Switched Reluctance Generator for Low Voltage DC Microgrid Operation: Experimental Validation



Abstract
:1. Introduction
- at first from the design, the electrical machine can be optimized, for example, to minimize the Joule or/and iron losses: the selection of ferromagnetic material, length of the core, height of the teeth, and section of the conductors;
- the power converter can also be designed with a specific structure (interleaved or multilevel converters) or with specific power switches (silicon carbide, for example); and,
- a control structure tuned to operate the drive at the maximum efficiency, whatever the operating point.
2. Switched Reluctance Generator: Analysis of Open-Loop Operation
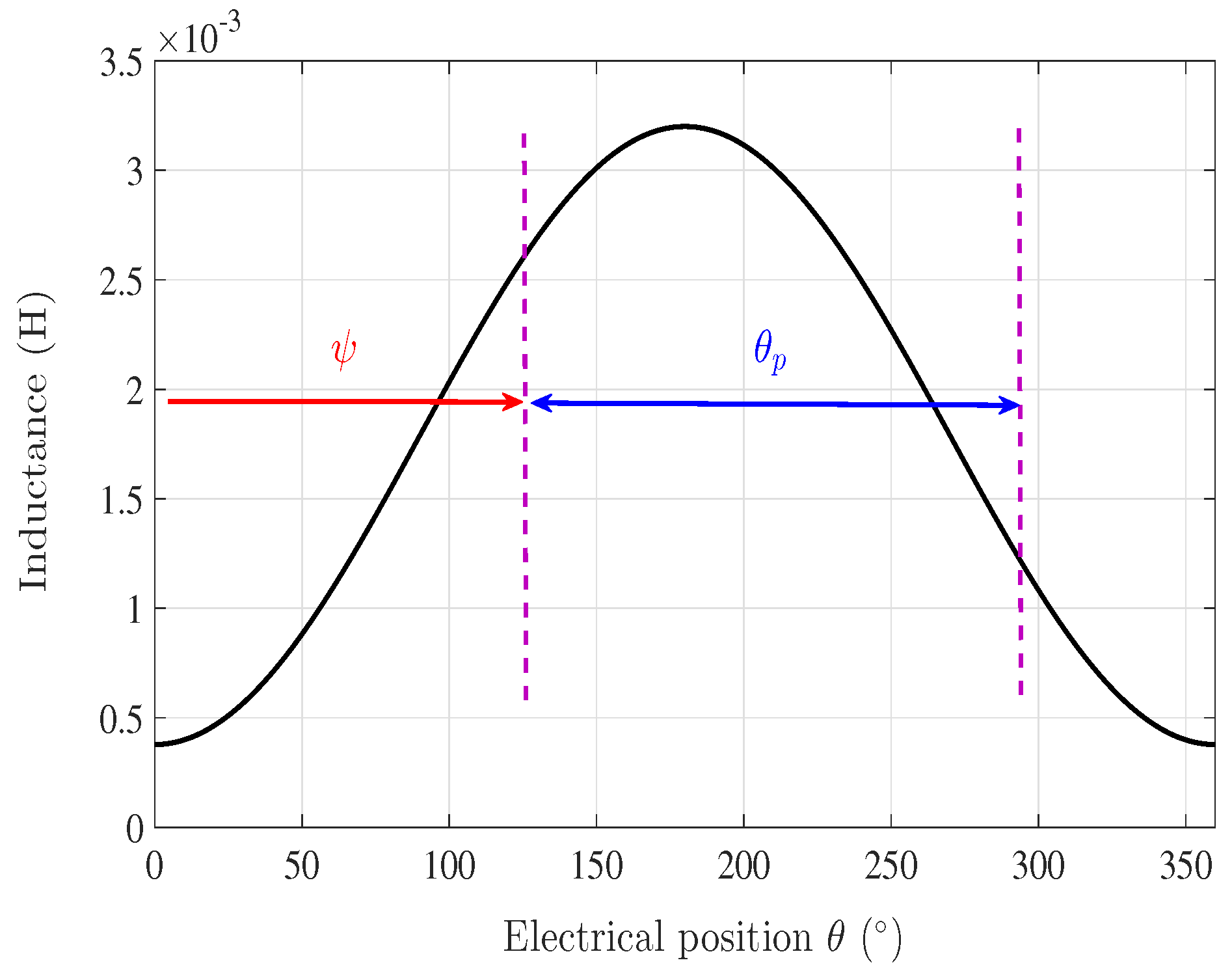
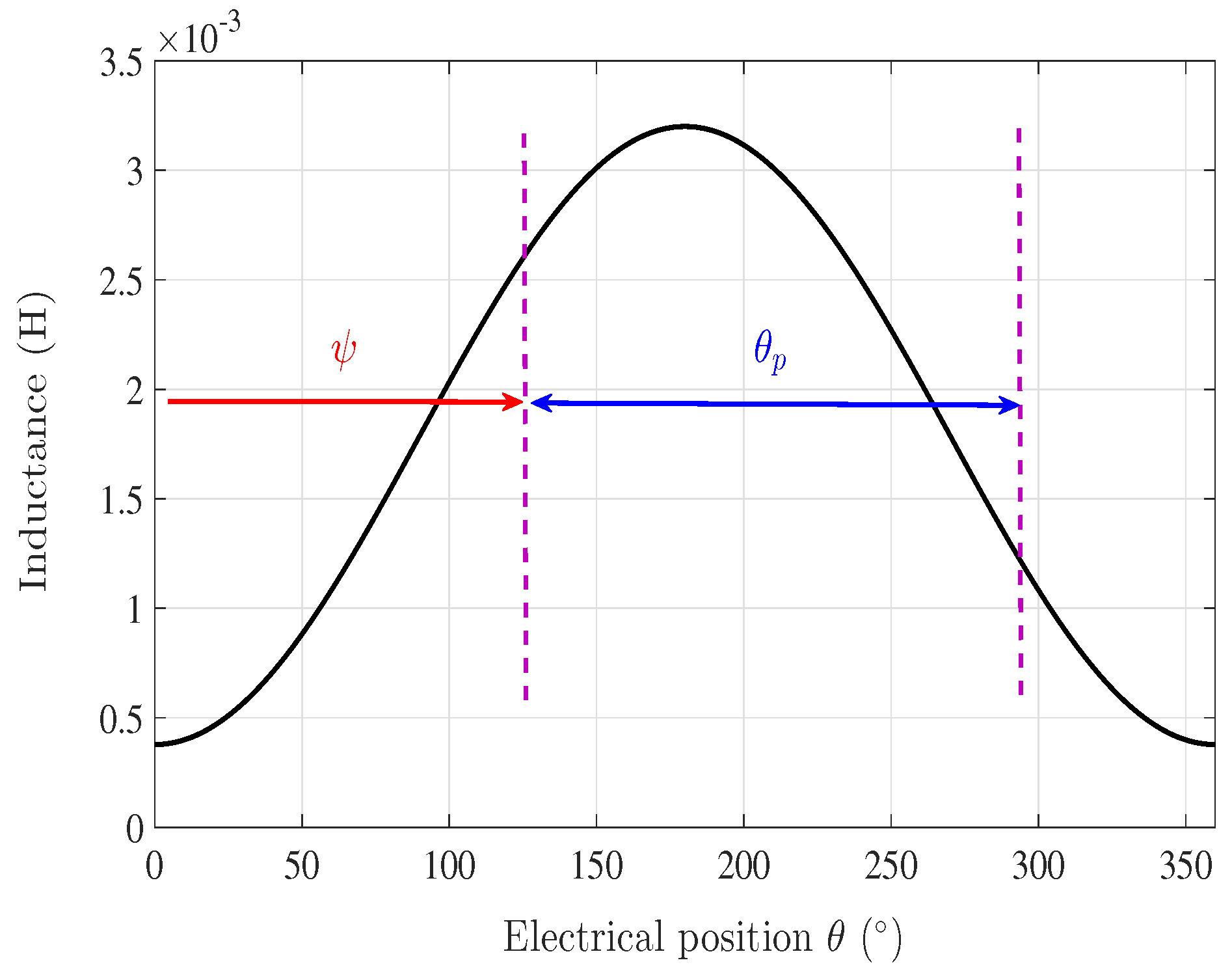
2.1. Basics of Switched Reluctance Generator
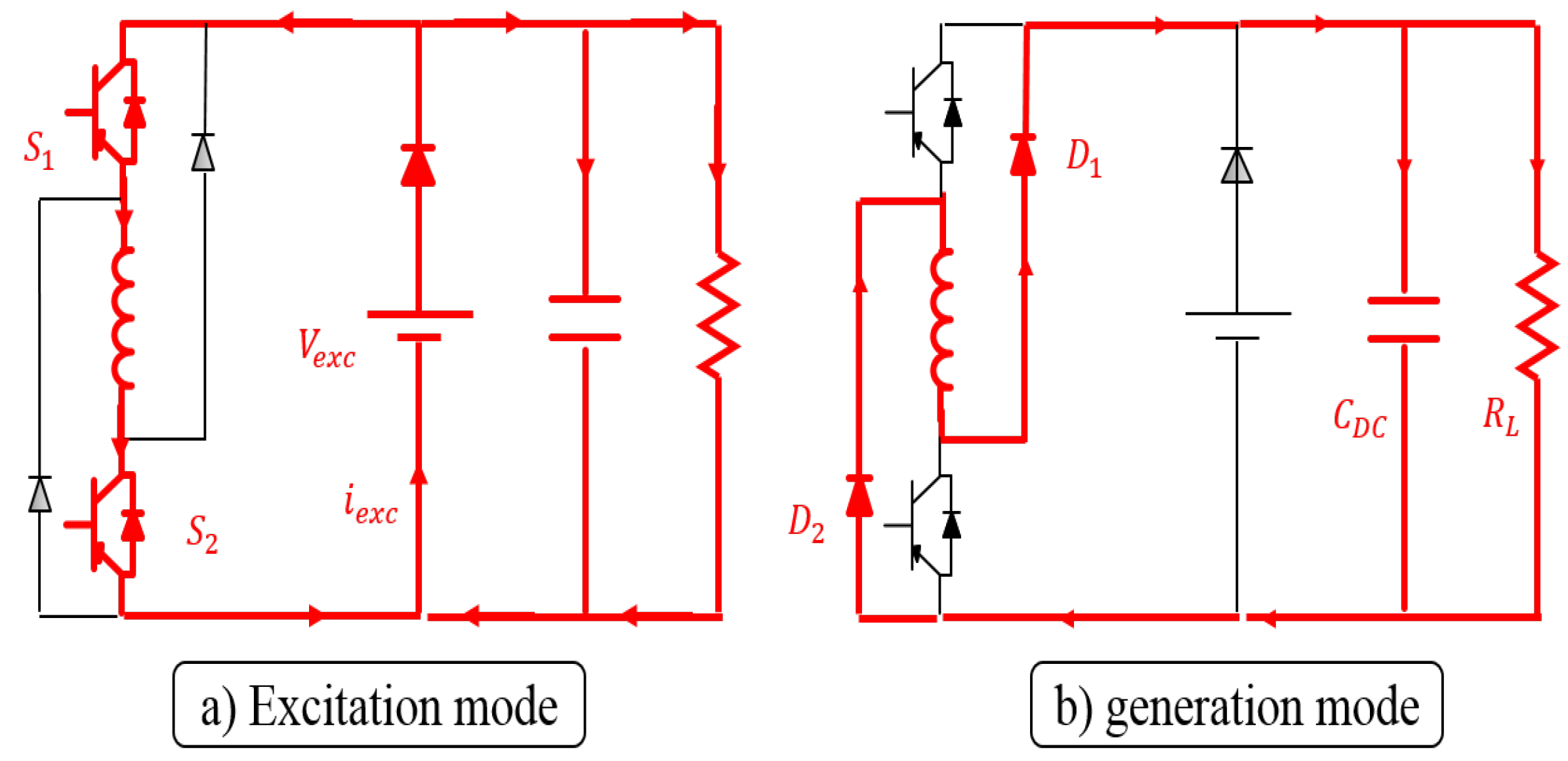
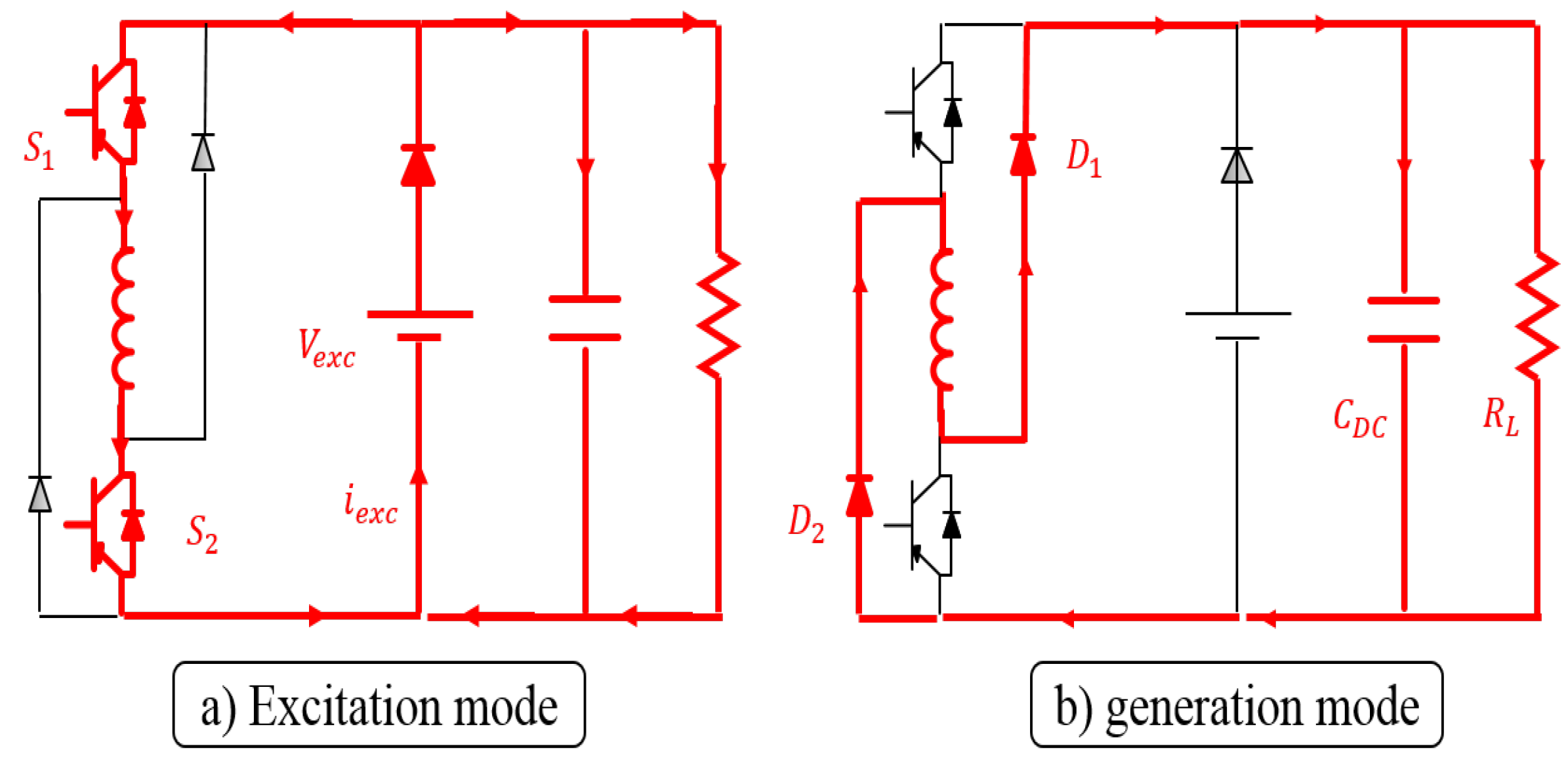
2.2. SRG Operating Modes
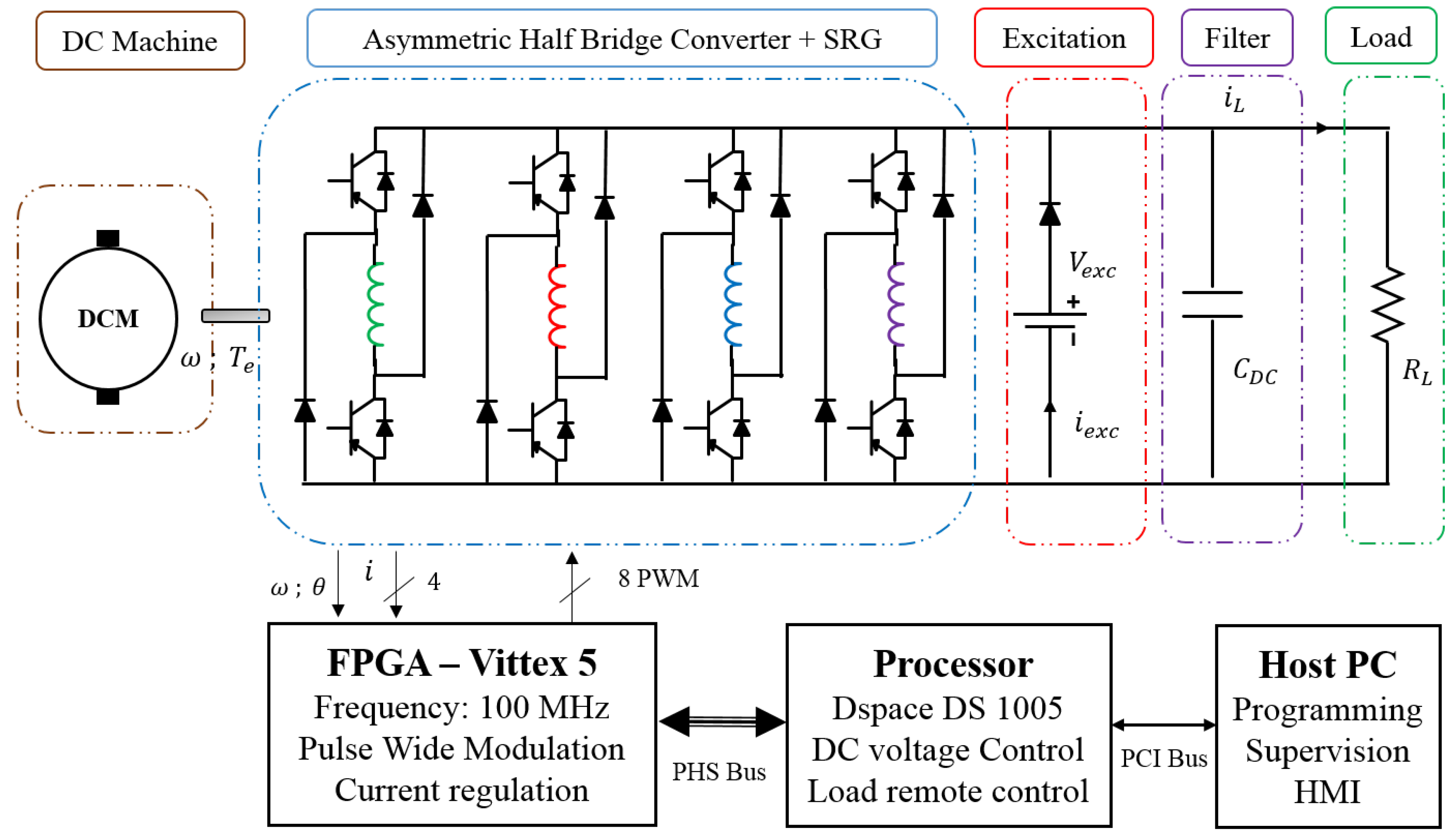
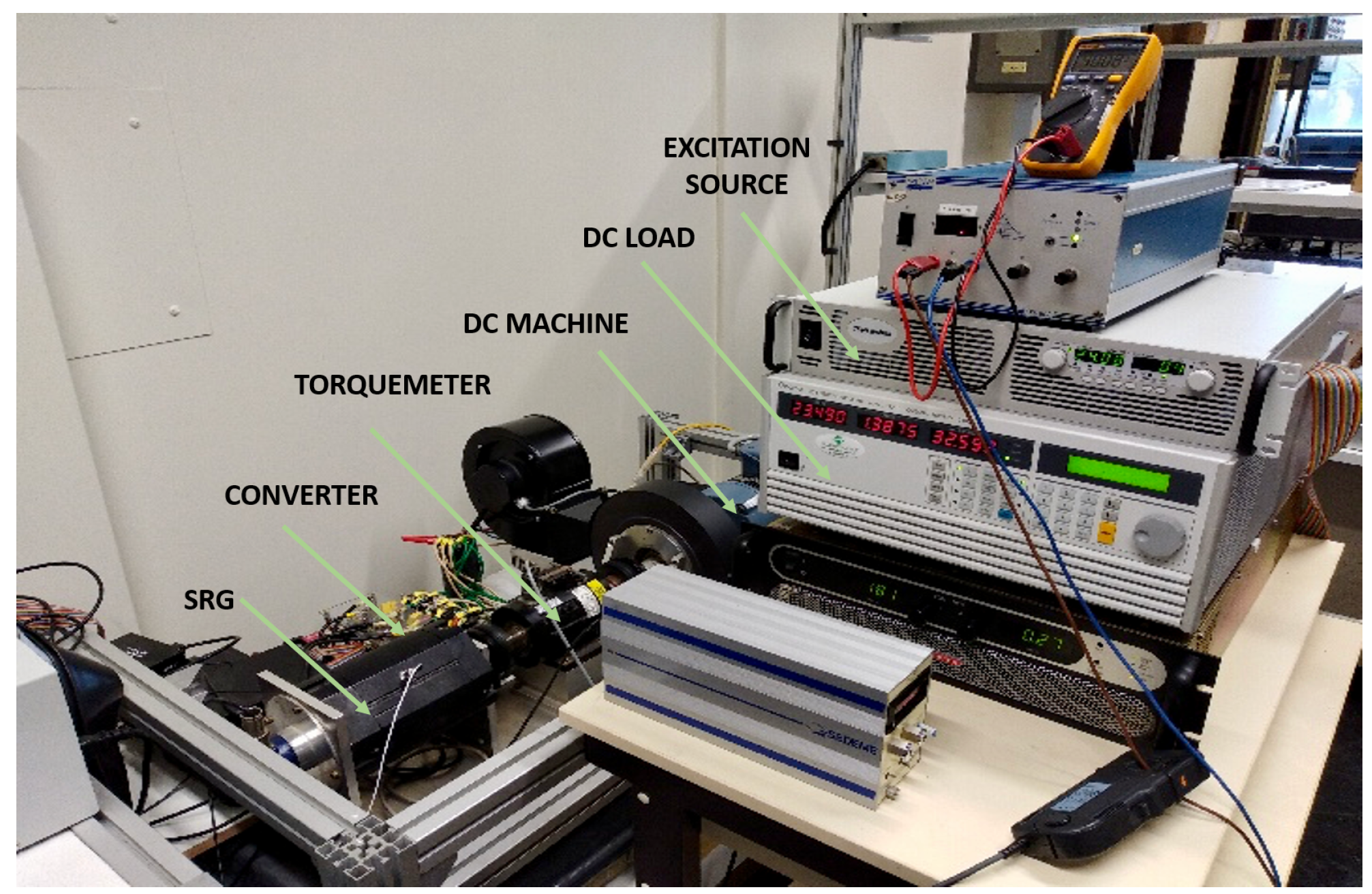
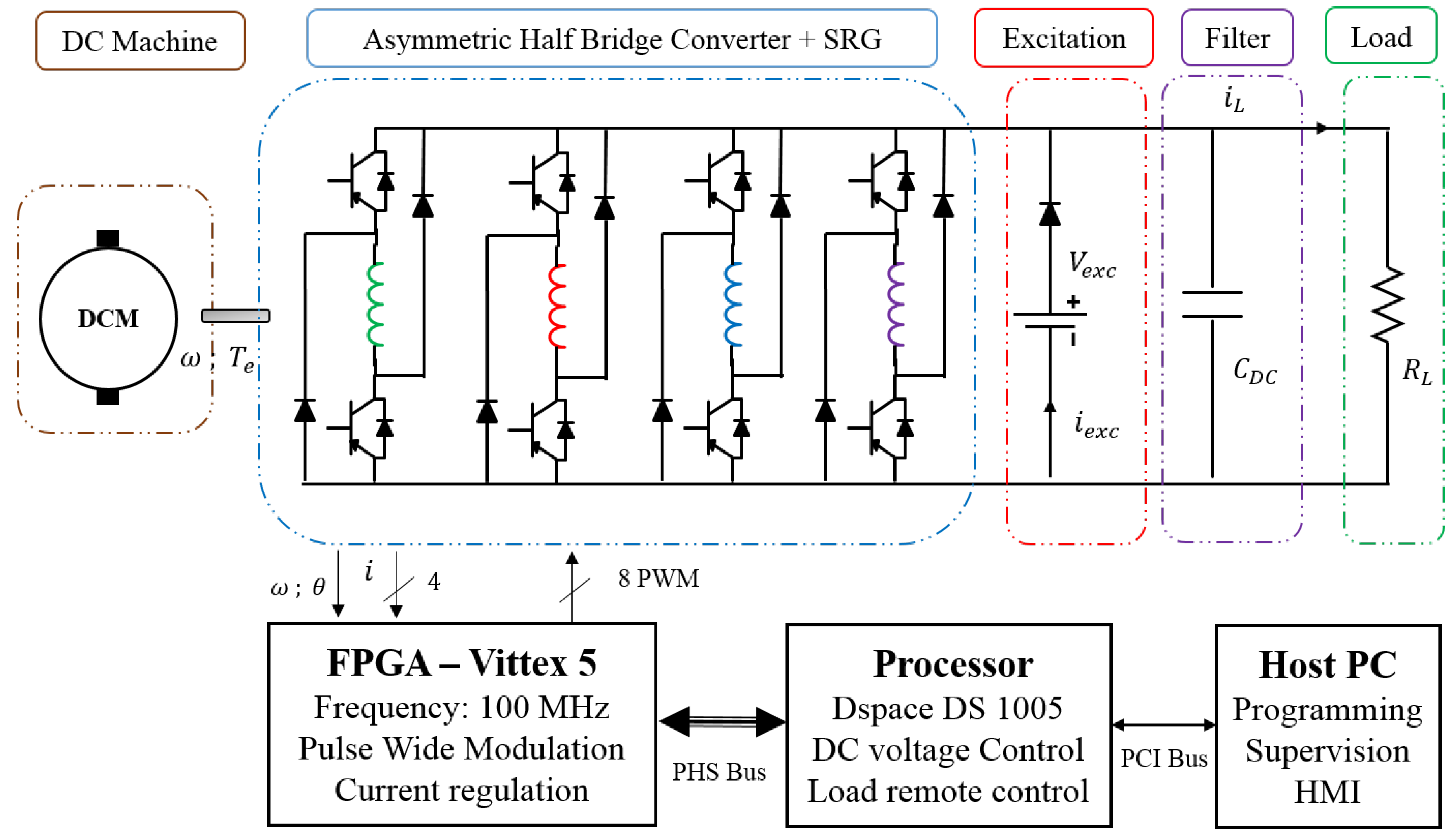
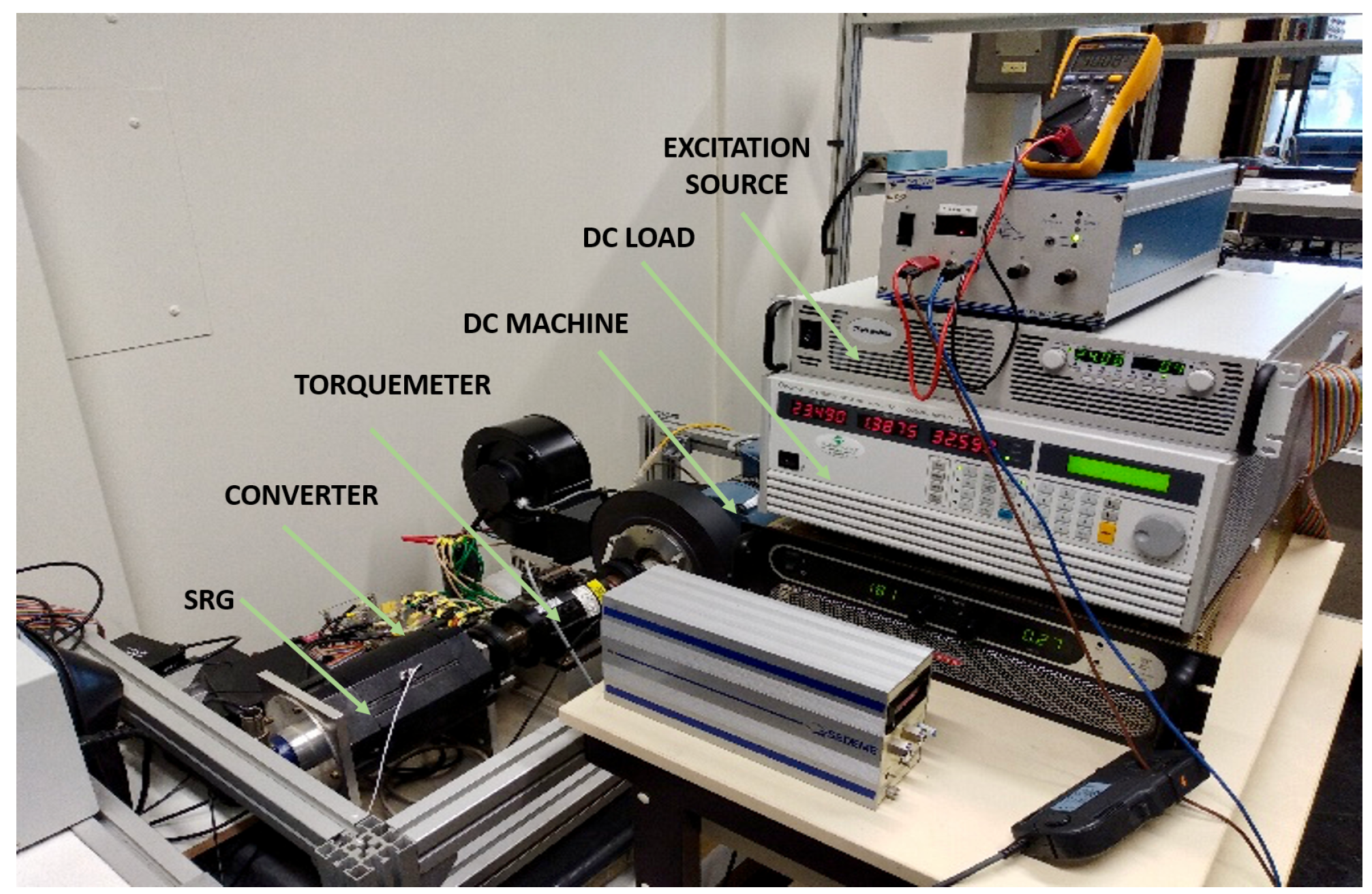
2.3. Experimental Setup
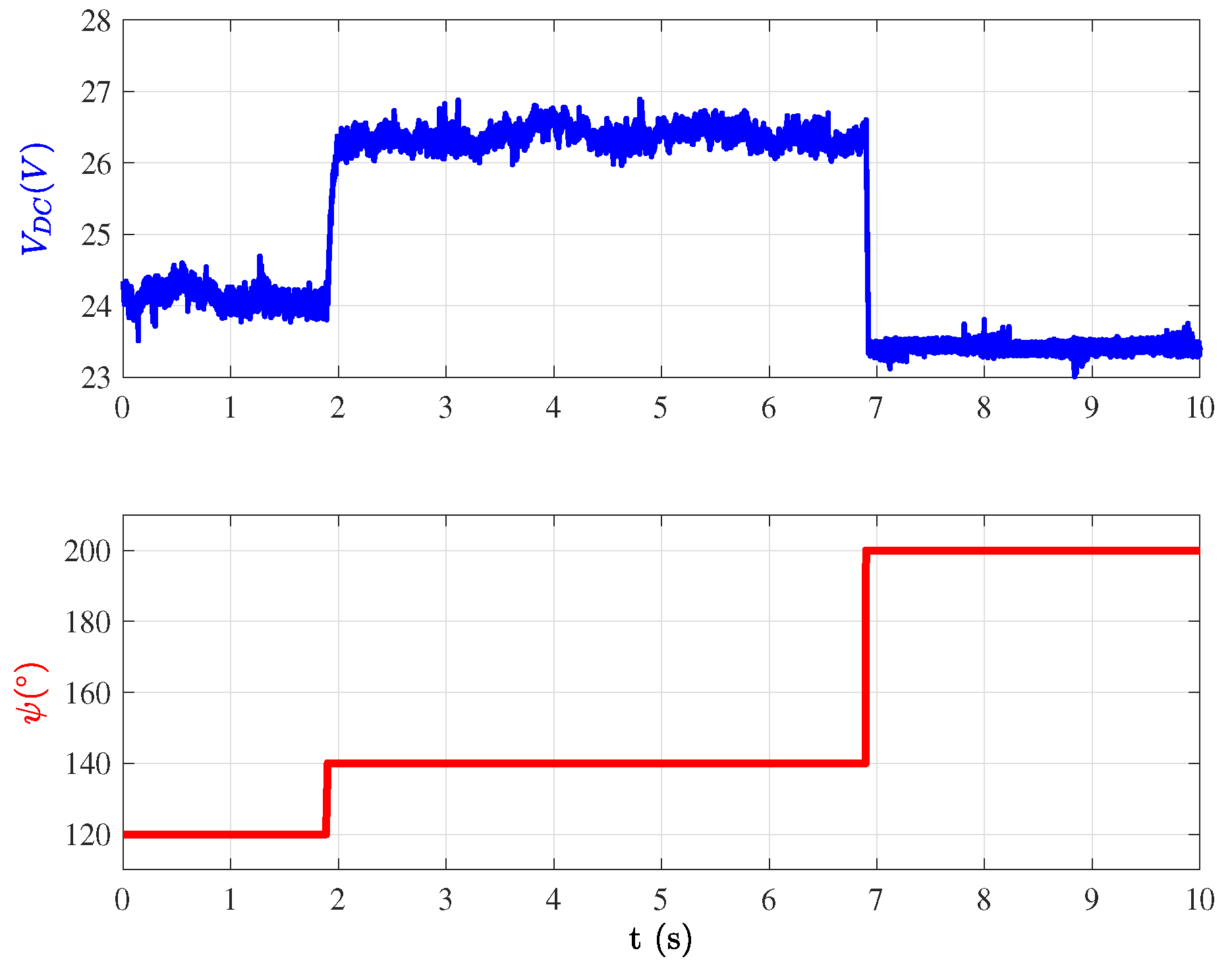
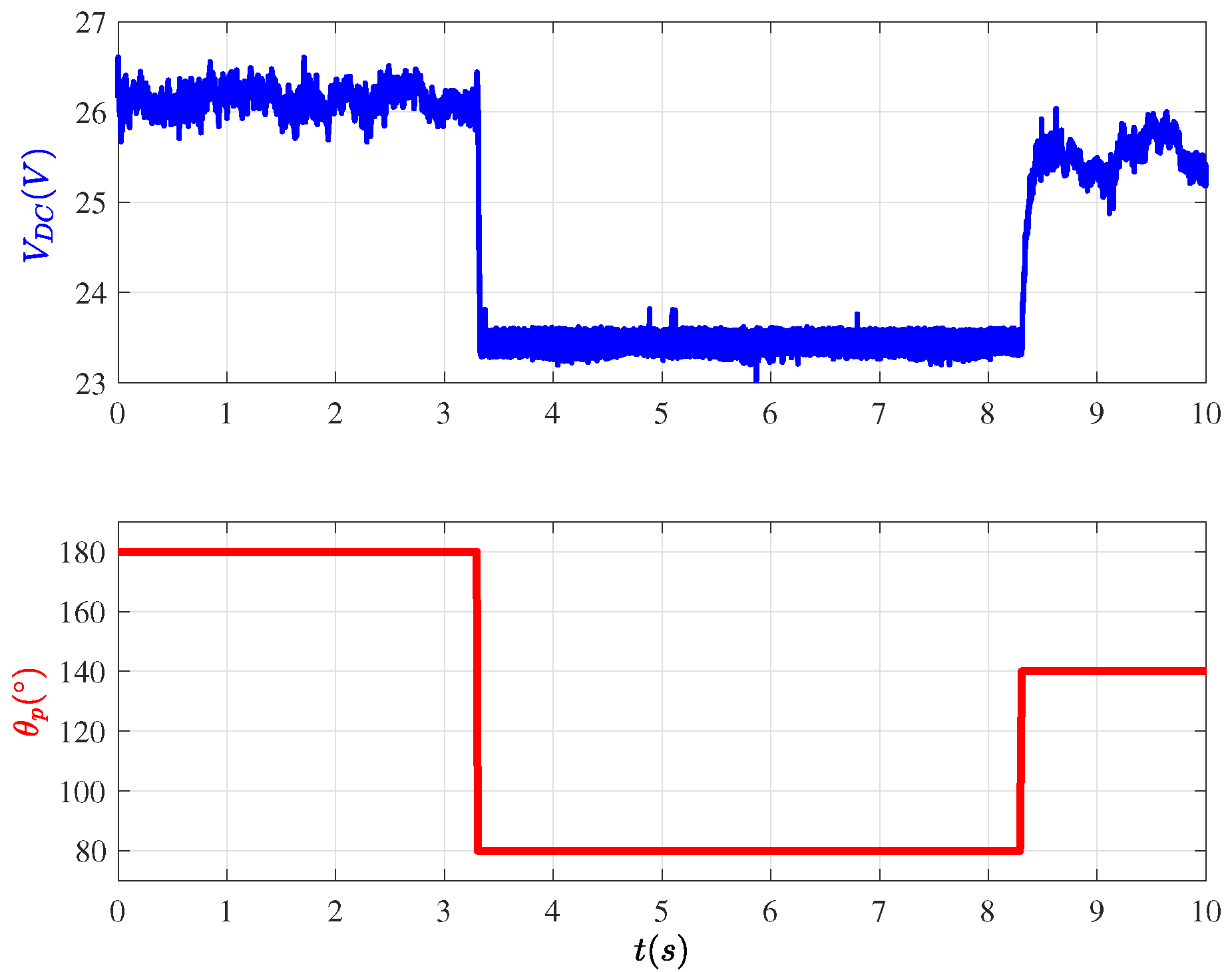
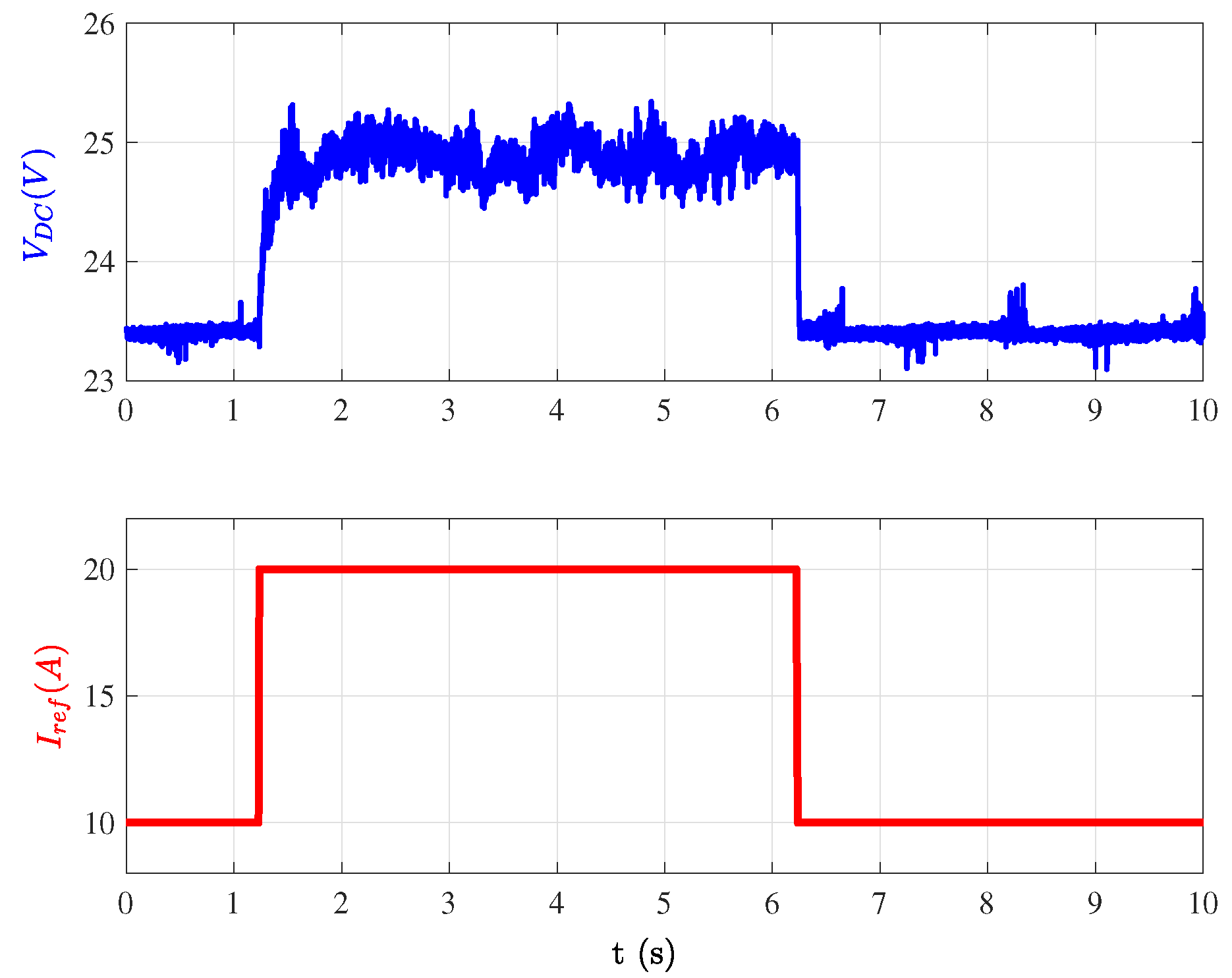
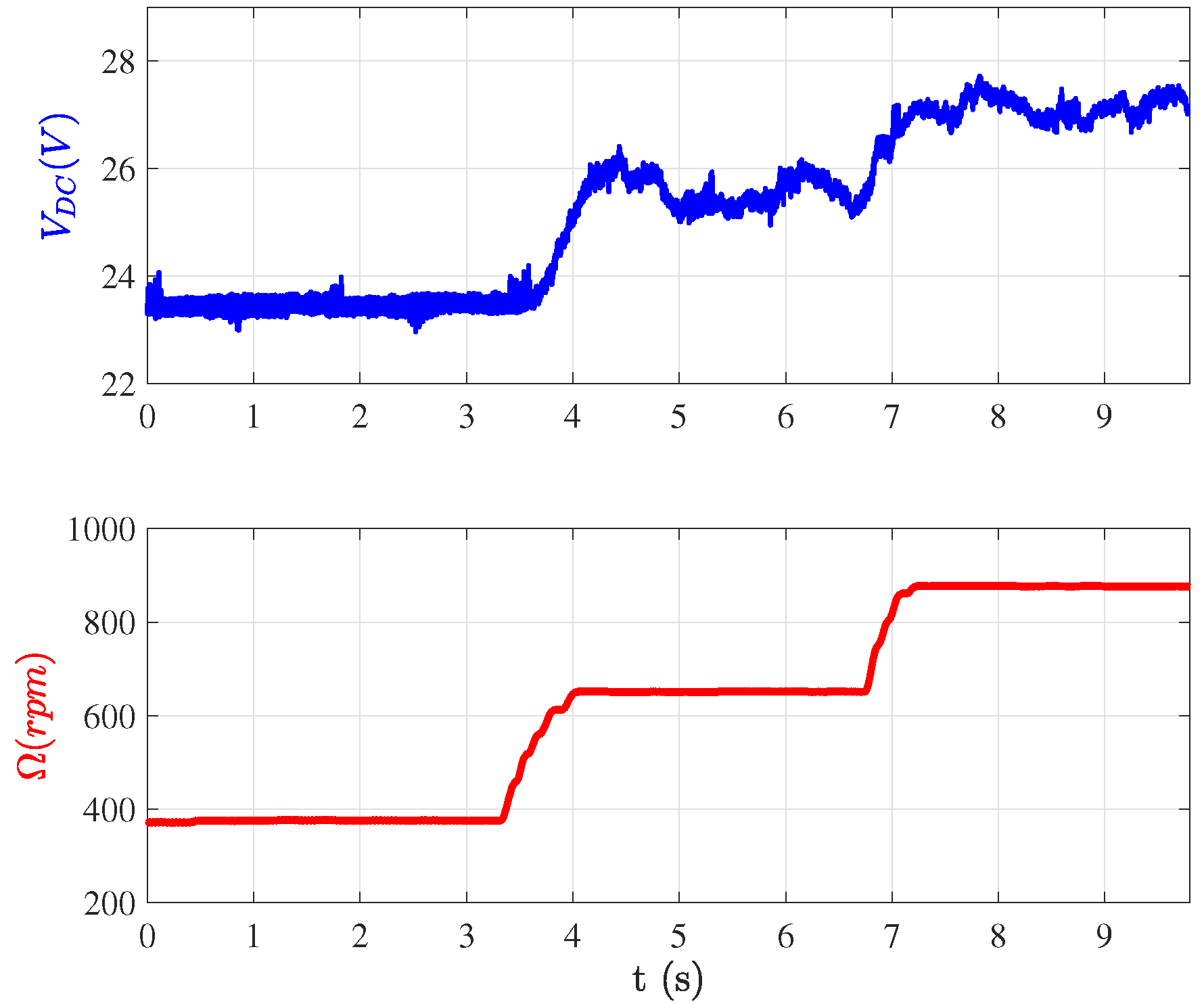
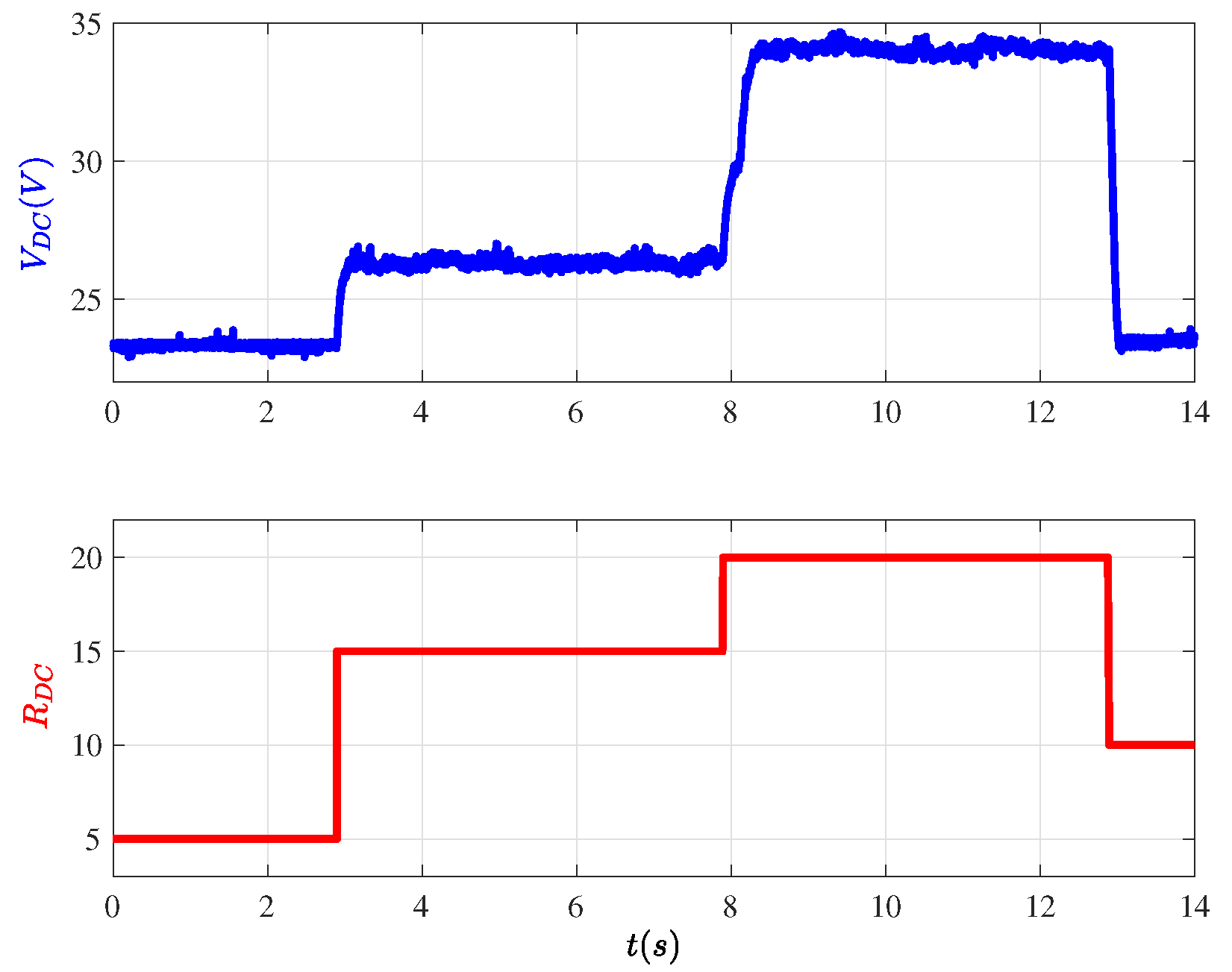
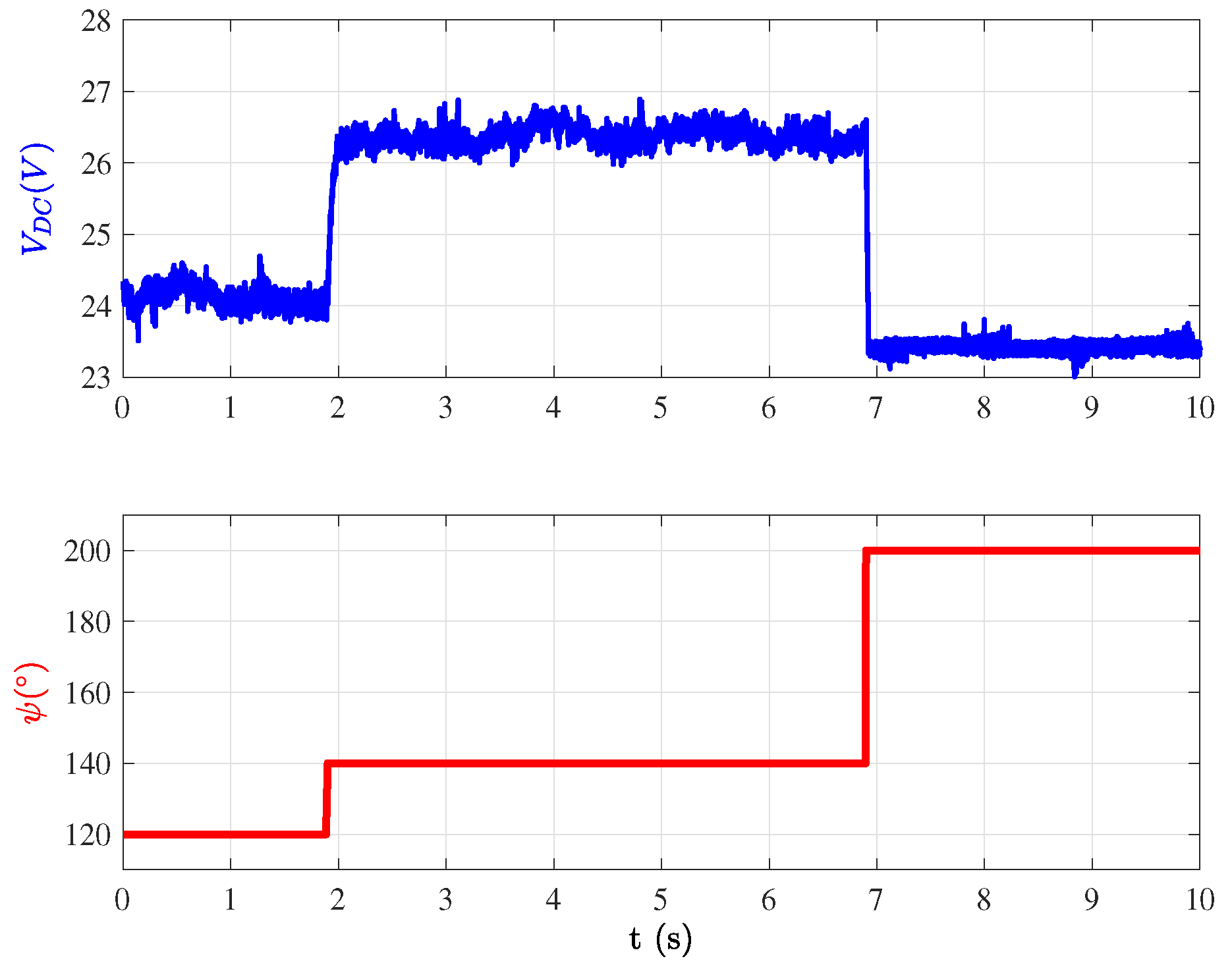
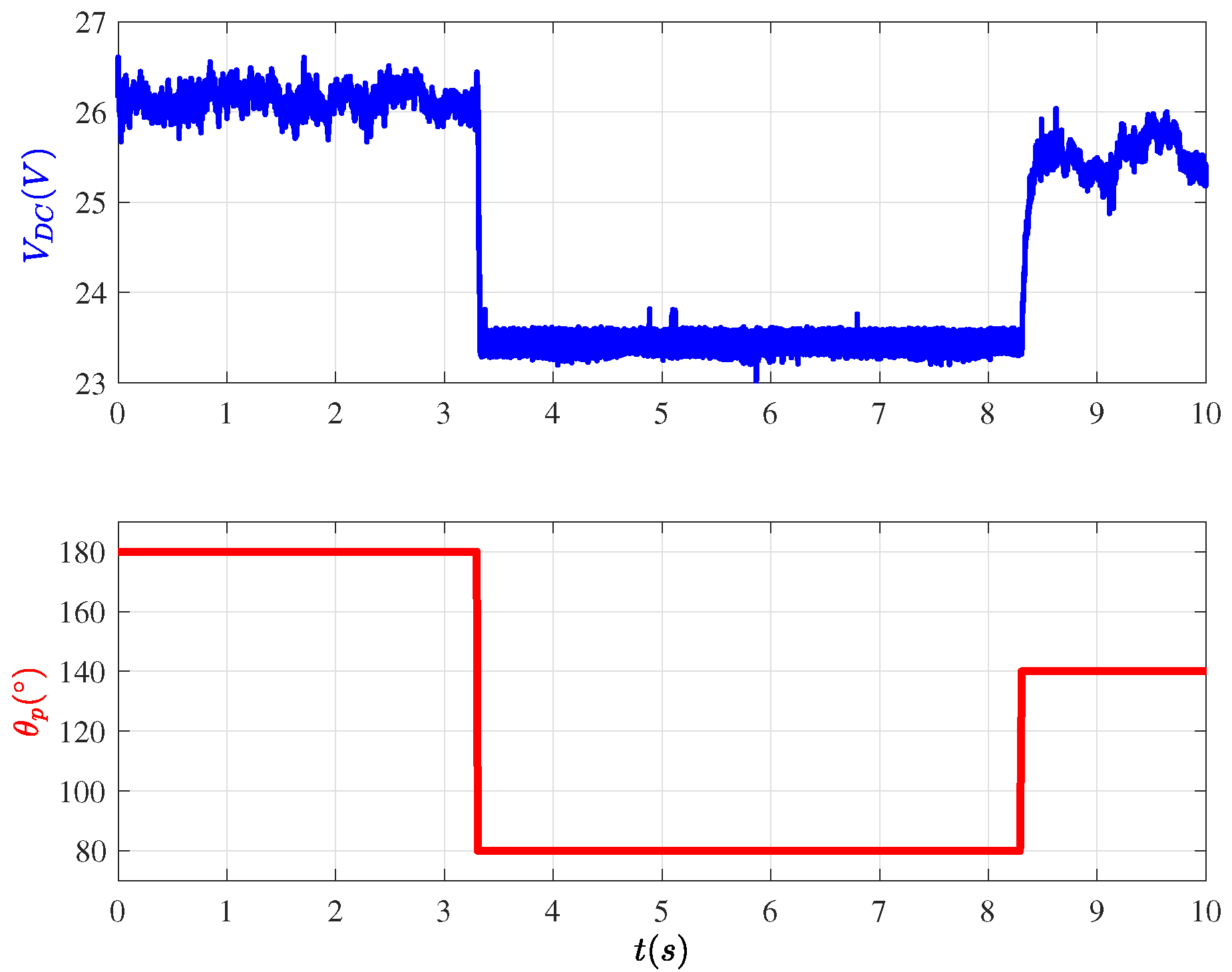
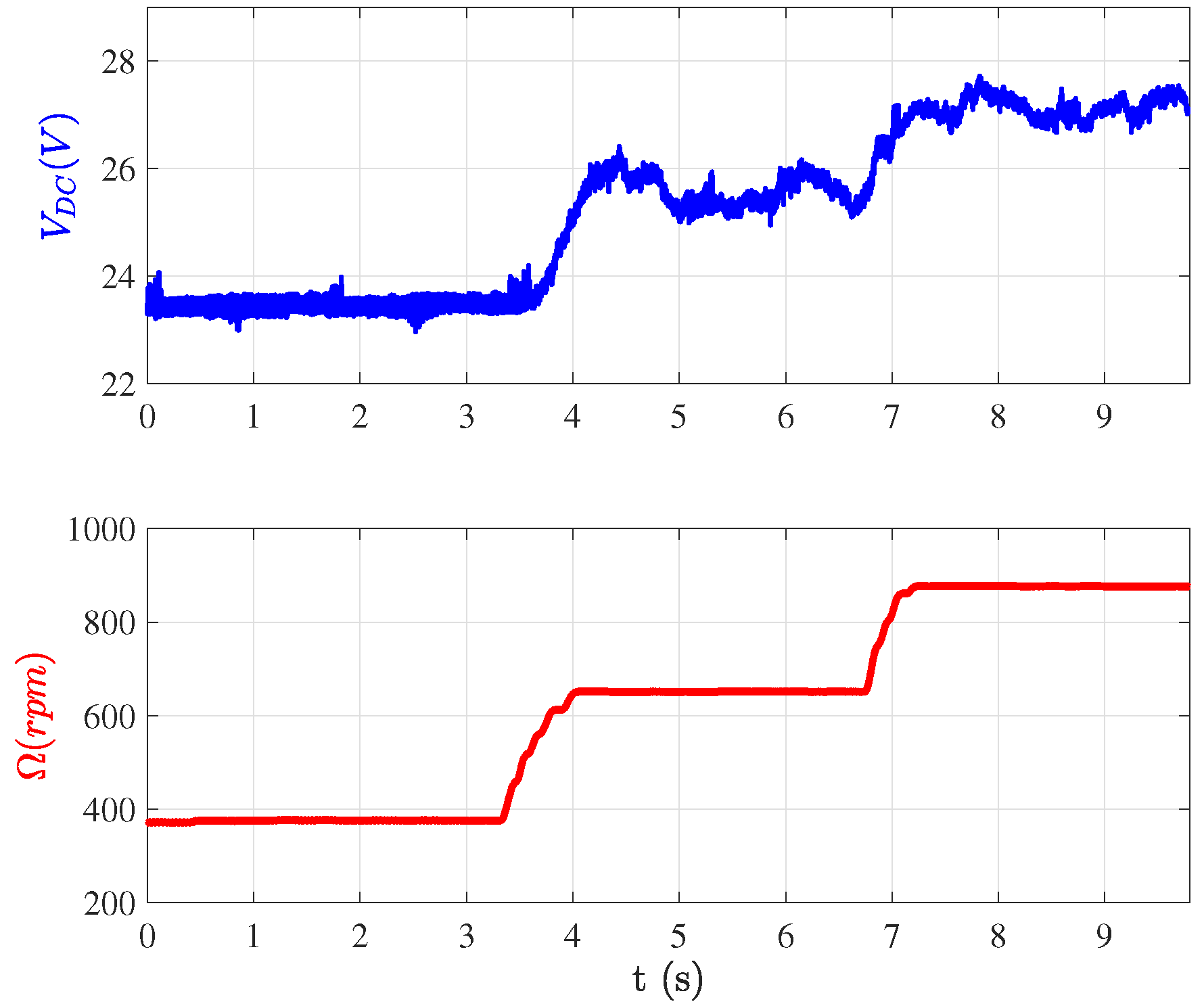
