The Application of the Bispectrum Analysis to Detect the Rotor Unbalance of the Induction Motor Supplied by the Mains and Frequency Converter


Abstract
:1. Introduction
- electrical, e.g., stator winding and rotor faults, insulation faults;
- mechanical, e.g., bearing faults, eccentricity, non-alignment of shafts, rotor unbalance, transmission faults.
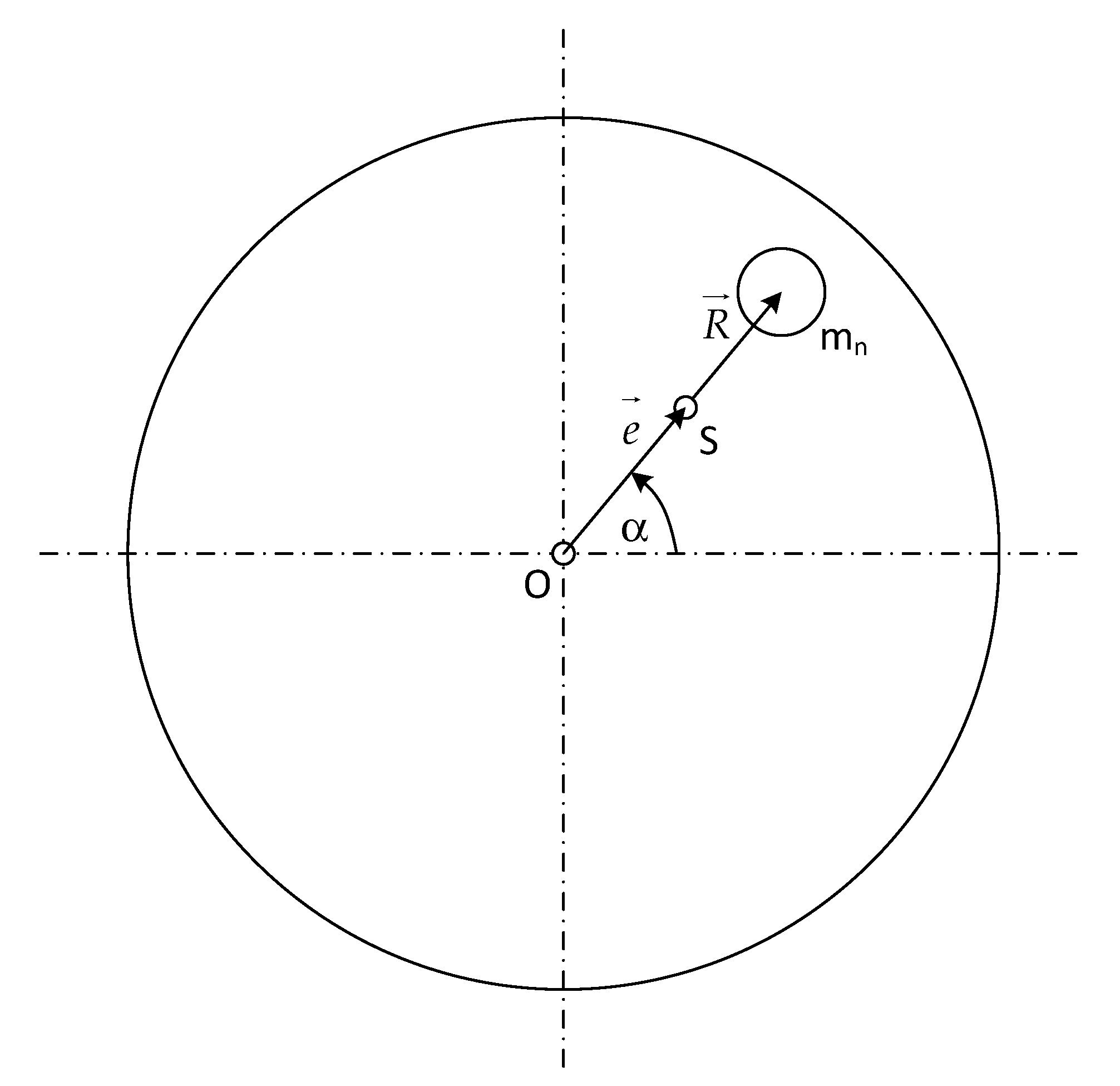
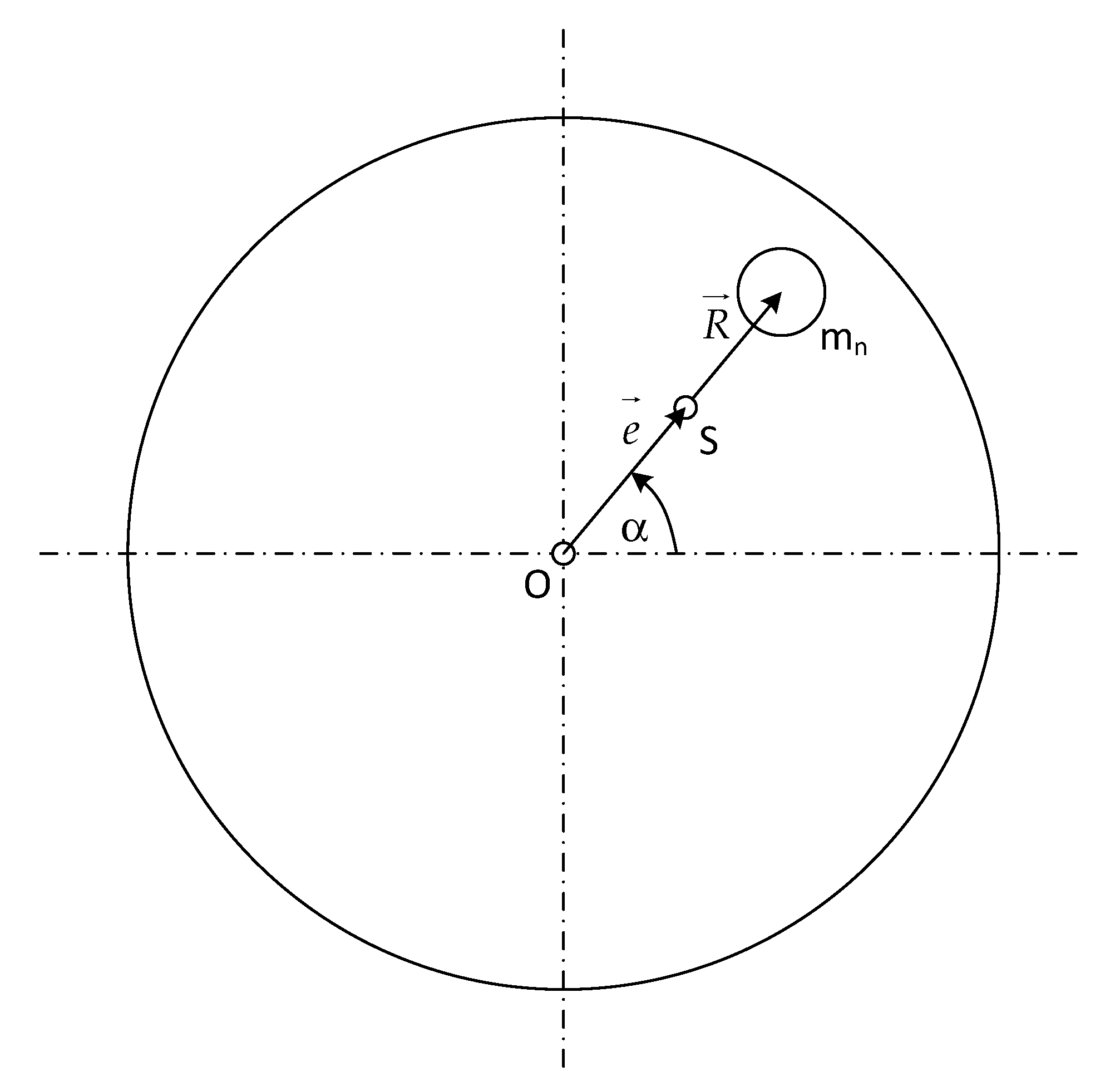
2. Rotor Unbalance and Its Symptoms
- static—the rotor axis and its main inertia axis undergo a parallel shift with regards to each other;
- quasi-static—rotor axis and its central inertia axis do not intersect at the point of the center of gravity of the rotor;
- torque—the rotor axis and its central inertia axis intersect at the point of the center of gravity of the rotor;
- dynamic—a combination of static and torque unbalance.
