Lithium-Ion Battery SoC Equilibrium: An Artificial Potential Field-Based Method





Abstract
1. Introduction
- (1)
- A real-time battery balancing strategy based on the artificial potential field is proposed, and the mapping between charging deviation and the desired charging current is established through the virtual force generated by the artificial potential field.
- (2)
- A feedback control law is designed to ensure the charging currents of batteries track the desired current, which ensures the of batteries can be balanced.
- (3)
- Extensive experiments have been conducted to verify the effectiveness and advantages of the proposed method.
2. Model of Battery Equilibrium System
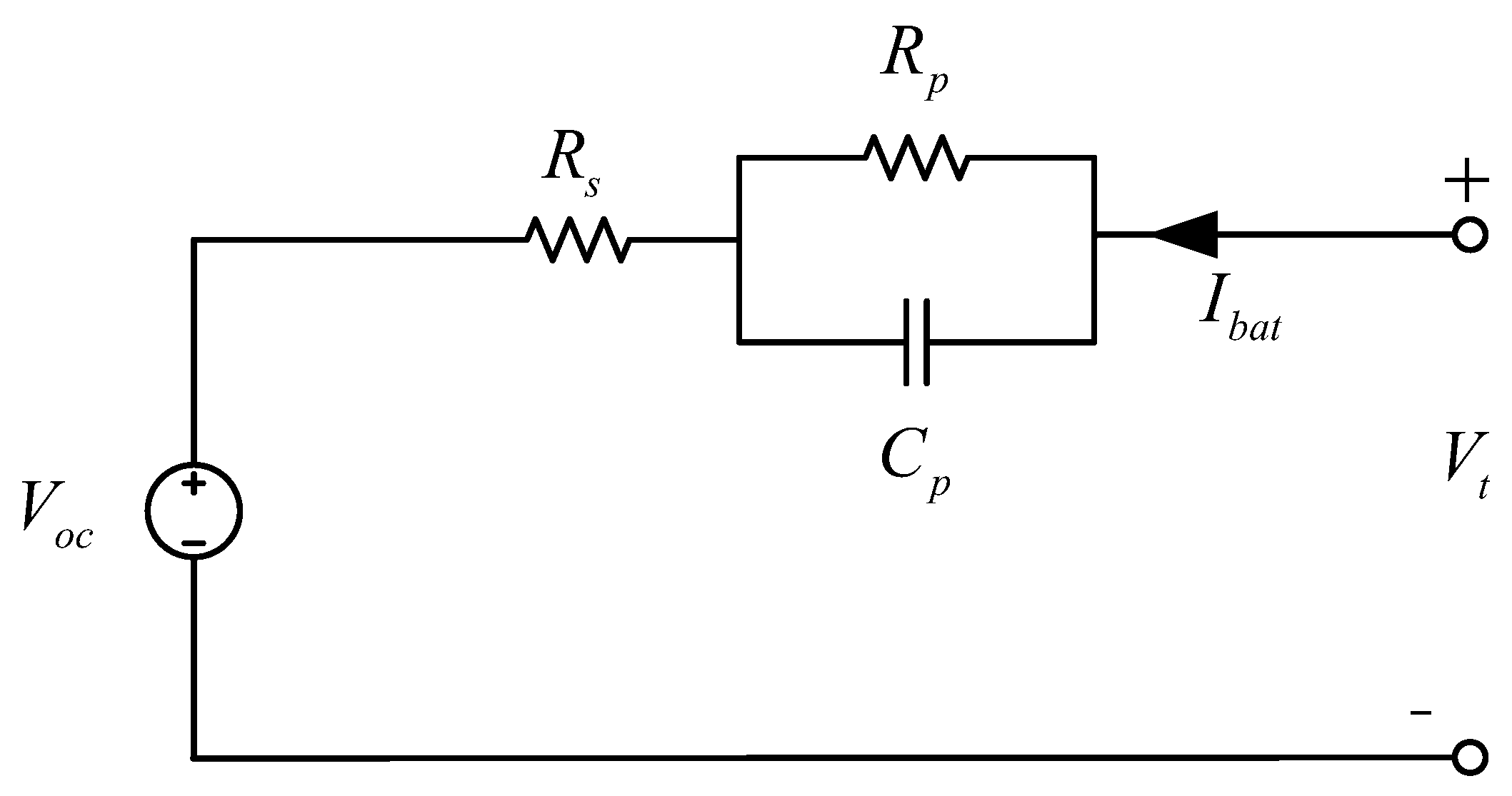
2.1. Model of Battery Cell
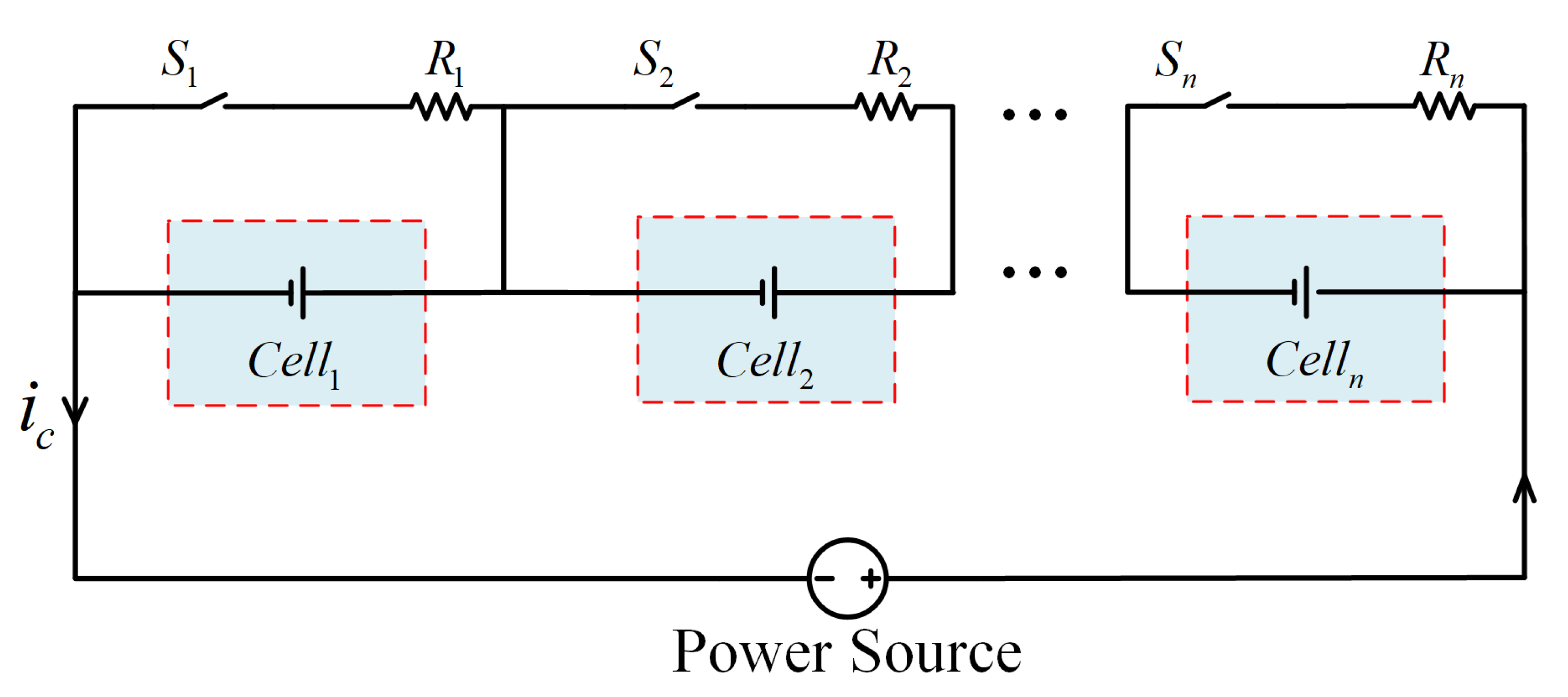
2.2. Model of Balancing Circuit
2.3. Model of Cyber Layer
3. Distributed Balance Strategy Based on Artificial Potential Field
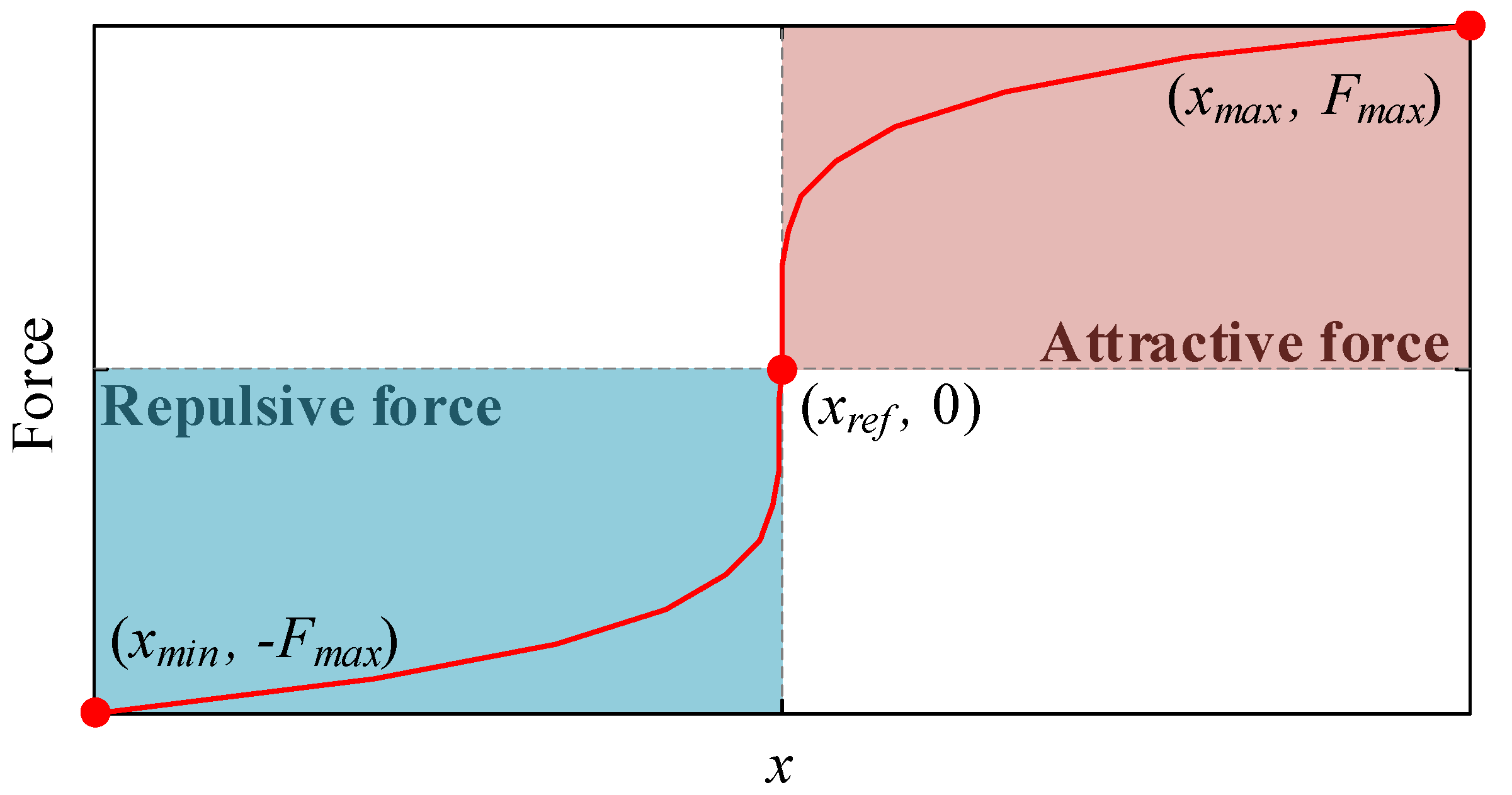
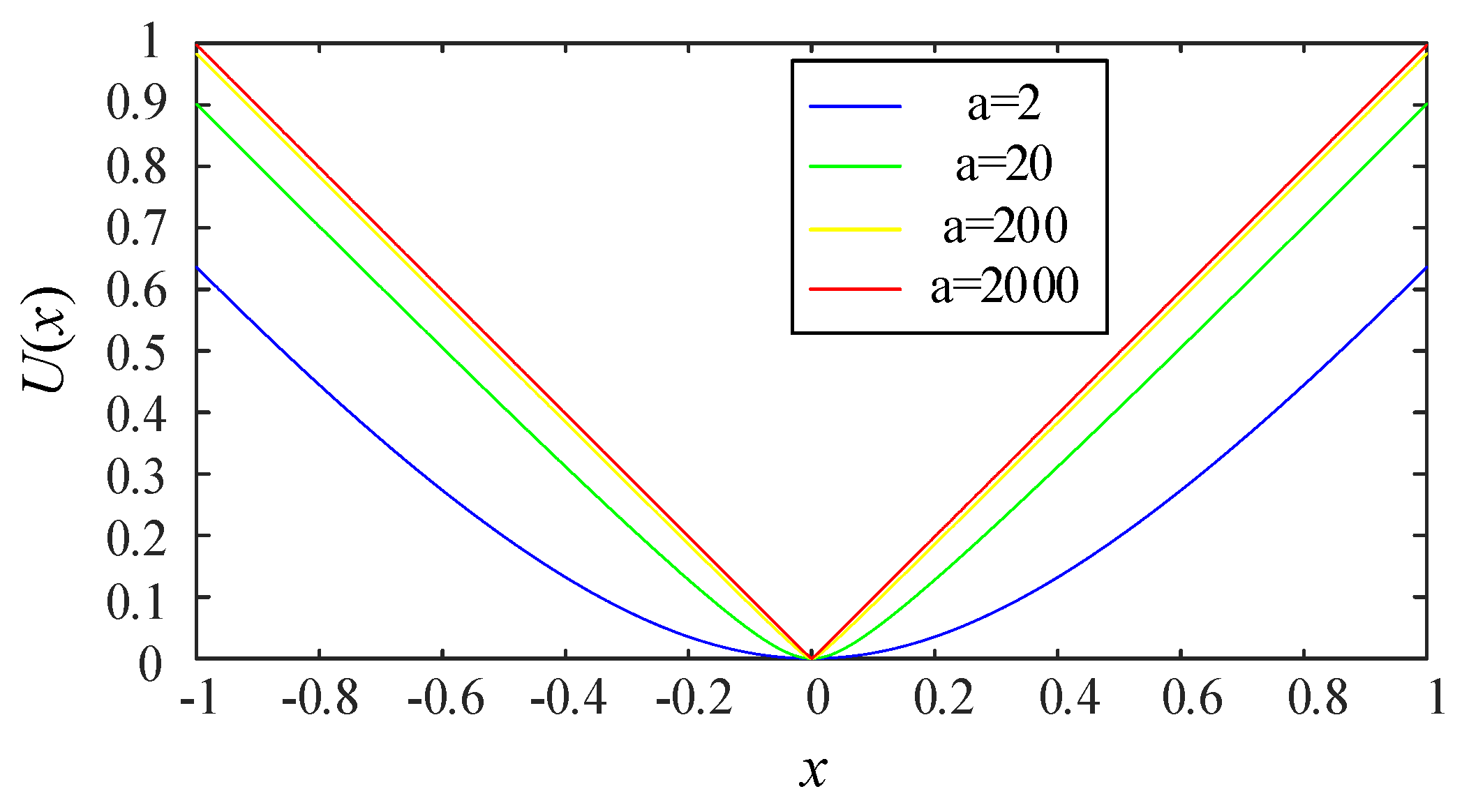
3.1. Artificial Potential Field
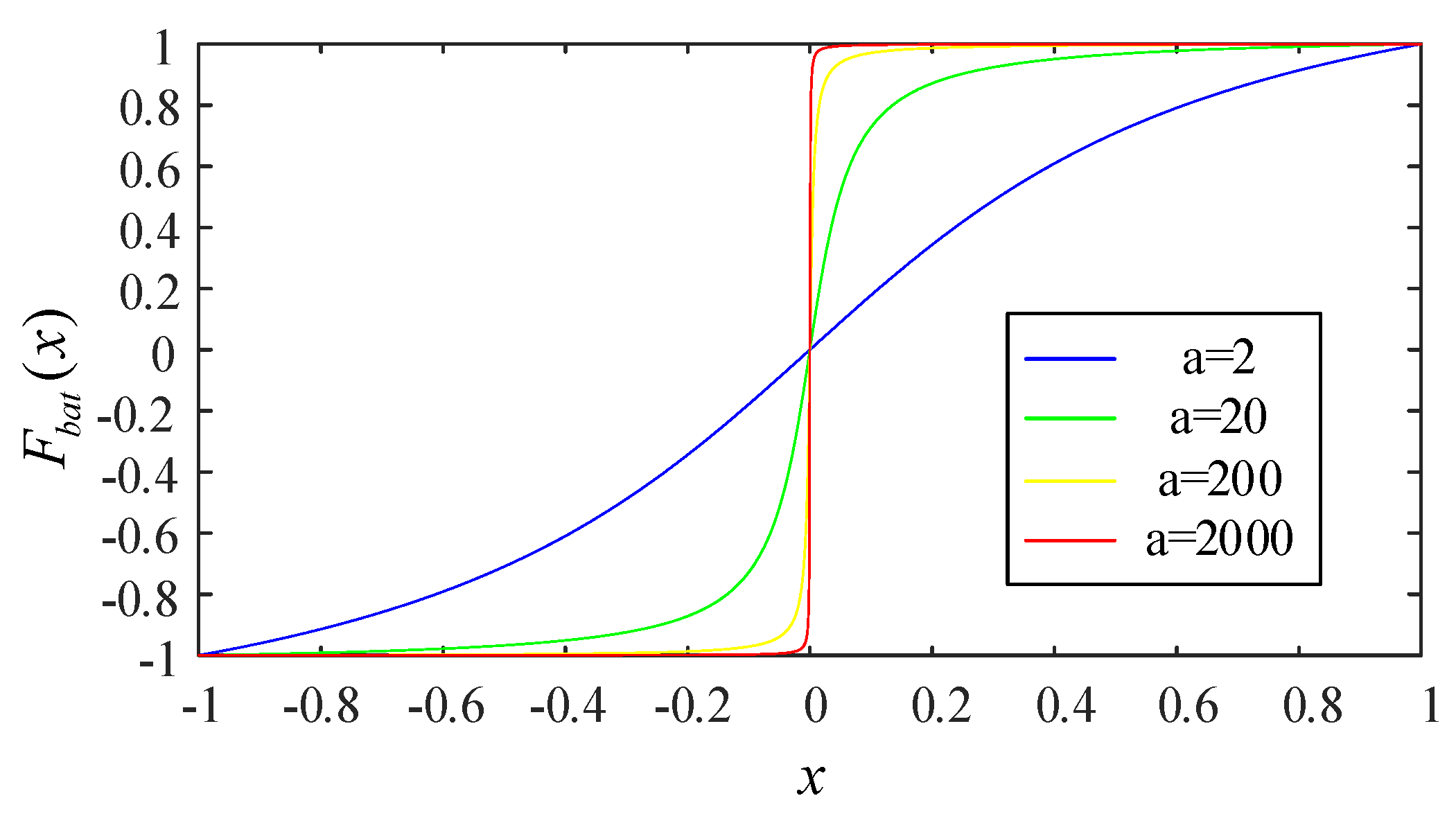
3.2. Construction of Artificial Potential Field
3.3. Measurement of Charge Current
3.4. The Distributed Control Strategy Incorporating Artificial Potential Field
