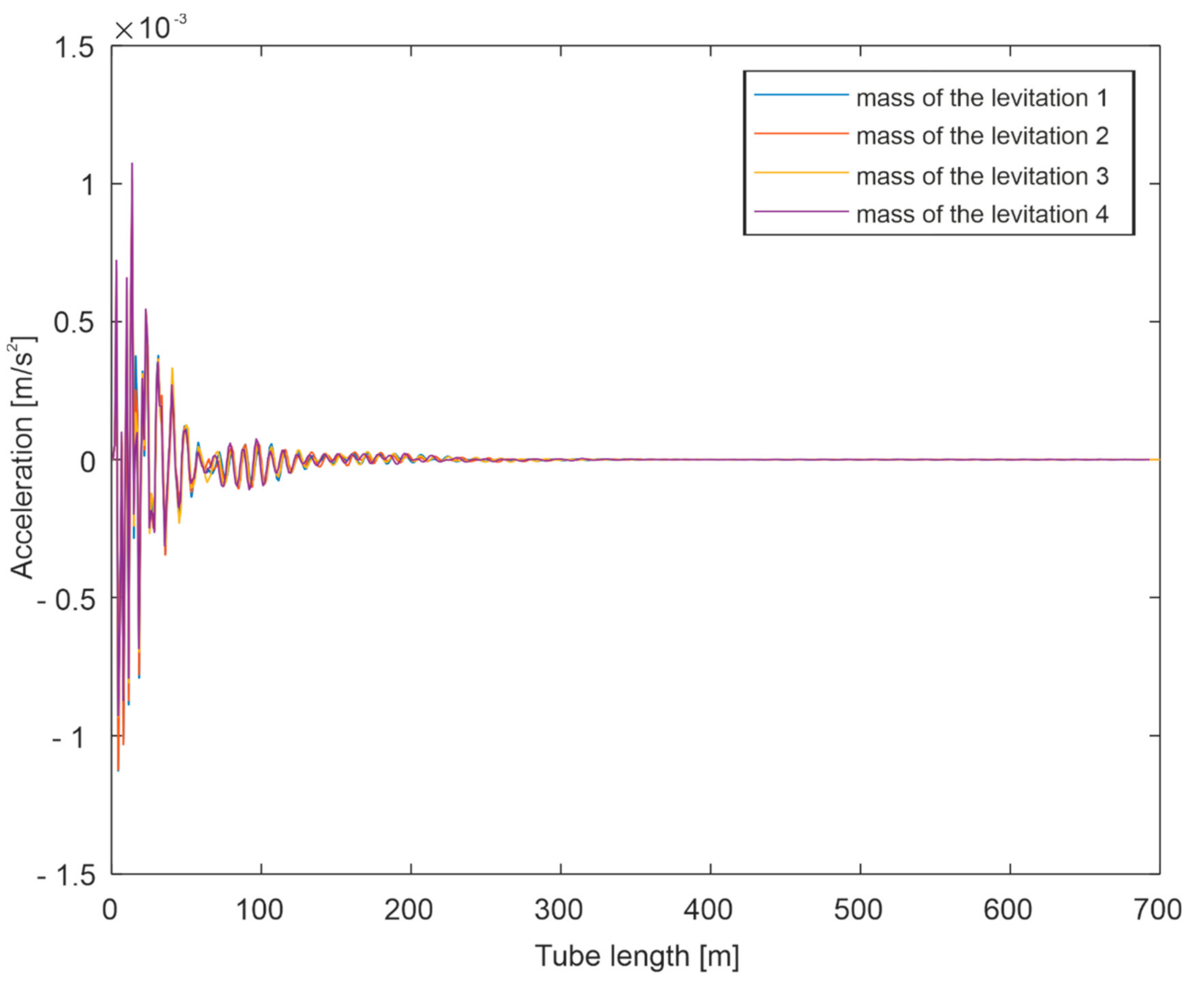
- Negligible influence of the slit width on the spectrum in the case of a change in capsule velocity and a clearly marked band of frequencies dominating in the signals (approximately 60–150 Hz).
