1. Introduction
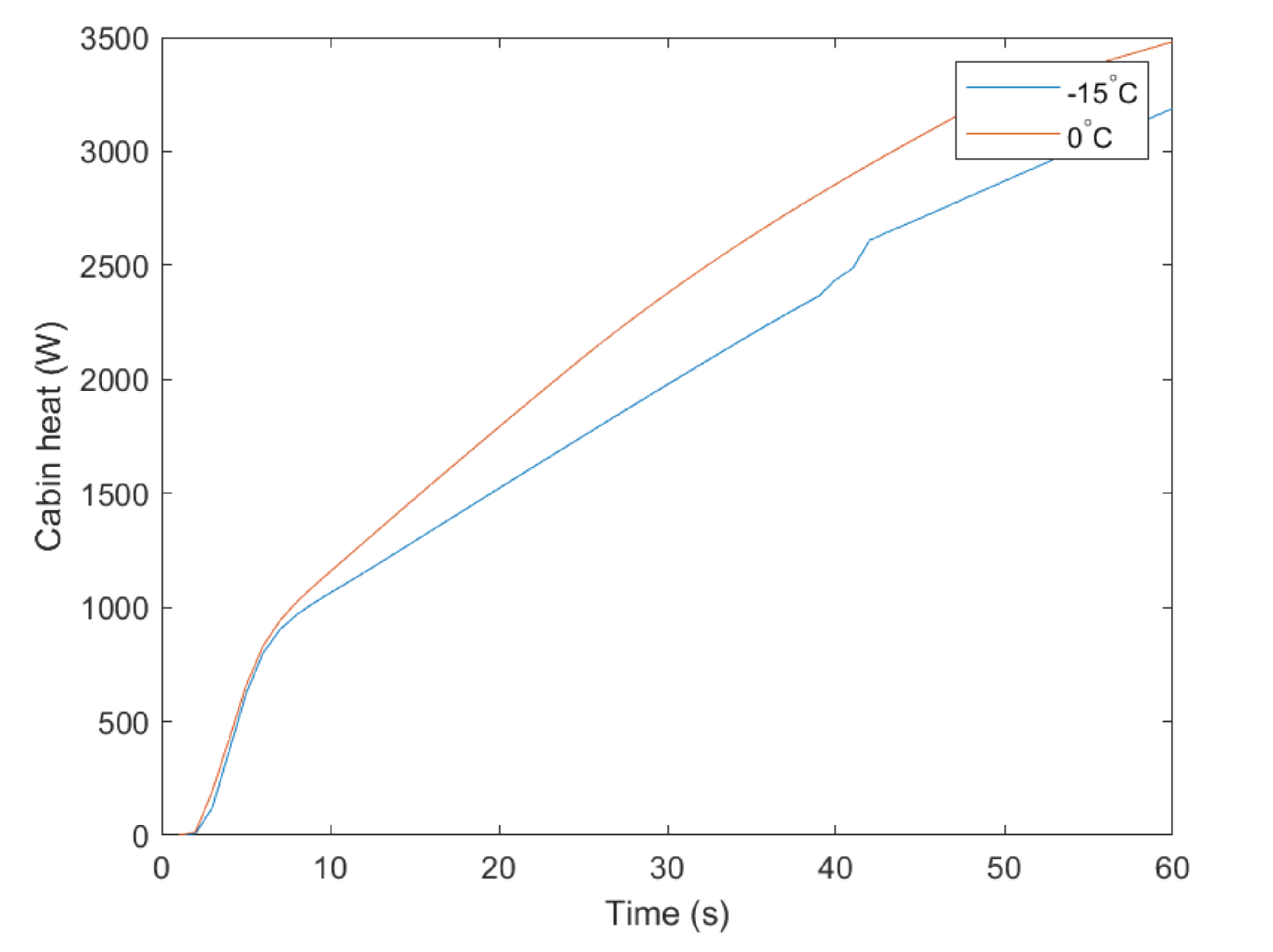
One potential barrier to the mass acceptance of electric vehicles (EVs) is range anxiety, which can be exacerbated at low ambient temperatures. Increased heating ventilation and air conditioning (HVAC) power consumption, coupled with reduced battery performance, leads to a range reduction of
to
at
C compared to
C [
1,
2]. In addressing this issue research has been focussed on the development of heat pump technologies as a more efficient mechanism to produce cabin heat [
3,
4,
5]. Other research introduces the use of the heat pump to provide heat to the battery, thereby minimising the impact of cold temperatures [
6,
7,
8,
9]. There is a requirement to heat the battery and the cabin in such a way that the battery performance and the driving comfort, respectively, can be ensured. The objective of this research is, therefore, to develop a methodology which can actively balance the needs of these two factors according to a quantitative cost function.
The necessity for controlling the balance between battery and cabin heating is reflected by a shift in manufactures’ focus toward optimised thermal management. For example, in Reference [
10], Bosch explains that their HVAC system is designed to provide heat to both the battery and cabin according to their requirements at low temperatures. In their system, this is achieved through two separate heating mechanisms. The cabin is heated via the heat pump, while the battery is heated via a positive thermal coefficient (PTC) heater and waste heat from the electric motor.
When operating in cold climates, up to
kW of heat can be required to heat the cabin [
11]. By comparison, assuming most EVs have an efficiency of between 144 Wh/km to 225 Wh/km [
12], then the equivalent average tractive effort on a World Harmonised Light Vehicle Test Procedure (WLTP) drive cycle would be
kW to
kW. In older electric vehicles, this heat was provided through PTC heaters with a maximum coefficient of performance of 1. In this case, the vehicle is capable of consuming as much energy through HVAC as through tractive effort. The increase in HVAC consumption is responsible for approximately
of the the range loss seen at low temperatures [
1]. The other
of range loss arises from lithium ion cell capacity loss with temperature.
Lithium ion cells have emerged as the dominant energy storage technology for electric vehicles [
13,
14]. Despite this, Lithium ion cells experience significant energetic and Coulombic capacity losses at low temperatures, which can hinder their usefulness in colder climates. Reduced lithium ion diffusivity in the carbon electrode inhibits charge carrier extraction leading to a loss in capacity [
15,
16,
17,
18].
Studies in this area have shown a Coulombic capacity loss of
to
at
C and
to
at
C [
16,
19,
20,
21,
22]. Poor diffusivity also leads to increased lithium density on the surface of the carbon electrode during charging events, which can result in lithium plating and the permanent loss of cycle-able material. These effects can be countered by deploying an efficient battery heating mechanism.
Low ambient temperatures can also lead to an increase in cell ageing and a reduction in power capability. In this study, neither of these effects have been considered. Cell ageing is accelerated when a cold battery is subjected to fast charging [
23]; in this study, only the discharge of a cell is considered through a drive cycle. Power capability reduction caused by low ambient temperatures can cause the battery terminal voltage to drop below the minimum when high currents are drawn from the battery. Since most drive cycles are mild in terms of their current usage, this is unlikely to be a problem. This point has been demonstrated by Saxena et al., who showed that most EVs could withstand a 70% reduction in power, while still being able to complete regulation drive cycles [
24].
The power requirement for cabin heating has reduced significantly with the advent of heat pumps. For example, Meyer et al. presented research on a vehicle in which HVAC consumption reduced by an approximate average of
, in the temperature range of
C to
C, when using a heat pump compared to conventional PTC heating [
3]. The area of heat pump research has flourished with the rise of electric vehicles. The primary appeal of the heat pump is its ability to upgrade waste heat from around the vehicle and make it useful for cabin heating. Through the use of waste heat, the heat pump is able to operate at a much high coefficient of performance (COP) than a PTC heater [
4,
25]. Along with the opportunity to use waste heat from multiple components of the vehicle came the question of which components could heat be extracted from. Ahn et al. demonstrated a heat pump system which could use waste heat from the vehicle’s motor, leading to a COP of between 3.2 and 3.4 [
4]. In Ahn’s research, multiple levels of heat delivered from the motor were considered; however, these levels did not change dynamically through the drive cycle. Steiner et al. [
5] investigated the benefits of using a heat pump to extract heat from a pre-heated battery; while this resulted in a 48% reduction in HVAC energy consumption, it is not preferable as the increased battery storage temperature may have adverse effects on battery ageing [
26]. Leighton et al. proposed and demonstrated a heat pump system which was able to heat the battery and improved low temperature range by between
and
[
6]. Like Ahn’s work, Leighton only considered the system operating in a fixed state throughout a drive cycle. Jeffs et al. demonstrated a methodology for comparing multiple operational modes in which 4 optional heat sources were considered and battery heating was considered as an optional heat sink [
8]. Here, Jeffs showed that, under some conditions, heating the battery is preferable, but they only considered battery heating at the start of the cycle and did not consider whether further benefit could be gained by dynamically optimising the heating of the battery.
Authors have shown that it can be beneficial to heat the electric battery using a heat pump in cold conditions. However, so far, this has only been considered as a binary interaction, i.e., the battery is either heated or it is not. It is, therefore, important to investigate what further benefits can be gained through considering the thermal connection between the heat pump and battery dynamically. This should be done while also considering the impact that battery heating will have on cabin comfort and, therefore, developing a method for balancing the needs of the cabin and the battery. Using the battery as a heat sink will increase the batteries temperature, reducing the low temperature performance deficit, but it also reduces the amount of heat that can be delivered to the cabin. To heat both the cabin and the battery, one heat source needs to be split among two sinks. There is, therefore, a trade off between range (which is improved by heating the battery) and comfort (which is reduced by heating the battery), which needs to be considered. Contextually, this problem can be likened to that of the power split problem in hybrid vehicles. In this area of research, dynamic programming (DP) is considered to be the benchmark of what is potentially achievable for a system and is able to find the global minima in control optimisation problems [
27,
28].
DP is a method of generating optimised control trajectories for dynamic problems. A dynamic model is used to generate a cost matrix which describes the cost of an action given a control choice and a given vehicle state. An optimisation algorithm is then used to find a series of control options which leads to the minimum cost through the dynamic problem. The advantage of this method is that having full knowledge of the consequence of every control option at every time step allows for the absolute optimum control trajectory to be found. The disadvantage of this method is that it is rarely implementable in its pure form, since full knowledge of the duty cycle is required beforehand, and found optimal trajectories are only applicable to specific scenarios. It is, therefore, regarded as the best case scenario which implementable strategies aim to meet [
29].
Other optimised control strategies, such as heuristic control techniques and static optimisation, are more implementable than DP but are sub-optimal in comparison [
30]. For example, Wang et al. showed that DP could reduce the fuel costs of a Toyota Prius by
, but, when a heuristic controller was created to mimic the DP results, the improvement reduced to
[
29].
The remainder of the paper is structured as follows:
Section 2 describes the vehicle model used to conduct the research,
Section 3 describes how the vehicle performance will be measured,
Section 4 describes how the model is validated,
Section 5 explains how a specific DP algorithm was implemented, and
Section 5.2 defines the cost function that describes the balance between range and comfort;
Section 6.3 and
Section 6.4 show the results of implementing the DP method and the optimal control trajectories produced, and
Section 6.5 describes a potential route to the actual implementation of the results presented. A review of the method used with suggestions of improvements is made in
Section 7, and, finally,
Section 8 summarises the progress made through this research.