4. Experiment and Analysis
4.1. Parameter Setting
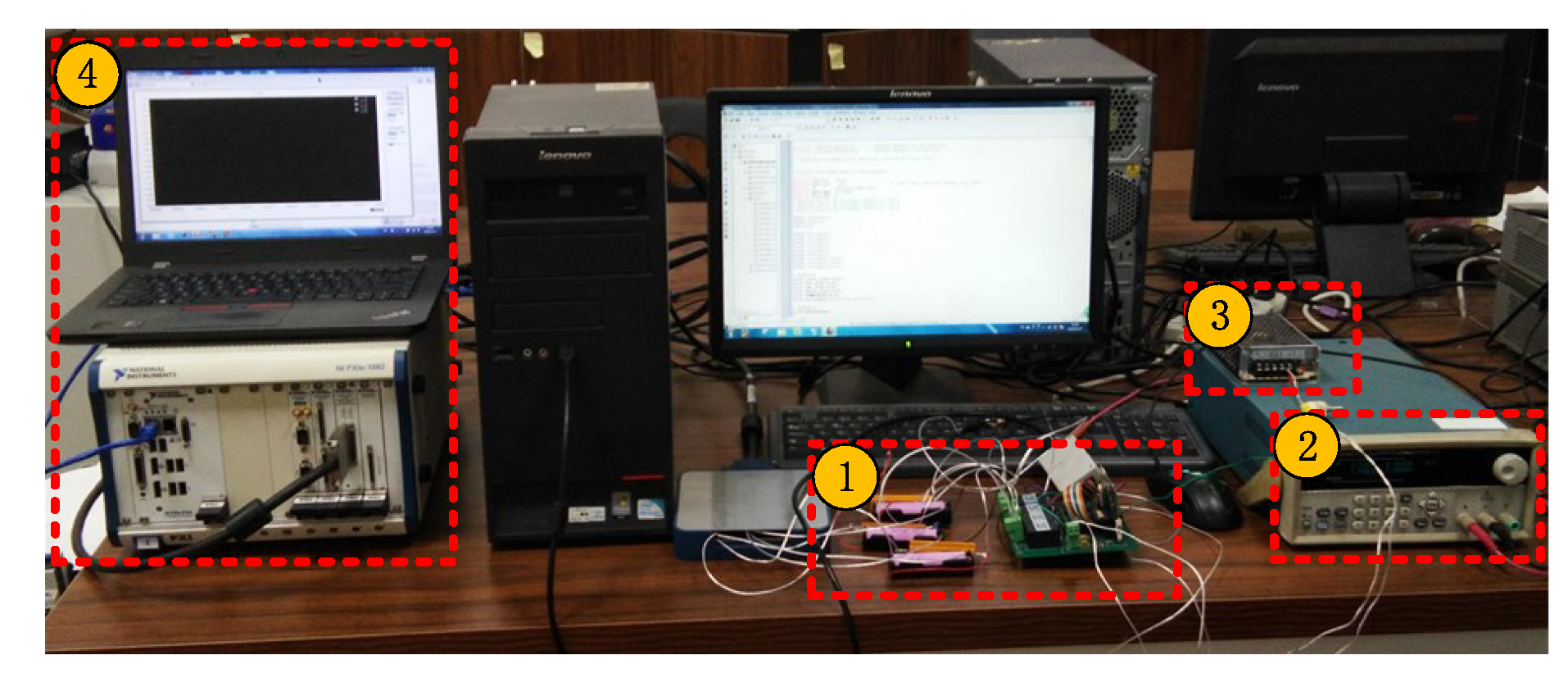
4.2. Experiment Platform
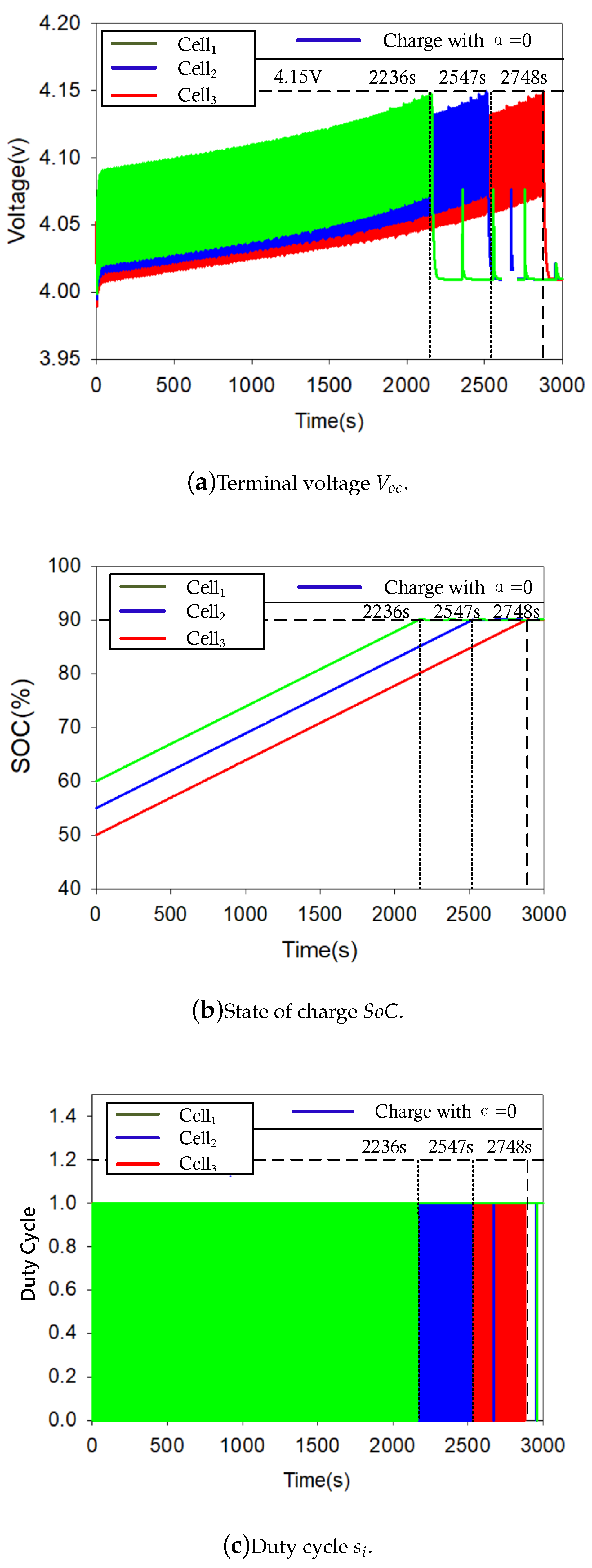
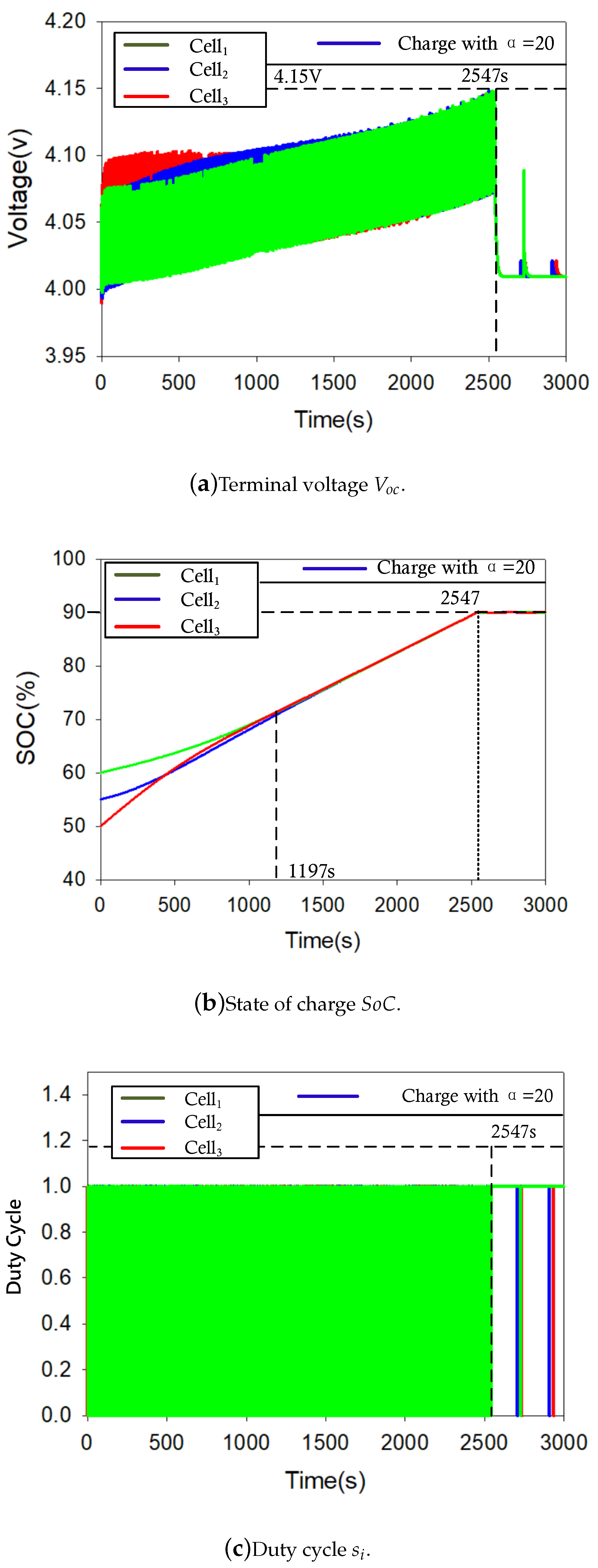
4.3. Experiment Results
4.4. Results Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Hu, X.; Tang, X. Review of modeling techniques for lithium-ion traction batteries in electric vehicles. J. Mech. Eng. 2017, 53, 20–31. [Google Scholar] [CrossRef]
- Xiong, R.; Duan, Y. Development and verification of the equilibrium strategy for batteries in electric vehicles. J. Beijing Inst. Technol. 2018, 27, 22–28. [Google Scholar]
- Cheng, L.; Wang, W.; Wei, S.; Lin, H.; Jia, Z. An improved energy management strategy for hybrid energy storage system in light rail vehicles. Energies 2018, 11, 423. [Google Scholar] [CrossRef]
- Herrera, V.I.; Gaztañaga, H.; Milo, A.; Saez-de Ibarra, A.; Etxeberria-Otadui, I.; Nieva, T. Optimal energy management and sizing of a battery–supercapacitor-based light rail vehicle with a multiobjective approach. IEEE Trans. Ind. Appl. 2016, 52, 3367–3377. [Google Scholar] [CrossRef]
