Experimental Validation of Total Energy Control System for UAVs




Abstract
1. Introduction
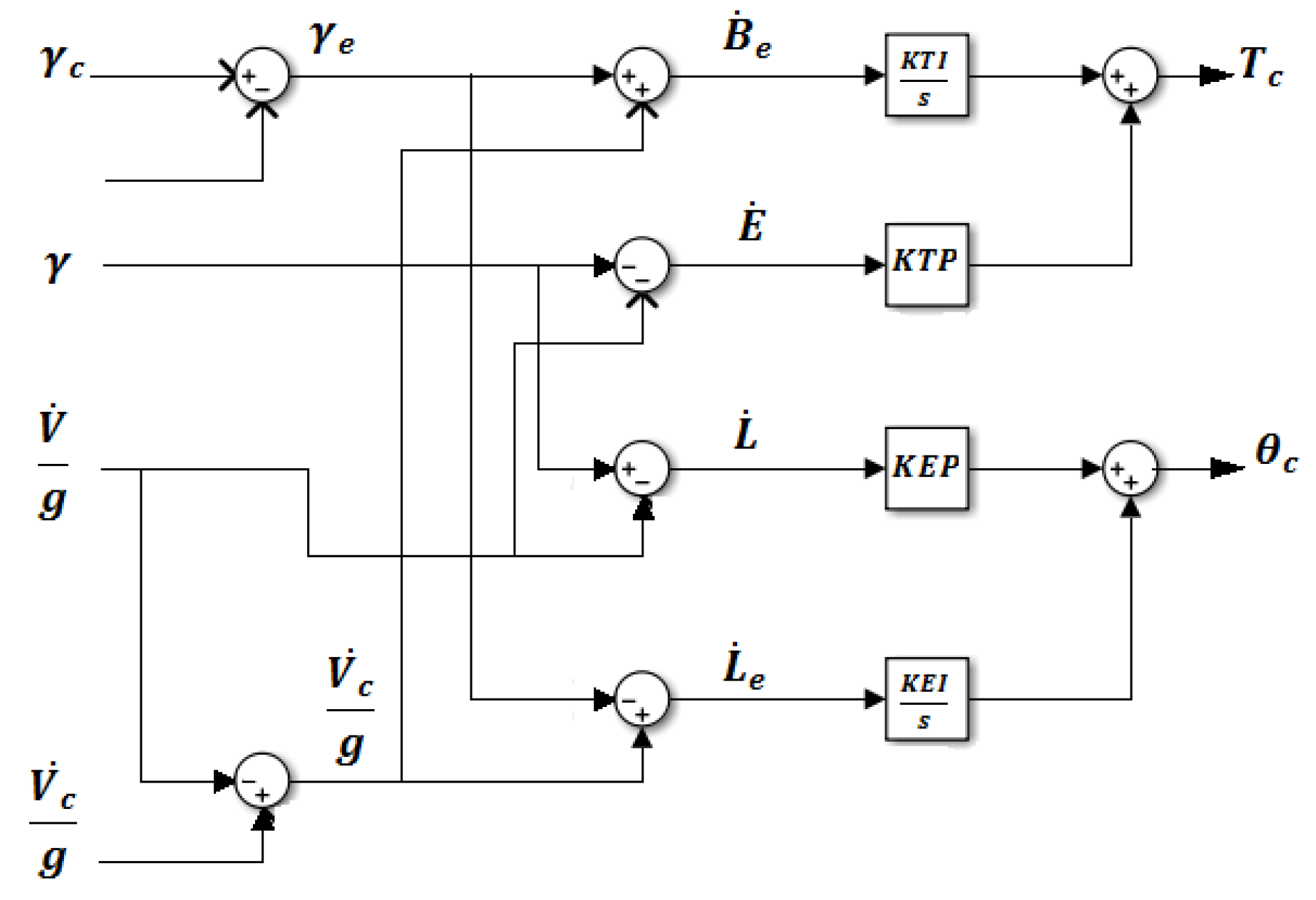
2. Total Energy Control System (TECS)
Aircraft Energy Equations
3. Extended Kalman Filter Description
3.1. Quaternion-Based EKF
3.2. Euler-Angles-Based EKF
- Navigation EKF controller using a local (north, east, down (NED)) Earth frame;
- XYZ body fixed frame;
- Sequential position and velocity measurements;
- True airspeed;
- Magnetic flux measurement;
- 18-state architecture;
- IMU data;
- IMU angles and velocities are recorded with specified sample time.
