Distributed Resilient Voltage and Reactive Power Control for Islanded Microgrids under False Data Injection Attacks

Abstract
1. Introduction
2. Secondary Voltage and Reactive Power Control for Islanded Microgrids
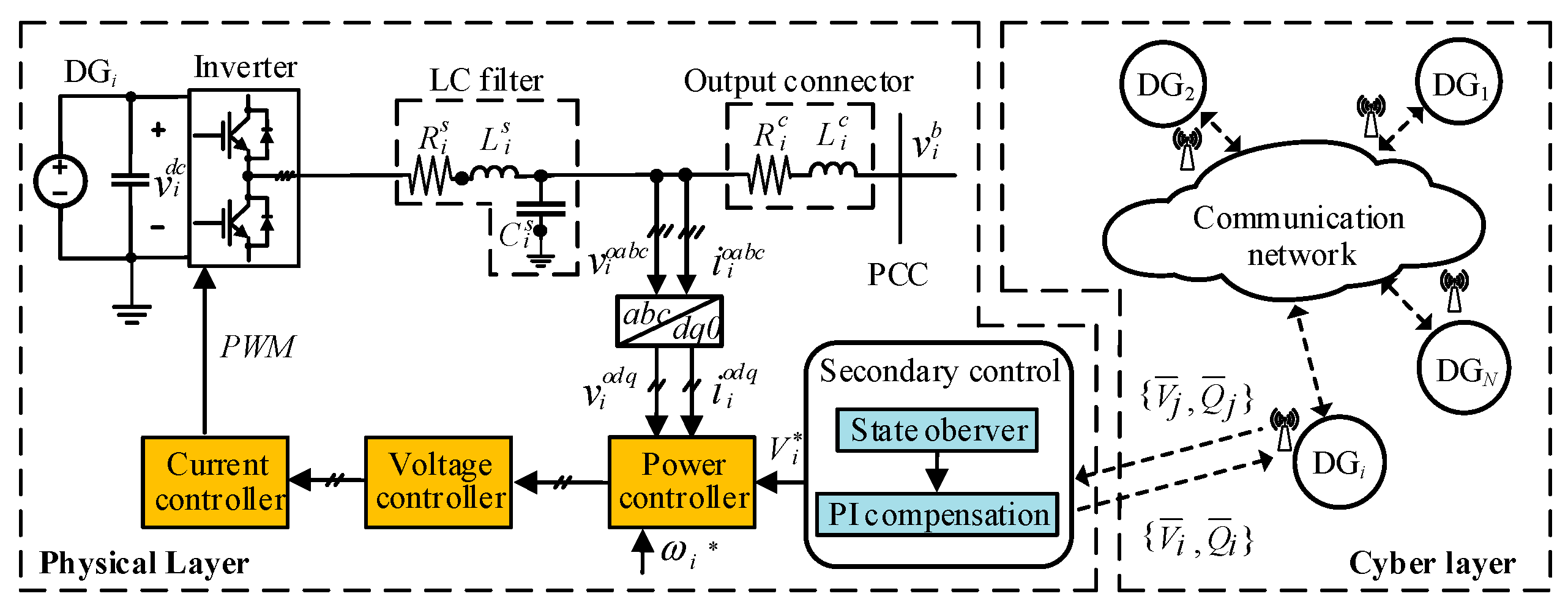
2.1. Cyber-Physical Model of Islanded Microgrids
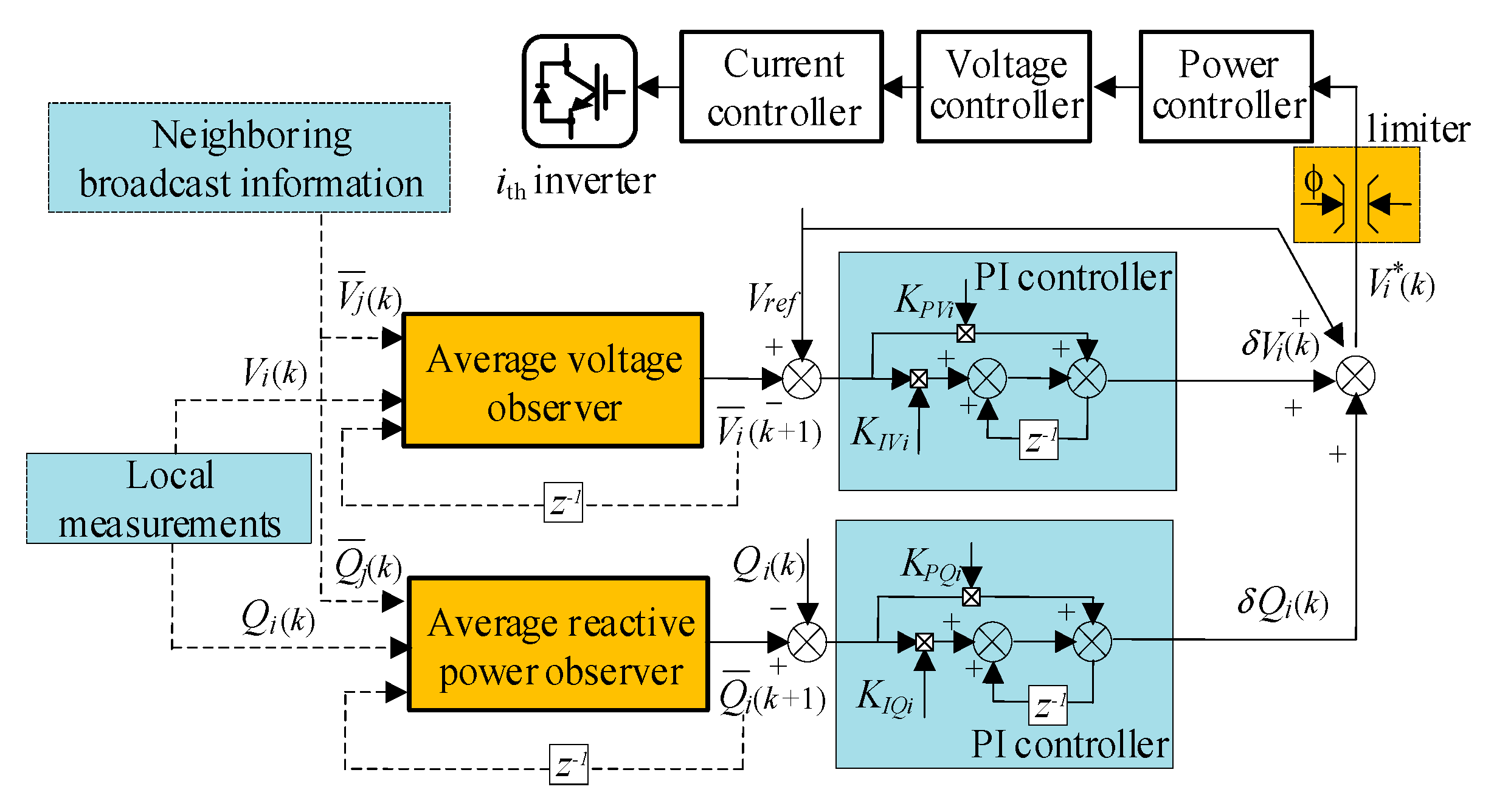
2.2. Distributed Secondary Control Framework for Voltage and Reactive Power
3. Vulnerability Analysis of the Distributed Control Scheme Subject to FDI Attack
4. Trust-Based Resilient Control Framework for Microgrids against FDI Attack
4.1. Misbehaving DG Detection Phase
4.2. Trust Evaluation Phase
4.3. Malicious DGs Indentification Phase
4.4. Mitigation and Recovery Phase
| Algorithm 1. Trust-based resilient control framework for voltage and reactive power control. |
| At iteration k 1. Misbehavior detection: () detects ’s misbehavior according to (15). 2. Trust evaluation: () updates the trust index according to (17). 3. Group decision-making: relies on the trust indexes from the other neighbors of to form a collaborative opinion . 4. Information discarding: At a certain iteration , if the common trust value starts to decrease, discards the information from and updates according to (19). 5. compares with the isolation threshold . If , go to step 6; otherwise, go to step 7. // Transient disturbance scenario // 6. Recovery action for disturbance: If increase above ( i.e., ), asks to resend information about