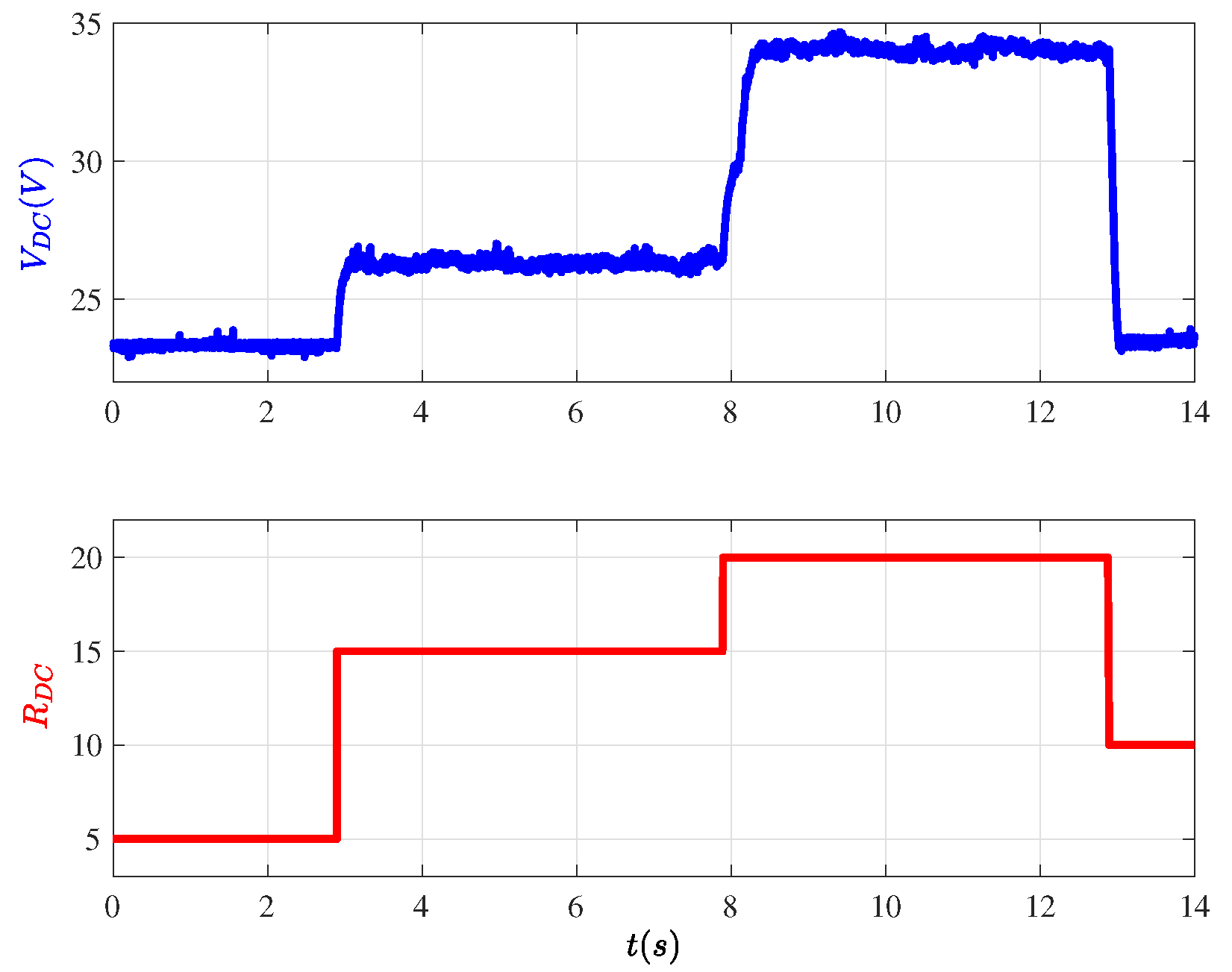
2.4. DC Bus Voltage Behavior under Open-Loop Operation
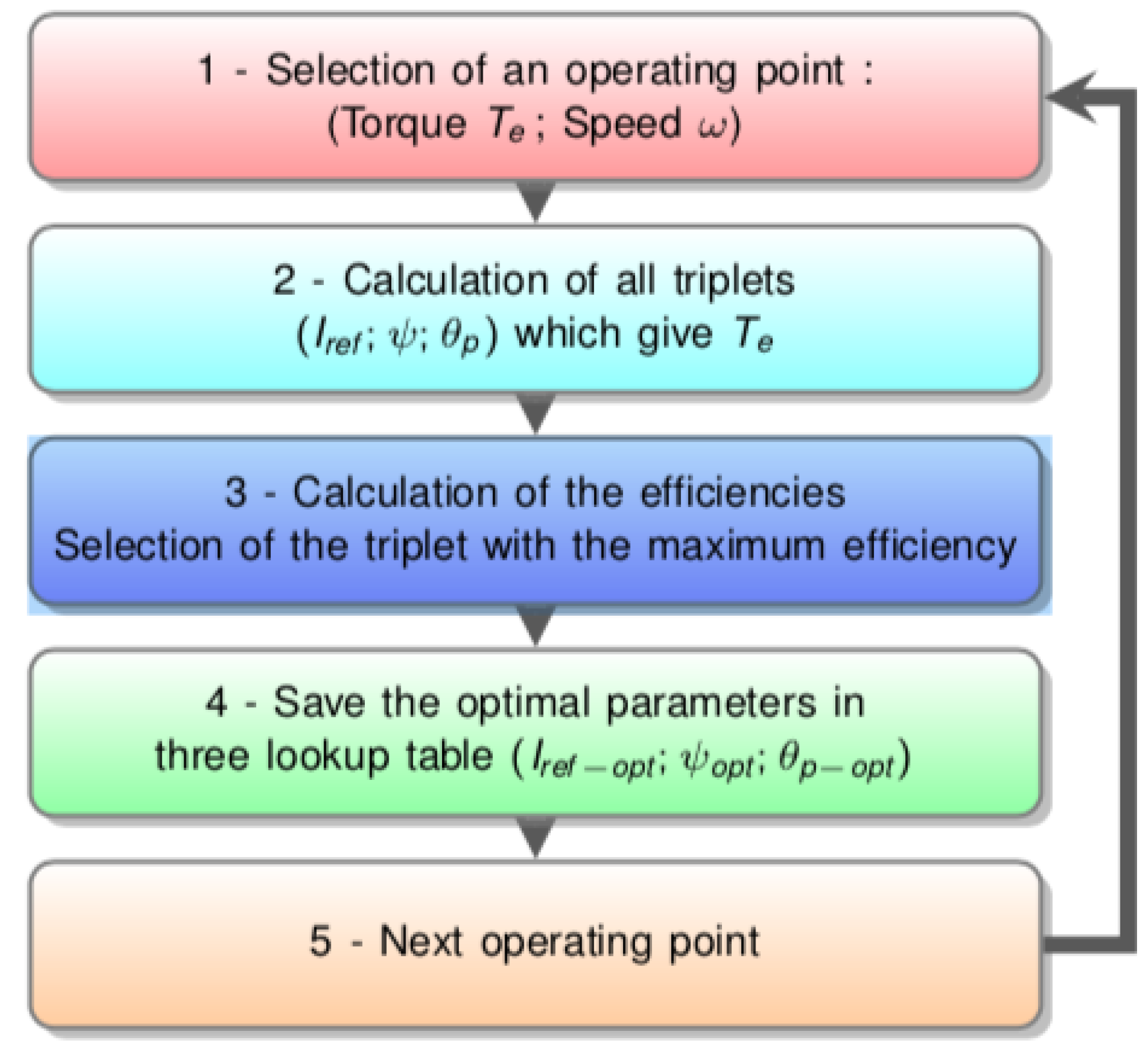
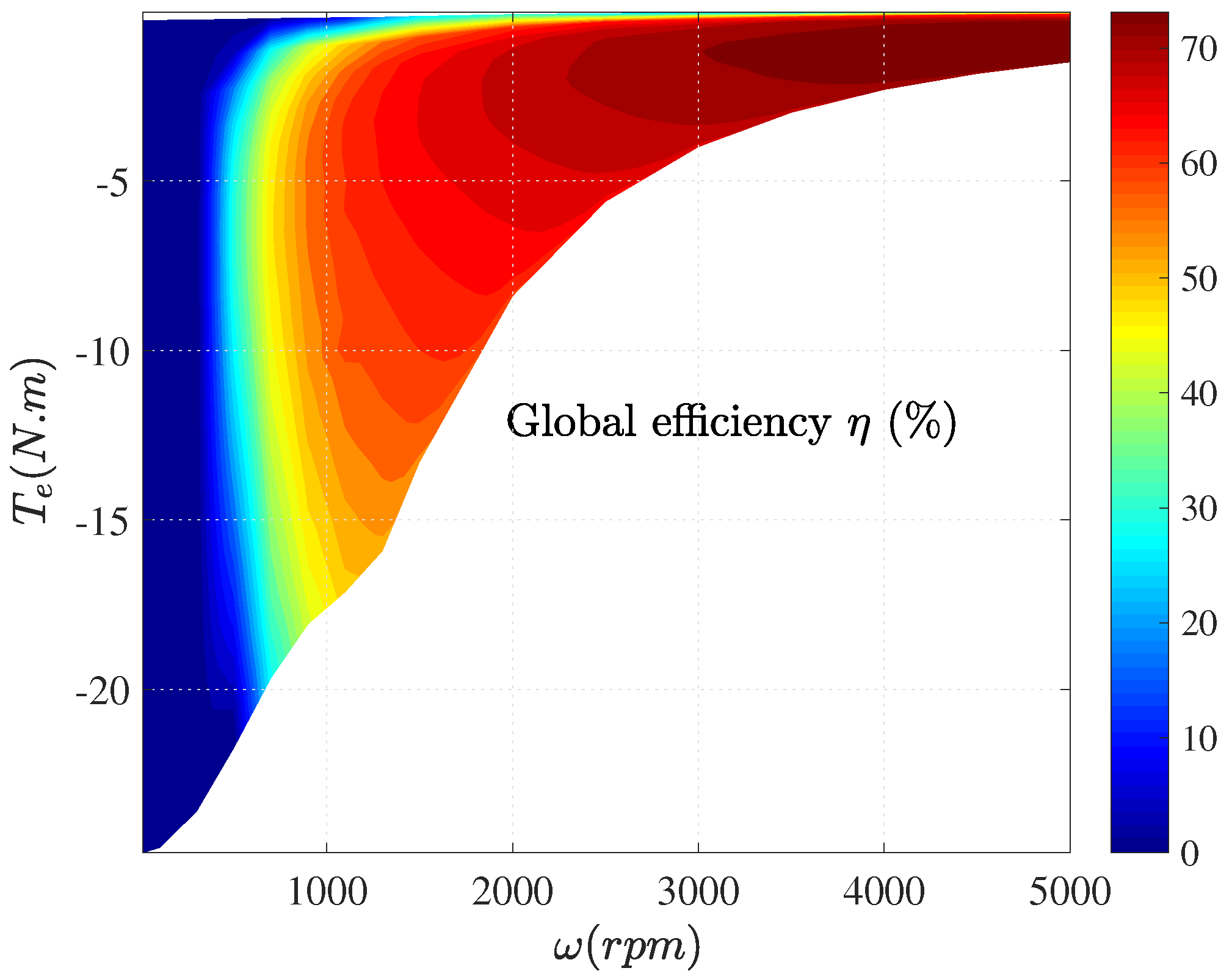
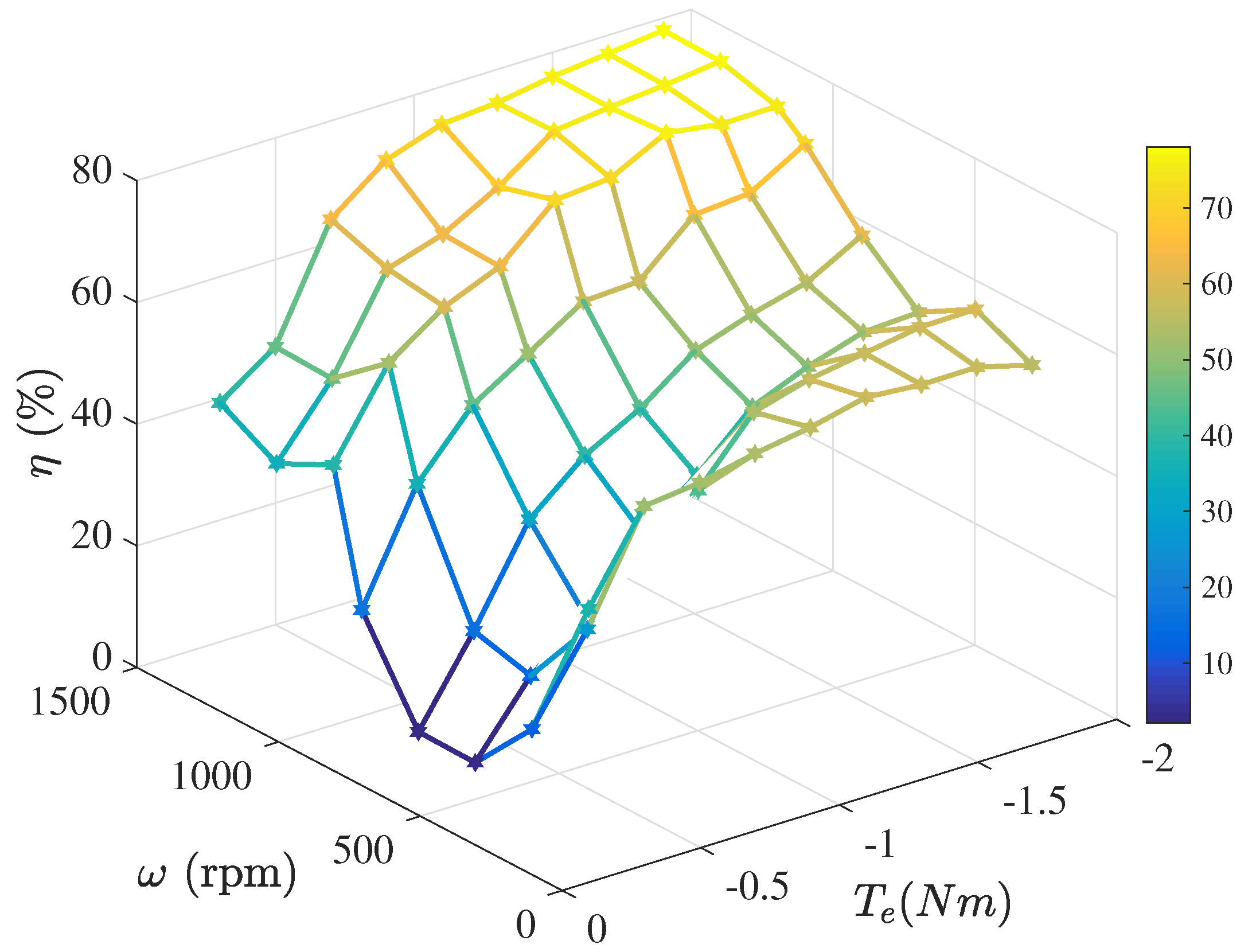
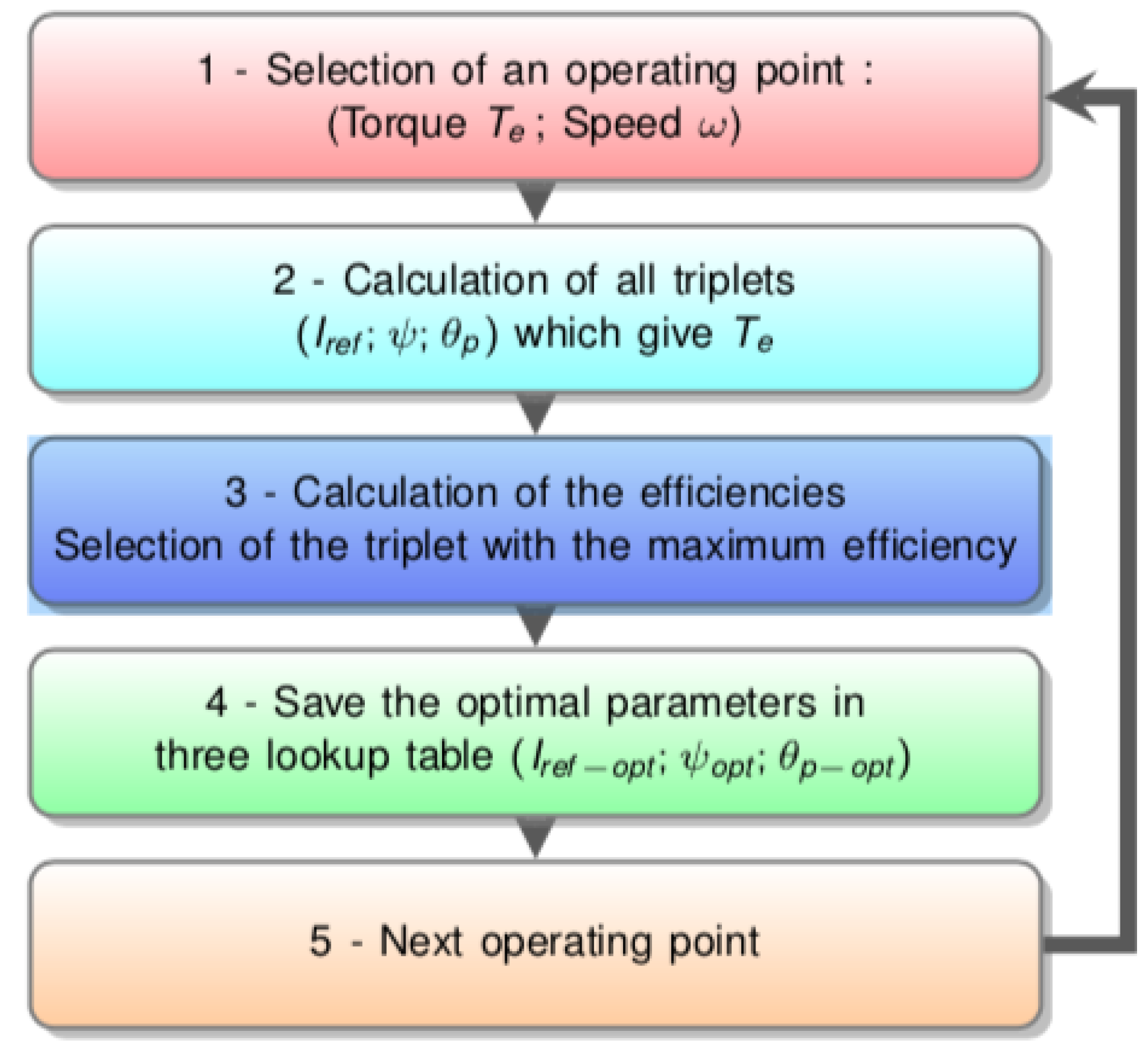
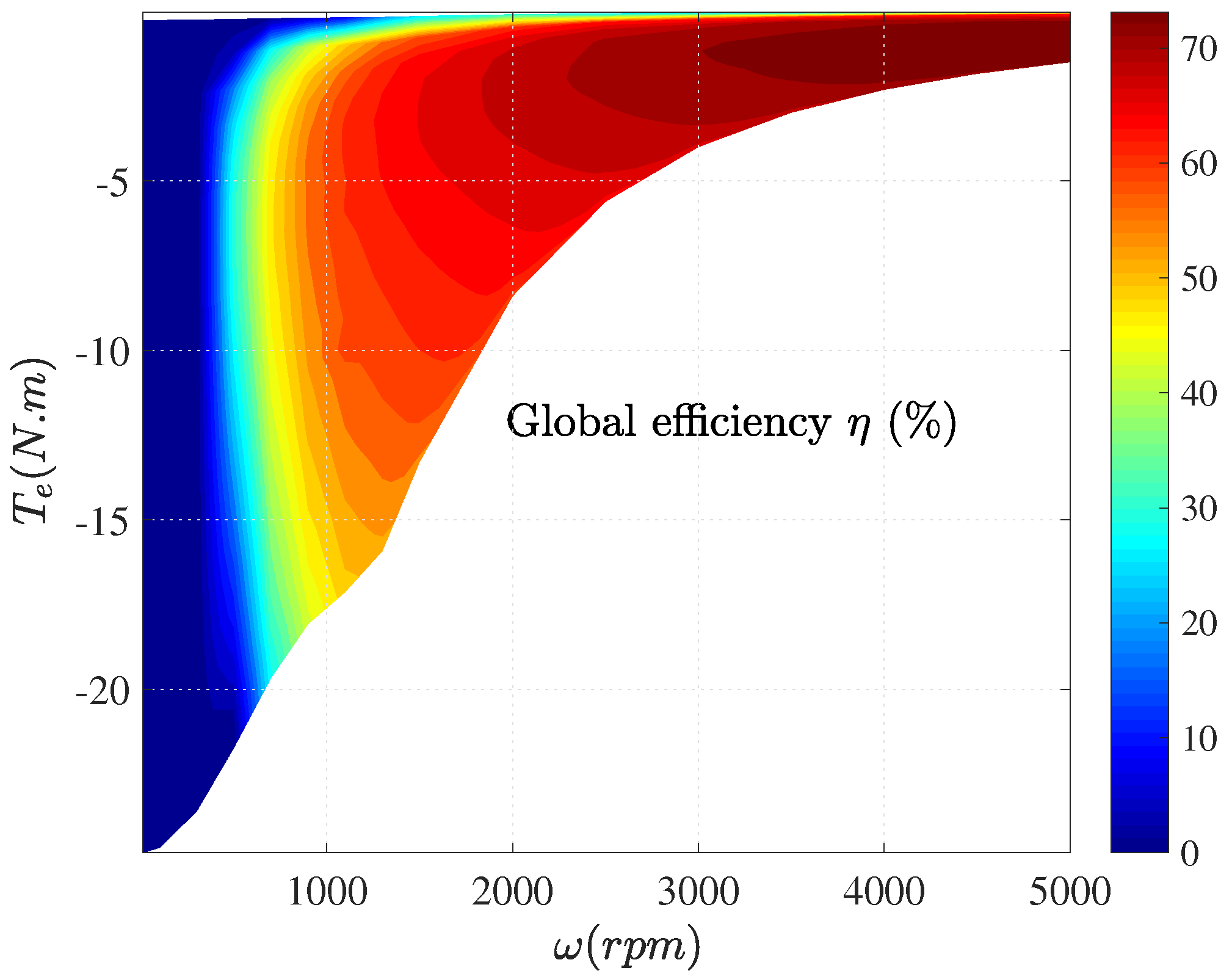
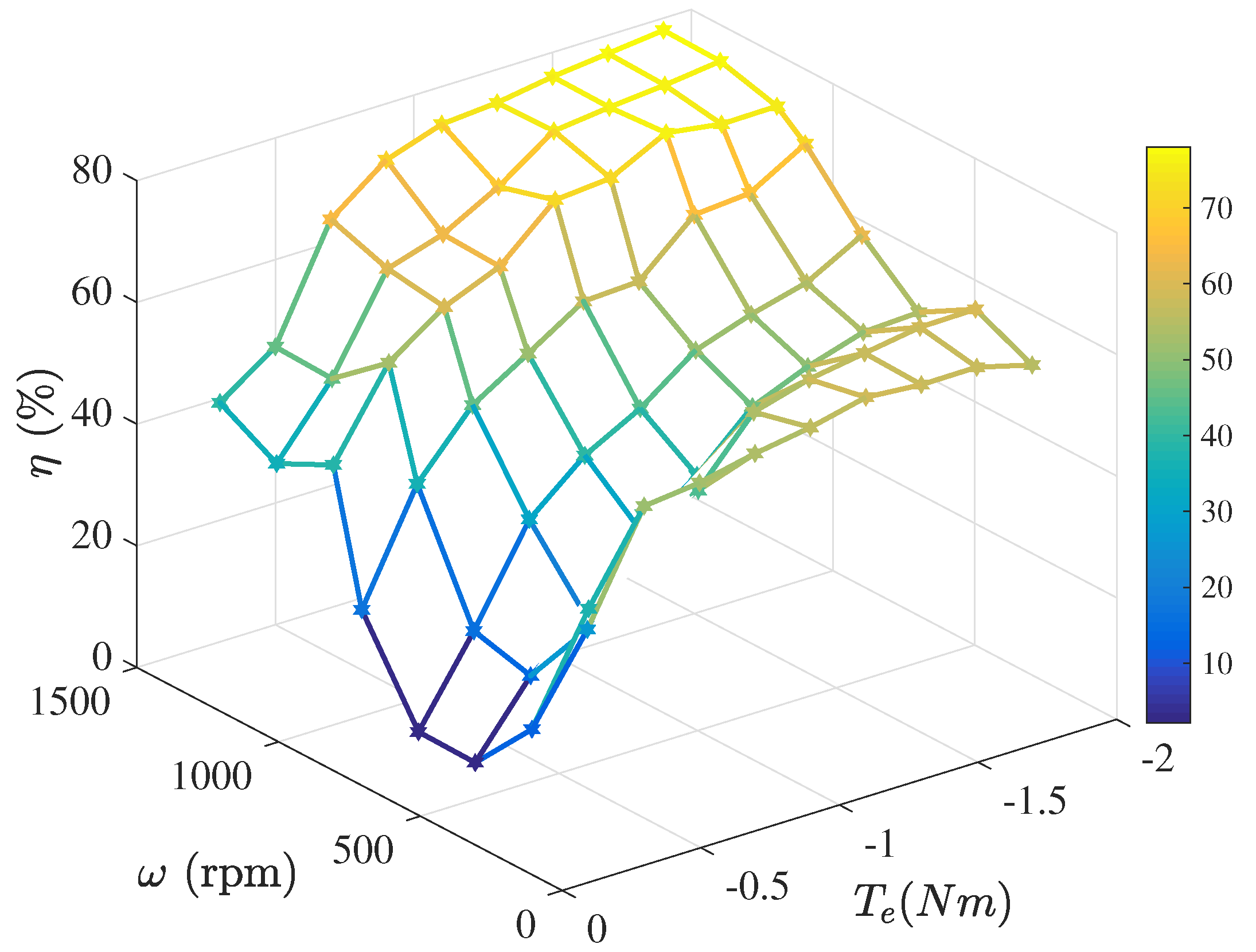
3. Drive Efficiency Optimization
- 17 speed values, in the range rpm and
- 91 Torque values, in the range Nm
- in the interval A with a 5 A step;
- in the interval with a step; and,
- in the interval with a step.
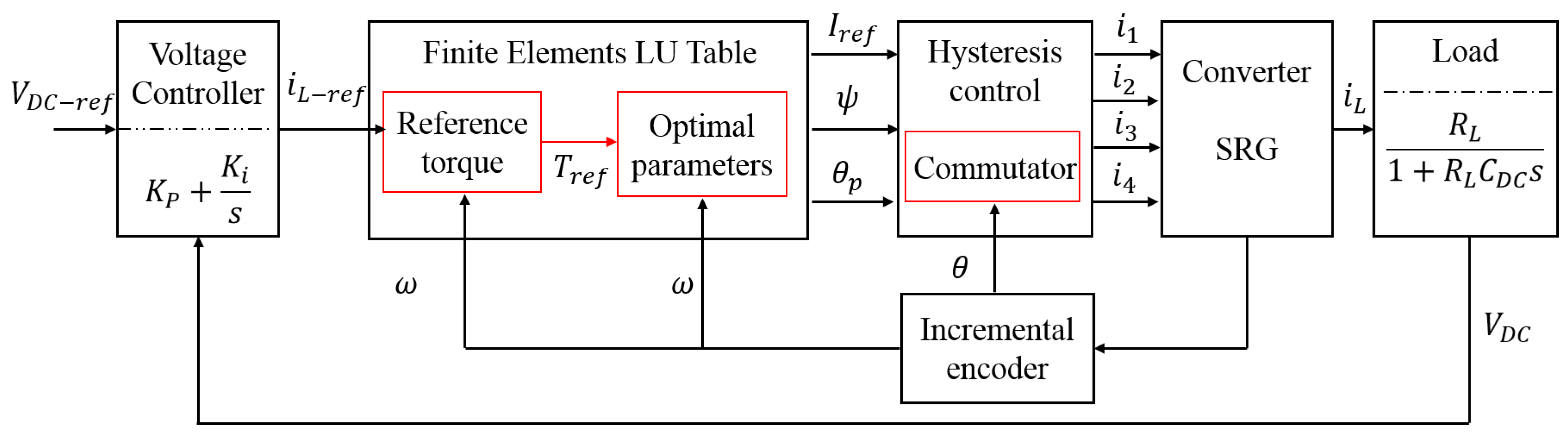
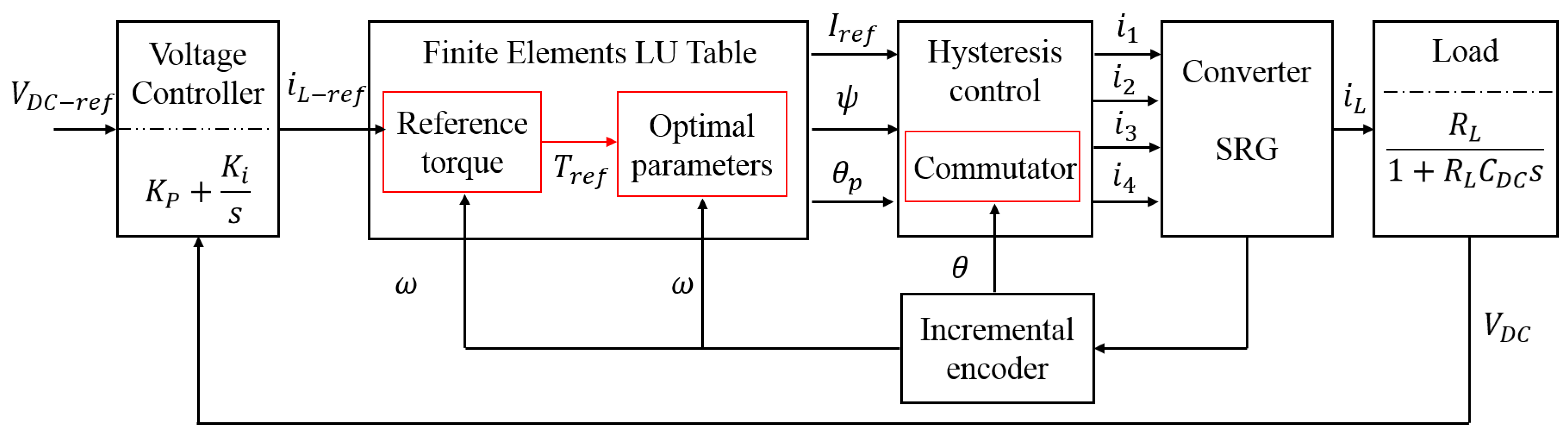
4. Closed Loop Control Strategy
4.1. Control Scheme
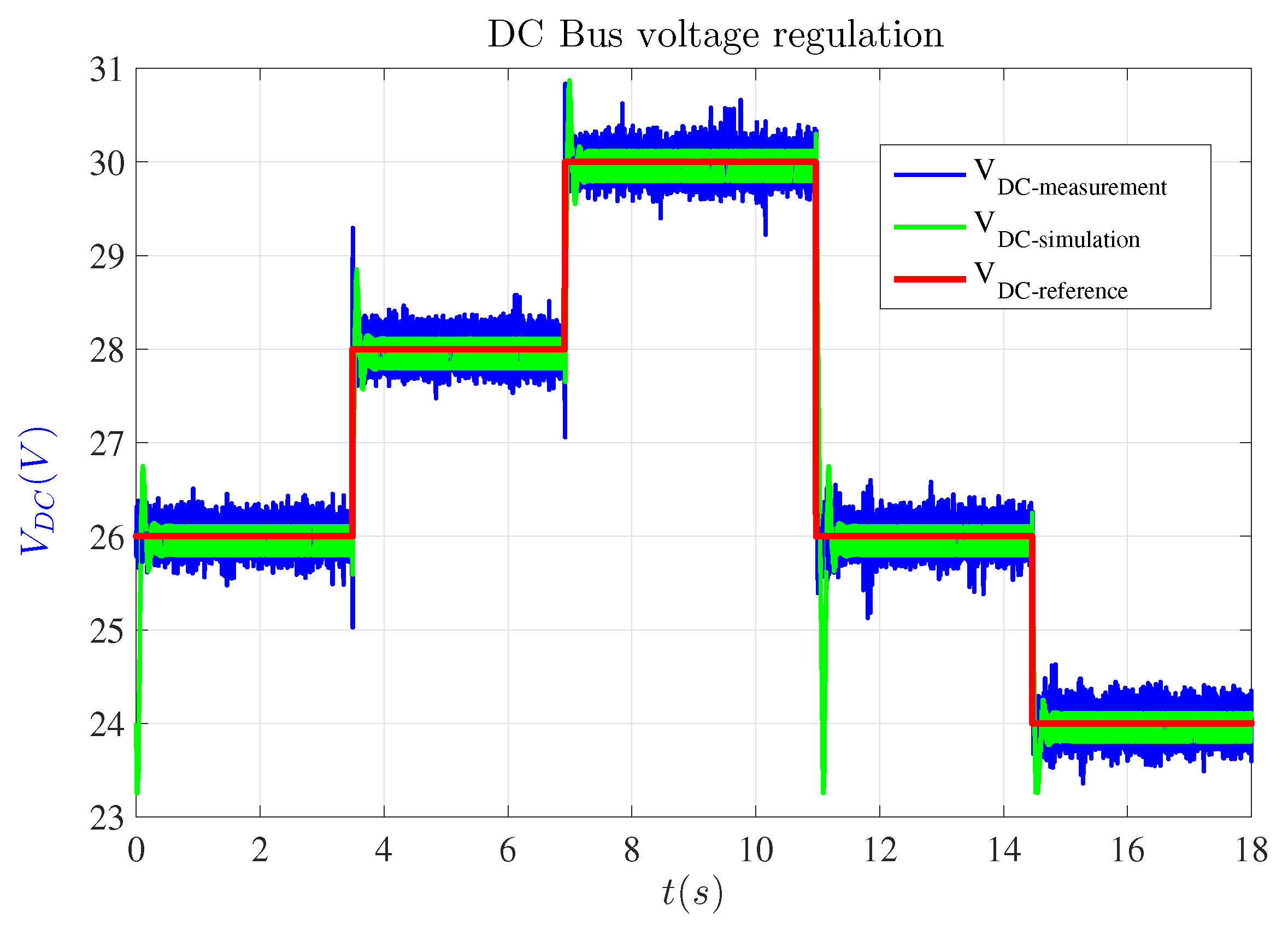
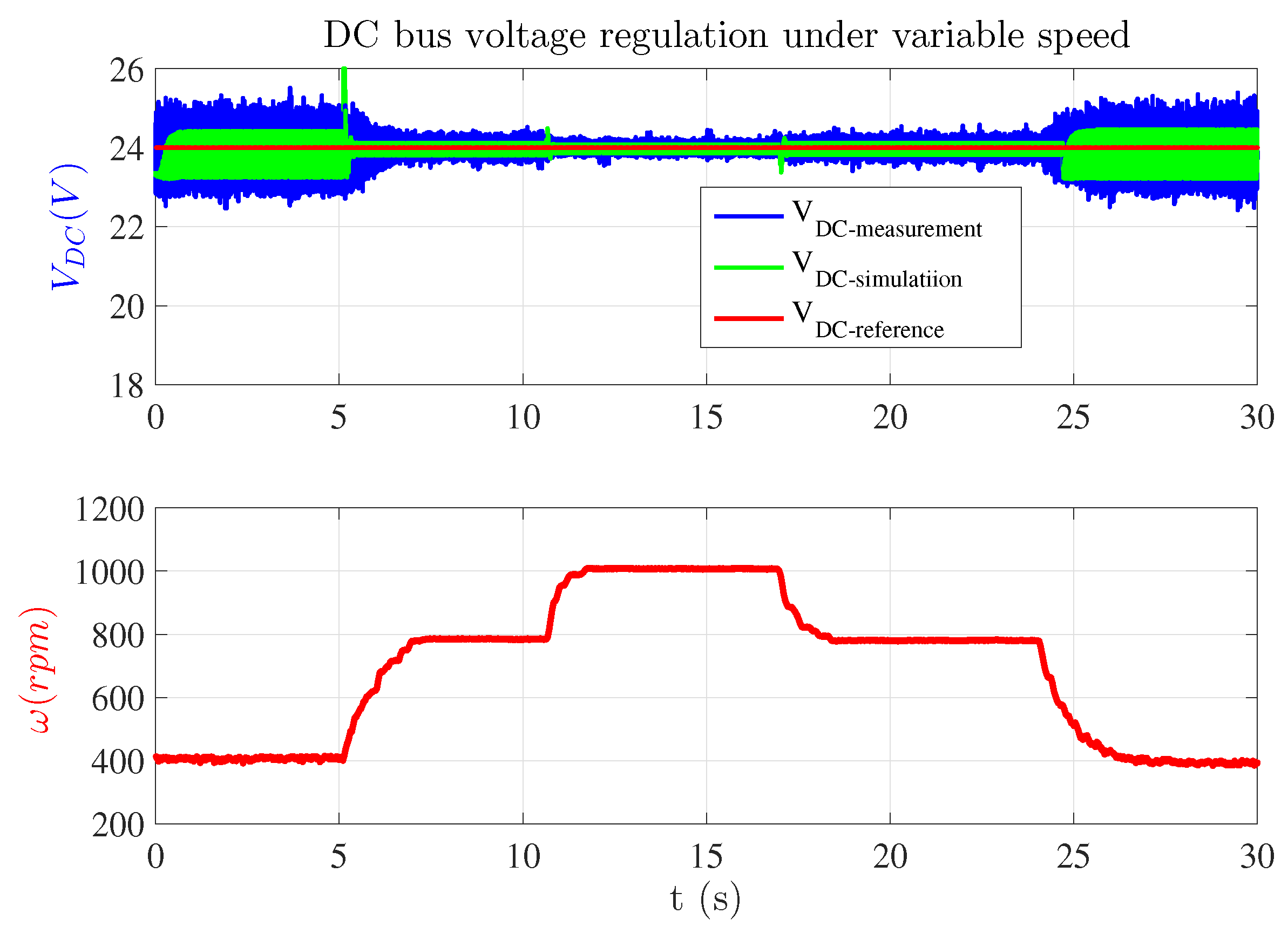
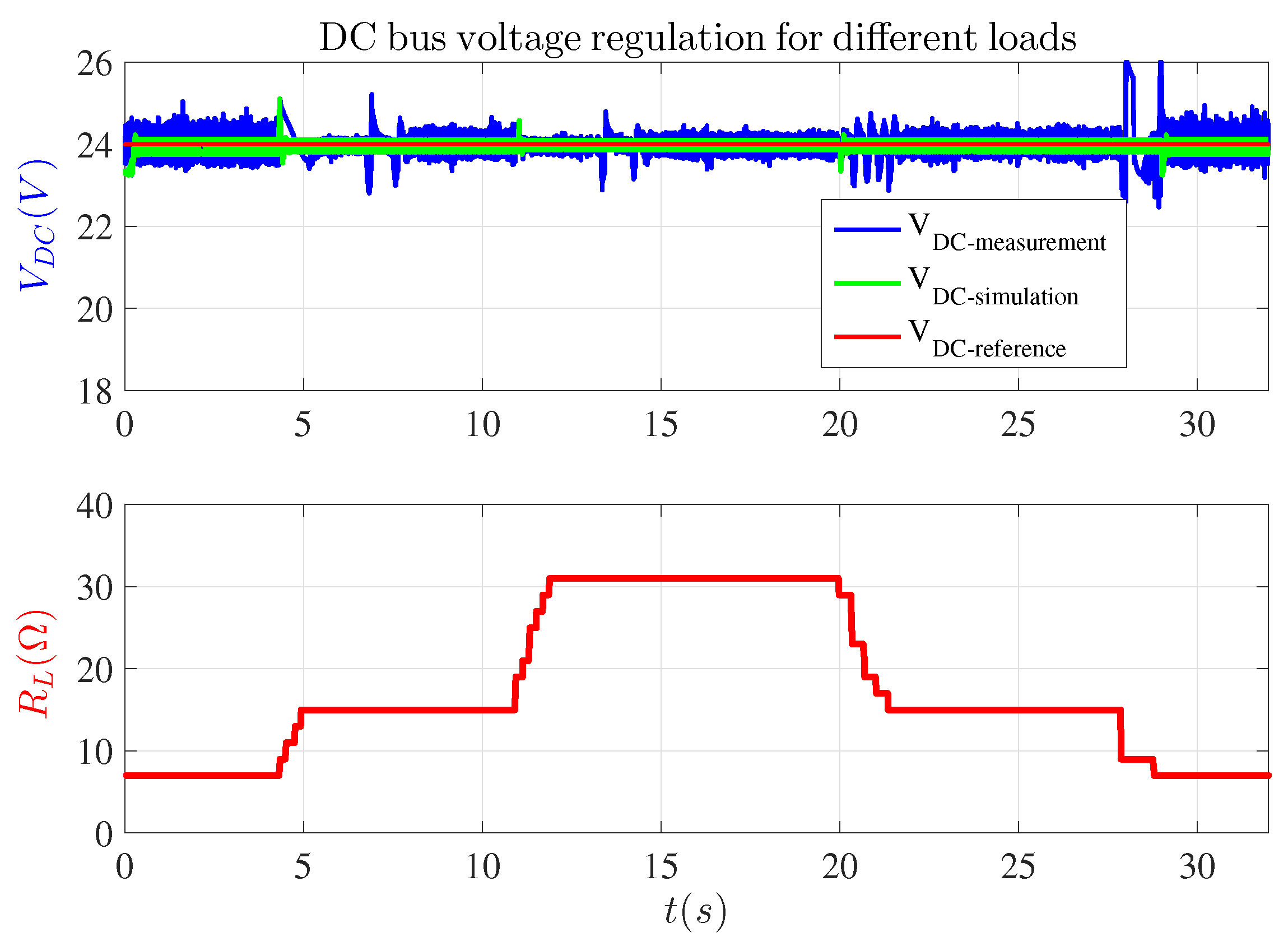
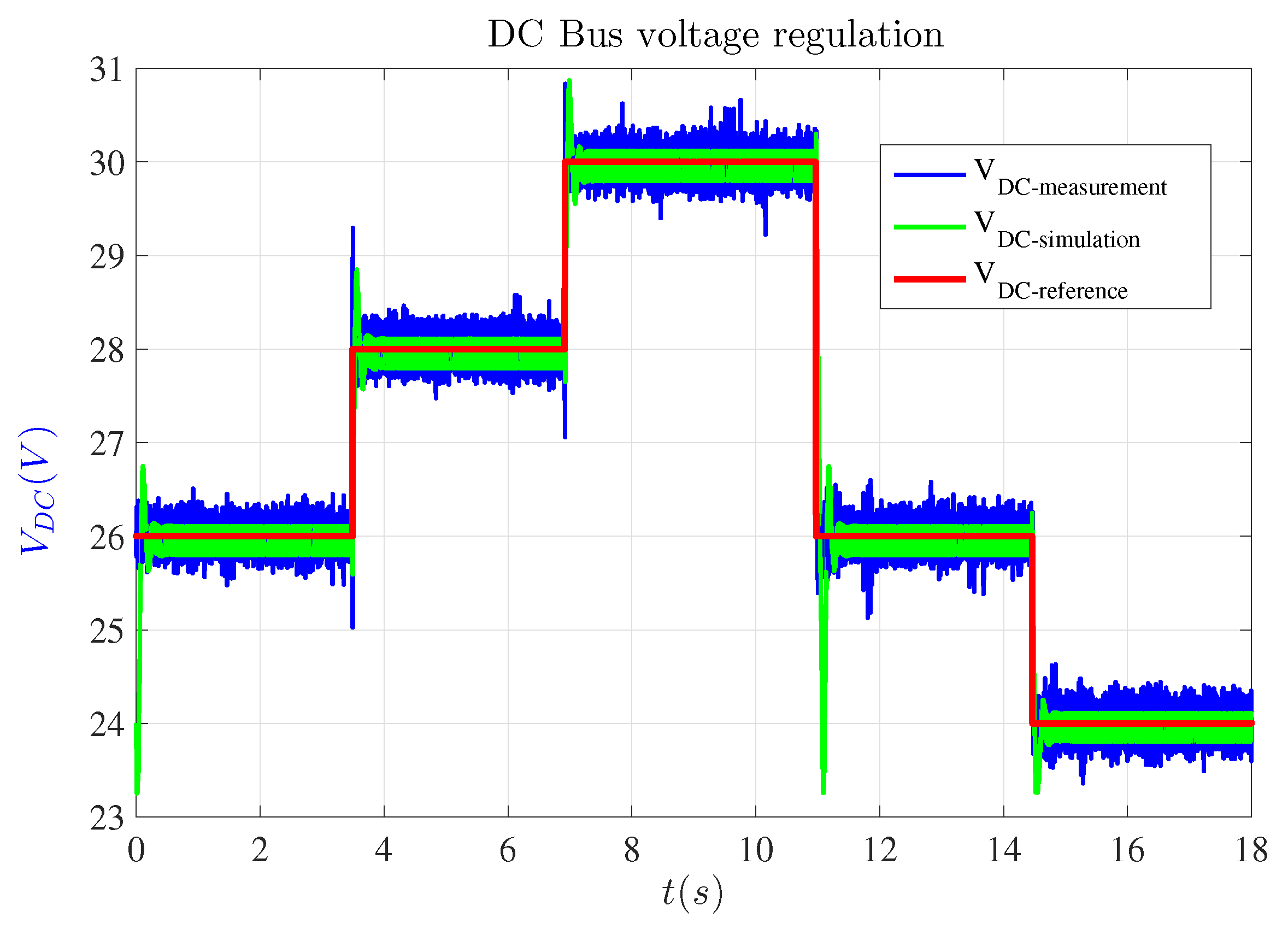
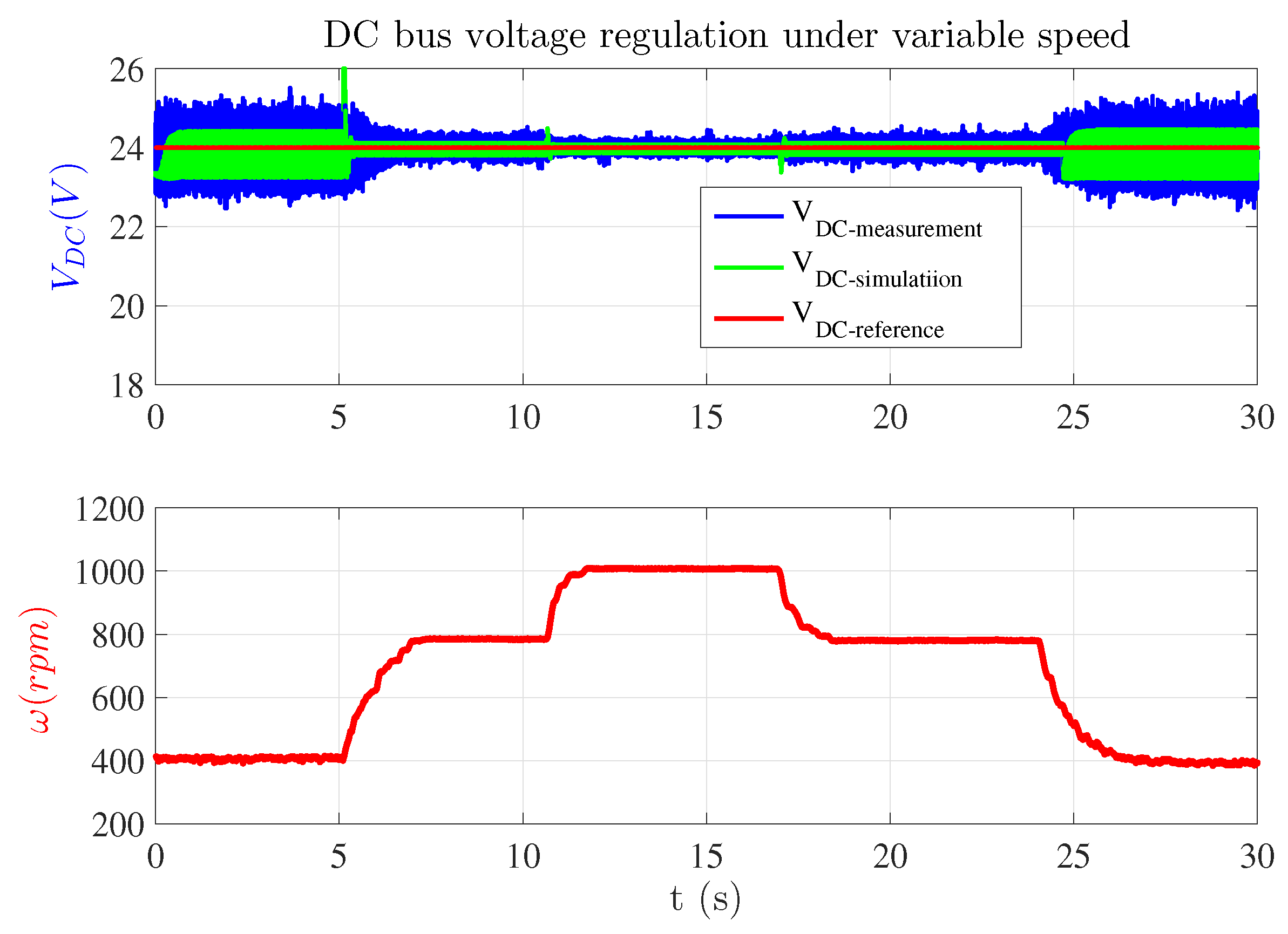
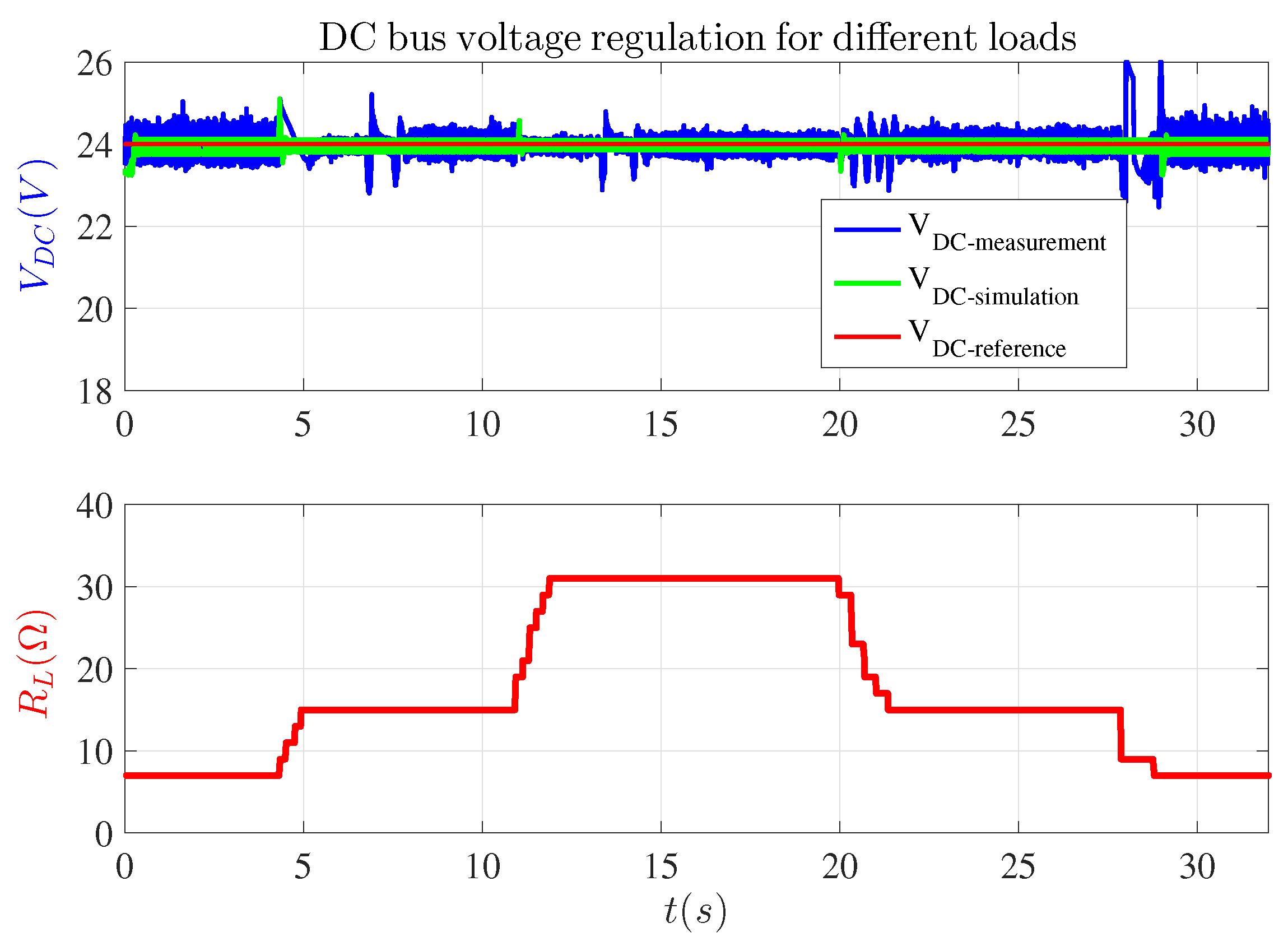
4.2. Simulation and Experimental Results
4.3. Power Conversion Characteristics and Efficiency Measurements: Experimental Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Sechilariu, M.; Locment, F. Urban DC Microgrid; Elsevier, Butterworth-Heinemann: Oxford, UK, 2016. [Google Scholar]
- Anwar, M.; Husain, I. Radial force calculation and acoustic noise prediction in switched reluctance machine. IEEE Trans. Ind. Appl. 2000, 36, 1586–1597. [Google Scholar]
