Active Control of Drive Chain Torsional Vibration for DFIG-Based Wind Turbine

Abstract
1. Introduction
2. Modeling of Wind Turbine
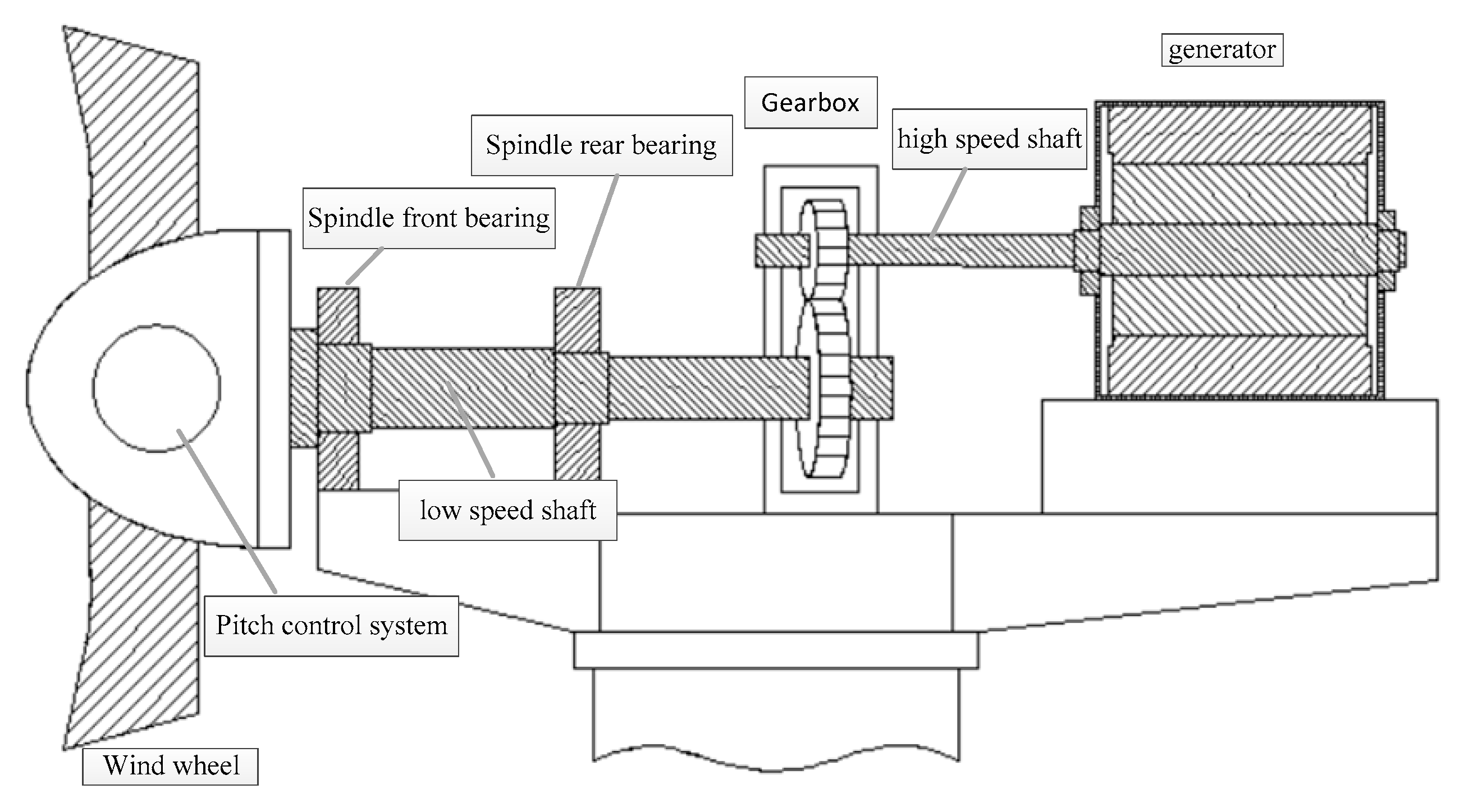