2. Vehicle and Thermal Model
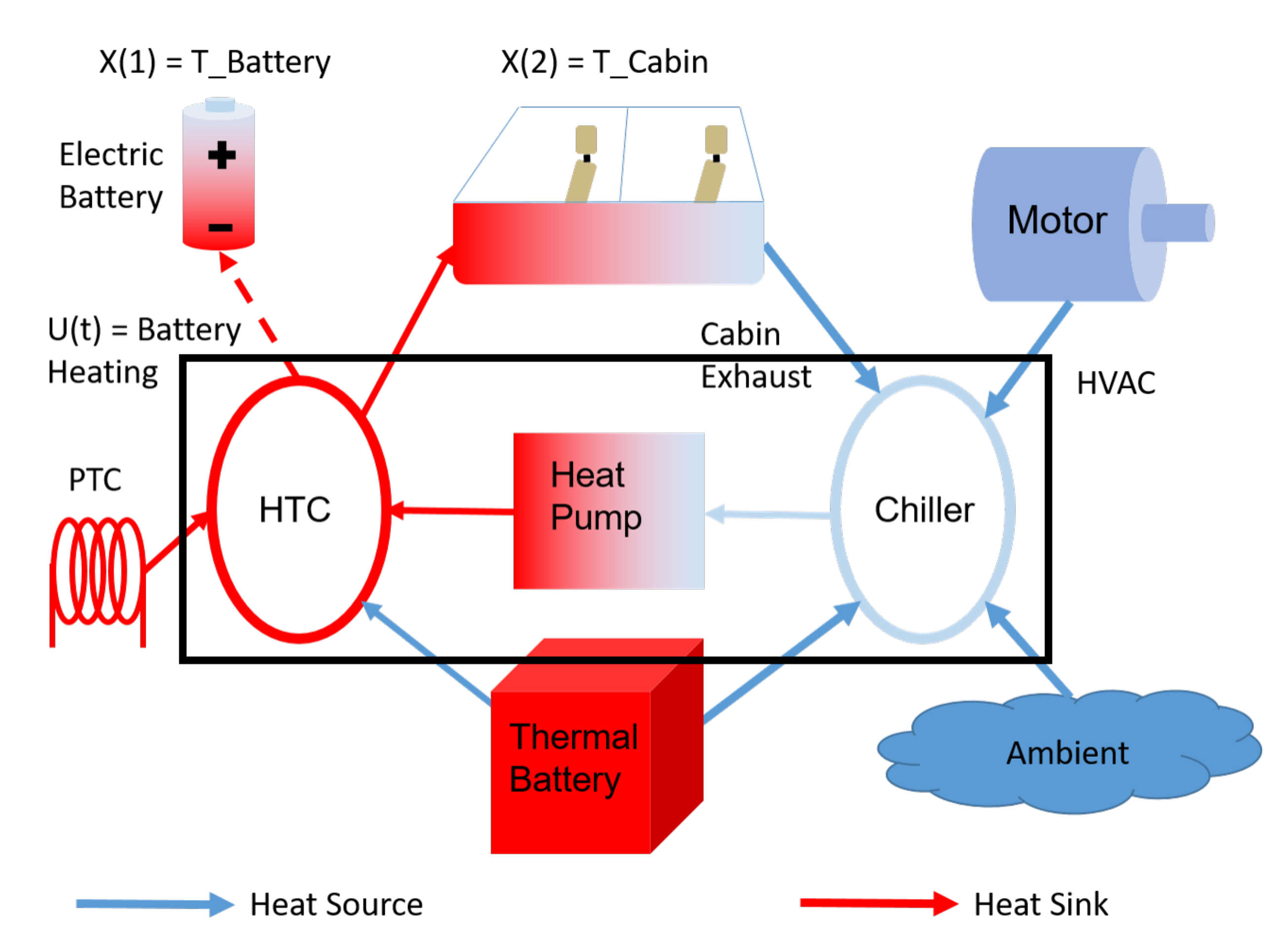
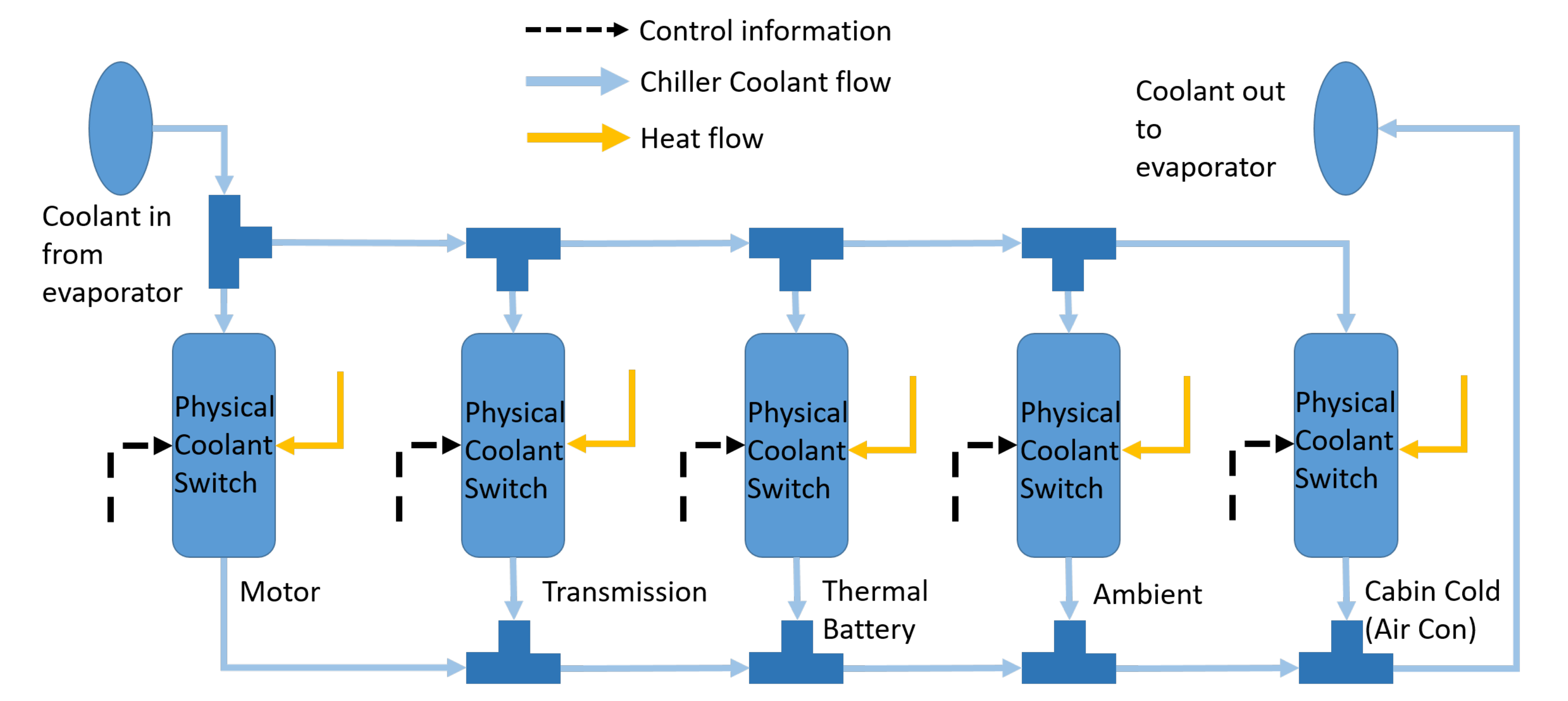
The architecture of the heat pump system can be seen in
Figure 1. Here, the interactions between vehicle components and the heat pump are shown. The connection between the battery and heat pump is identified with a dashed line as it is the connection which will be optimised through dynamic programming. If the battery raises above its target temperature of
C, then the vehicle controller will cease heating of the battery.
Figure 1 shows a PTC heater which is required to support the heat pump in extremely low temperatures and during the warm up phase [
31]. In extremely cold temperatures, the heat pump is not able to extract heat from ambient, so its heat output is reduced; in these conditions, the PTC heater is required to meet the heating load. Additionally, Kim et al. showed that a PTC heater is required during the warm up phase of the heat pump to provide adequate cabin heating [
31]. Here, the PTC is controlled to supply 4 kW of heat from the beginning of the cycle until the cabin reaches its target temperature, or the high temperature coolant (HTC) circuit, which provides heat to the battery and the cabin, reaches its target temperature of
C.
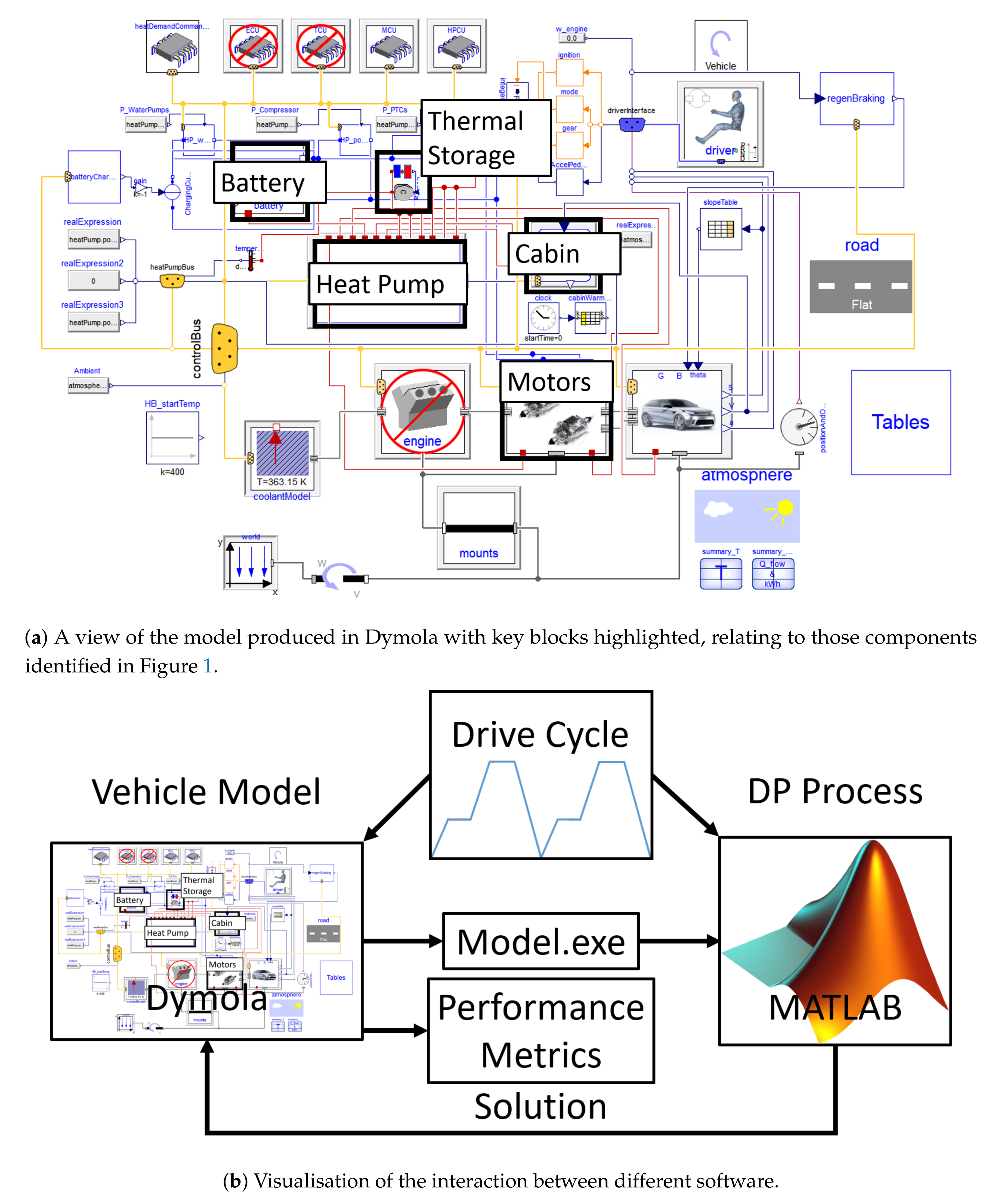
A vehicle model built in Dymola (Version 2019, Claytex ltd Libraries, Leamington Spa, UK) has been used to evaluate, develop, and optimise a battery thermal management control which balances comfort and range through the application of DP. The vehicle model is a hypothetical EV, which has parameters defined in
Table 1. The model utilises a physical heat pump model, which uses waste heat from the motor and cabin exhaust. The system also collects heat from ambient and is further supported by a thermal storage system. This is in agreement with the results presented in Jeffs et al. concerning the most useful components to be used with a heat pump [
8]. The models for the heat pump, battery, cabin, motor, and thermal storage will be explained in the remainder of this section. Full and further details of the model can be found in Reference [
8,
32]. Should the reader be further interested in the model, the libraries used are available from Claytex Ltd.
2.1. Heat Pump
The heat pump is able to extract heat from multiple sources around the vehicle, as shown in Reference [
8,
32]. Parameters relating to the heat pump’s operation can be found in
Table 2.
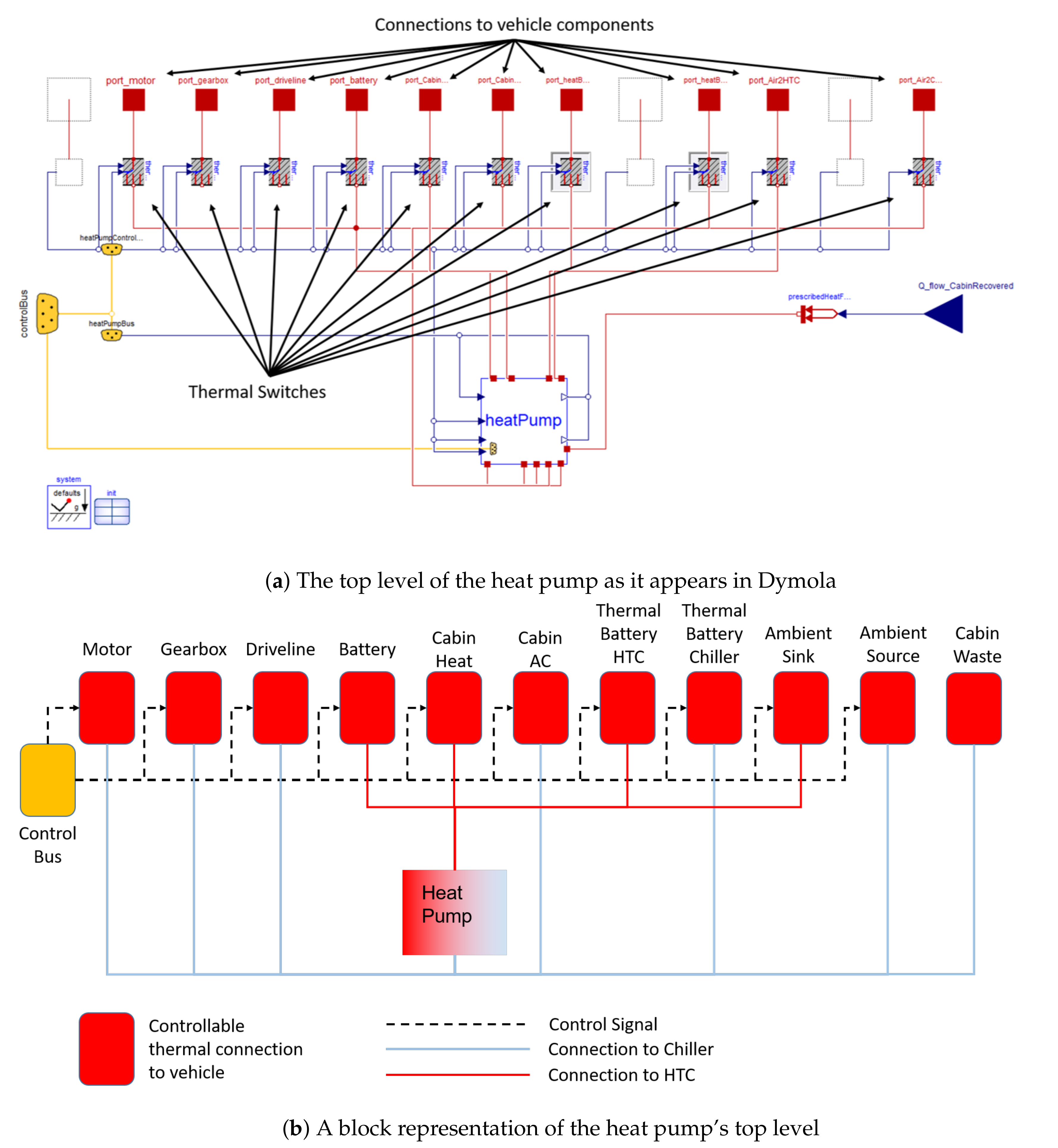
For the purposes of this work, focus is given to the connection between the heat pump and the battery. The top level of the heat pump is shown in
Figure 2, and this corresponds to the box labelled HVAC in
Figure 1.
