Impact of Powertrain Components Size and Degradation Level on the Energy Management of a Hybrid Industrial Self-Guided Vehicle



Abstract
1. Introduction
2. Materials and Methods
2.1. Project Background
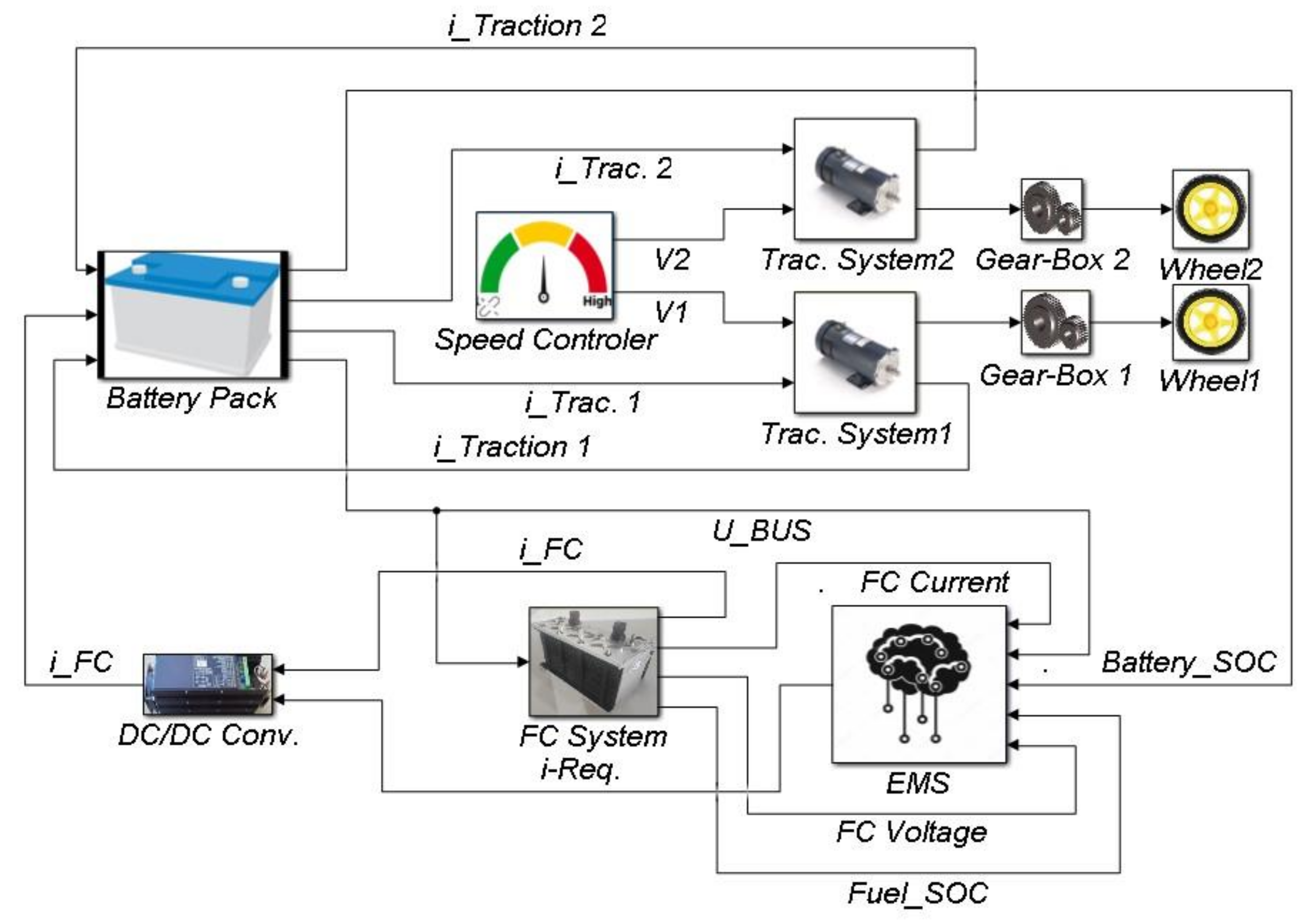
2.2. The DDMR Powertrain Modeling
2.3. Traction Subsystem
2.4. Energy Storage Subsystem (Battery)
2.5. Fuel Cell as Range Extender
2.6. Energy Management Strategy (EMS)
