DPsim—Advancements in Power Electronics Modelling Using Shifted Frequency Analysis and in Real-Time Simulation Capability by Parallelization



Abstract
1. Introduction
2. Theoretical Background
3. Models and Methods
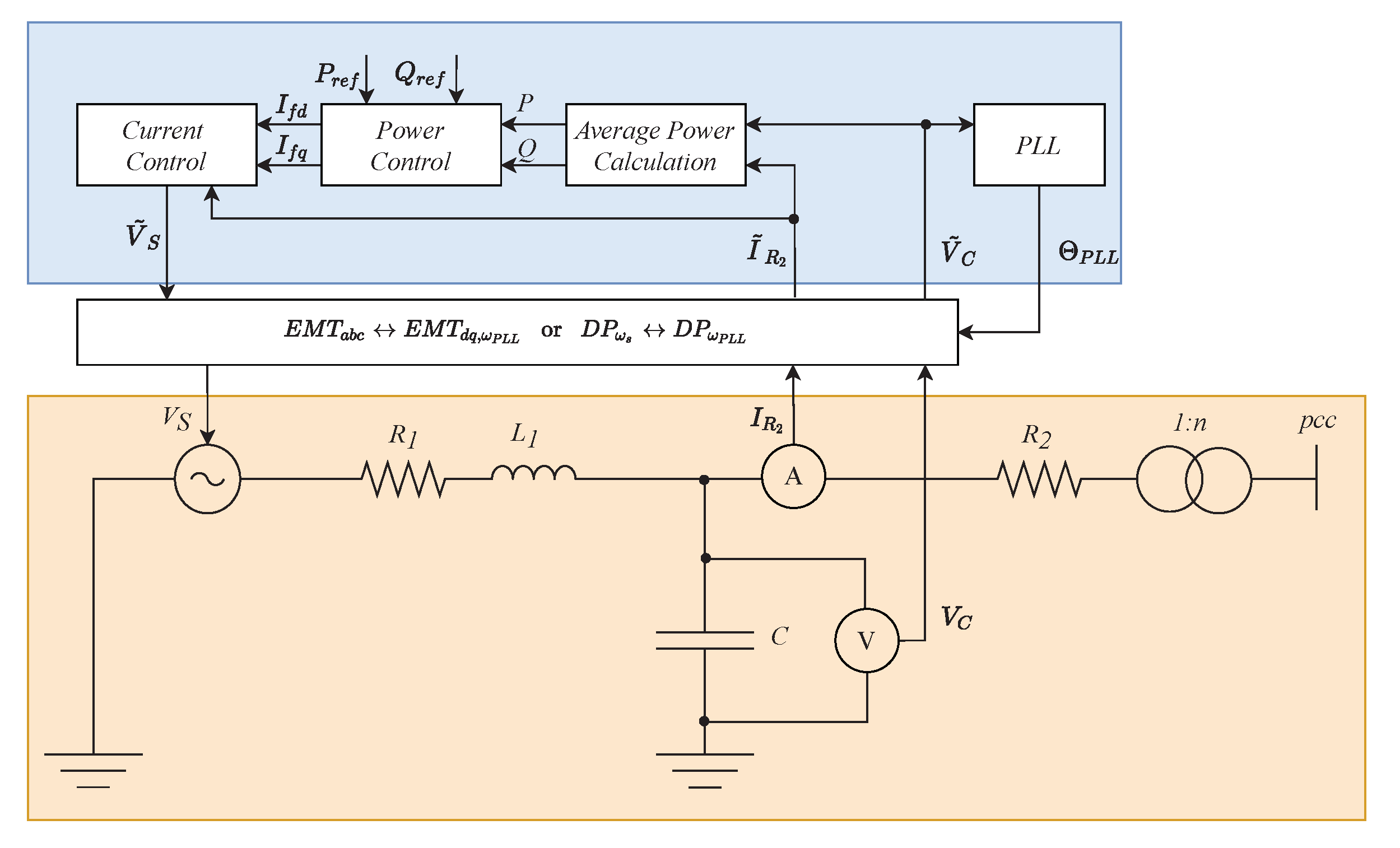
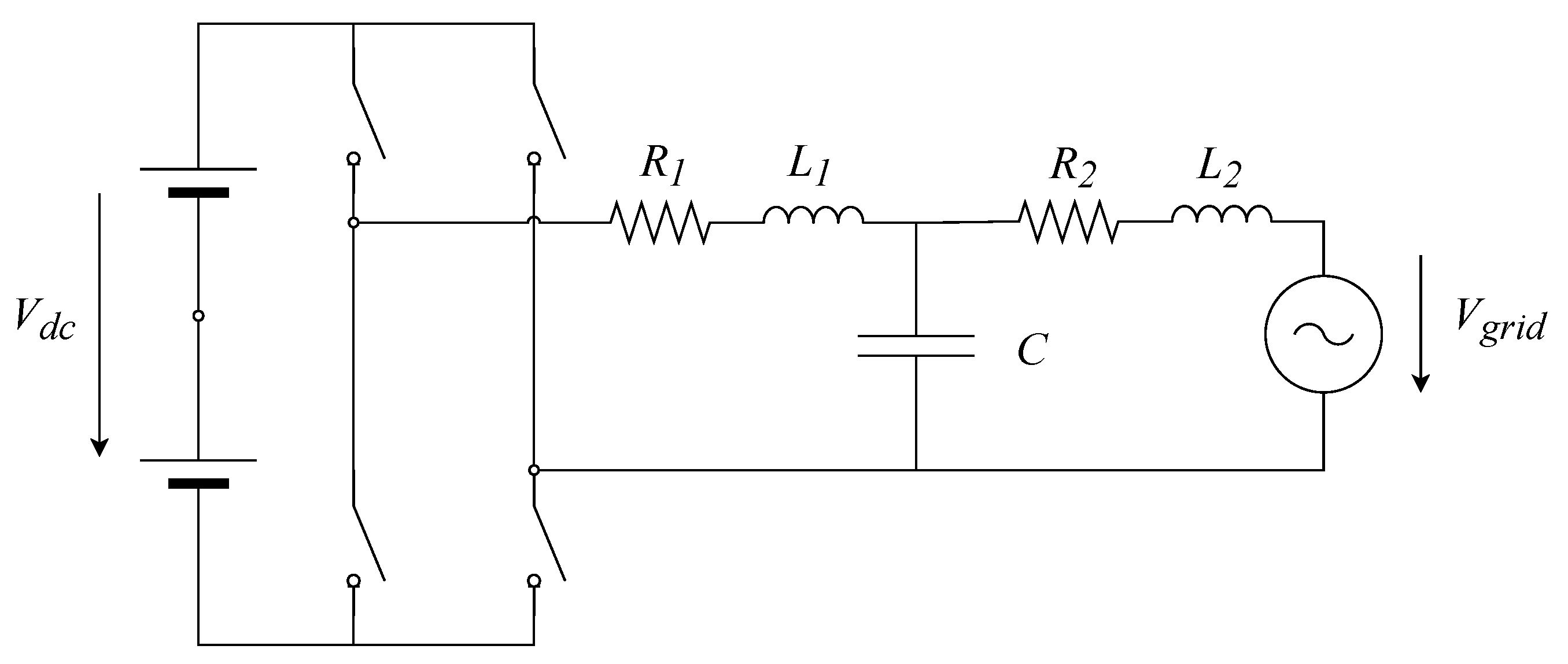
3.1. Averaged Inverter Model with Controls
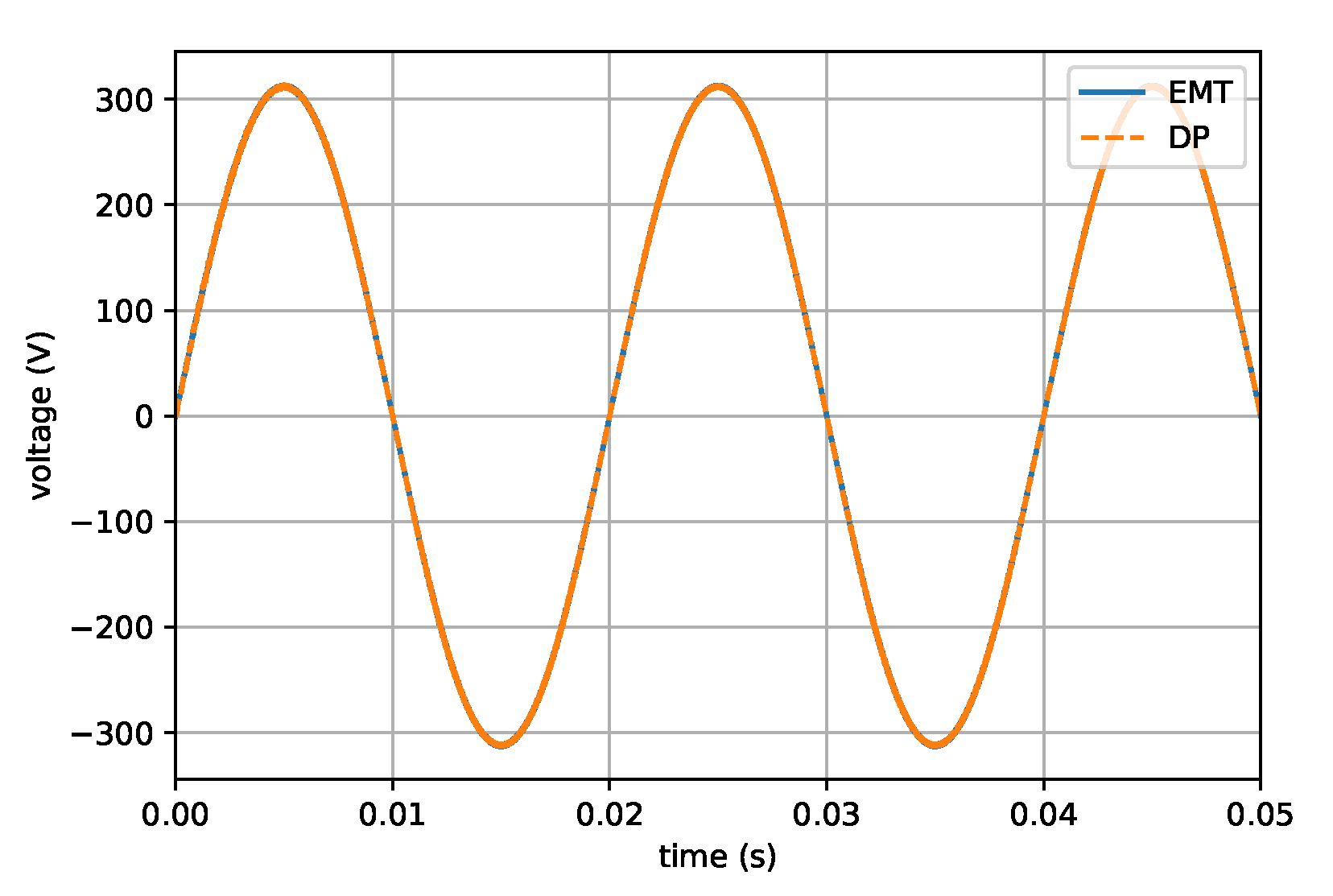
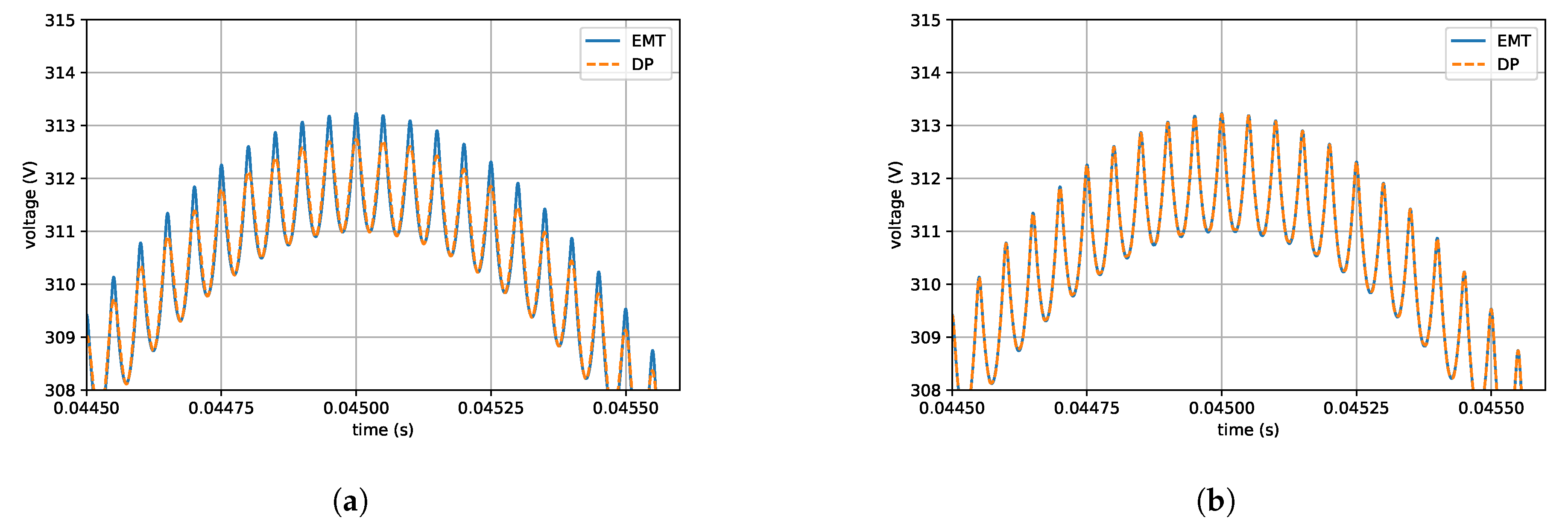
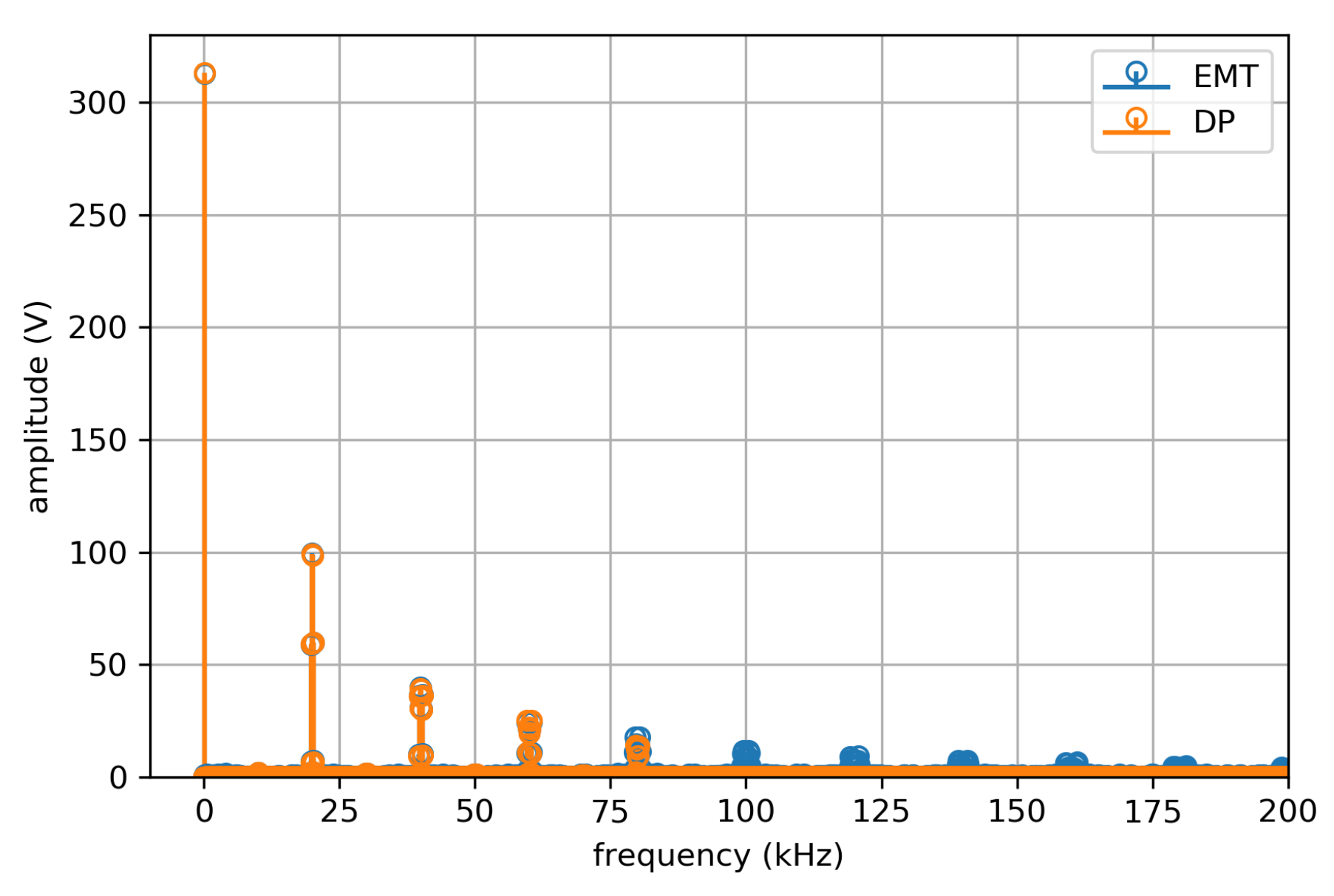
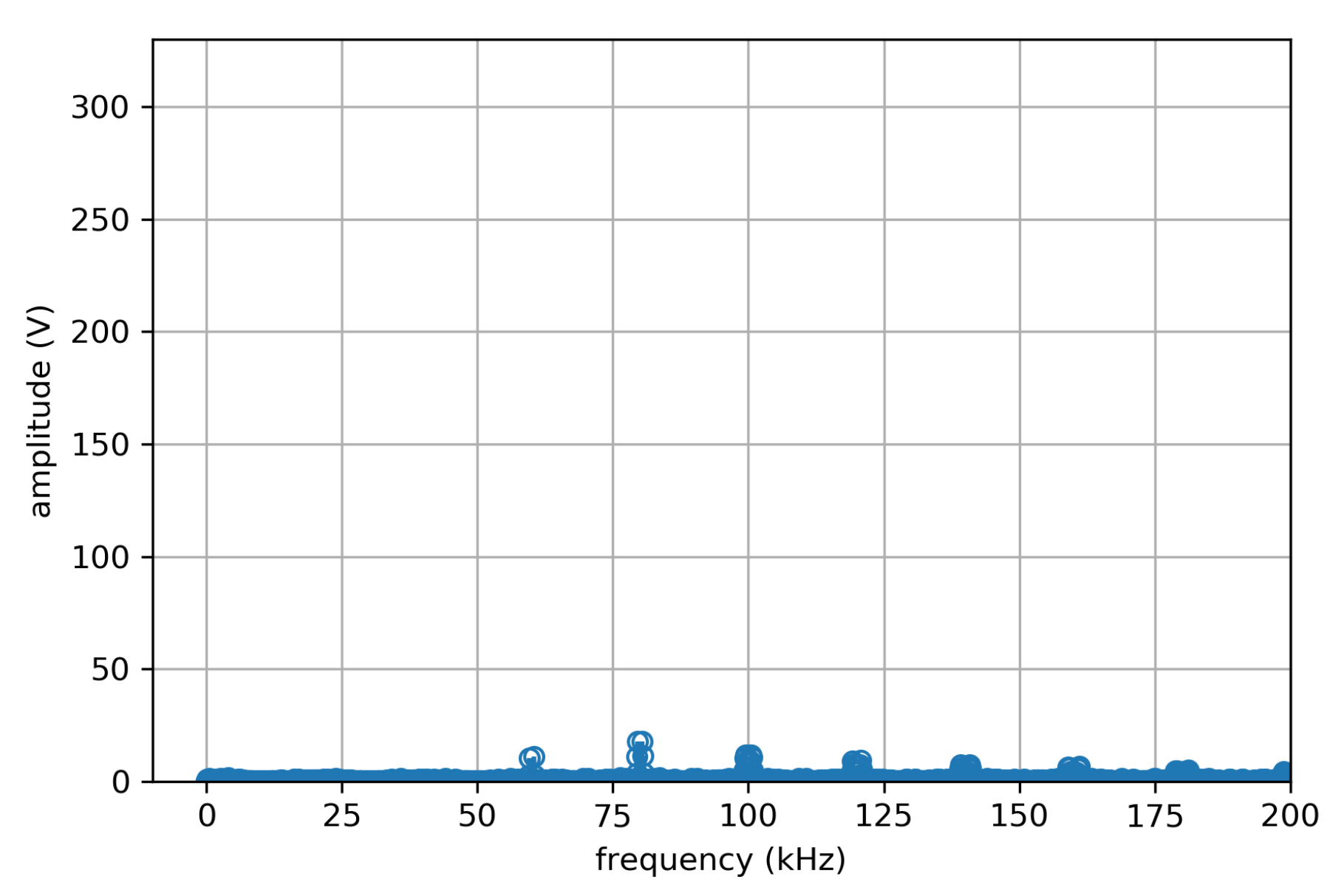
3.2. Inverter Model Including Harmonics
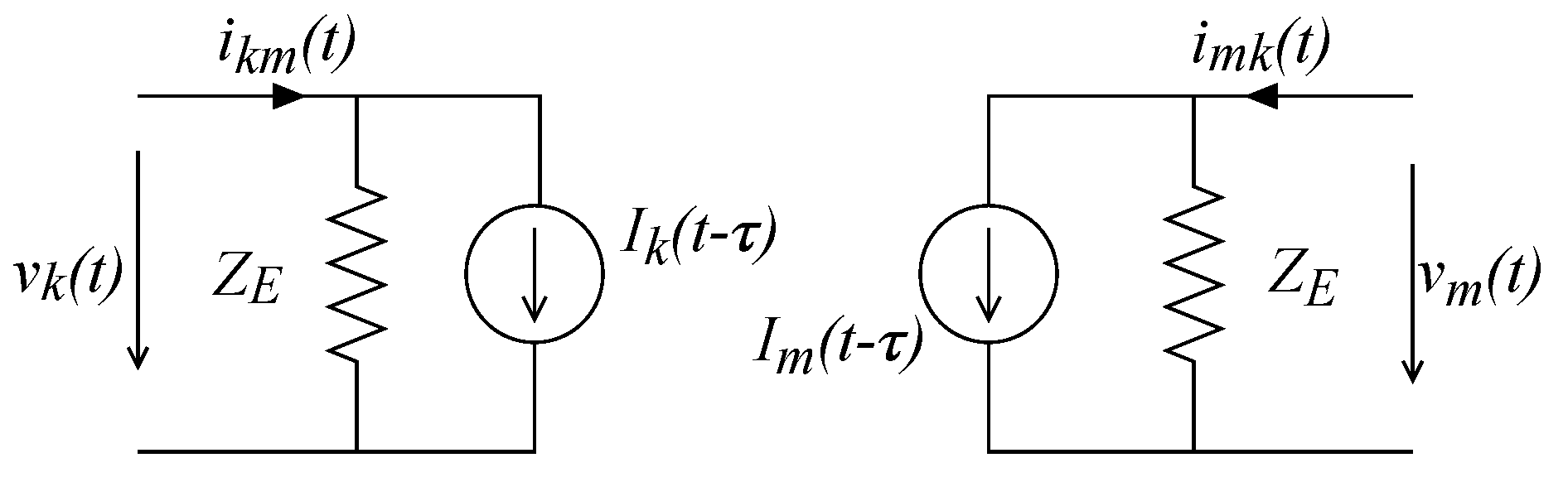
3.3. Transmission Line
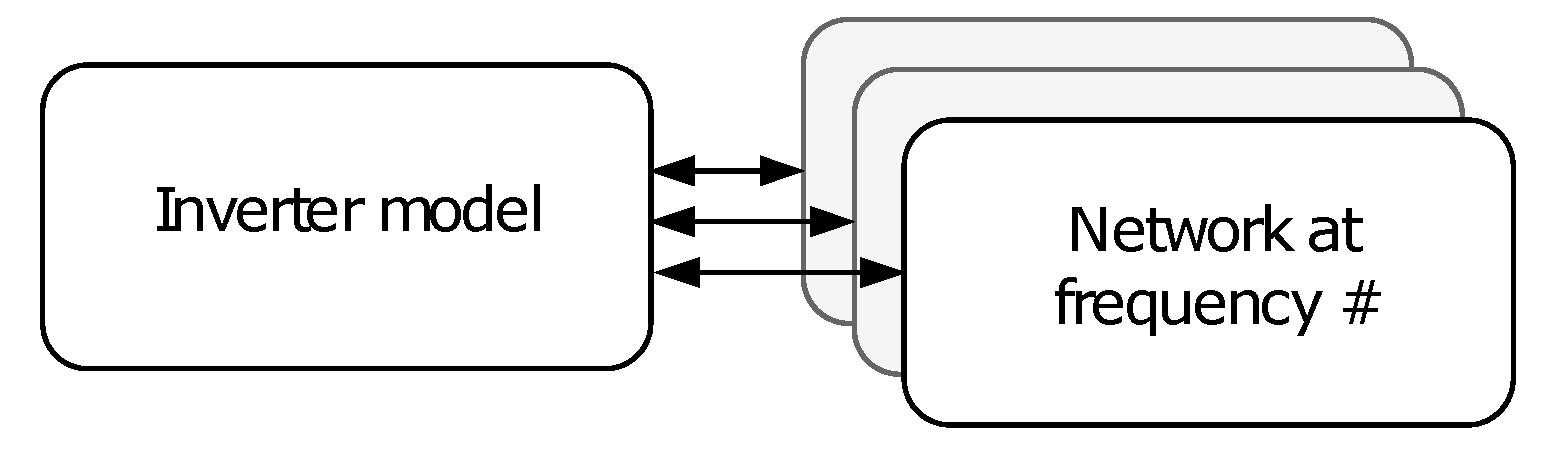
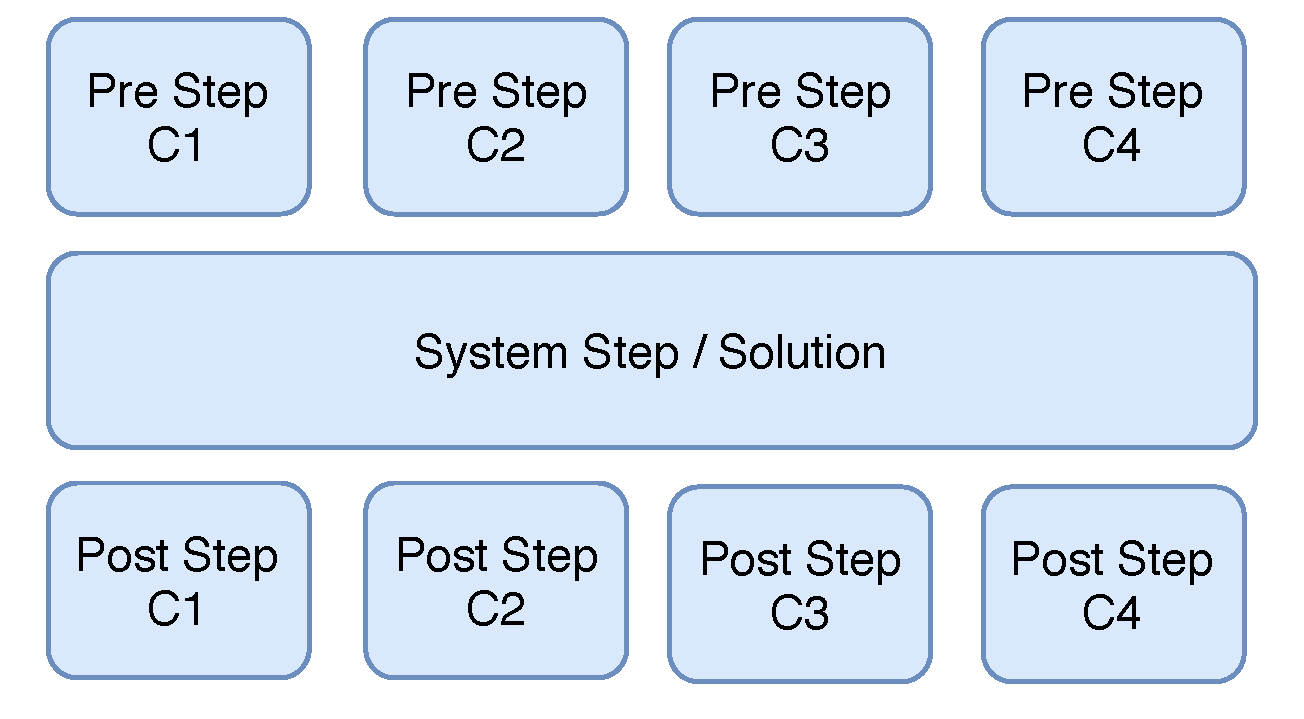
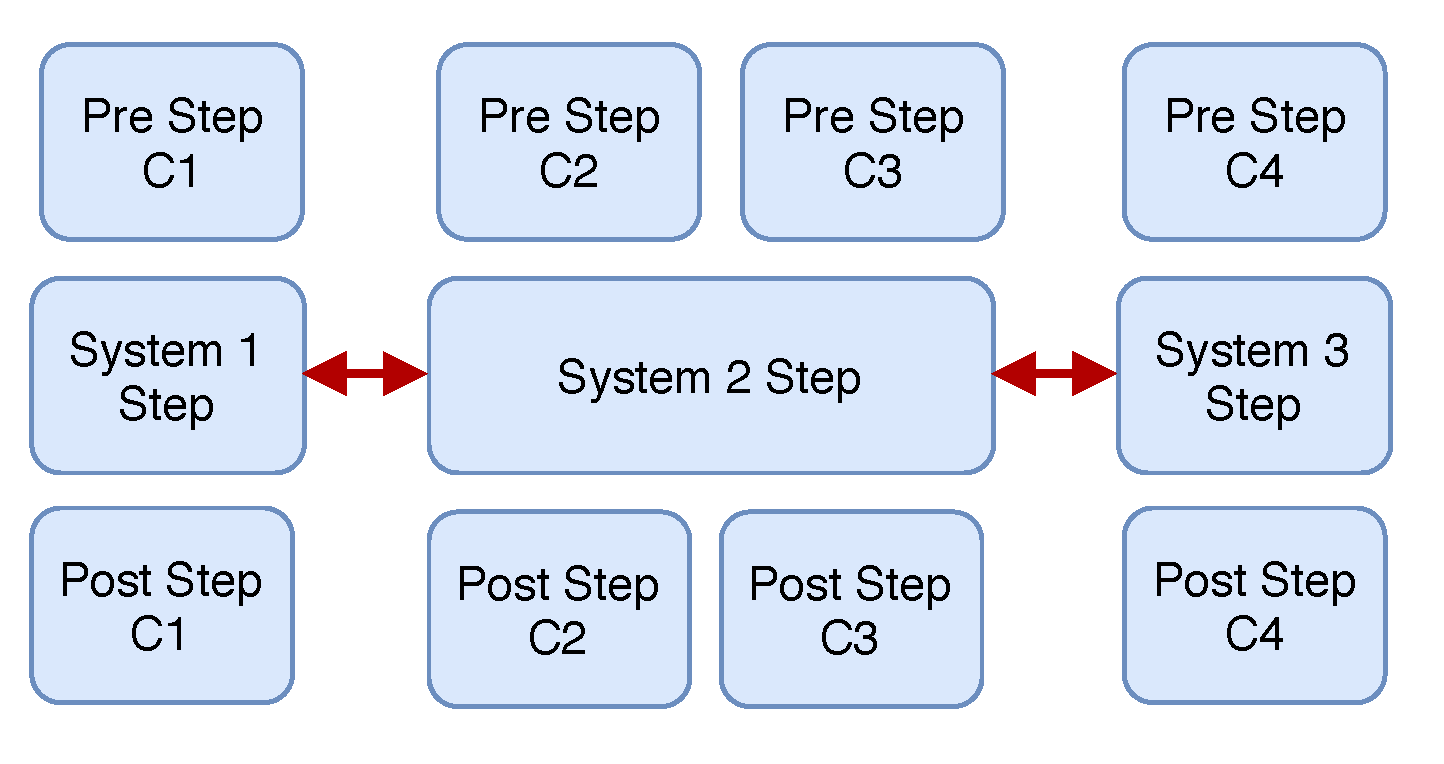
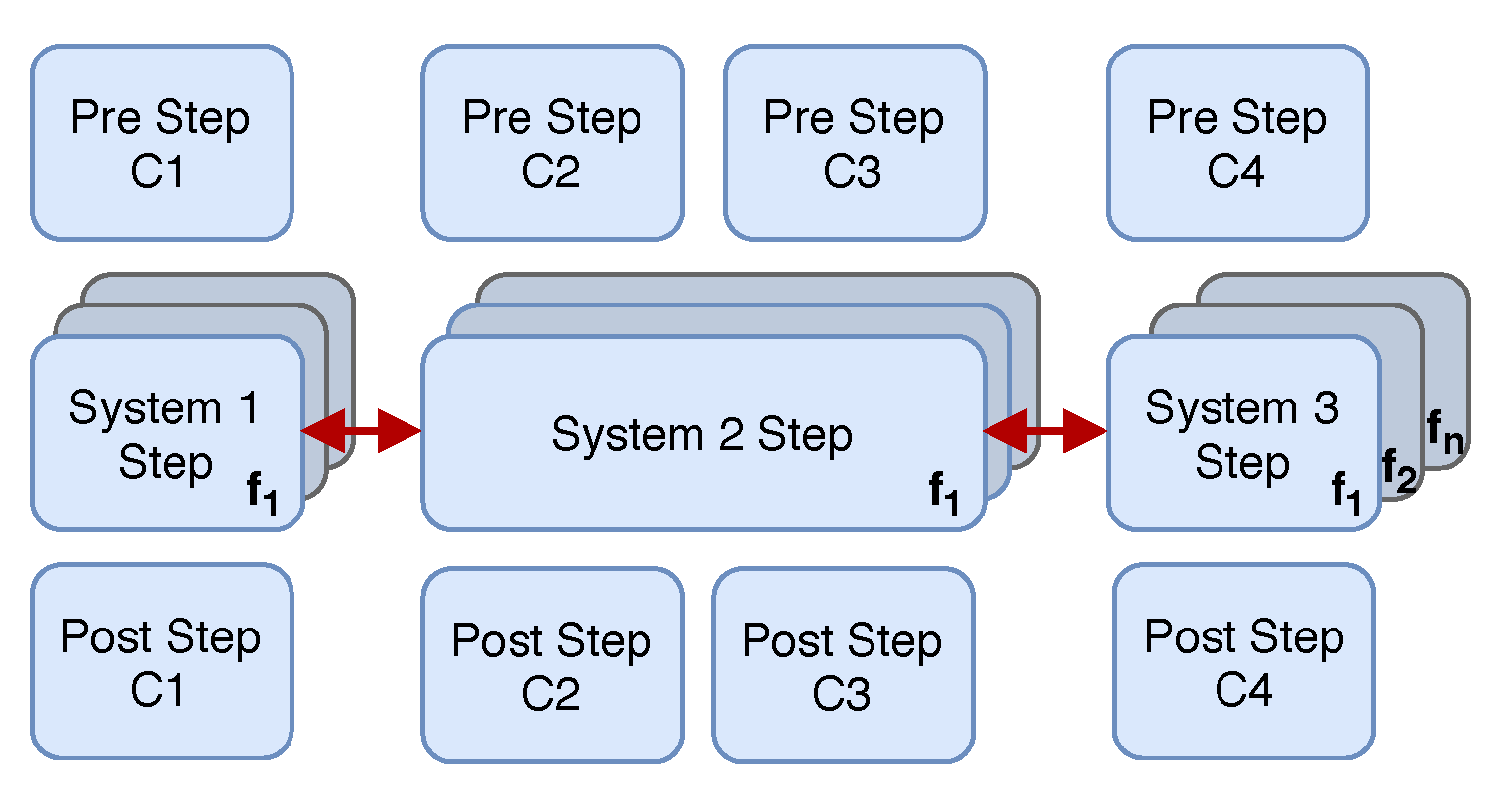
3.4. Parallelization of Subsystems and Frequency Bands
- calculating component states required for the network solution,
- solving the network,
- updating remaining component states from the network solution.
4. Results
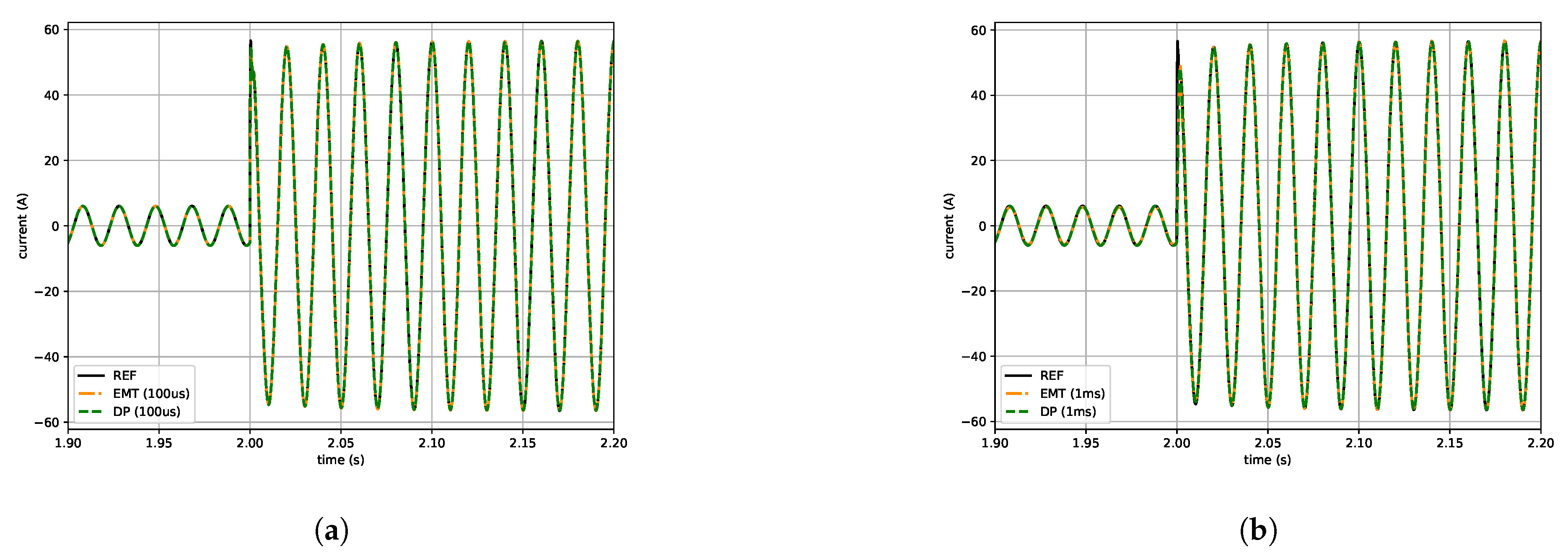
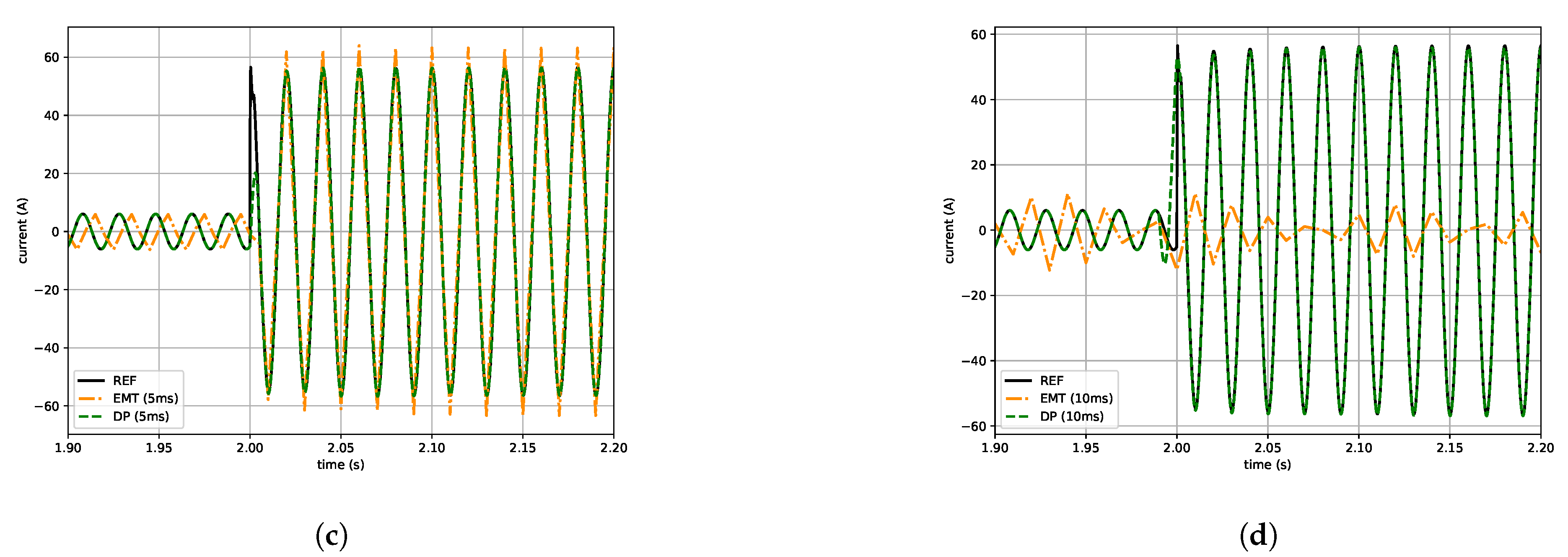
