1. Introduction
Insect-scaled robots have attracted attention owing to their potentially diverse applications: rescue missions, inspections of building structures, and remote sensing. Various types of insect-scaled robot have been created, such as micro aerial vehicles (MAVs) [
1,
2,
3], walking/running robots [
4,
5,
6], and swimming robots [
7,
8]. One of the most important components of the robot is the actuator; therefore, many actuation mechanisms and principles have been researched. Actuation based on the piezoelectric effect- is considered to be the most promising in terms of power density and output power [
9]. For example, an insect-inspired MAV called “RoboBee,” which is developed by a group of Harvard University students, is the lightest and smallest vehicle capable of tethered controlled flight at present [
1,
2]. They employed a piezoelectric bimorph actuator to flap wings.
Power efficiency is one of the most important performance aspects of flight robots because lower efficiency requires larger mass of an on-board battery. During piezoelectric actuation, energy loss in parasitic capacitance is a crucial concern; it can significantly deteriorate the electrical–mechanical power conversion efficiency of the system. Note that here we define “parasitic capacitance” as the capacitive component of a piezoelectric actuator due to its dielectricity.
Figure 1a shows a simplified structure of a flapping wing actuator to explain the loss mechanism. It consists of a piezoelectric bending actuator and a wing. The piezoelectric actuator comprises a laminated layer of a piezoelectric and elastic plate. By applying a voltage to the actuator, a strain is induced in the piezoelectric layer by the piezoelectric effect, and this strain bends the actuator, which in turn causes the wing to flap. By applying an alternating current (AC) voltage with a frequency that matches with the actuator’s resonance, large flapping motion can be produced.
Figure 1b shows a simple circuit composed of a DC voltage source and a switch. By switching the connection between the direct current (DC) voltage source and the ground repeatedly, we can apply a square voltage wave to the actuator. The piezoelectric actuator can be equivalently represented by a parallel circuit of a parasitic capacitance
and an impedance
; the circuit expresses the mechanical system in a simplistic form [
10]. The electrical power consumed by
is identical to the mechanical output power. The focus of this study is on parasitic capacitance. When the switch is connected to the DC voltage source
, energy of
is dissipated through the parasitic resistances, i.e., the switch’s on-resistance. In contrast, when the switch is connected to the ground, the stored energy in
, which is
, is released; therefore, electric power of
is lost in a cycle. In summary, the stored charge in the parasitic capacitance is fully dissipated using a simple switching driver circuit (a detailed explanation is provided in
Section 2). If the charge can be reused, efficiency will be improved. Therefore, many studies have been carried out on charge recovery [
11,
12,
13,
14,
15,
16]. They can be categorized into two methods: one using an inductor and the other with a capacitor. Using the back electromotive force of the inductor, the energy in the parasitic capacitance can be reused to actuate a piezoelectric device [
11,
12]. Ideally, by employing an inductor with large inductance and low resistance, all the energy in the parasitic capacitance is recovered. The drawback of this method is the inductor’s huge mass, which generally makes the inductor bulky and heavy; therefore, it is not suitable for mobile robot applications.
Several researchers proposed charge recovery circuits that transfer the charge in the parasitic capacitance to another capacitor (or piezoelectric actuator) and reuses it [
13,
14,
15,
16]. Their circuits utilizing capacitors are lighter than those with inductors because they are composed of switches. The switching devices must be insulated because the voltage at both ends varies. Such insulated switching devices are still large and heavy, which makes them impractical. There is another approach, which supplies a smoothly varying voltage signal. Karpelson et al. discovered a circuit and control scheme, where a high voltage quasi-sinusoidal wave is output by controlling a DC–DC converter circuit [
17]. Theoretically, this is not affected by energy loss due to parasitic capacitance. We concluded that their approach is effective for robots with a few actuators but not suitable for robots with several legs/wings. This is because a robot requires DC–DC converters and feedback controls for each independent actuator.
Therefore, we propose a charge recovery circuit concept, which requires only lightweight passive components. Here, we control a current flow by a resister and diodes but not switching devices. To our knowledge, this is the first report of a passive charge recovery approach. In this study, a guideline for the selection of components based on a simplified theoretical model is provided. In addition, we conduct a demonstration of the proposed concept.
