An Overview of Applications of the Modular Multilevel Matrix Converter

 ,
, 

 and
and 
Abstract

1. Introduction

- To the best of the authors’ knowledge, this is the first review paper discussing and comparing experimental implementations and applications of the . In the field of MMCCs, there are other review papers available for the [2,9,35,36,37] and Hexverter [16]; comparisons between the and for motor-drive applications [8,21]; and modelling and control approaches for the (a recent review) [28]. However, those papers neither describe practical issues related to the implementation of the nor describe applications of the .
- Some of the most well-known implementations of the reported in the literature are listed and classified.
- In this paper, guidelines to designing and dimensioning the most important electrical parameters of the are described.
- The is compared to other MMCCs, such as the Hexverter and the , in terms of component counts and effectiveness. Results were obtained for a 10 MW case of study.
- Furthermore, a review of promissory applications for the , such as wind energy, motor drives and flexible AC transmission systems (FACTSs), is presented. Simulations and experimental results are given to support the effectiveness of the topology in these applications.
2. M3C Control and Hardware Challenges
2.1. Control Issues and Floating Capacitor Voltage Oscillations
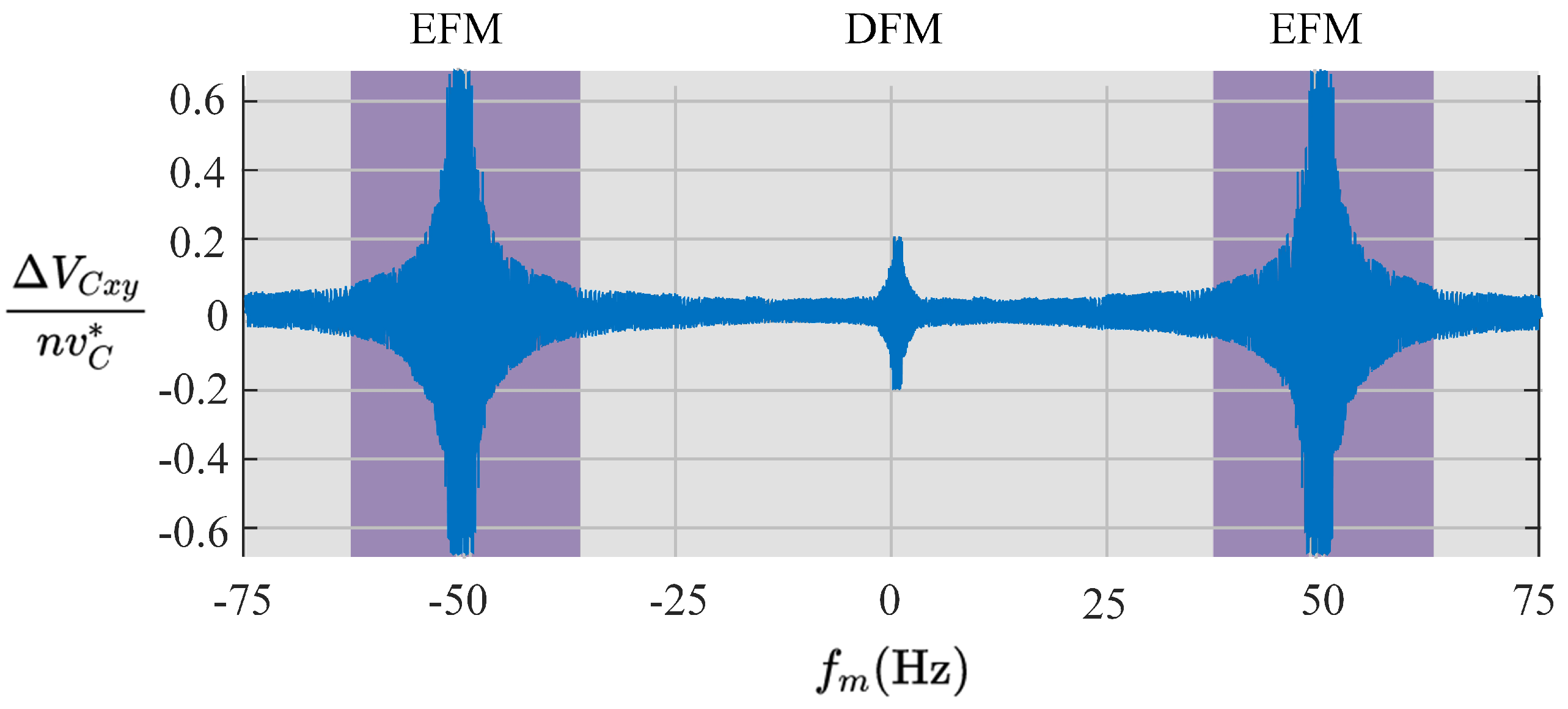
- The DFM is defined as the zone where the input-port frequency is lower or higher (by a given threshold) than the output-port frequency. In this mode, the floating capacitor voltage oscillations are not high (see Figure 3). Then, the control of the needs to regulate just the mean values of the floating capacitor voltages using mostly circulating currents.
- The EFM is defined as the zone where the absolute value of the input-port frequency is pretty close or equal to the output-port frequency, i.e., . In EFM, high oscillations appear in the floating capacitor voltages, and then mitigation signals (circulating currents and common-mode voltage) or operation point constraints must be employed to reduce them.
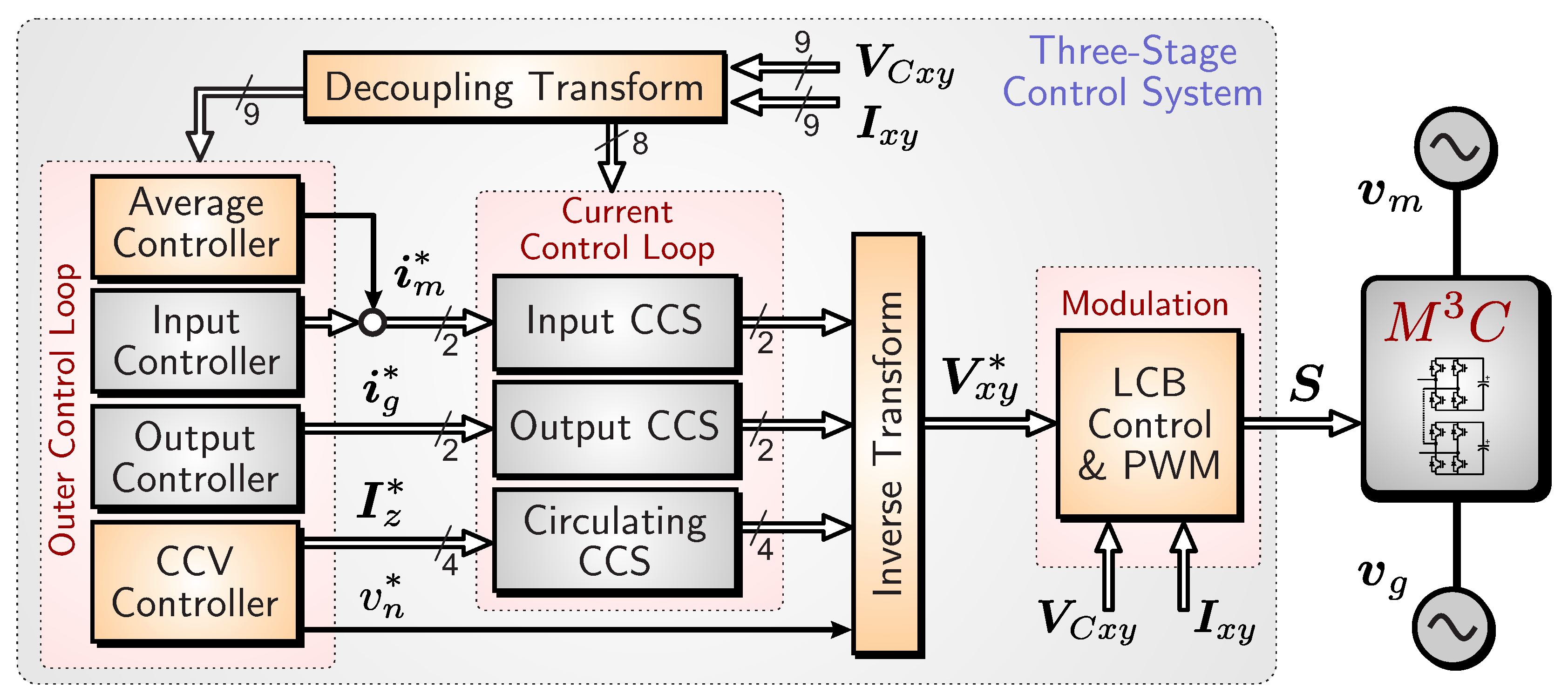
Control Issues
- The control of the input and output currents.
- The control of the floating capacitor voltages.
- The minimisation of circulating currents and common-mode voltage (CMV).
- One of the most critical control tasks is to maintain the floating capacitor voltages fluctuating within an acceptable range. The oscillations in the floating capacitor voltages are inversely proportional to the difference between the input and output port frequencies (i.e., |). Then, the operation of the for similar or equal input/output port frequencies is challenging to achieve because the large oscillations produced in the CCVs (see Equation (8)) must be mitigated using compensation currents and common-mode voltage [39,51].
- The regulation of the internal currents of the , referred to as circulating currents [18], plays a vital role in achieving effective floating capacitor voltage regulation. Then, the measurement and estimation of these currents must be performed while dealing with currents with several frequency components that must be regulated without affecting the input and output port variables [43].
- In high-power applications, a high number of power-cells can be required, and then a very high number of possible voltage vectors can be obtained ( where n indicates the number of power-cells [27]). Therefore, some methodologies which are based on voltage states, for example, the space vector modulation techniques and/or finite set model predictive control, are very difficult to implement. Therefore, other modulation techniques and methods to achieve voltage regulation of the power-cell must be considered without increasing the complexity of the overall control system, ensuring proper voltage balancing and ensuring low power losses [52].
