Influence of Control and Structure Parameters on the Starting Performance of a 12/8 Pole Switched Reluctance Motor


Abstract
1. Introduction
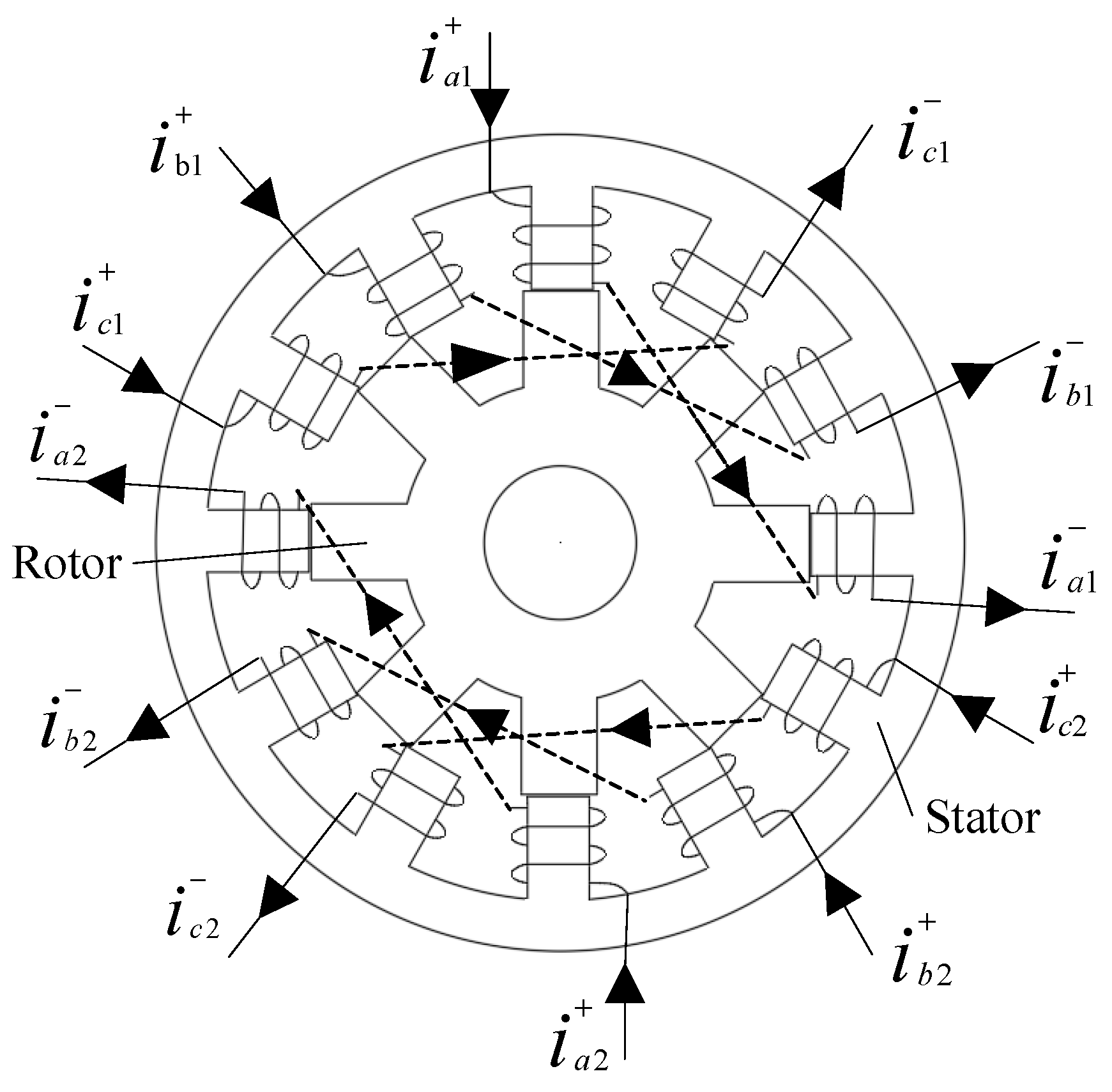
2. Establishment of SRM Field-Circuit Coupling Finite Element Model
3. Influence of Rotor Initial Position Angle on Starting Torque of SRM
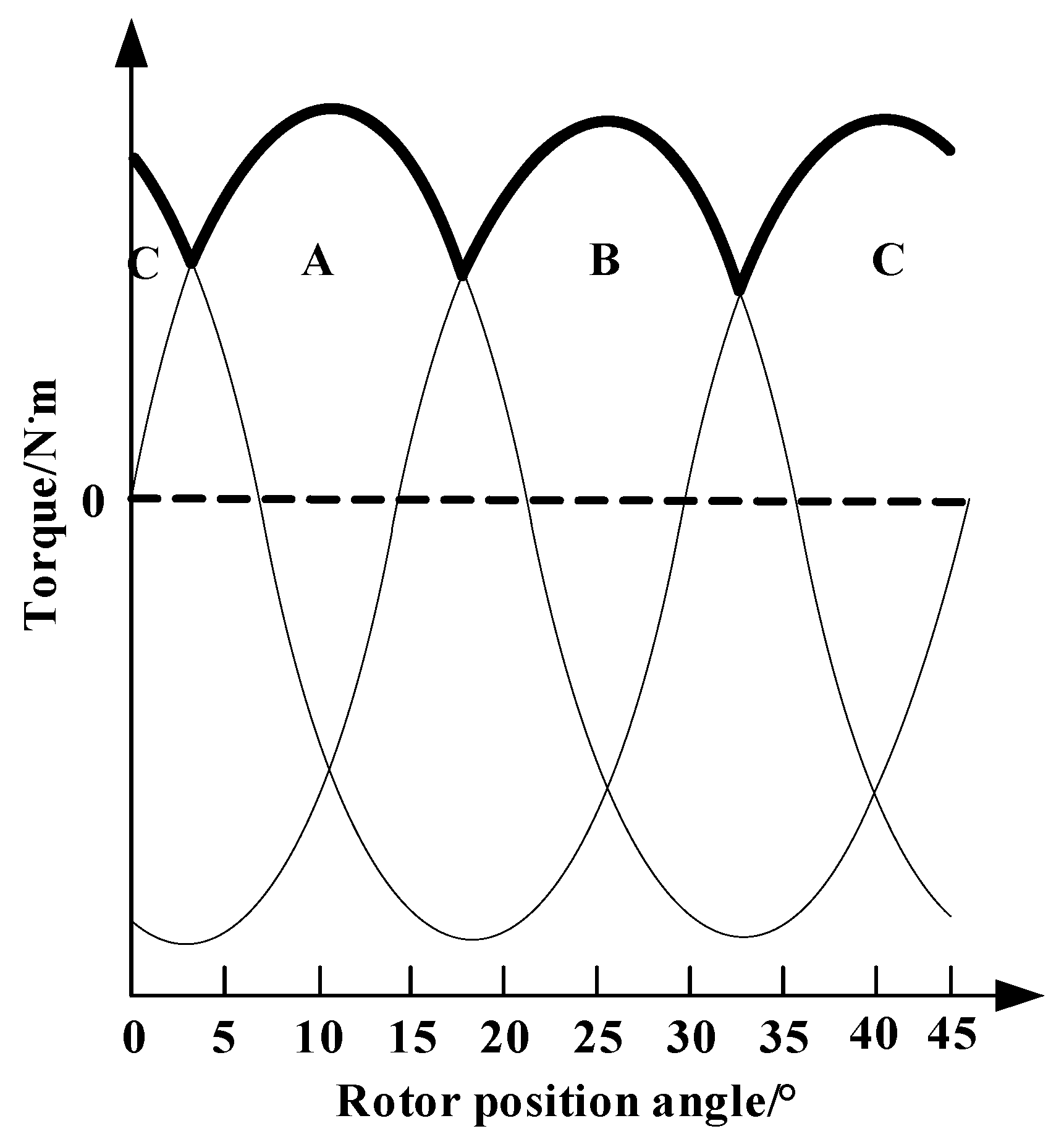
4. Influence of Starting Mode on Starting Torque of SRM