- Quaternions (, , , );
- Velocity—m/s (NED);
- Position—m (NED);
- Delta Angles bias—rad;
- Delta Velocities bias—m/s);
- Wind Vector—m/s (NE);
- Earth Magnetic Field—milligauss (NED)
- Body Magnetic Field —milligauss (X,Y,Z).
- Velocity—m/s;
- Position—m;
- TAS—m/s;
- XYZ magnetic flux—milligauss;
- XY line of sight angular rate measurements from a downwards-looking optical flow sensor range to terrain measurements.
- Delta angle measurements in body axes—rad;
- Delta velocity measurements in body axes—m/s.
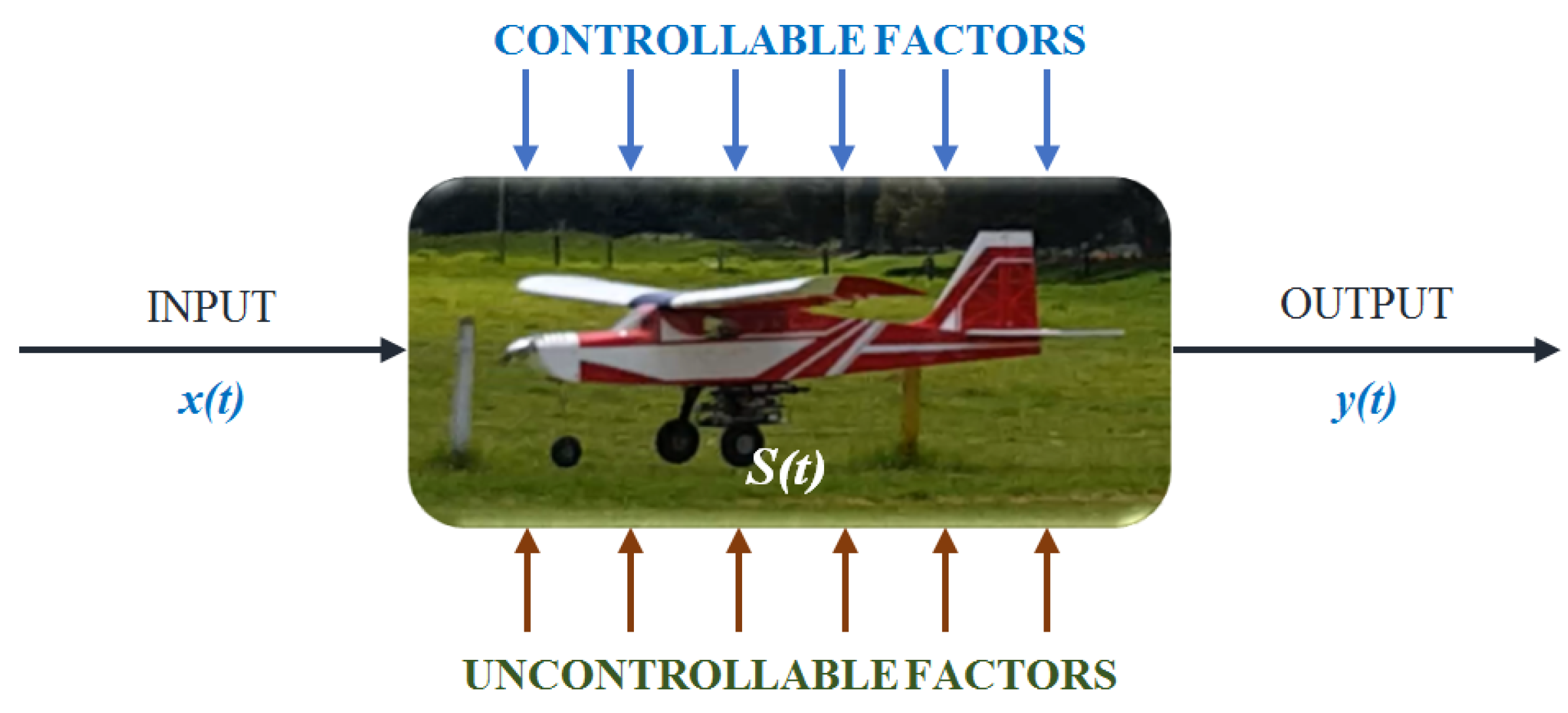
4. Airplane Dynamic Model
