1. Introduction
Global climate changes are rapidly transforming into more fatal and complex environmental disasters, happening all around the world. Abundant emission of hazardous gases form coal fired energy plants is one such kind of severe climate change. That is why the world energy paradigm is shifting from existing hazardous gas emission energy plant to finding new renewable and clean energy sources (such as photo-voltaic solar cells, nuclear energy, and ocean energy, etc.). The basic aim of this research article is to propose an initial concept related to energy harvesting from water waves devices. Moreover, this study has potential benefits in the field of underwater under-actuated robotic arm system.
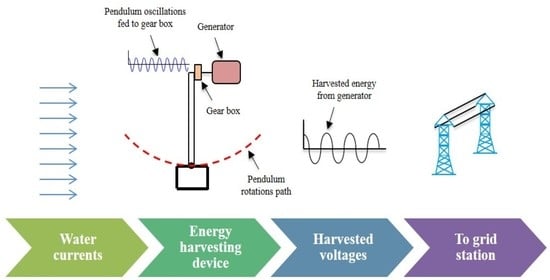
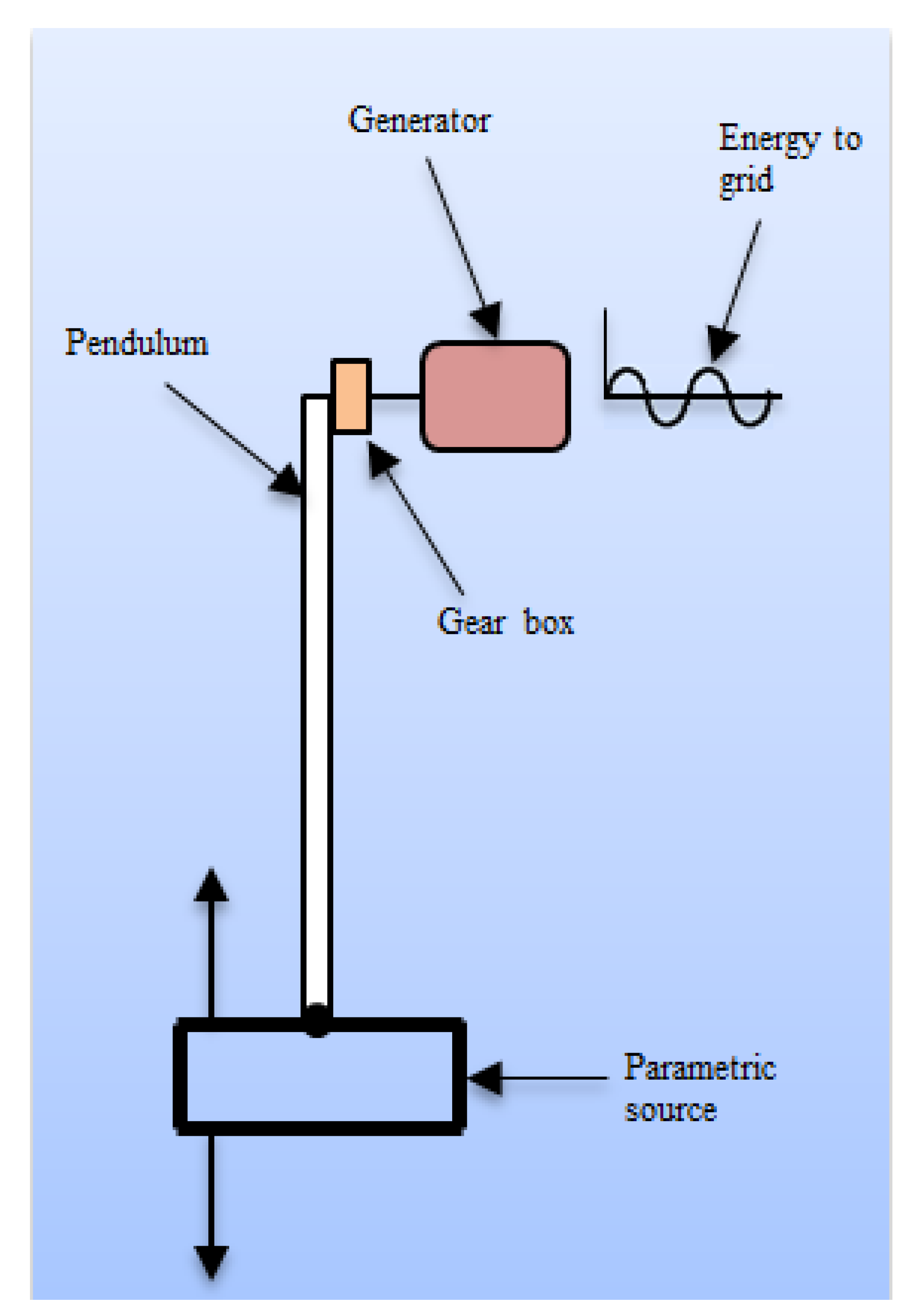
In this article, the dynamic response characteristics of an inverted pendulum system in viewpoint of a future wave energy harvesting device in an underwater environment are discussed. The problems associated with the dynamic response and parametric excitation control of the pendulum system are also addressed. Simple water waves are simulated through the concept of parametric excitations. Parametric excitation phenomena are widely used in the control design of various mechanical and electrical dynamical systems. Moreover, nowadays, parametrically excited pendulum systems are getting a huge attention in the development of wave energy converters and in various kind of energy harvesting devices. It is believed that wave energy can be successfully harvested if pivot point of an inverted pendulum system oscillates at a constant speed. This pivot point, oscillating with a constant speed in the horizontal direction will be attached to a generator. The attached generator will then produce electrical energy.