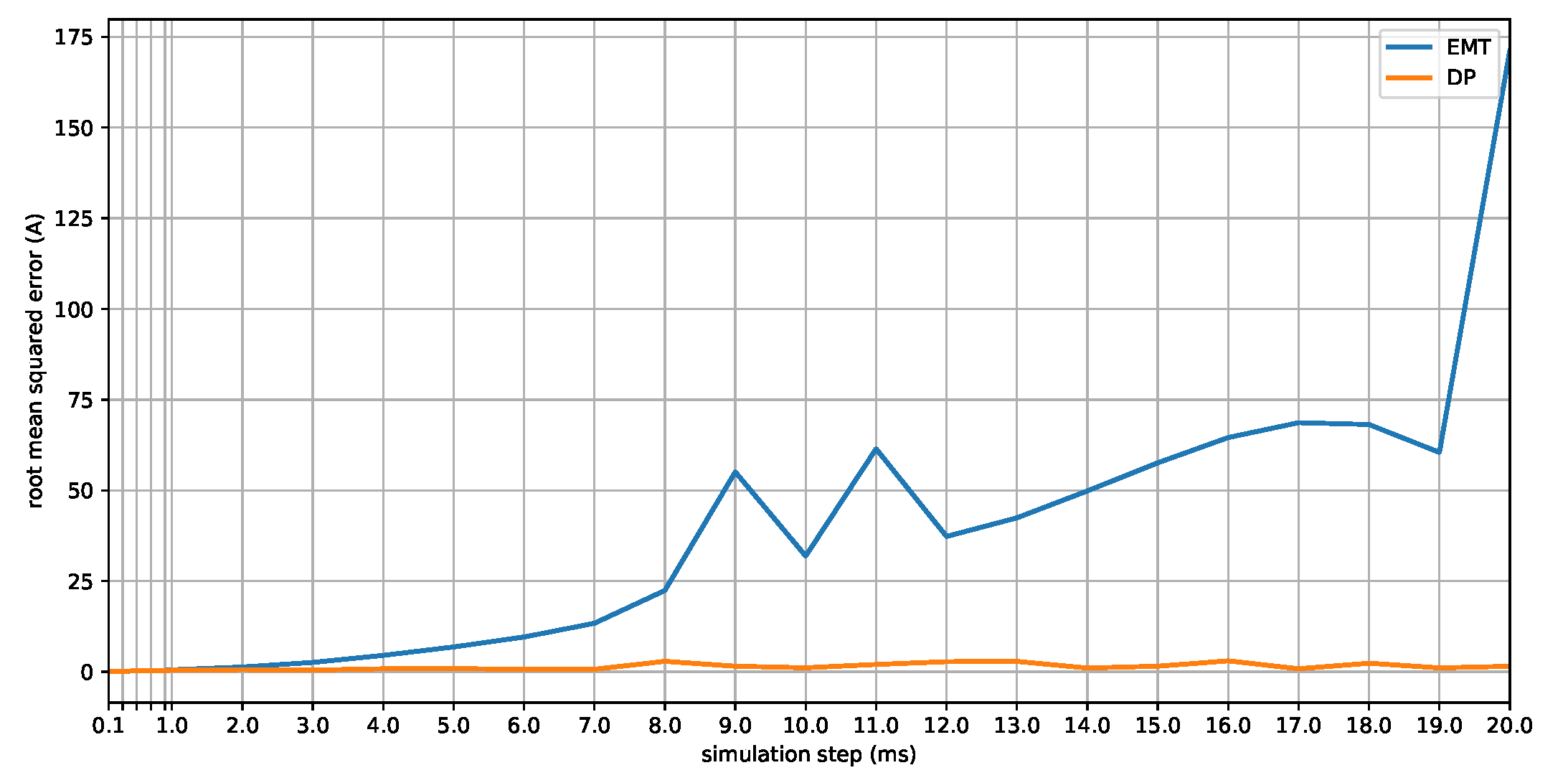
4.1. Averaged Inverter Model with Controls
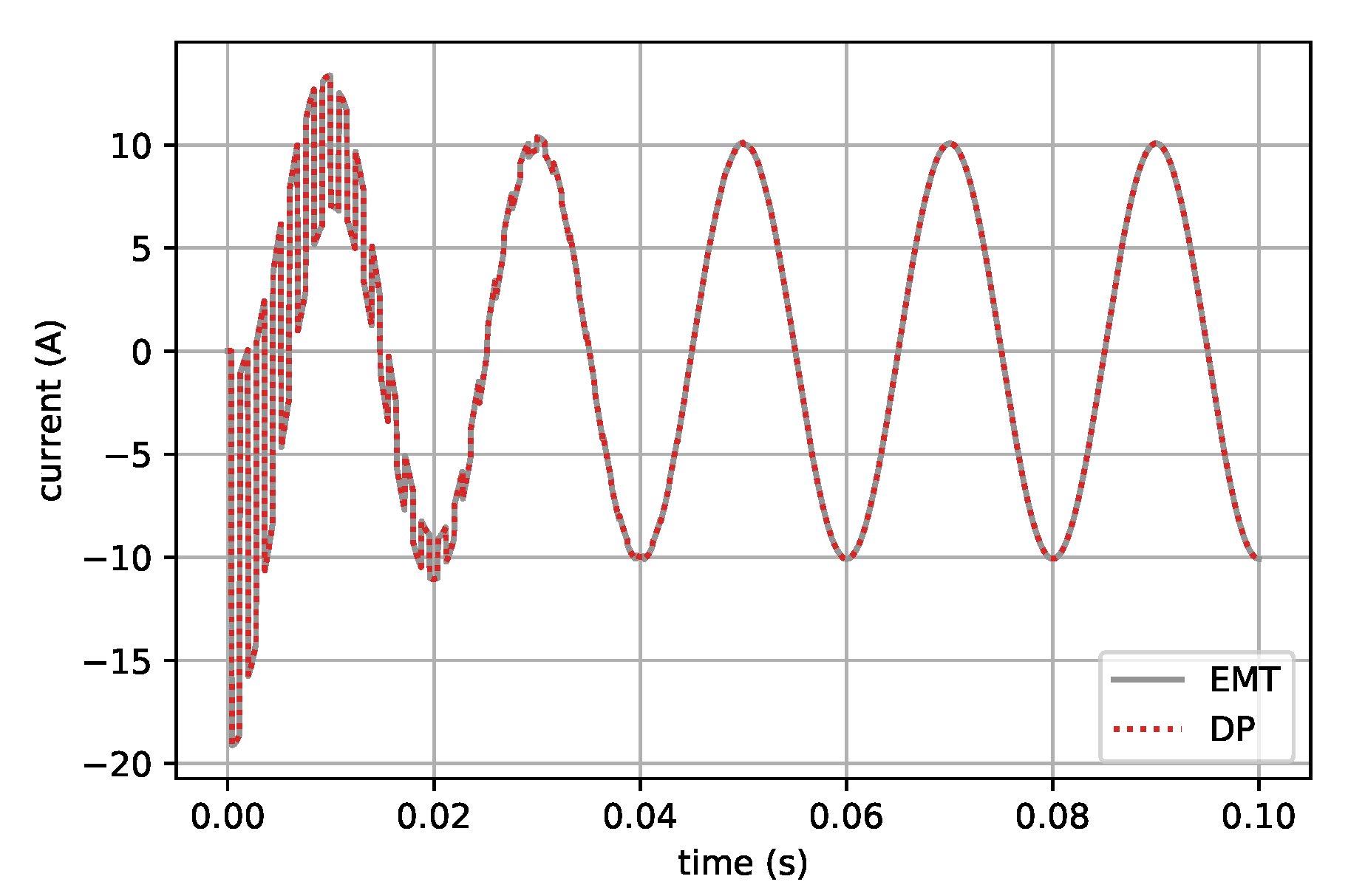
4.2. Inverter Model Including Harmonics
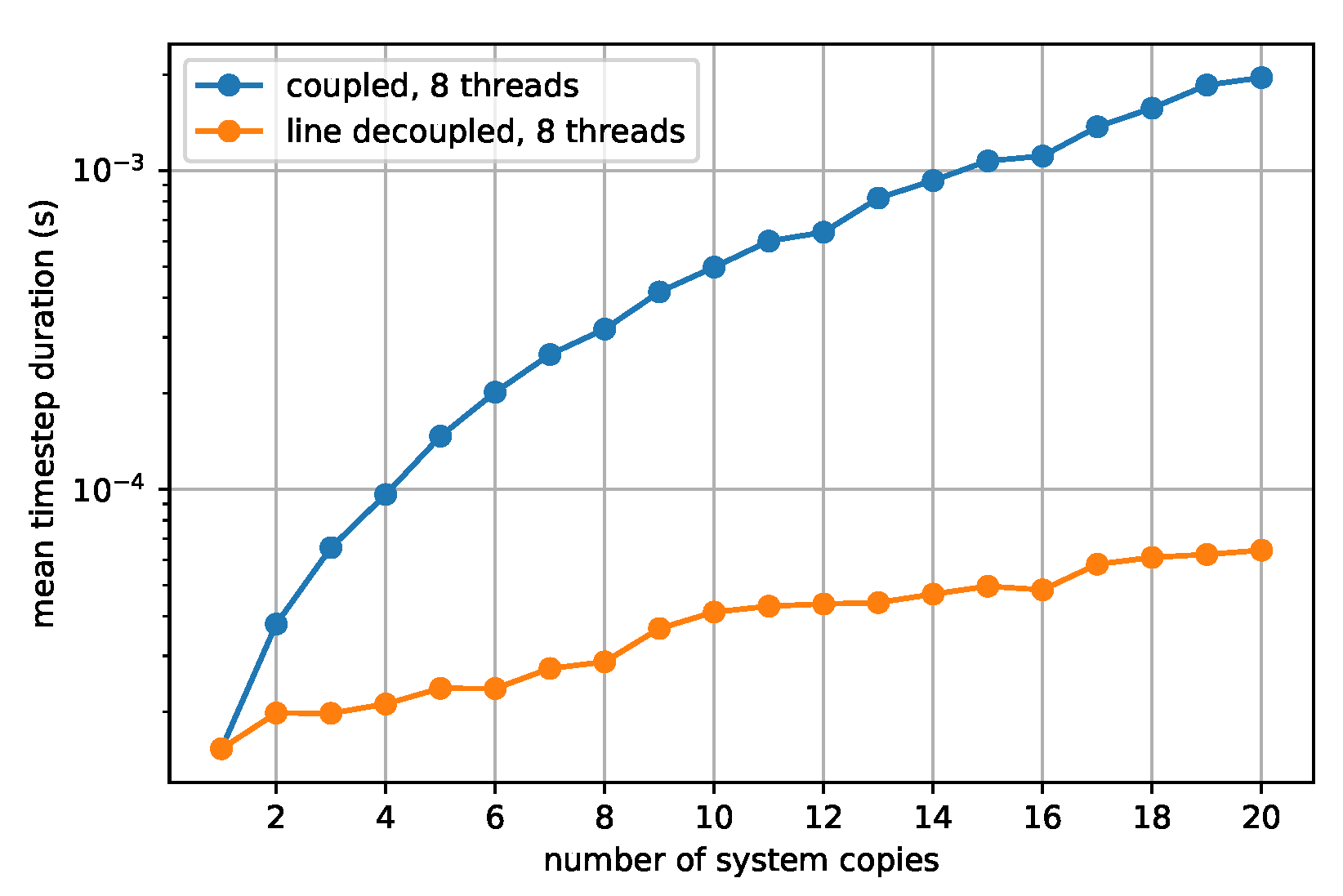
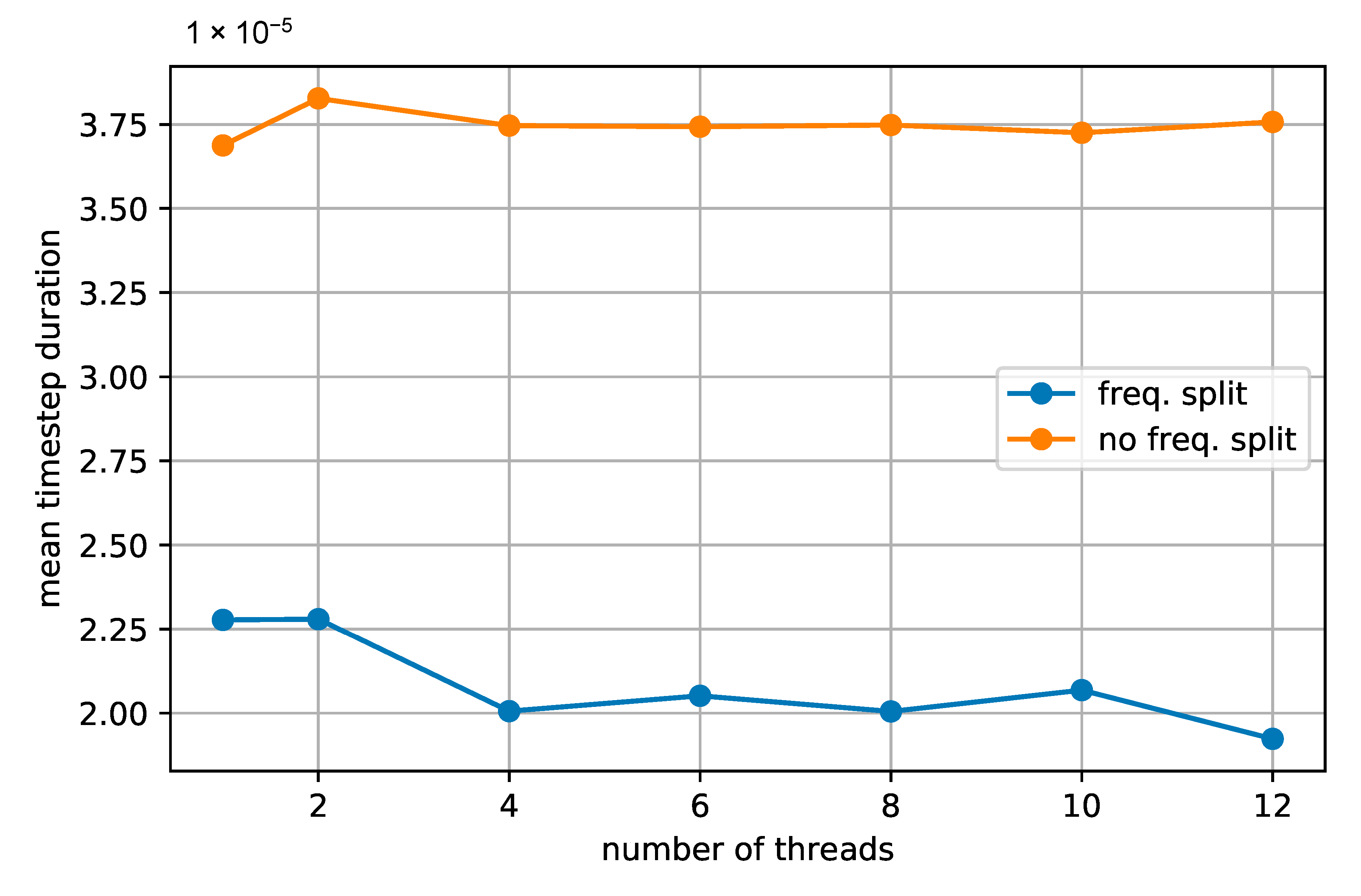
4.3. Parallelization for Large Systems and Power Electronics
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Faruque, M.O.; Strasser, T.; Lauss, G.; Jalili-Marandi, V.; Forsyth, P.; Dufour, C.; Dinavahi, V.; Monti, A.; Kotsampopoulos, P.; Martinez, J.A.; et al. Real-time simulation technologies for power systems design, testing, and analysis. IEEE Power Energy Technol. Syst. J. 2015, 2, 63–73. [Google Scholar] [CrossRef]
- Chen, Y.; Dinavahi, V. FPGA-based real-time EMTP. IEEE Trans. Power Deliv. 2008, 24, 892–902. [Google Scholar] [CrossRef]
- Razzaghi, R.; Paolone, M.; Rachidi, F. A general purpose FPGA-based real-time simulator for power systems applications. In Proceedings of the IEEE PES ISGT Europe 2013, Lyngby, Denmark, 6–9 October 2013; pp. 1–5. [Google Scholar]