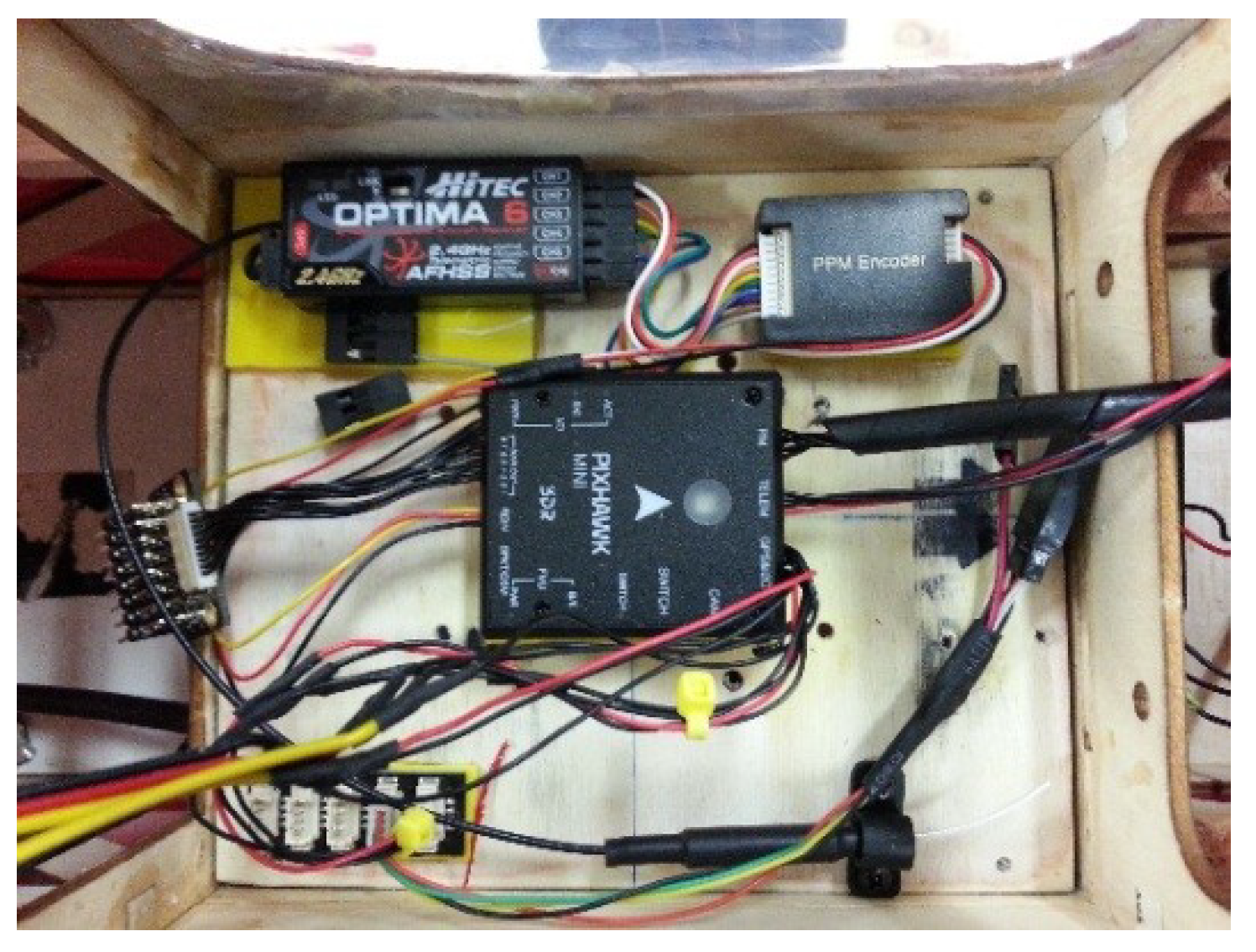
5. Experimental Arrangement
6. Flight Experiment and Initial Tuning
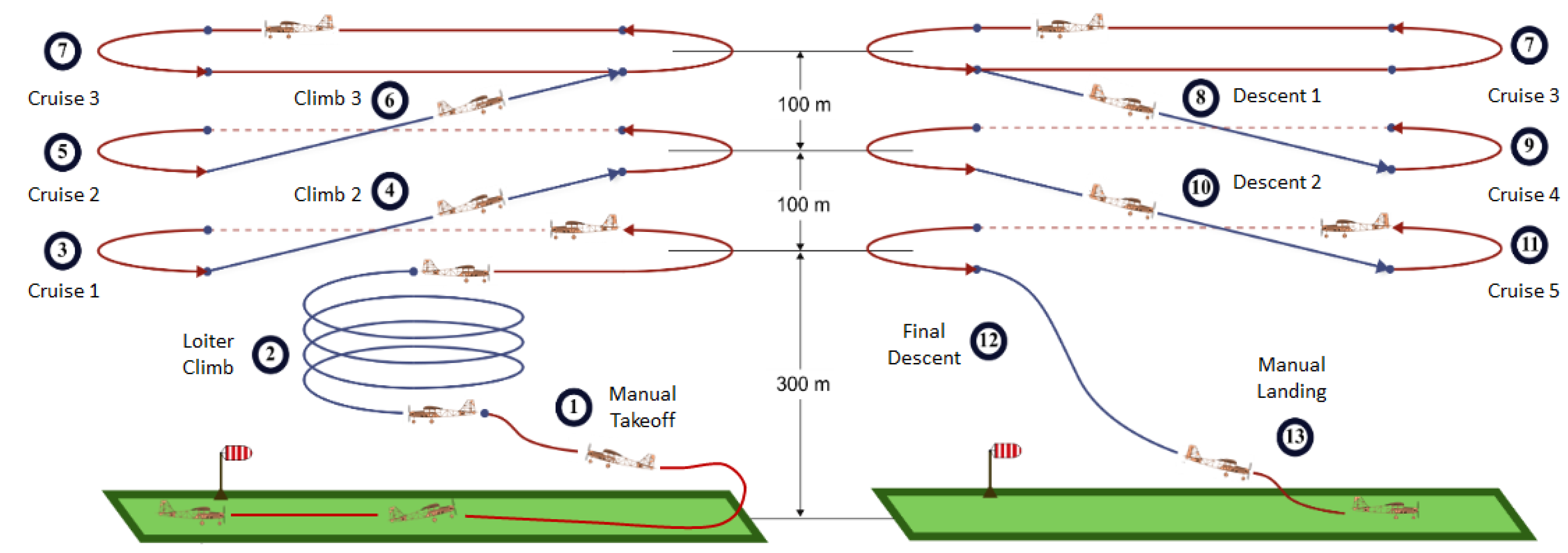
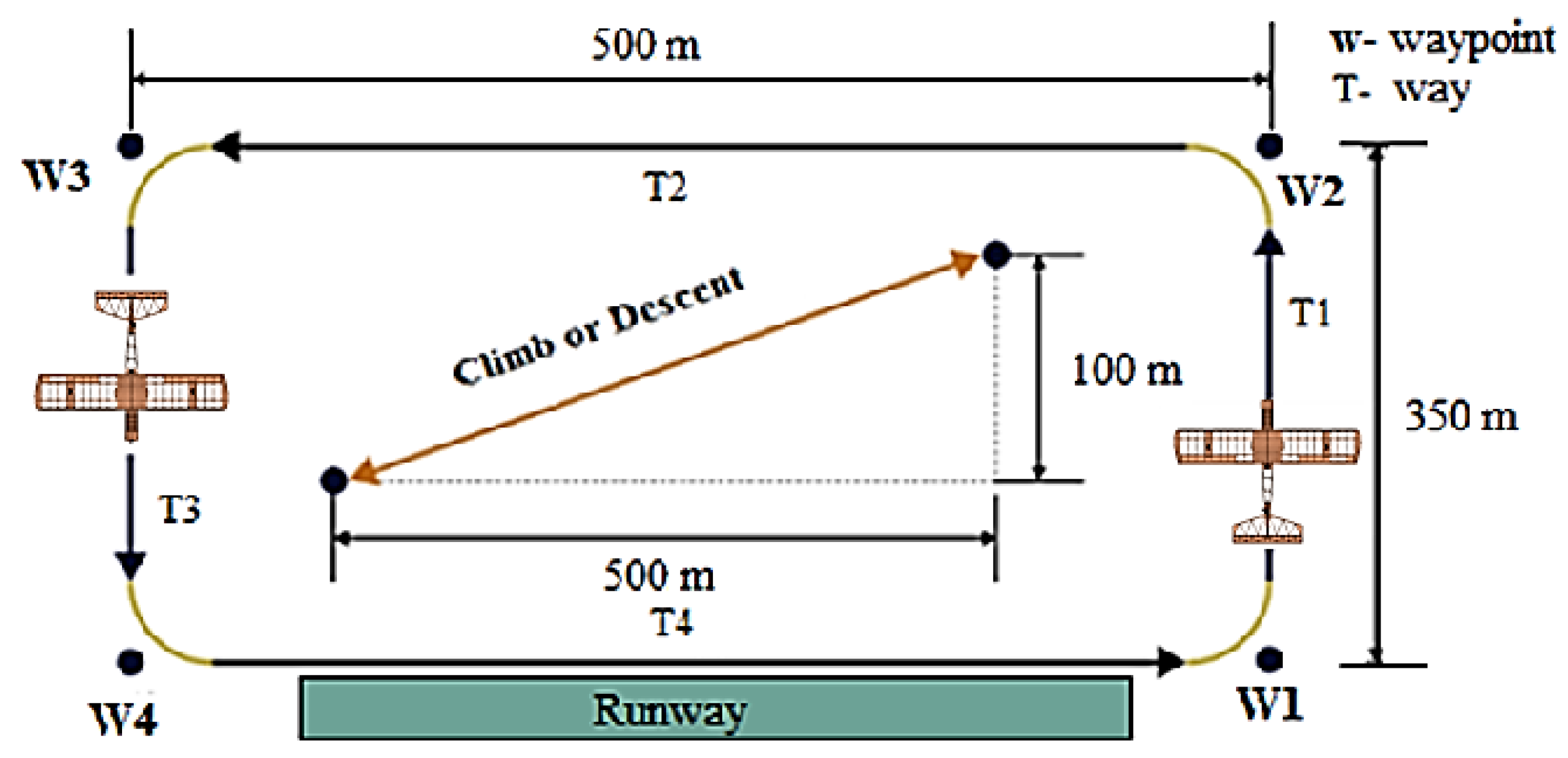
Flight Test
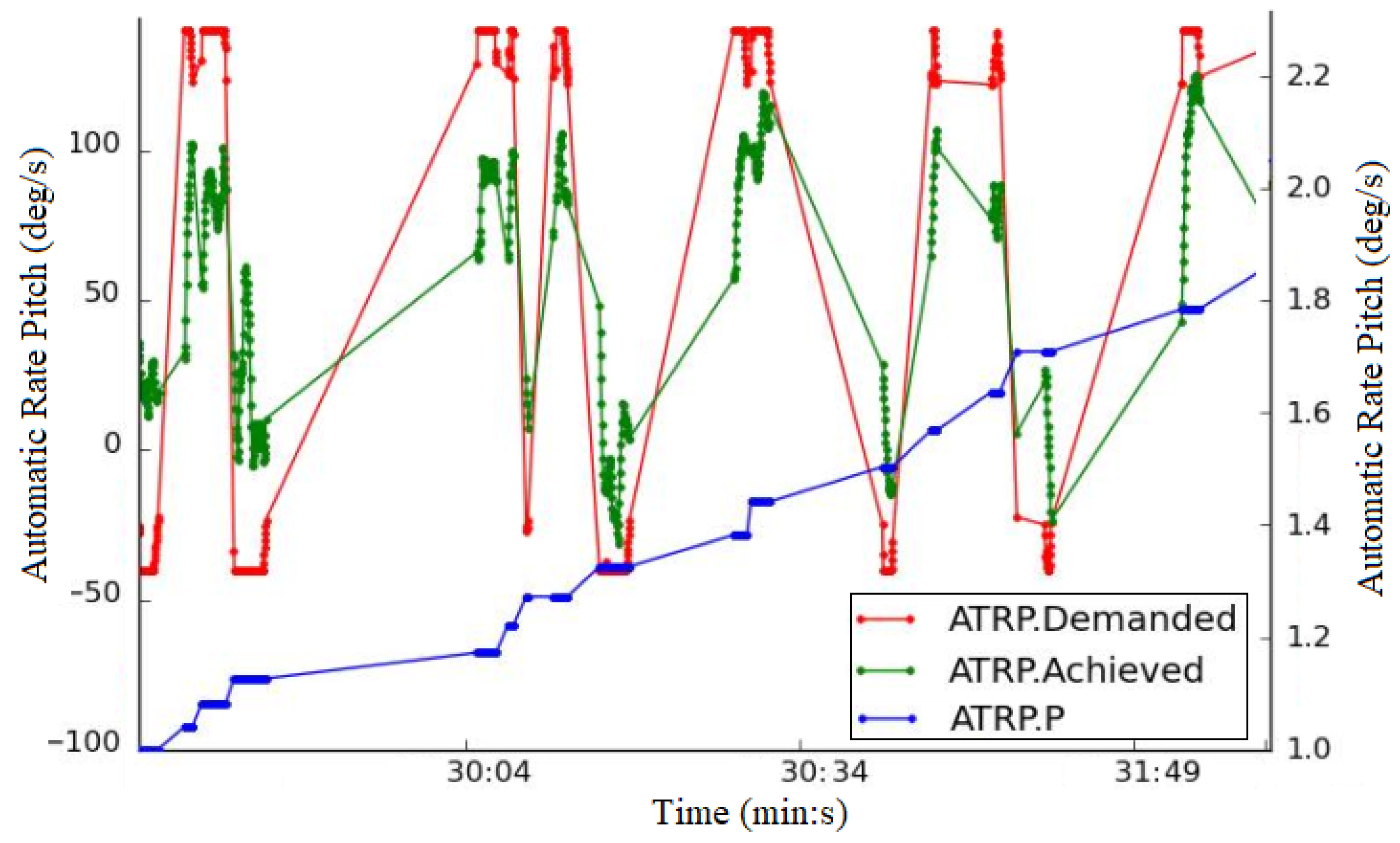
- ATRP.P is the controller P gain.
- ATRP.Achieved is what the aircraft achieved in attitude change rate.
- ATRP.Demanded is the demanded rate of attitude changes (roll rate or pitch rate) deg/s.
7. Telemetry Analysis and Results
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chadli, M.; Maquin, D.; Ragot, J. Vertical Static output