- Li, S.; Zhang, S.; Habetler, T.G.; Harley, R.G. Modeling, Design Optimization, and Applications of Switched Reluctance Machines—A Review. IEEE Trans. Ind. Appl. 2019, 55, 2660–2681. [Google Scholar] [CrossRef]
- Radimov, N.; Ben-Hail, N.; Rabinovici, R. Switched Reluctance Machines as Three-Phase AC Autonomous Generator. IEEE Trans Magn. 2006, 42, 3760–3764. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Perez, M.; Clare, J.; Asher, G.; Wheeler, P. Control of a switched reluctance generator for variable-speed wind energy applications. IEEE Trans. Energy Convers. 2005, 20, 781–791. [Google Scholar] [CrossRef]
- Yahia, H.; Liouane, N.; Dhifaoui, R. Differential evolution method-based output power optimisation of switched reluctance generator for wind turbine applications. IET Renew. Power Gener. 2014, 8, 795–806. [Google Scholar] [CrossRef]
- Liu, X.; Wang, C.; Chen, Z. Characteristics Analysis of an Excitation Assistance Switched Reluctance Wind Power Generator. IEEE Trans Magn. 2015, 51, 1–4. [Google Scholar]
- Barros, T.A.S.; Ruppert Filho, E. Direct Power Control for Switched Reluctance Generator in Wind Energy. IEEE Lat. Am. Trans. 2015, 13, 123–128. [Google Scholar] [CrossRef] [Green Version]
- Barros, T.A.; Neto, P.J.; Filho, P.S.; Moreira, A.B.; Ruppert, E. Approach for performance optimization of switched reluctance generator in variable-speed wind generation system. Renew. Energy 2016, 97, 114–128. [Google Scholar] [CrossRef]