- Milton, M.; Benigni, A.; Bakos, J. System-level, FPGA-based, real-time simulation of ship power systems. IEEE Trans. Energy Convers. 2017, 32, 737–747. [Google Scholar] [CrossRef]
- Li, Q.; Xiang, Y.; Mu, Q.; Zhang, X.; Li, X.; He, G. Exploration of FPGA-based electromagnetic transient real-time simulation system design using high-level synthesis. J. Eng. 2018, 2019, 1217–1220. [Google Scholar] [CrossRef]
- Hernandez, M.E.; Ramos, G.A.; Lwin, M.; Siratarnsophon, P.; Santoso, S. Embedded real-time simulation platform for power distribution systems. IEEE Access 2017, 6, 6243–6256. [Google Scholar] [CrossRef]
- Marti, J.R.; Dommel, H.W.; Bonatto, B.D.; Barrete, A.F. Shifted Frequency Analysis (SFA) concepts for EMTP modelling and simulation of Power System Dynamics. In Proceedings of the Power Systems Computation Conference (PSCC), Wroclaw, Poland, 18–22 August 2014; pp. 1–8. [Google Scholar]
- Strunz, K.; Shintaku, R.; Gao, F. Frequency-adaptive network modeling for integrative simulation of natural and envelope waveforms in power systems and circuits. IEEE Trans. Circuits Syst. Regul. Pap. 2006, 53, 2788–2803. [Google Scholar] [CrossRef]