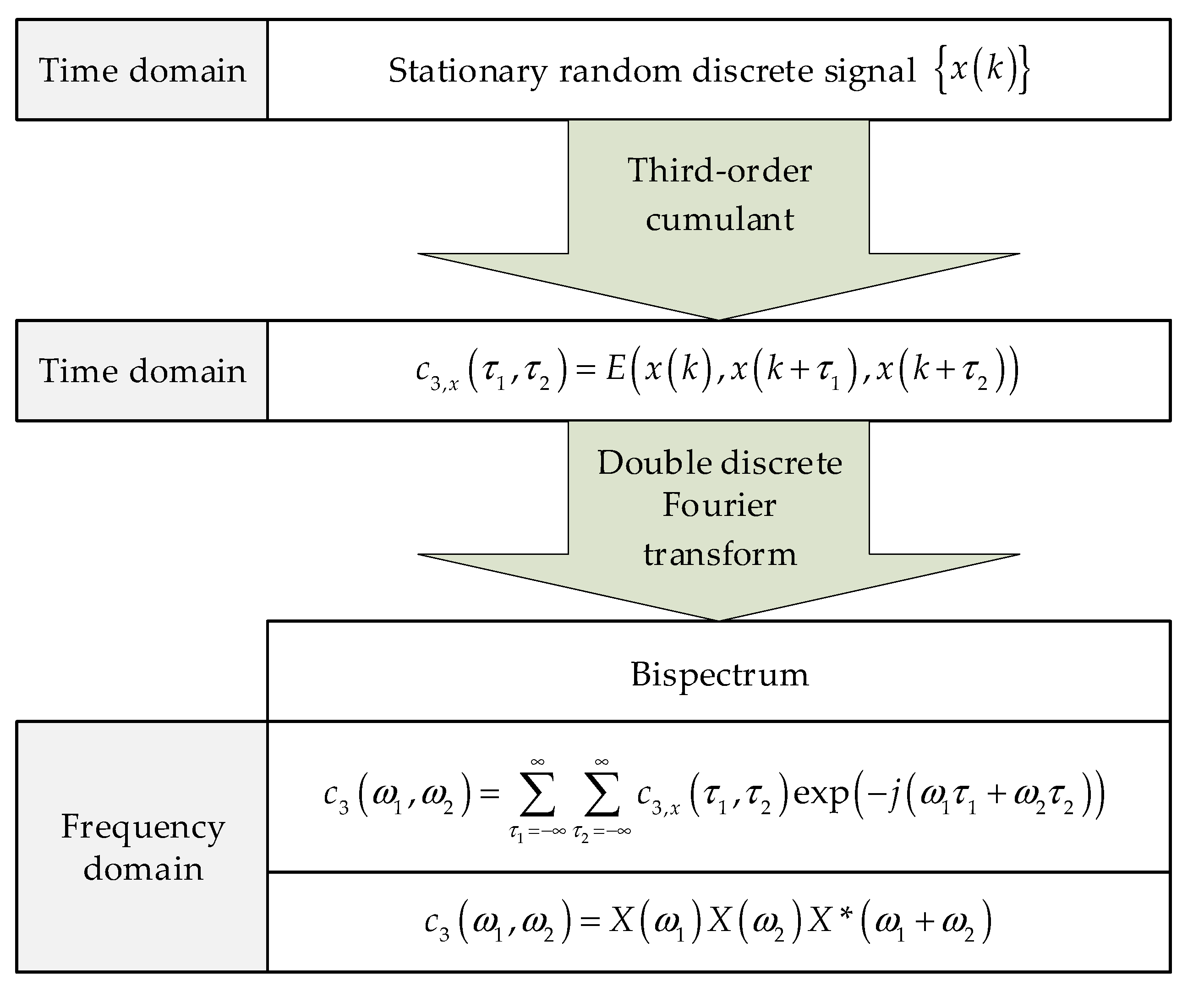
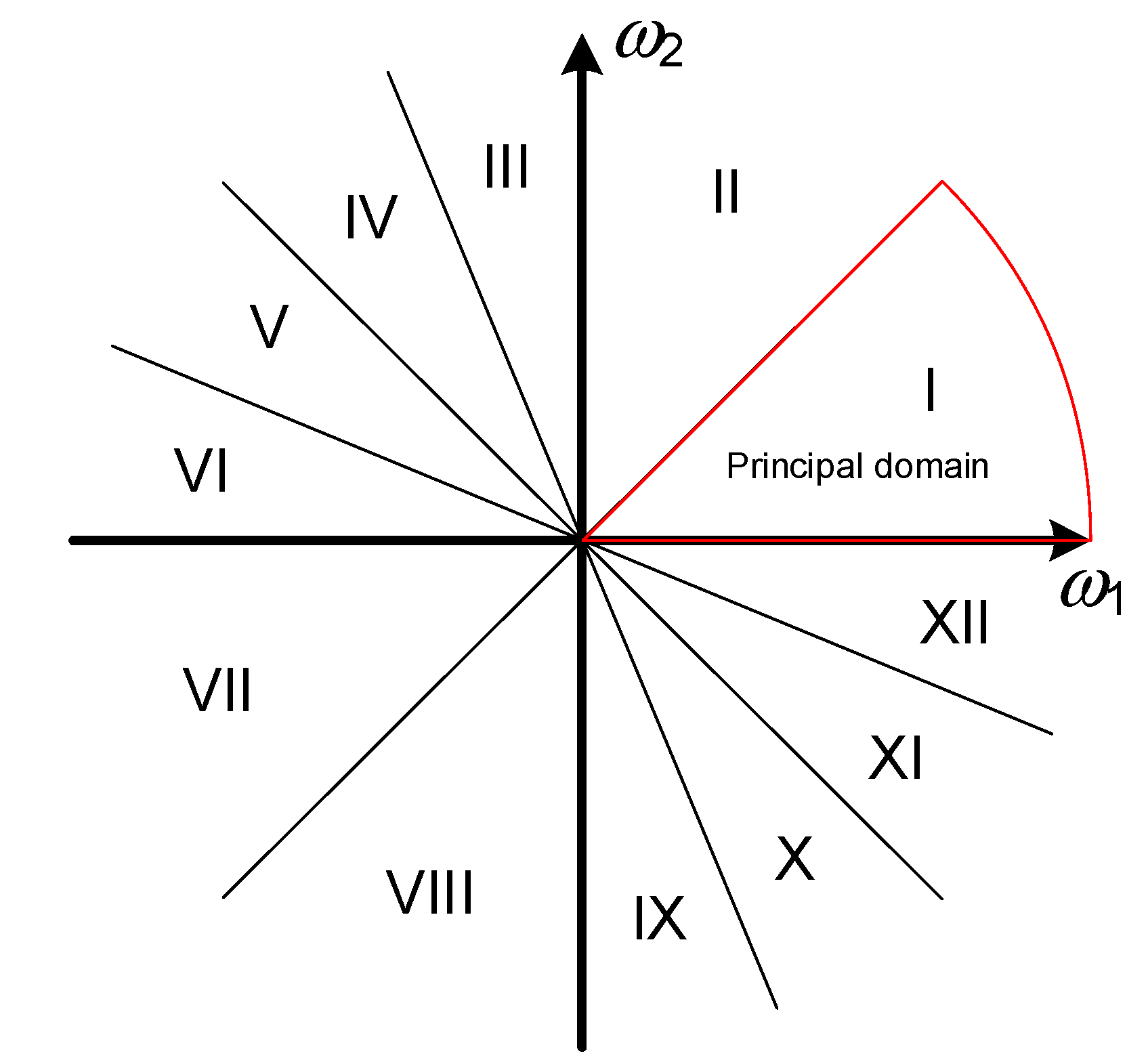
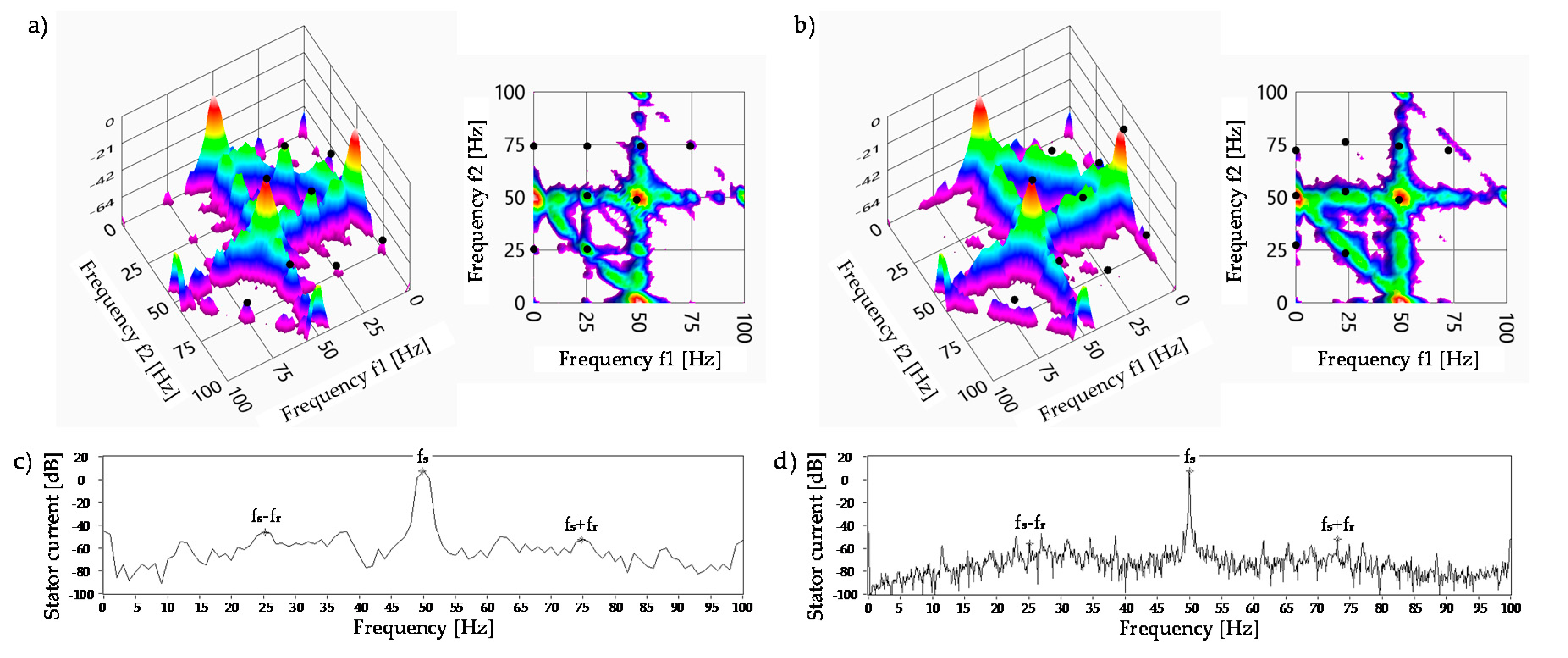
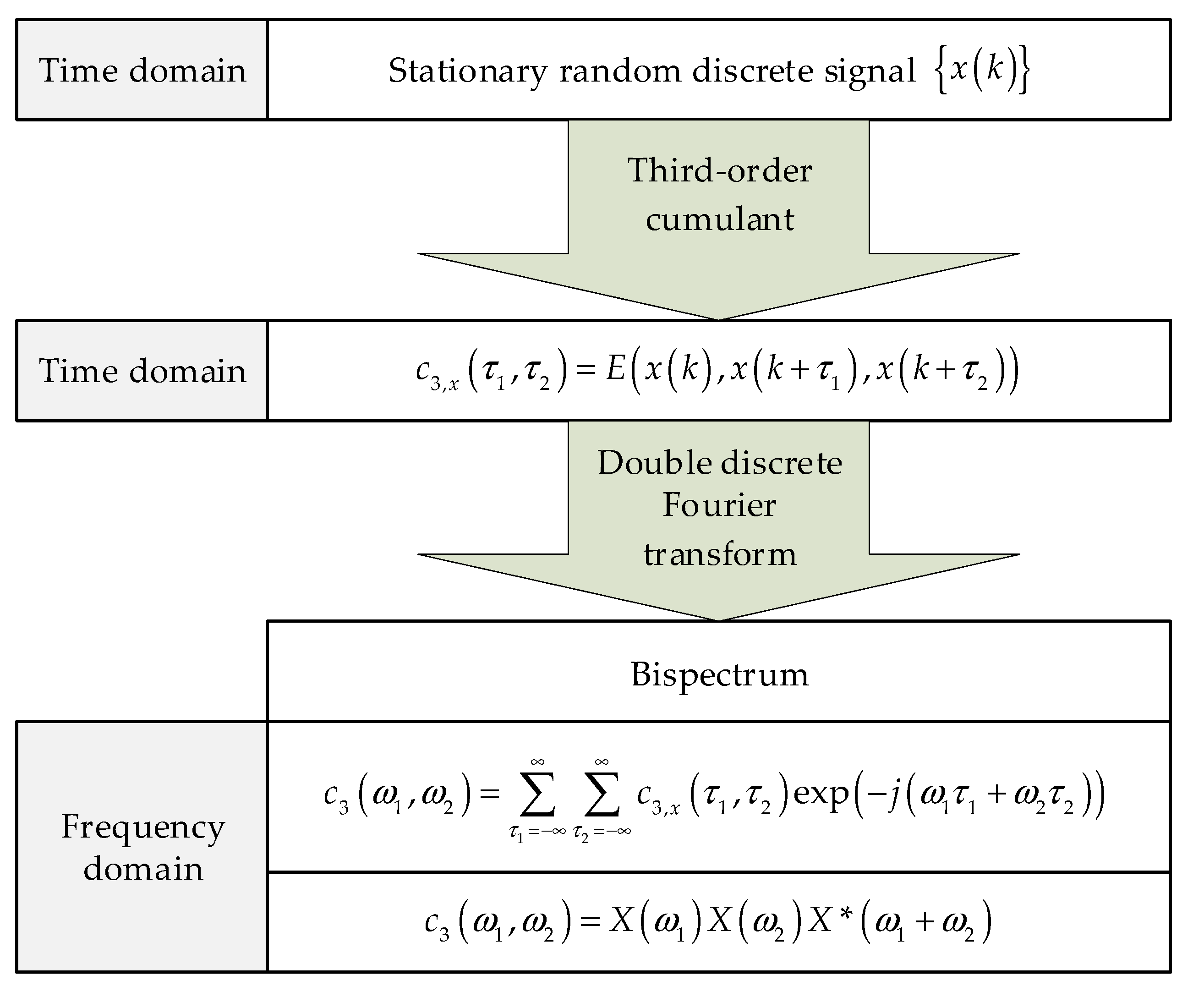
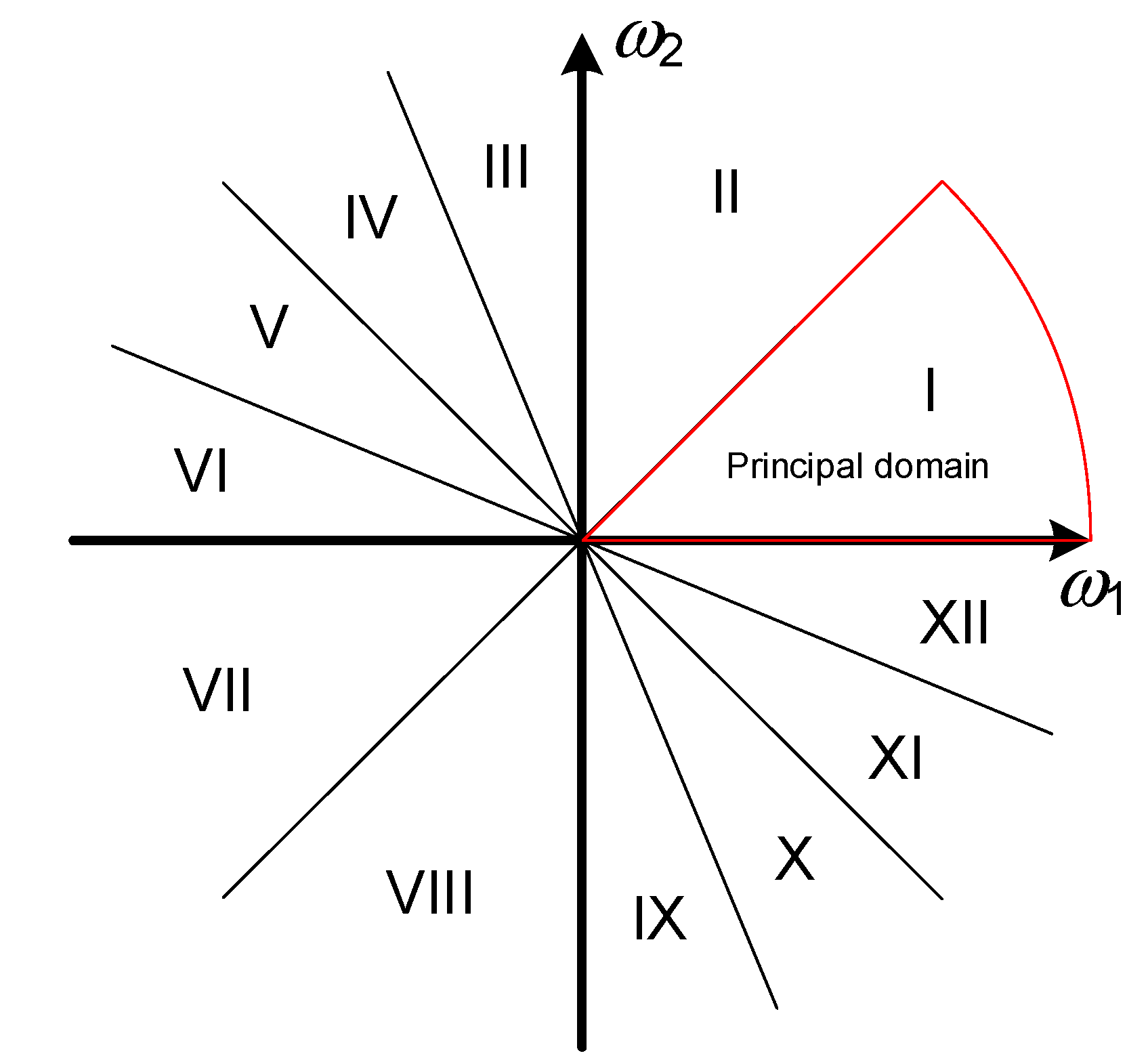
3. Bispectrum Analysis
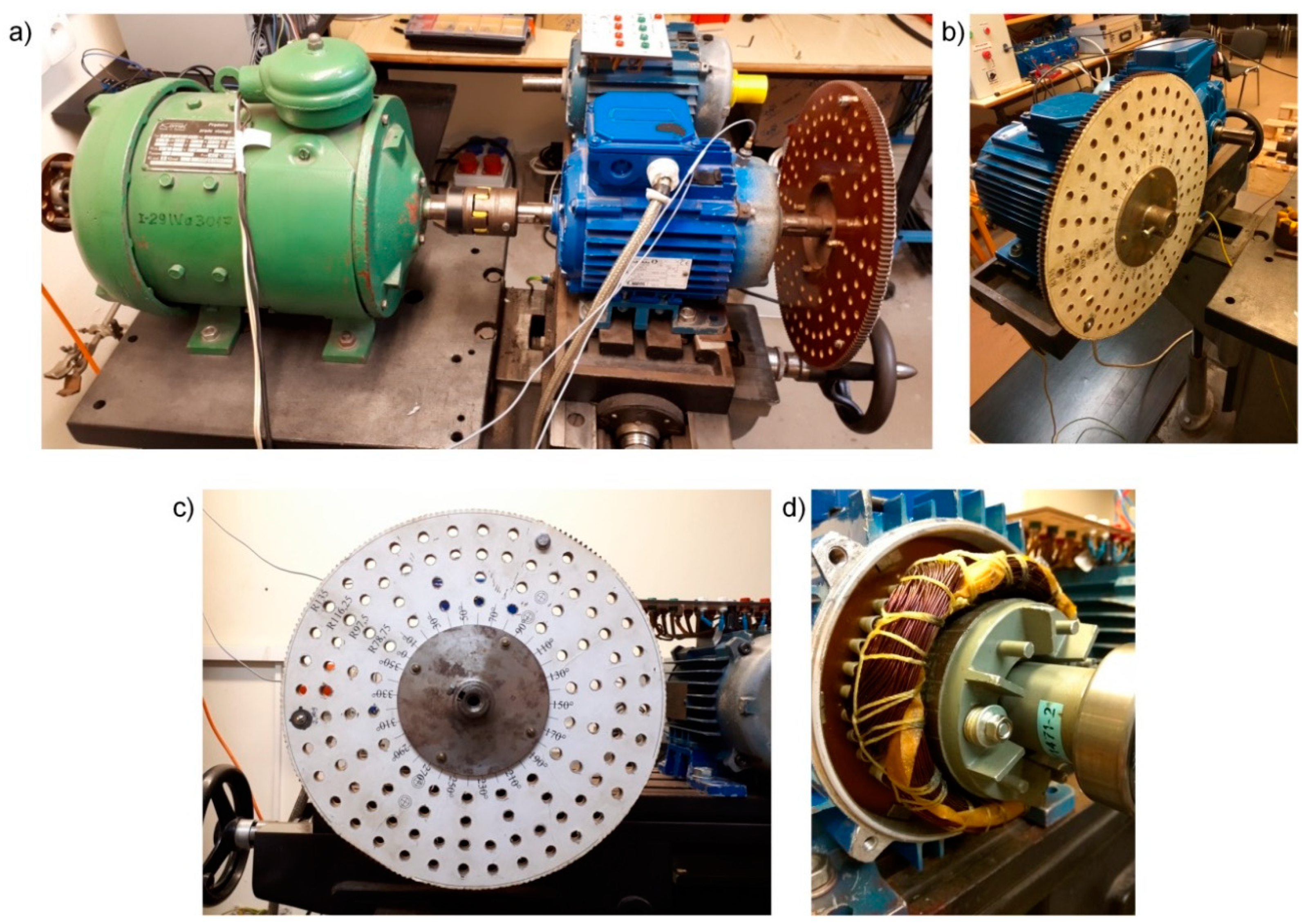
4. Research Methodology
4.1. Case No. 1:
4.2. Case No. 2:
4.3. Case No. 3:
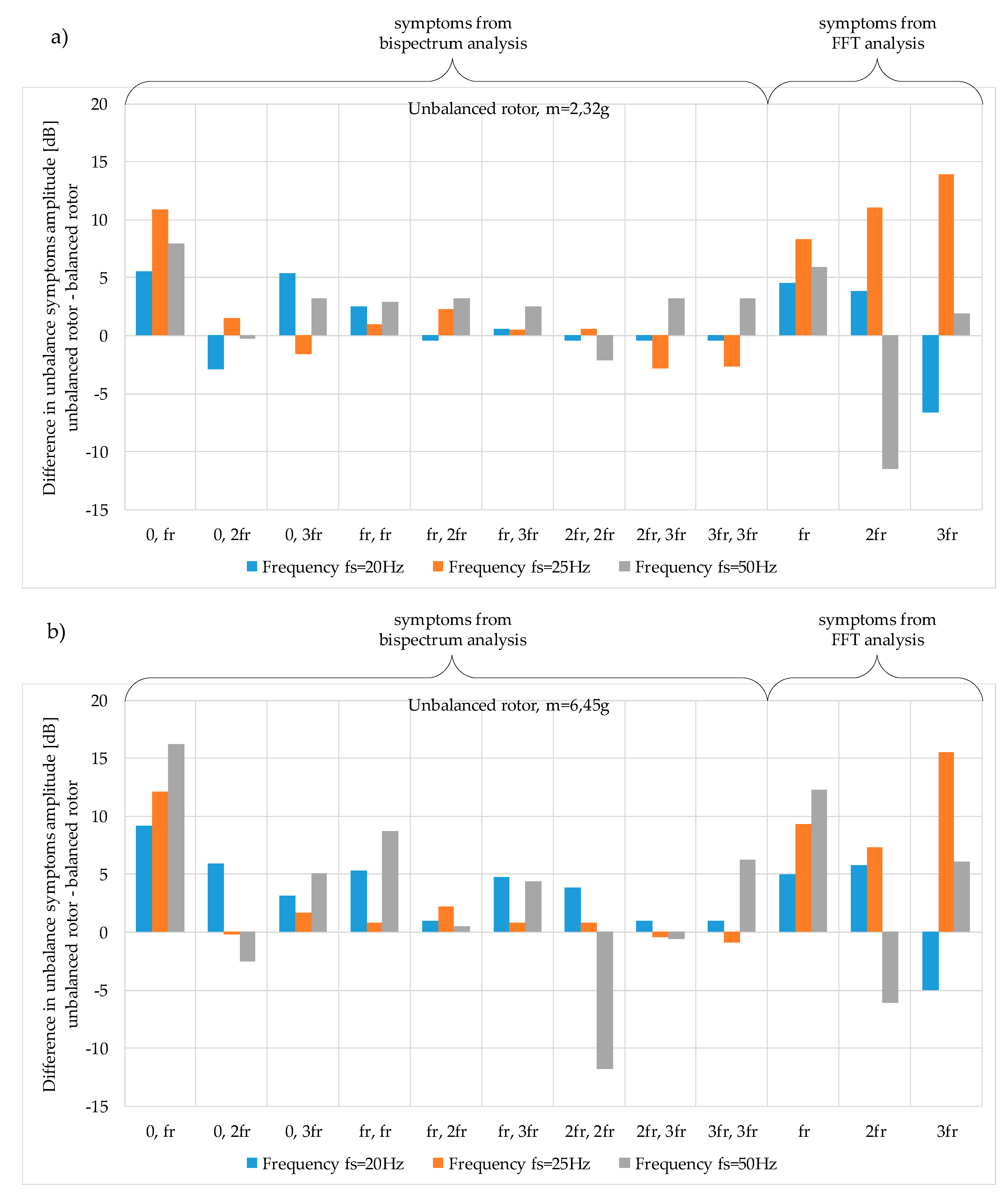
5. Research Results Analysis
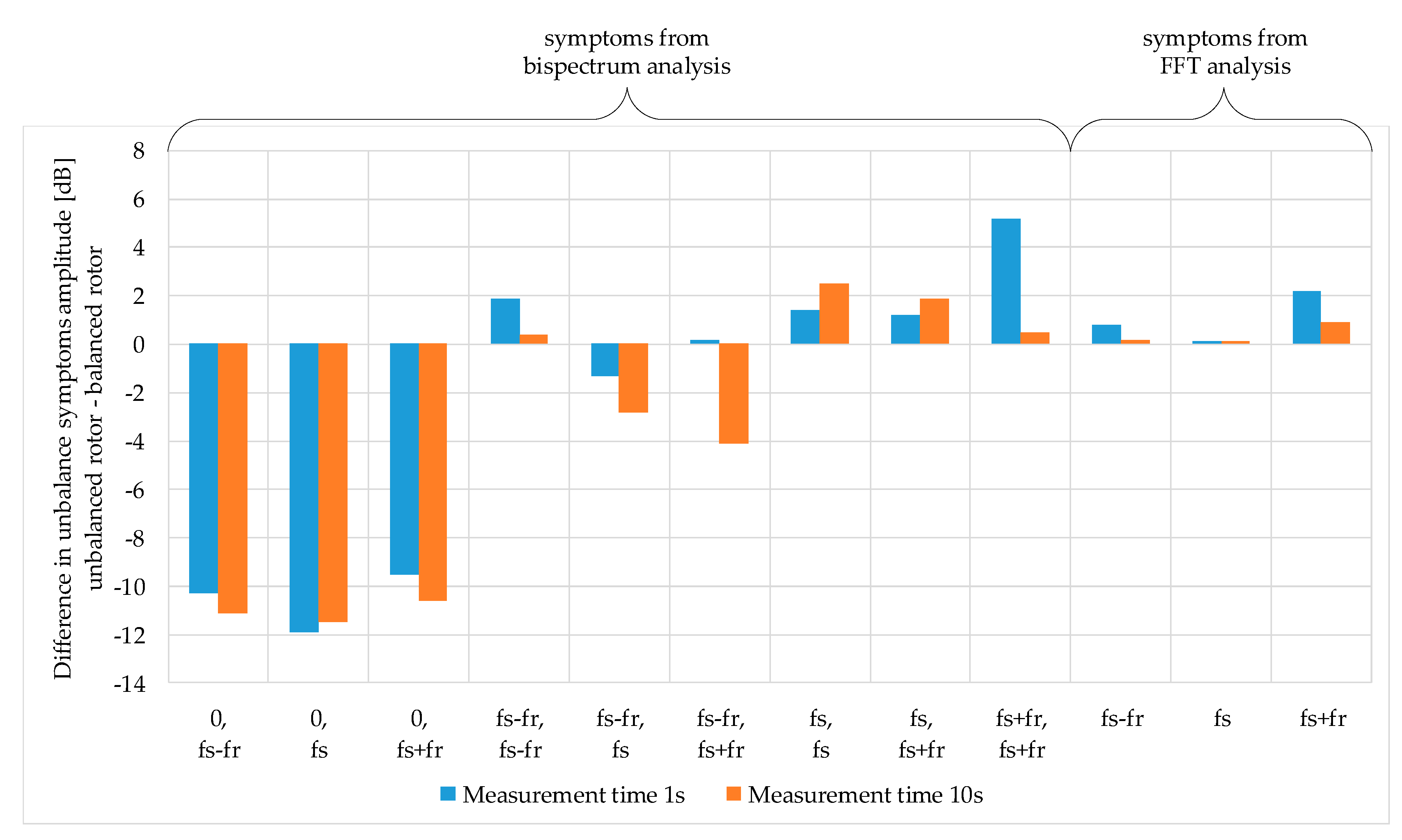
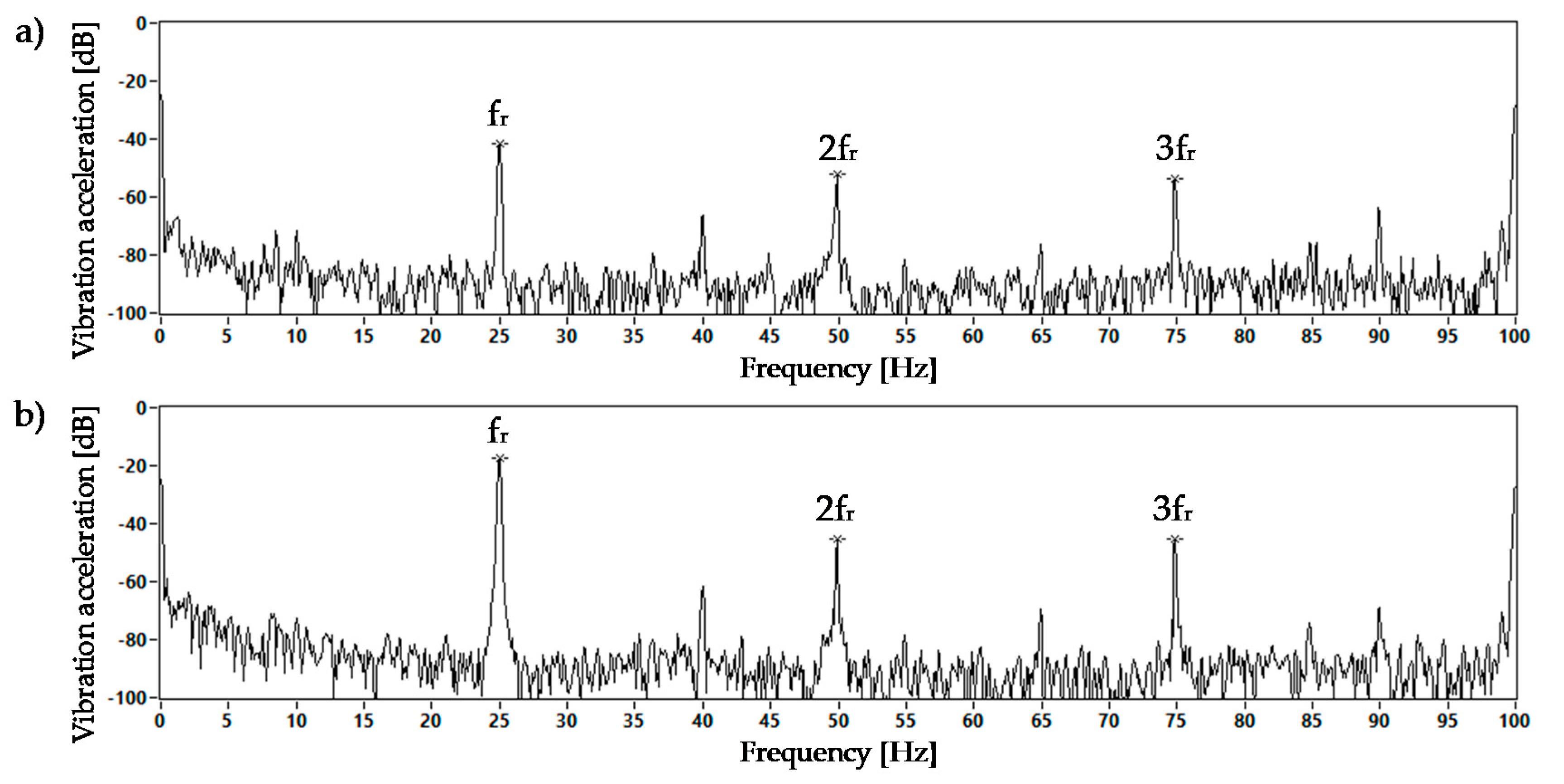
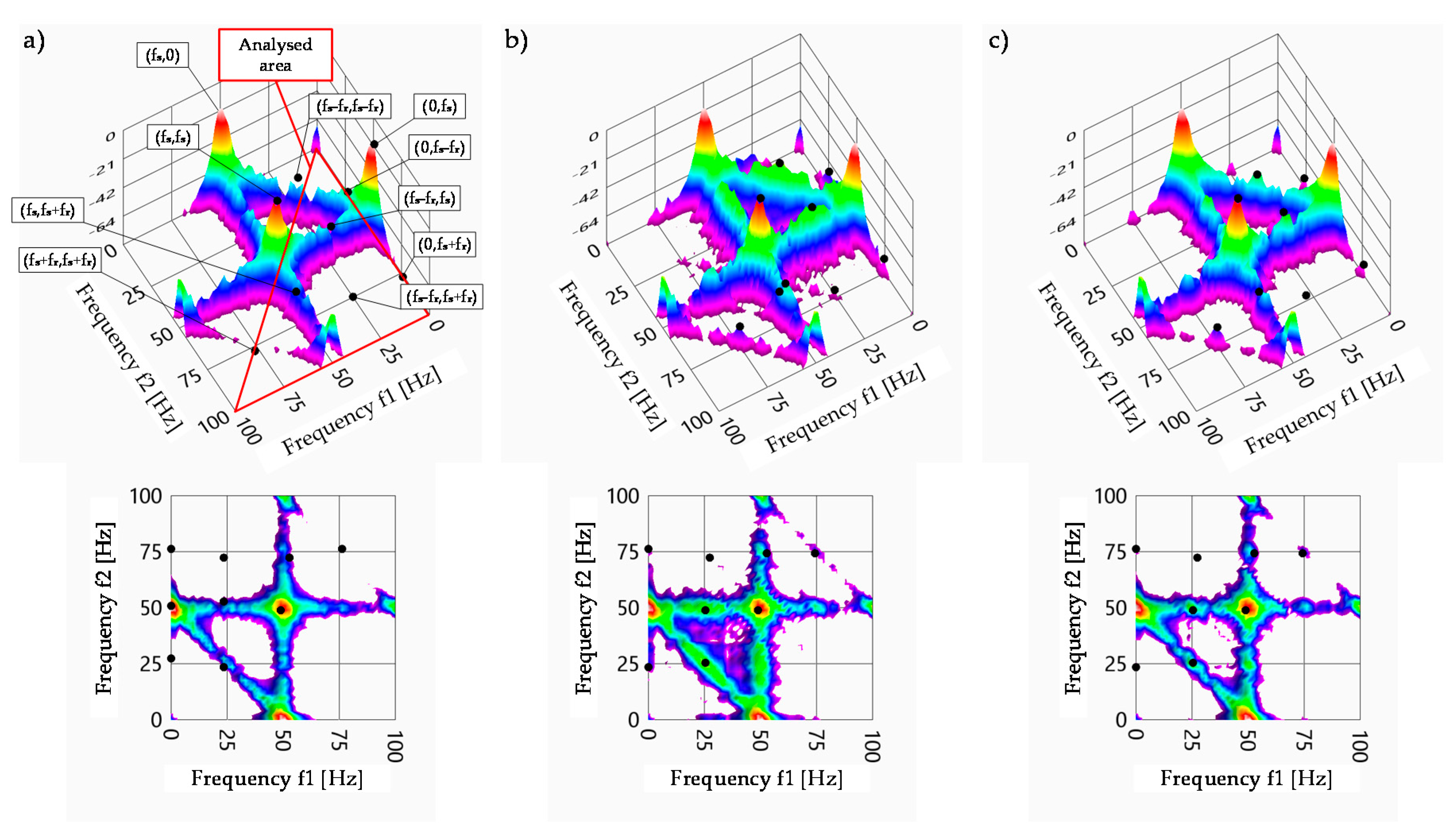
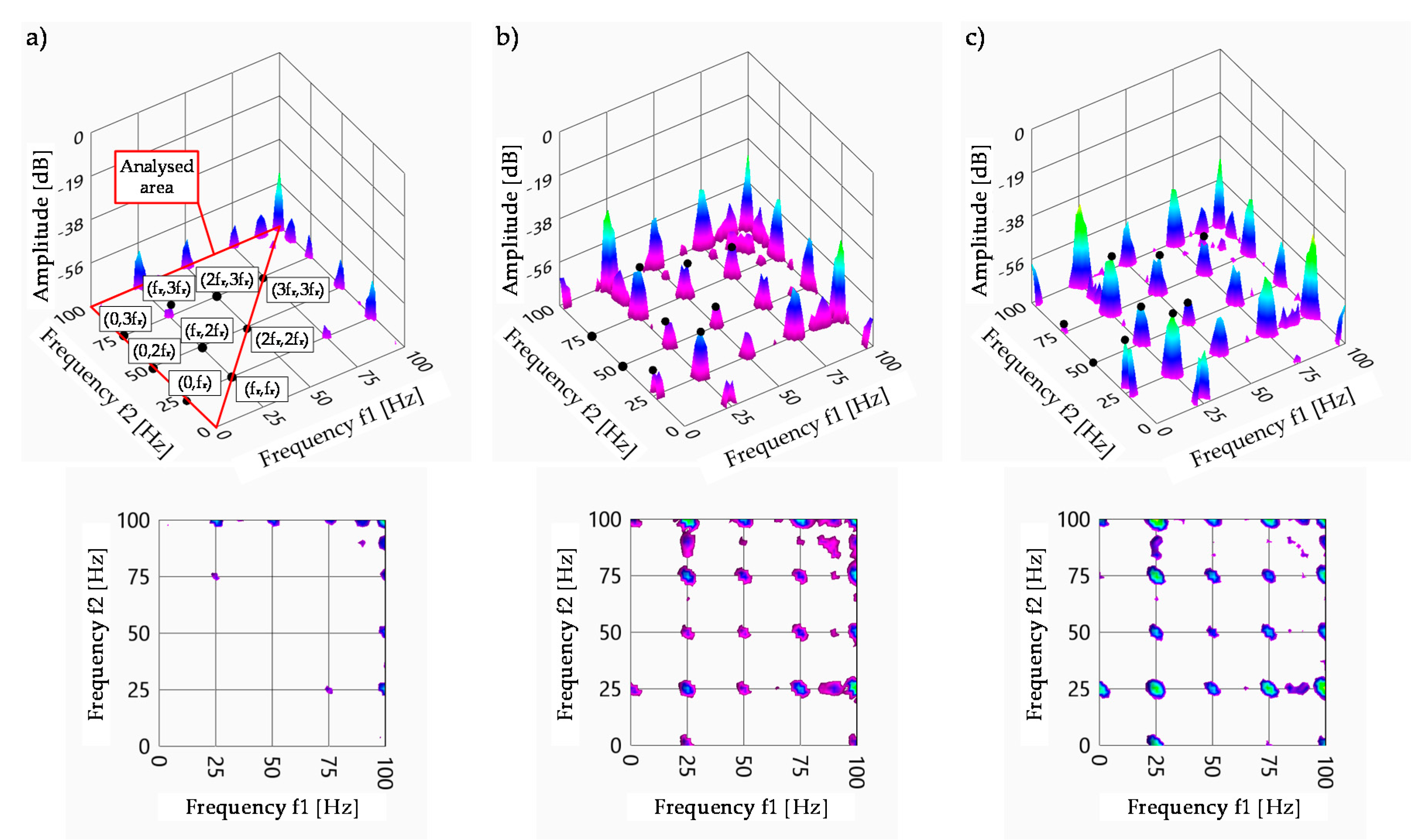
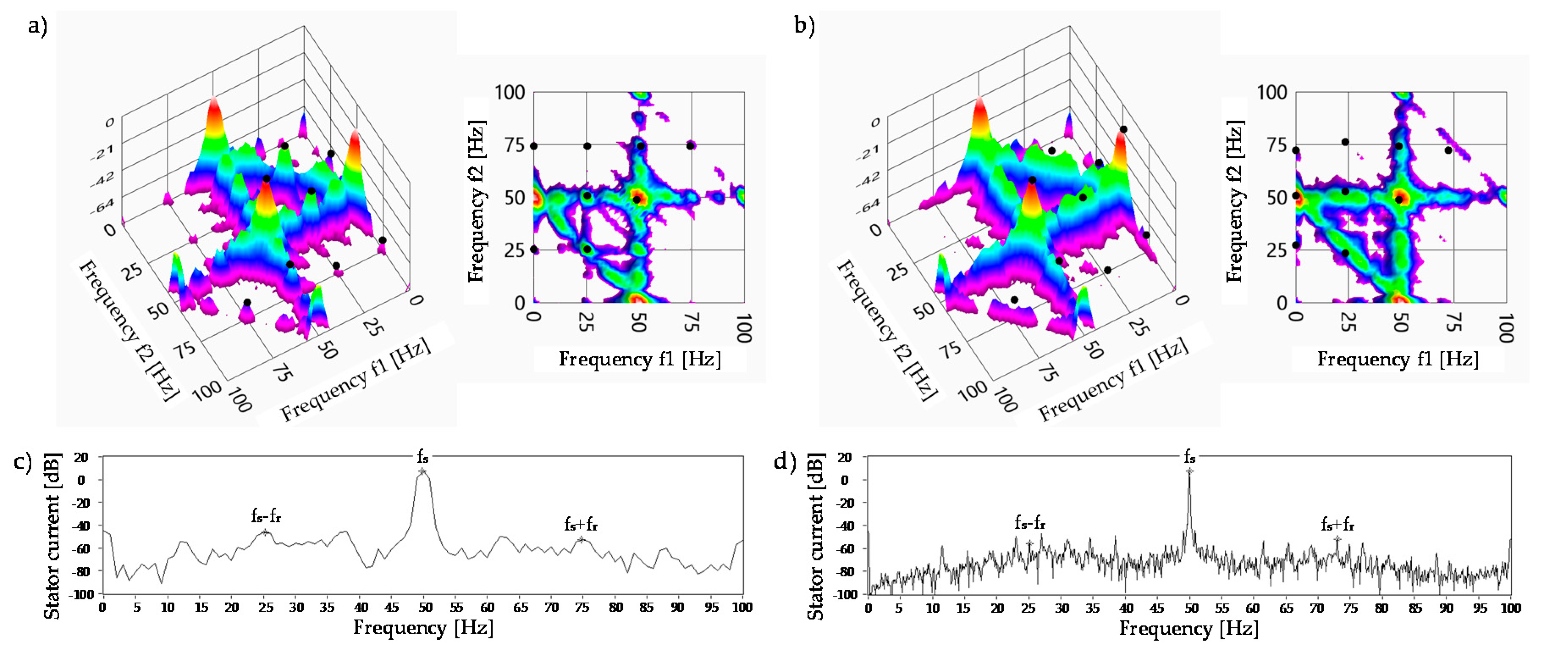
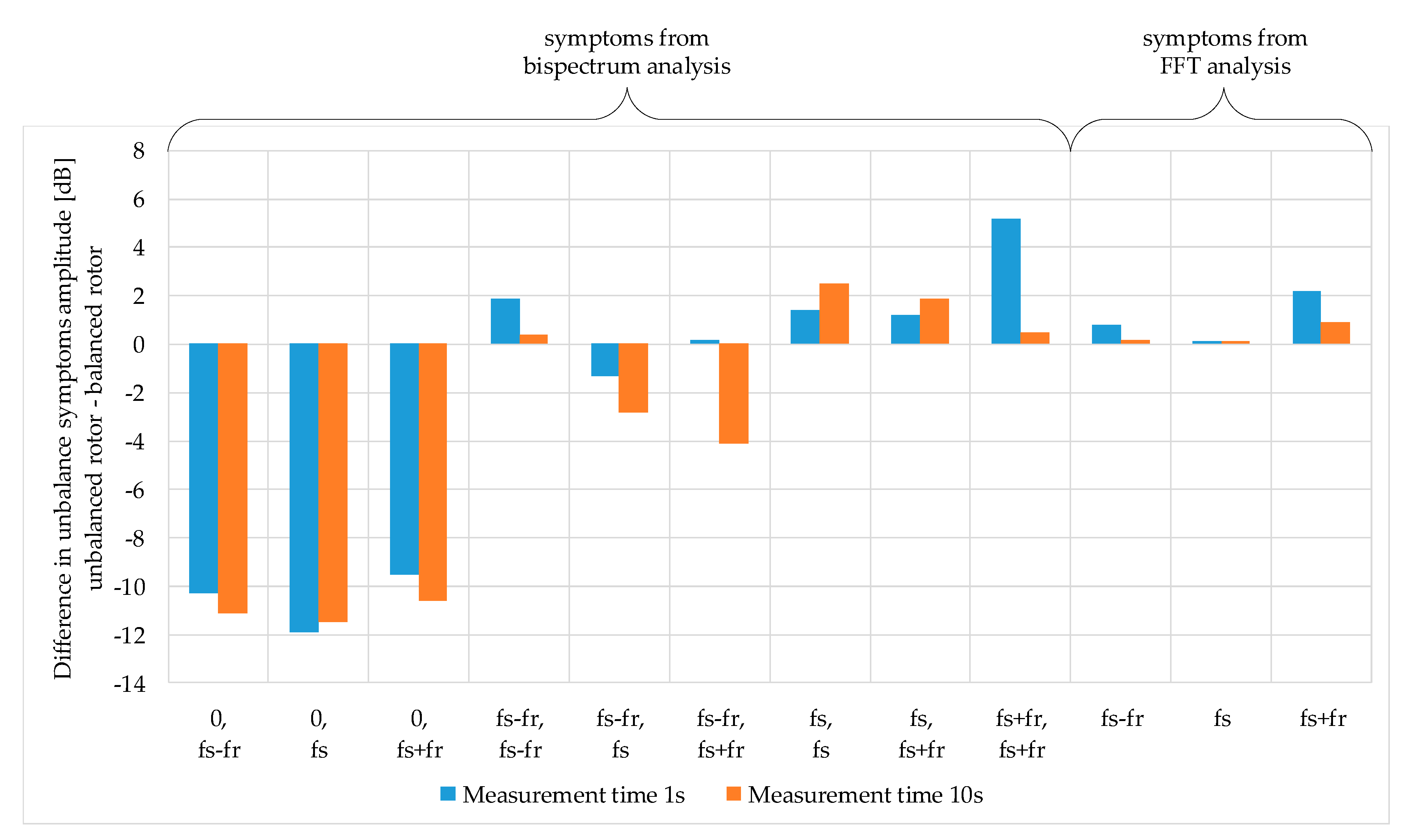
5.1. Results Analysis for Case No. 1
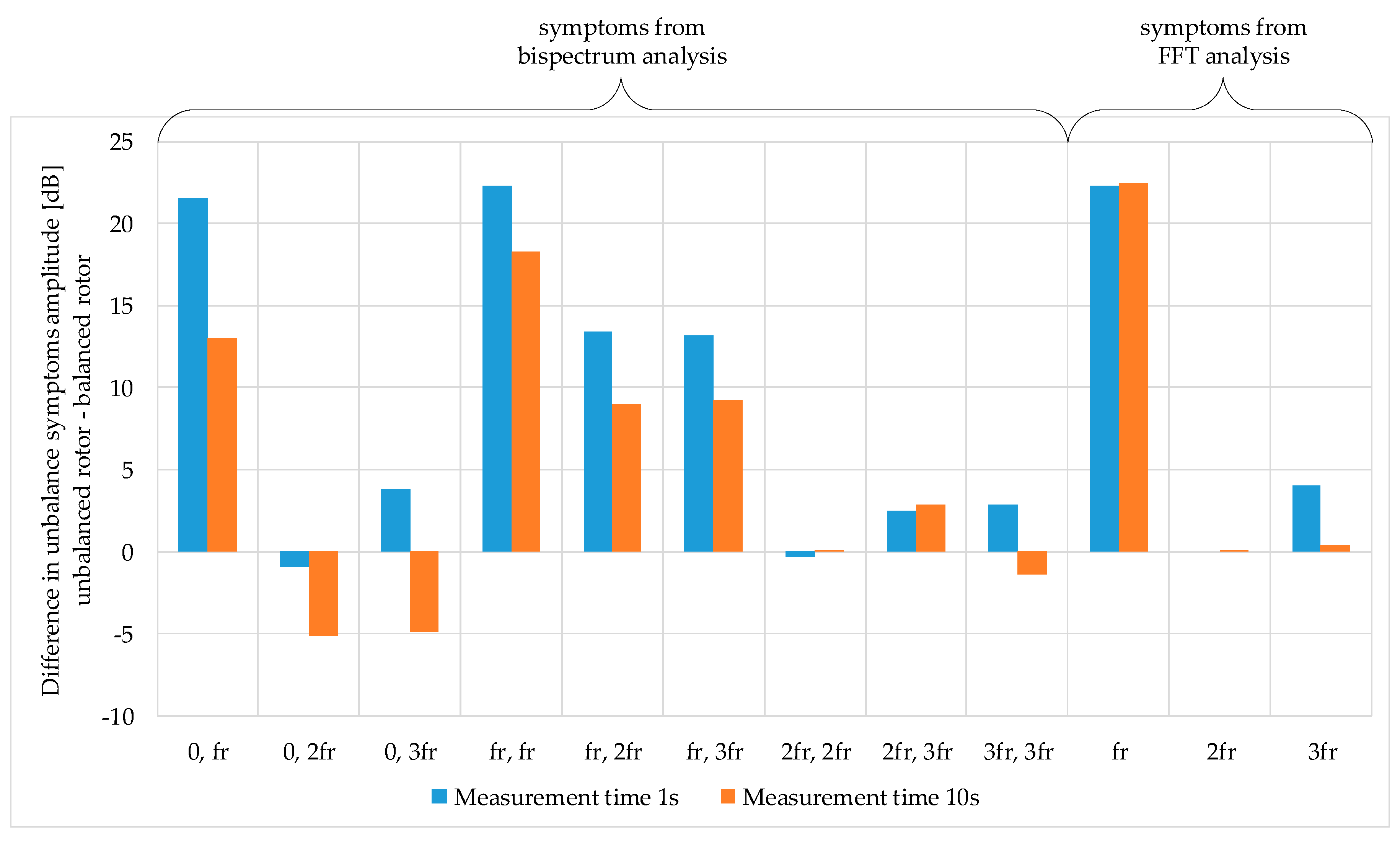