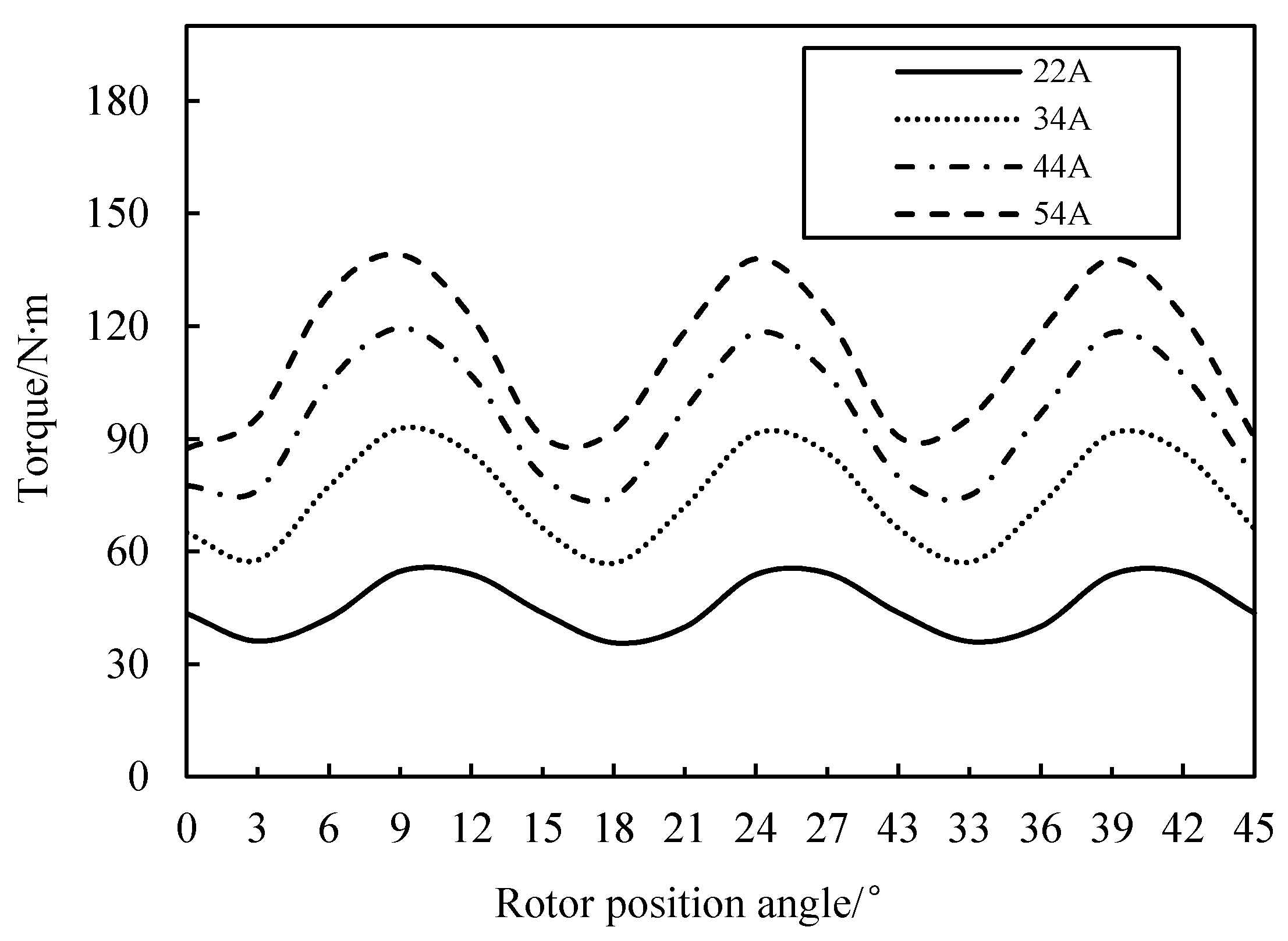
5. Influence of Starting Current on Starting Torque of SRM
6. Influence of Structure Parameters on Starting Torque of SRM
6.1. Influence of Stator and Rotor Pole arc Coefficient on Starting Torque of SRM
6.2. Influence of Air Gap Length on Starting Torque of SRM
7. Establishment of the Static Electromagnetic Field Model of SRM
8. Comparison of Measured Values and Calculation Results
9. Conclusions
- (1).
- The rotor initial position angle has an obvious effect on the starting torque of the SRM. The starting torques of the SRM are 45.32 N·m, 24.69 N·m, and 54.86 N·m when rotor initial position angle is 0°, 3.75°, and 12°, respectively. The maximum starting torques of SRM are basically the same when the starting mode of one-phase winding and the alternating starting mode of single- and two-phase winding are used, respectively.