- Demiray, T.; Andersson, G.; Busarello, L. Evaluation study for the simulation of power system transients using dynamic phasor models. In Proceedings of the 2008 IEEE/PES Transmission and Distribution Conference and Exposition: Latin America, Bogota, Colombia, 13–15 August 2008; pp. 1–6. [Google Scholar]
- Marti, A.T.J.; Jatskevich, J. Transient Stability Analysis Using Shifted Frequency Analysis (SFA). In Proceedings of the 2018 Power Systems Computation Conference (PSCC), Dublin, Ireland, 11–15 June 2018; pp. 1–7. [Google Scholar]
- Sanders, S.R.; Noworolski, J.M.; Liu, X.Z.; Verghese, G.C. Generalized averaging method for power conversion circuits. IEEE Trans. Power Electron. 1991, 6, 251–259. [Google Scholar] [CrossRef]
- Holmes, D.G.; Lipo, T.A. Pulse Width Modulation for Power Converters: Principles and Practice; John Wiley & Sons: Hoboken, NJ, USA, 2003; Volume 18. [Google Scholar]
- Stevic, M.; Estebsari, A.; Vogel, S.; Pons, E.; Bompard, E.; Masera, M.; Monti, A. Multi-site European framework for real-time co-simulation of power systems. IET Gener. Transm. Distrib. 2017, 11, 4126–4135. [Google Scholar] [CrossRef]