- Wang, D.; Shao, C.; Wang, X.; Zhang, C. Performance Characteristics and Preliminary Analysis of Low Cost Tubular Linear Switch Reluctance Generator for Direct Drive WEC. IEEE Trans. Appl. Supercond. 2016, 26, 1–5. [Google Scholar] [CrossRef]
- Neto, P.J.S.; Barros, T.A.S.; De Paula, M.V.; de Souza, R.R.; Filho, E.R. Design of Computational Experiment for Performance Optimization of a Switched Reluctance Generator in Wind Systems. IEEE Trans. Energy Convers. 2018, 33, 406–419. [Google Scholar] [CrossRef]
- Schofield, N.; Long, S. Generator Operation of a Switched Reluctance Starter/Generator at Extended Speeds. IEEE Trans. Veh. Technol. 2009, 58, 48–56. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.; Parsa, L.; Dorrell, D. Automotive Electric Propulsion Systems With Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Hu, Y.; Song, X.; Cao, W.; Ji, B. New SR Drive with Integrated Charging Capacity for Plug-In Hybrid Electric Vehicles (PHEVs). IEEE Trans. Ind. Electron. 2014, 61, 5722–5731. [Google Scholar] [CrossRef] [Green Version]
- Han, S.; Cui, S.; Song, L.; Chan, C.C. Electromagnetic Analysis and Design of Switched Reluctance Double-Rotor Machine for Hybrid Electric Vehicles. Energies 2014, 7, 6665–6688. [Google Scholar] [CrossRef] [Green Version]
- Urase, K.; Yabu, N.; Kiyota, K.; Sugimoto, H.; Chiba, A.; Takemoto, M.; Ogasawara, S.; Hoshi, N. Energy Efficiency of SR and IPM Generators for Hybrid Electric Vehicle. IEEE Trans. Ind. Appl. 2015, 51, 2874–2883. [Google Scholar] [CrossRef]
