Design Model of Null-Flux Coil Electrodynamic Suspension for the Hyperloop



Abstract

1. Introduction
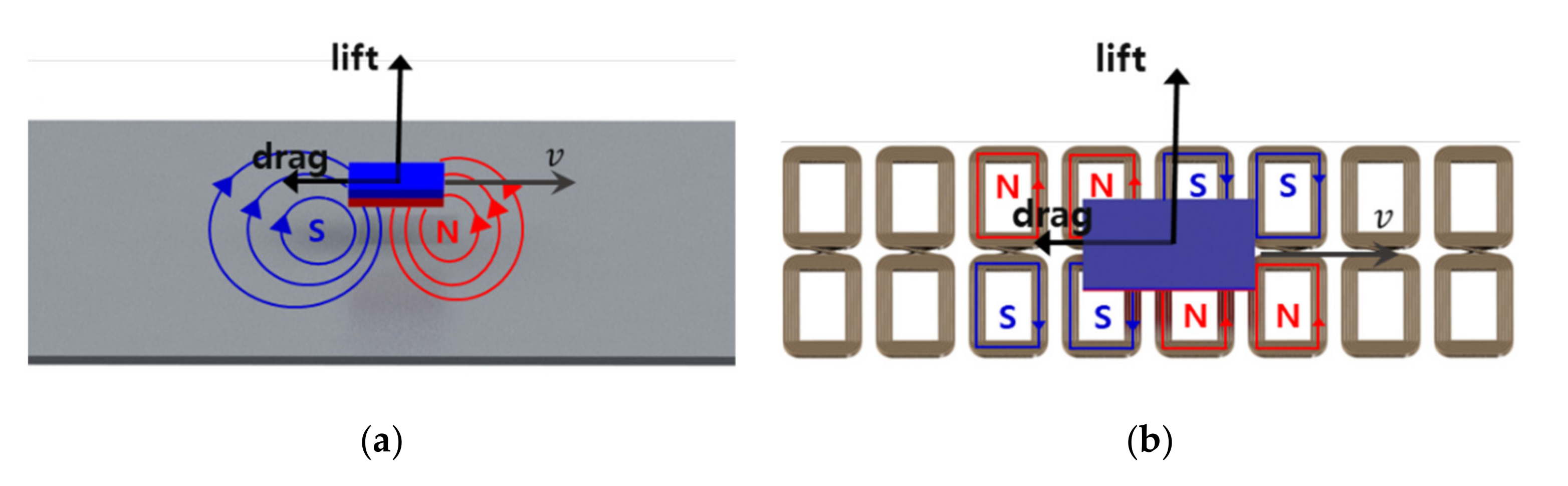
2. Basic Principles of Null-Flux EDS for the Hyperloop
3. Design Model of the Null-Flux EDS Coils
3.1. Assumptions for Simplifying the Design Analysis
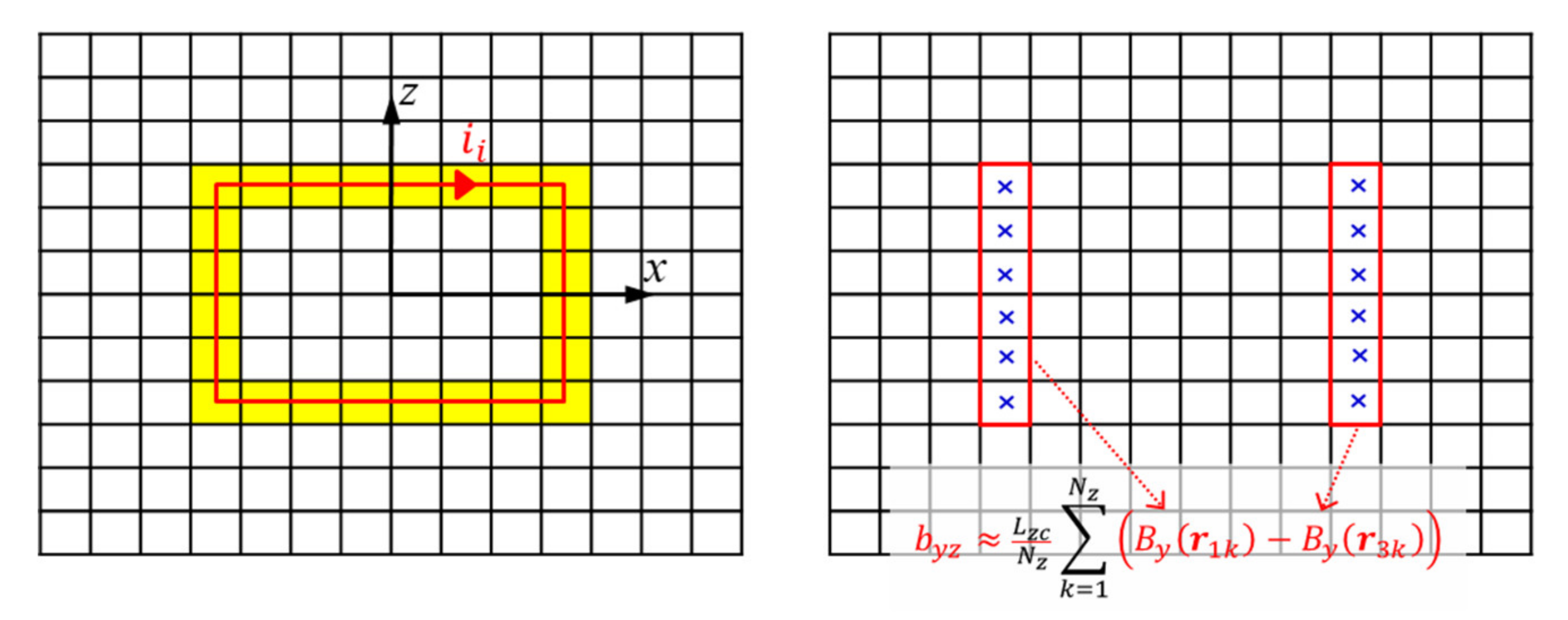
3.2. Induced EMF Model for the Levitation Coil
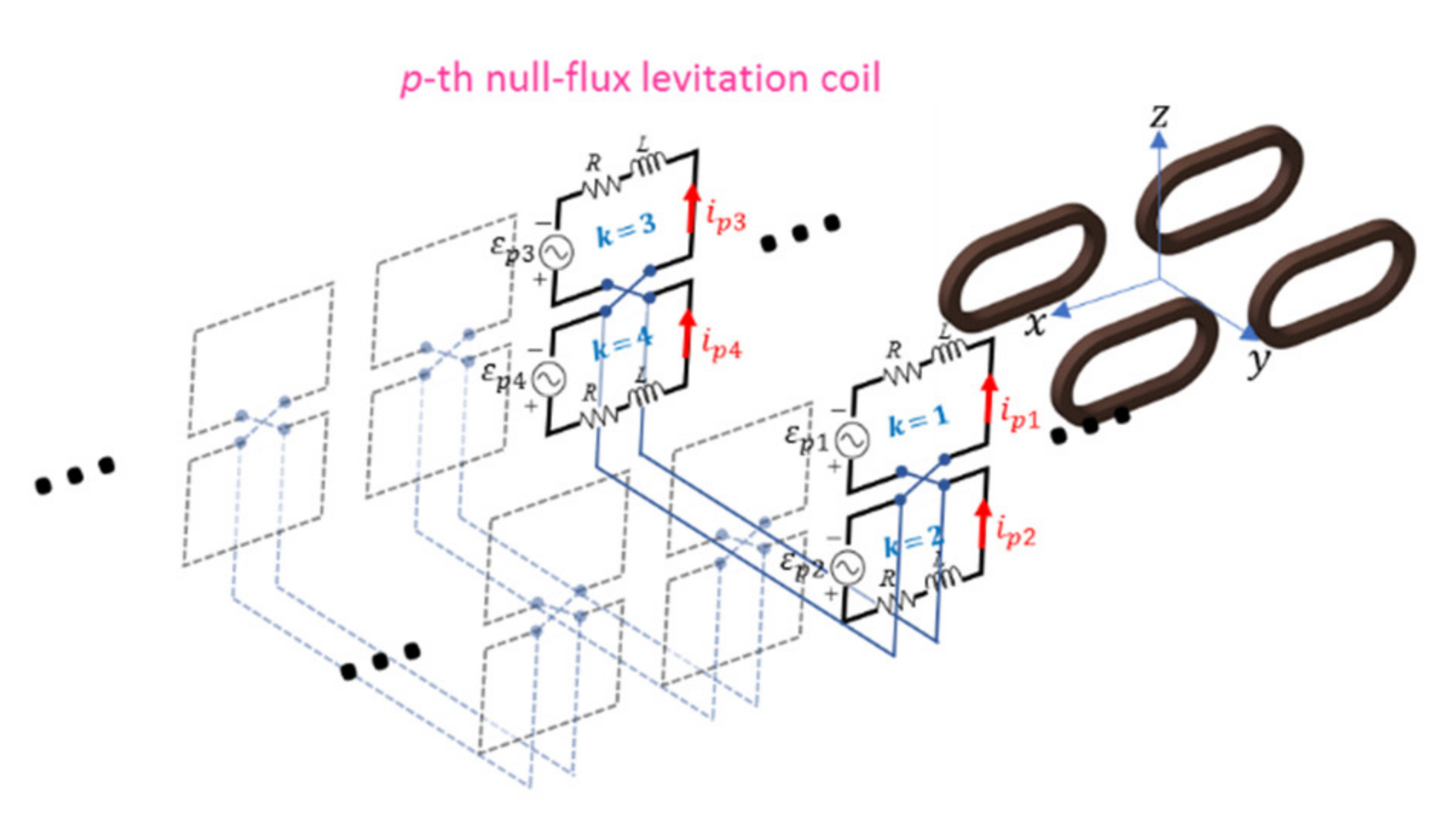
3.3. RL Circuit Analysis for the Induced Current
3.4. Force Formulation of the Null-Flux EDS Device and Track
4. Examples and Validation
4.1. Design Parameters for the Illustrative Application
4.2. Design Model for the Illustrative Application