2. Proposed Concept
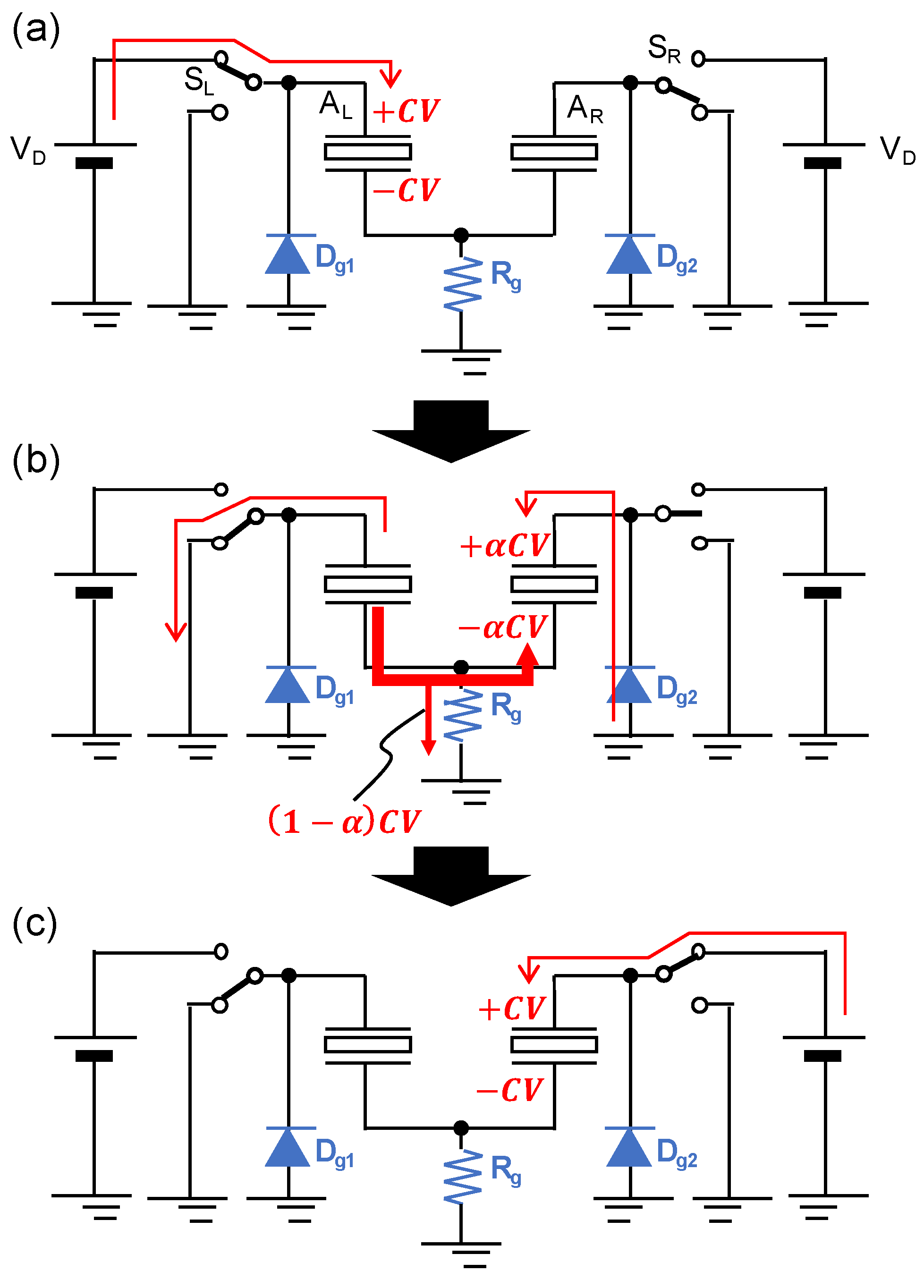
To clarify the advantages of our new concept, we start by reviewing basic, previously reported driving circuits. Because our concept is based on charge recovery between capacitors, we do not review recovery methods using inductors here. If the energy stored in the parasitic capacitance can be transferred to another capacitor or capacitive component and can be reused, the power efficiency of the system can be improved as stated in the previous section. Campolo et al. created a charge recovery method with two piezoelectric actuators [
14]. Edamana et al. also proposed a similar circuit, which included optimal control schemes for precise positioning [
15,
16].