iteration and takes recovery action according to (20), go to step 10. // Continuous FDI attack scenario // 7. Recovery action for isolation: identifies as a malicious DG and sets . is isolated from the cooperative network, the adverse effect of is eliminated by recovery action (27). 8. performs self-monitoring to detect whether the attack is over. If starts to increase, the deactivated links from is restored back. can receive information from to perform neighbor-monitoring. 9. Recovery action for rejoining: If increases above re-identifies as a normal DG. rejoins the cooperative network, both and take recovery action according to (28). 10. Repeats for . |
5. Simulation Results and Discussion
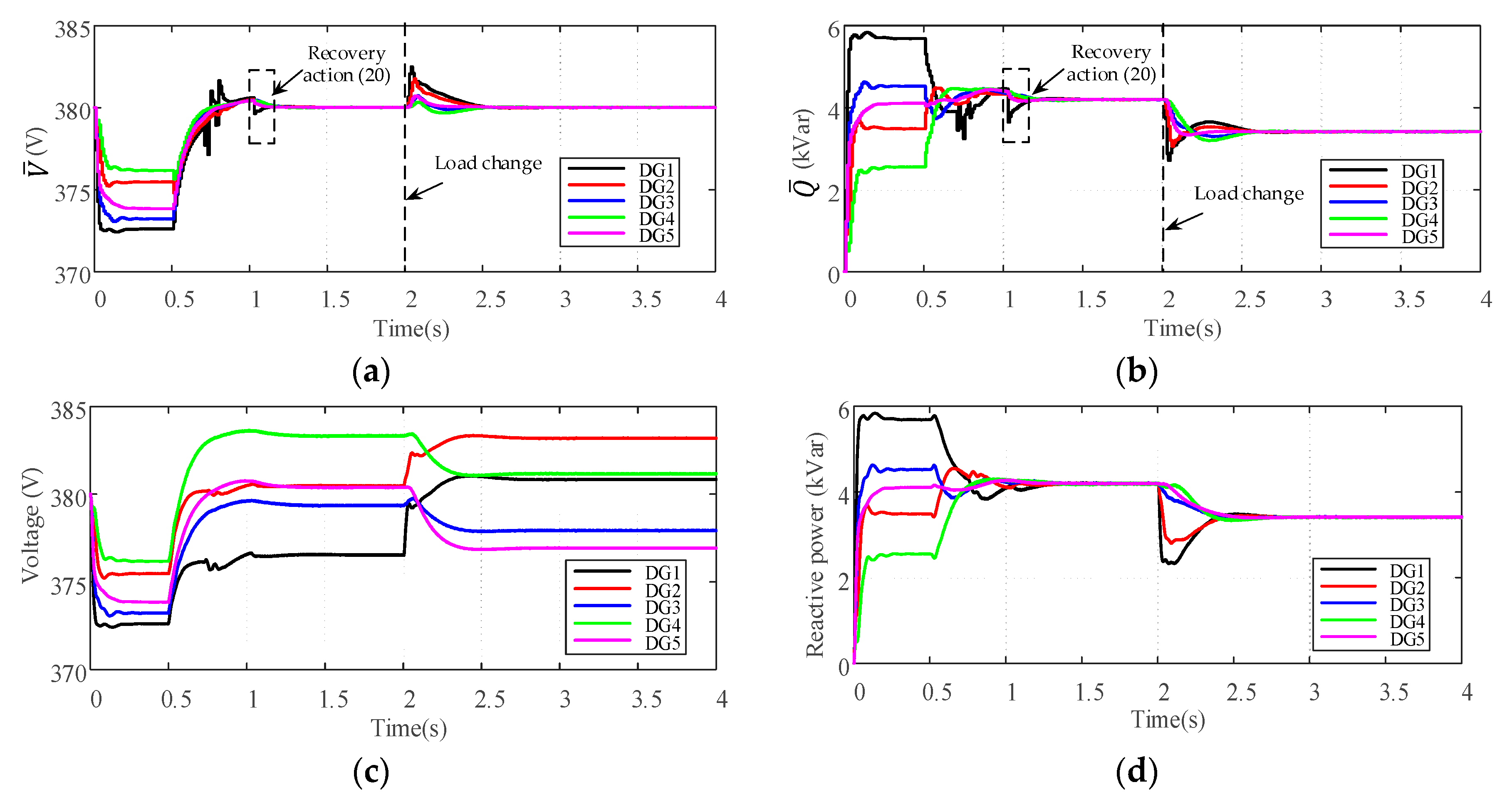
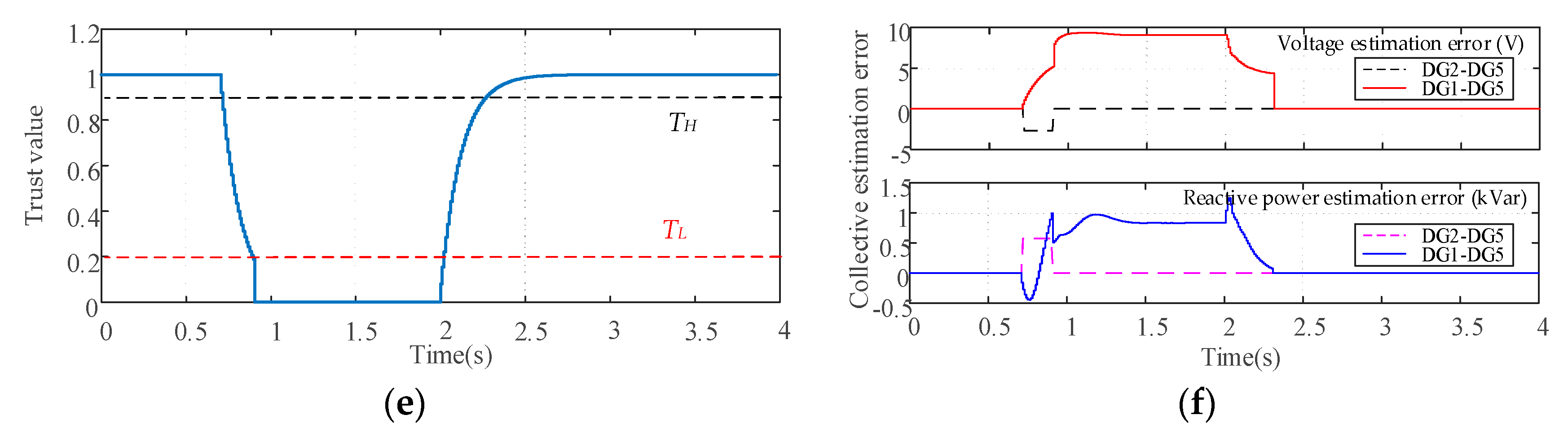
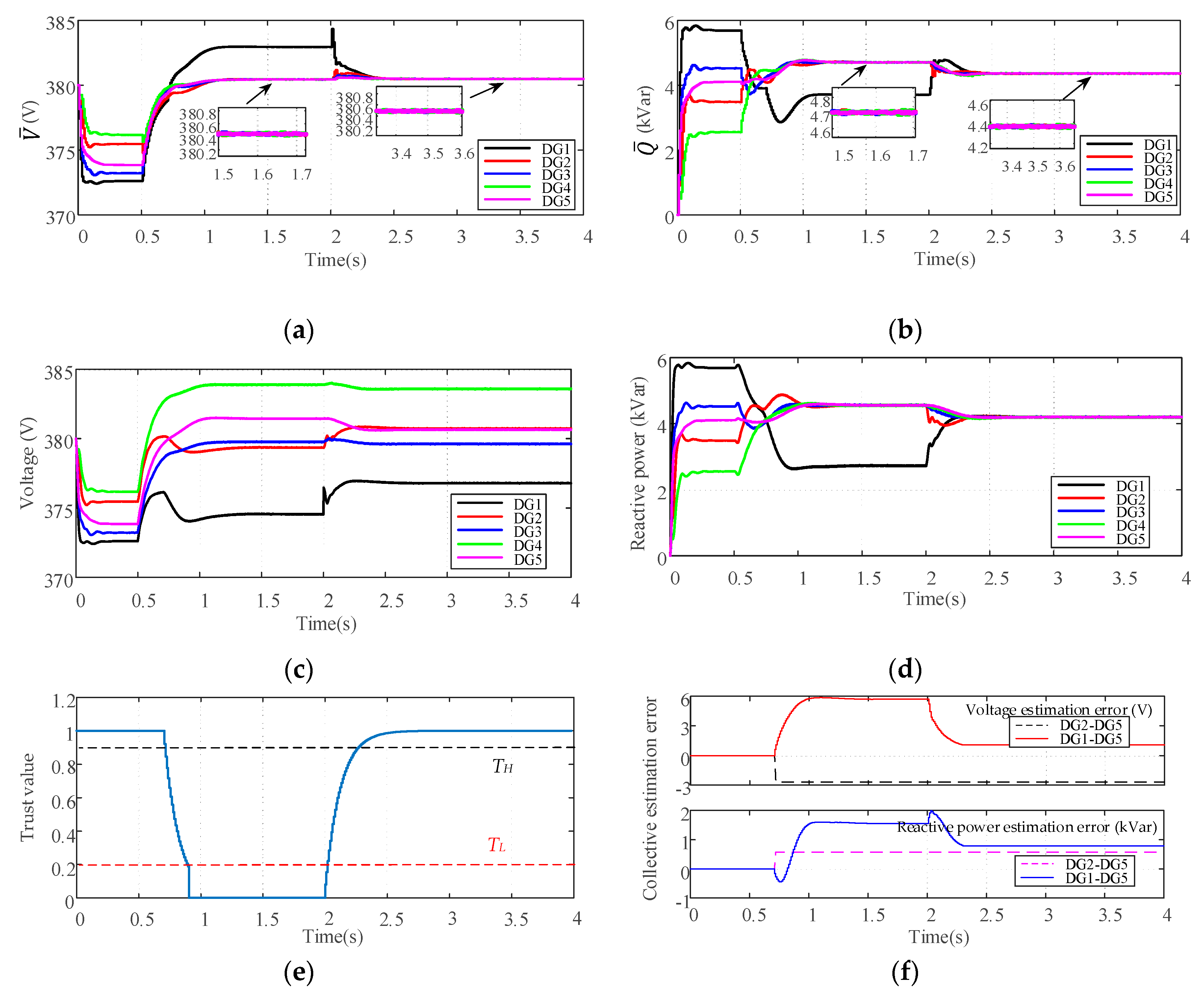
5.1. Transient Disturbance Scenario
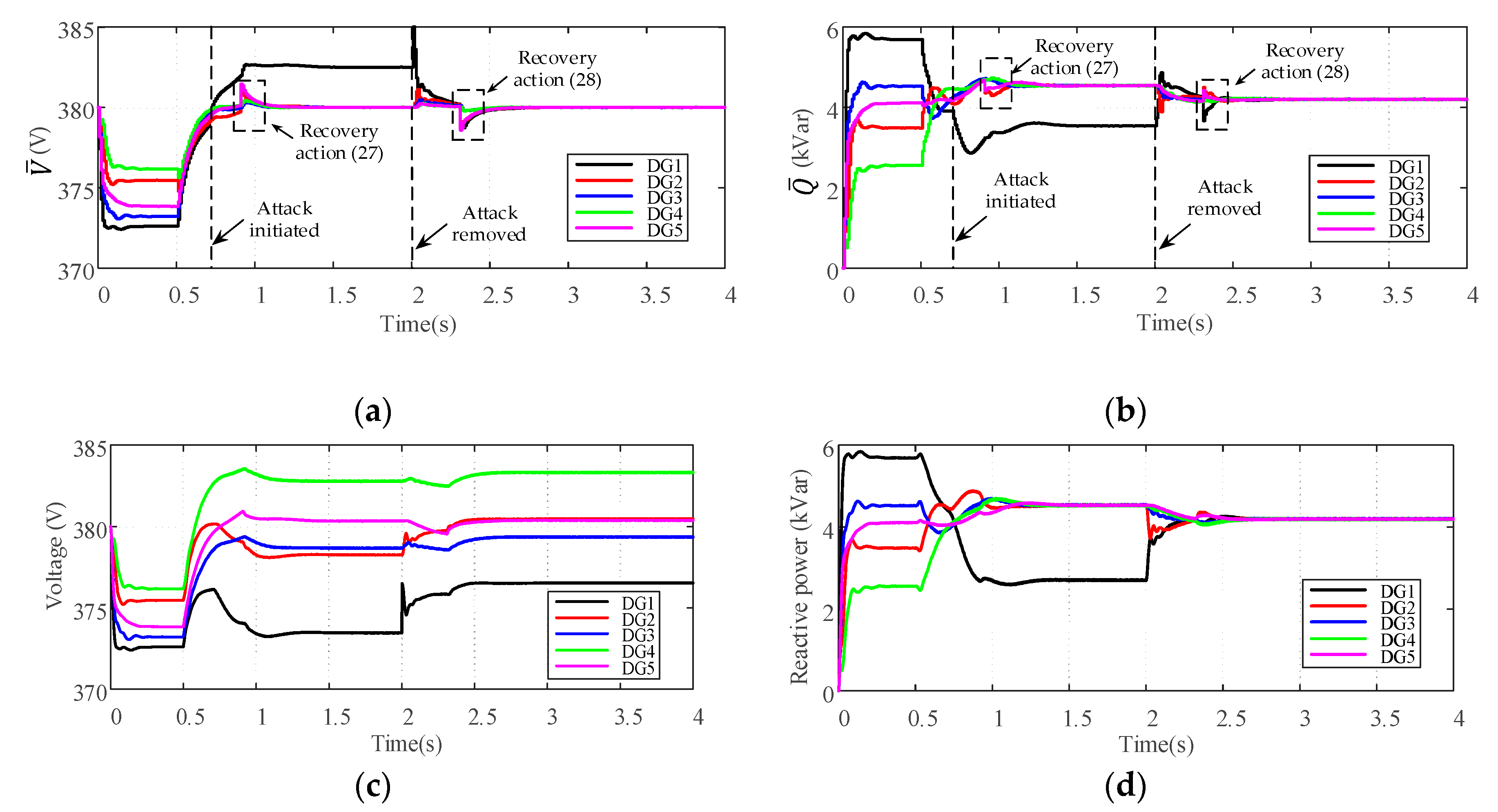
5.2. Continuous FDI Attack Scenario
5.3. Multiple Attakers and Colluding Attack Scenario
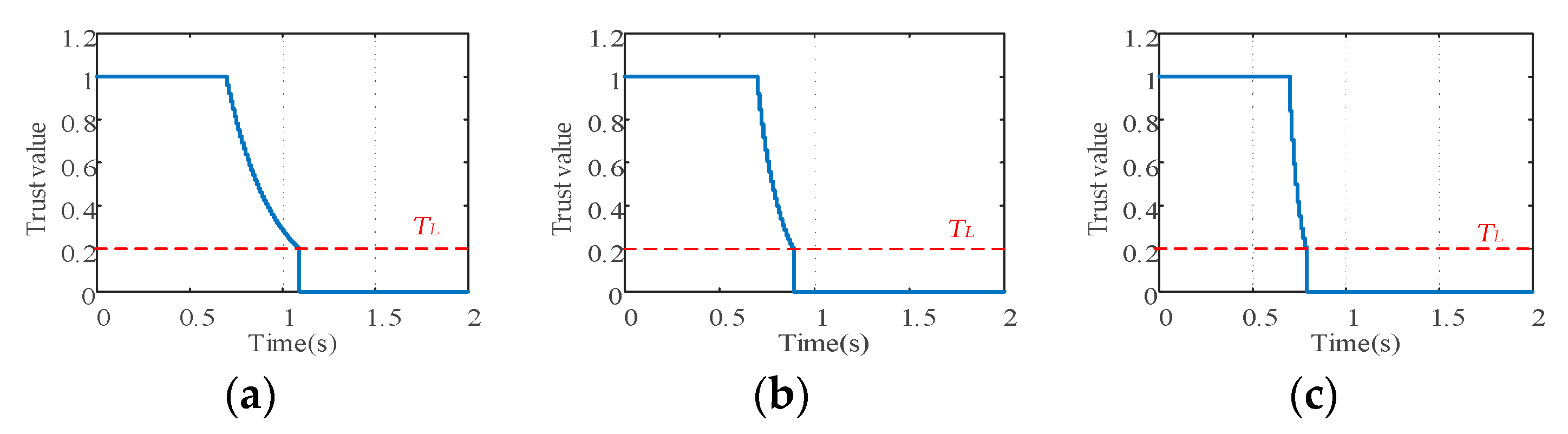
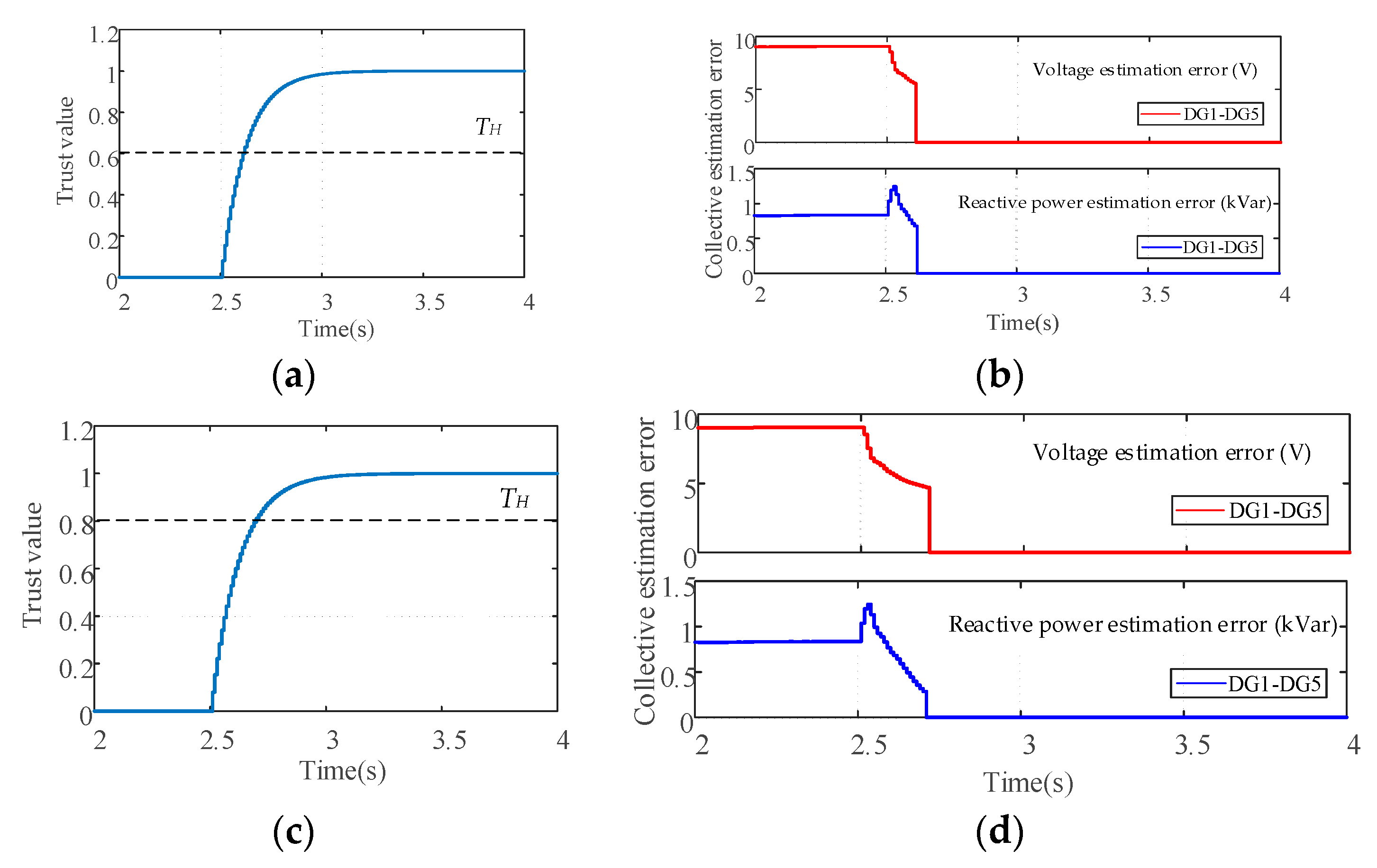
5.4. Impacts of Parameter Selection on the Performance of Resilient Control Scheme
5.5. Scalability Test of the Resilient Control Scheme
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DG2, DG4, DG10 | DG5, DG7, DG9 | ||||
|---|---|---|---|---|---|
| Line Impedance | |||||
| Secondary Control Parameters | |||||
| Trust Evaluation Parameters | |||||
References