4.2.1. Resistance and Inductance Approximation
4.2.2. Fourier Series Analysis of the Induced EMF
4.3. Design Results for the Illustrative Application
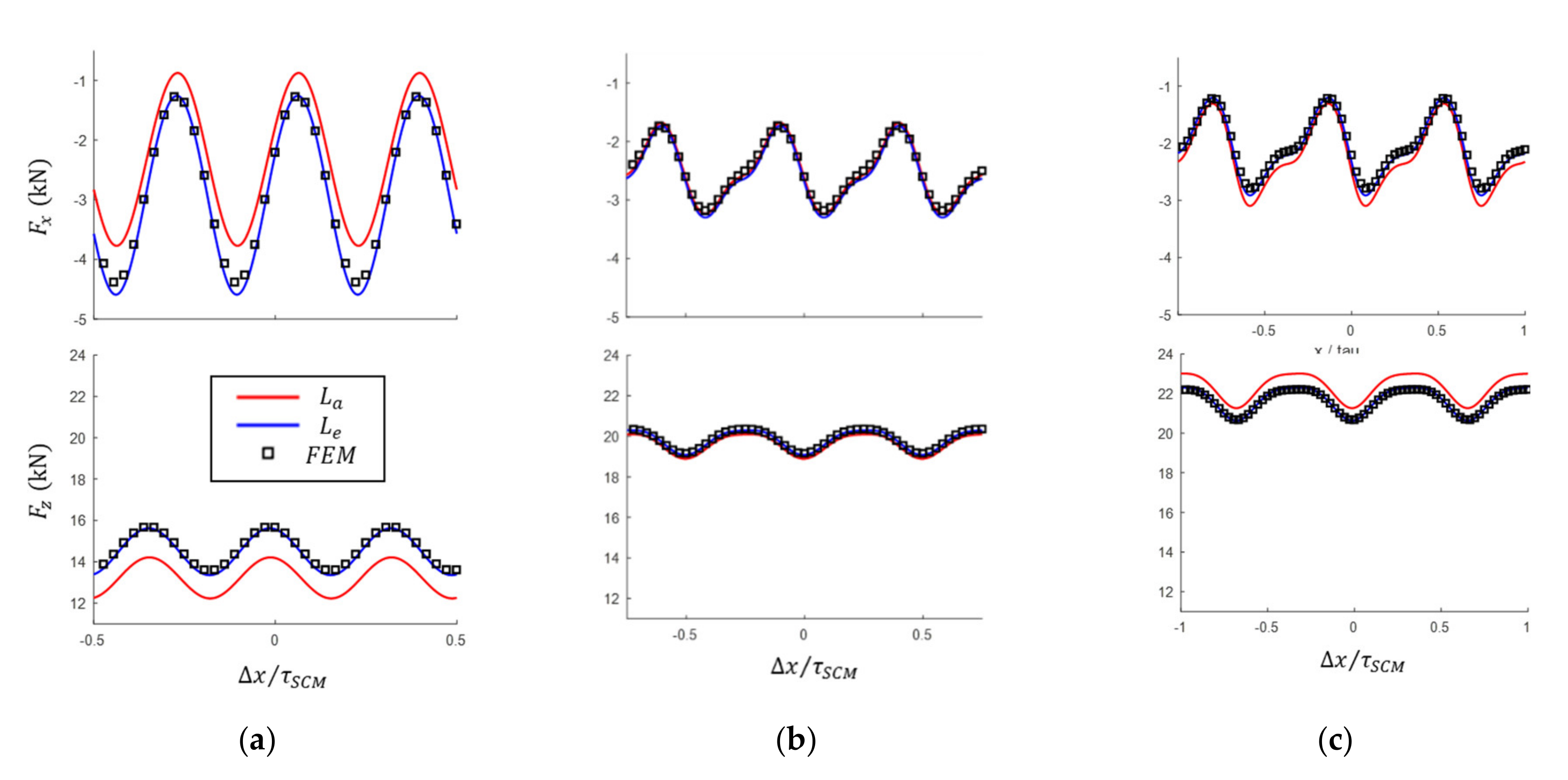
4.4. Design Model Validation with the FEM Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Virgin Hyperloop One Website. Available online: https://virginhyperloop.com (accessed on 13 July 2020).
- Hyperloop Transportation Technologies Website. Available online: https://www.hyperlooptt.com (accessed on 13 July 2020).
- Hyperloop Alpha. Available online: https://www.tesla.com/sites/default/files/blog_images/hyperloop-alpha.pdf (accessed on 13 July 2020).