Figure 2 illustrates a simplified circuit of these concepts. Note that the actuator is regarded as a capacitor because we are focusing on the influence of parasitic capacitance. First, the left actuator
is charged with a charge of
, which is stored, as shown in
Figure 2a. Then, by changing the statuses of both the left and right switches,
and
, to open (high impedance), the center switch
is turned on. Thus, the stored charge moves to the right actuator (
Figure 2b).
The ratio of the recovered charge to
,
depends on the impedance
near
and
. Campolo et. al. reported that 92% and 75% of the charges were successfully recovered by employing an inductor for
with the loads of a capacitor and a bimorph piezoelectric actuator, respectively [
14]. Finally,
is turned to the DC voltage source
and
is charged to a potential of
(
Figure 2c). A disadvantage of this design is the increase in mass due to the additional switches (
and
) used for charge recovery. The voltage at both ends of
and
varies from ground to
V. Common switching devices, such as metal-oxide-semiconductor field-effect transistors (MOSFETs) and bipolar transistors, can not to be used. Due to the high voltage involved, insulated switches like photo-MOS relays are needed. However, such devices are generally much heavier than common transistors. For insect-scaled robots, especially MAVs, their weight is the most important specification since the mass directly determines the required output power. Thus, the weight increase caused by the insulated switches will cancel the efficiency improvement brought about by charge recovery.
