An Online Energy-Saving Driving Strategy for Metro Train Operation Based on the Model Predictive Control of Switched-Mode Dynamical Systems


Abstract
1. Introduction
1.1. Background and Motivation
1.2. Literature Review
1.3. The Focus of This Study
- By employing MPC, an online algorithm is presented to obtain the optimal switching times at each sampling instant, which partially extends the offline optimization in [25] to online optimization, and can timely respond to disturbances during train operation.
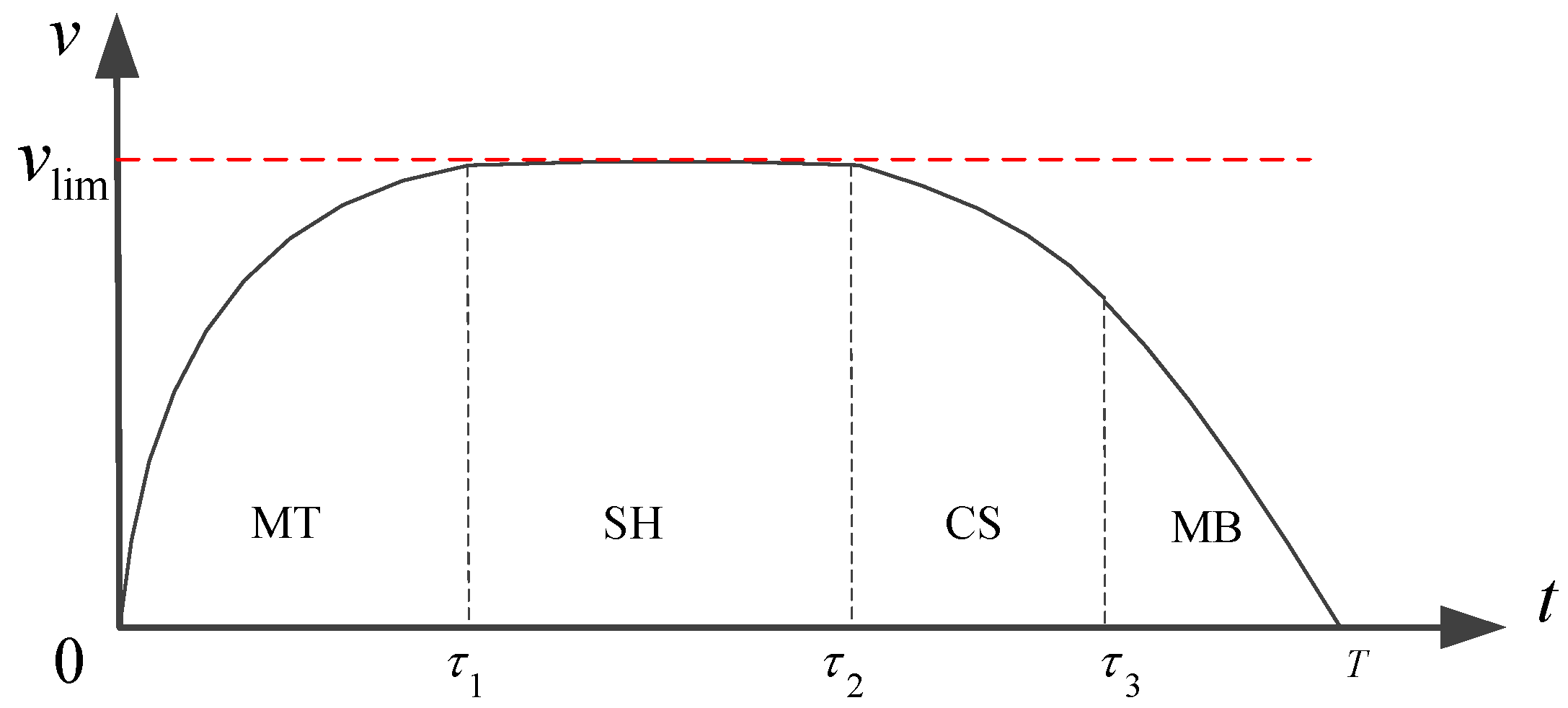
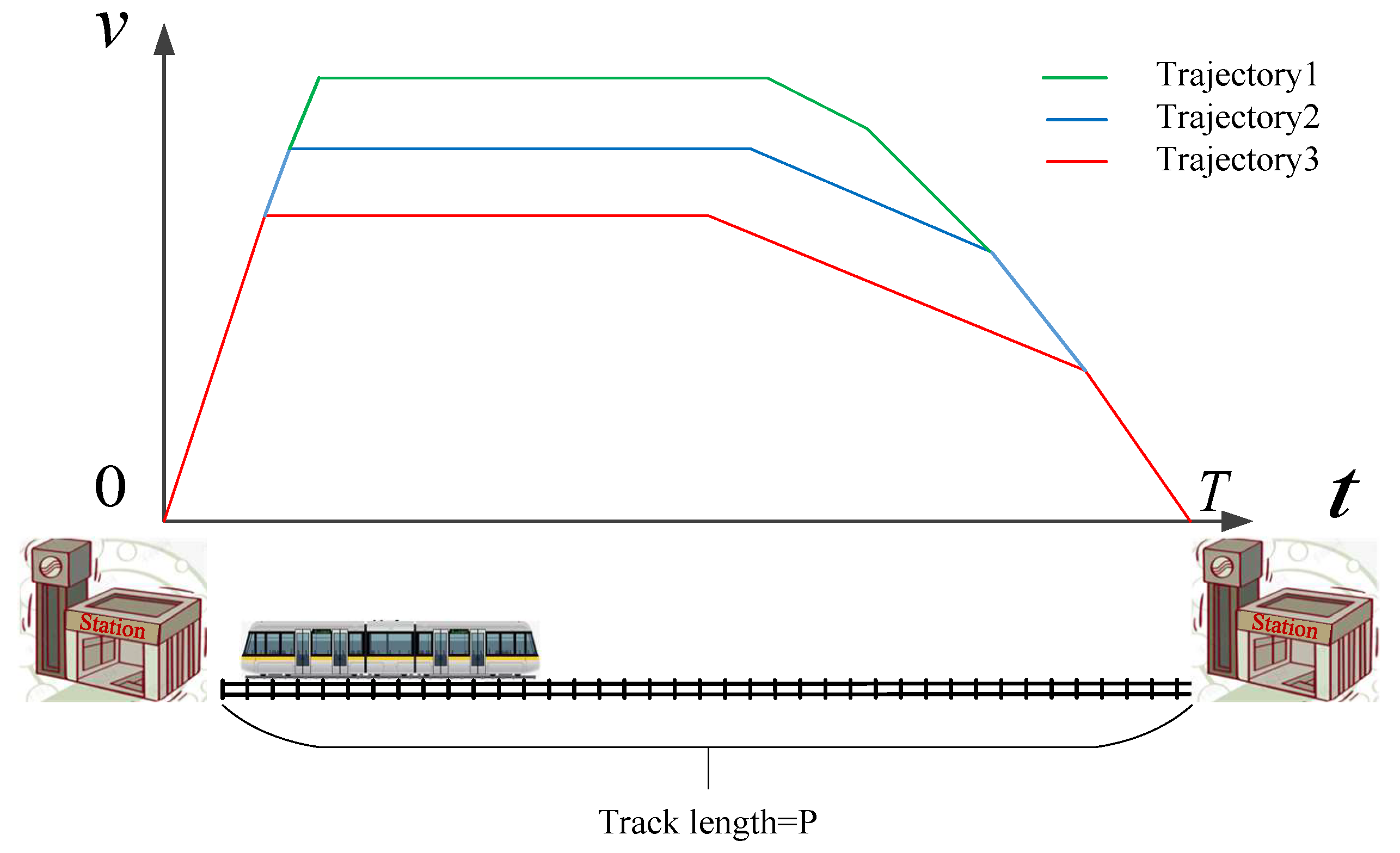
2. The Optimal Train Control Problem
3. Online Energy-Saving Driving Strategy Based on MPC of Switched-Mode Systems
3.1. Train Switched-Mode Dynamical Model
3.2. Optimization of Switching Times via MPC
4. Solution Algorithm Development
| Algorithm 1 Online computation of . |
| Require: track length P, running time T, current state |
| Ensure:, |
|
5. Case Studies
5.1. Parameter Setting
- kg.