Figure 1 shows the proposed conceptual schematic diagram of the wave energy harvesting system.
It is already known that the dynamic response behavior and stability control of a system in water is different than in vacuum [
1]. The mathematical analysis and simulation of underwater systems can be very useful for understanding their physical characteristics. All underwater systems experience hydrodynamic forces during their operations, and these forces cause problems in their control and stabilization. That is why parametric excitations cannot be directly applied successfully in water without the development of a new model of an inverted pendulum system for stabilization purposes. Therefore, it is necessary first to obtain the dynamic model of a pendulum system while keeping in view the impact of the hydrodynamic forces on its surface. A pendulum-based system model has been used to show the response of water on a submerged body [
2]. In addition, the dynamic response of a viscously damped and non-rotating single degree of freedom (DOF) pendulum system is investigated theoretically and experimentally. Several other works related to the development of dynamic models of different systems in water can be referred to in previous studies [
3,
4,
5,
6].
For at least one century, an inverted pendulum system has been considered as a benchmark system in designing, controlling, stabilizing, and testing of numerous nonlinear mechanical control applications, like boxingbots [
4], segway [
7], and an inverted pendulum cart system [
8]. There are a number of standard control techniques that exist in the control engineering area, which have been tested on an inverted pendulum model prior to their implementation on the real systems [
4,
7,
8,
9,
10,
11]. For example, the design of an active stabilizing system for a single-track vehicle system was studied [
12], and an intelligent control and balancing technique for a robotics system has been formulated [
13]. A fuzzy controller has been suggested to solve the trajectory tracking problem of the inverted pendulum attached to a cart system [
14], while a particle swarm optimization-based neural network controller has been designed for solving a real world unstable control challenge [
15]. The mechanical systems mentioned above have been developed based on the dynamic design of pendulum systems in an open environment like air or vacuum. However, the work on the design and upright stability of a pendulum system in water (i.e., a viscously damped system) by introducing parametric excitations at its base has not yet been reported.
There already exist a number of scientific researches in the literature on the upright stability control of a statically unstable system through parametric excitations. Moreover, there are various control techniques which can be applied for control and stabilization purposes of an inverted pendulum system. Parametric excitation is one of the famous techniques that can be applied for such purposes. It is an open-loop control technique, and this technique does not require any state measurements of the plant. Initially, S. M. Meerkov had done some work on developing a general theory for parametrically excited systems [
16]. He examined the effects of parametric excitations on the response of a controlled system by showing its stability and transient motion analysis. Furthermore, he introduced a control theory for a class of linear finite dimensional systems. Several approaches of parametrically excited systems are based on an averaging method. These approaches gained a greater attention in many other fields, including linear and non-linear control system theories. Since S. M. Meerkov’s publication on vibrational control systems, numerous other researchers have also done research in parametric excitations and stability of linear and non-linear dynamical systems by using an averaging technique, and without averaging technique [
17,
18,
19,
20,
21,
22].