- Herrera, V.; Milo, A.; Gaztañaga, H.; Etxeberria-Otadui, I.; Villarreal, I.; Camblong, H. Adaptive energy management strategy and optimal sizing applied on a battery-supercapacitor based tramway. Appl. Energy 2016, 169, 831–845. [Google Scholar] [CrossRef]
- Wu, Y.; Huang, Z.; Liao, H.; Chen, B.; Zhang, X.; Zhou, Y.; Liu, Y.; Li, H.; Peng, J. Adaptive power allocation using artificial potential field with compensator for hybrid energy storage systems in electric vehicles. Appl. Energy 2020, 257, 113983. [Google Scholar] [CrossRef]
- Ahmad, A.B.; Ooi, C.A.; Ishak, D.; Teh, J. State-of-charge balancing control for On/OFF-line internal cells using hybrid modular multi-level converter and parallel modular dual L-bridge in a grid-scale battery energy storage system. IEEE Access 2018, 7, 131–147. [Google Scholar] [CrossRef]
- Huang, W.; Qahouq, J.A.A. Energy sharing control scheme for state-of-charge balancing of distributed battery energy storage system. IEEE Trans. Ind. Electron. 2014, 62, 2764–2776. [Google Scholar] [CrossRef]
- Zhang, S. Chemomechanical modeling of lithiation-induced failure in high-volume-change electrode materials for lithium ion batteries. NPJ Comput. Mater. 2017, 3, 1–11. [Google Scholar] [CrossRef]