3. Experimental Tests
4. Result and Discussions
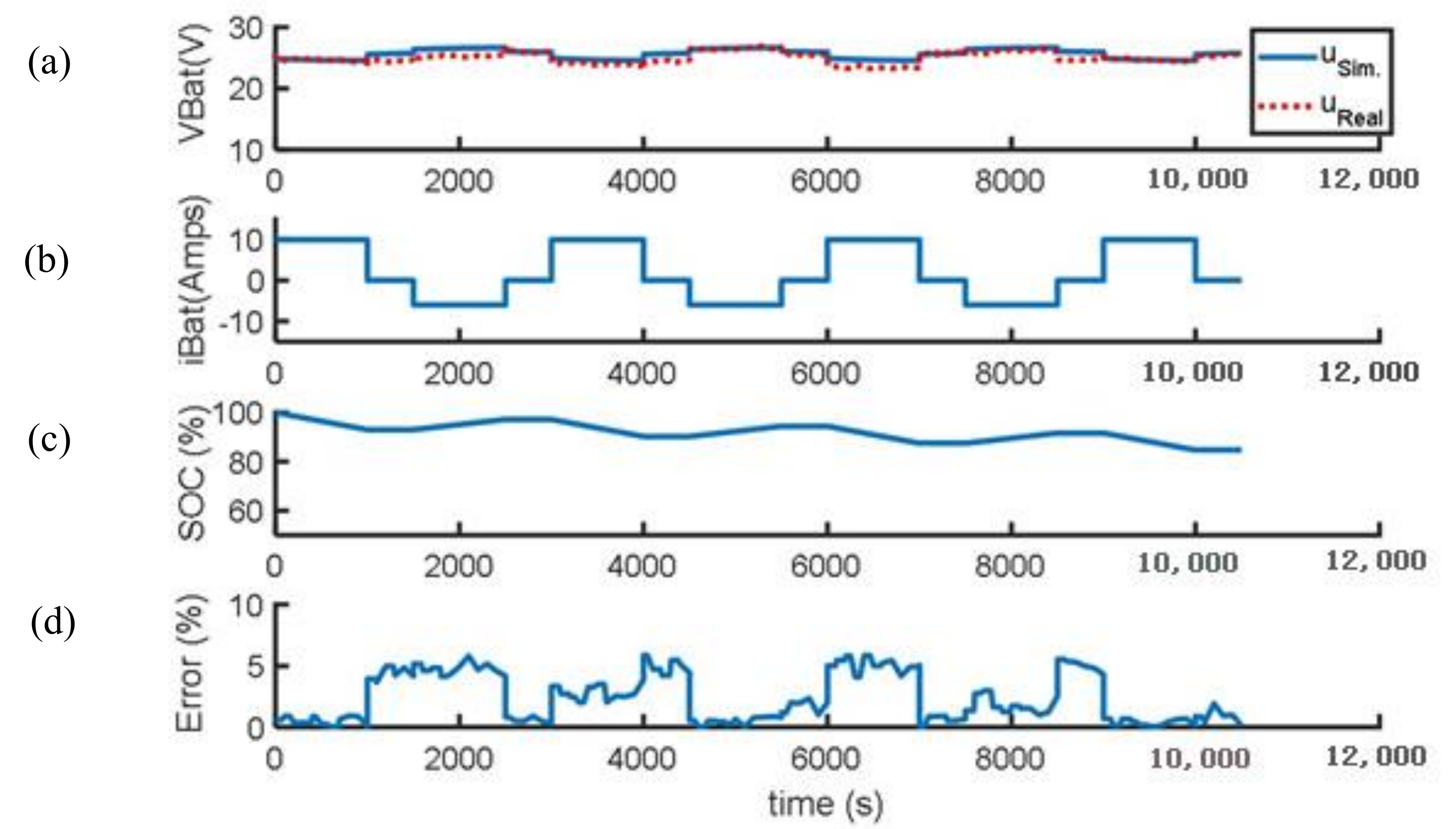
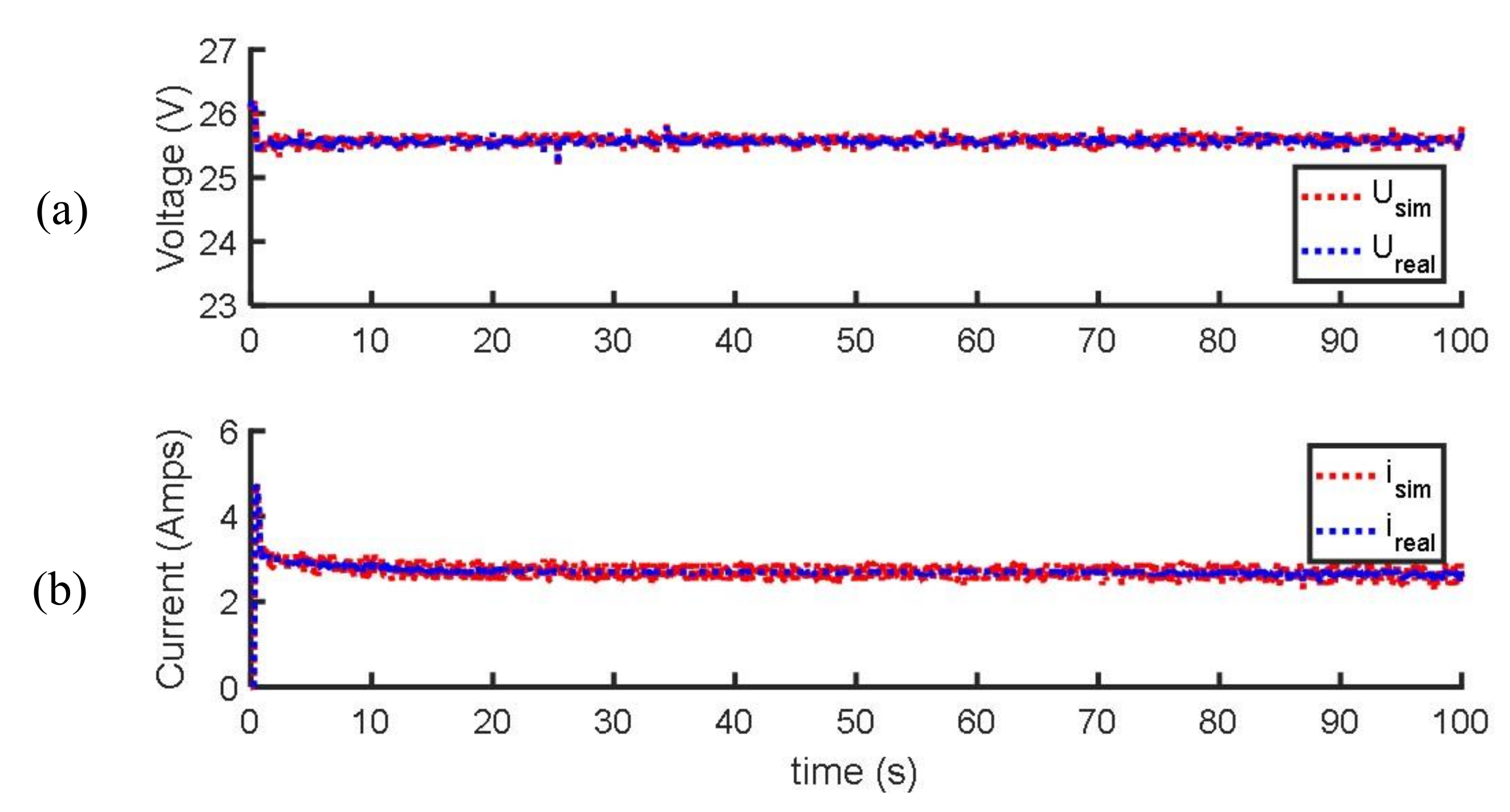
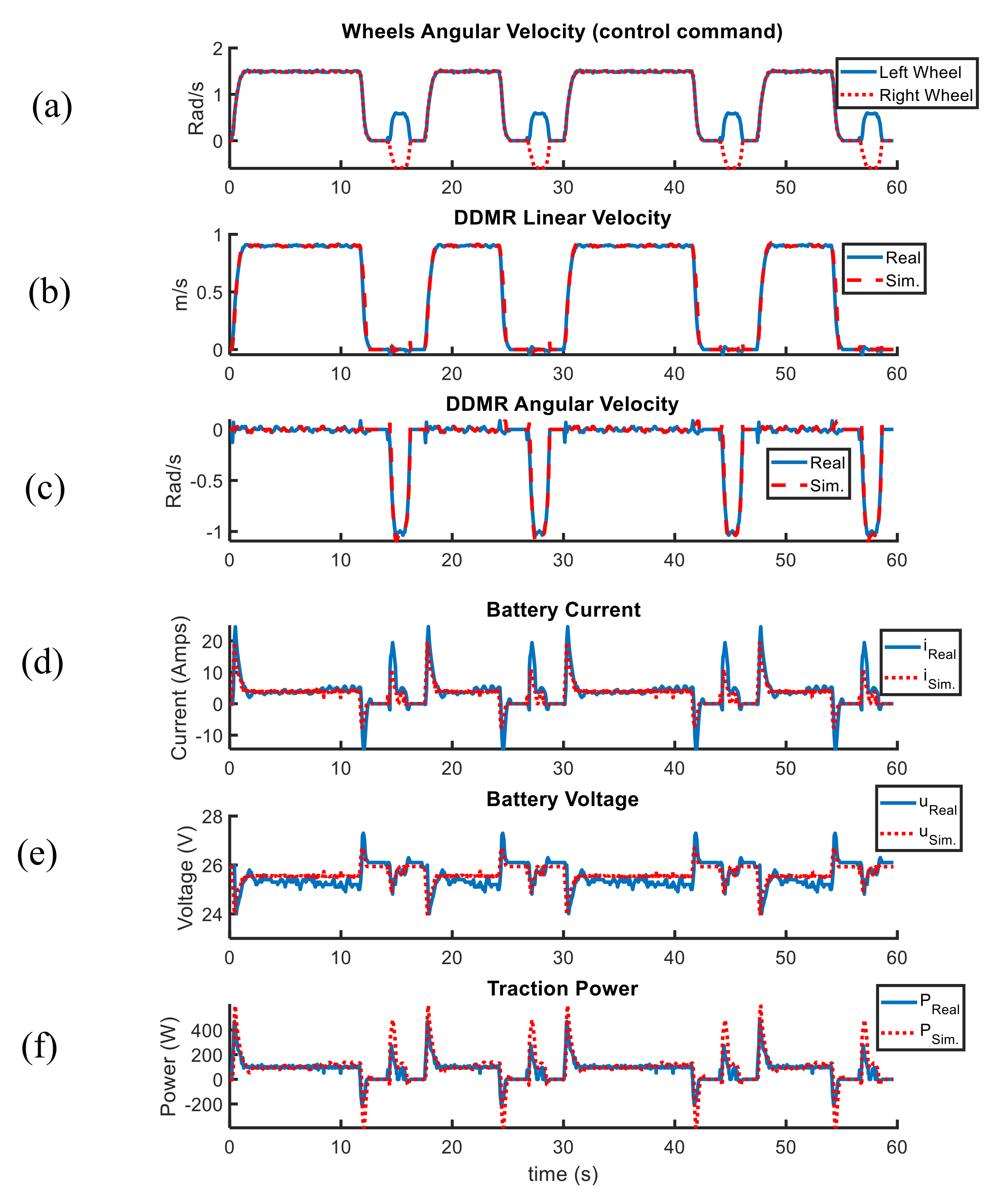
4.1. Model Validation
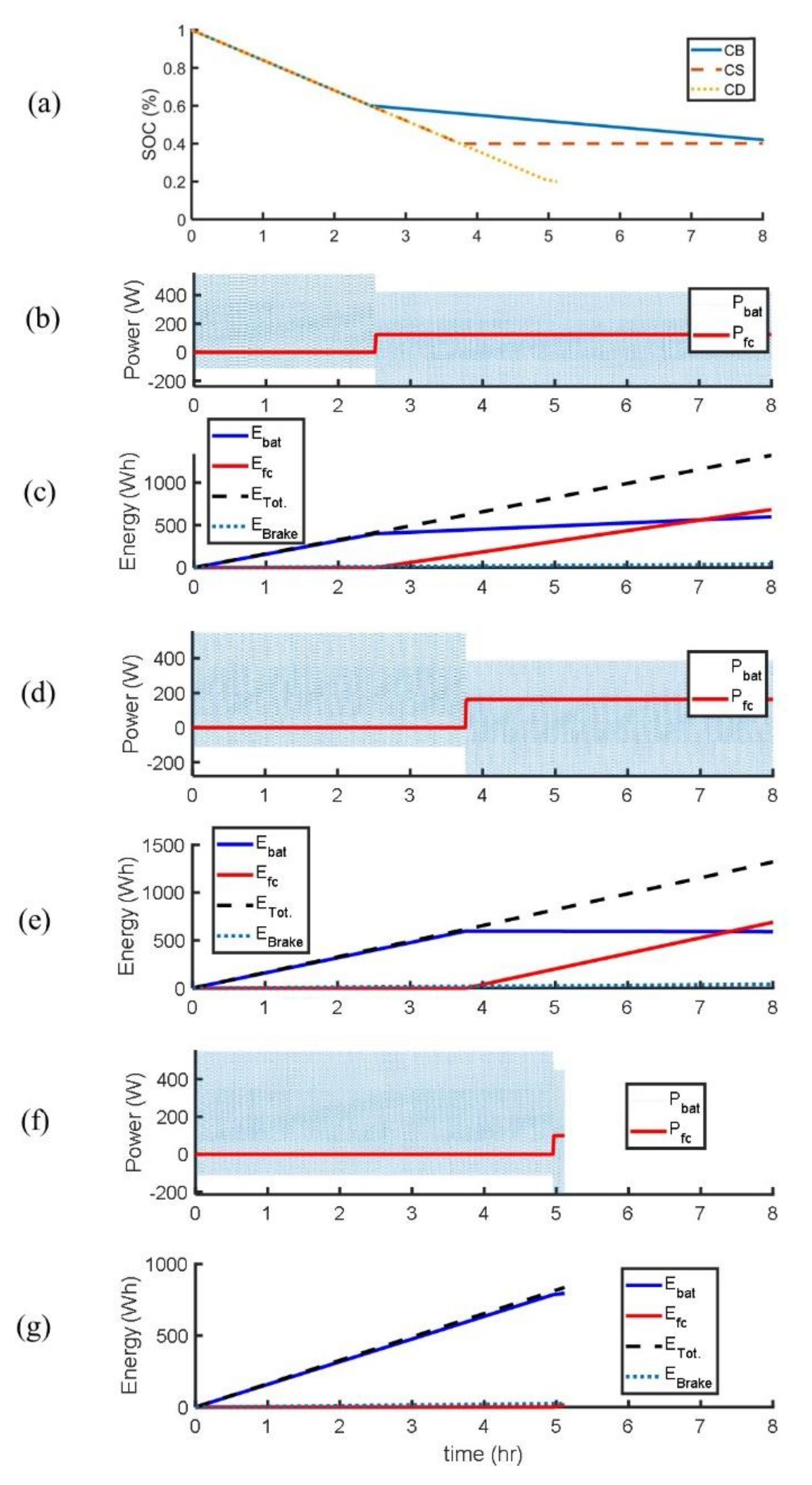
4.2. Mixed Working Cycle Analysis
4.3. Impact of FC Sizing and Battery Degradation on EMS Performance
5. Conclusions
- Exploring the effect of FC degradation on EMS performance and FC sizing.