- Valdivia, V.; Todd, R.; Bryan, F.J.; Barrado, A.; Lzaro, A.; Forsyth, A.J. Behavioral Modeling of a Switched Reluctance Generator for Aircraft Power Systems. IEEE Trans. Ind. Electron. 2014, 61, 2690–2699. [Google Scholar] [CrossRef]
- Bartolo, B.; Degano, M.; Espina, J.; Gerada, C. Design and Initial Testing of a High-Speed 45-kW Switched Reluctance Drive for Aerospace Application. IEEE Trans. Ind. Electron. 2014, 64, 988–997. [Google Scholar] [CrossRef]
- Tursini, M.; Villani, M.; Fabri, G.; Di Leonardo, L. A switched-reluctance motor for aerospace application: Design, analysis and results. Electr. Power Syst. Res. 2017, 112, 74–83. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Perez, M.; Clare, J.; Asher, G.; Wheeler, P. Power Smoothing Using a Flywheel Driven by a Switched Reluctance Machine. IEEE Trans. Ind. Electron. 2006, 53, 1086–1093. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, H.; Cheng, H.; Yan, S.; Abbas, S. An Active Boost Power Converter for Improving the Performance of Switched Reluctance Generators in DC Generating Systems. IEEE Trans. Power Electron. 2020, 35, 4741–4755. [Google Scholar] [CrossRef]
- Wang, B.; Wang, Y.; Xu, Y.; Zhang, X.; Gooi, H.B.; Ukil, A.; Tan, X. Consensus-based Control of Hybrid Energy Storage System with a Cascaded Multiport Converter in DC Microgrids. IEEE Trans. Sustain. Energy 2019, 1. [Google Scholar] [CrossRef]