Figure 2a shows the model as it appears in Dymola, while
Figure 2b gives a block representation of the
Figure 2. Here, the thermal switch for the battery is used to isolate the battery from the heat pump when the battery has reached its target temperature of
C. When the battery is being heated, the heat flow is controlled by a dynamic thermal resistor inside the thermal switch, allowing the user to set a desired heat flow. In a physical vehicle, this would be controlled by the temperature of coolant sent to the battery and its mass flow rate. Here, dynamic thermal resistors are used to simplify the interaction while maintaining the functionality. The heat flow for the battery is set inside a heat pump control unit (HPCU), external to the heat pump model, which is described in
Section 2.2.
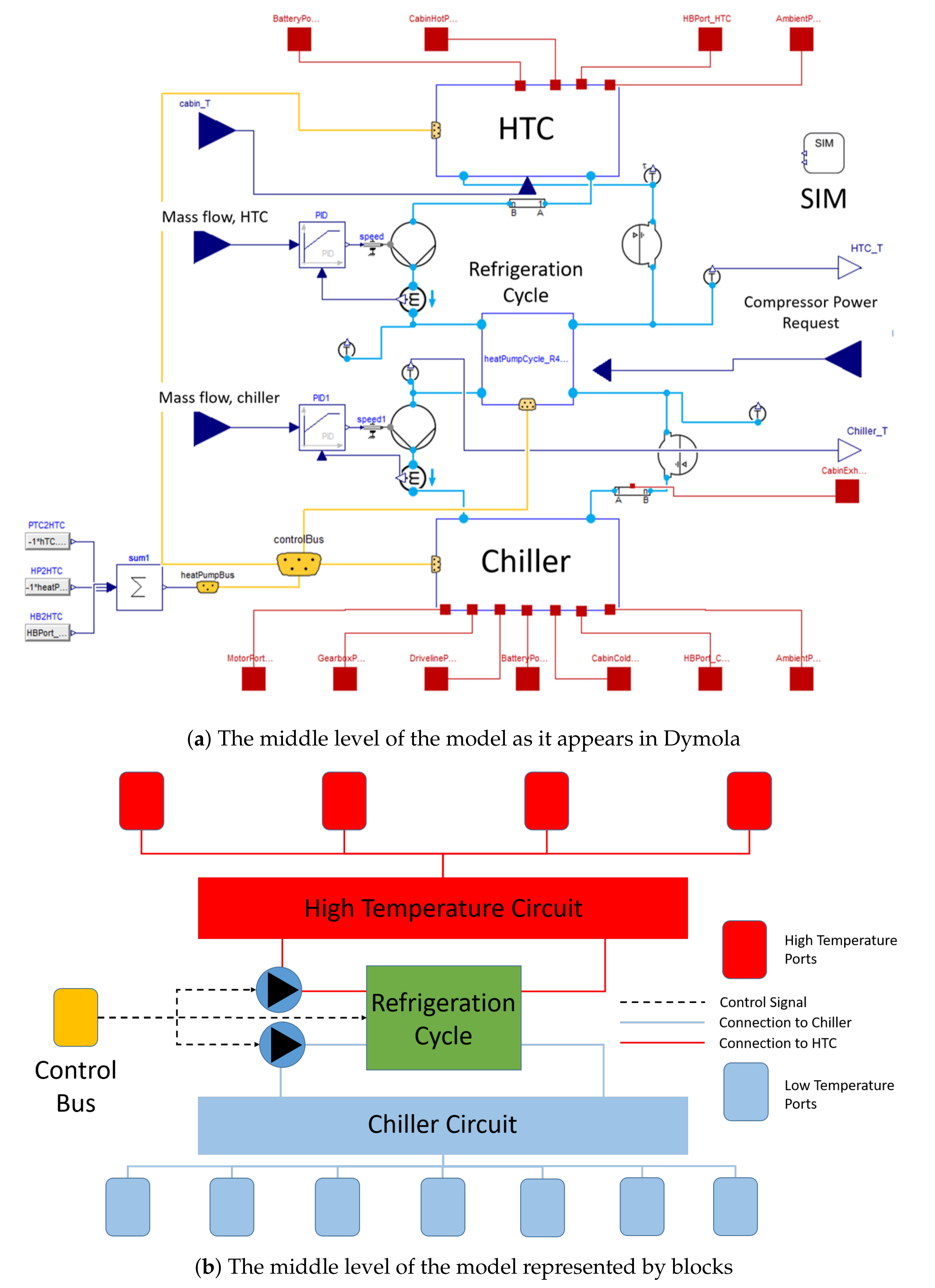
Inside the block labelled “Heat Pump” in
Figure 2b is the middle layer of the heat pump seen in
Figure 3. The middle level of the heat pump model is used to house, pump coolant between, and direct heat flows to the 3 main models of the heat pump. These are the HTC, chiller circuit, and refrigeration loop. Inputs to this level include coolant mass flow rate (which is then controlled by a pump and a proportional integral derivative (PID) controller), compressor power demand which is passed onto the refrigerant model, and cabin temperature which is used to shut off the PTC heater, which is located in the HTC. The coolant circuits themselves contain heat exchangers (HXs) which have been sized using examples and estimates taken from components found on existing vehicles. This level also sees the input of heat recuperated from cabin exhaust, which is used to increase the temperature of the chiller loop.
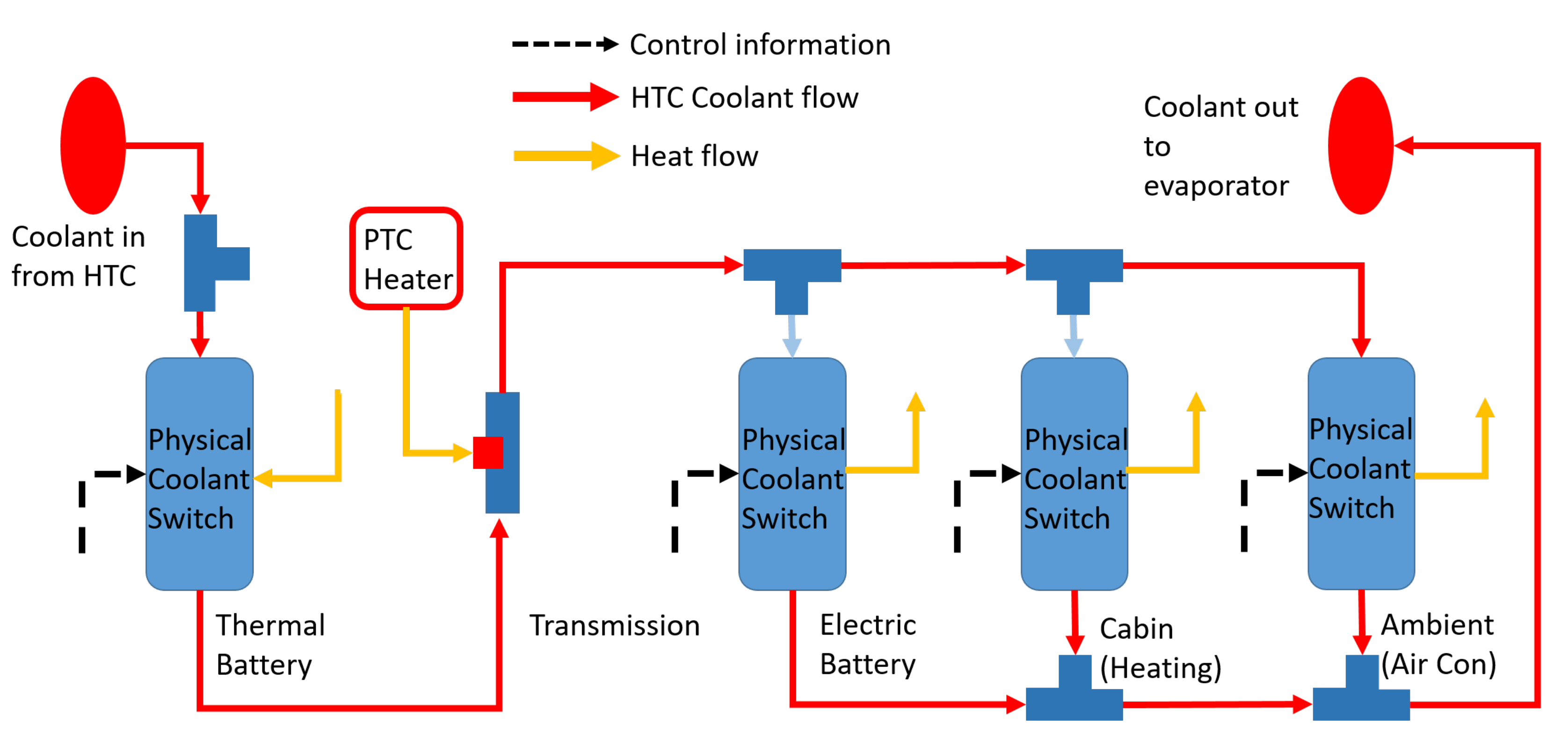
The coolant circuits, HTC, and chiller are shown in
Figure 4 and
Figure 5, respectively. They have operating temperatures of
C and
C, respectively. In
Figure 4, the thermal battery and PTC heater are in series before the coolant reaches the cabin, battery, and ambient, which are in parallel. It can also be seen that all components with the exception of the PTC heater have a bypass option; this is the second control point for component connections which can be used to thermally isolate a component from the system. This arrangement was chosen so that the thermal battery could be used to increase the coolant temperature from the condenser output and under certain conditions negate the need for the PTC heater, which is set to turn off if the coolant temperature exceeds
C. The hot coolant is then split between the battery and the cabin; hence, when battery heating is operational, the cabin receives less mass flow through its HX. Additionally, as the battery heating is increased, the coolant outlet temperature will be lower, increasing the demand on the heat pump, or further reducing cabin heat when the compressor and PTC loads are saturated.
The chiller circuit is arranged in a similar way to the HTC, as seen in
Figure 5, with the components capable of contributing heat to the system in parallel. These HXs allow heat to be extracted from; the motor and inverter (as one unit), the gearbox and driveline (which will be treated as one component and refereed to as transmission), the battery, the thermal battery, and ambient. For the purposes of this research, the transmission and battery are not used as heat sources. Battery cooling is implementable through chiller in case of excessive battery temperatures which are not seen in the scenarios tested here. The chiller circuit also uses bypasses to thermally isolate components from the heat pump.