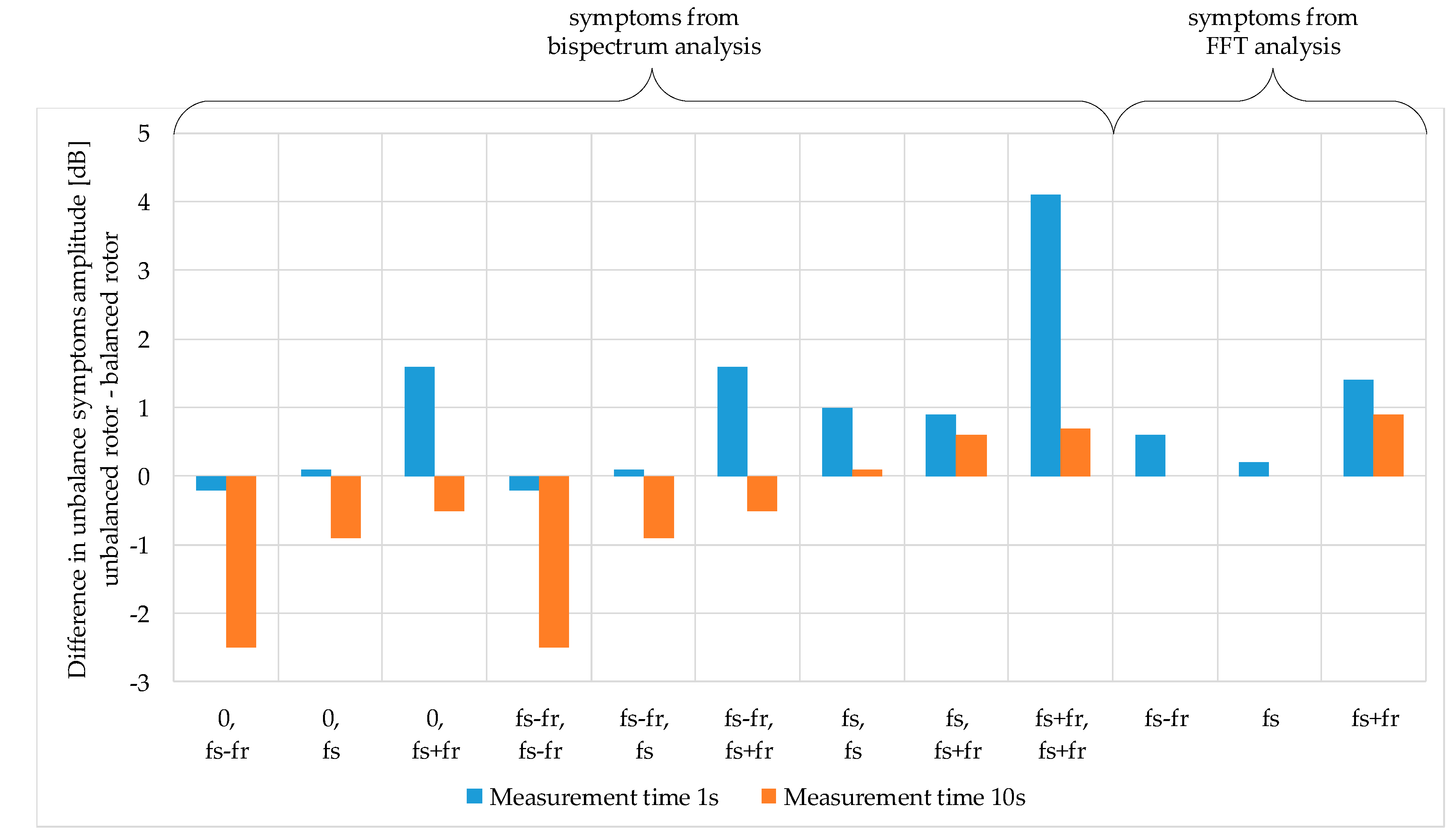
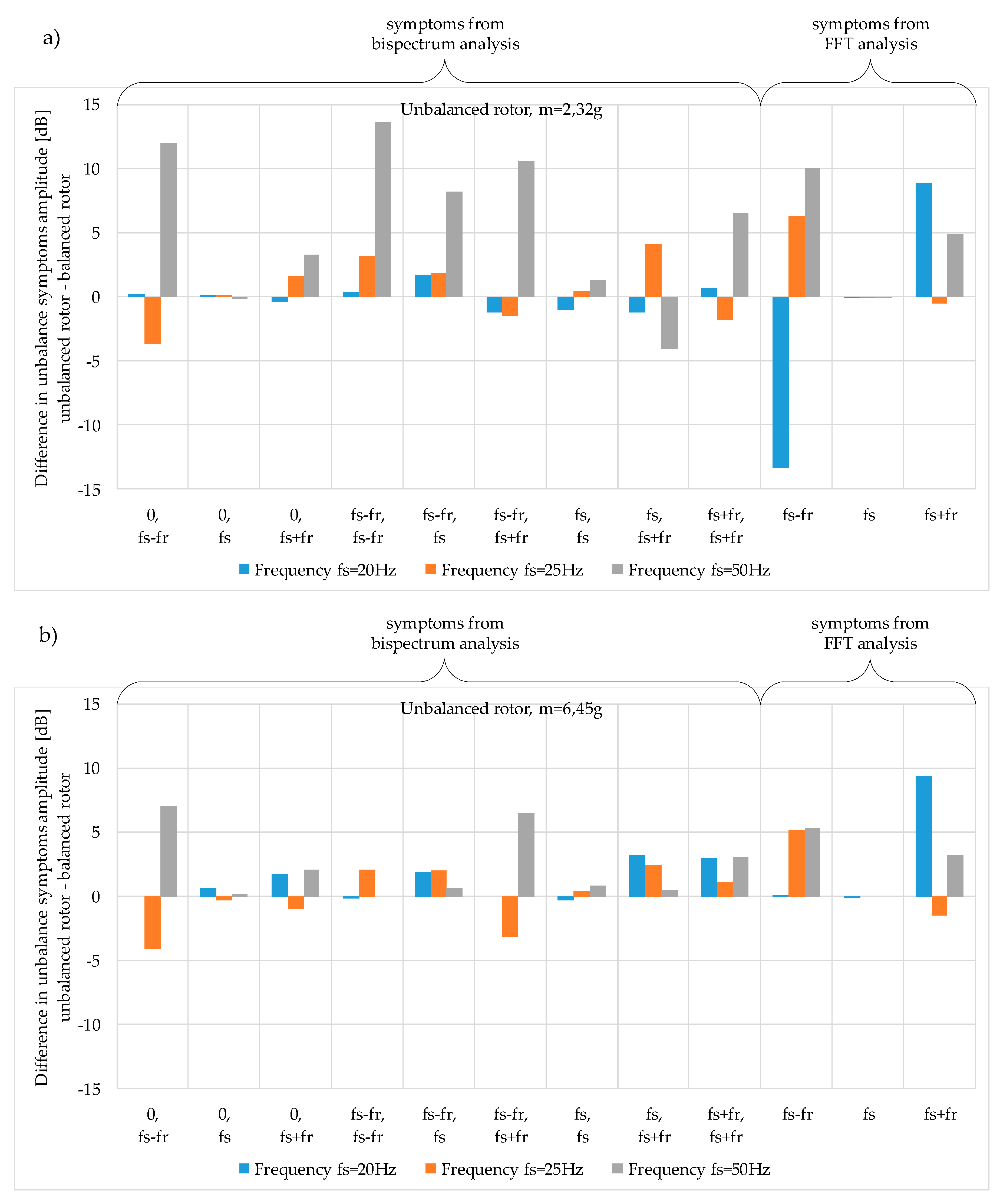
5.2. Results Analysis for Case No. 2
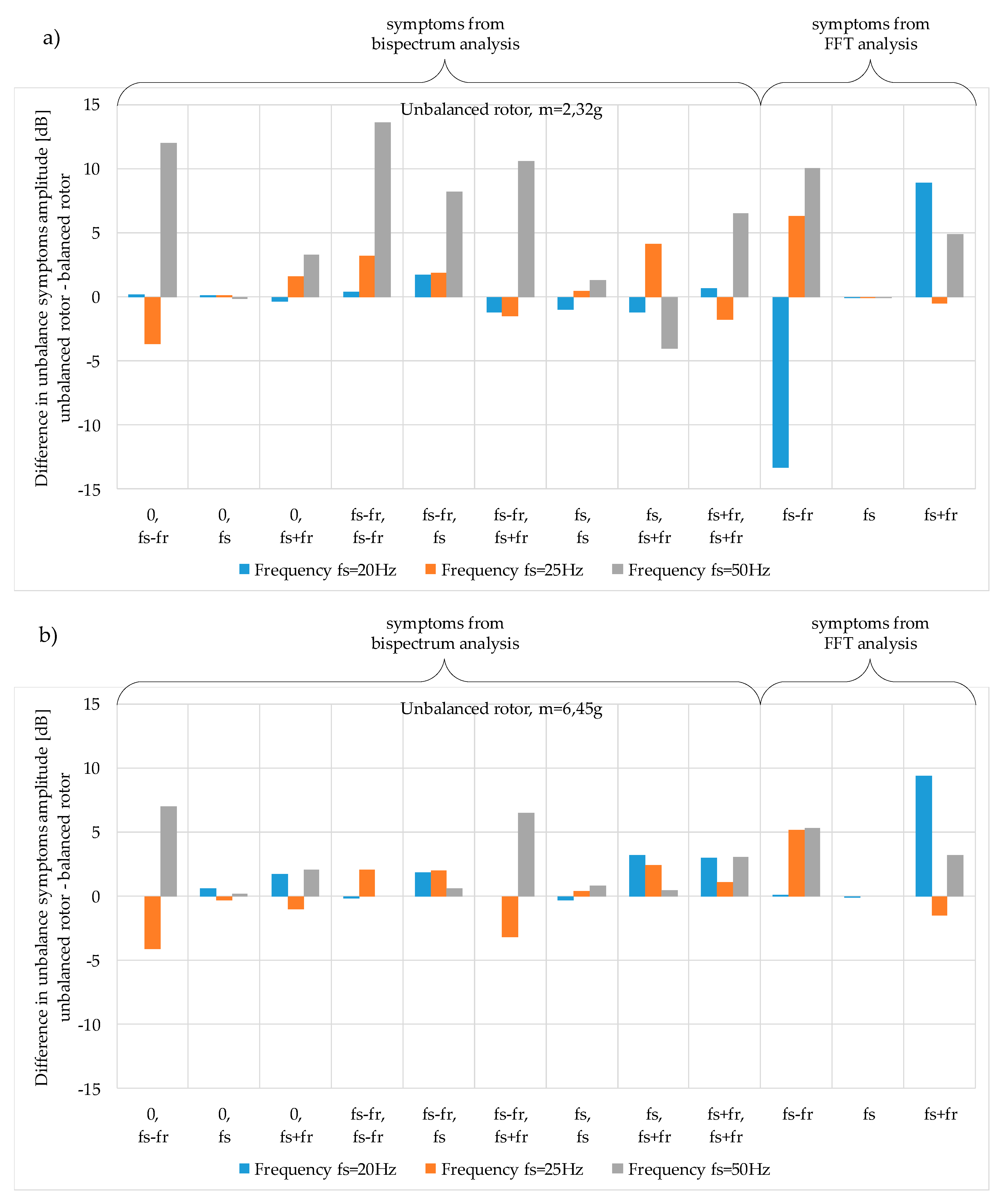
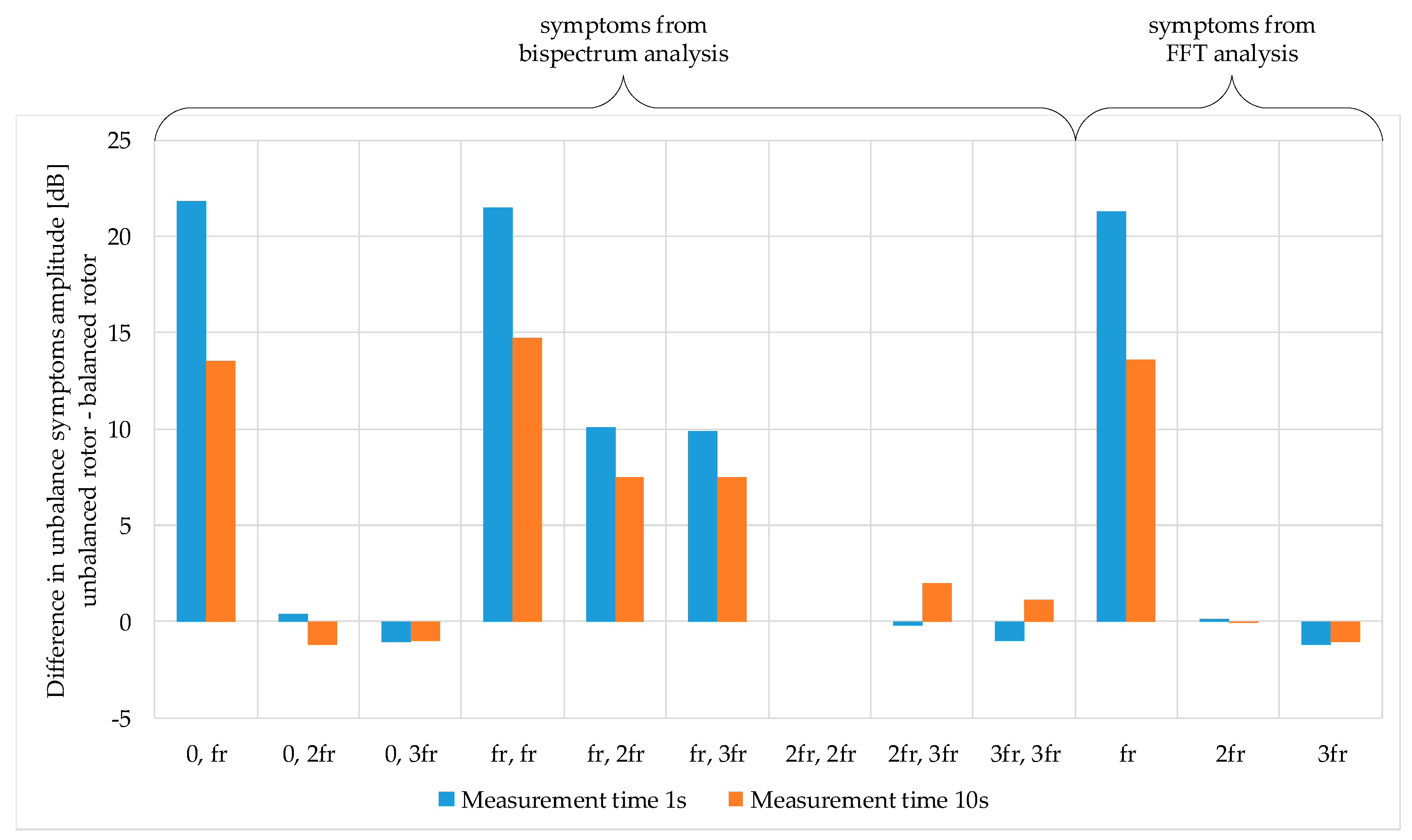
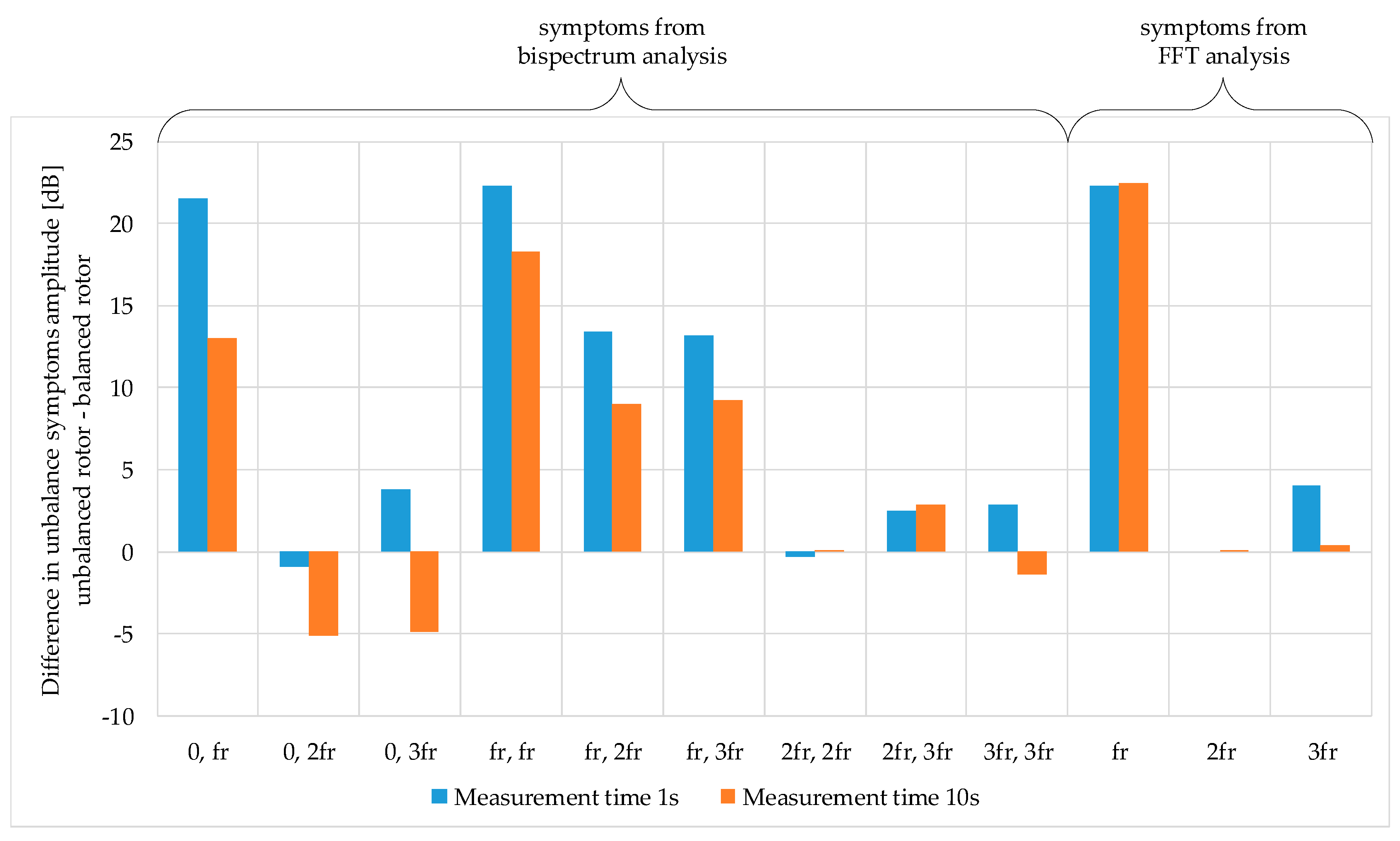
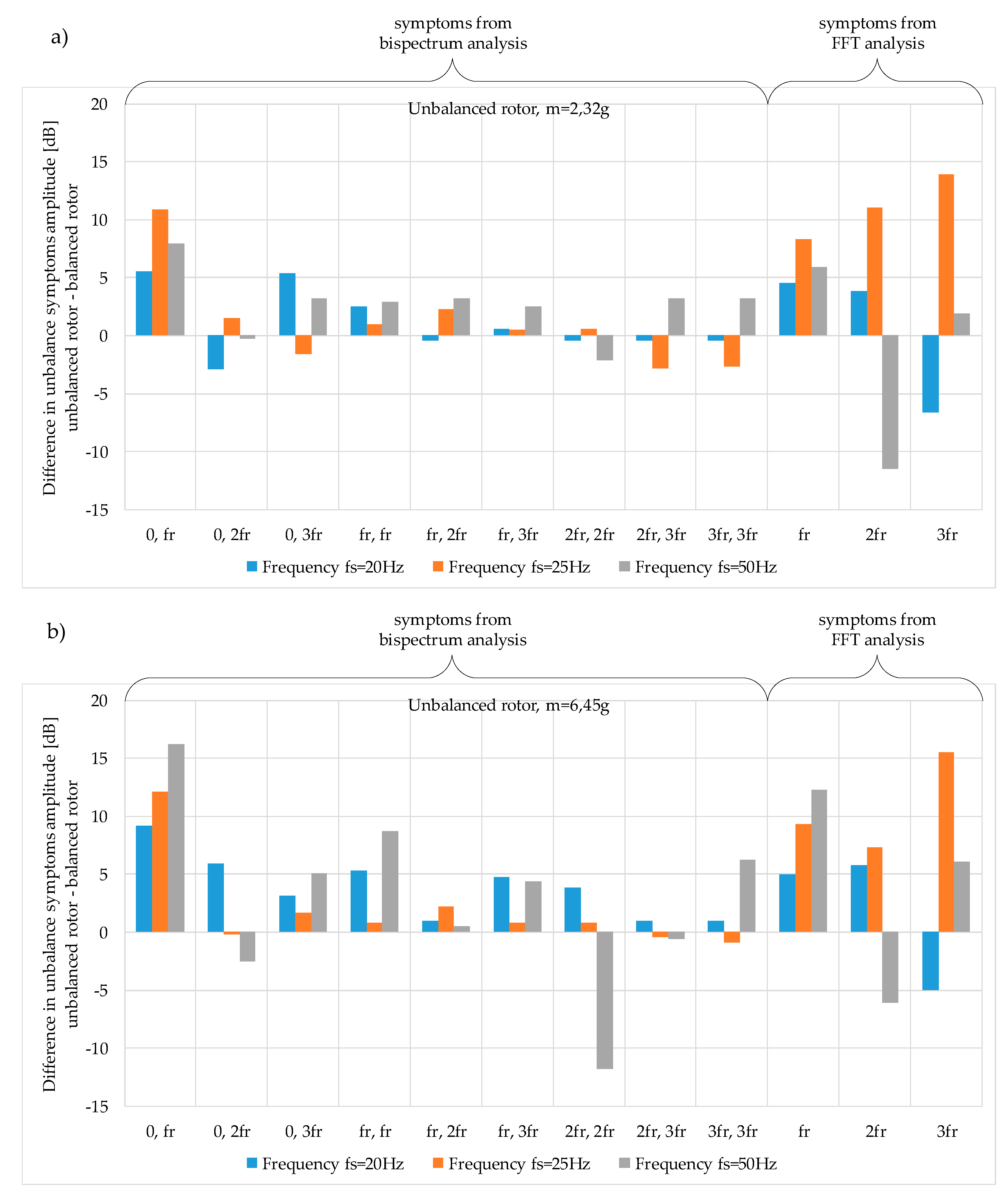
5.3. Results Analysis for Case No. 3
6. Summary