- Nitta, N.; Wu, F.; Lee, J.T.; Yushin, G. Li-ion battery materials: Present and future. Mater. Today 2015, 18, 252–264. [Google Scholar] [CrossRef]
- Bruen, T.; Marco, J.; Gama, M. Model based design of balancing systems for electric vehicle battery packs. IFAC-PapersOnLine 2015, 48, 395–402. [Google Scholar] [CrossRef]
- Isaacson, M.; Hollandsworth, R.; Giampaoli, P.; Linkowsky, F.; Salim, A.; Teofilo, V. Advanced lithium ion battery charger. In Proceedings of the Fifteenth Annual Battery Conference on Applications and Advances (Cat. No. 00TH8490), Long Beach, CA, USA, 11–14 January 2000; IEEE: New York, NY, USA, 2000; pp. 193–198. [Google Scholar]
- Li, L.; Huang, Z.; Li, H.; Peng, J. A rapid cell voltage balancing scheme for supercapacitor based energy storage systems for urban rail vehicles. Electr. Power Syst. Res. 2017, 142, 329–340. [Google Scholar] [CrossRef]
- Agrawal, B.; Adam, M.; Vadala, B.; Koke, H.; McCurlie, L.; Preindl, M.; Ahmed, R.; Emadi, A. Non-dissipative battery cell balancing using half-bridge switching circuit. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; IEEE: New York, NY, USA, 2016; pp. 1–6. [Google Scholar]