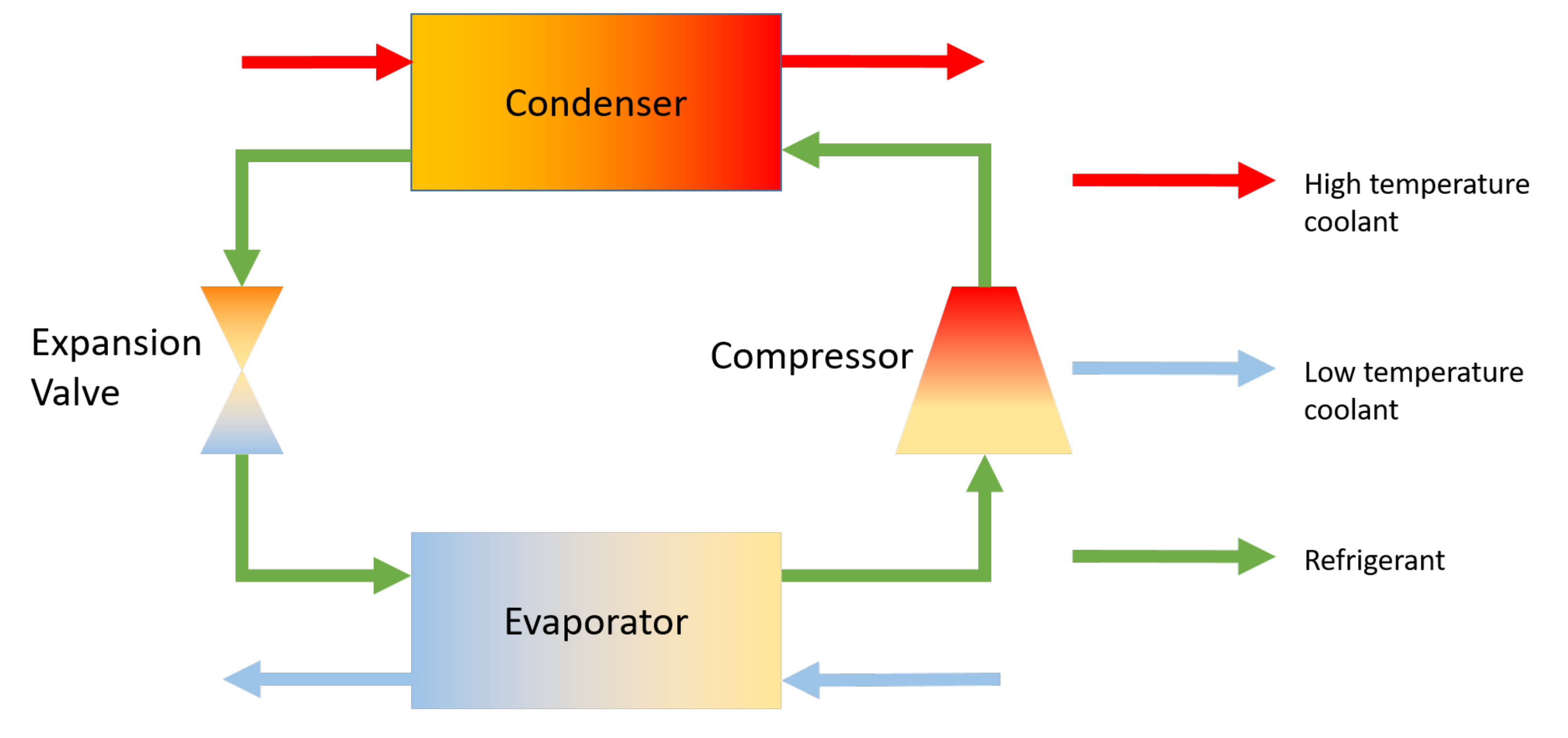
The bottom level of the heat pump contains the physical model of the refrigerant circuit. For this research, R134a is used as the refrigerant. The configuration of the refrigeration circuit is typical of what may be found in literature [
4,
6]. The refrigeration cycle uses refrigerant to coolant HXs (opposed to more traditional refrigerant to air HXs) to distribute and collect heat to/from the vehicle. The coolant system is limited by the melting and boiling points of the coolant; it is, therefore, important that the compressor is carefully controlled to prevent the coolant from freezing or boiling. The coolant is prevented from going beyond its temperature limits using the HPCU, which controls the compressor demand seen on the right of
Figure 6. The refrigerant is protected from exceeding its pressure limit by the PID labelled “Pressure Control PID”, seen in
Figure 6, which is set to limit the pressure to 30 bar; chosen corresponding to R134a’s pressure-enthalpy diagram. Since there are two power demands at this level, the demand according to the pressure controller and the demand input from the HPCU, the minimum of these values is used to control the compressor, ensuring that neither refrigerant pressure nor coolant temperature exceed their physical limits.
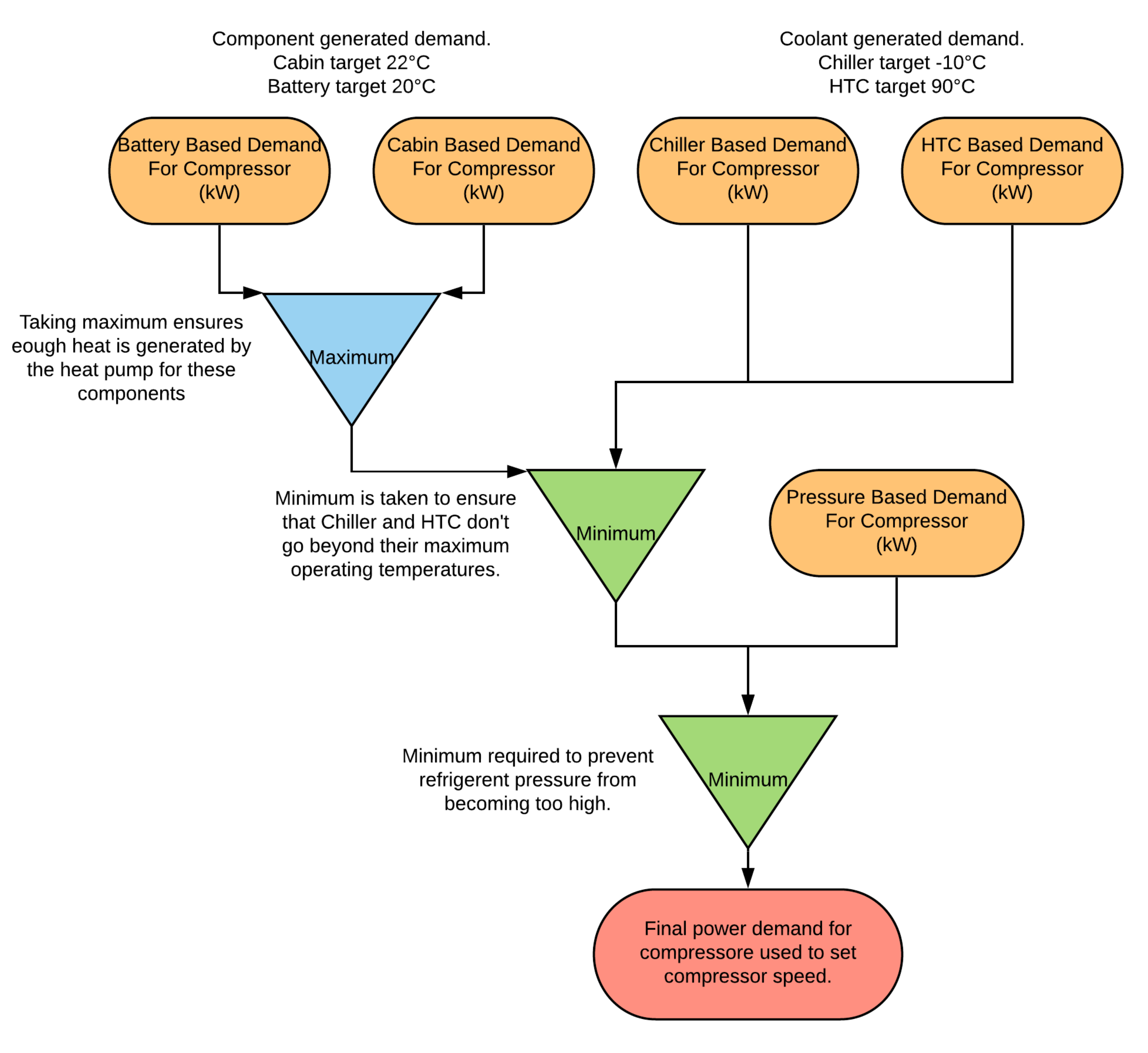
2.2. Heat Pump Control Unit (HPCU)
The heat pump control unit has two primary purposes: firstly, to set the desired amount of battery heating, which will be implemented using a heating schedule generated through the results of dynamic programming; and secondly, to set the desired power output of the heat pump compressor. The compressor controller, shown schematically in
Figure 7, has the purpose of getting the cabin and battery to temperature, while ensuring that the HTC and chiller do not exceed their temperature limits. PID controllers are used to create a compressor power demand according to the battery and cabin current and target temperatures, and the greatest of these demands is taken to ensure there is enough heat to meet these requirements. Additionally, PID controllers are used to set a power demand needed to bring the chiller and HTC loops to their target temperatures. The minimum power request (from either the cabin and battery, the chiller, or the HTC controls) is then passed to the compressor; the minimum is used so that, if a component has reached its set point, it is not pushed beyond that target by the requirements of another component. This logic prevents the battery and cabin from overheating and reduces the chance of the model failing due to the coolant breaching its temperature limits.
2.3. Battery
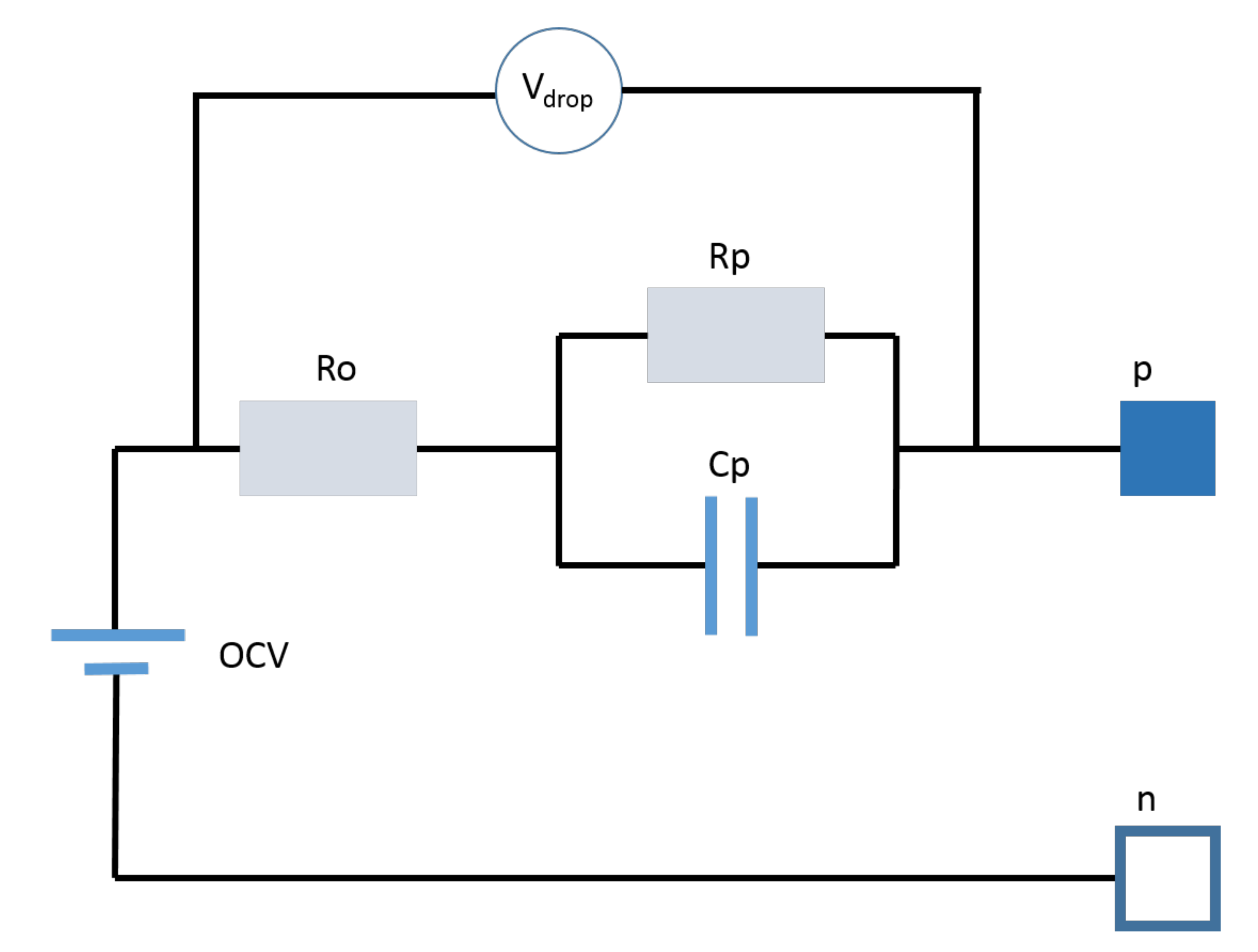
The battery model can be broken into two parts: electric and thermal. The electric side uses a first order RC (resistor-capacitor) network equivalent circuit model (ECM), as seen in
Figure 8. The components in this model are parameterised using look up tables which are a function of component temperature, as measured using the thermal model, and the cell’s state of charge (SOC). The resistor and open circuit voltage (OCV) values are scaled by the number of cells in series to produce an RC circuit which represents one string of the pack. This data was generated specifically for Xalt 40Ah cells by Tripathy et al. in Reference [
33]. This type of battery model is typically seen in literature [
34,
35] when modelling pack size batteries for vehicle application. In this application, the vehicle was configured in a 3p108s (3 parallel strings of 108 cells in series) arrangement giving a pack size of approximately 48 kWh (assuming a nominal voltage of
V).
Since the parameters of the RC network are dependent on temperature, a thermal model is used to estimate the bulk temperature of the pack. The waste heat is calculated using Equation (
1).