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Type of Motor | |
|---|---|---|
| Sh90L-4 CELMA INDUKTA | ShR90-2S BESEL–BRZEG | |
| Rated output PN (kW) | 1.5 | 1.5 |
| Rated voltage UN (V) | 230∆/400Y | 220∆/380Y |
| Frequency fN (Hz) | 50 | 50 |
| Speed nN (RPM) | 1410 | 2820 |
| Efficiency ηN (%) | 79 | - |
| Power factor cos ϕN (–) | 0.78 | 0.84 |
| Rated current IN (A) | 6.1/3.5 | 5.9/3.4 |
| Number of pole pairs (–) | 2 | 1 |
References
- Almeida, A.T.d; Ferreira, F.J.T.E.; Fong, J.; Fonseca, P. EUP Lot 11 Motors; Final Report; University of Coimbra: Coimbra, Portugal, 2008. [Google Scholar]
- Rassõlkin, A.; Belahcen, A.; Kallaste, A.; Vaimann, T.; Lukichev, D.V.; Orlova, S.; Heidari, H.; Asad, B.; Acedo, J.P. Life cycle analysis of electrical motor-drive system based on electrical machine type. In Proceedings of the Estonian Academy of Sciences; Estonian Academy Publishers: Liivalaia, Tallinn Estonia, 2020; Volume 69, pp. 162–177. [Google Scholar]
- Rotating Electrical Machines—Part 30-1: Efficiency Classes of Line Operated AC Motors (IE Code). IEC 60034-30-1:2014, 3 June 2014.