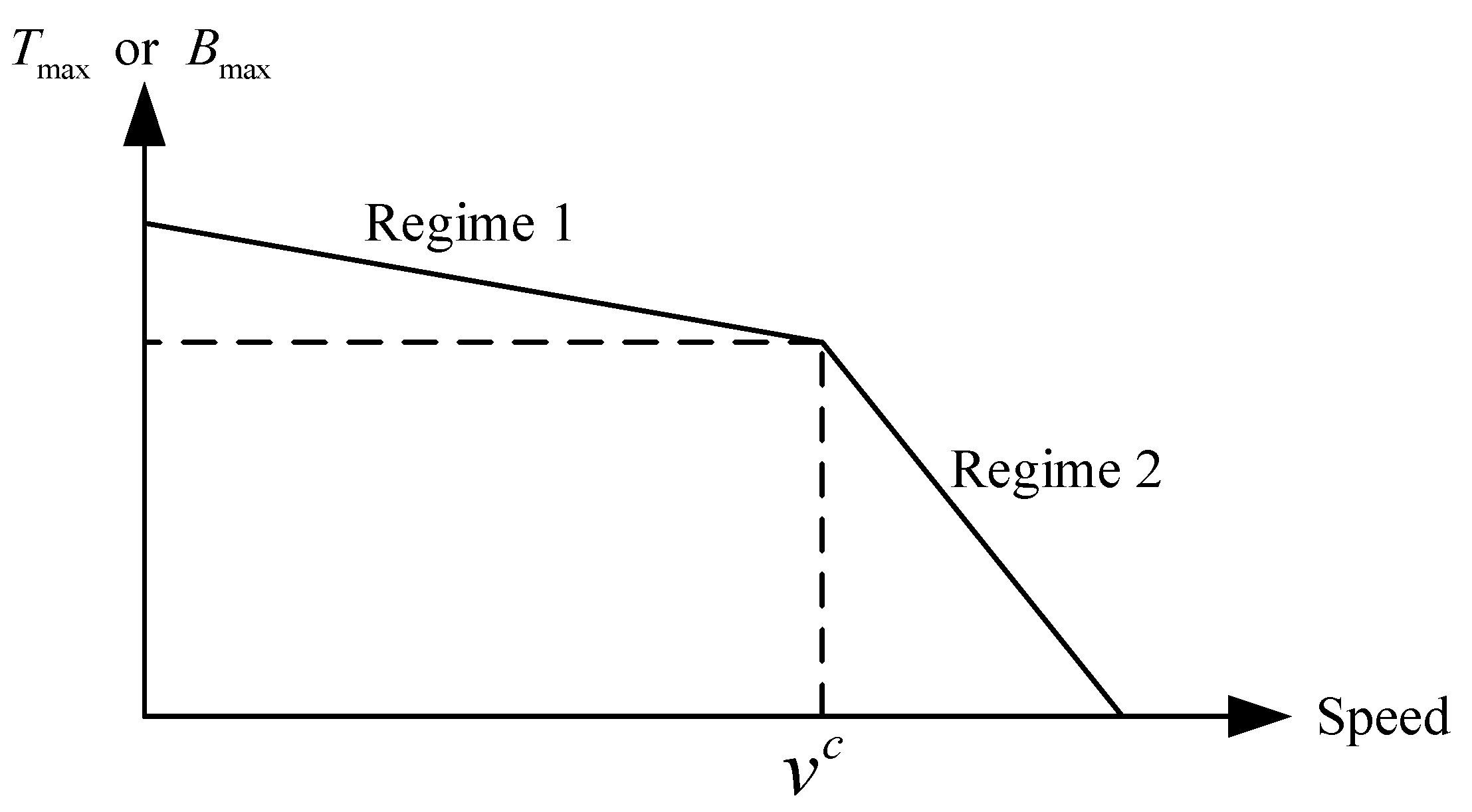
- The maximum traction force is given as follows.
- The maximum electrical braking force is calculated by:
- The running resistance can be calculated by:
- The efficiency factor .