- Kabalci, Y. A survey on smart metering and smart grid communication. Renew. Sust. Energ. Rev. 2016, 57, 302–318. [Google Scholar] [CrossRef]
- Han, Y.; Zhang, K.; Li, H.; Coelho, E.A.A.; Guerrero, J.M. Mas-based distributed coordinated control and optimization in microgrid and microgrid clusters: A comprehensive overview. IEEE Trans. Power Electron. 2018, 33, 6488–6508. [Google Scholar] [CrossRef]
- Schiffer, J.; Seel, T.; Raisch, J.; Sezi, T. Voltage stability and reactive power sharing in inverter-based microgrids with consensus-based distributed voltage control. IEEE Trans. Control Syst. Technol. 2016, 24, 96–109. [Google Scholar] [CrossRef]
- Carpintero-Rentería, M.; Santos-Martín, D.; Guerrero, J.M. Microgrids literature review through a layers structure. Energies 2019, 12, 4381. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; De Vicuna, L.G.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Tran, Q.T.T.; Luisa Di Silvestre, M.; Riva Sanseverino, E.; Zizzo, G.; Pham, T.N. Driven primary regulation for minimum power losses operation in islanded microgrids. Energies 2018, 11, 2890. [Google Scholar] [CrossRef]
- Isa, N.M.; Tan, C.W.; Yatim, A.H.M. A comprehensive review of cogeneration system in a microgrid: A perspective from architecture and operating system. Renew. Sust. Energ. Rev. 2018, 81, 2236–2263. [Google Scholar] [CrossRef]
- Sonam, S.; Bidyadhar, S.; Susmita, D. Distributed voltage and frequency synchronisation control scheme for islanded inverter-based microgrid. IET Smart Grid 2018, 1, 48–56. [Google Scholar]