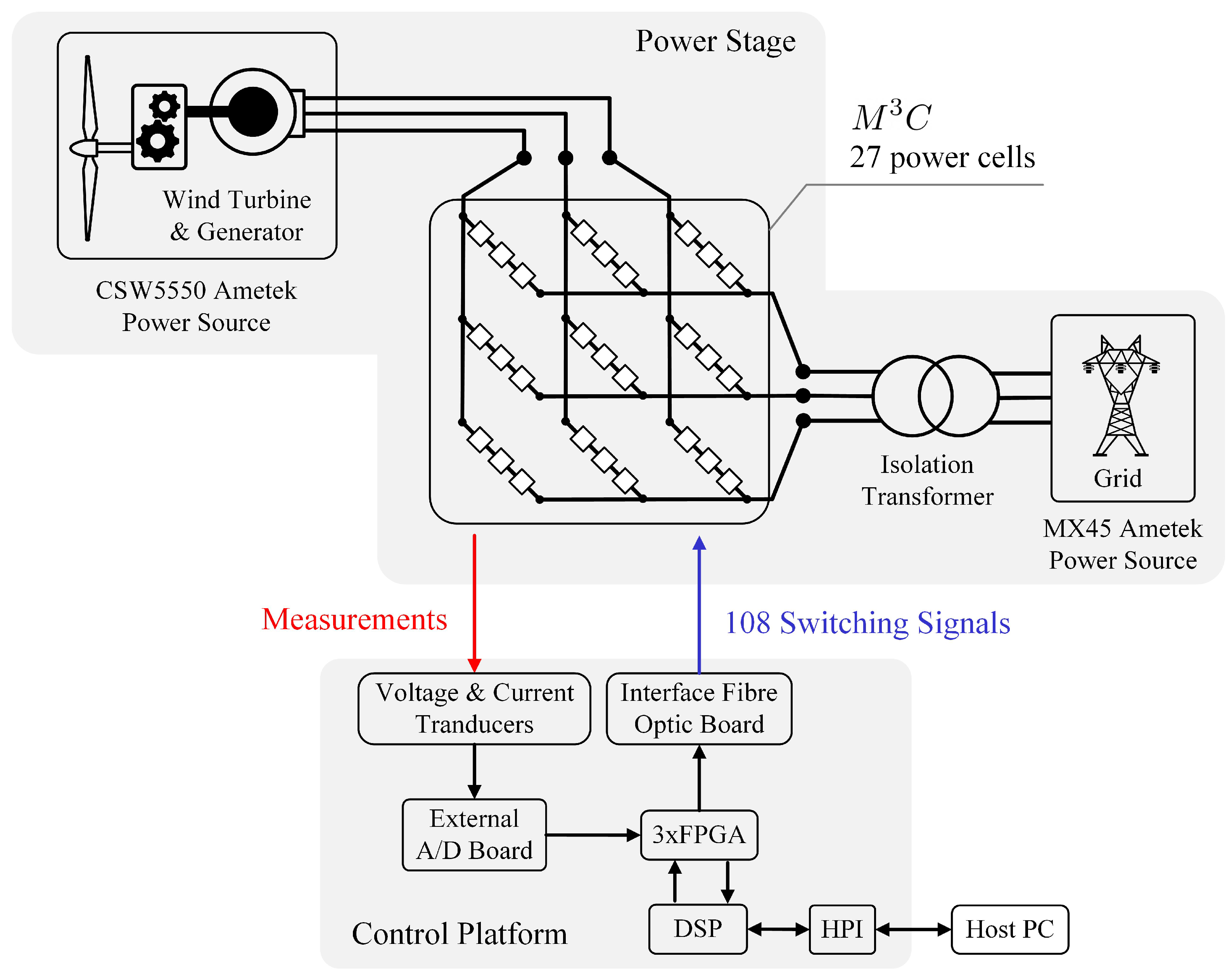
2.2. Hardware Implementations of
2.3. Design and Dimensioning
2.3.1. Voltage and Current Rating
2.3.2. Number of Power-Cells
2.3.3. Power-Cell Capacitor
2.3.4. Cluster Inductor
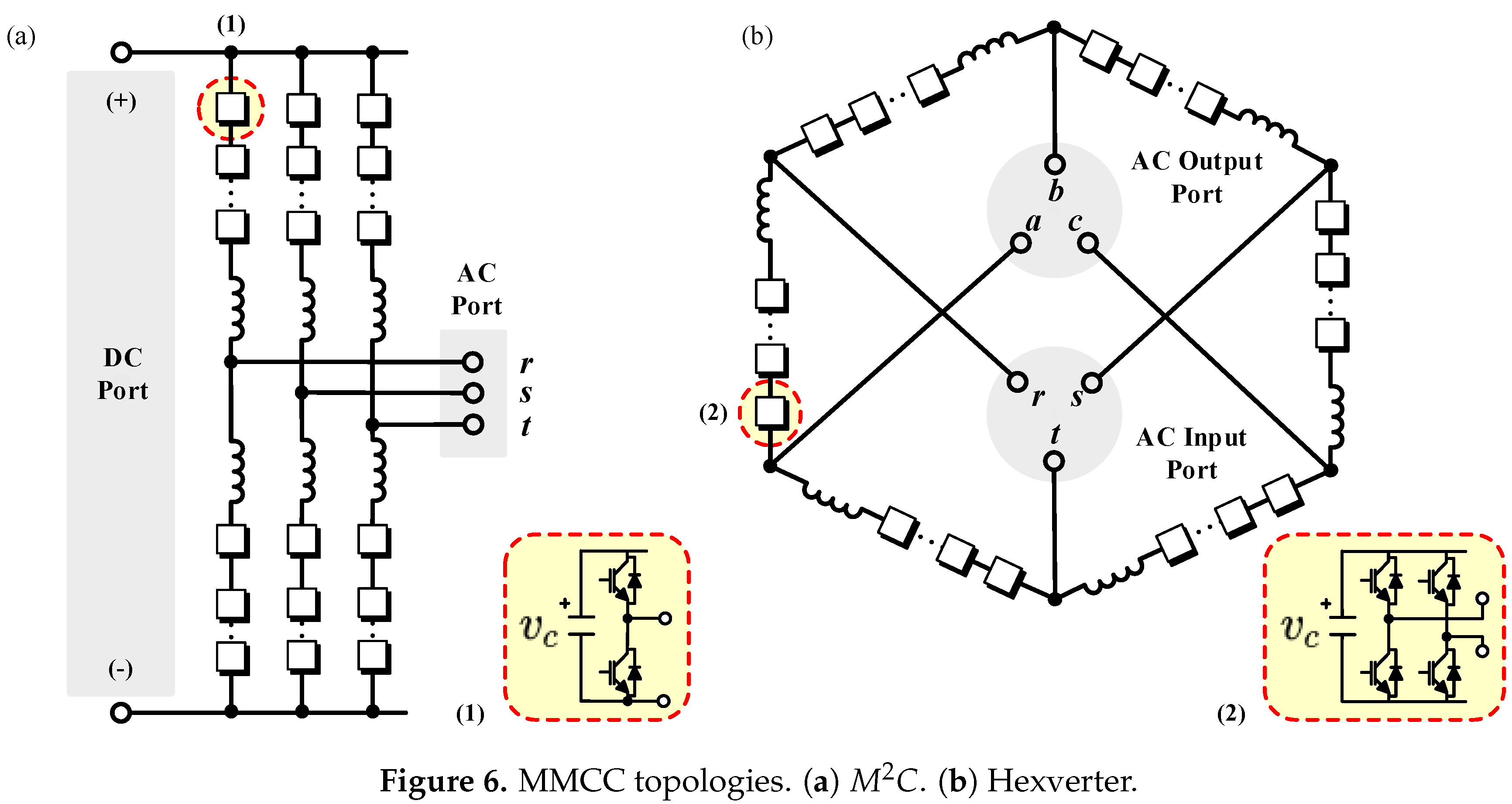
3. Comparison to Others MMCCs
- Nominal power: 10 MVA.
- Input-port voltage: 6 kV and 20 Hz.
- Ouput-port voltage: 6.6 kV and 50 Hz.
- The power-cells operates at 1.7 kV with a 7 mF capacitance.
, and Hexverter Advantages and Disadvantages
4. Applications
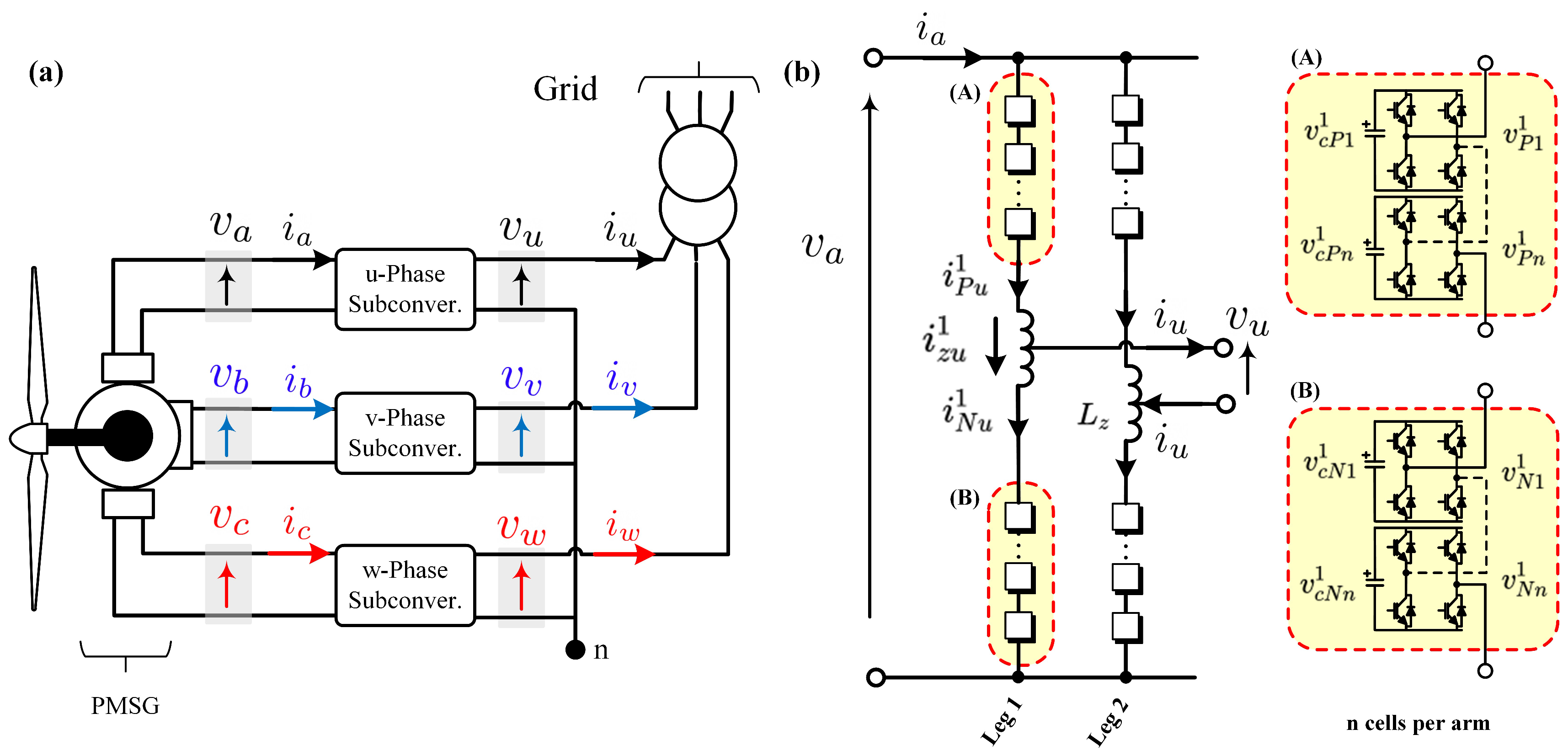
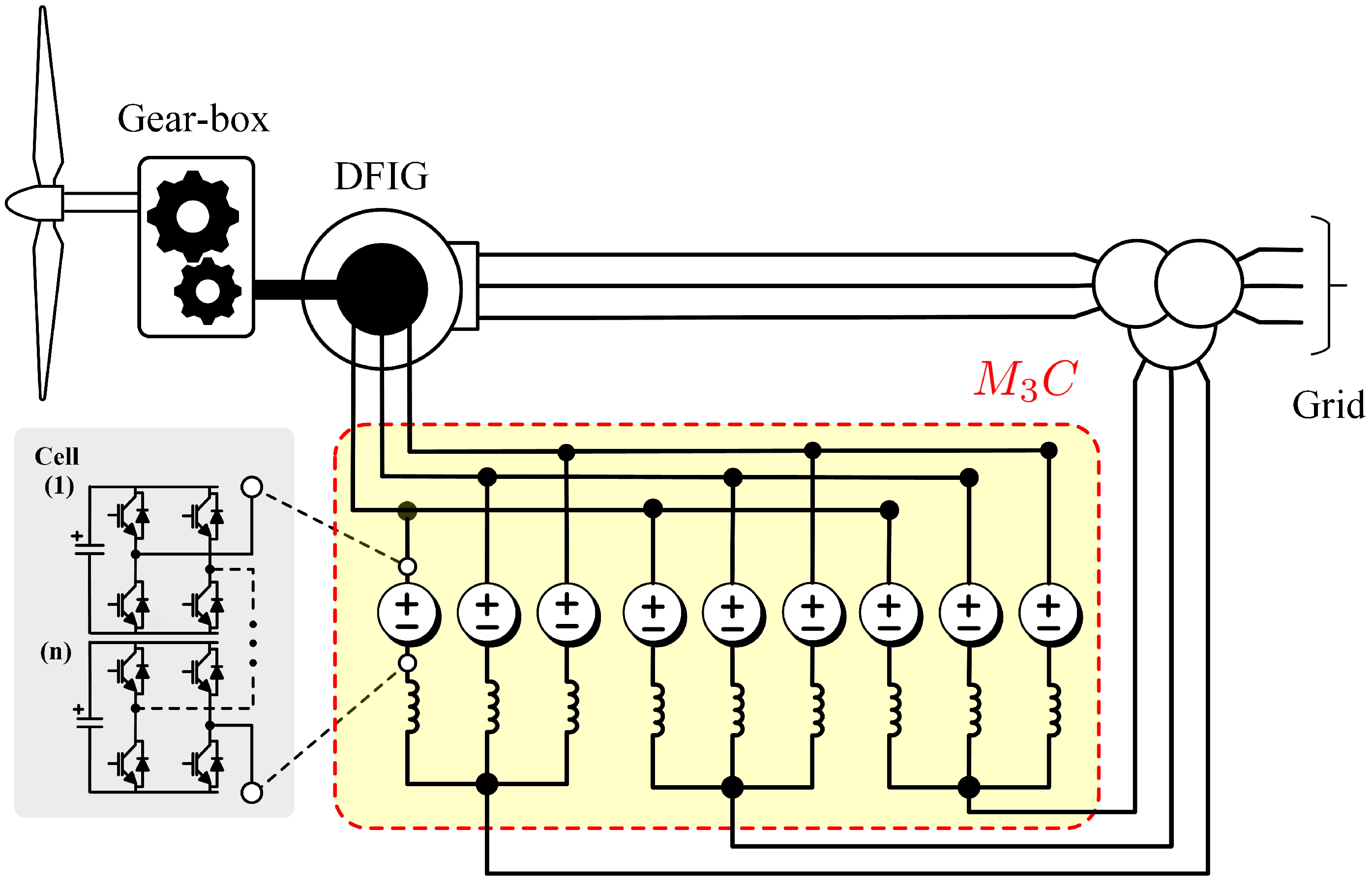
4.1. Wind Energy Conversion Systems
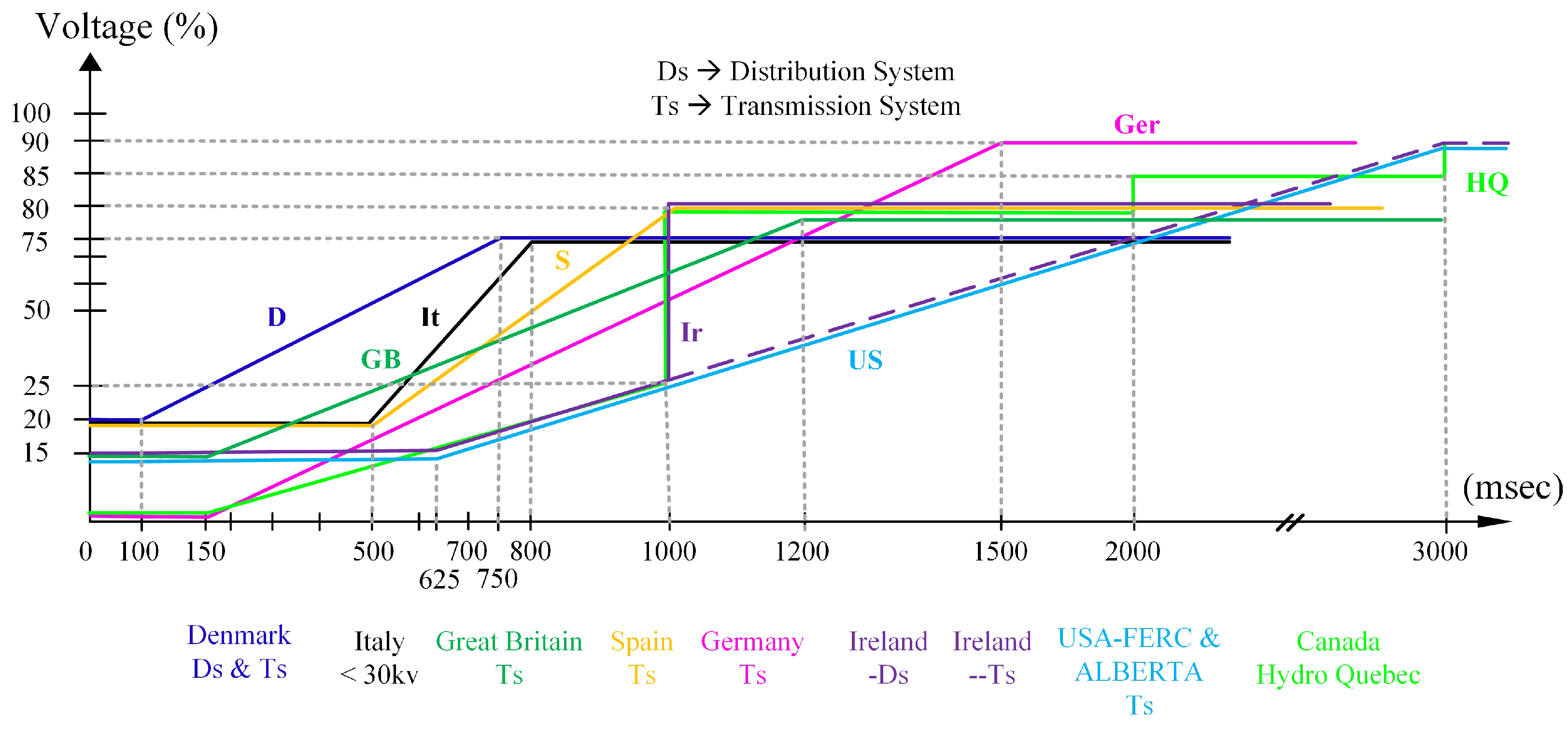
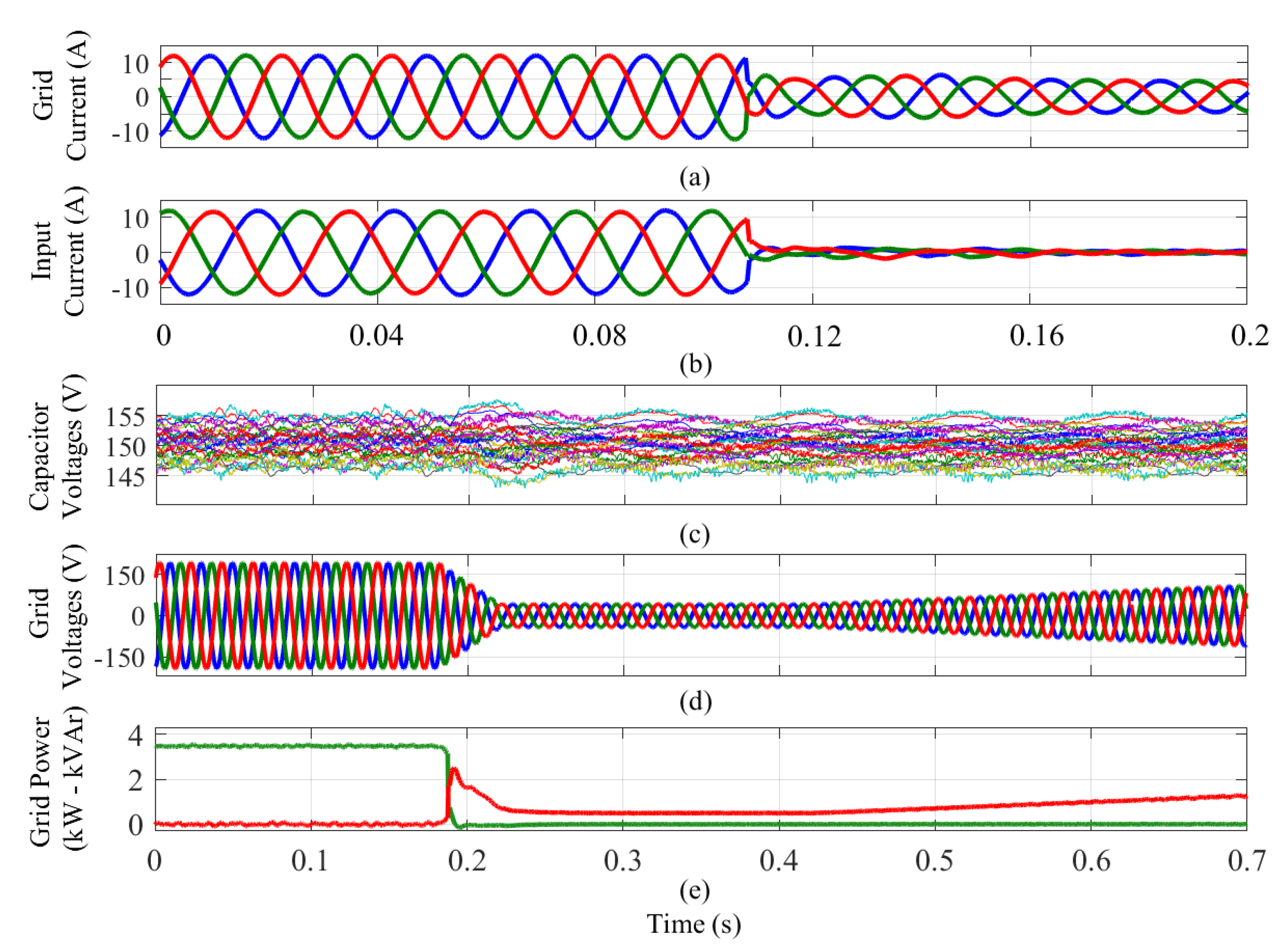
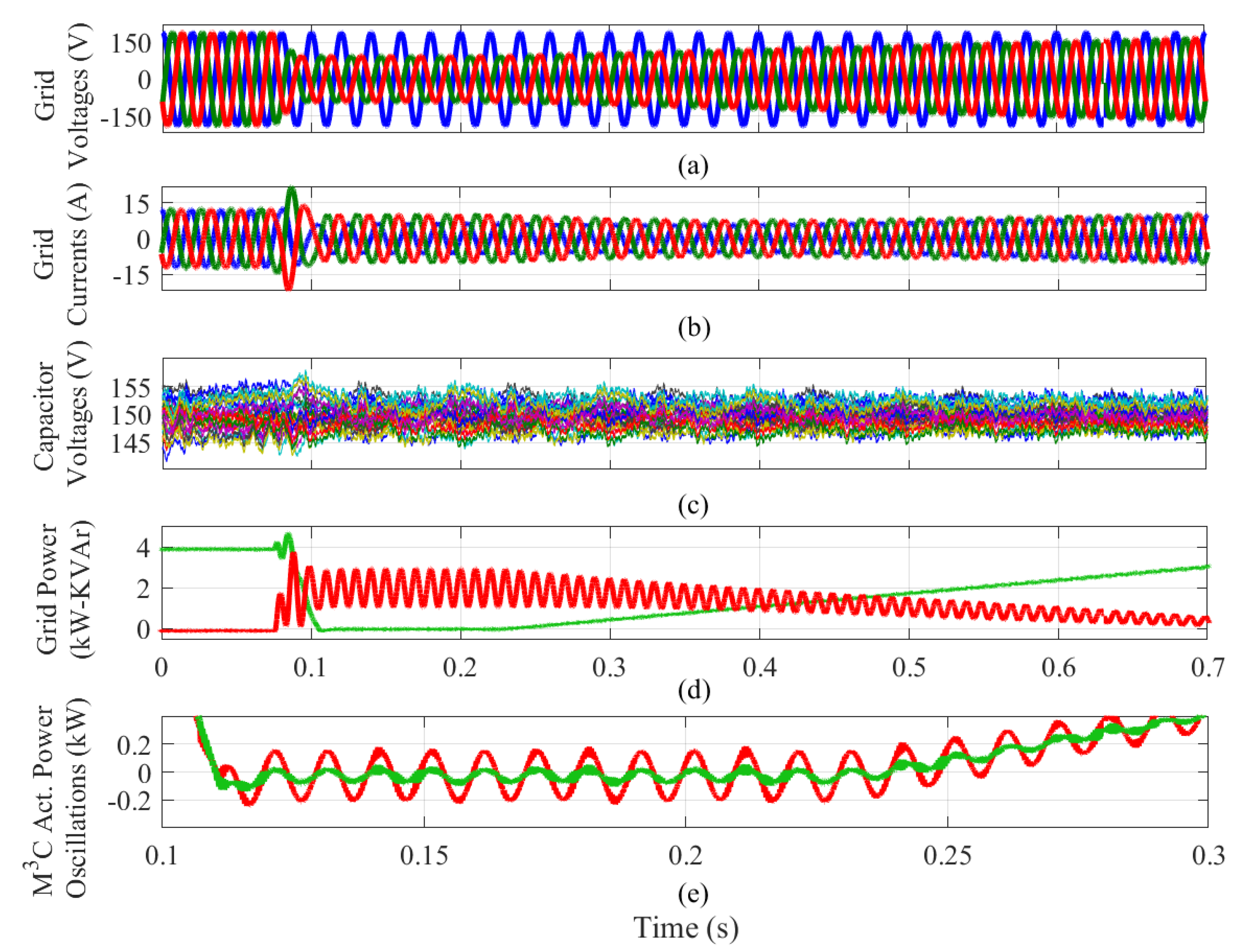
4.2. Low-Voltage Ride-Through Control Considering Permanent Magnet Machines
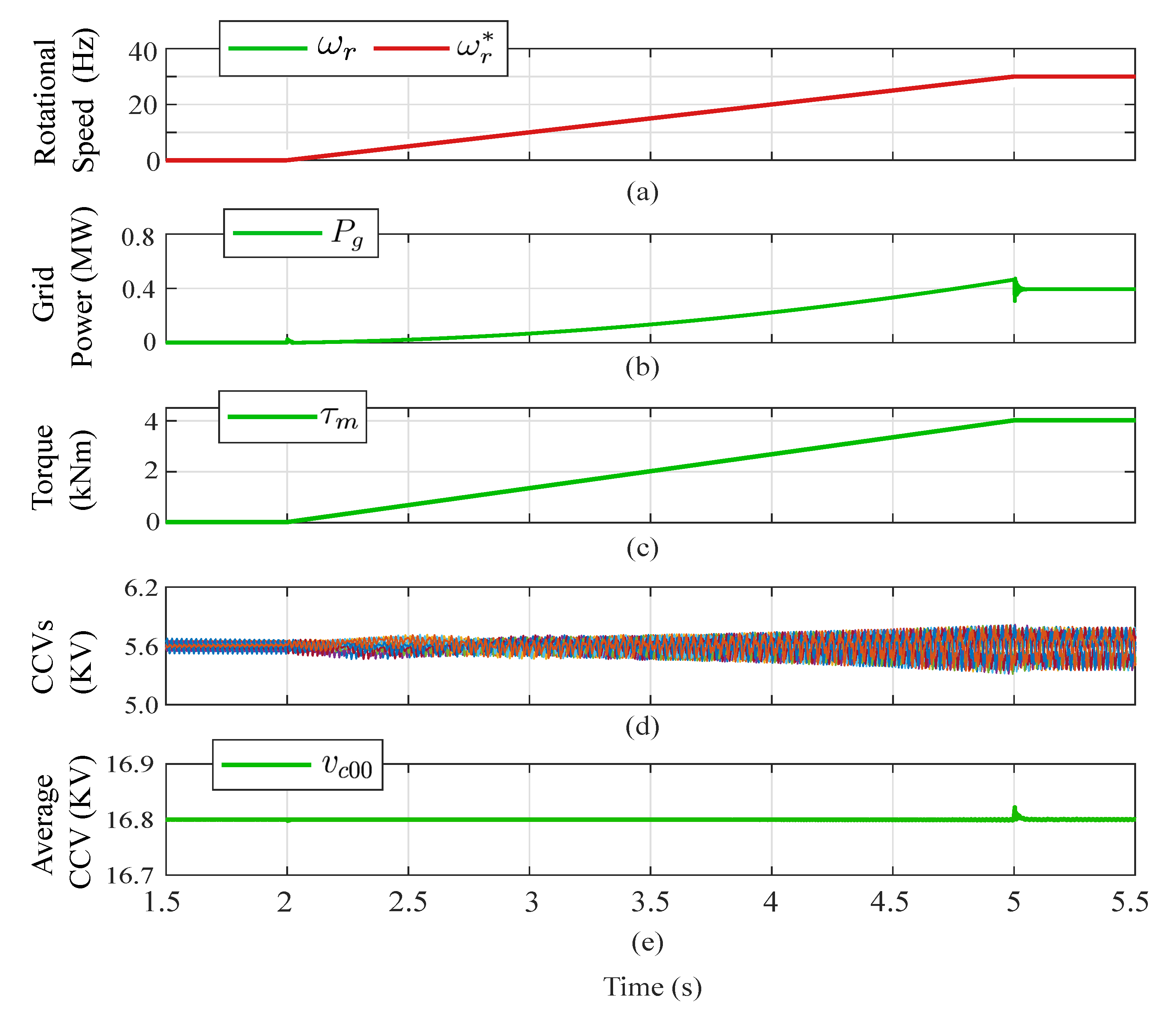
4.3. Variable-Speed Drives
4.4. FACTS
4.5. Low-Frequency AC Transmission Systems
5. Trends and Future Research for the M3C
- Ongoing work on motor-drive applicationsThe use of the in medium-voltage and high-voltage motor-drive applications is foreseen to be expanded. The voltage extensibility of the can be advantageously used to connect electrical