- Zhang, Y. Numerical simulation and analysis of aerodynamic drag on a subsonic train in evacuated tube transportation. J. Modern Transp. 2012, 20, 44–48. [Google Scholar] [CrossRef]
- Oh, J.-S.; Kang, T.; Ham, S.; Lee, K.-S.; Jang, Y.-J.; Ryou, H.-S.; Ryu, J. Numerical analysis of aerodynamic characteristics of hyperloop system. Energies 2019, 12, 518. [Google Scholar] [CrossRef]
- Sawada, K. Development of magnetically levitated high speed transport system in Japan. IEEE Trans. Magn. 1996, 32, 2230–2235. [Google Scholar] [CrossRef]
- Central Japan Railway Company Website. Available online: https://scmaglev.jr-central-global.com/about/ (accessed on 13 July 2020).
- Hieronymus, H.; Miericke, J.; Pawlitschek, F.; Rudel, M. Experimental study of magnetic forces on normal and null flux coil arrangements in the inductive levitation system. Appl. Phys. 1974, 3, 359–366. [Google Scholar] [CrossRef]
- Miericke, J.; Urankar, L. Theory of electrodynamic levitation with a continuous sheet track—Part I. Appl. Phys. 1973, 2, 201–211. [Google Scholar] [CrossRef]
- Lever, J.H. Technical Assessment of Maglev System Concepts; Final Report. No. AD-A-358293/XAB.; CRREL-SR-98-12; Cold Regions Research and Engineering Lab: Hanover, NH, USA, 1998. Available online: https://rosap.ntl.bts.gov/view/dot/42287/dot_42287_DS1.pdf? (accessed on 3 August 2020).