Based on previous studies, we sought another approach, which employed only lightweight components and did not use insulated switch devices.
Figure 3 shows the concept of the proposed circuit. Similar to
Figure 2, we also use a paired piezoelectric circuit and intend to recover the charge between the capacitors. The key components are a resistor in between the actuators, the ground wire
, and diodes
and
, which are connected to the high side of the actuators and colored in blue in the figure. First,
is charged via
and a charge of
is stored (
Figure 3a). At this step,
is set to ground and stores no charge. Next,
is connected to ground and
is set to high-impedance status (
Figure 3b). If the impedance from
to
is smaller than
, the charge stored in
flows to
instead of to the ground. A partial amount of the charge,
will be recovered. The unrecovered energy
is consumed by
and other resistivity through the current path.
blocks the charge to be released. Finally,
is connected to the DC voltage source
and
is charged to a potential of
(
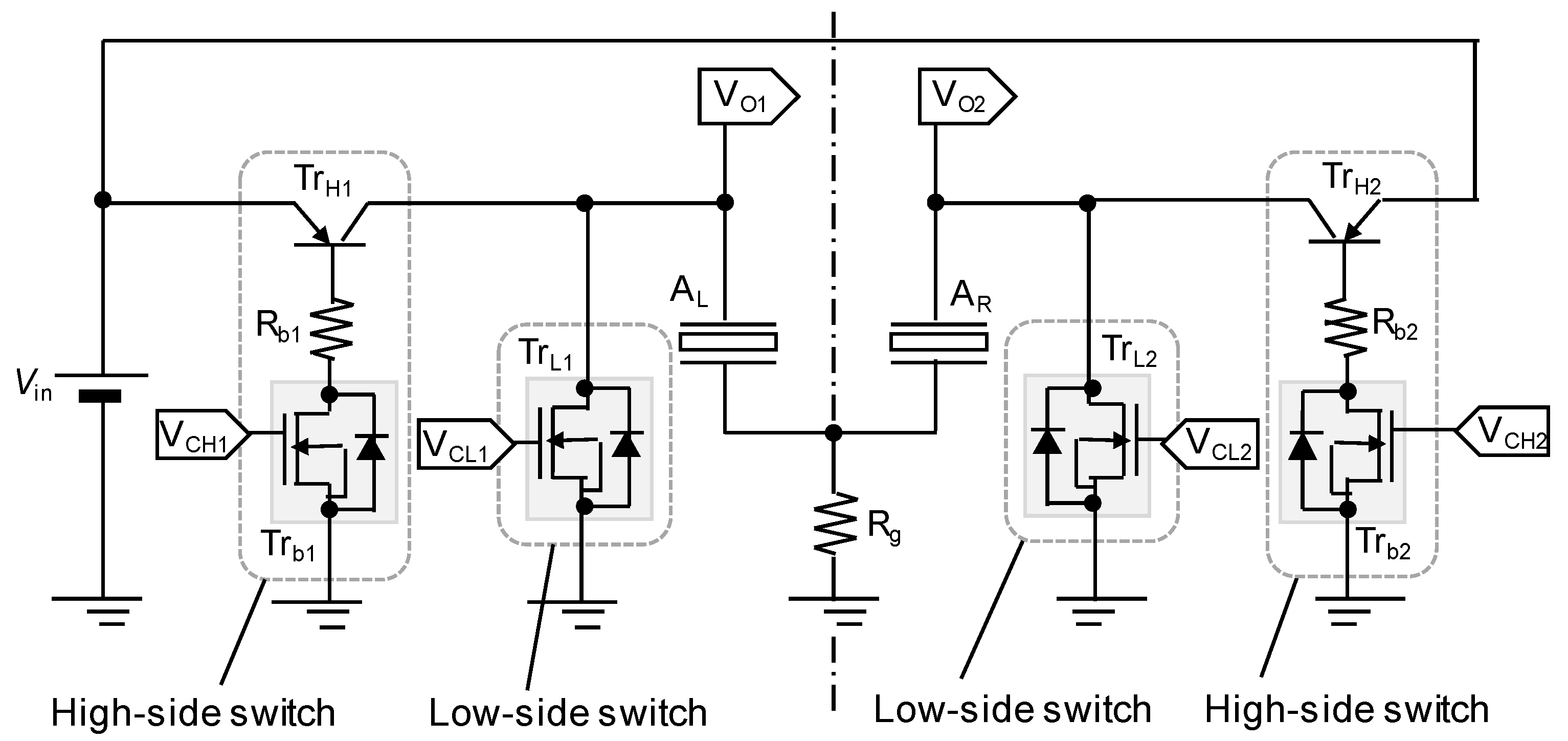
Figure 3c). This approach is realized using only three passive components and their weight increase is smaller than the conventional charge recovery circuits. In addition, utilizing MOSFET for the low-side switches, the two diodes can be omitted because the general commercial MOSFET includes a parasitic body diode. Therefore, this approach can be realized with an additional resistor.
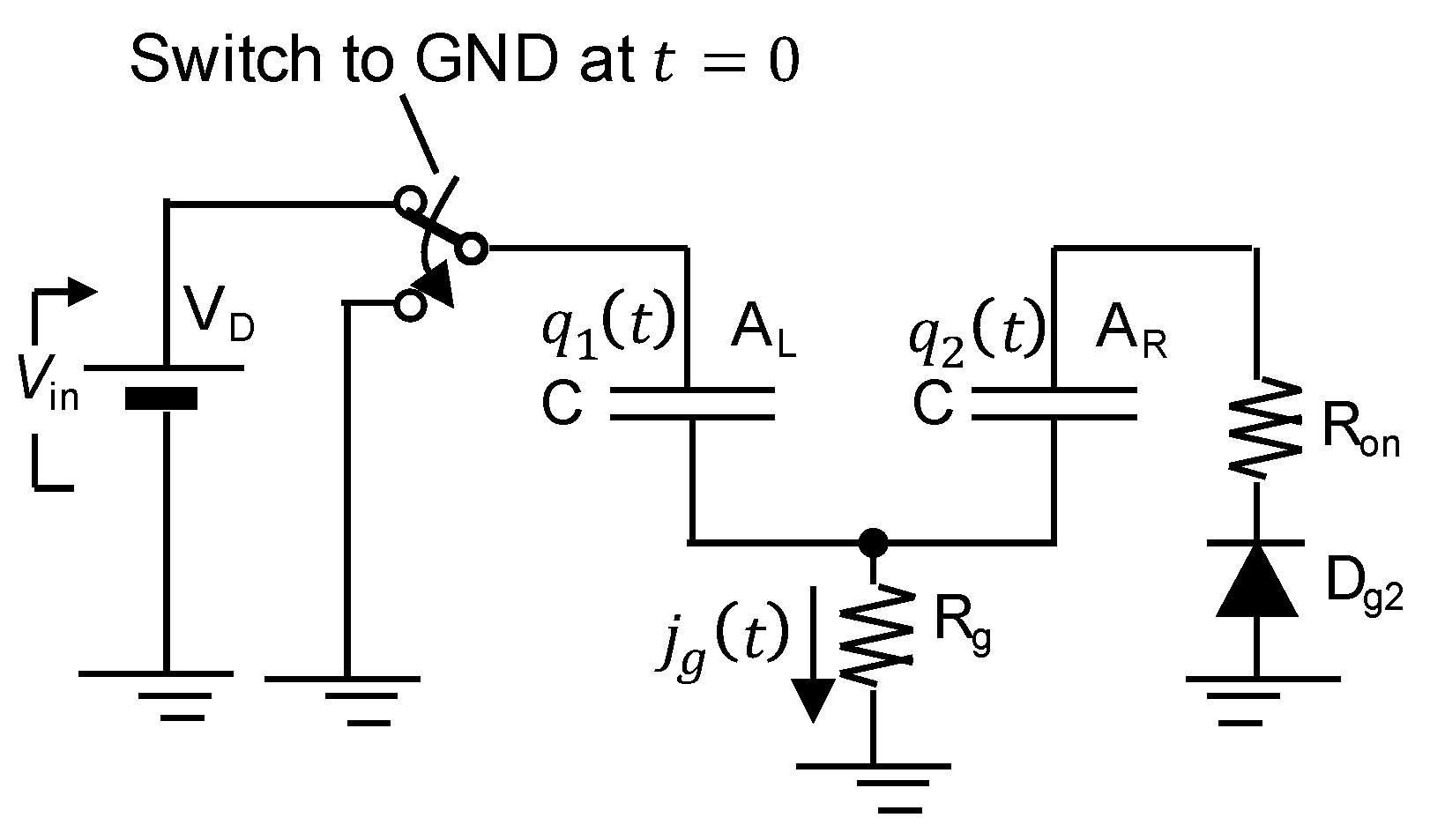
Here, we examined the amount of recovered charge expected from this concept based on a simplified theoretical model.