machines directly to medium-voltage grids, and then, bulky step-up transformers can be avoided.However, a critical drawback of the in drive applications is to achieve EFM operation without requiring a large over-rating of the converter to provide circulating currents or to accommodate relatively large common-mode voltages. Thus, the development of enhanced mitigation techniques for the regulation of the oscillations in EFM is required. High-performance control strategies, with high bandwidth, reduced circulating current and reduced common-mode voltage references must be further developed [28,58].
- Ongoing work on WECS applicationsThere are still research challenges related to reducing both the volume and weight of the passive components of high-power WECSs, including transformers, inductors and power-cell capacitors typically located in the nacelle. Then, the optimisation of the passive components of the , as preliminarily proposed in [7,17,20,69], could be focused in this aim. For this task, other parameters have to be considered, such as size, weight and volume restrictions of the . The possible transformerless operation of the in large wind turbines could be also exploited.Currently, most of the research proposals are based on type IV PMSG-based WECS. However, different generator- configurations should be analysed. The benefits of the for type III WECSs have been studied but not experimentally verified yet. Moreover, other generators, such as the superconducting synchronous generator, can be interfaced to the grid using the , reaching power ratios of up to 20 MW [81]. As discussed in this paper, applications of the single phase matrix converter for multi-winding generators are also feasible and can be further studied.As the participation of wind energy in power systems increases, it is very likely that more stringent grid-code requirements for WECSs will be used in the coming years. Therefore, based WECSs should be able to provide new grid-supporting functionalities, and issues such as fault ride-through requirements would have significant impacts on the design and operation of modern WECSs. Fault-ride-through strategies such as that presented in [27] must be expanded to provide zero-voltage and over-voltage ride-through, alongside new functionalities to provide ancillary services, such as frequency support, short-circuit power level, voltage variations, flicker and harmonic mitigation.