- Powell, J.R., Jr.; Danby, G.T. Electromagnetic Inductive Suspension and Stabilization System for a Ground Vehicle. U.S. Patent No 3,470,828, 7 October 1969. [Google Scholar]
- Fujiwara, S.; Fujie, J. Levitation-Propulsion Mechanism for Inductive Repulsion Type Magnetically Levitated Railway. U.S. Patent No 4,779,538, 25 October 1988. [Google Scholar]
- Fujie, J.; Nakashima, H.; Fujiwara, S. Levitation, Propulsion and Guidance Mechanism for Inductive Repulsion-Type Magnetically Levitated Railway. U.S. Patent No 4,913,059, 3 April 1990. [Google Scholar]
- Murai, T. Coils for magnetic levitation apparatus. U.S. Patent No 5,657,697, 19 August 1997. [Google Scholar]
- Lim, S.; Kim, D.; Yoo, J.; Park, N.C. A method of induced current estimation of EDS type maglev using 3D transient EM analysis. Trans. Korean Soc. Mech. Eng. A 2019, 43, 253–259. [Google Scholar] [CrossRef]
- Guo, Z.; Li, J.; Zhou, D. Study of a null-flux coil electrodynamic suspension structure for evacuated tube transportation. Symmetry 2019, 11, 1239. [Google Scholar] [CrossRef]
- Davey, K.R. Designing with null flux coils. IEEE Trans. Magn. 1997, 33, 4327–4334. [Google Scholar] [CrossRef]
- He, J.L.; Rote, D.M.; Coffey, H.T. Applications of the dynamic circuit theory to maglev suspension systems. IEEE Trans. Magn. 1993, 29, 4153–4164. [Google Scholar] [CrossRef]
- Murai, T.; Iwamatsu, M.; Yoshioka, H. Optimized design of 8-figure null-flux coils in EDS MAGLEV. IEEJ Trans. Ind. Appl. 2003, 123, 9–14. [Google Scholar] [CrossRef]
- Murai, T.; Fujiwara, S. Design of coil specifications in EDS maglev using optimization program. IEEJ Trans. Ind. Appl. 1997, 117, 905–911. [Google Scholar] [CrossRef]
- Ohashi, S.; Ohsaki, H.; Masada, E. Equivalent model of the side wall electrodynamic suspension system. Electr. Eng. Jap. 1998, 124, 63–73. [Google Scholar] [CrossRef]
- Lee, C.Y.; Lee, J.H.; Lim, J.; Choi, S.; Jo, J.M.; Lee, K.S.; Lee, H. Design and evaluation of prototype high-tc superconducting linear synchronous motor for high-speed transportation. IEEE Trans. Appl. Supercond. 2020, 30, 1–5. [Google Scholar] [CrossRef]
- Mun, J.; Lee, C.; Kim, K.; Sim, K.; Kim, S. Operating thermal characteristics of REBCO magnet for maglev train using detachable cooling system. IEEE Trans. Appl. Supercond. 2019, 29, 1–5. [Google Scholar] [CrossRef]
- Lim, J.; Lee, C.Y.; Choi, S.; Lee, J.H.; Lee, K.S. Design optimization of a 2G HTS magnet for subsonic transportation. IEEE Trans. Appl. Supercond. 2020, 30, 1–5. [Google Scholar] [CrossRef]
- Choi, S.Y.; Lee, C.Y.; Jo, J.M.; Choe, J.H.; Oh, Y.J.; Lee, K.S.; Lim, J.Y. Sub-sonic linear synchronous motors using superconducting magnets for the hyperloop. Energies 2019, 12, 4611. [Google Scholar] [CrossRef]
- Jackson, J.D. Classical Electrodynamics; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Lim, J.; Lee, K.M. Distributed multilevel current models for design analysis of electromagnetic actuators. IEEE/ASME Trans. Mechatron. 2015, 20, 2413–2424. [Google Scholar] [CrossRef]
- Grover, F.W. Inductance Calculations: Working Formulas and Tables; Courier Corporation: North Chelmsford, MA, USA, 1946. [Google Scholar]
- Numerical Methods for Inductance Calculation. Available online: http://electronbunker.ca/eb/CalcMethods1c.html (accessed on 13 July 2020).