- Proposing an online EMS, based on the online identification of the maximum efficiency of the fuel cell system that changes over time and an online battery management system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hermann, M.; Pentek, T.; Otto, B. Design principles for industrie 4.0 scenarios. In Proceedings of the 2016 IEEE 49th Hawaii International Conference on System Sciences (HICSS), Koloa, HI, USA, 5–8 January 2016; pp. 3928–3937. [Google Scholar]
- Watzenig, D.; Horn, M. Automated Driving: Safer and More Efficient Future Driving; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Martins, F.N.; Sarcinelli-Filho, M.; Carelli, R. A velocity-based dynamic model and its properties for differential drive mobile robots. J. Intell. Robot. Syst. 2017, 85, 277–292. [Google Scholar] [CrossRef]
- Ehsani, M.; Gao, Y.; Longo, S.; Ebrahimi, K. Modern Electric, Hybrid Electric, and Fuel Cell Vehicles; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Li, X.; Wang, Z.; Zhang, L.; Zou, C.; Dorrell, D. State-of-health estimation for Li-ion batteries by combing the incremental capacity analysis method with grey relational analysis. J. Power Sources 2019, 410, 106–114. [Google Scholar] [CrossRef]
- Thangavelautham, J.; Strawser, D.; Cheung, M.Y.; Dubowsky, S. Lithium hydride powered PEM fuel cells for long-duration small mobile robotic missions. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 415–422. [Google Scholar]
- Eriksson, E.; Gray, E.M. Optimization and integration of hybrid renewable energy hydrogen fuel cell energy systems–A critical review. Appl. Energy 2017, 202, 348–364. [Google Scholar] [CrossRef]
- Thangavelautham, J.; Gallardo, D.; Strawser, D.; Dubowsky, S. Hybrid fuel cell power for long duration robot missions in field environments. In Field Robotics; World Scientifi: Singapore, 2012; pp. 471–478. [Google Scholar]
- Joh, H.-I.; Ha, T.J.; Hwang, S.Y.; Kim, J.-H.; Chae, S.-H.; Cho, J.H.; Prabhuram, J.; Kim, S.-K.; Lim, T.-H.; Cho, B.-K.; et al. A direct methanol fuel cell system to power a humanoid robot. J. Power Sources 2010, 195, 293–298. [Google Scholar] [CrossRef]
- Kesner, S.B.; Plante, J.-S.; Boston, P.J.; Fabian, T.; Dubowsky, S. Mobility and power feasibility of a microbot team system for extraterrestrial cave exploration. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 4893–4898. [Google Scholar]
- Lee, S.-Y.; Min, I.-G.; Kim, H.-J.; Nam, S.W.; Lee, J.; Kim, S.J.; Jang, J.H.; Cho, E.; Song, K.H.; Hong, S.-A.; et al. Development of a 600 w proton exchange membrane fuel cell power system for the hazardous mission robot. J. Fuel Cell Sci. Technol. 2010, 7, 3. [Google Scholar] [CrossRef]
- He, X.; Jiang, Y. Review of hybrid electric systems for construction machinery. Autom. Constr. 2018, 92, 286–296. [Google Scholar] [CrossRef]
- Hosseinzadeh, E.; Rokni, M.; Advani, S.G.; Prasad, A.K. Performance simulation and analysis of a fuel cell/battery hybrid forklift truck. Int. J. Hydrog. Energy 2013, 38, 4241–4249. [Google Scholar] [CrossRef]
- Amamou, A.A.; Kelouwani, S.; Boulon, L.; Agbossou, K. A comprehensive review of solutions and strategies for cold start of automotive proton exchange membrane fuel cells. IEEE Access 2016, 4, 4989–5002. [Google Scholar] [CrossRef]
- Vivas, F.; de las Heras, A.; Segura, F.; Andújar, J. A review of energy management strategies for renewable hybrid energy systems with hydrogen backup. Renew. Sustain. Energy Rev. 2018, 82, 126–155. [Google Scholar] [CrossRef]
- Lü, X.; Qu, Y.; Wang, Y.; Qin, C.; Liu, G. A comprehensive review on hybrid power system for PEMFC-HEV: Issues and strategies. Energy Convers. Manag. 2018, 171, 1273–1291. [Google Scholar] [CrossRef]