- Monti, A.; Stevic, M.; Vogel, S.; De Doncker, R.W.; Bompard, E.; Estebsari, A.; Profumo, F.; Hovsapian, R.; Mohanpurkar, M.; Flicker, J.D.; et al. A Global Real-Time Superlab: Enabling High Penetration of Power Electronics in the Electric Grid. IEEE Power Electron. Mag. 2018, 5, 35–44. [Google Scholar] [CrossRef]
- Mirz, M.; Vogel, S.; Reinke, G.; Monti, A. DPsim—A dynamic phasor real-time simulator for power systems. SoftwareX 2019, 10, 100253. [Google Scholar] [CrossRef]
- Vogel, S.; Mirz, M.; Razik, L.; Monti, A. An open solution for next-generation real-time power system simulation. In Proceedings of the 2017 IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 26–28 November 2017; pp. 1–6. [Google Scholar]
- Razik, L.; Mirz, M.; Knibbe, D.; Lankes, S.; Monti, A. Automated deserializer generation from CIM ontologies: CIM++—An easy-to-use and automated adaptable open-source library for object deserialization in C++ from documents based on user-specified UML models following the Common Information Model (CIM) standards for the energy sector. Comput. Sci. Res. Dev. 2018, 33, 93–103. [Google Scholar]