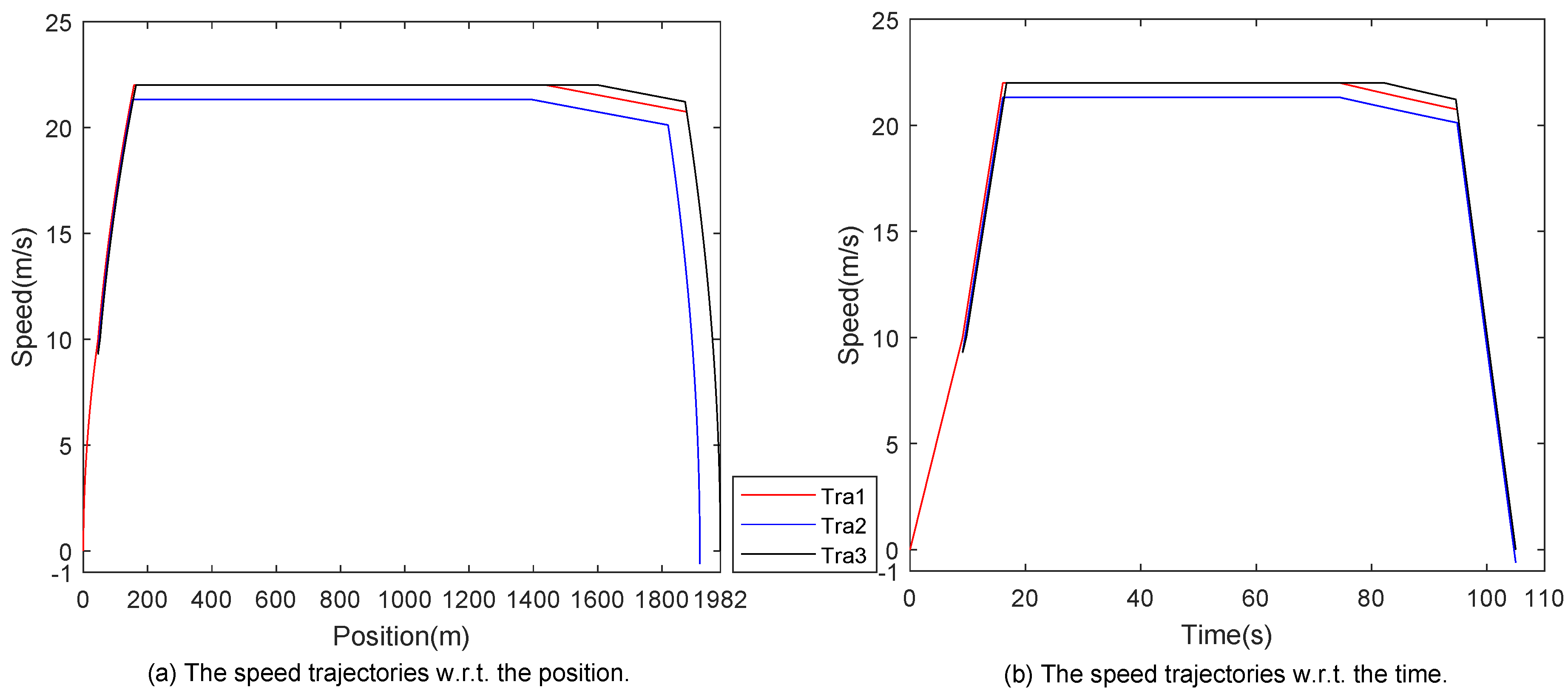
5.2. Inter-Station Run with Fixed Running Time
5.3. Analysis of Different Running Times
5.4. Analysis with Disturbance
5.5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning |
|---|---|
| v | speed of the train |
| p | position of the train |
| M | the total mass of the train |
| u | the instantaneous force applied to the train |
| R | the resistance force |
| the coefficients of basic running resistance | |
| G | the gradient resistance along the track |
| g | the gravitational acceleration |
| the upper speed limit | |
| the maximum tractive force | |
| the maximum braking force | |
| P | the length between two adjacent stations |
| T | the given running time |
| the switching time | |
| x | the state of the system |
| L | the power function for train |
| the efficiency factor | |
| the sampling instant | |
| the sampling period |
References
- Yang, X.; Li, X.; Ning, B.; Tang, T. A Survey on Energy-Efficient Train Operation for Urban Rail Transit. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2–13. [Google Scholar] [CrossRef]
- González-Gil, A.; Palacin, R.; Batty, P.; Powell, J.P. A systems approach to reduce urban rail energy consumption. Energy Convers. Manag. 2014, 80, 509–524. [Google Scholar] [CrossRef]
- Yazhemsky, D.; Rashid, M.; Sirouspour, S. An On-Line Optimal Controller for a Commuter Train. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1112–1125. [Google Scholar] [CrossRef]
- Ishikawa, K. Application of optimization theory for bounded state variable problems to the operation of trains. Bull. Jpn. Soc. Mech. Eng. 1968, 11, 857–865. [Google Scholar] [CrossRef]
- Milroy, I.P. Aspects of Automatic Train Control. Ph.D. Thesis, Loughborough University, Loughborough, UK, 1980. [Google Scholar]
- Howlett, P. Optimal strategies for the control of a train. Automatica 1996, 32, 519–532. [Google Scholar] [CrossRef]
- Liu, R.R.; Golovitcher, I.M. Energy-efficient operation of rail vehicles. Transp. Res. Part A Policy Pract. 2003, 37, 917–932. [Google Scholar] [CrossRef]
- Albrecht, A.; Howlett, P.; Pudney, P.; Xuan, V.; Zhou, P. The key principles of optimal train control-Part 1: Formulation of the model, strategies of optimal type, evolutionary lines, location of optimal switching points. Transp. Res. B Methodol. 2016, 94, 482–508. [Google Scholar] [CrossRef]
- Albrecht, A.; Howlett, P.; Pudney, P.; Xuan, V.; Zhou, P. The key principles of optimal train control-Part 2: Existence of an optimal strategy, the local energy minimization principle, uniqueness, computational techniques. Transp. Res. B Methodol. 2015, 94, 509–538. [Google Scholar] [CrossRef]
- Ko, H.; Koseki, T.; Miyatake, M. Application of dynamic programming to the optimization of the running profile of a train. Comput. Railw. 2004, 45, 8. [Google Scholar]
