3.1. Case Study I: IEEE 33-Bus Distribution System
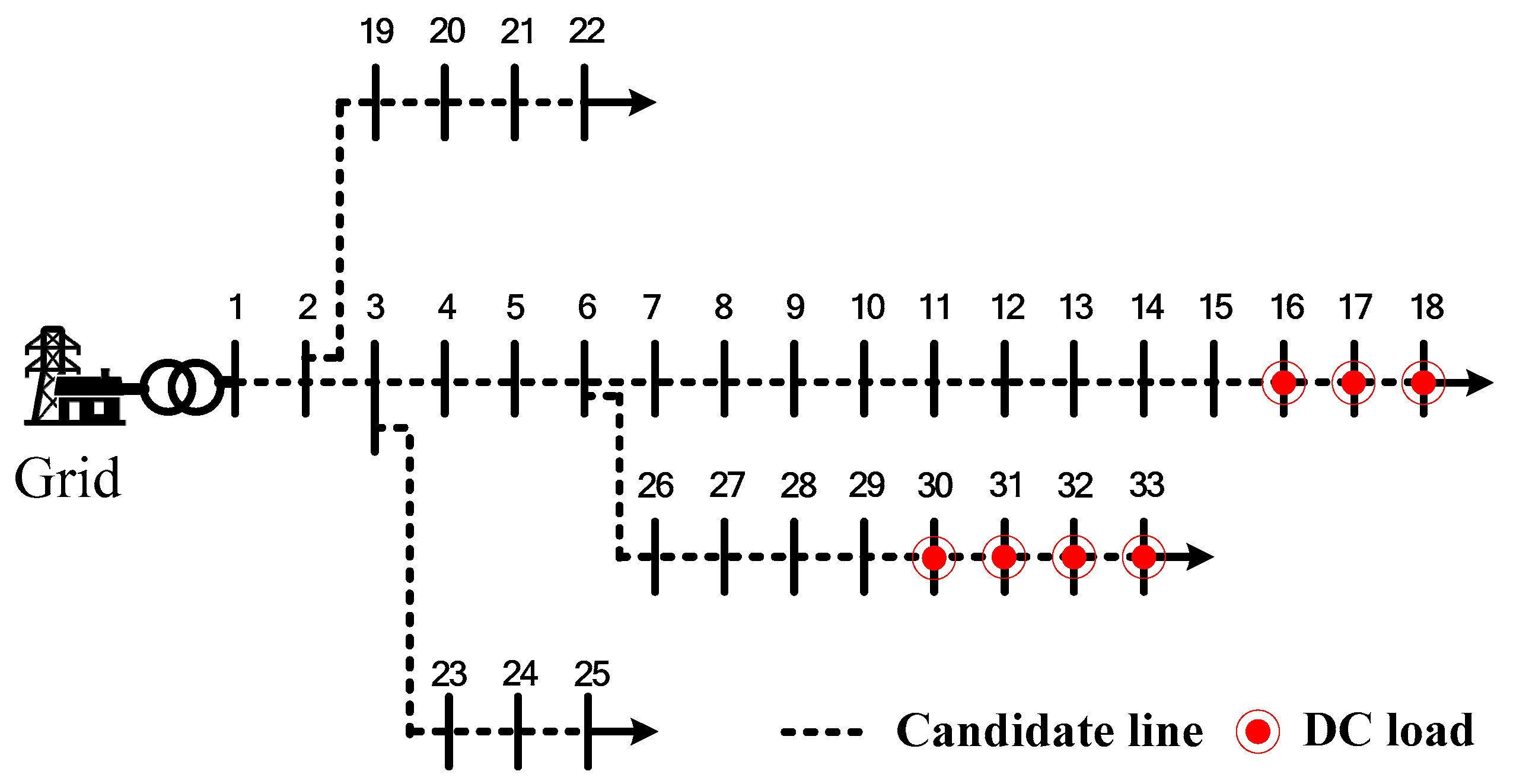
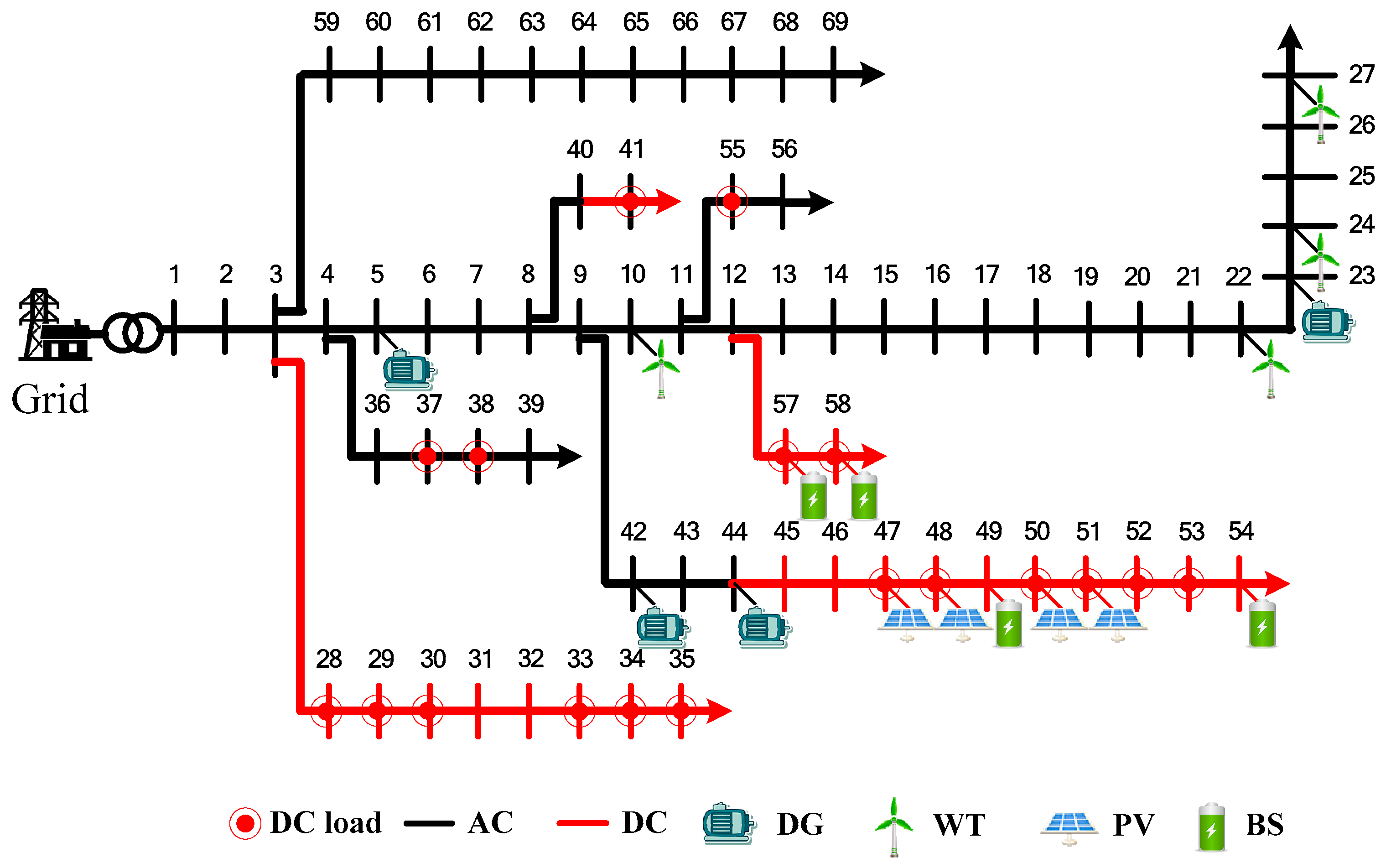
The configuration of the tested MG is shown in
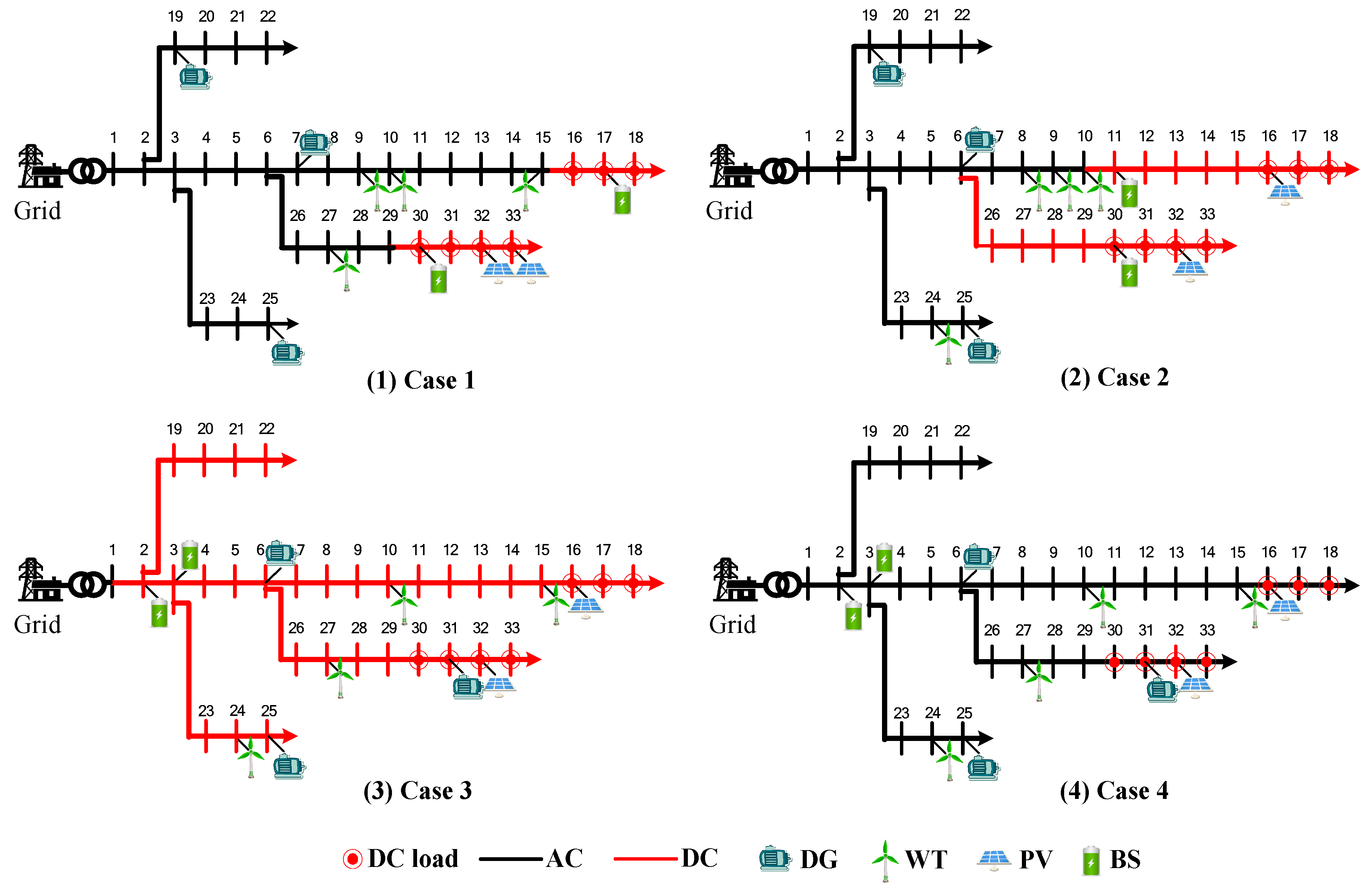
Figure 4, where DC loads are identified by red circles. The peak load of the MG is about 3MW. The candidate DERs include four DGs, four WTs, two PVs, and two BSs. The parameters of these DERs are shown in
Table 1 and
Table 2. The costs of investing converter and distribution lines are given in
Table 3 and
Table 4. These data are mainly adapted from [
31,
32,
33]. Both the charging and discharging efficiencies of BSs are set to be 0.9. In addition, the initial energy level in BSs is set to be a half of their capacity. Daily electricity prices are shown in
Table 5, when the selling price is 0.8 times the buying price. The candidate buses for DER integration are shown in
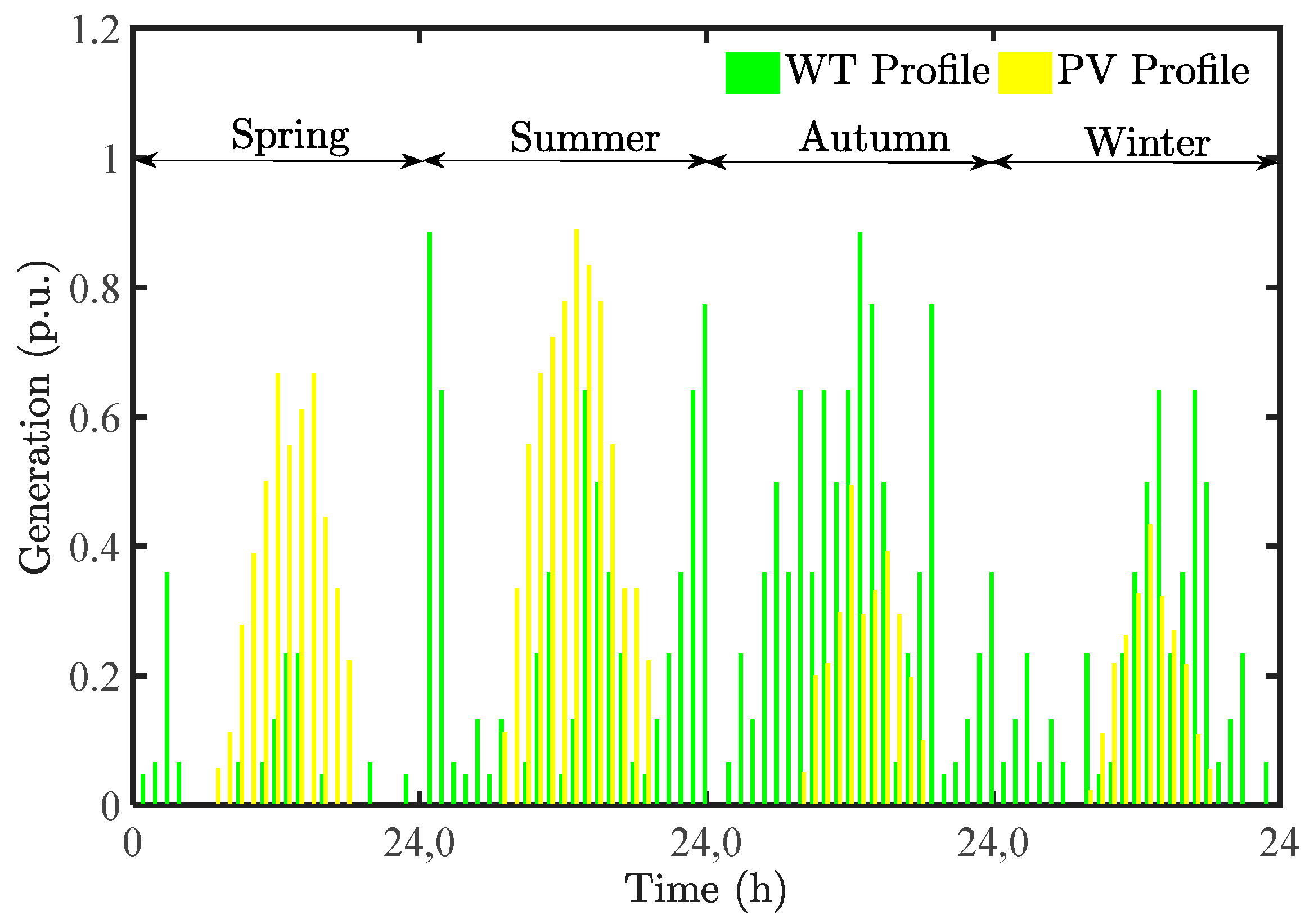
Table 6. Four typical days are selected to represent four seasons of a year. The typical generation profiles of WTs and PVs are shown in
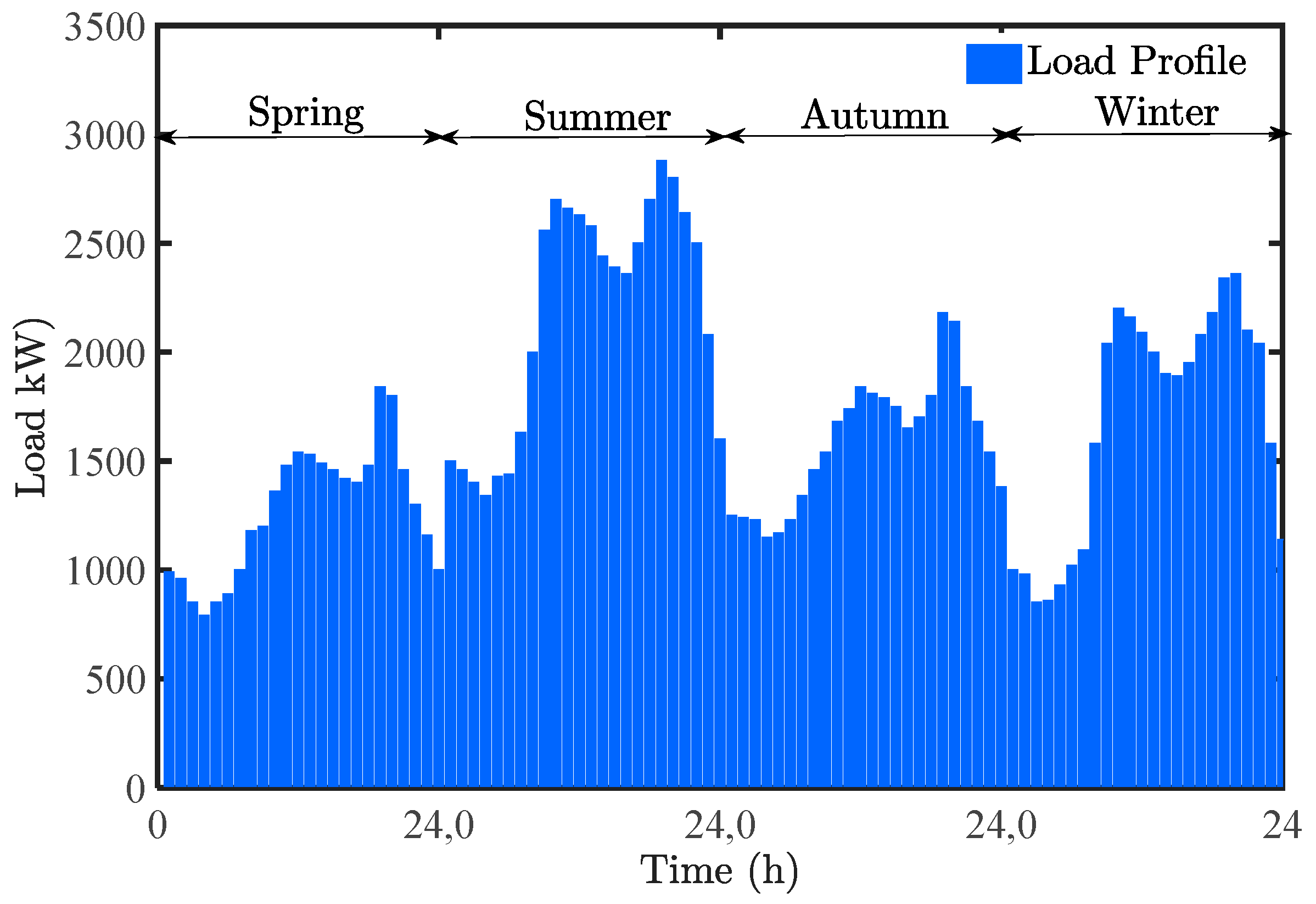
Figure 5, while the typical load profile is shown in
Figure 6.
Four cases are conducted to test the effectiveness of the proposed model:
- Case 1:
Hybrid AC/DC MG planning with the proposed model;
- Case 2:
Hybrid AC/DC MG planning with arbitrary placement of DC feeders;
- Case 3:
Pure DC MG planning;
- Case 4:
Pure AC MG planning;
(1) Case Analysis: Case 1
Case 1 is conducted based on the proposed model. The optimization result finds the number and placement of DERs in the MG. The annual cost and power generation of DERs are shown in
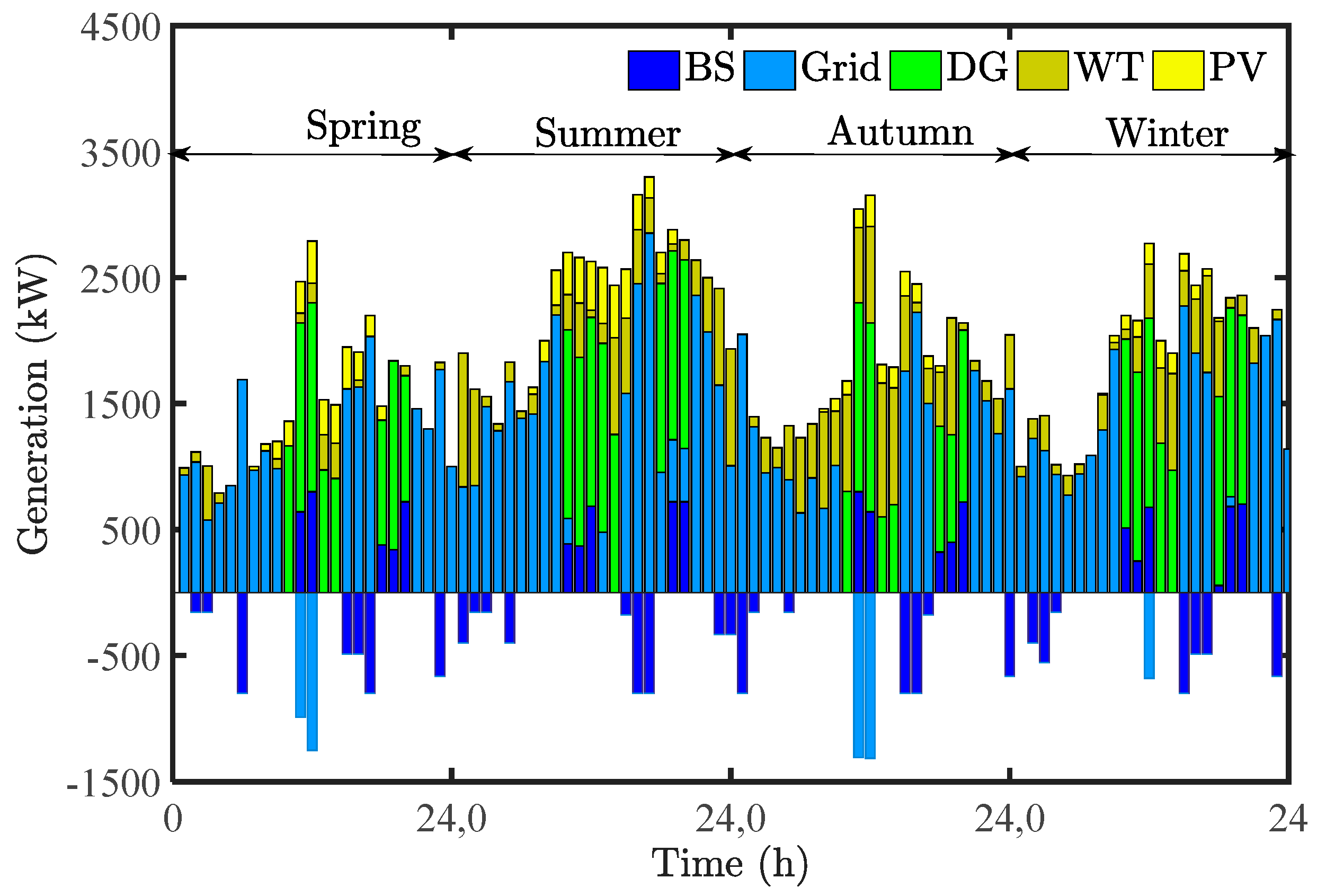
Table 7. The generation schedule of DERs in the typical days is shown in
Figure 7.
DERs including three DGs, two BS, four WTs and two PVs are installed for satisfying the load in the MG. Surplus power generated by renewable energy resources (such as WTs and PVs) is sold to the utility grid.
Table 7 records the detailed cost and power generation of the DERs. It can be easily seen that, the average cost of DGs is higher than that of other DERs, while the average cost of WTs and PVs is much lower than that of other DERs. Three DGs out of the four candidate DGs are installed, although the generation of DGs is not cheap. However, there are some periods (e.g., Peak 1 and Peak 2 hours) during which the local generation of DGs is more economic. In addition, these DGs shoulder the burden of serving the load when the MG is in autonomous mode in cases of faults. As