- Hu, K.W.; Wang, J.C.; Lin, T.S.; Liaw, C.M. A Switched-Reluctance Generator with Interleaved Interface DC-DC Converter. IEEE Trans. Energy Convers. 2015, 30, 273–284. [Google Scholar] [CrossRef]
- Chang, Y.; Liaw, C. On the Design of Power Circuit and Control Scheme for Switched Reluctance Generator. IEEE Trans. Power Electron. 2008, 23, 445–454. [Google Scholar] [CrossRef]
- Mendes, R.; Calado, M.R.; Mariano, S. Maximum Power Point Tracking for a Point Absorber Device with a Tubular Linear Switched Reluctance Generator. Energies 2018, 11, 2192. [Google Scholar] [CrossRef] [Green Version]
- Dos Reis, L.; Coelho, A.; Almeida, O.; Campos, J. Modeling and controller performance assessment for a switched reluctance motor drive based on setpoint relay. ISA Trans. 2009, 48, 206–212. [Google Scholar] [CrossRef]
- Miller, T. (Ed.) Electronic Control of Switched Reluctance Machine; Newness Power Engineering Series; Reed Educational and Professional Publishing Ltd.: Glasgow, UK, 2001. [Google Scholar]
- Torrey, D.A. SRG and their control. IEEE Trans. Ind. Electron. 2002, 49, 3–14. [Google Scholar] [CrossRef]
- Kioskeridis, I.; Mademlis, C. Optimal efficiency control of switched reluctance generators. IEEE Trans. Power Electron. 2006, 21, 1062–1071. [Google Scholar] [CrossRef]
- Labiod, C.; Srairi, K.; Mahdad, B.; Benchouia, M.T.; Benbouzid, M. Speed Control of 8/6 Switched Reluctance Motor with Torque Ripple Reduction Taking into Account Magnetic Saturation Effects. Energy Procedia 2016, 74, 112–121. [Google Scholar] [CrossRef] [Green Version]