- Lu, S.; Hillmansen, S.; Ho, T.K.; Roberts, C. Single-Train Trajectory Optimization. IEEE Trans. Intell. Transp. Syst. 2013, 14, 743–750. [Google Scholar] [CrossRef]
- Haahr, J.T.; Pisinger, D.; Sabbaghian, M. A dynamic programming approach for optimizing train speed profiles with speed restrictions and passage points. Transp. Res. Part B Methodol. 2017, 99, 167–182. [Google Scholar] [CrossRef]
- Wang, Y.; de Schutter, B.; van den Boom, T.J.; Ning, B. Optimal trajectory planning for trains—A pseudospectral method and a mixed integer linear programming approach. Transp. Res. Part C Emerg. Technol. 2013, 29, 97–114. [Google Scholar] [CrossRef]
- Ye, H.; Liu, R. Nonlinear programming methods based on closed-form expressions for optimal train control. Transp. Res. Part C Emerg. Technol. 2017, 82, 102–123. [Google Scholar] [CrossRef]
- Youneng, H.; Xiao, M.; Shuai, S.; Tao, T. Optimization of Train Operation in Multiple Interstations with Multi-Population Genetic Algorithm. Energies 2015, 8, 14311–14329. [Google Scholar]
- Ke, B.; Chen, M.; Lin, C. Block-Layout Design Using MAX–MIN Ant System for Saving Energy on Mass Rapid Transit Systems. IEEE Trans. Intell. Transp. Syst. 2009, 10, 226–235. [Google Scholar]
- Scheepmaker, G.M.; Goverde, R.M.; Kroon, L.G. Review of energy-efficient train control and timetabling. Eur. J. Oper. Res. 2017, 257, 355–376. [Google Scholar] [CrossRef]
- Yin, J.; Tao, T.; Yang, L.; Jing, X.; Gao, Z. Research and development of automatic train operation for railway transportation systems: A survey. Transp. Res. C Emerg. Technol. 2017, 85, 548–572. [Google Scholar] [CrossRef]
- Yan, X.; Cai, B.; Ning, B.; ShangGuan, W. Moving Horizon Optimization of Dynamic Trajectory Planning for High-Speed Train Operation. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1258–1270. [Google Scholar] [CrossRef]
- Yan, X.; Cai, B.; Ning, B.; Wei, S.G. Online distributed cooperative model predictive control of energy-saving trajectory planning for multiple high-speed train movements. Transp. Res. Part C Emerg. Technol. 2016, 69, 60–78. [Google Scholar] [CrossRef]
- Liu, X.; Xun, J.; Ning, B.; Liu, T.; Xiao, X. Moving Horizon Optimization of Train Speed Profile Based on Sequential Quadratic Programming. In Proceedings of the 2018 International Conference on Intelligent Rail Transportation (ICIRT), Singapore, 12–14 December 2018; pp. 1–5. [Google Scholar]
- He, D.; Zhou, L.; Sun, Z. Energy-efficient receding horizon trajectory planning of high-speed trains using real-time traffic information. Control Theory Technol. 2020, 18, 204–216. [Google Scholar] [CrossRef]
- Le, Y.W.; Beydoun, A.; Cook, J.; Jing, S.; Kolmanovsky, I. Optimal Hybrid Control With Applications to Automotive Powertrain Systems; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Beydoun, A.; Le, Y.W.; Jing, S.; Sivashanka, S. Hybrid Control of Automotive Powertrain Systems: A Case Study; Springer: Berlin/Heidelberg, Germany, 1998. [Google Scholar]