- Li, H.; Peng, J.; Zhou, Y.; He, J.; Huang, Z.; He, L.; Pan, J. Soh-aware charging of supercapacitors with energy efficiency maximization. IEEE Trans. Energy Convers. 2018, 33, 1766–1775. [Google Scholar] [CrossRef]
- Daowd, M.; Omar, N.; Van Den Bossche, P.; Van Mierlo, J. Passive and active battery balancing comparison based on MATLAB simulation. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; IEEE: New York, NY, USA, 2011; pp. 1–7. [Google Scholar]
- Vitols, K. Design of an embedded battery management system with passive balancing. In Proceedings of the 2014 6th European Embedded Design in Education and Research Conference (EDERC), Milan, Italy, 11–12 September 2014; IEEE: New York, NY, USA, 2014; pp. 142–146. [Google Scholar]
- Linzen, D.; Buller, S.; Karden, E.; De Doncker, R.W. Analysis and evaluation of charge-balancing circuits on performance, reliability, and lifetime of supercapacitor systems. IEEE Trans. Ind. Appl. 2005, 41, 1135–1141. [Google Scholar] [CrossRef]
- Quinn, D.D.; Hartley, T.T. Design of novel charge balancing networks in battery packs. J. Power Sources 2013, 240, 26–32. [Google Scholar] [CrossRef]
- Zhong, L.; Zhang, C.; He, Y.; Chen, Z. A method for the estimation of the battery pack state of charge based on in-pack cells uniformity analysis. Appl. Energy 2014, 113, 558–564. [Google Scholar] [CrossRef]