Here,
is the waste heat generated by the battery,
I is the battery current, and
and
are internal resistances corresponding to
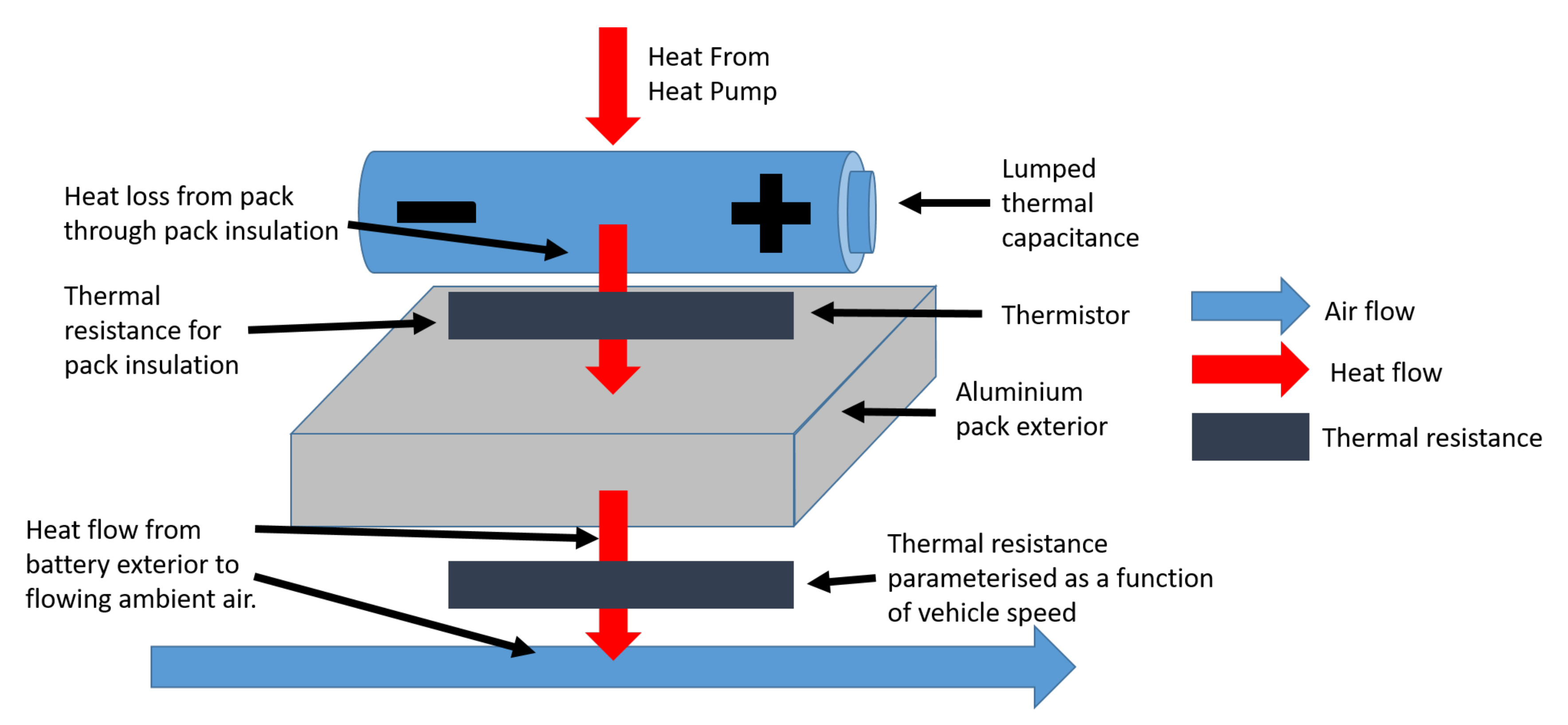
Figure 8 which are dependant on battery temperature and state of charge. A schematic representation of the thermal model of the battery can be seen in
Figure 9. The battery has two modes of heat exchange: interaction with the thermal management system and thermal losses to ambient. The latter heat exchange is modelled using the flat plate parallel flow equation [
36], given in Equation (
2).
where
is the mean heat exchange coefficient of the plate, and
k,
, and
are the thermal conductivity, Reynolds number, and Prandtl number of the convection fluid. The Reynolds number and Prandtl number are defined in Equations (
3) and (
4). L is the length of the surface over which the fluid is flowing, Here,
is used as an approximation of the length of the underside of the vehicle.
where
,
v,
, and
are density, velocity, dynamic viscosity, and specific heat capacity of convective fluid—in this case, air. The final heat flow to ambient is then given by
or
where
is the heat rejected to ambient,
G is the thermal conductance of the plate,
W,
L are the width and length of the plate, and
defines the temperature difference between the plate and ambient.
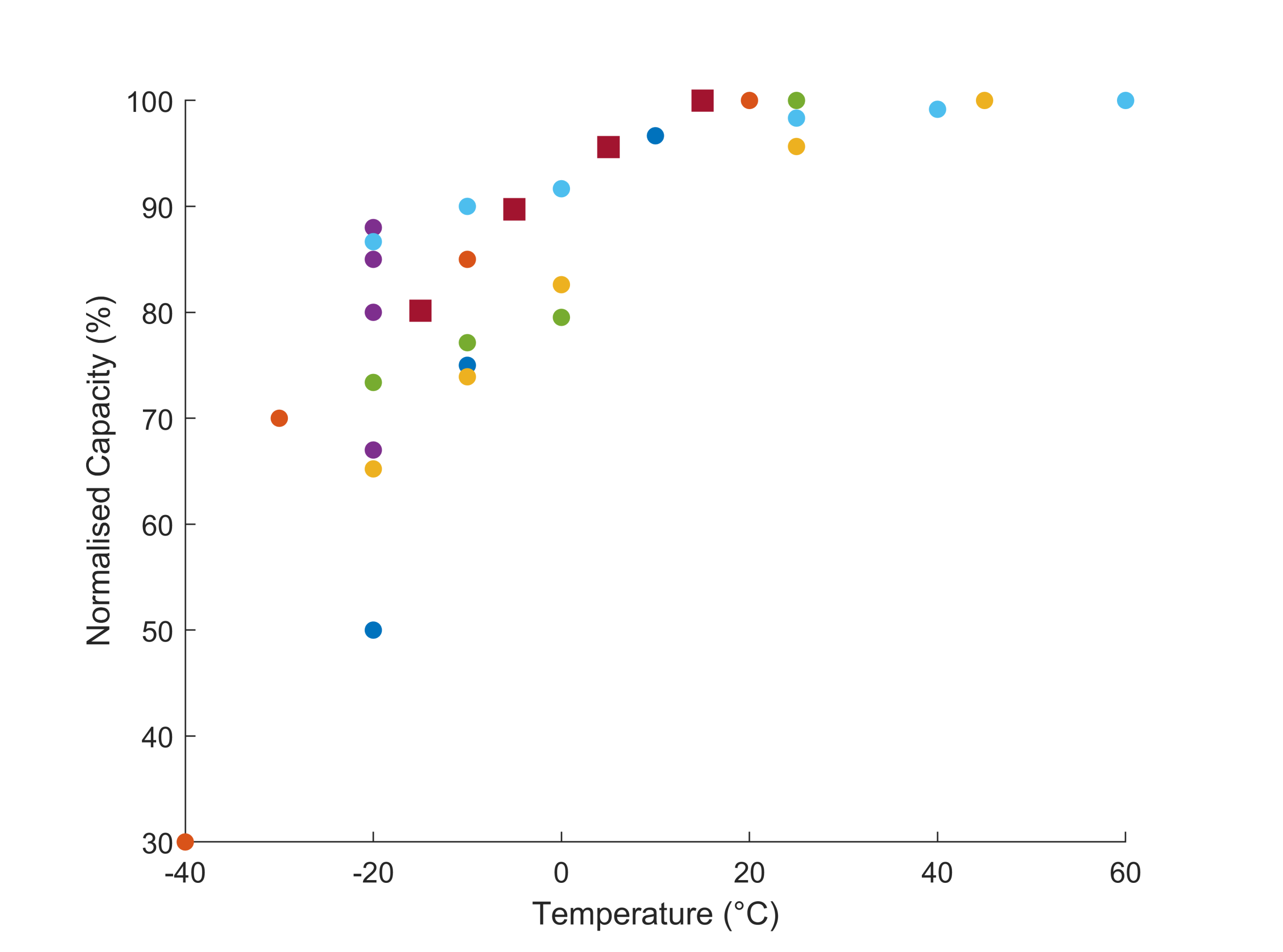
It should be noted from literature that the capacity of a battery is dependent on its temperature; in research concerning the operation of electric vehicles in low temperatures, this should be accounted for. A state of charge model is used to estimate the state of charge of the battery through the drive cycle as a function of temperature. To achieve this, the state of charge model has an additional lookup table which contains information about the proportion of capacity available as a function of temperature. This is then used to scale the Coulomb counting equation by the factor
seen in Equation (
7). This adjustment has been seen to improve the accuracy of SOC tracking and range prediction at low temperatures and so is an important addition to this work [
33,
37,
38].
Table 3 shows the values of
as a function of temperature.
2.4. Motor
Motor waste heat is modelled using an efficiency lookup table. The motor’s thermal model consists of a lumped thermal capacitance representing the motor windings, which the heat is generated and extracted from. The heat pump aims to extract 1 kW of heat from the motor, and the motor is also able to lose heat to ambient through a fixed thermal resistance.
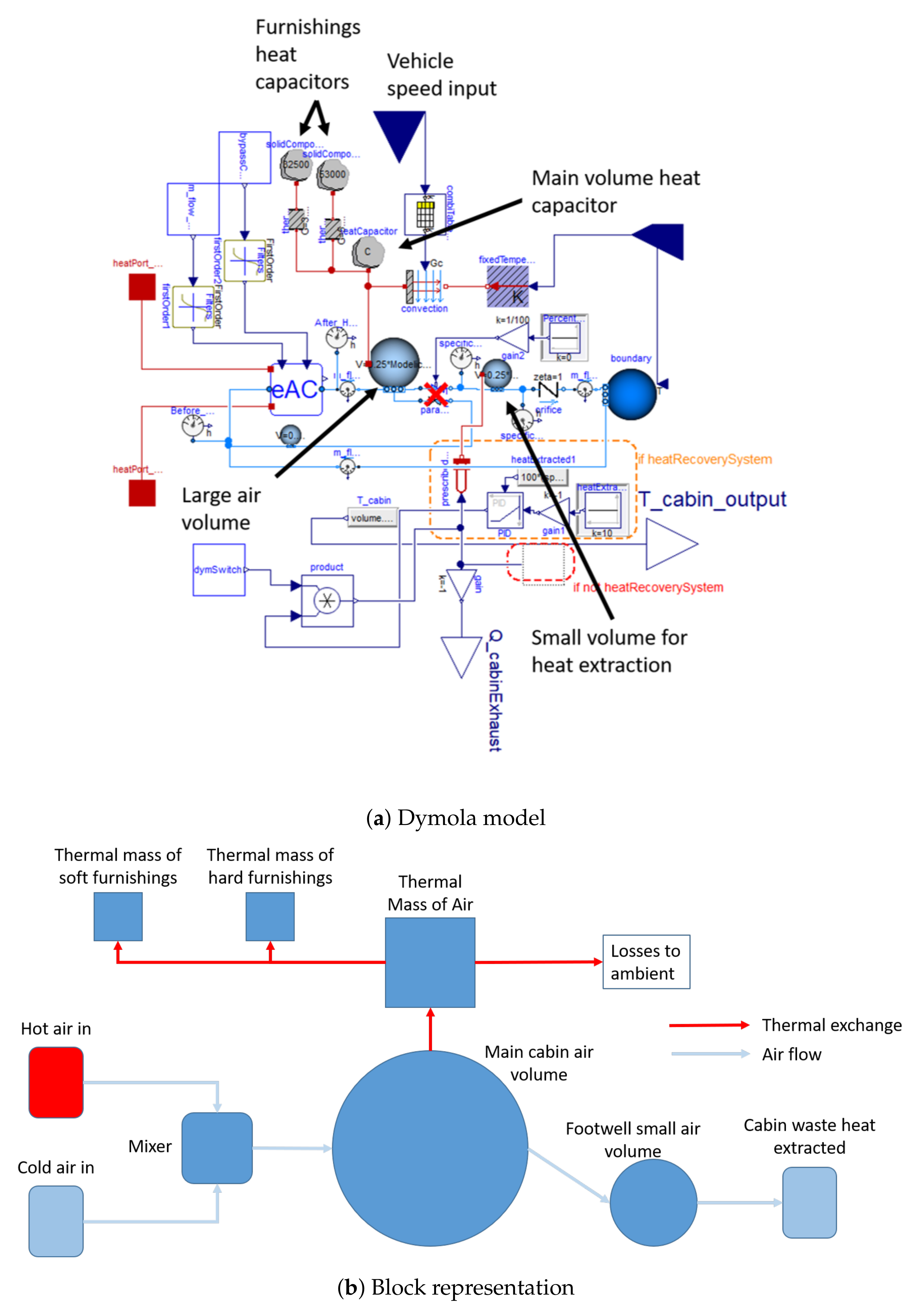
2.5. Cabin
The cabin has a target temperature of
C, which is measured at the “Large air volume” seen in
Figure 10a. An infinite air source with ambient temperature is used as the air source for the cabin, where air into the cabin is heated in the “eAC” component, seen in
Figure 10. The heated air is then pumped into the cabin, where a single air volume and heat capacitance are used to measure the cabin temperature. This heat capacitor has four modes of losing heat: convection to ambient through panels, thermal exchange with soft furnishings, thermal exchange with hard furnishings, and cabin air exhaust. The convection to ambient through the exterior surfaces is modelled using a variable thermal conductance with dependency on vehicle speed through a lookup table [
40]. The model uses three heat capacitances: one for air, one for hard furnishings (such as dashboard panels, glass, etc.), and one for soft furnishings (such as the seats, carpet, etc.), with thermal resistances between the air and the furnishings. Finally, there are two volumes representing the air in the cabin: one large and one small. The larger air volume represents the majority of the cabin where the target temperature is imposed. The smaller air volume is used to harvest cabin exhaust waste heat, Here, 30% of the potential heat contained in the wasted air can be extracted and used in the heat pump. This amount reflects the claims made by BMW in Reference [
41].