It has already been discussed [
16] that the parametric excitation control principle is based on the introduction of vibrations (like with zero mean value). Many researchers have used different dynamical systems and introduced the vibrational control system theory. In a previous study [
23], the author has shown another method for parametric excitations of an under-actuated mechanical system; this method is the application of the geometric control technique in the differential geometry to determine necessary oscillatory inputs for stabilization and trajectory tracking. Numerical simulations are carried out to investigate stable domains of an inverted pendulum system [
24]. The authors have shown that the loss of stability at larger value of amplitudes observed to follow Hopf bifurcation phenomena. They have further drawn a stability diagram for a pendulum system. A geometrical picture of an inverted pendulum behavior is given in a previous study [
25]. Here, the reason behind the stability of a pendulum system through high frequency vibrations is examined. Averaging technique and vibrational control theory of mechanical systems were studied previously [
26]. A link between averaging method and controllability theory is discussed by linking the concepts of averaged potential and symmetric product. The dynamic behavior of vertical structure of marine riser applications in the presence of hydrodynamic forces and under parametric excitations was studied previously [
3]. The author has shown the dynamic response features of the system for undamped and damped cases, separately. His results illustrated that the effects of internal resonances due to the parametric excitations can be eliminated by considering the effect of hydrodynamic forces in the system dynamic model. Stabilization of upright vertical position of an inverted pendulum system by applying vibrational control is studied in another research [
27]. A formula is also derived for the limit of region of stability of solutions of the Hill’s equation and with damping in the neighborhood of the zeroth natural frequency. A technique for determining the damping ratio of a parametric pendulum is presented in a report [
28]. Pendulum rotations under parametric excitations from viewpoint of energy harvesting purpose are studied in another research [
29]. As the uncontrolled system exhibits complex dynamics, thus the authors considered an added control torque method and obtained the optimal period-1 rotational motion for maximum energy harvesting. It was found that the limiting optimal solution gives about a quarter more energy harvesting than the uniform rotations generates. Moreover, the rotations of a parametrically excited pendulum system fitted on a floating support and were forced to move vertically under the influence of wave currents, and on the basis of a dedicated wave flume, laboratory experiments have been presented in [
5]. Dynamics of the N-pendulum system and its application to wave energy are presented in a report [
30] where numerical simulations were conducted for an experimental rig targeting under development to test the functionality of the concept and modeling the response of the N-pendulum. In one study [
22], the authors investigated whether a parametric excitation control method can also be used for dynamic mechanical systems without the application of the averaging method. Furthermore, authors have shown that this control technique can also be used via stability plots and by using Mathieu equation. In another work [
31], authors have presented a control approach for a parametrically excited pendulum system in view point of energy extraction from an oscillatory motion and sea currents. They have shown that the stable rotations can be obtained regardless of the forcing conditions and for every set of initial conditions. They have further stated that their control method can be used in designing the autonomous pendulum harvester devices.
Many authors have used different systematic and numerical techniques to determine the suitable conditions for stability and stable regions for pendulum systems. The stability border was calculated for an undamped case of an inverted pendulum by using the averaging method reported previously [
32], whereas the stability border was calculated by using a numerical approach (i.e., approximate solution) [
33]. The Floquet theory was used in another study [
34] to determine the lower stability border in the closed form for a parametrically excited inverted pendulum system. The authors also computed the stability borders for both the undamped and viscously damped cases, and have shown that, at larger damping values, the forcing amplitude for a given frequency increases for the damped case as compared with an undamped case. The authors have investigated the dynamic response of a tilted parametric pendulum in a study [
35] where they have plotted the control space diagram of major bifurcation loci for the inverted solutions of a pendulum system. Many authors have used parametric excitations for analyzing the dynamic responses and stability of marine risers [
36,
37,
38]. More recently, a stability analysis of a deep water marine riser under the parametric excitations was studied [
39].
To the best of our knowledge, there have been no studies found on the dynamic behavior and parametrically excited control of an inverted pendulum system in water in view point of wave energy harvesting purposes. This paper presents the dynamic response, upright control, and stability formulism of a pendulum system both in vacuum and in water, when subjected to a parametric excitation input in vertical direction at the support point for the purpose of stabilization. For the first time, a new dynamic model for investigating the underwater response of an inverted pendulum system has been developed, considering hydrodynamics forces. An averaging technique has been applied to obtain an approximate solution of the system. Furthermore, an open loop parametric excitation control technique has been applied to stabilize the pendulum at its upright unstable equilibrium position. We have plotted both the lower and upper stability borders of the pendulum system in vacuum as well as in water, which results in obtaining the corresponding stability regions of the pendulum system. The results are illustrated through numerical simulations. The simulation plots show the following observations: (i) The applied parametric excitation method proposed in this article successfully stabilized the newly developed pendulum system model in water, (ii) there is a significant increase in the excitation amplitude in the stability region for the system in water versus in vacuum, and (iii) the stability region for the system in vacuum is wider than that in water.