- Chen, F.; Chen, M.; Li, Q.; Meng, K.; Guerrero, J.M.; Abbott, D. Multiagent-based reactive power sharing and control model for islanded microgrids. IEEE Trans. Sustain. Energy 2016, 7, 1232–1244. [Google Scholar] [CrossRef]
- Simpson-Porco, J.W.; Shafiee, Q.; Dörfler, F.; Vasquez, J.C.; Guerrero, J.M.; Bullo, F. Secondary frequency and voltage control of islanded microgrids via distributed averaging. IEEE Trans. Ind. Electron. 2015, 62, 7025–7038. [Google Scholar] [CrossRef]
- Abhinav, S.; Schizas, I.D.; Lewis, F.L.; Davoudi, A. Distributed noise-resilient networked synchrony of active distribution systems. IEEE Trans. Smart Grid 2018, 9, 836–884. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hamdan, M.M.; Barudi, U.A. Modeling and control of cyber-physical systems subject to cyber attacks: A survey of recent advances and challenges. Neurocomputing 2019, 338, 101–105. [Google Scholar] [CrossRef]
- Chlela, M.; Joos, G.; Kassouf, M. Impact of cyber-attacks on islanded microgrid operation. In Proceedings of the Workshop on Communications, Computation and Control for Resilient Smart Energy Systems RSES ’16, New York, NY, USA, 21–24 June 2016. [Google Scholar]
- Deng, R.; Zhuang, P.; Liang, H. CCPA: Coordinated cyber-physical attacks and countermeasures in smart grid. IEEE Trans. Smart Grid 2017, 8, 2420–2430. [Google Scholar] [CrossRef]