2.6. Thermal Storage
The thermal storage block utilises a phase change material (PCM) to store heat which can be redeployed instantly when the vehicle begins its journey. The material modelled is called paraffin 70-75, and its characteristics were found by Ukrainczy et al. [
42] and are shown in
Table 4.
The PCM is modelled using a thermal capacitor block with dynamic capacitance, allowing for the modelling of the latent heat release of the material. When the material temperature drops to
the capacitance is increased from
to
, then when the temperature falls beneath
the capacitance is restored to
. This approach for modelling PCMs has been used in other similar research [
8,
32,
43].
5. Dynamic Programming
When considering control optimisation, it is relevant to consider solutions for the power split problem in hybrid electric vehicles, which is conceptually similar to the heating split problem here. Cook et al. [
30] performed a review of difference control techniques used for controlling the power split between the internal combustion engine and motor in hybrid electric vehicles. Cook considered heuristic or rule based controllers, steady state optimised control, and dynamic programming and highlighted that dynamic programming was the only method which could reliably find a global minimum. Cook et al. demonstrated this by showing that a controller based on dynamic programming results was able to reduce the fuel consumption of a hybrid vehicle by 54% compared to a 31% reduction using a rule based controller [
30]. The Equivalent Consumption Minimisation Strategy (ECMS) is also a strategy considered, which calculates power split based on a simplified model to minimise the instantaneous fuel consumption based on current demand. This method is suboptimal as it is unable to account for the future state of the battery and future requirements [
46,
47,
48].
DP has been used liberally in hybrid vehicles to optimise the power split between the internal combustion engine and electric motor but has not been used as frequently in the area of thermal management. Shojaei et al. [
49] demonstrated an optimised battery cooling schedule during a 24-h duty cycle in high ambient temperatures. In this research, the control of the system was binary, with the option of having the chiller on or off. Perez et al. investigated the problem of splitting the power demand between the electric motor and internal combustion engine on a hybrid vehicle [
50]. Here, a dynamic programming approach was used to minimise the cost function over a drive cycle, resulting in an optimal trajectory describing how the demand should be split. Wang et al. showed dynamic programming could reduce the fuel costs of a Toyota Prius by
[
29]. Others describe how DP represents the benchmark of what can be achieved in a dynamic problem [
27,
28].
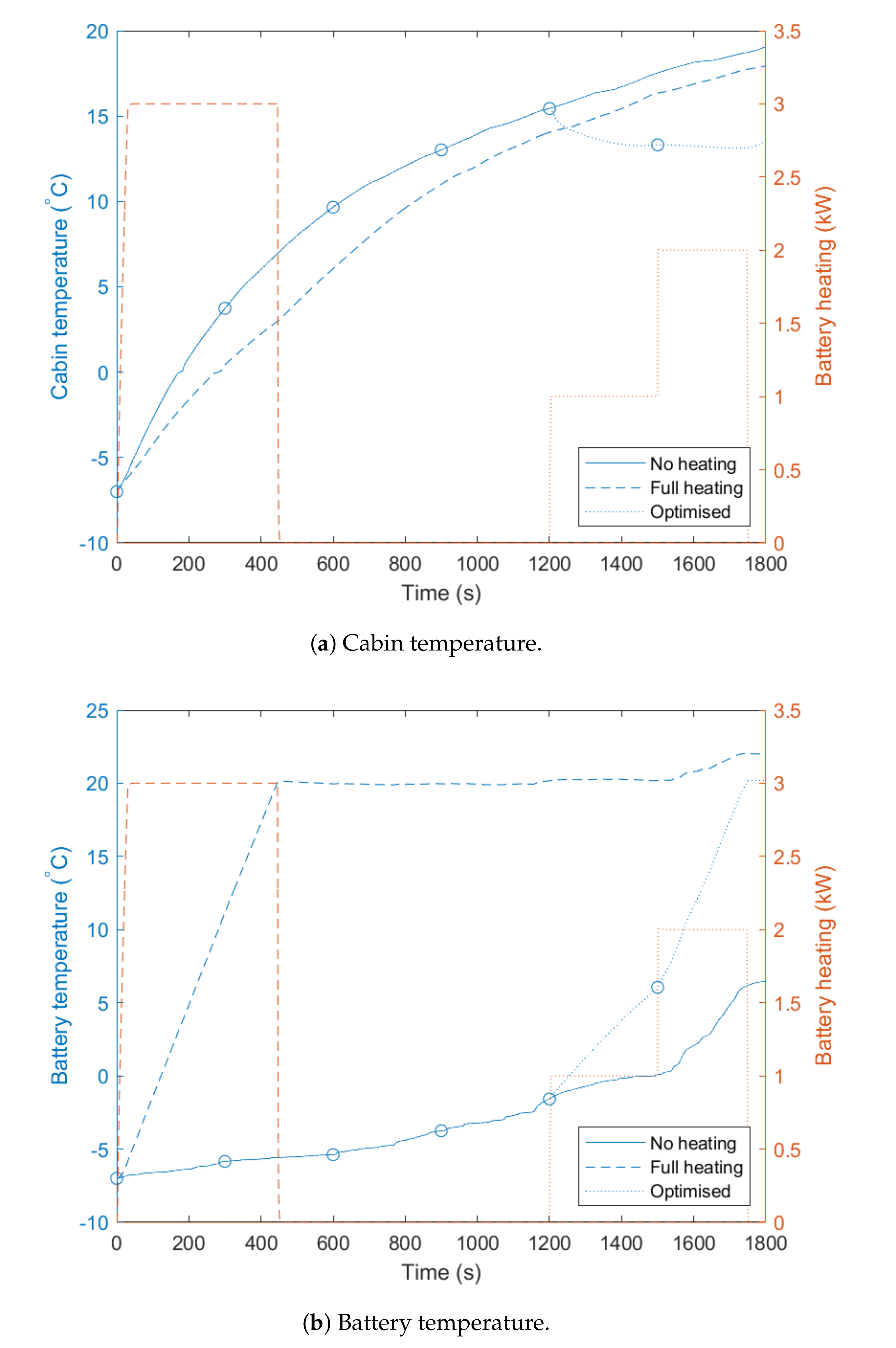
Although DP offers global optimality for control problems, it struggles to be implementable due to the “curse of dimensionality" which causes the computational problem to grow beyond manageable limits. However, it is the only option for ensuring global optimality and is, therefore, the most appropriate choice for exploratory research into the problem. DP has not yet been used to produce a multi-level heating trajectory for vehicle components during a drive cycle. The work in this paper, therefore, represents a new application of this well known technique. Furthermore, DP has been coupled to a cost function with variable weightings which can control the balance between energy, range, and comfort. To demonstrate the superiority of this control method, the DP has been compared to simple heating strategies in the results. The simple strategies used are no battery heating and full battery heating, where the battery is heated at 10 kW from the start of the cycle until it reaches target temperature.
5.1. Problem Definition
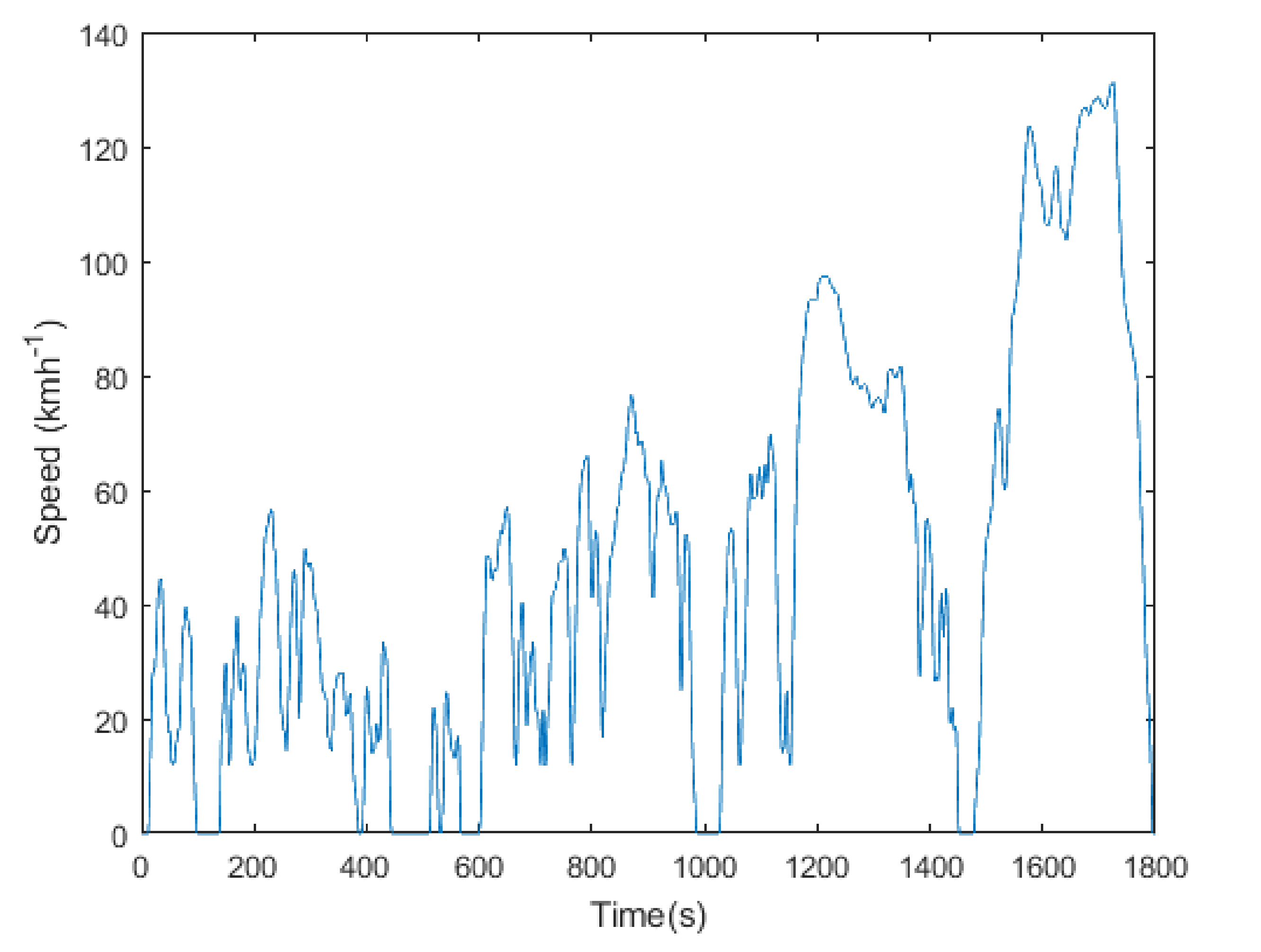
The objective of using DP is to produce a heating trajectory to control the interaction between the heat pump and the battery to balance vehicle performance with cabin comfort during the World harmonised Light Vehicle Test Procedure (WLTP). The WLTP drive cycle has been selected for use in this research as it is the mandatory test to establish vehicle emission performance in Europe.
The balance between vehicle performance and cabin comfort will be achieved by minimising a cost metric,
J. This process is described by Equation (
11), where
is the input vector, which describes the amount of heat delivered to the battery at the
kth time step, as seen in
Figure 1.
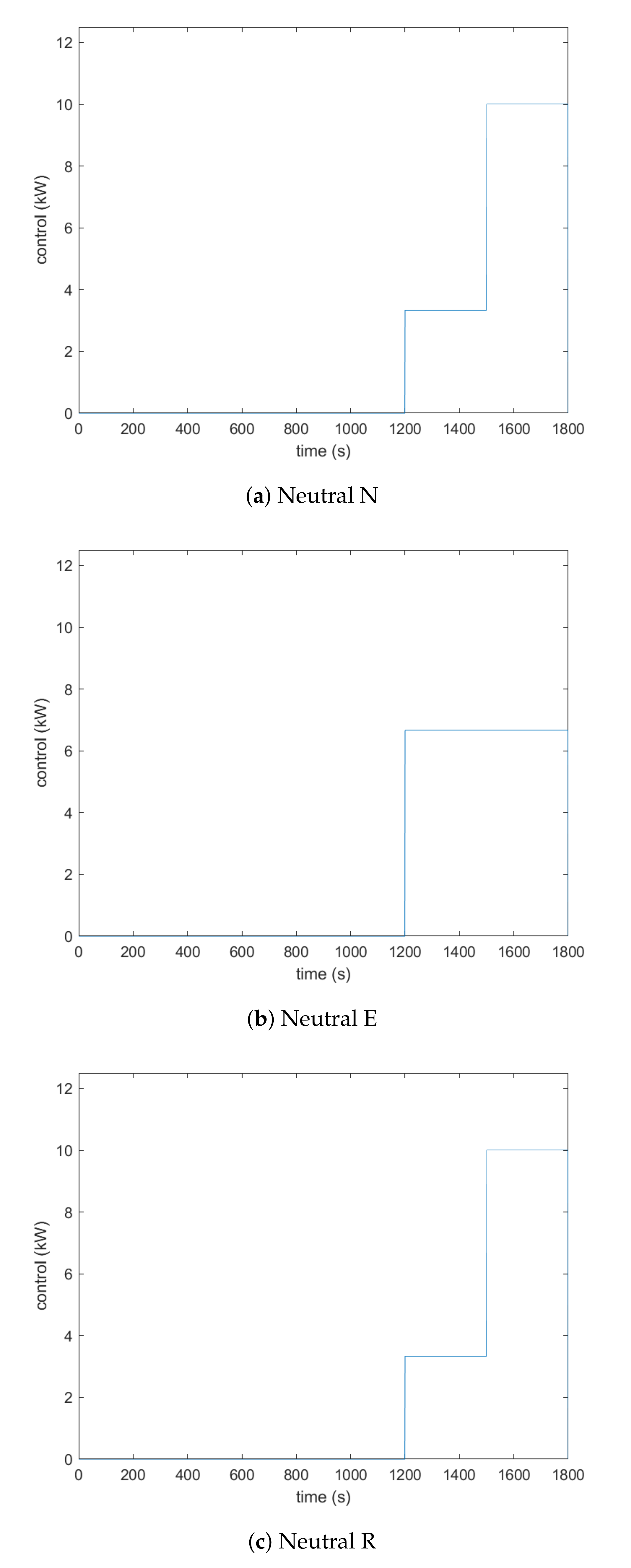
is discretised into four heating levels: none (0 kW), low (
kW), medium (
kW), high, or full (10 kW). The state variables,
, for the problem are
and
, which represent the cabin and battery temperatures, respectively; this is also seen in
Figure 1. These are discretised into
C and
C increments, respectively. The problem is also discretised into time steps of 300 s. This time step length was chosen since it is approximately the length of time of the shortest segment of WLTP cycle (which is used for this research). This ensures that the time resolution is high enough to identify the required battery heating quantity for each section of the chosen drive cycle.