The rest of this article is summarized as follows. The physical system, problem formulation statement, and dynamic model of the inverted pendulum system in water are expressed in
Section 2. Parametric excitation control of both systems is discussed in
Section 3. Simulations, maximum energy harvesting, and various kinds of inverted pendulum systems responses in vacuum and in water are presented in
Section 4. Finally, conclusions of this work are drawn in
Section 5.
4. Numerical Simulation Results
This section presents the upright parametric excitation control, stability analysis, and the comparison of both un-damped system and inverted pendulum system (damped) in water, respectively, via simulations. The fourth-order Runge-Kutta (RK) method is used to compute numerical simulations results (MATLAB’s Simulink Toolbox was used for this purpose) of both non-linear inverted pendulum systems, given by Equations (1) and (11), respectively. Simulation values [
1] used for the pendulum system are given in
Table 1.
In the first phase, both inverted pendulum systems are displaced by 1 rad from their upright unstable upward equilibrium positions and without the application of any parametrically excited input.
Figure 3 shows the time response and deviation (red line represents the upright equilibrium point of the pendulum systems) of angular displacements of inverted pendulum systems in vacuum (dash line), and in water (solid blue line) in the presence of hydrodynamics forces.
It can be observed that the angular displacement of both pendulum systems increases, and pendulums move away from their upright unstable positions, and finally become stable at their stable equilibrium position of 180 degrees. As we already know, the parametric excitation control method is only valid for certain bounded ranges of lower amplitudes and higher frequencies of the input oscillatory system as previously explained in [
22,
24,
35,
36]. That is why there exist two bounds for the stability of a pendulum system: A lower and an upper stability bound. Therefore, stability borders for both the systems in vacuum and in water are obtained from Equations (16) and (17) and are illustrated in
Figure 4a,b.
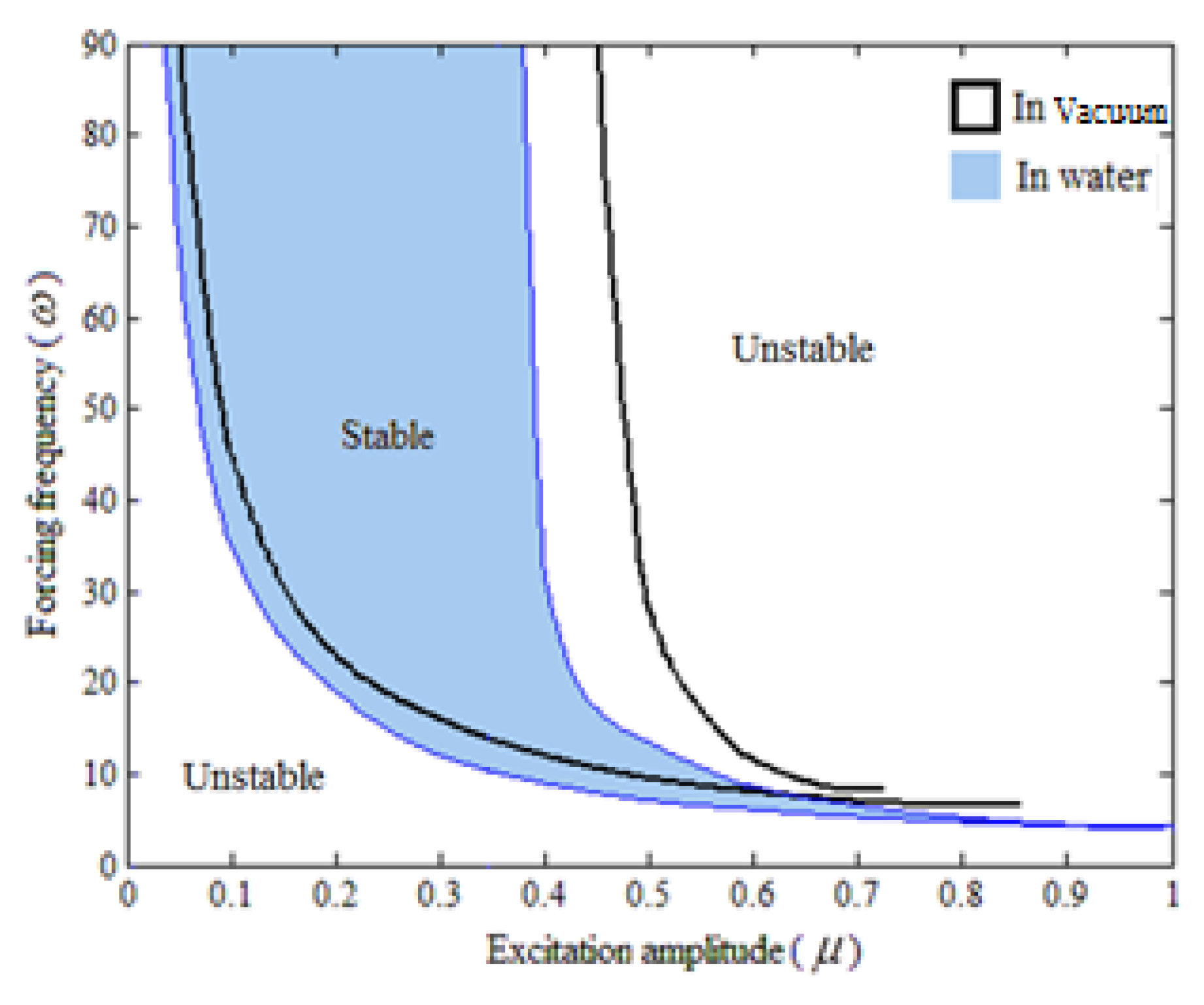
Figure 4a,b shows that if we choose any combination of input of a lower amplitude and higher frequency that falls within a stable region, that should stabilize both systems.