- Hannoun, H.; Hilairet, M.; Marchand, C. Design of an SRM Speed Control Strategy for a Wide Range of Operating Speeds. IEEE Trans. Ind. Electron. 2010, 57, 2911–2921. [Google Scholar] [CrossRef] [Green Version]
- Viajante, G. A grid connection scheme of a SRG for active power injection. In Proceedings of the Electric Machines and Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013. [Google Scholar]
- Yu, G.; Ma, L.; Cheng, H.; Chen, H.; Yingjie, H. Research on the control strategy SRG system. In Proceedings of the International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014. [Google Scholar]
- Mese, E.; Sozer, Y.; Kokernak, J.M.; Torrey, D.A. Optimal excitation of a high speed SRG. In Proceedings of the Fifteenth Annual IEEE Applied Power Electronics Conference and Exposition (APEC 2000), New Orleans, LA, USA, 6–10 February 2000. [Google Scholar]
- Liang, X.; Li, G.; Ojeda, J.; Gabsi, M.; Ren, Z. Comparative Study of Classical and Mutually Coupled Switched Reluctance Motors Using Multiphysics Finite-Element Modelling. IEEE Trans. Ind. Electron. 2014, 61, 5066–5074. [Google Scholar] [CrossRef]
- Mesbes, M.; Multon, B. MRVSim code: Logiciel de simulation pour l’aide au dimensionnement des MRVDS et de convertisseur. IDDN.FR 2008. 001.430010.000.S.C.2004.000.30645. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Number of stator poles | 8 | – | |
| Number of rotor poles | 6 | – | |