- LFAC TransmissionThe research revised in this paper shows that promissory applications of the in LFAC transmission systems are possible. However, there is still work to be realised on dimensioning and control of based LFAC systems. On the one hand, the can be used to connect an LFAC system to a 50/60 Hz grid. In this case, the difference among the input and output port frequencies is relatively high, and the capacitor of the power-cells can be designed using a small capacitance value (see Equation (24)). Moreover, the regulation of the voltages in the floating capacitors can be performed using circulating currents of reduced magnitudes, without the requirement of injecting common-mode voltages. Therefore, the cost-effectiveness of the topology is increased by a compact design of the passive components of the . Nevertheless, in this case, hundreds of kilovolts must be handle by the converter, and then efficient power-cell voltage balancing algorithms must be developed. The current methods are not feasible or do not consider the balancing of the voltages within a cluster when the number of power-cells is large [125,126,127].
- Other applicationsRegarding new applications, the could be successfully applied to several industrial processes requiring high-power AC-to-AC conversion. The first possible future application of the is related to new high-power motor-drive applications requiring high torque at zero or low-speed operation. Some of these applications are related to conveyors, kilns, mills and extruders.Other applications of the are related to solid-state transformers. In this case, it would be possible to connect a low-frequency AC port to a medium-frequency AC port. Additionally, as proposed in [56], a single -subconverter can be used with the same purpose of connecting a three-phase, low-frequency and medium-voltage AC port to a single-phase, medium-frequency and low-voltage port. One of the major advantages of using the in such applications is that the can be designed to step-up or step-down the voltage. Additionally, low-capacitance power-cell capacitors are required due to the medium frequency of one of the port. This implies that the difference between the input and the output port frequencies is high, and then small voltage oscillations are generated. Consequently, low circulating currents are required for the regulation of the floating capacitor voltages. Nonetheless, the solid-state transformer operation of the has a significant challenge related to the modulation techniques—synthesising the medium frequency voltage at the output.
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Marquardt, R.; Lesnicar, A. A new modular voltage source inverter topology. In Proceedings of the European Power Electronics Conference (EPE), Toulouse, France, 3–5 September 2013; pp. 1–10. [Google Scholar]
- Marquardt, R. Modular Multilevel Converter: An universal concept for HVDC-Networks and extended DC-bus-applications. In Proceedings of the 2010 International Power Electronics Conference-ECCE Asia, Ankara, Turkey, 21–24 June 2010; pp. 502–507. [Google Scholar]
- Pereira, M.; Retzmann, D.; Lottes, J.; Wiesinger, M.; Wong, G. SVC PLUS: An MMC STATCOM for network and grid access applications. In Proceedings of the 2011 IEEE PES Trondheim PowerTech: The Power of Technology for a Sustainable Society, Trondheim, Norway, 19–23 June 2011; pp. 1–5. [Google Scholar]
- Akagi, H.; Inoue, S.; Yoshii, T. Control and performance of a transformerless cascade PWM STATCOM with star configuration. IEEE Trans. Ind. Appl. 2007, 43, 1041–1049. [Google Scholar] [CrossRef]
- Debnath, S.; Saeedifard, M. A new hybrid modular multilevel converter for grid connection of large wind turbines. IEEE Trans. Sustain. Energy 2013, 4, 1051–1064. [Google Scholar] [CrossRef]
- Vidal-Albalate, R.; Beltran, H.; Rolán, A.; Belenguer, E.; Peña, R.; Blasco-Gimenez, R. Analysis of the Performance of MMC under Fault Conditions in HVDC-Based Offshore Wind Farms. IEEE Trans. Power Deliv. 2016, 31, 839–847. [Google Scholar] [CrossRef]
- Kolb, J.; Kammerer, F.; Braun, M. Dimensioning and design of a modular multilevel converter for drive applications. In Proceedings of the 15th International Power Electronics and Motion Control Conference and Exposition, Novi Sad, Serbia, 4–6 September 2012. [Google Scholar]
- Okazaki, Y.; Kawamura, W.; Hagiwara, M.; Akagi, H.; Ishida, T.; Tsukakoshi, M.; Nakamura, R. Experimental Comparisons Between Modular Multilevel DSCC Inverters and TSBC Converters for Medium-Voltage Motor Drives. IEEE Trans. Power Electron. 2017, 32, 1802–1817. [Google Scholar] [CrossRef]
- Debnath, S.; Qin, J.; Bahrani, B.; Saeedifard, M.; Barbosa, P. Operation, control, and applications of the modular multilevel converter: A review. IEEE Trans. Power Electron. 2015, 30, 37–53. [Google Scholar] [CrossRef]
- Saeedifard, M.; Iravani, R. Dynamic performance of a modular multilevel back-to-back HVDC system. IEEE Trans. Power Deliv. 2010, 25, 2903–2912. [Google Scholar] [CrossRef]
- Glinka, M.; Marquardt, R. A new AC/AC multilevel converter family. IEEE Trans. Ind. Electron. 2005, 52, 662–669. [Google Scholar] [CrossRef]
- Benshaw. Medium voltage Variable Frequency Drive M2L 3000 Series. Available online: https://benshaw.com/wp-content/uploads/2020/01/benshaw-m2l-3000-brochure.pdf (accessed on 10 July 2020).
- Siemens. Sinamics Perfect Harmony GH150. Available online: https://w3.siemens.com/drives/global/en/converter/mv-drives/Documents/technical-data-sheets/sinamics-perfect-harmony-gh150-technical-data-en.pdf (accessed on 5 July 2020).
- Espinoza, M.; Cárdenas, R.; Díaz, M.; Clare, J.C. An Enhanced dq-Based Vector Control System for Modular Multilevel Converters Feeding Variable-Speed Drives. IEEE Trans. Ind. Electron. 2017, 64, 2620–2630. [Google Scholar] [CrossRef]
- Espinoza-B, M.; Cárdenas, R.; Clare, J.; Soto-Sanchez, D.; Diaz, M.; Espina, E.; Hackl, C.M. An Integrated Converter and Machine Control System for MMC-Based High-Power Drives. IEEE Trans. Ind. Electron. 2019, 66, 2343–2354. [Google Scholar] [CrossRef]
- Karwatzki, D.; Baruschka, L.; Mertens, A. Survey on the Hexverter topology - A modular multilevel AC/AC converter. In Proceedings of the 9th International Conference on Power Electronics—ECCE Asia: “Green World with Power Electronics”, Seoul, Korea, 1–5 June 2015; pp. 1075–1082. [Google Scholar]
- Kammerer, F.; Kolb, J.; Braun, M. A novel cascaded vector control scheme for the Modular Multilevel Matrix Converter. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Victoria, Australia, 7–10 November 2011; pp. 1097–1102. [Google Scholar]
- Akagi, H. Classification, terminology, and application of the modular multilevel cascade converter (MMCC). IEEE Trans. Power Electron. 2011, 26, 3119–3130. [Google Scholar] [CrossRef]
- Kucka, J.; Karwatzki, D.; Mertens, A. AC/AC modular multilevel converters in wind energy applications: Design considerations. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 5–9 September 2016; pp. 1–10. [Google Scholar]
- Ilves, K.; Bessegato, L.; Norrga, S. Comparison of cascaded multilevel converter topologies for AC/AC conversion. In Proceedings of the 2014 International Power Electronics Conference, Hiroshima, Japan, 18–21 May 2014; pp. 1087–1094. [Google Scholar]
- Okazaki, Y.; Kawamura, W.; Hagiwara, M.; Akagi, H.; Ishida, T.; Tsukakoshi, M.; Nakamura, R. Which is more suitable for MMCC-based medium-voltage motor drives, a DSCC inverter or a TSBC converter? In Proceedings of the 9th International Conference on Power Electronics—ECCE Asia: “Green World with Power Electronics”, Seoul, Korea, 1–5 June 2015; pp. 1053–1060. [Google Scholar]
- Erickson, R.W.; Al-Naseem, O.A. A new family of matrix converters. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Denver, CO, USA, 29 November–2 December 2001; pp. 1515–1520. [Google Scholar]
- Erickson, R.; Angkititrakul, S.; Almazeedi, K. A New Family of Multilevel Matrix Converters for Wind Power Applications: Final Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2006.