- (2).
- Starting torque increases with the increase of starting current under the same rotor position. The average starting torques of SRM are 112.02 N·m, 95.073 N·m, 74.5 N·m, and 45.58 N·m, when the starting currents are 54 A, 44 A, 34 A, and 22 A, respectively. The average starting torque of SRM when the starting current is 34 A is 1.63 times that of SRM when the starting current is 22 A.
- (3).
- When the stator pole arc coefficient is constant, the starting torque ripple coefficient of the SRM decreases with the increase of the rotor pole arc coefficient. When the rotor pole arc coefficient is constant, the starting torque ripple coefficient of the SRM decreases with the increase of stator pole arc coefficient. However, the average starting torque of the SRM increases with the increase of the stator pole arc coefficient. The air gap length between the inner diameter of stator core and the top of the rotor salient pole tooth has an obvious effect on the starting torque of the SRM. The starting torque and the torque ripple coefficient of the SRM decreases with the increase of air gap length.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| SRM | Switched reluctance motor |
| RMS | Root mean square |
| Torque (N·m) | |
| Phase number | |
| Rotor position angle () | |
| Phase current (A) | |
| Phase inductance (H) | |
| A-phase current (A) | |
| B-phase current (A) | |
| C-phase current (A) |
References
- Takeno, M.; Chiba, A.; Hoshi, N.; Ogasawara, S.; Takemoto, M.; Rahman, M.A. Test result and torque improvement of the 50-kW switched reluctance motor designed for hybrid electric vehicles. IEEE Trans. Ind. Appl. 2012, 48, 1327–1334. [Google Scholar] [CrossRef]
- Arbab, N.; Wang, W.; Lin, C.; Hearron, J.; Fahimi, B. Thermal modeling and analysis of a double-stator switched reluctance motor. IEEE Trans. Energy Convers. 2015, 30, 1209–1217. [Google Scholar] [CrossRef]
- Ralllabandi, V.; Wu, J.; Zhou, P.; Dorrel, D.G.; Ionel, D.M. Optimal design of a switched reluctance motor with magnetically disconnected rotor models using a design of experiments differential evolution FEA-based method. IEEE Trans. Magn. 2018, 54, 8205705. [Google Scholar] [CrossRef]
- Fernández, F.J.M.; Potgieter, J.H.J.; Fraser, A.G.; McCulloch, M.D. Experimental validation of a thermal model for high-speed switched reluctance machines for traction applications. IEEE Trans. Ind. Appl. 2018, 54, 3235–3244. [Google Scholar] [CrossRef]
- Oliveira, A.L.; Pelizari, A.; Filho, A.J.S. Finite element analysis simulation of switched reluctance motor drive. IEEE Lat. Am. Trans. 2018, 16, 1928–1933. [Google Scholar] [CrossRef]
- Santos, F.L.M.d.; Anthonisc, J.; Naclerio, F.; Gyselinck, J.J.C.; der Auweraer, H.V.; Goes, L.C.S. Multiphysics NVH modeling: Simulation of a switched reluctance motor for an electric vehicle. IEEE Trans. Ind. Electron. 2014, 61, 469–476. [Google Scholar] [CrossRef]
- Faiz, J.; Ganji, B.; Carstensen, C.E.; Kasper, K.A.; Doncker, R.W.D. Temperature rise analysis of switched reluctance motors due to electromagnetic losses. IEEE Trans. Magn. 2009, 45, 2927–2934. [Google Scholar] [CrossRef]
- Cao, G.; Li, L.; Huang, S.; Li, L.; Qian, Q.; Duan, J. Nonlinear modeling of electromagnetic forces for the planar-switched reluctance motor. IEEE Trans. Magn. 2015, 51, 8206605. [Google Scholar] [CrossRef]
- Pan, J.F.; Zou, Y.; Cao, G.; Cheung, N.C.; Zhang, B. High precision dual-loop position control of an asymmetric bilateral linear hybrid switched reluctance motor. IEEE Trans. Magn. 2015, 51, 1–5. [Google Scholar] [CrossRef]
- Ling, X.; Li, B.; Gong, L.; Huang, Y.; Liu, C. Simulation of switched reluctance motor drive system based on multi-physics modeling method. IEEE Access 2017, 5, 26184–26189. [Google Scholar] [CrossRef]