- Iwamatsu, M.; Ogata, M.; Seino, H.; Herai, T.; Asahara, T. Development of superconducting magnet for simplified ground coils. Q. Rep. Railw. Tech. Res. Inst. (RTRI) 2006, 47, 12–17. [Google Scholar] [CrossRef]
- Lee, J.H.; Lee, C.Y.; Jo, J.M.; Lim, J.; Choe, J.; Sun, Y.; Lee, K.S. Analysis of the influence of magnetic stiffness on running stability in a high-speed train propelled by a superconducting linear synchronous motor. Proc. Inst. Mech. Eng. F 2019, 233, 170–186. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Number of turns, | turns | |
| Pole pitch, | (1/6, 1/5, 1/4, 1/3, 2/5, 1/2, 3/5, 2/3, 3/4, 4/5, 5/6) | |
| Vertical coil height, | ||
| Wire cross sectional area, | ||
| Horizontal gap between coils, | ||
| Horizontal coil width, | ||
| Vertical core position, | ||
| Aluminum wire conductivity, | ||
| Air gap, | ||
| Thickness of the levitation coil, | ||
| Half of the track length, | ||
| Number of the levitation devices, | - | |
| Subsonic driving velocity, | m/s () | |
| Take off velocity, | m/s ( | |
| Maximum vertical displacement, | ||
| Maximum horizontal displacement, |
| Design | |||||
|---|---|---|---|---|---|
| A | 1 | 16.04 | 8.15 | ||
| B | 1 | 22.17 | 9.47 | ||
| 24.39 | 8.84 |
| Design | ||||||
|---|---|---|---|---|---|---|
| A | 1 | 0.8701 | 1.0395 | |||
| B | 1 | 141.99 | 0.9875 | 1.1156 | ||
| 1.0370 | 1.1724 |
| Design | ||||||||
|---|---|---|---|---|---|---|---|---|
| A | 1 | −0.55 | 18.39 | −2.90 | 14.49 | −0.27 | 9.34 | 19.70 |
| (293.98) | (6.33) | (57.40) | (7.83) | (641.11) | (24.52) | (7.79) | ||
| B | 1 | −0.44 | 22.46 | −2.57 | 19.81 | −0.20 | 9.59 | 23.78 |
| (243.50) | (3.29) | (30.45) | (3.08) | (375.21) | (9.36) | (7.81) | ||
| −0.34 | 23.52 | −2.08 | 21.66 | −0.15 | 8.53 | 23.70 | ||
| (202.32) | (3.12) | (40.96) | (3.86) | (279.39) | (7.47) | (2.66) | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J.; Lee, C.-Y.; Lee, J.-H.; You, W.; Lee, K.-S.; Choi, S. Design Model of Null-Flux Coil Electrodynamic Suspension for the Hyperloop. Energies 2020, 13, 5075. https://doi.org/10.3390/en13195075
Lim J, Lee C-Y, Lee J-H, You W, Lee K-S, Choi S. Design Model of Null-Flux Coil Electrodynamic Suspension for the Hyperloop. Energies. 2020; 13(19):5075. https://doi.org/10.3390/en13195075
Chicago/Turabian StyleLim, Jungyoul, Chang-Young Lee, Jin-Ho Lee, Wonhee You, Kwan-Sup Lee, and Suyong Choi. 2020. "Design Model of Null-Flux Coil Electrodynamic Suspension for the Hyperloop" Energies 13, no. 19: 5075. https://doi.org/10.3390/en13195075
APA StyleLim, J., Lee, C.-Y., Lee, J.-H., You, W., Lee, K.-S., & Choi, S. (2020). Design Model of Null-Flux Coil Electrodynamic Suspension for the Hyperloop. Energies, 13(19), 5075. https://doi.org/10.3390/en13195075