- Angkititrakul, S.; Erickson, R.W. Control and implementation of a new modular matrix converter. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition, Anaheim, CA, USA, 22–26 February 2004; pp. 813–819. [Google Scholar]
- Oates, C. A methodology for developing ‘Chainlink’ converters. In Proceedings of the 13th European Conference on Power Electronics and Applications, Barcelona, Spain, 8–10 September 2009; pp. 1–10. [Google Scholar]
- Akagi, H. Multilevel Converters: Fundamental Circuits and Systems. Proc. IEEE 2017, 105, 2048–2065. [Google Scholar] [CrossRef]
- Diaz, M.; Cardenas, R.; Espinoza, M.; Rojas, F.; Mora, A.; Clare, J.C.; Wheeler, P. Control of Wind Energy Conversion Systems Based on the Modular Multilevel Matrix Converter. IEEE Trans. Ind. Electron. 2017, 64, 8799–8810. [Google Scholar] [CrossRef]
- Diaz, M.; Cardenas, R.; Ibaceta, E.; Mora, A.; Urrutia, M.; Espinoza, M.; Rojas, F.; Wheeler, P. An Overview of Modelling Techniques and Control Strategies for Modular Multilevel Matrix Converters. Energies 2020, 13, 4678. [Google Scholar] [CrossRef]
- Fan, B.; Wang, K.; Wheeler, P.; Gu, C.; Li, Y. A Branch Current Reallocation Based Energy Balancing Strategy for the modular multilevel matrix converter Operating Around Equal Frequency. IEEE Trans. Power Electron. 2018, 33, 1105–1117. [Google Scholar] [CrossRef]
- Kawamura, W.; Chen, K.L.; Hagiwara, M.; Akagi, H. A Low-Speed, High-Torque Motor Drive Using a Modular Multilevel Cascade Converter Based on Triple-Star Bridge Cells (MMCC-TSBC). IEEE Trans. Ind. Appl. 2015, 51, 3965–3974. [Google Scholar] [CrossRef]
- Ibaceta, E.; Diaz, M.; Duran, A.; Rojas, F.; Espinoza, M.; Mora, A. Vector Control of a Modular Multilevel Matrix Converter for Variable-Speed Drive Applications. In Proceedings of the IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies, Valparaiso, Chile, 29–31 October 2019. [Google Scholar]
- Korn, A.J.; Winkelnkemper, M.; Steimer, P.; Kolar, J.W. Direct modular multi-level converter for gearless low-speed drives. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Fan, B.; Wang, K.; Wheeler, P.; Gu, C.; Li, Y. An Optimal Full Frequency Control Strategy for the Modular Multilevel Matrix Converter Based on Predictive Control. IEEE Trans. Power Electron. 2018, 33, 6608–6621. [Google Scholar] [CrossRef]
- Karwatzki, D.; Von Hofen, M.; Baruschka, L.; Mertens, A. Operation of modular multilevel matrix converters with failed branches. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Dallas, TX, USA, 29 October–1 November 2014; pp. 1650–1656. [Google Scholar]
- Perez, M.A.; Bernet, S.; Rodriguez, J.; Kouro, S.; Lizana, R. Circuit topologies, modeling, control schemes, and applications of modular multilevel converters. IEEE Trans. Power Electron. 2015, 30, 4–17. [Google Scholar] [CrossRef]
- Peng, F.Z.; Qian, W.; Cao, D. Recent advances in multilevel converter/inverter topologies and applications. In Proceedings of the 2010 International Power Electronics Conference, Sapporo, Japan, 21–24 June 2010; pp. 492–501. [Google Scholar]
- Behrouzian, E.; Bongiorno, M.; De La Parra, H.Z. An overview of multilevel converter topologies for grid connected applications. In Proceedings of the 2013 15th European Conference on Power Electronics and Applications, Lille, France, 3–5 September 2013; pp. 1–10. [Google Scholar]
- Kawamura, W.; Hagiwara, M.; Akagi, H. Control and Experiment of a Modular Multilevel Cascade Converter Based on Triple-Star Bridge Cells. IEEE Trans. Ind. Appl. 2014, 50, 3536–3548. [Google Scholar] [CrossRef]
- Diaz, M.; Cardenas, R.; Espinoza, M.; Hackl, C.M.; Rojas, F.; Clare, J.C.; Wheeler, P. Vector control of a modular multilevel matrix converter operating over the full output-frequency range. IEEE Trans. Ind. Electron. 2019, 66, 5102–5114. [Google Scholar] [CrossRef]
- Diaz, M.; Espinosa, M.; Rojas, F.; Wheeler, P.; Cardenas, R. Vector control strategies to enable equal frequency operation of the modular multilevel matrix converter. J. Eng. 2019, 2019, 4214–4219. [Google Scholar] [CrossRef]
- Kammerer, F.; Gommeringer, M.; Kolb, J.; Braun, M. Energy balancing of the Modular Multilevel Matrix Converter based on a new transformed arm power analysis. In Proceedings of the 2014 16th European Conference on Power Electronics and Applications, Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar]
- Kawamura, W.; Chiba, Y.; Akagi, H. A Broad Range of Speed Control of a Permanent Magnet Synchronous Motor Driven by a Modular Multilevel TSBC Converter. IEEE Trans. Ind. Appl. 2017, 53, 3821–3830. [Google Scholar] [CrossRef]
- Urrutia, M.; Donoso, F.; Mora, A.; Espina, E.; Diaz, M.; Cardenas, R. Enhanced circulating-current control for the modular multilevel matrix converter based on model predictive control. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications, Genova, Italy, 2–5 September 2019; pp. 1–9. [Google Scholar]
- Kammerer, F.; Kolb, J.; Braun, M. Fully decoupled current control and energy balancing of the Modular Multilevel Matrix Converter. In Proceedings of the 15th International Power Electronics and Motion Control Conference and Exposition, Novi Sad, Serbia, 4–6 September 2012; pp. 3–8. [Google Scholar]
- Leonhard, W. Control of Electrical Drives; Springer: Berlin, Germany, 2001. [Google Scholar]
- Holtz, J. The representation of AC machine dynamics by complex signal flow graphs. IEEE Trans. Ind. Electron. 1995, 42, 263–271. [Google Scholar] [CrossRef]
- Malinowski, M.; Kazmierkowski, M.P.; Trzynadlowski, A.M. A comparative study of control techniques for PWM rectifiers in AC adjustable speed drives. IEEE Trans. Power Electron. 2003, 18, 1390–1396. [Google Scholar] [CrossRef]
- Fan, B.; Wang, K.; Zheng, Z.; Xu, L.; Li, Y. Optimized Branch Current Control of Modular Multilevel Matrix Converters under Branch Fault Conditions. IEEE Trans. Power Electron. 2018, 33, 4578–4583. [Google Scholar] [CrossRef]
- Mora, A.; Urrutia, M.; Cardenas, R.; Angulo, A.; Espinoza, M.; Diaz, M.; Lezana, P. Model-predictive-control-based capacitor voltage balancing strategies for modular multilevel converters. IEEE Trans. Ind. Electron. 2019, 66, 2432–2443. [Google Scholar] [CrossRef]
- Mora, A.; Espinoza, M.; Diaz, M.; Cardenas, R. Model Predictive Control of Modular Multilevel Matrix Converter. In IEEE International Symposium on Industrial Electronics; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2015; Volume 2015, pp. 1074–1079. [Google Scholar]
- Kammerer, F.; Gommeringer, M. K.J.B.M. Overload Capability of the Modular Multilevel Matrix Converter for Feeding High Torque Low Speed Drives. Proc. IET 2014, 20–27. [Google Scholar] [CrossRef]
- Urrutia, M.; Mora, A.; Angulo, A.; Lezana, P.; Cardenas, R.; Diaz, M. A novel Capacitor Voltage Balancing strategy for Modular Multilevel Converters. In Proceedings of the 2017 IEEE Southern Power Electronics Conference, Puerto Varas, Chile, 4–7 December 2017; pp. 1–6. [Google Scholar]
- Yao, W.; Liu, J.; Lu, Z. Distributed Control for the Modular Multilevel Matrix Converter. IEEE Trans. Power Electron. 2019, 34, 3775–3788. [Google Scholar] [CrossRef]
- Melendez, C.; Diaz, M.; Cerda, S.; Rojas, F.; Chavez, H. Frequency support control of a modular multilevel matrix converter based wind energy conversion system. In Proceedings of the 2018—IEEE International Conference on Automation/23rd Congress of the Chilean Association of Automatic Control: Towards an Industry 4.0, Concepcion, Chile, 17–19 October 2019. [Google Scholar]
- Caceres, S.; Rojas, F.; Barbosa, K.; De La Cuadra, T.; Diaz, M.; Gatica, G. Fault detection in triple star bridge cell modular multilevel converter using sliding mode observer. In Proceedings of the IEEE International Conference on Industrial Technology, Buenos Aires, Argentina, 26–28 February 2020; pp. 831–836. [Google Scholar]
- Droguett, G.; Rojas, F.; Arancibia, D.; Diaz, M.; Mirzaeva, G.; Uriarte, M. Nearest level control for a three-phase to single-phase modular multilevel converter for solid state transformers. In Proceedings of the 2018 - IEEE International Conference on Automation/23rd Congress of the Chilean Association of Automatic Control: Towards an Industry 4.0, Concepcion, Chile, 17–19 October 2019. [Google Scholar]
- Kawamura, W.; Hagiwara, M.; Akagi, H.; Tsukakoshi, M.; Nakamura, R.; Kodama, S. AC-Inductors Design for a Modular Multilevel TSBC Converter, and Performance of a Low-Speed High-Torque Motor Drive Using the Converter. IEEE Trans. Ind. Appl. 2017, 53, 4718–4729. [Google Scholar] [CrossRef]
- Kawamura, W.; Chiba, Y.; Hagiwara, M.; Akagi, H. Experimental Verification of an Electrical Drive Fed by a Modular Multilevel TSBC Converter When the Motor Frequency Gets Closer or Equal to the Supply Frequency. IEEE Trans. Ind. Appl. 2017, 53, 2297–2306. [Google Scholar] [CrossRef]
- Duran, A.; Ibaceta, E.; Diaz, M.; Rojas, F.; Cardenas, R.; Chavez, H. Control of a modular multilevel matrix converter for unified power flow controller applications. Energies 2020, 13, 953. [Google Scholar] [CrossRef]
- Kammerer, F.; Brackle, D.; Gommeringer, M.; Schnarrenberger, M.; Braun, M. Operating performance of the modular multilevel matrix converter in drive applications. In Proceedings of the PCIM Europe, Nuremberg, Germany, 19–21 May 2015. [Google Scholar]
- Karwatzki, D.; Baruschka, L.; Kucka, J.; Mertens, A. Current control and branch energy balancing of the Modular Multilevel Matrix Converter. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 6360–6367. [Google Scholar]
- Soto, D.; Borquez, J. Control of a modular multilevel matrix converter for high power applications. Stud. Informatics Control. 2012, 21, 85–92. [Google Scholar] [CrossRef][Green Version]
- Hayashi, Y.; Takeshita, T.; Muneshima, M.; Tadano, Y. Independent control of input current and output voltage for Modular Matrix Converter. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Vienna, Austria, 10–13 November 2013; pp. 888–893. [Google Scholar]
- Xu, Q.; Ma, F.; Luo, A.; He, Z.; Xiao, H. Analysis and Control of M3C-Based UPQC for Power Quality Improvement in Medium/High-Voltage Power Grid. IEEE Trans. Power Electron. 2016, 31, 8182–8194. [Google Scholar] [CrossRef]
- Wang, R.; Lei, D.; Zhao, Y.; Liu, C.; Hu, Y. Modulation strategy of a 3 × 5 modular multilevel matrix converter. Energies 2018, 11, 464. [Google Scholar] [CrossRef]