- Hannan, M.; Azidin, F.; Mohamed, A. Hybrid electric vehicles and their challenges: A review. Renew. Sustain. Energy Rev. 2014, 29, 135–150. [Google Scholar] [CrossRef]
- Garcia, P.; Fernandez, L.M.; Garcia, C.A.; Jurado, F. Energy management system of fuel-cell-battery hybrid tramway. IEEE Trans. Ind. Electron. 2009, 57, 4013–4023. [Google Scholar] [CrossRef]
- Jiang, W.; Fahimi, B. Active Current Sharing and Source Management in Fuel Cell–Battery Hybrid Power System. IEEE Trans. Ind. Electron. 2010, 57, 752–761. [Google Scholar] [CrossRef]
- Segura, F.; Andújar, J.M.; Durán, E. Analog current control techniques for power control in PEM fuel-cell hybrid systems: A critical review and a practical application. IEEE Trans. Ind. Electron. 2010, 58, 1171–1184. [Google Scholar] [CrossRef]
- Torres, J.; Gonzalez, R.; Gimenez, A.; Lopez, J. Energy management strategy for plug-in hybrid electric vehicles. A comparative study. Appl. Energy 2014, 113, 816–824. [Google Scholar] [CrossRef]
- Kim, C.H.; Kim, B.K. Minimum-energy translational trajectory generation for differential-driven wheeled mobile robots. J. Intell. Robot. Syst. 2007, 49, 367–383. [Google Scholar] [CrossRef]
- Mei, Y.; Lu, Y.-H.; Hu, Y.C.; Lee, C.G. Energy-efficient motion planning for mobile robots. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 5, pp. 4344–4349. [Google Scholar]
- Liu, S.; Sun, D. Minimizing energy consumption of wheeled mobile robots via optimal motion planning. IEEE/ASME Trans. Mechatron. 2013, 19, 401–411. [Google Scholar] [CrossRef]
- Krcmar, L.; Mach, O.; Cernohorsky, J. Design and Efficiency Mapping of an Electric Drive for Mobile Robotic Container Platform for Use in Industrial Halls. In Proceedings of the 2018 IEEE International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Amalfi, Italy, 20–22 June 2018; pp. 963–967. [Google Scholar]
- Andersen, L.G.; Larsen, J.K.; Fraser, E.S.; Schmidt, B.; Dyre, J.C. Rolling resistance measurement and model development. J. Transp. Eng. 2014, 141, 04014075. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854. [Google Scholar] [CrossRef]
- Xiong, R.; Cao, J.; Yu, Q.; He, H.; Sun, F. Critical review on the battery state of charge estimation methods for electric vehicles. IEEE Access 2017, 6, 1832–1843. [Google Scholar] [CrossRef]
- Sone, Y.; Ooto, H.; Eguro, T.; Yoshida, T.; Kubota, M.; Yoshida, H.; Yamamoto, M.; Sakai, S.; Ogawa, K.; Takeda, Y.; et al. Charge and discharge performance of over-discharged lithium-ion secondary battery—Lessons learned from the operation of the interplanetary spacecraft HAYABUSA. Electrochemistry 2007, 75, 950–957. [Google Scholar]
- Ng, K.S.; Moo, C.-S.; Chen, Y.-P.; Hsieh, Y.-C. Enhanced coulomb counting method for estimating state-of-charge and state-of-health of lithium-ion batteries. Appl. Energy 2009, 86, 1506–1511. [Google Scholar]
- Thirugnanam, K.; TP, E.R.J.; Singh, M.; Kumar, P. Mathematical modeling of Li-ion battery using genetic algorithm approach for V2G applications. IEEE Trans. Energy Convers. 2014, 29, 332–343. [Google Scholar]
- Dhameja, S. Electric Vehicle Battery Systems; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Power, B. Bioenno Power Lithium Iron Phosphate (LiFePO4) Battery Model BLF-2440A. Bioenno Power Co. Available online: https://www.bioennopower.com/products/24v-40ah-lfp-battery-pvc-blf-2440a (accessed on 27 July 2020).
- Squadrito, G.; Maggio, G.; Passalacqua, E.; Lufrano, F.; Patti, A. An empirical equation for polymer electrolyte fuel cell (PEFC) behaviour. J. Appl. Electrochem. 1999, 29, 1449–1455. [Google Scholar] [CrossRef]