- Meng, J.; Ricco, M.; Luo, G.; Swierczynski, M.; Stroe, D.I.; Stroe, A.I.; Teodorescu, R. An overview and comparison of online implementable SOC estimation methods for lithium-ion battery. IEEE Trans. Ind. Appl. 2017, 54, 1583–1591. [Google Scholar] [CrossRef]
- Nejad, S.; Gladwin, D.; Stone, D. A systematic review of lumped-parameter equivalent circuit models for real-time estimation of lithium-ion battery states. J. Power Sources 2016, 316, 183–196. [Google Scholar] [CrossRef]
- Kim, J.; Shin, J.; Chun, C.; Cho, B. Stable configuration of a Li-ion series battery pack based on a screening process for improved voltage/SOC balancing. IEEE Trans. Power Electron. 2011, 27, 411–424. [Google Scholar] [CrossRef]
- Ouyang, Q.; Chen, J.; Zheng, J.; Hong, Y. SOC estimation-based quasi-sliding mode control for cell balancing in lithium-ion battery packs. IEEE Trans. Ind. Electron. 2017, 65, 3427–3436. [Google Scholar] [CrossRef]
- Daowd, M.; Omar, N.; Van den Bossche, P.; Van Mierlo, J. A review of passive and active battery balancing based on Matlab/Simulink. Int. Rev. Electr. Eng. 2011, 6, 2974–2989. [Google Scholar]