- Clear influence of the substrate on which the guideway is located on the spectrum in the event of a change in the speed of the capsule.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Musk, E. Hyperloop Alpha; SpaceX: Hawthorne, CA, USA, 2013; Available online: https://www.spacex.com/sites/spacex/files/hyperloop_alpha-20130812.pdf (accessed on 24 August 2020).
- Braun, J.; Sousa, J.; Pekardan, C. Aerodynamic design and analysis of the Hyperloop. AIAA J. 2017, 55, 4053–4060. [Google Scholar] [CrossRef]
- Taylor, C.; Hyde, B.; Barr, L. Hyperloop Commercial Feasibility Analysis: High Level Overview; NASA: Cleveland, OH, USA, 2016. Available online: https://rosap.ntl.bts.gov/view/dot/12308/dot_12308_DS1.pdf (accessed on 24 August 2020).
- Zhang, Y. Numerical Simulation and Analysis of Aerodynamic Drag on a Subsonic Train in Evacuated Tube Transportation. J. Modern Transp. 2012, 20, 44–48. [Google Scholar] [CrossRef]
- Opgenoord, M.M.; Caplan, P. On the Aerodynamic Design of the Hyperloop Concept. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017; p. 3740. Available online: http://web.mit.edu/mopg/www/papers/OpgenoordCaplan_2017_Aerodynamics_Hyperloop_online.pdf (accessed on 24 August 2020).
- Kim, T.K.; Kim, K.H.; Kwon, H.B. Aerodynamic characteristics of a tube train. J. Wind Eng. Ind. Aerodyn. 2011, 99, 1187–1196. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, H.; Benedict, M.; Coleman, D. Aerodynamic simulation of high-speed capsule in the Hyperloop system. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017; p. 3741. [Google Scholar]
- Kisilowski, J. Dynamika Układu Mechanicznego Pojazd Szynowy—Tor; PWN: Warszawa, Poland, 1991. [Google Scholar]
- Kisilowski, J.; Kowalik, R. Numerical Testing of Switch Point Dynamics—A Curved Beam with a Variable Cross-Section. Materials 2020, 13, 701. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Deng, W.; Gong, P. Dynamics of the Bogie of Maglev Train with Distributed Magnetic Forces. Shock Vib. 2015, 2015, 896410. Available online: https://www.hindawi.com/journals/sv/2015/896410/#copyright (accessed on 14 December 2020).
- Chaidez, E.; Bhattacharyya, S.P.; Karpetis, A.N. Levitation Methods for Use in the Hyperloop High-Speed Transportation System. Energies 2019, 12, 4190. [Google Scholar] [CrossRef]
- Zhou, D.F.; Hansen, C.H.; Li, J. Application of least mean square algorithm to suppression of Maglev track-induced self excited vibration. J. Sound Vib. 2011, 330, 5791–5811. [Google Scholar] [CrossRef]
- Lee, J.S.; Kwon, S.D.; Kim, M.Y.; Yeo, I.H. A parametric study on the dynamics of urban transit Maglev vehicle running on flexible guideway bridges. J. Sound Vib. 2009, 328, 301–317. [Google Scholar] [CrossRef]
- Zheng, X.J.; Wu, J.J.; Zhou, Y.H. Numerical analysis on dynamic control of five-degree-of-freedom Maglev vehicle moving on flexible guideways. J. Sound Vib. 2000, 235, 43–61. [Google Scholar] [CrossRef]
- Hagele, N.; Dignath, F. Vertical dynamics of the maglev vehicle transrapid. Multibody Syst. Dyn. 2009, 21, 213–231. [Google Scholar] [CrossRef]