feedback for Takagi-Sugeno systems: An LMI approach. In Proceedings of the 10th Mediterranean Conference on Control and Automation, Lisbon, Portugal, 9–13 July 2002. [Google Scholar]
- Chadli, M.; Borne, P. Multiple Models Approach in Automation- Takagi-Sugeno Fuzzy Systems; John Wiley & Sons: London, UK, 2013; ISBN 978-1-848-21412-5. [Google Scholar]
- Mohamed, K.; Chadli, M.; Chaabane, M. Unknown Inputs Observer for a Class of Nonlinear Uncertain Systems: An LMI Approach. Int. J. Autom. Comput. 2012, 9, 331–336. [Google Scholar] [CrossRef]
- Hassani, H.; Zarei, J.; Chadli, M.; Qiu, J. Unknown Input Observer Design for Interval Type-2 T–S Fuzzy Systems with Immeasurable Premise Variables. IEEE Trans. Cybern. 2016, 47, 2639–2650. [Google Scholar] [CrossRef] [PubMed]
- Eure, K.; Quach, C.; Vazquez, S.; Hogge, E.; Hill, B. An Application of UAV Attitude Estimation Using a Low Cost Inertial Navigation System. NASA Tech. Rep. 2013, 1, 5–7. [Google Scholar]
- Huang, S. Understanding Extended Kalman Filter. One Dimens. Kalman Filter 2010, 1, 1–9. [Google Scholar]
- Chao, H.; Coopmans, C.; Di, L.; Chen, Y.U. A Comparative Evaluation of Low-Cost IMUs for Unmanned Autonomous Systems. In Proceedings of the IEEE Conference on Multisensor Fusion and Integration, Salt Lake City, UT, USA, 5–7 September 2010; Volume 1, pp. 2–4. [Google Scholar]
- Kandath, H.; Pushpangathan, J.V.; Bera, T.; Dhall, S.; Bhat, M.S. Modeling and Closed Loop Flight Testing of a Fixed Wing Micro Air Vehicle. Micromachines 2018, 9, 111. [Google Scholar] [CrossRef] [PubMed]
- ArduPilot Dev Team. Extended Kalman Filter Navigation Overview and Tuning. Available online: http://ardupilot.org/dev/docs/extended-kalman-filter.html (accessed on 20 December 2019).