to renewable energy resources, all the candidate WTs and PVs are installed in the MG. This is because the generation of WTs and PVs are cheap. Note that the average cost of WTs is less than that of PVs. On one hand, the unit investment of WTs is less than that of PVs. On the other hand, the annual energy generation amount (605 MWh) of WTs is more than that (390 MWh) of PVs. All the candidate BSs are installed, which is because the volatile electricity prices put BSs in such a favorable position that BSs can take full advantage of electricity price gap to reduce the cost. An interesting phenomenon is that the converter cost of all the DERs is zero due to the fact that all the AC based DERs are installed in the AC system while all the DC based DERs are installed in the DC feeders.
Figure 7 gives the generation schedule of DERs in the MG in the typical days of four seasons. Since the electricity price is low most of the time, the majority of power supply is purchased from the utility grid. During certain high-price periods, power generated from local DERs is even sold to the utility grid to increase the revenue. The generation of WTs and PVs is relatively cheap and therefore WTs and PVs are utilized to generate power to the fullest. The BSs take advantage of the energy price gap to make a profit during the day. As seen in
Figure 7, they charge during off-Peak1/off-Peak 2 hours while discharging during Peak 1/Peak2 hours. Obviously, the schedule demonstrates the economic operation of the DERs.
(2) The Exactness of the Relaxation Technique
The proposed model relaxes the power flow equality constraint into inequality for each line. To test the computational performance of the relaxation technique, we firstly define the maximum relaxation error in the day as the relaxation gap:
The relaxation gap pertinent to each distribution line in Case 1 is tested. The gap of all the lines is very small. We choose several AC and DC distribution lines to illustrate the gap in
Table 8. The maximum gap is 1.21 × 10
−7 which corresponds to line (16,17). Besides, the gap for DC distribution lines tends be larger than that of AC distribution lines. However, the gap is still very small, which verifies the exactness of the relaxation techniques.
(3) Comparison of the Four Cases
To demonstrate the advantage of the proposed model, results of all the four cases are compared. The placement of DERs and the location of DC feeders in the four cases are displayed in
Figure 8, while the detailed annual investment and operation costs are listed in
Table 9.
As can be seen in
Figure 8, two DC feeders are deployed in Case 1. All the DC loads are covered in the DC feeders while all the AC loads are covered in the AC system. Intuitively, this result is conforms to the rule of the economics, which is because the AC/DC network supplying with the same AC/DC type of loads can reduce the number of converters. Similarly, to reduce the number of converters, all the DC based DERs such as PVs and BSs are installed in the DC feeders. While all the AC based DERs such as DGs and WTs are installed in the AC system. In Case 2, two arbitrary DC feeders are formed. Note that all the DC based DERs such as BSs and PVs are installed at DC buses to save the cost of converters. This is similar to Case 1. However, the original AC loads in the DC feeders have to use converters, leading to an additional investment cost. The detailed cost is listed in
Table 9. In Case 3, all the branches and buses are DC based. The DERs are distributed randomly in the network. Any positions make no difference for DERs in this case as long as the network security is guaranteed. In Case 4, all the branches and buses are AC based. This is a conventional AC MG planning problem. The analysis of this case is similar to that of Case 3 and not repeated here.