- Zhao, C.; He, J.; Cheng, P.; Chen, J. Analysis of consensus-based distributed economic dispatch under stealthy attacks. IEEE Trans. Ind. Electron. 2017, 64, 51107–55117. [Google Scholar] [CrossRef]
- Rahman, M.A.; Mohsenian-Rad, H. False data injection attacks with incomplete information against smart power grids. In Proceedings of the 2012 IEEE Global Communications Conference (GLOBECOM), Anaheim, CA, USA, 3–7 December 2012. [Google Scholar]
- Liang, G.; Zhao, J.; Luo, F.; Weller, S.R.; Dong, Z.Y. A review of false data injection attacks against modern power systems. IEEE Trans. Smart Grid 2017, 8, 1630–1638. [Google Scholar] [CrossRef]
- Qi, J.; Taha, A.F.; Wang, J. Comparing kalman filters and observers for power system dynamic state estimation with model uncertainty and malicious cyber attacks. IEEE Access 2018, 6, 77155–77168. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, G.; La Scala, M.; Dong, Z.Y.; Chen, C.; Wang, J. Short-term state forecasting-aided method for detection of smart grid general false data injection attacks. IEEE Trans. Smart Grid 2017, 8, 1580–1590. [Google Scholar] [CrossRef]
- Wang, H.; Ruan, J.; Ma, Z.; Zhou, B.; Fu, X. Deep learning aided interval state prediction for improving cyber security in energy internet. Energy 2019, 174, 1292–1304. [Google Scholar] [CrossRef]
- James Ranjith, K.R.; Kundur, D.; Sikdar, B. Transient model-based detection scheme for false data injection attacks in microgrids. In Proceedings of the 2019 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Beijing, China, 21–23 October 2019. [Google Scholar]