- Tu, Q.; Xu, Z.; Huang, H.; Zhang, J. Parameter design principle of the arm inductor in modular multilevel converter based HVDC. In Proceedings of the 2010 International Conference on Power System Technology: Technological Innovations Making Power Grid Smarter, Hawaii, HI, USA, 15–17 June 2010. [Google Scholar]
- Utvić, M.; Lobos, I.P.; Dujić, D. Low voltage modular multilevel converter submodule for medium voltage applications. In Proceedings of the PCIM Europe Conference, Nuremberg, Germany, 7–9 May 2019; pp. 424–431. [Google Scholar]
- Unruh, R.; Schafmeister, F.; Fröhleke, N.; Böcker, J. MMC-topology for high-current and low-voltage applications with minimal number of submodules, reduced switching and capacitor losses. In Proceedings of the PCIM Europe Conference, Nuremberg, Germany, 7–9 May 2019. [Google Scholar]
- Kammerer, F.; Kolb, J.; Braun, M. Optimization of the passive components of the modular multilevel matrix converter for drive applications. In Proceedings of the PCIM Europe Conference, Nuremberg, Germany, 8–10 May 2012; pp. 702–709. [Google Scholar]
- Chen, Y.; Li, Z.; Zhao, S.; Wei, X.; Kang, Y. Design and Implementation of a Modular Multilevel Converter with Hierarchical Redundancy Ability for Electric Ship MVDC System. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 189–202. [Google Scholar] [CrossRef]
- Espinoza, M.; Cárdenas, R.; Díaz, M.; Mora, A.; Soto, D. Modelling and control of the modular multilevel converter in back to back configuration for high power induction machine drives. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Florence, Italy, 24–27 October 2016; pp. 5046–5051. [Google Scholar]
- Espinoza, M.; Espina, E.; Diaz, M.; Mora, A.; Cardenas, R. Improved control strategy of the modular multilevel converter for high power drive applications in low frequency operation. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications (EPE’16 ECCE Europe), Karlsruhe, Germany, 6–8 September 2016; pp. 1–10. [Google Scholar]
- Gan, C.; Sun, Q.; Wu, J.; Kong, W.; Shi, C.; Hu, Y. MMC-Based SRM Drives with Decentralized Battery Energy Storage System for Hybrid Electric Vehicles. IEEE Trans. Power Electron. 2019, 34, 2608–2621. [Google Scholar] [CrossRef]
- Quraan, M.; Tricoli, P.; D’Arco, S.; Piegari, L. Efficiency Assessment of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2017, 32, 2041–2051. [Google Scholar] [CrossRef]
- Fujita, H.; Tominaga, S.; Akagi, H. Analysis and design of a DC voltage-controlled static var compensator using quad-series voltage-source inverters. IEEE Trans. Ind. Appl. 1996, 32, 970–978. [Google Scholar] [CrossRef]
- Hagiwara, M.; Hasegawa, I.; Akagi, H. Start-up and low-speed operation of an electric motor driven by a modular multilevel cascade inverter. IEEE Trans. Ind. Appl. 2013, 49, 1556–1565. [Google Scholar] [CrossRef]
- Kolb, J.; Kammerer, F.; Gommeringer, M.; Braun, M. Cascaded control system of the modular multilevel converter for feeding variable-speed drives. IEEE Trans. Power Electron. 2015, 30, 349–357. [Google Scholar] [CrossRef]
- Kawamura, W.; Chiba, Y.; Hagiwara, M.; Akagi, H. Experimental verification of TSBC-based electrical drives when the motor frequency is passing through, or equal to, the supply frequency. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition, Montreal, QC, Canada, 20–24 September 2015; pp. 5490–5497. [Google Scholar]
- Miura, Y.; Mizutani, T.; Ito, M.; Ise, T. Modular multilevel matrix converter for low frequency AC transmission. In Proceedings of the International Conference on Power Electronics and Drive Systems, Kitakyushu, Japan, 22–25 April 2013; pp. 1079–1084. [Google Scholar]
- Global Wind Energy Council. Global Wind Statistics: Brussels, Belgium; Global Wind Energy Council: Brussels, Belgium, 2020. [Google Scholar]
- European Wind Energy Association. UpWind Design Limits and Solutions for Very Large Wind Turbines; European Wind Energy Association: Brussels, Belgium, 2016. [Google Scholar]
- General Electric, Co. Haliade-X 12 MW Offshore Wind Turbine Platform; General Electric: San Jose, CA, USA, 2020. [Google Scholar]
- Liserre, M.; Cárdenas, R.; Molinas, M.; Rodríguez, J. Overview of multi-MW wind turbines and wind parks. IEEE Trans. Ind. Electron. 2011, 58, 1081–1095. [Google Scholar] [CrossRef]
- Blaabjerg, F.; Ma, K. Future on Power Electronics for Wind Turbine Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 139–152. [Google Scholar] [CrossRef]
- Yaramasu, V.; Wu, B.; Sen, P.C.; Kouro, S.; Narimani, M. High-power wind energy conversion systems: State-of-the-art and emerging technologies. Proc. IEEE 2015, 103, 740–788. [Google Scholar] [CrossRef]
- Melendez, C.; Diaz, M.; Rojas, F.; Cardenas, R.; Espinoza, M. Control of a Double Fed Induction Generator based Wind Energy Conversion System equipped with a Modular Multilevel Matrix Converter. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–11. [Google Scholar]
- Díaz, M.; Cárdenas, R.; Mauricio Espinoza, B.; Mora, A.; Rojas, F. A novel LVRT control strategy for modular multilevel matrix converter based high-power wind energy conversion systems. In Proceedings of the 2015 10th International Conference on Ecological Vehicles and Renewable Energies, Monte-Carlo, Monaco, 31 March–4 April 2015; pp. 1–11. [Google Scholar]
- Diaz, M.; Cárdenas, R.; Espinoza, M.; Mora, A.; Wheeler, P. Modelling and control of the modular multilevel matrix converter and its application to wind energy conversion systems. In Proceedings of the IECON Proceedings (Industrial Electronics Conference), Florence, Italy, 24–27 October 2016; pp. 5052–5057. [Google Scholar]
- Diaz, M.; Espinoza, M.; Mora, A.; Cardenas, R.; Wheeler, P. The application of the modular multilevel matrix converter in high-power wind turbines. In Proceedings of the 2016 18th European Conference on Power Electronics and Applications, Karlsruhe, Germany, 5–9 September 2016. [Google Scholar]
- Thitichaiworakorn, N.; Hagiwara, M.; Akagi, H. A Medium-Voltage Large Wind Turbine Generation System Using an AC/AC Modular Multilevel Cascade Converter. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 534–546. [Google Scholar] [CrossRef]
- Kammerer, F.; Gommeringer, M.; Kolb, J.; Braun, M. Benefits of operating Doubly Fed Induction Generators by Modular Multilevel Matrix Converters. In Proceedings of the PCIM Europe Conference Proceedings, Nuremberg, Germany, 14–16 May 2013; pp. 1149–1156. [Google Scholar]
- Diaz, M.; Rojas, F.; Donoso, F.; Cardenas, R.; Espinoza, M.; Mora, A.; Wheeler, P. Control of modular multilevel cascade converters for offshore wind energy generation and transmission. In Proceedings of the 2018 13th International Conference on Ecological Vehicles and Renewable Energies, Monte-Carlo, Monaco, 10–12 April 2018; pp. 1–10. [Google Scholar]
- Yuan, X. A set of multilevel modular medium-voltage high power converters for 10-MW wind turbines. IEEE Trans. Sustain. Energy 2014, 5, 524–534. [Google Scholar] [CrossRef]
- Andresen, B.; Birk, J. A high power density converter system for the Gamesa G10x 4,5 MW wind turbine. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–8. [Google Scholar]
- Ma, F.; Xu, Q.; He, Z.; Tu, C.; Shuai, Z.; Luo, A.; Li, Y. A Railway Traction Power Conditioner Using Modular Multilevel Converter and Its Control Strategy for High-Speed Railway System. IEEE Trans. Transp. Electrif. 2016, 2, 96–109. [Google Scholar] [CrossRef]
- Iov, F.; Hansen, A.D.; Sørensen, P.; Cutululis, N.A. Mapping of Grid Faults and Grid Codes; Technical Report; Technical University of Denmark: Roskilde, Denmark, 2007. [Google Scholar]
- Wu, Y.; Chang, S.; Mandal, P. Grid-Connected Wind Power Plants: A Survey on the Integration Requirements in Modern Grid Codes. IEEE Trans. Ind. Appl. 2019, 55, 5584–5593. [Google Scholar] [CrossRef]
- Liu, S.; Saeedifard, M.; Wang, X. Analysis and control of the modular multilevel matrix converter under unbalanced grid conditions. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1979–1989. [Google Scholar] [CrossRef]
- Cárdenas, R.; Díaz, M.; Rojas, F.; Clare, J.; Wheeler, P. Resonant control system for low-voltage ride-through in wind energy conversion systems. IET Power Electron. 2016, 9, 1297–1305. [Google Scholar] [CrossRef]
- Díaz, M.; Cárdenas, R.; Rojas, F.; Clare, J. 3-Phase 4-wire matrix converter-based voltage sag/swell generator to test low-voltage ride through in wind energy conversion systems. IET Power Electron. 2014, 7, 3116–3125. [Google Scholar] [CrossRef]
- IHS Markit. Medium Voltage Drives Report-2017; Technical Report; IHS: Englewood, CO, USA, 2017. [Google Scholar]
- Abu-Rub, H.; Bayhan, S.; Moinoddin, S.; Malinowski, M.; Guzinski, J. Medium-Voltage Drives: Challenges and existing technology. IEEE Power Electron. Mag. 2016, 3, 29–41. [Google Scholar] [CrossRef]
- Donoso, F.; Mora, A.; Espinoza, M.; Urrutia, M.; Espina, E.; Cardenas, R. Predictive-based Modulation Schemes for the Hybrid Modular Multilevel Converter. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications (EPE ’19 ECCE Europe), Genova, Italy, 2–5 September 2019. [Google Scholar]
- Meynard, T.A.; Foch, H. Multi-level conversion: high voltage choppers and voltage-source inverters. In Proceedings of the 23rd Annual IEEE Power Electronics Specialists Conference, Toledo, Spain, 29 June–3 July 1992; pp. 397–403. [Google Scholar]
- Hammond, P.W. A new approach to enhance power quality for medium voltage AC drives. IEEE Trans. Ind. Appl. 1997, 33, 202–208. [Google Scholar] [CrossRef]
- Soto-Sanchez, D.E.; Pena, R.; Cardenas, R.; Clare, J.; Wheeler, P. A cascade multilevel frequency changing converter for high-power applications. IEEE Trans. Ind. Electron. 2013, 60, 2118–2130. [Google Scholar] [CrossRef]
- Zeng, R.; Xu, L.; Yao, L.; Williams, B.W. Design and operation of a hybrid modular multilevel converter. IEEE Trans. Power Electron. 2015, 30, 1137–1146. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Xu, D.; Finney, S.J.; Williams, B.W. A Hybrid Modular Multilevel Converter for Medium-Voltage Variable-Speed Motor Drives. IEEE Trans. Power Electron. 2017, 32, 4619–4630. [Google Scholar] [CrossRef]
- Li, R.; Adam, G.P.; Holliday, D.; Fletcher, J.E.; Williams, B.W. Hybrid Cascaded Modular Multilevel Converter with DC Fault Ride-Through Capability for the HVDC Transmission System. IEEE Trans. Power Deliv. 2015, 30, 1853–1862. [Google Scholar] [CrossRef]