- Qiping, C.; Mulder, B.; Choukroun, D.; Kampen, E.-J.; Visser, C.; Looye, G. Advances in Aerospace Guidance, Navigation and Control; Springer: Berlin/Heidelberg, Germany, 2013; pp. 29–40. ISBN 978-3-642-19817-5. [Google Scholar]
- Lambregts, A.A. Vertical Flight Path and Speed Control Autopilot Design Using Total Energy Principles. Aiaa Guid. Control. Conf. 1983, 1, 1–5. [Google Scholar]
- Lambregts, A.A. Total Energy Based Flight Control System. Patent WO 1984001345, 20 August 1984. [Google Scholar]
- Faleiro, L.F.; Lambregts, A.A. Analysis and tuning of a ’Total Energy Control System’ control law using eigenstructure assignment. Aerosp. Sci. Technol. 1999, 3, 5–9. [Google Scholar] [CrossRef]
- Kelly, J.; Person, L.; Bruce, K. Flight Testing TECS—The Total Energy Control System. In Proceedings of the SAE Aerospace Technology Conference and Exposition, Long Beach, CA, USA, 13–16 October 1986. [Google Scholar]
- Brigido-González, J.D.; Rodríguez-Cortés, H. Experimental Validation of an Adaptive Total Energy Control System Strategy for the Longitudinal Dynamics of a Fixed-Wing Aircraft. J. Aerosp. Eng. 2015, 29, 3–8. [Google Scholar] [CrossRef]
- Jimenez, P.; Agudelo, D.; Cerpa, R.; Zuluaga, E.; Tellez, A. Diseño, análisis y validación de aeronaves no tripuladas multipropósito; Editorial Bonaventuriana: Bogota, Colombia, 2017; pp. 45–75. ISBN 978-958-8928-34-0. [Google Scholar]
- Balmer, G. Modelling and Control of a Fixed-wing UAV for Landings on Mobile Landing Platforms. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2015; pp. 60–71. [Google Scholar]
- Rehan, M.; Tufail, M.; Ahn, C.K.; Chadli, M. Stabilisation of locally Lipschitz non-linear systems under input saturation and quantisation. IET Control. Theory Appl. 2017, 11, 1459–1466. [Google Scholar] [CrossRef]
- Aouaouda, S.; Chadli, M. Robust fault tolerant controller design for Takagi-Sugeno systems under input saturation. Int. J. Syst. Sci. 2019, 50, 1163–1178. [Google Scholar] [CrossRef]
- Ferré, J. El diseño factorial completo 2k. Técnicas de Laboratorio 2004, 292, 430–434. [Google Scholar]
- Jimenez, P.; Agudelo, D. Validation and Calibration of a High-Resolution Sensor in Unmanned Aerial Vehicles for Producing Images in the IR Range Utilizable in Precision Agriculture. In Proceedings of the AIAA SciTech Forum (Infotech @ Aerospace SciTech), Kissimmee, FL, USA, 5–9 January 2015; pp. 734–749. [Google Scholar]
- Lai, Y.C.; Ting, W. Design and Implementation of an Optimal Energy Control System for Fixed-Wing Unmanned Aerial Vehicles. Appl. Sci. 2016, 6, 369. [Google Scholar] [CrossRef]
- Cook, M. Flight Dynamics Principles, 3rd ed.; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Pawełek, A.; Lichota, P.; Dalmau, R.; Prats, X. Fuel-Efficient Trajectories Traffic Synchronization. J. Aircr. 2019, 56, 481–492. [Google Scholar] [CrossRef]
- Bruce, K.R. NASA B737 Flight Test Results of the Total Energy Control System. In Proceedings of the Astrodynamics Conference, Williamsburg, VA, USA, 18–20 August 1986. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Jang, J.S.; Liccardo, C. Small UAV automation using MEMS. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 30–34. [Google Scholar] [CrossRef]
- Bryan, G.; Hartley, G. Stability in aviation: An introduction to dynamical stability as applied to the motions of aeroplanes. Nature 1912, 88, 406–407. [Google Scholar] [CrossRef][Green Version]
- Lichota, P. Inclusion of the D-optimality in multisine manoeuvre design for aircraft parameter estimation. J. Theor. Appl. Mech. 2016, 54, 87–98. [Google Scholar] [CrossRef]