From
Table 9, the investment and operation costs in the four cases are the same. As we know, the total loads in the MG are the same in the four cases. In fact, from the perspective of energy balance, the capacity of the installed DERs in Case 1 is completely the same as that in Case 2 and Case 4. Therefore, the investment and operation costs in four cases are the same. The total cost in Case 3 is the most among the four cases. This is because most of the loads are AC loads, while the MG is a DC MG. Therefore a lot of converters are needed for AC loads. As can be seen in
Table 9, the load converter cost and feeder converter cost in Case 3 are much higher than those in other cases. It should be noted that DC feeders need only two distribution lines while AC feeders need three distribution lines. The investment cost of distribution lines in Case 3 is the least. Although the DC MG saves a lot in distribution line investment, the saved cost still can’t offset the cost brought by the converters. The total cost in Case 1 is the least among the four cases. This is mainly because the cost of load converters and feeder converters is much less. The DC feeders cover the least AC loads and save a lot of unnecessary converters. From the analysis above, we can conclude that the planning problem is essentially to find an optimal balance between the investment of distribution lines and converters.
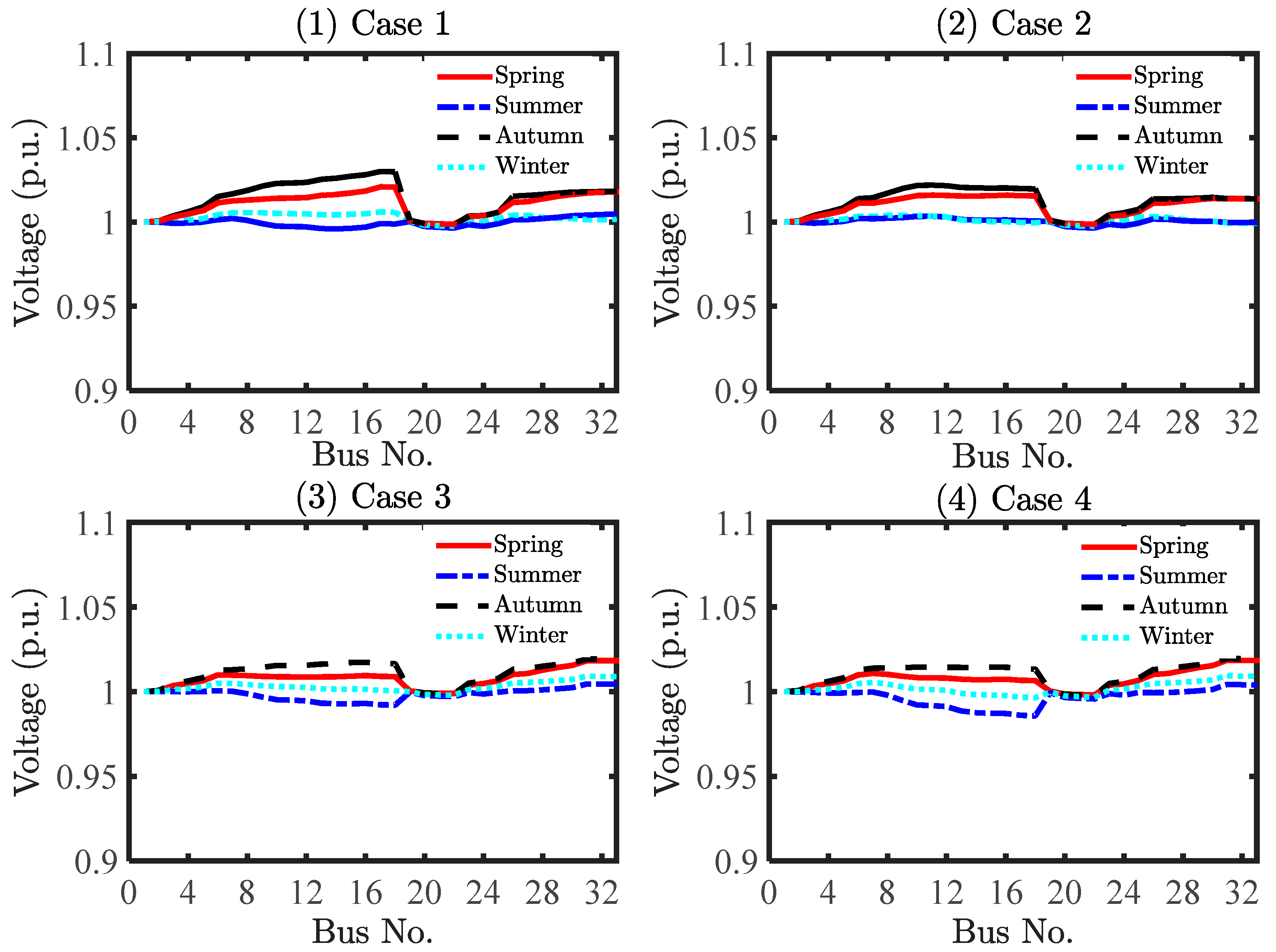
The voltage of the buses at 12:00 when the load level is relatively high in the typical days is shown in
Figure 9. As can be seen, all the voltage is between the safe intervals [0.9, 1.1]. There are some voltage fluctuations between the nodes. This is partly due to the placement of DERs and partly due to the network configuration. Taking bus 17 in Case 1 as an example, the voltage rises rapidly there because of the placement of BSs, which support the voltage by generating power.