Other vehicle states (such as vehicle speed) which are not affected through the choice heating control will also vary through the drive cycle, and these are known as static parameters. In the first step of the implementation procedure, shown in
Figure 12, a selection of vehicle parameters are recorded to be used as static parameters. These are vital for ensuring that the simulation can be reinitialised correctly at an arbitrary point during the drive cycle. The list of variables considered is:
Vehicle speed;
Motor temperature;
Thermal battery temperature;
Heater core temperature;
High temperature coolant temperature;
Chiller coolant temperature;
Condenser refrigerant temperature;
Evaporator refrigerant temperature;
Compressor speed;
Compressor controller variables;
PTC heat output;
Battery SOC.
While the control option will have no effect on the vehicle speed, it is likely to have an effect on some of the other parameters from this list. For example, should the battery heating be initiated late in the drive cycle, it may cause an increase in compressor speed, which would not be captured using the compressor speed as a static parameter. It may be argued then that these variables should be included as state variables. However, this approach would not be feasible since the computation effort would increase exponentially with the addition of each new state variable due to the “curse of dimensionality”. It is, therefore, assumed that, for items two to twelve on the list presented above, the variation in their value due to different battery heating requests is either insignificant or the variation caused is inconsequential to the cost function and cost matrix.
5.2. Cost Function
The cost function is defined to account for three factors critical to performance and comfort, which are represented using three vehicle metrics. The first metric is energy consumption which incentivises the minimisation of HVAC usage. The second is depth of discharge (DOD) which correlates directly to remaining range and is separable from energy consumption due to the subtleties of the impacts of low temperature on battery performance [
32]. For example, it is possible to spend extra energy on heating the battery at the start of the drive cycle, resulting in higher battery temperatures and a higher final SOC. In this case, the energy efficiency would be reduced, but the vehicle range increased [
32]. Finally, comfort is represented with the third metric, which is paramount to the user experience of electric vehicles. These three attributes correspond to objectives
,
, and
, which are defined by:
Here,
is the open circuit voltage, which is used instead of terminal voltage to include cell internal losses;
is the battery current;
and
are the start and end times of the
kth time step;
is the battery state of charge; and
is the measured cabin temperature, with
C being the cabin target temperature. The individual objectives are combined in the following way to define the cost
, which represents the cost at the
kth time step of the solution.
Here,
are weighting factors used to control the desired balance between battery performance and comfort; a full definition and explanation of these factors is given in
Section 6.1.
are the normalisation factors which are defined using Equation (
16). For this normalisation, the vehicle is operated in a baseline configuration, in which the battery is not heated, and generates cost metrics
. Hence, for the purpose of the dynamic optimisation, improvements in cost correspond to improvements over the no heating strategy.
5.3. Implementation
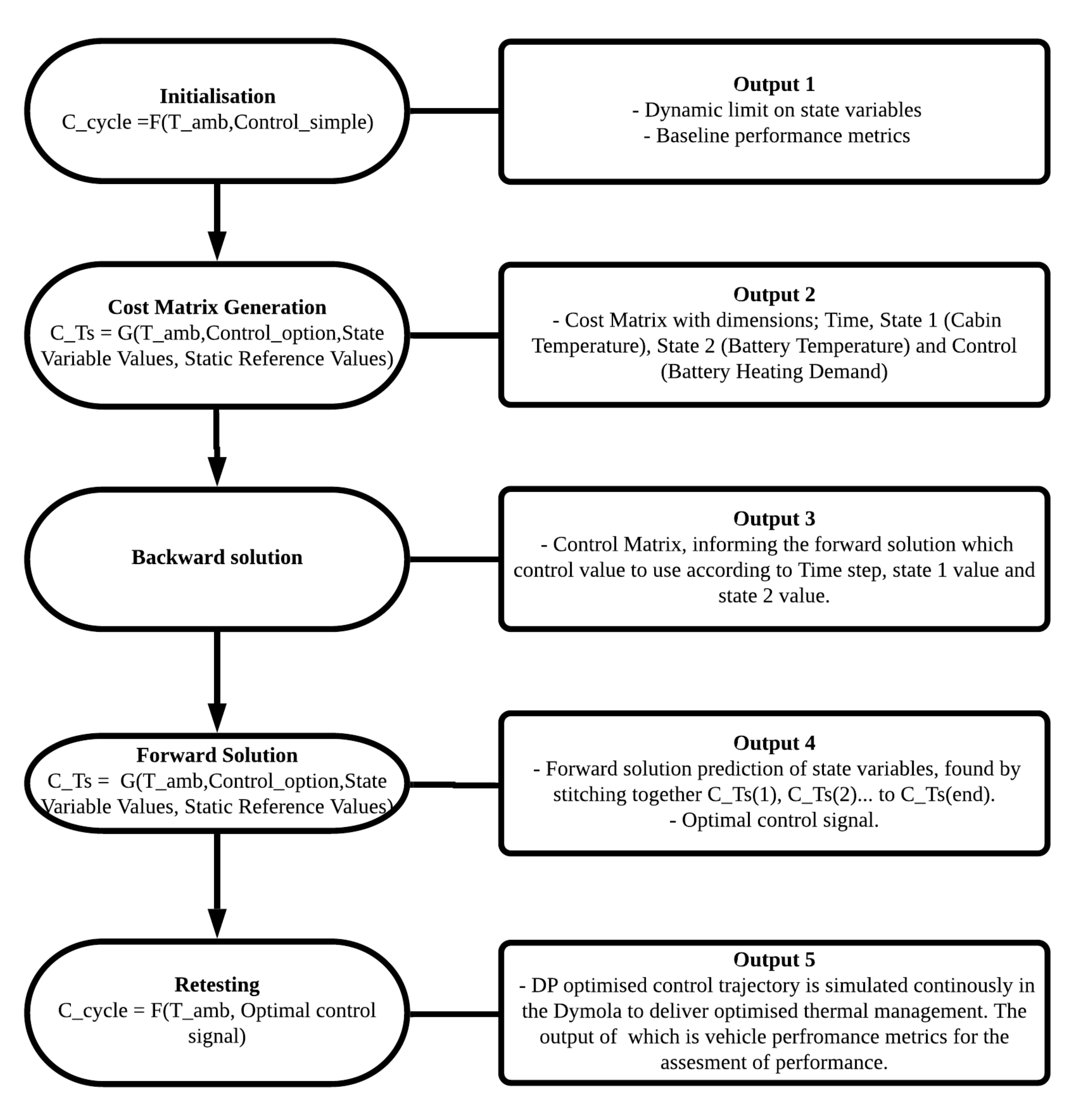
In this section, the procedure to implement the DP solution is described. The method for implementing the DP approach is described in the following steps.
Step 1. DP search boundary generation through the evaluation of the model under cases: firstly with full battery heating (10 kW requested at the start of the cycle) and no battery heating. These two cases are also used to generate static parameters for the problem and used for comparison in
Section 6.1.
Step 2. Cost matrix generation. Here, the cost is found at every 300 s and at every feasible state (discretised cabin and battery temperature) and for every control option. The cost matrix describes the consequence of using every control at every point in the problem and, hence, can be used to find a control sequence which minimises cost.
Step 3. Backwards solution. Here, the open source algorithm works backwards through the cost matrix and finds the control option which minimises the cost at every point in the state space. The output of this is a control lookup table which is used in the forward solution to identify which control option to use at each time step.
Step 4. Forward solution. The problem is simulated iteratively (each time step reinitialised and simulated separately); after each time step, the vehicle’s location in state space is considered, and the control matrix from the backward solution is used to find the control that should be used. The output from this step is the optimised control trajectory.
Step 5. Validate found solution in Dymola. The found control strategy from Step 4 is imported in Dymola and the problem is simulated continuously (without re-initialisation). The output of this step is the final vehicle metrics which can be used to assess progress.
The work flow implemented when using the open source toolbox is visualised in
Figure 12. Here,
C_
is the cost found from simulating the entire cycle, where the inputs into the Dymola model are the ambient temperature and a fixed control strategy, either full battery heating (10 kW) or no battery heating.
C_
is the cost associated with the simulation of the time step
within the drive cycle. Here, the inputs to the Dymola mode are the ambient temperature, the required simulation start time, the control option for that time step, the values of the state variables, and the values of the static variables, which are found using profiles generated in output 1.
To produce the cost matrix, the problem needs to be discretised; hence, the control trajectory for the electric battery heating has been discretised into four levels: none (0 kW), low ( kW), medium ( kW), high, or full (10 kW). This extra discretisation beyond the binary approach, which would be 0 kW or 10 kW, provides extra control over the heating strategy. are the state variables, and , which are discretised into C and C increments, respectively. The problem is also discretised into time steps of 300 s. This time step length was chosen since it is approximately the length of time of the shortest segment of WLTP cycle (which is used for this research). This ensures that the time resolution is high enough to identify the required battery heating quantity for each section of the chosen drive cycle.