- Zhang, H.; Meng, W.; Qi, J.; Wang, X.; Zheng, W.X. Distributed load sharing under false data injection attack in an inverter-based microgrid. IEEE Trans. Ind. Electron. 2019, 66, 1543–1551. [Google Scholar] [CrossRef]
- Beg, O.A.; Johnson, T.T.; Davoudi, A. Detection of false-data injection attacks in cyber-physical DC microgrids. IEEE Trans. Ind. Electron. 2017, 13, 2693–2703. [Google Scholar] [CrossRef]
- Beg, O.A.; Nguyen, L.V.; Johnson, T.T.; Davoudi, A. Signal temporal logic-based attack detection in DC microgrids. IEEE Trans. Smart Grid 2019, 10, 3585–3595. [Google Scholar] [CrossRef]
- Abhinav, S.; Modares, H.; Lewis, F.L.; Ferrese, F.; Davoudi, A. Synchrony in networked microgrids under attacks. IEEE Trans. Smart Grid 2018, 9, 6731–6741. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Y.; Lu, X.; Zheng, T.; Wang, J.; Mei, S. Resilient active power sharing in autonomous microgrids using pinning-consensus-based distributed control. IEEE Trans. Smart Grid 2019, 10, 6802–6811. [Google Scholar] [CrossRef]
- Zeng, W.; Chow, M. Resilient distributed control in the presence of misbehaving agents in networked control systems. IEEE Trans. Cybern. 2014, 44, 2038–2049. [Google Scholar] [CrossRef] [PubMed]
- Ren, J.; Zhang, Y.; Ye, Q.; Yang, K.; Zhang, K.; Shen, X.S. Exploiting secure and energy efficient collaborative spectrum sensing for cognitive radio sensor networks. IEEE Trans. Wirel. Commun. 2016, 15, 6813–6827. [Google Scholar] [CrossRef]