Note that the voltage level is higher at bus 17 than that at the root bus 1. This is because the electricity price is high at that time. Many DERs such as DGs and BSs are started up to generate power and sell it to the grid utility to increase the revenue. So the power flow is reversed and flows from the end bus to the root bus. Therefore the voltage is elevated a lot at the end buses. It is interesting to find that the voltage in Case 3 is similar to that of Case 4. This is due to the fact that the placement of DERs in the DC MG and AC MG is the same, as can be seen in
Figure 8. Therefore the voltage support from the DGs is similar. Anyway, the hybrid MG can operate safely in all the situations.
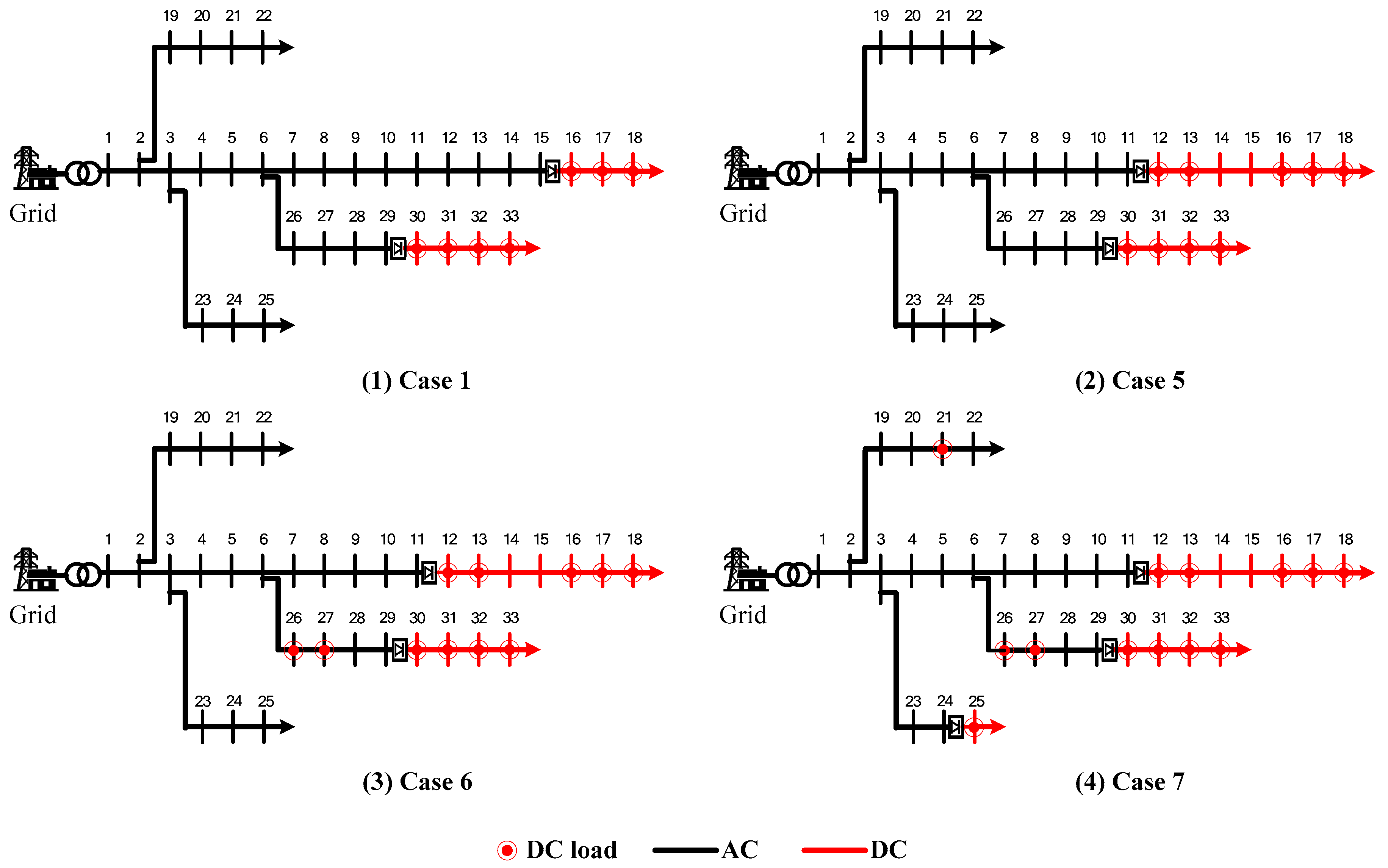
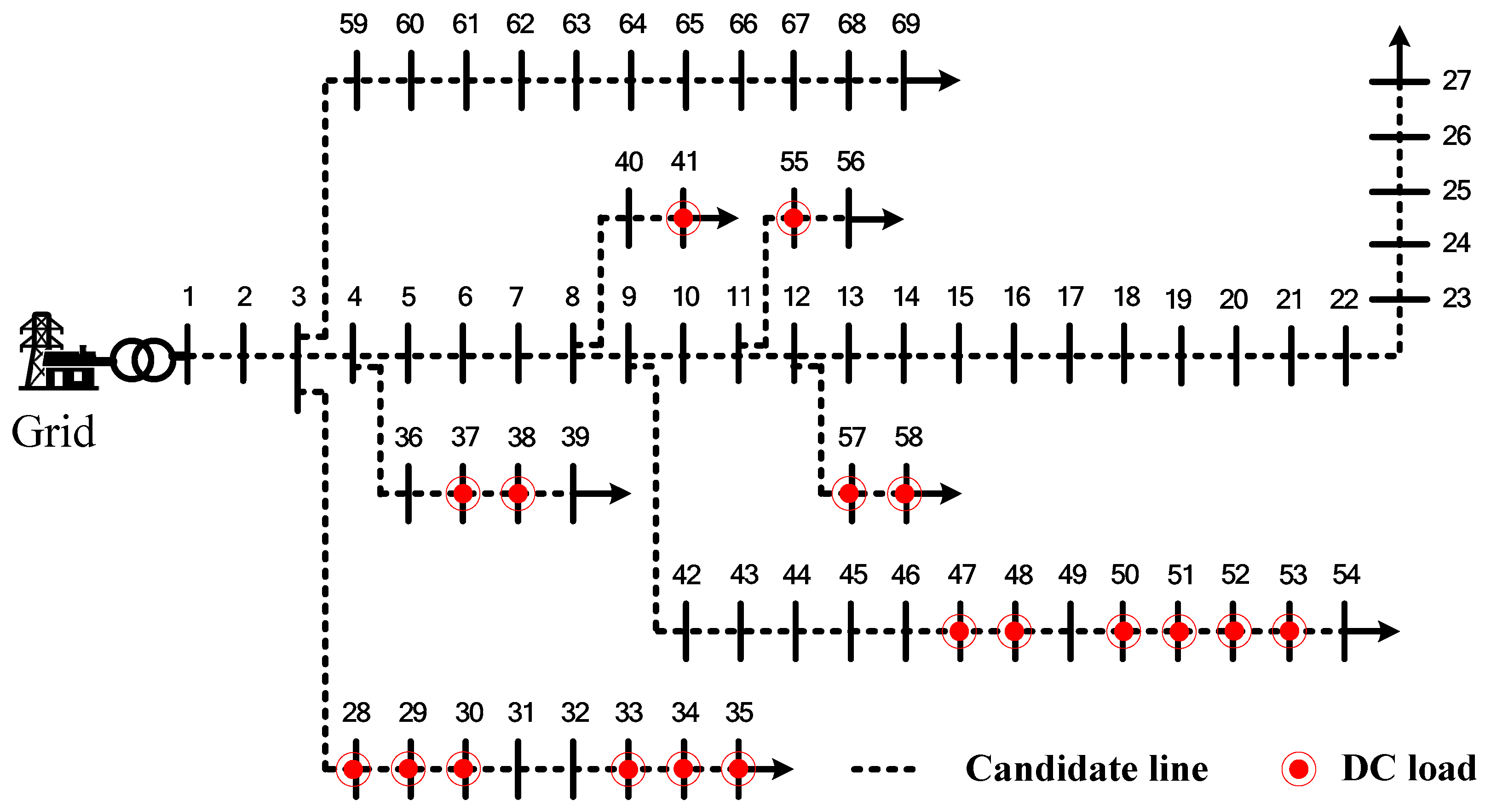
(4) Influence of the Distribution of DC loads
From the analysis of Case 1 to Case 4, we find that if the DC loads lie nearby, then the DC feeders are easily formed to connect those loads in the same network. To further investigate the influence of the distribution of DC loads to the formation of DC feeders, additional cases are carried out. We gradually expand the distribution of the DC loads in Case 5–Case 7. The final placement of DC feeders in each case is show in
Figure 10. In Case 5, two additional loads at bus 12 and 13 are set as DC loads. In this case, the DC feeder starts from bus 11 to connect all the DC loads. This measure not only saves the cost of separate converters for DC loads, but also reduces the investment cost for distribution lines. In Case 6, we further add two DC loads at bus 26 and 27. It’s interesting to find that the two buses are not incorporated into the corresponding DC feeder. This is because the original AC bus 28 and 29 will be integrated into the DC feeder if bus 26 and 27 are incorporated into the DC feeder owing to the continuity of DC feeders. Therefore, additional AC/DC converter fee for AC loads will be charged if the two buses are included in the DC feeder. The increased cost from the AC/DC converters of bus 28 and 29 may exceed the saved cost from converters and distribution lines of the DC feeders. Therefore, the investors would prefer to supply these two DC loads through AC/DC converters in the AC system rather than expanding