- Agudelo, D.; Lichota, P. A Priori Model Inclusion in the Multisine Maneuver Design. In Proceedings of the 17th IEEE International Carpathian Control Conference (ICCC), Tatranska Lomnica, Slovakia, 29 May–1 June 2016; pp. 440–445. [Google Scholar]
- Pamadi, B.N. Performance, Stability, Dynamics, and Control of Airplanes; American Institute of Aeronautics and Astronautics: Hampton, VA, USA, 2004; ISBN 978-156-3475-83-2. [Google Scholar]
- Segui, M.; Kuitche, M.; Botez, R. Longitudinal Aerodynamic Coefficients of Hydra Technologies UAS-S4 from Geometrical Data. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, Grapevine, TX, USA, 9–13 January 2017; pp. 2–4. [Google Scholar] [CrossRef]
- Dorobantu, A.; Murch, A.; Mettler, B.; Balas, G. System Identification for Small, Low-Cost, Fixed-Wing Unmanned Aircraft. J. Aircr. 2013, 50, 1117–1130. [Google Scholar] [CrossRef]
- Tucker, A.; Balas, G. Safety, Efficacy, and Efficiency: Design of Experiments in Flight Test. In 56th Annual Society of Experimental Test Pilots Symposium; The Society of Experimental Test Pilots: Lancaster, CA, USA, 2012; pp. 2–10. [Google Scholar]
- Hartley, R.; Hugon, F.; Anderson, R.; Moncayo, H. Development and Flight Testing of a Model Based Autopilot Library for a Low Cost Unmanned Aerial System. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013; pp. 2–8. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | Natural Frequency, rad/s or Time Constant, s | Damping Ratio |
|---|---|---|
| Phugoid | 0.3671 rad/s | 0.6142 |
| Short period subsidence mode 1 | 0.0297 s | - |
| Short period subsidence mode 2 | 0.0963 s | - |
| Spiral | 20.8768 s | - |
| Dutch roll | 4.0796 rad/s | 0.9796 |
| Roll | 0.0913 s | - |
| Property | Value | Unit |
|---|---|---|
| Mass m | 4.95 | kg |
| Wing span b | 2.045 | m |
| Mean aerodynamic chord | 0.38 | m |
| Wing area S | 0.76 | m2 |
| Moment of inertia | 0.3175 | kg m2 |
| Moment of inertia | 0.3493 | kg m2 |
| Moment of inertia | 0.5931 | kg m2 |
| Moment of inertia | 0.002593 | kg m2 |
| Parameter | Value |
|---|---|
| Airfield location | Bogota, Colombia |
| Runway altitude | 2570 m a.s.l |
| Runway length | 300 m |
| Runway width | 30 m |
| Latitude/Longitude | 4.8240903 deg/−74.1560519 deg |
| Runway heading | 314°–134° |
| Parameter | Symbol | Unit |
|---|---|---|
| Time | t | s |
| Relative altitude | h | m |
| Airspeed | m/s | |
| Ground speed | m/s | |
| Wind speed | m/s | |
| Wind direction | B | deg |
| Vertical speed | m/s | |
| Battery remaining | % | |
| Battery voltage | V | |
| Roll angle | deg | |
| Yaw angle | deg | |
| Pitch angle | deg | |
| Roll rate | p | deg/s |
| Yaw rate | r | deg/s |
| Pitch rate | q | deg/s |
| Throttle position | % | |
| Elevator servo | ms |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jimenez, P.; Lichota, P.; Agudelo, D.; Rogowski, K. Experimental Validation of Total Energy Control System for UAVs. Energies 2020, 13, 14. https://doi.org/10.3390/en13010014
Jimenez P, Lichota P, Agudelo D, Rogowski K. Experimental Validation of Total Energy Control System for UAVs. Energies. 2020; 13(1):14. https://doi.org/10.3390/en13010014
Chicago/Turabian StyleJimenez, Pedro, Piotr Lichota, Daniel Agudelo, and Krzysztof Rogowski. 2020. "Experimental Validation of Total Energy Control System for UAVs" Energies 13, no. 1: 14. https://doi.org/10.3390/en13010014
APA StyleJimenez, P., Lichota, P., Agudelo, D., & Rogowski, K. (2020). Experimental Validation of Total Energy Control System for UAVs. Energies, 13(1), 14. https://doi.org/10.3390/en13010014