- Liang, L.; Wei, D.; Ji, Y.; Zhang, Z.; Lang, T. Minimal-Energy Driving Strategy for High-Speed Electric Train with Hybrid System Model. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1642–1653. [Google Scholar]
- Branicky, M.S.; Borkar, V.S.; Mitter, S.K. A unified framework for hybrid control: Model and optimal control theory. IEEE Trans. Autom. Control 1998, 43, 31–45. [Google Scholar] [CrossRef]
- Ding, X.C.; Wardi, Y.; Egerstedt, M. On-Line Optimization of Switched-Mode Dynamical Systems. IEEE Trans. Autom. Control. 2007, 54, 2266–2271. [Google Scholar] [CrossRef]
- Li, L.; Dong, W.; Ji, Y.; Zhang, Z. A minimal-energy driving strategy for high-speed electric train. J. Control Theory Appl. 2012, 10, 280–286. [Google Scholar] [CrossRef]
- Lu, S.; Hillmansen, S.; Roberts, C. A power-management strategy for multiple-unit railroad vehicles. IEEE Trans. Veh. Technol. 2010, 60, 406–420. [Google Scholar] [CrossRef]
- Azuma, S.I.; Egerstedt, M.; Wardi, Y. Output-based optimal timing control of switched systems. In Proceedings of the International Workshop on Hybrid Systems: Computation and Control, LNCS, Santa Barbara, CA, USA, 29–31 March 2006; Volume 3927, pp. 64–78. [Google Scholar]
- Axelsson, H. Optimal Control of Switched Autonomous Systems: Theory, Algorithms, and Robotic Applications. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2006. [Google Scholar]







| Inter-Station | P (m) | T (s) | (m/s) |
|---|---|---|---|
| Jiugong–Yizhuangqiao | 1982 | 130 | 22.2 |
| Yizhuangqiao-Wenhuayuan | 993 | 90 | 22.2 |
| Inter-Station | ||||
|---|---|---|---|---|
| Jiugong–Yizhuangqiao | 14.4 | 14.4 | 122.9 | 11.27 |
| Yizhuangqiao–Wenhuayuan | 11 | 11 | 84.5 | 7.4 |
| T (s) | 105 | 110 | 115 | 120 |
|---|---|---|---|---|
| 16.1 | 16.1 | 16.1 | 15.4 | |
| 74.5 | 35.6 | 16.1 | 15.4 | |
| 94.8 | 101 | 106.6 | 112.1 | |
| 19.1 | 16.1 | 14.5 | 13.2 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, F.; Zhan, J.; Chen, Y. An Online Energy-Saving Driving Strategy for Metro Train Operation Based on the Model Predictive Control of Switched-Mode Dynamical Systems. Energies 2020, 13, 4933. https://doi.org/10.3390/en13184933
Shang F, Zhan J, Chen Y. An Online Energy-Saving Driving Strategy for Metro Train Operation Based on the Model Predictive Control of Switched-Mode Dynamical Systems. Energies. 2020; 13(18):4933. https://doi.org/10.3390/en13184933
Chicago/Turabian StyleShang, Fei, Jingyuan Zhan, and Yangzhou Chen. 2020. "An Online Energy-Saving Driving Strategy for Metro Train Operation Based on the Model Predictive Control of Switched-Mode Dynamical Systems" Energies 13, no. 18: 4933. https://doi.org/10.3390/en13184933
APA StyleShang, F., Zhan, J., & Chen, Y. (2020). An Online Energy-Saving Driving Strategy for Metro Train Operation Based on the Model Predictive Control of Switched-Mode Dynamical Systems. Energies, 13(18), 4933. https://doi.org/10.3390/en13184933