Output Control of Three-Axis PMSG Wind Turbine Considering Torsional Vibration Using H Infinity Control

 ,
, 
Abstract
:1. Introduction
2. Wind Turbine System
2.1. Wind Turbine Model
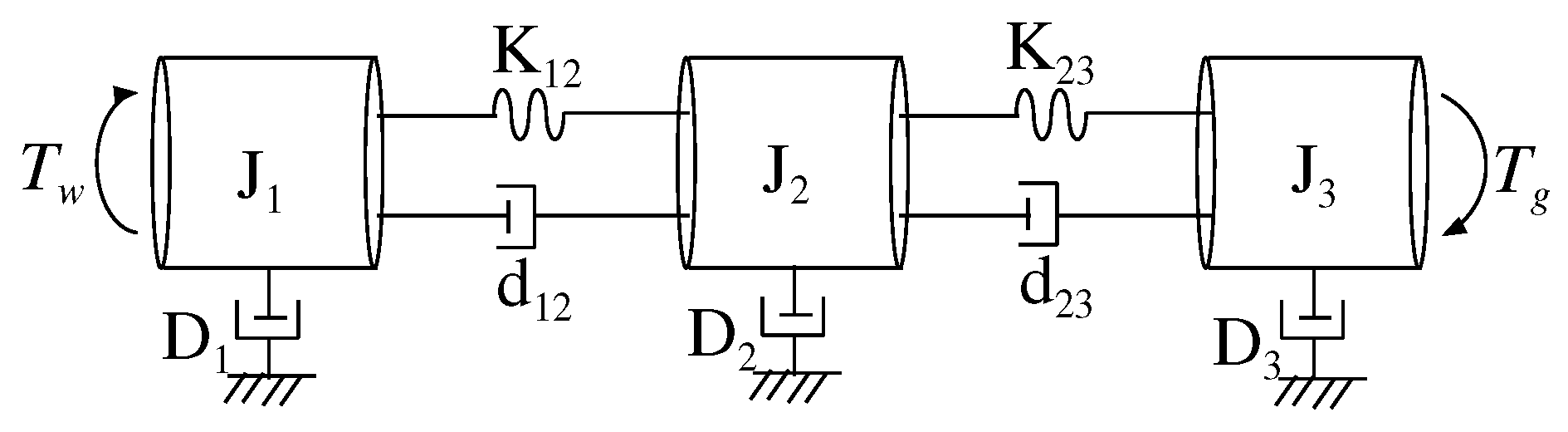
2.2. Three Inertial System Axis Model
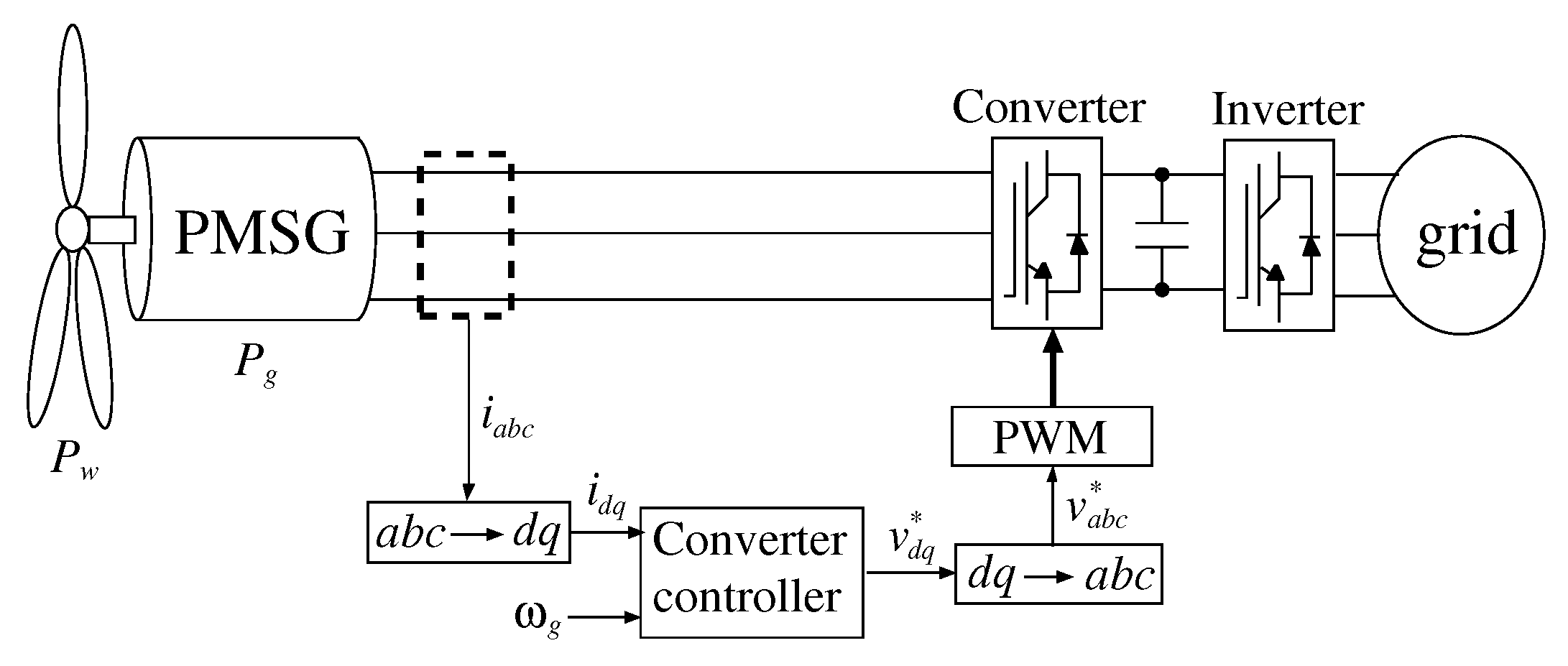
2.3. PMSG
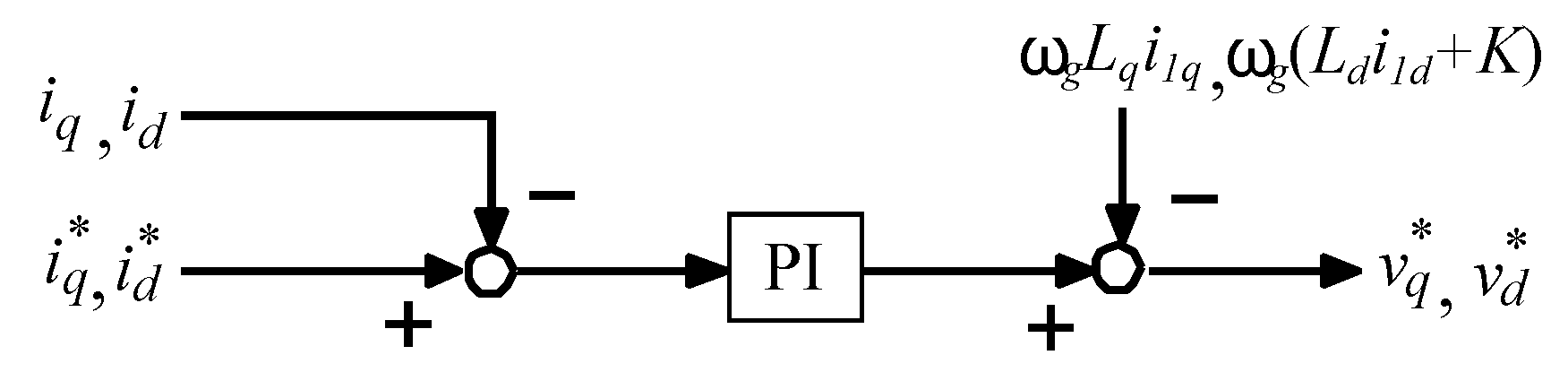
2.4. Converter of Generator Side
3. Shaft Torsional Control System Using Observer
3.1. Observer
3.2. Torsional Vibration Suppression Control
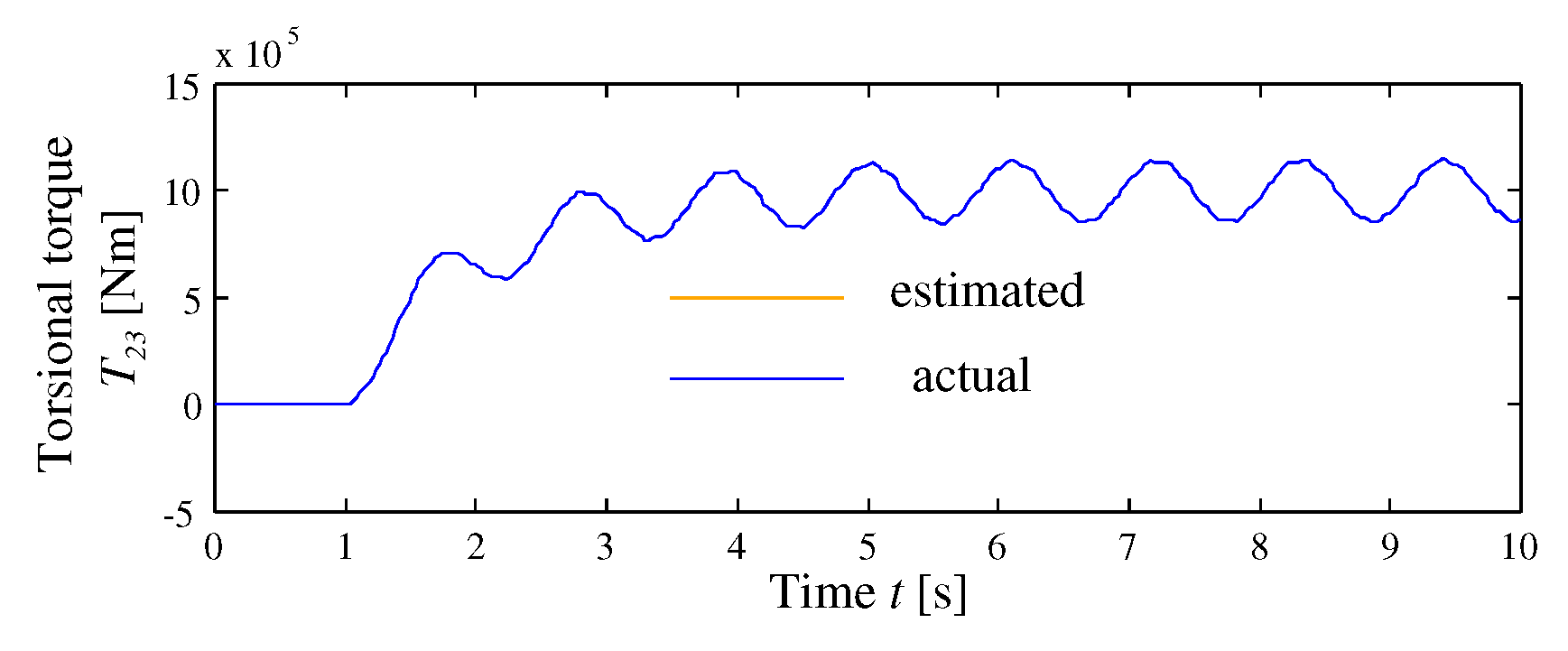
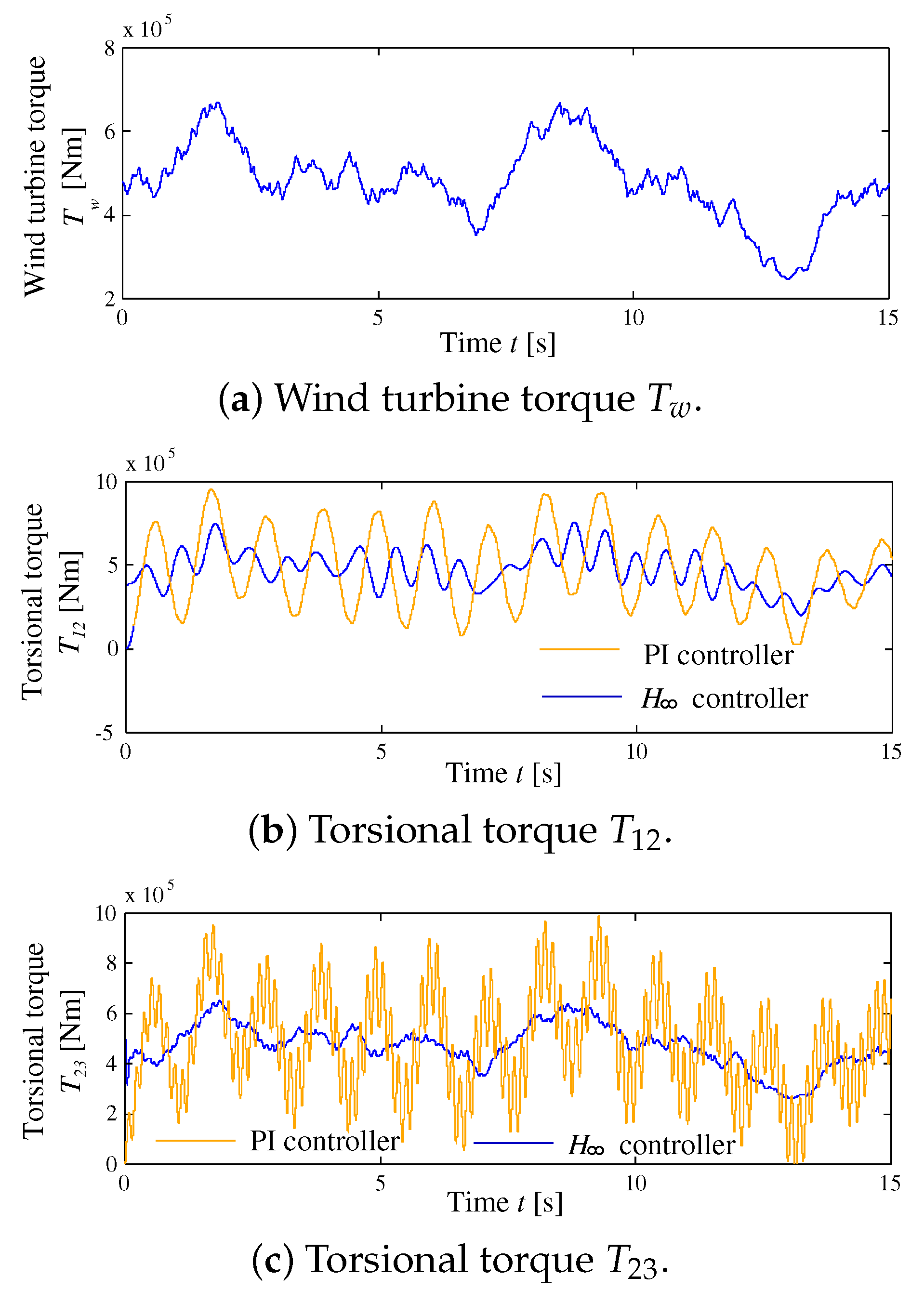
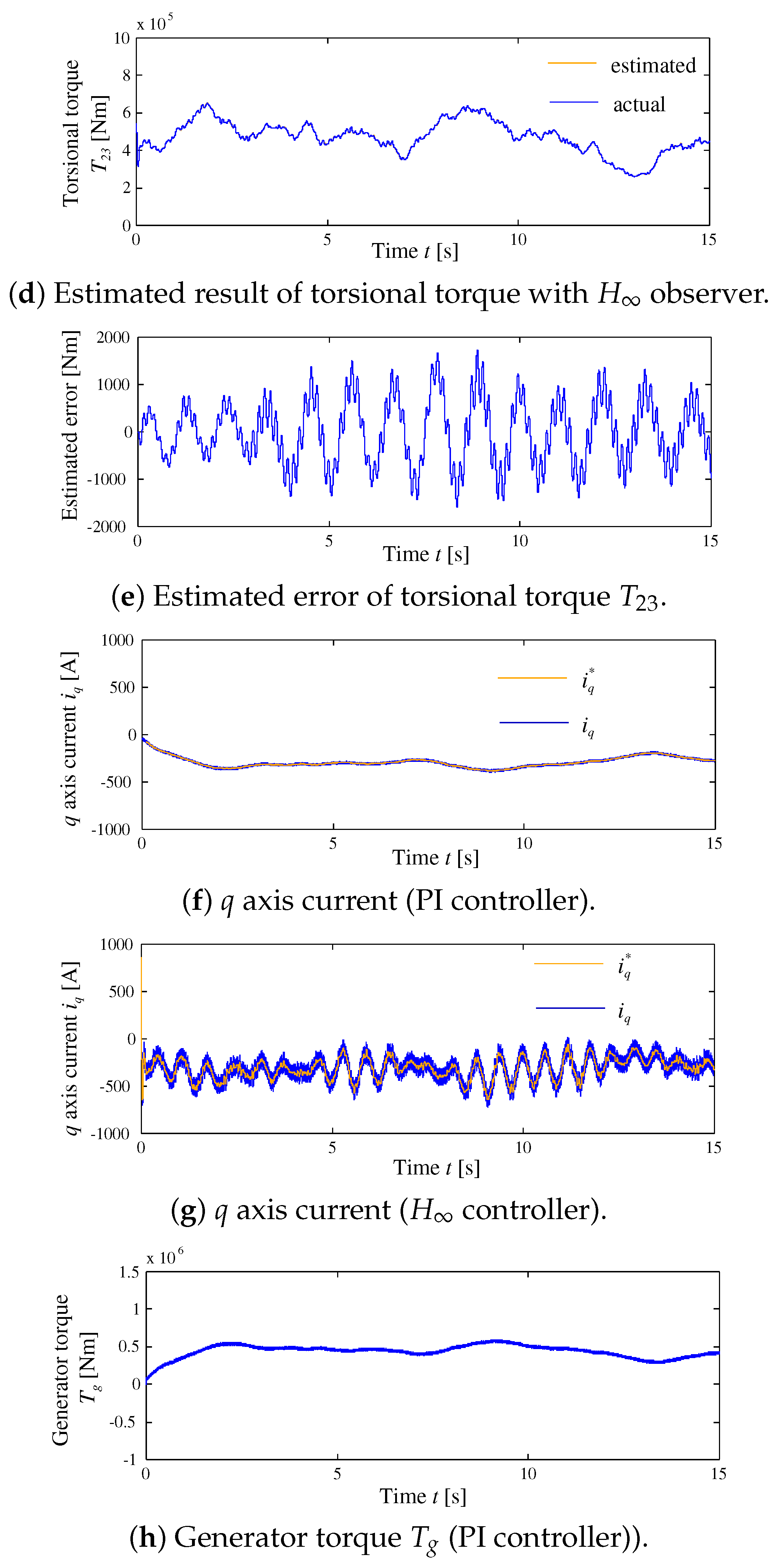
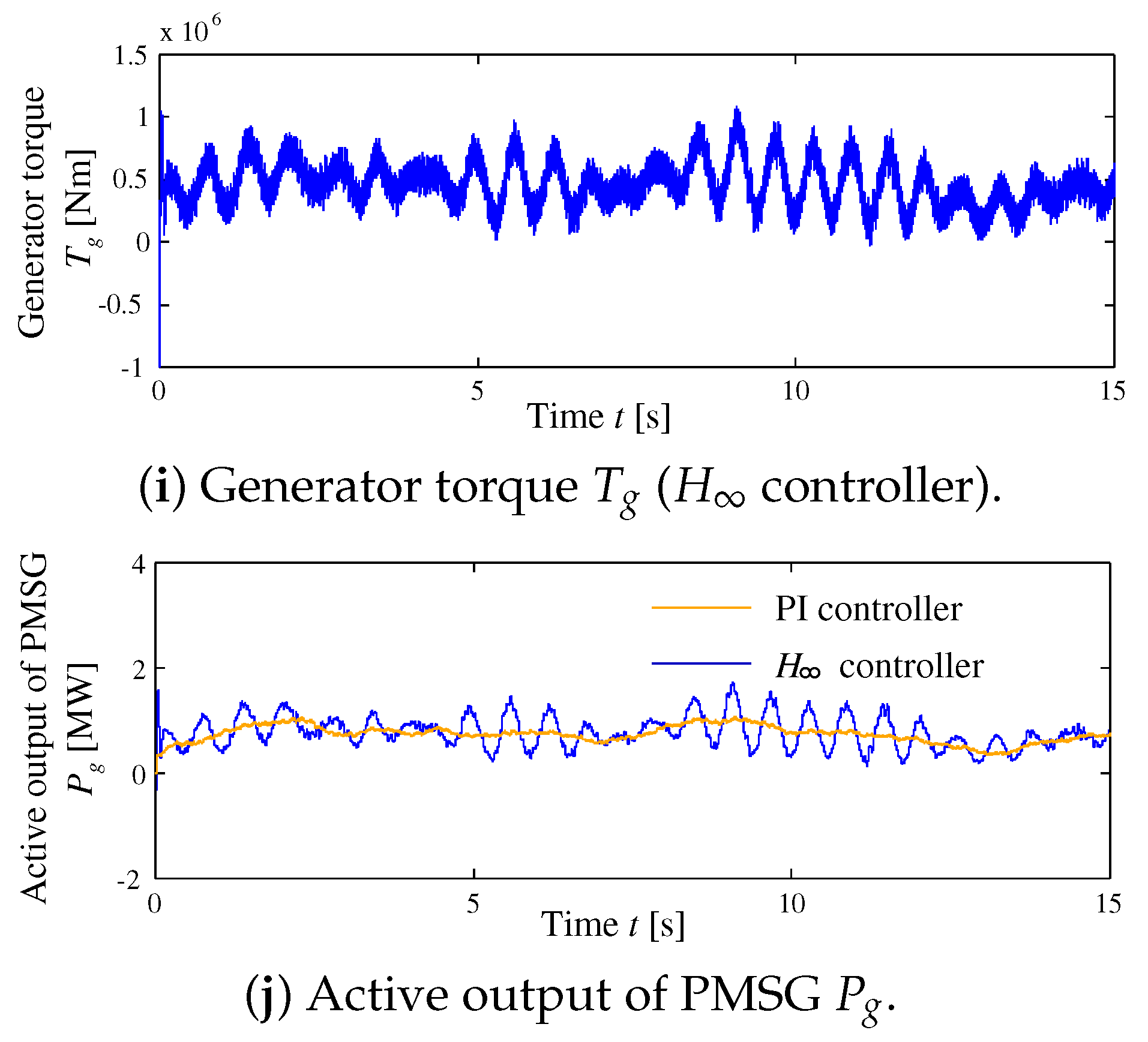
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kanellos, F.; Hatziargyriou, N. Control of Variable Speed Wind Turbines in Islanded Mode of Operation. IEEE Trans. Energy Convers. 2008, 23, 535–543. [Google Scholar] [CrossRef]