- Maas, S.A. Nonlinear Microwave and RF Circuits; Artech House: London, UK, 2003. [Google Scholar]
- Proakis, J.G.; Salehi, M.; Zhou, N.; Li, X. Communication Systems Engineering; Prentice Hall New Jersey: Upper Saddle River, NJ, USA, 1994; Volume 2. [Google Scholar]
- Henschel, S. Analysis of Electromagnetic and Electromechanical Power System Transients with Dynamic Phasors. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 1999. [Google Scholar]
- Zhang, P.; Marti, J.R.; Dommel, H.W. Shifted-frequency analysis for EMTP simulation of power-system dynamics. IEEE Trans. Circuits Syst. I Regul. Pap. 2010, 57, 2564–2574. [Google Scholar] [CrossRef]
- Demiray, T. Simulation of Power System Dynamics Using Dynamic Phasor Models. Ph.D. Thesis, ETH Zurich, Zurich, Switzerland, 2008. [Google Scholar]
- Dommel, H.W. Digital Computer Solution of Electromagnetic Transients in Single-and Multiphase Networks. IEEE Trans. Power Appar. Syst. 1969, PAS-88, 388–399. [Google Scholar] [CrossRef]
- Rocabert, J.; Luna, A.; Blaabjerg, F.; Rodríguez, P. Control of Power Converters in AC Microgrids. IEEE Trans. Power Electron. 2012, 27, 4734–4749. [Google Scholar] [CrossRef]
- Watson, N.; Arrillaga, J.; Arrillaga, J. Power Systems Electromagnetic Transients Simulation; IET: Stevenage, UK, 2003; Volume 39. [Google Scholar]
- Ruehli, A.; Brennan, P. The modified nodal approach to network analysis. IEEE Trans. Circuits Syst. 1975, 22, 504–509. [Google Scholar]
- Benigni, A.; Monti, A. A parallel approach to real-time simulation of power electronics systems. IEEE Trans. Power Electron. 2014, 30, 5192–5206. [Google Scholar] [CrossRef]
- de Siqueira, J.C.G.; Bonatto, B.D.; Martí, J.R.; Hollman, J.A.; Dommel, H.W. Optimum time step size and maximum simulation time in EMTP-based programs. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014; pp. 1–7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Value |
|---|---|
| 2 | |
| C | |
| Attribute | Value |
|---|---|
| 100 | |
| R | 5 |
| L | |
| C | 1 |
| 10 |
| Attribute | Value |
|---|---|
| 600 | |
| 150 | |
| C | 10 |
| 1 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirz, M.; Dinkelbach, J.; Monti, A. DPsim—Advancements in Power Electronics Modelling Using Shifted Frequency Analysis and in Real-Time Simulation Capability by Parallelization. Energies 2020, 13, 3879. https://doi.org/10.3390/en13153879
Mirz M, Dinkelbach J, Monti A. DPsim—Advancements in Power Electronics Modelling Using Shifted Frequency Analysis and in Real-Time Simulation Capability by Parallelization. Energies. 2020; 13(15):3879. https://doi.org/10.3390/en13153879
Chicago/Turabian StyleMirz, Markus, Jan Dinkelbach, and Antonello Monti. 2020. "DPsim—Advancements in Power Electronics Modelling Using Shifted Frequency Analysis and in Real-Time Simulation Capability by Parallelization" Energies 13, no. 15: 3879. https://doi.org/10.3390/en13153879
APA StyleMirz, M., Dinkelbach, J., & Monti, A. (2020). DPsim—Advancements in Power Electronics Modelling Using Shifted Frequency Analysis and in Real-Time Simulation Capability by Parallelization. Energies, 13(15), 3879. https://doi.org/10.3390/en13153879