- Singh, K.; Verma, A.K. FCTM: A novel fuzzy classification trust model for enhancing reliability in flying Ad hoc networks (FANETs). Ad Hoc Sens. Wirl. Netw. 2018, 40, 23–47. [Google Scholar]
- Zhu, M.; Martínez, S. Discrete-time dynamic average consensus. Automatica 2010, 46, 322–329. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J.C. Distributed secondary control for islanded microgrids—A novel approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- He, J.; Zhou, M.; Cheng, P.; Shi, L.; Chen, J. Consensus under bounded noise in discrete network systems: An algorithm with fast convergence and high accuracy. IEEE Trans. Cybern. 2016, 46, 2874–2884. [Google Scholar] [CrossRef]
- Zeng, W.; Chow, M. A reputation-based secure distributed control methodology in D-NCS. IEEE Trans. Ind. Electron. 2014, 61, 6294–6303. [Google Scholar] [CrossRef]
- Li, P.; Liu, Y.; Xin, H.; Jiang, X. A robust distributed economic dispatch strategy of virtual power plant under cyber-attacks. IEEE Trans. Ind. Inform. 2018, 14, 4343–4352. [Google Scholar] [CrossRef]
- Jones, G.; Vanderson, B.; Otto, L.; Edson, S.; Jean-Paul, B.; Fabrício, E. Trust and reputation models for multi-agent systems. ACM Comput. Surv. 2015, 48, 1–42. [Google Scholar]
- Hao, Y.; Cheng, Y.; Zhou, C.; Song, W. A distributed key management framework with cooperative message authentication in VANET. IEEE J. Sel. Areas Commun. 2011, 29, 616–629. [Google Scholar] [CrossRef]