Figure 4 shows the extracted, simplified circuit of the concept. We only consider the charge transition behavior at the switching moment. Before switching,
and
have stored a charge of
and 0, respectively. When
, the high side of
is connected to the ground. The equations express the system and initial conditions are as below:
where
, and
are capacitance of the capacitors (
and
), the charge stored in
, charge stored in
, and the current flowing through
, respectively.
represents the forward resistance of the diode
. Defining
and
, Equation (1) can be transformed as:
With the initial condition (Equation (2)), this can be solved as:
where
and
. The diode prohibits
to flow to the ground;
is kept at a local maximum value. This is derived by solving
Because
,
equal to
. Solving this equation, the time at the local maximum
,
is obtained as:
As the result of the switching operation,
finally becomes:
Thus, the ratio of the recoverable charge,
, is expressed as:
Here, assuming
and defining
,
and
can be approximated as:
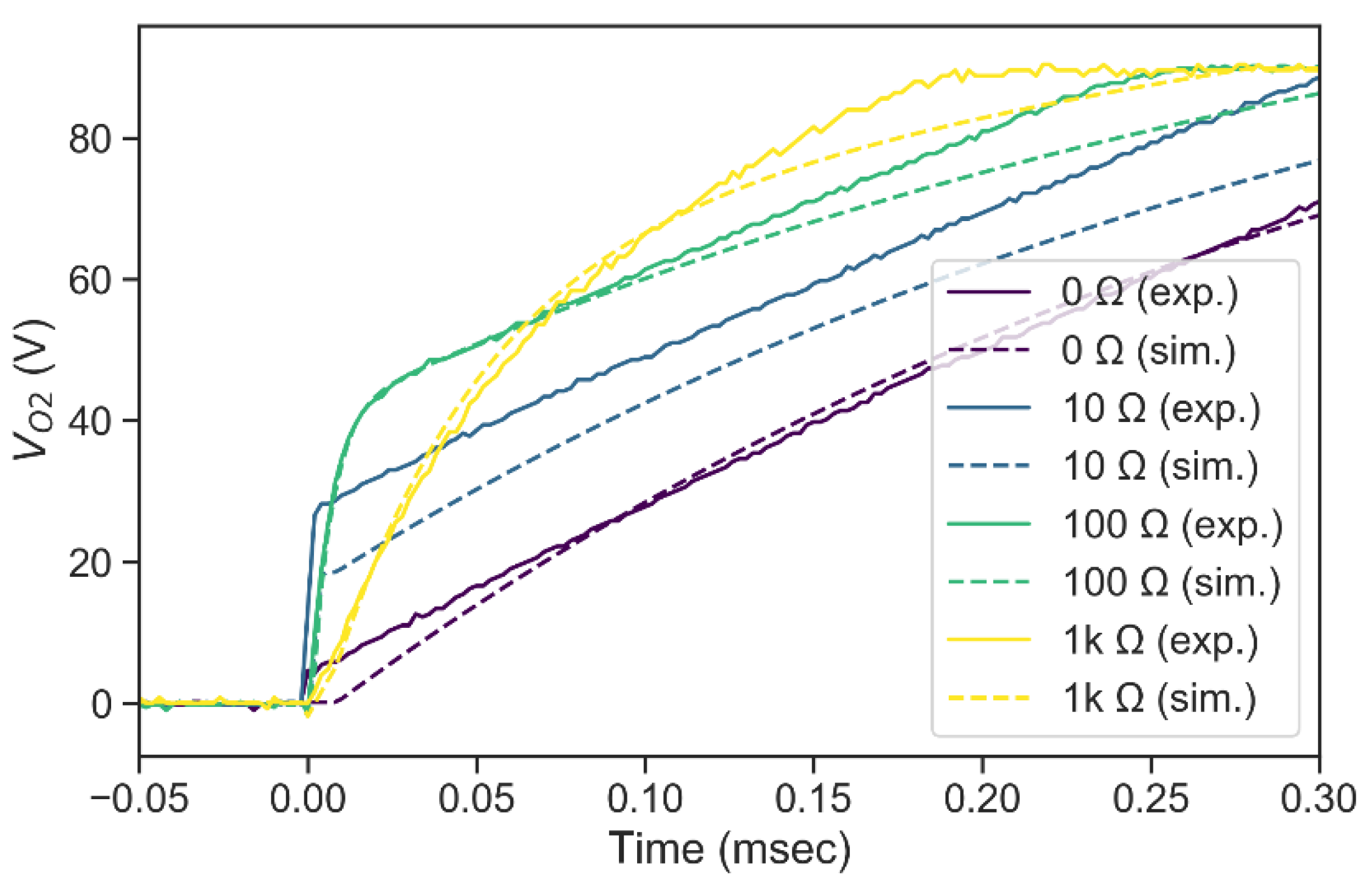
Figure 5 shows the relationship between
and
to
. This graph suggests that a larger
results in a higher
;
asymptotically approaches the maximum value of 50%. In addition, it was also found that a larger
led to an increase in
. To obtain both small
and large
, we considered
as the preferred range. Given that
is generally around 1 Ω, we employed resistances less than 1 kΩ for
in the experiment.
5. Conclusions
In this study, we proposed a new charge recovery circuit concept, which required only three lightweight passive components, a resistor, and two diodes. In addition, using general MOSFET for the switching devices, the diodes can be omitted; the proposed concept in practice needs only an additional resistor. We presented a guideline that can be used to select the resistance based on a simplified theoretical model. In addition, we successfully demonstrated that power efficiency improved when the concept was employed in the circuit.
This concept is limited to a paired-actuator system because the charge stored in an actuator should be recovered by another actuator. Since this applies not only to two independent actuators but also a bimorph actuator, which consists of two laminated piezoelectric plates, we consider the possible application field to be wide. Another expected limitation is the switching frequency. The addition of makes switching time slower. High-frequency applications, such as ultrasonic transducers, are not suitable for this concept. In contrast, most micro, insect-scaled robots require relatively low frequency. Therefore, our concept will be applicable to them. For example, the flapping frequency of FWMAV is in the range of 10–100 Hz. In addition, we expect this concept is suitable for piezoelectric actuators with small capacitance. Because the time taken to recover the charge is proportional to the capacitance, larger capacitance results in slower charge recovery. This limits the operating frequency of the actuator. In future, we will attempt to develop a robot equipped with this circuit to realize a power-efficient and lightweight robot.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