7. Discussion
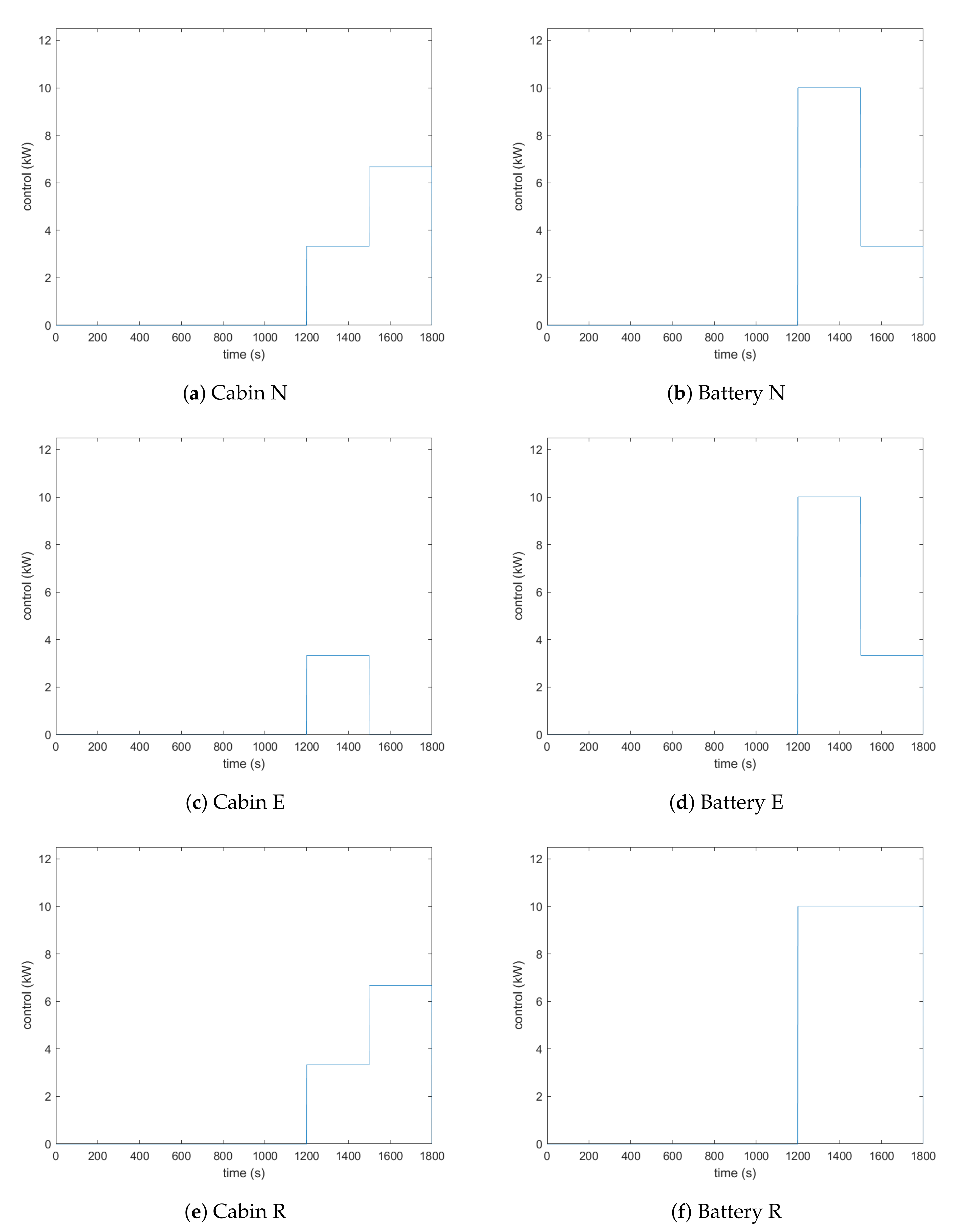
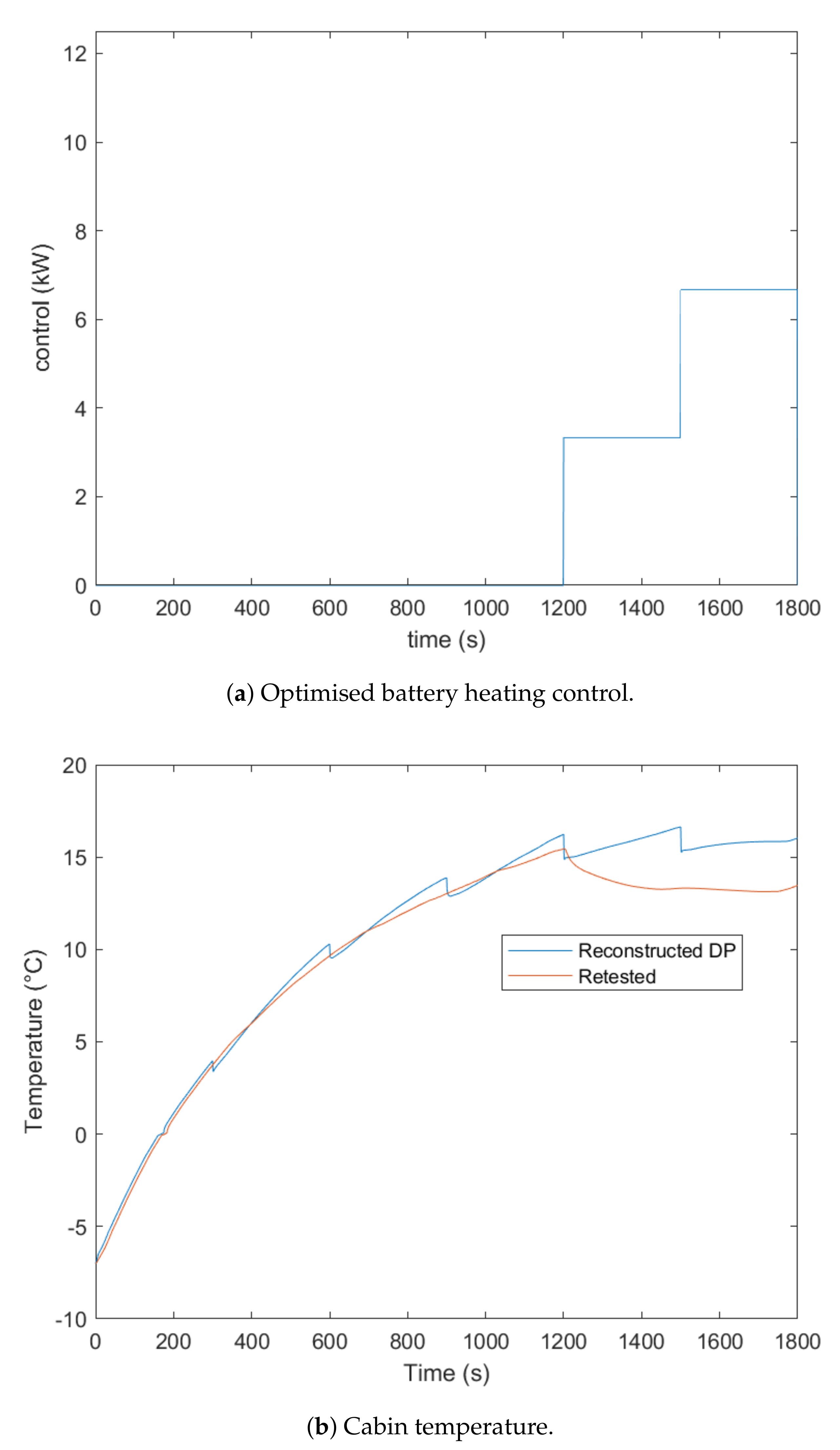
Figure 19a shows the optimised battery heating control generated which prioritising the battery and using a neutral split of battery objectives (“Cabin N”). Here, it can be seen that all of the heating events happen at the end of the cycle. In
Figure 17a, is was seen that this strategy had an adverse impact on cabin temperature.
Figure 19b shows two cabin temperature profiles, the one resulting from the DP-based thermal management optimisation process and one resulting from the implementation of the DP solution into the Dymola model. Here, it can be seen that the during the DP process the algorithm predicted that the cabin would be less affected by the late activation of battery heating. In this section, the discrepancy between the two profiles is investigated.
The optimisation results were derived from the algorithm performing the simulation in consecutive piece-wise sections. Having performed the backward solution, the algorithm consecutively simulates each time step, evaluating the value of the state variables at the end of each simulation, and using this information to decide the control value for the next step. This corresponds to the 4 steps of
Figure 12. This piece-wise simulation approach, generated through the forward solution, is reconstructed into a single trajectory and presented as the reconstructed profile in
Figure 19b. Once the solution is found, it is simulated in full in Dymola to check for agreement with the reconstruction, and this is denoted as the re-simulated profile.
Figure 19b distinctly shows that the algorithm predicts a more comfortable cabin temperature experience than the one generated through the implementation of the optimised control generated. Considering
Figure 19a,b partially explains why this divergence occurs. During the heating phase at 1200 s, the retested cabin temperature begins to deviate from the reconstructed cabin temperature. This implies that, during the reconstruction, the DP algorithm is operating under the assumption that there is more heat availability than their actually is. This can be explained when considering the assumption made about the heater core temperature explained in
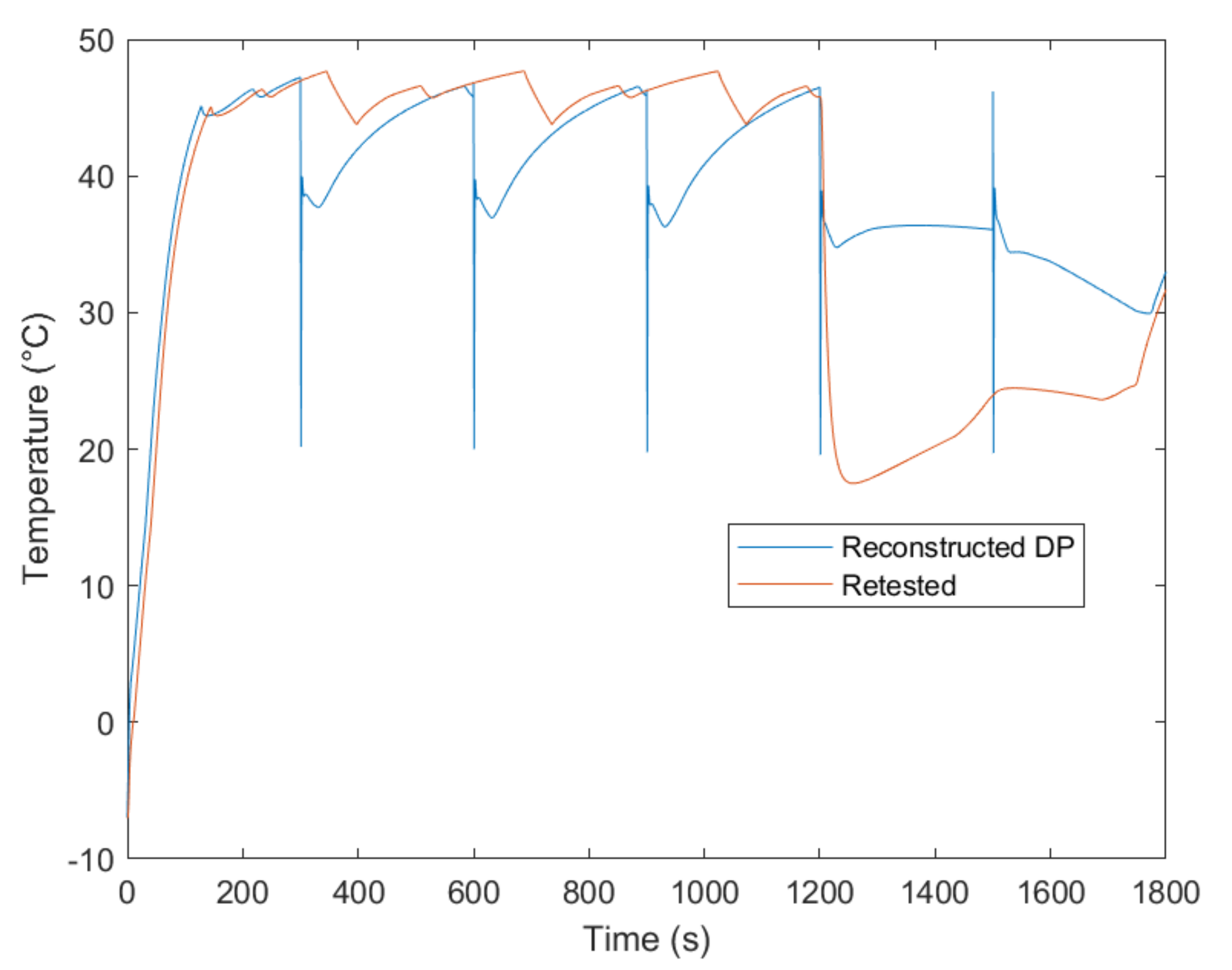
Section 5.1. The reconstructed heater core temperature profile is shown in
Figure 20. The heater core is located between the high temperature circuit and the cabin in
Figure 1, and it converts heat from the high temperature circuit into heated air for the cabin; therefore, its temperature significantly impacts heat delivered to the cabin.
Figure 20 shows that the reconstructed heater core temperature is able to recover instantaneously after the battery heating performed at 1200 s. This means the heater core starts at a higher temperature during the next time step at 1500 s, while the re-simulated heater core temperature remains low as the battery heating continues. This happens because its initialisation value is controlled by the static parameter trajectory (
Section 5.1) which is not adapted due to the previous time steps control value. However, it can be seen from the re-simulated trajectory that the heater core temperature is not able to instantly recover after the heating event; therefore, the cabin temperature does not rise as quickly as expected. The DP algorithm will understand the over predicted heater core temperature as an abundance of heat available to the cabin. The algorithm assumes that heat can be delivered to the battery at little cost to the cabin comfort due to the high heater core temperature; however, this is not the case, and the cabin temperature suffers.
The solution to this is to include the heater core temperature as a state variable. Therefore, after a heating event when the heater core temperature is lowered, the cost matrix will be able to predict the cost of starting at this reduced heater core temperature, which may discourage the use of battery heating under some circumstances. The inclusion of heater core temperature as a state variable will also improve the accuracy of the reconstructed cabin temperature when predicting the consequences of implementing the optimised battery heating control strategy. However, the inclusion of the heater core as a state variable adds to the “curse of dimensionality” when using dynamic programming. As an example, if 8 values of heater core temperature are to be used (for example), then the simulation time required to complete cost matrix would increase by a factor of 8. This could make the computational cost prohibitively long.
8. Conclusions and Further Work
A dynamic optimisation was performed to find the optimal dynamic heating strategy for a battery electric vehicle. It was demonstrated to be able to successfully find a balance between range and comfort in
Section 6.3. The result of this optimisation was a
% increase in range compared to no battery heating and
% increase in thermal comfort compared to full battery heating, at an ambient temperature of
C.
In
Section 6.4, a sensitivity analysis was performed at different ambient temperatures. This resulted in a recommendation for the best heating strategies to use dependant on ambient temperature and desired priority. Finally, there was a recommendation of when, and by how much, to heat the during a drive cycle depending on different priorities and ambient temperatures, shown in
Table 11.
The heating optimisation method shown in this work is not compatible with direct use in a real world use cases. Exploring a wide spectrum of driving scenarios with this method can provide the data required to optimise heating strategies off-line. The results can be then utilised as a control benchmark to develop an intelligent heating control strategy suitable for real-time application.
The next step to be performed in this work is to refine the method by including the heater core temperature as a state variable, as described in
Section 7. Upon the success of this refinement, the method should be expanded to incorporate more drive cycles and an intelligent scenario recognition control, which will automated the choice of the ideal control strategy. This will represents steps in the direction of real world implementation.
Develop intelligent controller to recognise driving condition and deploy appropriate control.
Include heater core as a state variable to improve performance of DP procedure.
Improved state limitation recognition for more computationally efficient DP cost matrix construction.
Although the examples used in this study have focused on the low temperature use case, the same issue is present at high temperatures. Here, the motivation is to reduce the battery temperature to prevent ageing and ensure safety. Battery cooling reduces the cooling capacity available for the cabin, so the method demonstrated here could be reapplied to create dynamic battery cooling trajectories, which balance battery ageing against cabin thermal comfort.
Using this method could increase the acceptance of EV as manufacturers will be able to improve range at low ambient temperatures, while still maintaining high cabin comfort, when extended range is not required. This will allow the vehicle to self regulate and self optimise according to individual journeys and requirements.



 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}