- Zhang, Q.; Yu, T.; Ning, P. A framework for identifying compromised nodes in wireless sensor networks. ACM Trans. Inf. Syst. Secur. 2008, 11, 1–37. [Google Scholar] [CrossRef]


















| DG1 & DG2 (25 kW, 15 kVar) | DG3 & DG4 & DG5 (20 kW, 12 kVar) | ||||||
|---|---|---|---|---|---|---|---|
| Line 1 &Line 3 | Line 2&Line 4 | ||||||
| Load 1 | Load 2 | Load 3 | |||||
| 12kW + 10 kVar | 15 kW + 5 kVar | 6 kW + 6 kVar | |||||
| Secondary Control Parameters | |||||||
| Trust Evaluation Parameters | |||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, L.; Xu, G. Distributed Resilient Voltage and Reactive Power Control for Islanded Microgrids under False Data Injection Attacks. Energies 2020, 13, 3828. https://doi.org/10.3390/en13153828
Ma L, Xu G. Distributed Resilient Voltage and Reactive Power Control for Islanded Microgrids under False Data Injection Attacks. Energies. 2020; 13(15):3828. https://doi.org/10.3390/en13153828
Chicago/Turabian StyleMa, Liang, and Gang Xu. 2020. "Distributed Resilient Voltage and Reactive Power Control for Islanded Microgrids under False Data Injection Attacks" Energies 13, no. 15: 3828. https://doi.org/10.3390/en13153828
APA StyleMa, L., & Xu, G. (2020). Distributed Resilient Voltage and Reactive Power Control for Islanded Microgrids under False Data Injection Attacks. Energies, 13(15), 3828. https://doi.org/10.3390/en13153828