- Worku, M.Y.; Abido, M.A.; Iravani, R. PMSG based wind system for real-time maximum power generation and low voltage ride through. J. Renew. Sustain. Energy 2017, 9, 013304. [Google Scholar] [CrossRef]
- Yang, S.Y.; Wu, Y.K.; Lin, H.J. New application of predictive direct torque control in permanent magnet synchronous generator-based wind turbine. J. Renew. Sustain. Energy 2015, 7, 023108. [Google Scholar] [CrossRef]
- Tian, C.; Li, C.; Zhang, G.; Wang, M.; Wang, R. Switched model based control of dual-PWM converters in the direct-drive permanent magnet synchronous wind turbine system. J. Renew. Sustain. Energy 2018, 10, 053312. [Google Scholar] [CrossRef]
- Palmer, M.D.; Uehara, T.; Shigenobu, R.; Matayoshi, H.; Senjyu, T.; Datta, M. Suppression of power system voltage and frequency fluctuations by decentralized controllable loads. J. Renew. Sustain. Energy 2016, 8, 045905. [Google Scholar] [CrossRef]
- Sourkounis, C. Active dynamic damping of torsional vibrations by H Control. In Proceedings of the 2010 12th International Conference on Optimization of Electrical and Electronic Equipment, Basov, Romania, 20–22 May 2010; pp. 716–723. [Google Scholar]
- Morinaga, S.; Senjyu, T.; Funabashi, T. Torsional vibration suppression of the PMSG-based wind turbine generator using H∞ observer. In Proceedings of the 2013 1st International Future Energy Electronics Conference (IFEEC), Tainan, Taiwan, 3–6 November 2013; pp. 880–884. [Google Scholar]
- Chen, J.; Chen, J.; Gong, C. On Optimizing the Aerodynamic Load Acting on the Turbine Shaft of PMSG-Based Direct-Drive Wind Energy Conversion System. IEEE Trans. Ind. Electron. 2014, 61, 4022–4031. [Google Scholar] [CrossRef]
- Senjyu, T.; Nakasone, N.; Yona, A.; Yousuf, S.A.; Funabashi, T.; Sekine, H. Operation strategies for stability of gearless wind power generation systems. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008; pp. 1–7. [Google Scholar]