- Amamou, A.; Kandidayeni, M.; Boulon, L.; Kelouwani, S. Real time adaptive efficient cold start strategy for proton exchange membrane fuel cells. Appl. Energy 2018, 216, 21–30. [Google Scholar] [CrossRef]
- Ettihir, K.; Boulon, L.; Agbossou, K. Optimization-based energy management strategy for a fuel cell/battery hybrid power system. Appl. Energy 2016, 163, 142–153. [Google Scholar] [CrossRef]
- Delarue, P.; Bouscayrol, A.; Semail, E. Generic control method of multileg voltage-source-converters for fast practical implementation. IEEE Trans. Power Electron. 2003, 18, 517–526. [Google Scholar]
- Young, K.; Wang, C.; Wang, L.Y.; Strunz, K. Electric vehicle battery technologies. In Electric Vehicle Integration into Modern Power Networks; Springer: Berlin/Heidelberg, Germany, 2013; pp. 15–56. [Google Scholar]
- Amamou, A.; Kandidayeni, M.; Boulon, L.; Kelouwani, S.; Macia, A. Efficient Model Selection for Real-Time Adaptive Strategy of a Fuel Cell System on Vehicular Applications. Int. J. Hydrog. Energy 2020, 45, 19664–19675. [Google Scholar]
- Kandidayeni, M.; Macias, A.; Amamou, A.A.; Boulon, L.; Kelouwani, S.; Chaoui, H. Overview and benchmark analysis of fuel cell parameters estimation for energy management purposes. J. Power Sources 2018, 380, 92–104. [Google Scholar] [CrossRef]
- Keränen, T.; Karimäki, H.; Viitakangas, J.; Vallet, J.; Ihonen, J.; Hyötylä, P.; Uusalo, H.; Tingelöf, T. Development of integrated fuel cell hybrid power source for electric forklift. J. Power Sources 2011, 196, 9058–9068. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Rolling resistance coefficient | Croll | 0.02 |
| Drive wheel radius | R | 0.197 m |
| Wheelbase | L | 0.72 m |
| Total mass | m | 100 kg |
| Moment of inertia for motor’s rotor | I | 0.3 kg m2 |
| Linear acceleration | a | 1 m s−2 |
| Rotational acceleration | ω | 1 Rad. s−2 |
| Parameter | Value |
|---|---|
| Battery nominal voltage and capacity | 25.6 V, 40 Ah |
| Charging Voltage | 29.2 VDC |
| Charging Current | 4–8 A |
| Open Circuit Voltage Range | 29.2 VDC |
| Maximum Continuous Discharge Current | 40 A |
| Maximum Peak Discharge | 80 A (3 Sec.) |
| Operating Temperature | −10 °C to 60 °C |
| Measured Parameters | Motion Type | ||||
|---|---|---|---|---|---|
| Transition in the X-Direction | Rotational | ||||
| Trapezoid | Backward | Forward | Rotation Around the Center | Circular Pathway | |
 |  |  |  |  | |
| Wheels speed profile (Solid line: right wheel speed Dashed line: left wheel speed) |  |  |  |  |  |
| Average speed of the right wheel (Rad s−1) | 1.4 | 1.5 | 1.5 | 0.57 | 1.3 |
| Average speed of left wheel (Rad s−1) | 1.4 | 1.5 | 1.5 | −0.57 | 2 |
| Average linear speed (m s−1) | 0.85 | 0.9 | 0.9 | 0 | 0.32 |
| Average linear acceleration (m s−2) | 0.7 | −0.9 | 0.9 | 0 | 0.9 |
| Average rotational velocity of the vehicle (Rad s−1) | 0 | 0 | 0 | 0.31 | 0.19 |
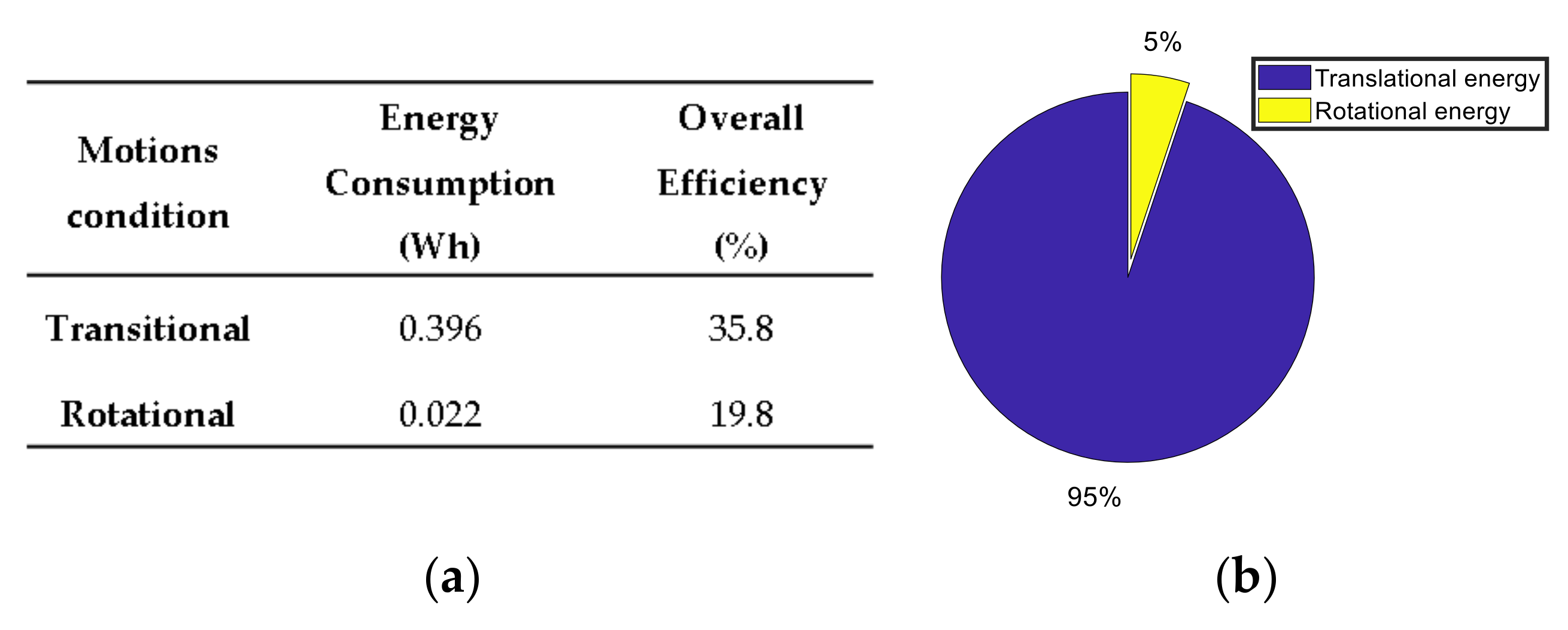
| Motions Condition | Movement Type | Ave. Demanded Power (W) | Max. Demanded Power (W) | Energy Consumption (Wh) | Overall Efficiency (%) |
|---|---|---|---|---|---|
| Transitional in X-direction | Forward | 292.7 * | 508.8 * | 0.322 * | 34.3 * |
| 283.5 ** | 497.3 ** | 0.312 ** | 33.5 ** | ||
| Backward | 293.6 * | 509.5 * | 0.323 * | 33.9 * | |
| 283.6 ** | 498.5 ** | 0.312 ** | 32.4 ** | ||
| Trapezoid speed profile | 256.3 * | 235.1 * | 0.282 * | 37.4 * | |
| 246.1 ** | 242.2 ** | 0.271 ** | 35.9 ** | ||
| Rotational | Rotation around the center | 531.8 * | 264.4 * | 0.585 * | 19.3 * |
| 509.7 ** | 274.8 ** | 0.561 ** | 20.2 ** | ||