- Diaz, M.; Ibaceta, E.; Duran, A.; Melendez, C.; Urrutia, M.; Rojas, F. Field oriented control of a modular multilevel matrix converter based variable speed drive. In Proceedings of the 2019 21st European Conference on Power Electronics and Applications, EPE 2019 ECCE Europe, Genova, Italy, 2–5 September 2019. [Google Scholar]
- Kotsampopoulos, P.; Georgilakis, P.; Lagos, D.T.; Kleftakis, V.; Hatziargyriou, N. Facts providing grid services: Applications and testing. Energies 2019, 12, 2554. [Google Scholar] [CrossRef]
- Hingorani, N.G.; Gyugyi, L. Understanding FACTS: Concepts and Technology of Flexible AC Transmission Systems; Wiley-IEEE Press: New York, NY, USA, 2000. [Google Scholar]
- Zhang, X.P.; Handschin, E.; Yao, M. Multi-control functional static synchronous compensator (STATCOM) in power system steady-state operations. Electr. Power Syst. Res. 2004, 72, 269–278. [Google Scholar] [CrossRef]
- Sen, K.K. SSSC—Static Synchronous Series Compensator: Theory, modeling, and applications. IEEE Trans. Power Deliv. 1998, 13, 241–246. [Google Scholar] [CrossRef]
- Zhuo, G.; Jiang, D.; Lian, X. Modular multilevel converter for unified power flow controller application. In Proceedings of the 2012 3rd International Conference on Digital Manufacturing and Automation, Guilin, China, 31 July–2 August 2012. [Google Scholar]
- Liu, J.; Xu, Z.; Xiao, L. Comprehensive power flow analyses and novel feedforward coordination control strategy for MMC-based UPFC. Energies 2019, 12, 824. [Google Scholar] [CrossRef]
- Li, P.; Wang, Y.; Feng, C.; Lin, J. Application of MMC-UPFC in the 500 kV power grid of Suzhou. J. Eng. 2017, 2017, 2514–2518. [Google Scholar] [CrossRef]
- Duran, A.; Diaz, M.; Ibaceta, E.; Rojas, F.; Wheeler, P. Direct Power Control of Modular Multilevel Matrix Converter for Flexible AC Transmission System Applications. In Proceedings of the IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies, Valparaiso, Chile, 29–31 October 2019. [Google Scholar]
- Funaki, T.; Matsuura, K. Feasibility of the low frequency AC transmission. In Proceedings of the 2000 IEEE Power Engineering Society, Singapore, 23–27 January 2000; pp. 2693–2698. [Google Scholar]
- Fischer, W.; Braun, R.; Erlich, I. Low frequency high voltage offshore grid for transmission of renewable power. In Proceedings of the IEEE PES Innovative Smart Grid Technologies Conference Europe, Berlin, Germany, 14–17 October 2012. [Google Scholar]
- Erlich, I.; Shewarega, F.; Wrede, H.; Fischer, W. Low frequency AC for offshore wind power transmission-prospects and challenges. In Proceedings of the IET Seminar Digest. Institution of Engineering and Technology, Birmingham, UK, 10–12 February 2015. [Google Scholar]
- Ngo, T.; Lwin, M.; Santoso, S. Steady-State Analysis and Performance of Low Frequency AC Transmission Lines. IEEE Trans. Power Syst. 2016, 31, 3873–3880. [Google Scholar] [CrossRef]
- Yuan, C.; Zhou, R.; Tong, M. Topologies and control of low-frequency alternating current for offshore wind farms based on modular multilevel matrix converter. J. Eng. 2019, 2019, 2271–2277. [Google Scholar] [CrossRef]
- Ma, J.; Dahidah, M.; Pickert, V.; Yu, J. Modular multilevel matrix converter for offshore low frequency AC transmission system. In Proceedings of the IEEE International Symposium on Industrial Electronics, Edinburgh, UK, 19–21 June 2017; pp. 768–774. [Google Scholar]
- Huang, L.; Yang, X.; Zhang, B.; Qiao, L.; Li, H.; Tian, M. Hierarchical model predictive control of modular multilevel matrix converter for low frequency AC transmission. In Proceedings of the 9th International Conference on Power Electronics—ECCE Asia: “Green World with Power Electronics”, Seoul, Korea, 1–5 June 2015; pp. 927–933. [Google Scholar]
- Liu, S.; Wang, X.; Meng, Y.; Sun, P.; Luo, H.; Wang, B. A decoupled control strategy of modular multilevel matrix converter for fractional frequency transmission system. IEEE Trans. Power Deliv. 2017, 32, 2111–2121. [Google Scholar] [CrossRef]
- Al-Tameemi, M.; Miura, Y.; Liu, J.; Bevrani, H.; Ise, T. A novel control scheme for multi-terminal low-frequency AC electrical energy transmission systems using modular multilevel matrix converters and virtual synchronous generator concept. Energies 2020, 13, 747. [Google Scholar] [CrossRef]
- Talon, E.L.; Gavin, S.; Siemaszko, D.; Biya-Motto, F.; Essimbi, B.Z.; Carpita, M. Design and implementation of a multi-dsp based digital control system architecture for modular multilevel converters. In Proceedings of the 2016 IEEE International Power Electronics and Motion Control Conference, Varna, Bulgaria, 22–26 May 2016; pp. 1182–1187. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Paper Title | Year | Experimental Validation | Ref. | Paper Title | Year | Experimental Validation |
|---|---|---|---|---|---|---|---|
| [62] | Control of a Modular Multilevel Matrix Converter for High Power Applications | 2012 | 1 cell per cluster Subconverter | [57] | AC-Inductors Design for a Modular Multilevel TSBC Converter and Performance of a Low-Speed High-Torque Motor Drive Using the Converter | 2017 | 4 cells per cluster 15 kVA |
| [38] | Control and Experiment of a Modular Multilevel Cascade Converter Based on Triple-Star Bridge Cells | 2014 | 4 cells per cluster 15 kVA | [29] | A Branch Current Reallocation Based Energy Balancing Strategy for the Modular Multilevel Matrix Converter Operating Around Equal Frequency | 2018 | 1 cell per cluster low power |
| [63] | Independent Control of Input Current, Output Voltage, and Capacitor Voltage Balancing for a Modular Matrix Converter | 2015 | 3 cells per cluster 3 kVA | [33] | An Optimal Full Frequency Control Strategy for the Modular Multilevel Matrix Converter Based on Predictive Control | 2018 | 3 cells per cluster 2.2 kVA |
| [30] | A Low-Speed, High-Torque Motor Drive Using a Modular Multilevel Cascade Converter Based on Triple-Star Bridge Cells (MMCC-TSBC) | 2015 | 4 cells per cluster 15 kVA | [48] | Optimized Branch Current Control of Modular Multilevel Matrix Converters under Branch Fault Conditions | 2018 | 3 cells per cluster ≈ 8 kVA |
| [64] | Analysis and Control of M3C-Based UPQC for Power Quality Improvement in Medium/High-Voltage Power Grid | 2016 | 3 cells per cluster 8 kVA | [65] | Modulation Strategy of a 3 × 5 Modular Multilevel Matrix Converter | 2018 | 3 cells per cluster |
| [42] | A Broad Range of Speed Control of a Permanent Magnet Synchronous Motor Driven by a Modular Multilevel TSBC Converter | 2017 | 4 cells per cluster 15 kVA | [39] | Vector Control of a Modular Multilevel Matrix Converter Operating Over the Full Output-Frequency Range | 2019 | 3 cells per cluster 5 kVA |
| [58] | Experimental Verification of an Electrical Drive Fed by a Modular Multilevel TSBC Converter When the Motor Frequency Gets Closer or Equal to the Supply Frequency | 2017 | 4 cells per cluster 15 kVA | [53] | Distributed Control for the Modular Multilevel Matrix Converter | 2019 | 3 cells per cluster 3.6 kVA |
| [27] | Control of Wind Energy Conversion Systems Based on the Modular Multilevel Matrix Converter | 2017 | 3 cells per cluster 4 kVA | [40] | Vector control strategies to enable equal frequency operation of the modular multilevel matrix converter | 2019 | 3 cells per cluster ≈ 5 kVA |
| [8] | Experimental Comparisons Between Modular Multilevel DSCC Inverters and TSBC Converters for Medium-Voltage Motor Drives | 2017 | 4 cells per cluster 15 kVA | [59] | Control of a Modular Multilevel Matrix Converter for Unified Power Flow Controller Applications | 2020 | 3 cells per cluster 5 kVA |
| Converter | Number of Power-Cells | UCC | DFM | EFM | Circulating Currents | |
|---|---|---|---|---|---|---|
| Hexverter | 42 FB | 37 | 43.2 ms | ++ | - | 1 |
| Back-to-Back | 84 HB | 24 | 86.5 ms | + | +++ | 4 |
| 63 FB | 32 | 64.8 ms | +++ | ++ | 4 |
| Converter | Advantages | Disadvantages | Proposed Applications |
|---|---|---|---|
| Hexverter | – Low component count | – Low control flexibility | – WECSs |
| – High oscillations in EFM | – LFAC transmission | ||
| – Excellent behaviour in EFM | – High CCV oscillations in low-frequency applications | – Widely used in HVDC | |
| – Well established technology | – High component count in back-to-back configuration | – Motor drives with low starting torque | |
| – Low semiconductor count | |||
| – High control flexibility | – High component count | – WECSs | |
| – Fault-tolerance | – High oscillations EFM | – Motor drives with high starting torque | |
| – Excellent behaviour in DFM | – LFAC transmission |
| Attribute | M3C | M2C | Hexverter | BTB M2C | Hybrid M2C |
|---|---|---|---|---|---|
| Circulating Currents | 4 | 2 | 1 | 4 (2 each side) | 4 (2 each side) |
| Common Mode Voltage | Yes | Yes | Yes | Yes | Yes |
| DC-link Voltage Variation | N.A. | Usually No | N.A. | No | Yes |
| Degrees of Freedom | 5 | 3 | 2 | 6 (3 each side) | 7 |
| Reported Applications | Drives, WECSs | Drives, HVDC | Steel mills [26] | HVDC, Drives | HVDC, Drives |
| M3C Parameters | IM Parameters | ||
|---|---|---|---|
| Nominal Power | 1 | Output power | 1250 |
| Cells per branch | 7 | Line-to-line voltage | 4160 |
| Input Voltage/Freq. | 3.00 /50 | Stator current | 150 |
| Cluster Inductor | 1.3 | Rated speed | 1189 rpm |
| Single cell C | 4 | Rated torque | 7490 |
| Capacitor Voltage | 0.8 | ||
| inertia index H | 80.64 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diaz, M.; Cárdenas Dobson, R.; Ibaceta, E.; Mora, A.; Urrutia, M.; Espinoza, M.; Rojas, F.; Wheeler, P. An Overview of Applications of the Modular Multilevel Matrix Converter. Energies 2020, 13, 5546. https://doi.org/10.3390/en13215546
Diaz M, Cárdenas Dobson R, Ibaceta E, Mora A, Urrutia M, Espinoza M, Rojas F, Wheeler P. An Overview of Applications of the Modular Multilevel Matrix Converter. Energies. 2020; 13(21):5546. https://doi.org/10.3390/en13215546
Chicago/Turabian StyleDiaz, Matias, Roberto Cárdenas Dobson, Efrain Ibaceta, Andrés Mora, Matias Urrutia, Mauricio Espinoza, Felix Rojas, and Patrick Wheeler. 2020. "An Overview of Applications of the Modular Multilevel Matrix Converter" Energies 13, no. 21: 5546. https://doi.org/10.3390/en13215546
APA StyleDiaz, M., Cárdenas Dobson, R., Ibaceta, E., Mora, A., Urrutia, M., Espinoza, M., Rojas, F., & Wheeler, P. (2020). An Overview of Applications of the Modular Multilevel Matrix Converter. Energies, 13(21), 5546. https://doi.org/10.3390/en13215546