- Mughal, M.H.; Guojie, L. Review of Pitch Control for Variable Speed Wind Turbine. In Proceedings of the 2015 IEEE 12th Intl Conf on Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated Workshops (UIC-ATC-ScalCom), Beijing, China, 10–14 August 2015; pp. 738–744. [Google Scholar]
- Yao, X.; Guo, C.; Li, Y. LPV H-infinity controller design for variable-pitch variable-speed wind turbine. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 2222–2227. [Google Scholar]
- Uehara, A.; Pratap, A.; Goya, T.; Senjyu, T.; Yona, A.; Urasaki, N.; Funabashi, T. A Coordinated Control Method to Smooth Wind Power Fluctuations of a PMSG-Based WECS. IEEE Trans. Energy Convers. 2011, 26, 550–558. [Google Scholar] [CrossRef]
- Yin, M.; Li, G.; Zhou, M.; Zhao, C. Modeling of the Wind Turbine with a Permanent Magnet Synchronous Generator for Integration. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–6. [Google Scholar]
- Sun, T.; Chen, Z.; Blaabjerg, F. Voltage recovery of grid-connected wind turbines after a short-circuit fault. In Proceedings of the IECON’03, 29th Annual Conference of the IEEE Industrial Electronics Society (IEEE Cat. No.03CH37468), Roanoke, VA, USA, 2–6 November 2003; Volume 3, pp. 2723–2728. [Google Scholar]
- Thakur, R.; Jha, N. Impact of transients due to drive train in variable speed wind energy conversion system. In Proceedings of the 2012 IEEE Third International Conference on Sustainable Energy Technologies, Kathmandu, Nepal, 24–27 September 2012; pp. 402–408. [Google Scholar]
- Li, H.; Zhao, B.; Yang, C.; Chen, H.; Chen, Z. Analysis and estimation of transient stability for a grid-connected wind turbine with induction generator. Renew. Energy 2011, 36, 1469–1476. [Google Scholar] [CrossRef]
- Geng, H.; Xu, D.; Wu, B.; Yang, G. Active Damping for PMSG-Based WECS With DC-Link Current Estimation. IEEE Trans. Ind. Electron. 2011, 58, 1110–1119. [Google Scholar] [CrossRef]