- Aizpuru, I.; Iraola, U.; Canales, J.; Echeverria, M.; Gil, I. Passive balancing design for Li-ion battery packs based on single cell experimental tests for a CCCV charging mode. In Proceedings of the 2013 International Conference on Clean Electrical Power (ICCEP), Alghero, Italy, 11–13 June 2013; IEEE: New York, NY, USA, 2013; pp. 93–98. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance for manipulators and mobile robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; IEEE: New York, NY, USA, 2003. [Google Scholar]
- Mostafa, A.; Das, M. Robust identification of time-varying electrical equivalent circuit models of Li-ion batteries. In Proceedings of the 2017 IEEE International Conference on Electro Information Technology (EIT), Lincoln, NE, USA, 14–17 May 2017; pp. 382–387. [Google Scholar]
- Du, J.; Wang, Y.; Wen, C. Li-ion battery SOC estimation using particle filter based on an equivalent circuit model. In Proceedings of the 2013 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013; IEEE: New York, NY, USA, 2013; pp. 580–585. [Google Scholar]
- Jiang, F.; Jin, C.; Liao, H.; Wu, Y.; Liu, Y.; Peng, J.; Huang, Z. An artificial potential field-based lithium-ion battery soc equilibrium method in electric vehicles. IFAC-PapersOnLine 2020. to be published. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Energy Consumption (wh) | Convergence Time (s) | Charing Time (s) |