| Number of phases | q | 4 | – |
| Nominal power | 1200 | W | |
| Nominal speed | 3000 | rpm | |
| Nominal torque | Nm | ||
| Maximal current | 100 | A | |
| Inertia factor | J | kg·m | |
| Friction coefficient | F | Nm/rad s | |
| Windings resistance | r |
| Voltage | Simulation | Measurement |
|---|---|---|
| V | ||
| V | ||
| V | ||
| V |
| Speed | Simulation | Measurement |
|---|---|---|
| rpm | ||
| rpm | ||
| rpm |
| Load Resistance | Simulation | Measurement |
|---|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarr, A.; Bahri, I.; Berthelot, E.; Kebe, A.; Diallo, D. Switched Reluctance Generator for Low Voltage DC Microgrid Operation: Experimental Validation. Energies 2020, 13, 3032. https://doi.org/10.3390/en13123032
Sarr A, Bahri I, Berthelot E, Kebe A, Diallo D. Switched Reluctance Generator for Low Voltage DC Microgrid Operation: Experimental Validation. Energies. 2020; 13(12):3032. https://doi.org/10.3390/en13123032
Chicago/Turabian StyleSarr, Abdoulaye, Imen Bahri, Eric Berthelot, Abdoulaye Kebe, and Demba Diallo. 2020. "Switched Reluctance Generator for Low Voltage DC Microgrid Operation: Experimental Validation" Energies 13, no. 12: 3032. https://doi.org/10.3390/en13123032
APA StyleSarr, A., Bahri, I., Berthelot, E., Kebe, A., & Diallo, D. (2020). Switched Reluctance Generator for Low Voltage DC Microgrid Operation: Experimental Validation. Energies, 13(12), 3032. https://doi.org/10.3390/en13123032