- Han, S.H.; Kim, Y.J.; Shin, B.C.; Kim, B.H. Simulation of Dynamic Interaction between Maglev and Guideway Using FEM; Maglev: Dresden, Germany, 2006. [Google Scholar]
- Kim, K.J.; Han, J.B.; Han, H.S.; Yang, S.J. Coupled vibration analysis of maglev vehicle-guideway while standing still or moving at low speeds. Veh. Syst. Dyn. 2015, 53, 587–601. [Google Scholar] [CrossRef]
- Post, R.F.; Ryutov, D.D. The Inductrack approach to magnetic levitation. IEEE Trans. Appl. Supercond. 2000, 10, 901–904. [Google Scholar] [CrossRef]
- Abdelrahman, A.S.; Sayeed, J.; Youssef, M.Z. Hyperloop Transportation System: Analysis, Design, Control, and Implementation. IEEE Trans. Ind. Electron. 2017, 65, 7427–7436. [Google Scholar] [CrossRef]
- Oh, J.S.; Kang, T.; Ham, S.; Lee, K.S.; Jang, Y.J.; Ryou, H.S.; Ryu, J. Numerical Analysis of Aerodynamic Characteristics of Hyperloop System. Energies 2019, 12, 518. [Google Scholar] [CrossRef]
- Zhao, C.F.; Zhai, W.M. Maglev vehicle/guideway vertical random response and ride quality. Veh. Syst. Dyn. 2002, 38, 185–210. [Google Scholar] [CrossRef]
- Kong, E.; Song, J.S.; Kang, B.B.; Na, S. Dynamic response and robust control of coupled maglev vehicle and guideway system. J. Sound Vib. 2011, 330, 6237–6253. [Google Scholar] [CrossRef]
- Maximov, S.; Gonzalez-Montañez, F.; Escarela-Perez, R.; Olivares-Galvan, J.C.; Ascencion-Mestiza, H. Analytical Analysis of Magnetic Levitation Systems with Harmonic Voltage Input. Actuators 2020, 9, 82. [Google Scholar] [CrossRef]
- Kisilowski, J.; Kowalik, R. The Vision System for Diagnostics of Railway Turnout Elements; Management Perspective for Transport Telematics; Springer: Berlin/Heidelberg, Germany, 2018; Volume 897. [Google Scholar]






























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Parameters | ||
|---|---|---|
| Length of vehicle | L | 25 m |
| Carriage mass | mv | 15,000 kg |
| Carriage body pitch inertia | Iv | 1.75 × 106 kgm2 |
| Total mass levitation frames | mm | 22,000 kg |
| Total primary stiffness | Kh | 1.18 × 108 N/m |
| Total secondary stiffness | Ks | 6.812 × 105 N/m |
| Total primary damping | Ch | 2.15 × 106 Ns/m |
| Total secondary damping | Cs | 8.46 × 104 Ns/m |
| Guideway Parameters | ||
|---|---|---|
| Length of guideway | l | 600 m |
| Guideway mass per unit length | mg | 3500 kg/m |
| Modulus of elasticity | E | 35.748 × l09 N/m2 |
| Moment of inertia | I | 0.543244 m4 |
| Damping coefficient | ξ | 0.6% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kisilowski, J.; Kowalik, R. Displacements of the Levitation Systems in the Vehicle Hyperloop. Energies 2020, 13, 6595. https://doi.org/10.3390/en13246595
Kisilowski J, Kowalik R. Displacements of the Levitation Systems in the Vehicle Hyperloop. Energies. 2020; 13(24):6595. https://doi.org/10.3390/en13246595
Chicago/Turabian StyleKisilowski, Jerzy, and Rafał Kowalik. 2020. "Displacements of the Levitation Systems in the Vehicle Hyperloop" Energies 13, no. 24: 6595. https://doi.org/10.3390/en13246595
APA StyleKisilowski, J., & Kowalik, R. (2020). Displacements of the Levitation Systems in the Vehicle Hyperloop. Energies, 13(24), 6595. https://doi.org/10.3390/en13246595