| Circular pathway | 1053.6 * | 457.7 * | 1.159 * | 38.07 * | |
| 1088.1 ** | 450.3 ** | 1.069 ** | 36.9 ** |
| EMS Mode | FC Nominal Power (Max Power) (W) | Battery Charge and Discharge Cycle | Working Time (s) (h) | H2 Cons. (gr.) | Provided Energy by FC (Wh) | Provided Energy by Battery (Wh) | Batt. SOH (%) | Batt. Final SOC (%) |
|---|---|---|---|---|---|---|---|---|
| Charge Depleting (CD) | 100 | 0 a | 18,411 (5.114) | +0.57 | 16 | 796 | 100 | 20 |
| 750 | 16,040 (4.455) | +0.57 | 16 | 691 | 90 | 20 | ||
| 1500 | 12,767 (3.546) | +0.56 | 15 | 347 | 75 | 20 | ||
| 160 | 0 | 18,615 (5.120) | +0.72 | 26 | 798 | 100 | 20 | |
| 750 | 16,125 (4.459) | +0.71 | 25 | 693 | 90 | 20 | ||
| 1500 | 12,753 (3.548) | +0.68 | 24 | 352 | 75 | 20 | ||
| 200 | 0 | 18,658 (5.128) | +1.03 | 33 | 802 | 100 | 20 | |
| 750 | 16,153 (4.467) | +0.98 | 32 | 697 | 90 | 20 | ||
| 1500 | 12,823 (3.555) | +0.86 | 30 | 355 | 75 | 20 | ||
| 300 | 0 | 18,658 (5.132) | +1.53 | 50 | 810 | 100 | 20 | |
| 750 | 16,153 (4.477) | +1.46 | 48 | 703 | 90 | 20 | ||
| 1500 | 12,823 (3.562) | +1.29 | 45 | 359 | 75 | 20 | ||
| Charge sustaining (CS) | 100 | 0 | 25,460 (7.072) | +12 | 330 | 798 | 100 | 20 |
| 750 | 23,088 (6.413) | +12 | 330 | 693 | 90 | 20 | ||
| 1500 | 19.813 (5.505) | +12 | 330 | 349 | 75 | 20 | ||
| 160 | 0 | 28,800 (8) | +24 | 689 | 591 | 100 | 39.5 | |
| 750 | 28,800 (8) | +28 | 780 | 502 | 90 | 38.5 | ||
| 1500 | 28,800 (8) | +33 | 925 | 359 | 75 | 38.3 | ||
| 200 | 0 | 28,800 (8) | +30 | 844 | 440 | 100 | 54.7 | |
| 750 | 28,800 (8) | +35 | 975 | 310 | 90 | 56.9 | ||
| 1500 | 28,800 (8) | +44 | 1156 | 132 | 75 | 60.1 | ||
| 300 | 0 | 28,800 (8) | +42 | 1186 | 105 | 100 | 85.5 | |
| 750 | 28,800 (8) | +42 | 1184 | 106 | 90 | 75.2 | ||
| 1500 | 28,800 (8) | +42 | 1185 | 104 | 75 | 60.7 | ||
| Charge Blending (CB) | 100 | 0 | 26,629 (7.396) | +10 | 381 | 800 | 100 | 20 |
| 750 | 24,258 (6.738) | +10 | 380 | 695 | 90 | 20 | ||
| 1500 | 20,986 (5.829) | +10 | 382 | 551 | 75 | 20 | ||
| 160 | 0 | 28,800 (8) | +19 | 683 | 598 | 100 | 40 | |
| 750 | 28,800 (8) | +22 | 845 | 422 | 90 | 37.6 | ||
| 1500 | 28,800 (8) | +26 | 878 | 406 | 75 | 34.3 | ||
| 200 | 0 | 28,800 (8) | +23 | 853 | 430 | 100 | 56.3 | |
| 750 | 28,800 (8) | +26 | 955 | 329 | 90 | 59.9 | ||
| 1500 | 28,800 (8) | +32 | 942 | 342 | 75 | 40 | ||
| 300 | 0 | 28,800 (8) | +28 | 1032 | 245 | 100 | 72.1 | |
| 750 | 28,800 (8) | +31.5 | 1192 | 96 | 90 | 77.1 | ||
| 1500 | 28,800 (8) | +36.7 | 1414 | −121 | 75 | 84 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghobadpour, A.; Amamou, A.; Kelouwani, S.; Zioui, N.; Zeghmi, L. Impact of Powertrain Components Size and Degradation Level on the Energy Management of a Hybrid Industrial Self-Guided Vehicle. Energies 2020, 13, 5041. https://doi.org/10.3390/en13195041
Ghobadpour A, Amamou A, Kelouwani S, Zioui N, Zeghmi L. Impact of Powertrain Components Size and Degradation Level on the Energy Management of a Hybrid Industrial Self-Guided Vehicle. Energies. 2020; 13(19):5041. https://doi.org/10.3390/en13195041
Chicago/Turabian StyleGhobadpour, Amin, Ali Amamou, Sousso Kelouwani, Nadjet Zioui, and Lotfi Zeghmi. 2020. "Impact of Powertrain Components Size and Degradation Level on the Energy Management of a Hybrid Industrial Self-Guided Vehicle" Energies 13, no. 19: 5041. https://doi.org/10.3390/en13195041
APA StyleGhobadpour, A., Amamou, A., Kelouwani, S., Zioui, N., & Zeghmi, L. (2020). Impact of Powertrain Components Size and Degradation Level on the Energy Management of a Hybrid Industrial Self-Guided Vehicle. Energies, 13(19), 5041. https://doi.org/10.3390/en13195041