- Amoros, J.G.; Andrada, P.; Blanque, B.; Genesca, M.M. Influence of design parameters in the Optimization of linear switched reluctance motor under thermal constraints. IEEE Trans. Ind. Electron. 2018, 65, 1875–1883. [Google Scholar] [CrossRef]
- Liu, A.; Lou, J.; Yu, S. Influence of exciting field on electromagnetic torque of novel switched reluctance motor. IEEE Trans. Magn. 2019, 55, 8202807. [Google Scholar] [CrossRef]
- Toda, H.; Senda, K.; Morimoto, S.; Hiratani, T. Influence on various Non-oriented electrical steels on motor efficiency and iron loss in switched reluctance motor. IEEE Trans. Magn. 2013, 49, 3850–3853. [Google Scholar] [CrossRef]
- Afjei, E.; Siadatan, A.; Torkaman, H. Magnetic modeling, prototyping, and comparative study of a quintuple-set switched reluctance motor. IEEE Trans. Magn. 2015, 51, 8203407. [Google Scholar] [CrossRef]
- Sanches, E.S.; Santisteban, J.A. Mutual inductance effect on the torque of an axial magnetic flux switched reluctance motor. IEEE Lat. Am. Trans. 2015, 13, 2239–2244. [Google Scholar] [CrossRef]
- Han, J.; Ge, B.; Li, W. Influence of magnetic permeability of the press plate on the loss and temperature of the end part in the end region of a turbogenerator. IEEE Trans. Ind. Electron. 2019, 66, 162–171. [Google Scholar] [CrossRef]
- Cebolla, F.J.P.; Iturbe, A.M.; del Brio, B.M.; Bernal, C.; Neuz, A.B. Nonlinear lumped-circuit model for switched reluctance motors exhibiting core losses. IEEE Trans. Ind. Electron. 2016, 63, 3433–3445. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and challenges of switched reluctance motor drives for electric propulsion: A comparative study. IEEE Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, H.; Gu, J. Power loss analysis on switched reluctance motor converter by using electrothermal model. IET Power Electron. 2015, 8, 130–141. [Google Scholar] [CrossRef]
- Madhavan, R.; Fernandes, B.G. Performance improvement in the axial flux-segmented rotor-switched reluctance motor. IEEE Trans. Power Convers. 2014, 29, 641–651. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Rated power (kW) | 5.5 |
| Rated speed (r/min) | 1500 |
| Stator outer diameter (mm) | 210.7 |
| Stator inner diameter (mm) | 116 |
| Rotor outer diameter (mm) | 115.2 |
| Rotor inner diameter (mm) | 57.6 |
| Air gap (mm) | 0.4 |
| Core length (mm) | 130.8 |
| Coil turns per pole | 131 |
| Material of stator and rotor core | DW310 |
| Material of coil | Copper |
| Case I | Case II | Case III | Case IV | Case V | Case VI | Case VII | |
|---|---|---|---|---|---|---|---|
| Stator pole arc coefficient | 0.45 | 0.45 | 0.45 | 0.55 | 0.55 | 0.55 | 0.49 |
| Rotor pole arc coefficient | 0.35 | 0.4 | 0.45 | 0.35 | 0.4 | 0.45 | 0.38 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, J.; Ge, B.; Zhang, K.; Wang, Y.; Wang, C. Influence of Control and Structure Parameters on the Starting Performance of a 12/8 Pole Switched Reluctance Motor. Energies 2020, 13, 3744. https://doi.org/10.3390/en13143744
Han J, Ge B, Zhang K, Wang Y, Wang C. Influence of Control and Structure Parameters on the Starting Performance of a 12/8 Pole Switched Reluctance Motor. Energies. 2020; 13(14):3744. https://doi.org/10.3390/en13143744
Chicago/Turabian StyleHan, Jichao, Baojun Ge, Kai Zhang, Yang Wang, and Chao Wang. 2020. "Influence of Control and Structure Parameters on the Starting Performance of a 12/8 Pole Switched Reluctance Motor" Energies 13, no. 14: 3744. https://doi.org/10.3390/en13143744
APA StyleHan, J., Ge, B., Zhang, K., Wang, Y., & Wang, C. (2020). Influence of Control and Structure Parameters on the Starting Performance of a 12/8 Pole Switched Reluctance Motor. Energies, 13(14), 3744. https://doi.org/10.3390/en13143744