the DC feeder. We further scatter two DC loads at bus 21 and bus 25, respectively. It is found that bus 25 with the DC load at the terminal of the feeder is set as DC bus while bus 21 is not. This is because the investment cost of distribution lines can be reduced if the bus with DC loads at the terminal of the feeder turns to a DC bus. However, if the bus with DC loads locates at the inner part of the feeder, it’s not necessarily economic to turn to a DC bus.
Above all, the proposed model results in the optimal placement of DC feeders which achieves the tradeoff between the cost charged from AC/DC converters of AC loads and the cost saved from DC/AC converters of DC loads and DC distribution lines. Hence, we can conclude that the proposed method can determine the number and site of DERs in an economic manner. In addition, it can locate the DC feeders of the MG considering the connectivity of DC loads based on their distribution. If there are more DC loads in the network, a longer DC feeder may be more economic. However, if the DC loads are scattered in the network, it would be a more economical way to supply DC loads by deploying a partial set of DC feeders or even no DC feeders.
(5) Comparison of the Performances of the MISOCP and MILP Models
The performances of the proposed MISOCP and MILP models are compared. Since the MISOCP model involves no approximations and it is considered more accurate than the MILP model. In spite of its accuracy, the MISOCP model is time-consuming and the computation consumption reaches up to 370 min. Although the MILP model sacrifices the accuracy of the solution, it can greatly improve the computational efficiency.
As can be seen in
Table 10, the investment cost of the MILP model is completely the same as that of the MISOCP model, and only the operation cost makes difference due to the approximation of power flow. However, the error of the total cost is within 1% if the MISOCP model is used as a benchmark. The total cost tends to be more accurate as
increases. However, the computation time also grows dramatically when
exceeds 6. Therefore, the MISOCP model is preferred if the scale of the MG is small, otherwise the MILP model with a proper parameter
is better.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}