- Matsuse, K. Motor Control Engineering -Basic of Variable-Speed Drive-; Corona Publishing Co., Ltd.: Gloucester, UK, 2007. [Google Scholar]
- Howlader, A.M.; Urasaki, N.; Yona, A.; Senjyu, T.; Saber, A.Y. Design and Implement a Digital H∞ Robust Controller for a MW-Class PMSG-Based Grid-Interactive Wind Energy Conversion System. Energies 2013, 6, 2084–2109. [Google Scholar] [CrossRef] [Green Version]
- Sakamoto, R.; Senjyu, T.; Kaneko, T.; Urasaki, N.; Takagi, T.; Sugimoto, S.; Sekine, H. Output Power Leveling of Wind Turbine Generator by Pitch Angle Control Using H/sub/spl infin//Control. In Proceedings of the 2006 IEEE PES Power Systems Conference and Exposition, Atlanta, GA, USA, 29 October–1 November 2006; pp. 2044–2049. [Google Scholar]
- Omine, E.; Goya, T.; Akie, U.; Senjyu, T.; Yona, A.; Urasaki, N.; Funabashi, T. Torsional torque suppression of decentralized generators using H∞ observer. Renew. Energy 2010, 35, 1908–1913. [Google Scholar] [CrossRef]
- Licari, J.; Ugalde-Loo, C.E.; Ekanayake, J.B.; Jenkins, N. Damping of Torsional Vibrations in a Variable-Speed Wind Turbine. IEEE Trans. Energy Convers. 2013, 28, 172–180. [Google Scholar] [CrossRef]
- Mseddi, A.; Ballois, S.L.; Aloui, H.; Vido, L. Robust control of a wind conversion system based on a hybrid excitation synchronous generator: A comparison between H∞ and CRONE controllers. Math. Comput. Simul. 2019, 158, 453–476. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| rated output | 2 MW |
|---|---|
| resistance R | 50 |
| d axis inductance | 5.0 mH |
| q axis inductance | 3.75 mH |
| number of pole pairs p | 11 |
| field flux K | 136.25 V · s/rad |
| Generator inertia | kg · m |
| blade radius R | 39 m |
| air density | 1.205 kg/m |
| rated wind speed | 12 m/s |
| Gear ratio | 1 |
| Wind turbine inertia | kg · m |
| Gear inertia | kg · m |
| Shaft stiffness | N · m/rad |
| Shaft stiffness | 90.65 N · m/rad |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takahashi, K.; Jargalsaikhan, N.; Rangarajan, S.; Hemeida, A.M.; Takahashi, H.; Senjyu, T. Output Control of Three-Axis PMSG Wind Turbine Considering Torsional Vibration Using H Infinity Control. Energies 2020, 13, 3474. https://doi.org/10.3390/en13133474
Takahashi K, Jargalsaikhan N, Rangarajan S, Hemeida AM, Takahashi H, Senjyu T. Output Control of Three-Axis PMSG Wind Turbine Considering Torsional Vibration Using H Infinity Control. Energies. 2020; 13(13):3474. https://doi.org/10.3390/en13133474
Chicago/Turabian StyleTakahashi, Kosuke, Nyam Jargalsaikhan, Shriram Rangarajan, Ashraf Mohamed Hemeida, Hiroshi Takahashi, and Tomonobu Senjyu. 2020. "Output Control of Three-Axis PMSG Wind Turbine Considering Torsional Vibration Using H Infinity Control" Energies 13, no. 13: 3474. https://doi.org/10.3390/en13133474