- Siddiqui, K.M.; Sahay, K.; Giri, V.K. Health Monitoring and Fault Diagnosis in Induction Motor- A Review; (An ISO 3297: 2007 Certified Organization). Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2014, 3, 6549–6565. [Google Scholar]
- Choudhary, A.; Goyal, D.; Shimi, S.L.; Akula, A. Condition Monitoring and Fault Diagnosis of Induction Motors: A Review. Arch. Comput. Methods Eng. 2018, 26, 1221–1238. [Google Scholar] [CrossRef]
- Salah, M.; Bacha, K.; Chaari, A. Comparative investigation of diagnosis media for induction machine mechanical unbalance fault. ISA Trans. 2013, 52, 888–899. [Google Scholar] [CrossRef] [PubMed]
- Hang, J.; Zhang, J.; Cheng, M.; Wang, Z. Fault diagnosis of mechanical unbalance for permanent magnet synchronous motor drive system under nonstationary condition. In Proceedings of the 2013 IEEE Energy Conversion Congress and Exposition, Denver, CO, USA, 15–19 September 2013; pp. 3556–3562. [Google Scholar] [CrossRef]
- Rahman, M.; Uddin, M.N. Online Unbalanced Rotor Fault Detection of an IM Drive Based on Both Time and Frequency Domain Analyses. IEEE Trans. Ind. Appl. 2017, 53, 4087–4096. [Google Scholar] [CrossRef]
- Niu, G. Data-Driven Technology for Engineering Systems Health Management. Design Approach, Feature Construction, Fault Diagnosis, Prognosis, Fusion and Decisions; Springer: Beijing, China, 2017. [Google Scholar] [CrossRef]
- MacCamhaoil, M. Static and dynamic balancing of rigid rotors. Bruel&Kjaer 2016, 1–20, (Application note BO 0276-12). Available online: https://www.yumpu.com/en/document/read/7936761/static-and-dynamic-balancing-of-rigid-rotors (accessed on 9 June 2020).
- Hassan, M.A.; Coats, D.; Gouda, K.; Shin, Y.-J.; Bayoumi, A. Analysis of nonlinear vibration-interaction using higher order spectra to diagnose aerospace system faults. In Proceedings of the 2012 IEEE Aerospace Conference, Big Sky, MT, USA, 3–10 March 2012; pp. 1–8. [Google Scholar]
- Silva, R.R.D.; Costa, E.D.S.; Oliveira, R.C.L.D.; Mesquita, A.L.A. Fault diagnosis in rotating machine using full spectrum of vibration and fuzzy logic. J. Eng. Sci. Technol. 2017, 12, 2952–2964. [Google Scholar]
- Korkua, S.; Jain, H.; Lee, W.; Kwan, C. Wireless health monitoring system for vibration detection of induction motors. In Proceedings of the Conference Record Industrial and Commercial Power Systems Technical Conference 1993, St. Petersburg, FL, USA, 9–13 May 2010; pp. 1–6. [Google Scholar]
- Yamamoto, G.K.; da Costa, C.; da Silva, J.S. A smart experimental setup for vibration measurement and imbalance fault detection in rotating machinery. Case Stud. Mech. Syst. Signal Process. 2016, 4, 8–18. [Google Scholar] [CrossRef] [Green Version]
- Ibn Shamsah, S.M.; Sinha, J.K. Rotor Unbalance Estimation with Reduced Number of Sensors. Machines 2016, 4, 19. [Google Scholar] [CrossRef] [Green Version]
- Vaimann, T.; Sobra, J.; Belahcen, A.; Rassõlkin, A.; Rolak, M.; Kallaste, A. Induction machine fault detection using smartphone recorded audible noise. IET Sci. Meas. Technol. 2018, 12, 554–560. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Recognition of Acoustic Signals of Commutator Motors. Appl. Sci. 2018, 8, 2630. [Google Scholar] [CrossRef] [Green Version]
- Garcia-Ramirez, A.G.; Morales-Hernandez, L.A.; Osornio-Rios, R.A.; Benitez-Rangel, J.P.; Garcia-Perez, A.; Romero-Troncoso, R.D.J. Fault detection in induction motors and the impact on the kinematic chain through thermographic analysis. Electr. Power Syst. Res. 2014, 114, 1–9. [Google Scholar] [CrossRef]
- Boudiaf, M.; Cherroun, L.; BenBrika, M. Real-time diagnosis of three-phase induction machine using Arduino-Uno card based on park’s circle method. Diagnostyka 2018, 19, 63–71. [Google Scholar] [CrossRef]
- Huang, S.-R.; Huang, K.-H.; Chao, K.-H.; Chiang, W.-T. Fault analysis and diagnosis system for induction motors. Comput. Electr. Eng. 2016, 54, 195–209. [Google Scholar] [CrossRef]
- Lee, J.-H.; Pack, J.-H.; Lee, I.-S. Fault Diagnosis of Induction Motor Using Convolutional Neural Network. Appl. Sci. 2019, 9, 2950. [Google Scholar] [CrossRef] [Green Version]
- Wolkiewicz, M.; Skowron, M. Diagnostic System for Induction Motor Stator Winding Faults Based on Axial Flux. Power Electronics Drives 2017, 2, 137–150. [Google Scholar] [CrossRef]
- Pesch, A.H.; Scavelli, P.N. Condition Monitoring of Active Magnetic Bearings on the Internet of Things. Actuators 2019, 8, 17. [Google Scholar] [CrossRef] [Green Version]
- Gomaa, F.R.; Khader, K.M.; Eissa, M.A. Fault Diagnosis of Rotating Machinery based on vibration analysis. Int. J. Adv. Eng. Glob. Technol. 2016, 4, 1571–1586. [Google Scholar]
- Zhang, M.; Wang, T.; Tang, T.; Benbouzid, M.; Diallo, D. An imbalance fault detection method based on data normalization and EMD for marine current turbines. ISA Trans. 2017, 68, 302–312. [Google Scholar] [CrossRef]
- Mohammadi, E.; Fadaeinedjad, R.; Moschopoulos, G. Performance Investigation of a Stall-Regulated Wind Turbine Considering Rotor Imbalance Faults. In Proceedings of the IECON 2019-45th Annual Conference of the IEEE Industrial Electronics Society, Lisbon, Portugal, 14–17 October 2019; Volume 1, pp. 2469–2474. [Google Scholar]
- Mendel, J.M. Tutorial on higher-order statistics (spectra) in signal processing and system theory: Theoretical results and some applications. Proc. IEEE 1991, 79, 278–305. [Google Scholar] [CrossRef]
- Benbouzid, M.E.H. A review of induction motors signature analysis as a medium for faults detection. IEEE Trans. Ind. Electron. 2000, 47, 984–993. [Google Scholar] [CrossRef] [Green Version]
- Saidi, L. The deterministic bispectrum of coupled harmonic random signals and its application to rotor faults diagnosis considering noise immunity. Appl. Acoust. 2017, 122, 72–87. [Google Scholar] [CrossRef]
- Sun, L.; Feng, Z.; Lu, N.; Wang, B.; Zhang, W. An advanced bispectrum features for EEG-based motor imagery classification. Expert Syst. Appl. 2019, 131, 9–19. [Google Scholar] [CrossRef]
- Chow, W.S.; Fei, G. Three phase induction machines asymmetrical faults identification using bispectrum. IEEE Trans. Energy Convers. 1995, 10, 688–693. [Google Scholar] [CrossRef]
- Matsuoka, T.; Ulrych, T.J. Phase estimation using the bispectrum. Proc. IEEE 1984, 72, 1403–1411. [Google Scholar] [CrossRef]
- Yang, D.-M.; Stronach, A.F.; MacConnell, P.; Penman, J. Third-Order Spectral Techniques for the Diagnosis of Motor Bearing Condition Using Artificial Neural Networks. Mech. Syst. Signal Process. 2002, 16, 391–411. [Google Scholar] [CrossRef]



© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ewert, P. The Application of the Bispectrum Analysis to Detect the Rotor Unbalance of the Induction Motor Supplied by the Mains and Frequency Converter. Energies 2020, 13, 3009. https://doi.org/10.3390/en13113009
Ewert P. The Application of the Bispectrum Analysis to Detect the Rotor Unbalance of the Induction Motor Supplied by the Mains and Frequency Converter. Energies. 2020; 13(11):3009. https://doi.org/10.3390/en13113009
Chicago/Turabian StyleEwert, Pawel. 2020. "The Application of the Bispectrum Analysis to Detect the Rotor Unbalance of the Induction Motor Supplied by the Mains and Frequency Converter" Energies 13, no. 11: 3009. https://doi.org/10.3390/en13113009
APA StyleEwert, P. (2020). The Application of the Bispectrum Analysis to Detect the Rotor Unbalance of the Induction Motor Supplied by the Mains and Frequency Converter. Energies, 13(11), 3009. https://doi.org/10.3390/en13113009