|---|---|---|---|
| Conventional method | 10.18 | 2748 | 2748 |
| 9.71 | 1197 | 2547 | |
| 10.43 | 418 | 2547 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, H.; Jiang, F.; Jin, C.; Wu, Y.; Li, H.; Liu, Y.; Huang, Z.; Peng, J. Lithium-Ion Battery SoC Equilibrium: An Artificial Potential Field-Based Method. Energies 2020, 13, 5691. https://doi.org/10.3390/en13215691
Liao H, Jiang F, Jin C, Wu Y, Li H, Liu Y, Huang Z, Peng J. Lithium-Ion Battery SoC Equilibrium: An Artificial Potential Field-Based Method. Energies. 2020; 13(21):5691. https://doi.org/10.3390/en13215691
Chicago/Turabian StyleLiao, Hongtao, Fu Jiang, Cheng Jin, Yue Wu, Heng Li, Yongjie Liu, Zhiwu Huang, and Jun Peng. 2020. "Lithium-Ion Battery SoC Equilibrium: An Artificial Potential Field-Based Method" Energies 13, no. 21: 5691. https://doi.org/10.3390/en13215691
APA StyleLiao, H., Jiang, F., Jin, C., Wu, Y., Li, H., Liu, Y., Huang, Z., & Peng, J. (2020). Lithium-Ion Battery SoC Equilibrium: An Artificial Potential Field-Based Method. Energies, 13(21), 5691. https://doi.org/10.3390/en13215691