It is also shown that if we choose any combination of input of a lower amplitude and higher frequency that falls within the unstable regions, this will cause instability in both systems.
Figure 5 illustrates the combined stability regions for both systems. It can be observed that the stability region for the system in vacuum is wider than for the system in water, and there is a significant decrease in the stability region for the inverted pendulum system in water.
The reason behind this difference is that the inverted pendulum system in an underwater environment is under the strong influence of hydrodynamics forces and represents a viscously damped system. There is also a significant increase in the excitation amplitude in the stability region for the system in water as compared with the pendulum system in vacuum. The above results are discussed for an undamped and damped pendulum cases in a previous study [
35].
In the second phase, both the pendulum systems are initially taken away from their upright unstable position (zero rad) to 0.01 rad.
Figure 6 shows a numerical simulation of an inverted pendulum system in vacuum for three different points with forcing frequencies of
ω = 10, 14, and 20 rad/s, and excitation amplitudes of
μ = 0.02, 0.04, and 0.06 m.
These points are illustrated in
Figure 4a with black square dots.
Figure 6a shows that the pendulum system is unstable in the lower unstable region, whereas
Figure 6b illustrates that the system is stabilized around its upright unstable position in the stable region, and finally
Figure 6c shows that the system is again unstable in the upper unstable region, and shows a rotating behavior.
Figure 7 shows the numerical simulation of the pendulum system in water for different values of forcing frequencies,
ω = 6.5, 12, and 40 rad/s, but with the same value of the excitation amplitude (like
μ = 0.05 m).
These three points are illustrated in
Figure 4b with blue circular dots.
Figure 7a shows that the system is not stable around our targeted desired position, but it is showing an oscillatory behavior at another location. As mentioned in the literature, a pendulum system under parametric excitations would have more than one stability points (e.g., it may be showing stability around 45 degrees, etc.). However, our targeted stability point is only the upright position and best suited for energy harvesting purposes.
Figure 7b illustrates that the system is stabilized around its upright unstable position in stable region, and finally
Figure 7c shows that the system is unstable in the upper unstable region and finally becomes stable at 180 degrees. It can be observed that, in the underwater environment, the pendulum system is not exhibiting any rotational behavior in the unstable region. This is due to the strong effect of hydrodynamic forces.
Maximum Energy Harvesting
Figure 8a–l demonstrates the time responses of the parametrically controlled stable pendulum systems in vacuum and in water for several values of applied input of smaller amplitudes and higher frequencies. It is clearly evident from
Figure 8a–f that the pendulum system is stable around its upright equilibrium position, but is continuously oscillating in case of vacuum medium. This means that these values of applied input of amplitude and frequency could not harvest maximum energy due to the fact that larger deviations from the equilibrium point could cause further vibrations in the entire system. It can be clearly observed from
Figure 8g–l that the pendulum system is asymptotically stable around its upright equilibrium position in case of water which is a quite favorable condition for the operations of wave energy harvesting devices. This shows that these values of applied input of amplitude and frequency could continuously harvest the maximum amount of energy without safety hazards. Moreover, as mentioned in the literature, input values of applied amplitude and frequency for maximum energy harvesting might vary in case of complex water waves. As a result, up down movements of rectangular base attached at the base of the pendulum system could perform more complex motion profiles.



 and
and 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}