2.1. Structure of Wind Turbine
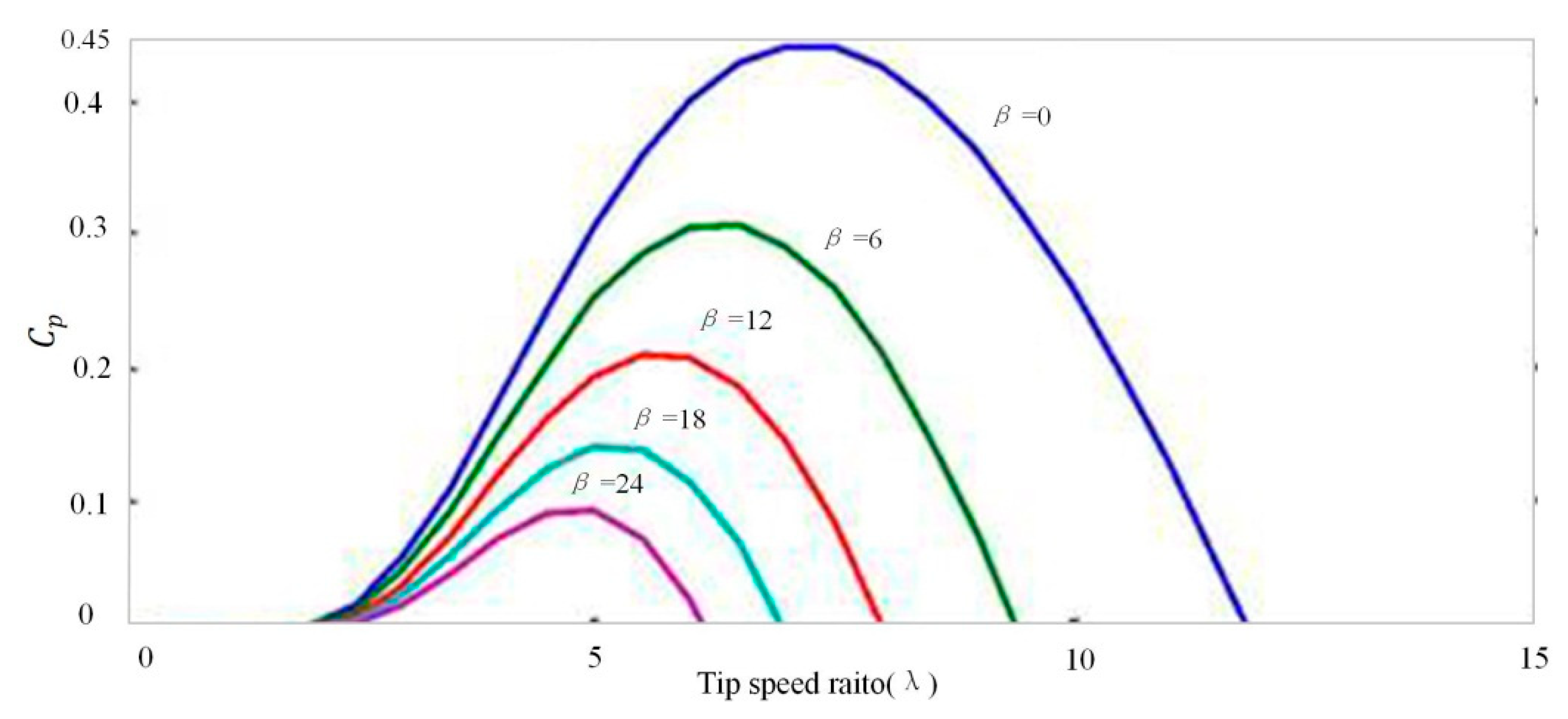
2.2. Modeling of the Wind Wheel
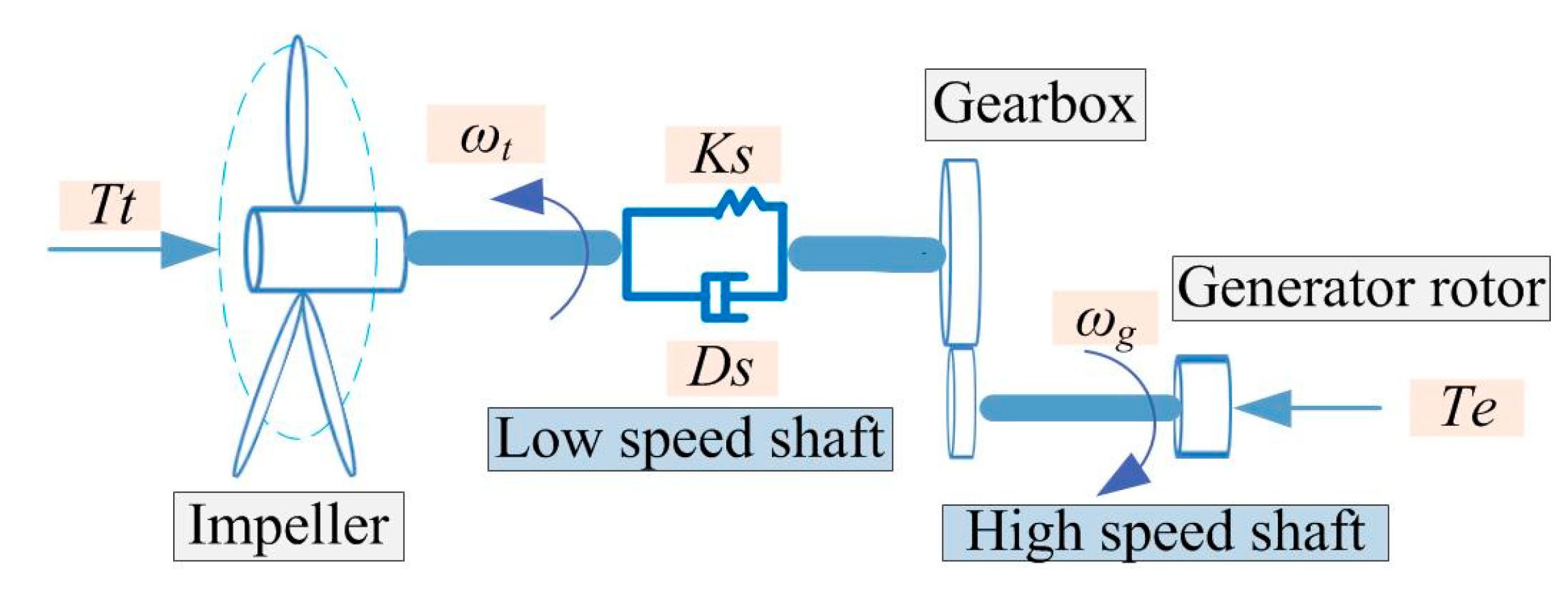
2.3. Drive Train Modeling
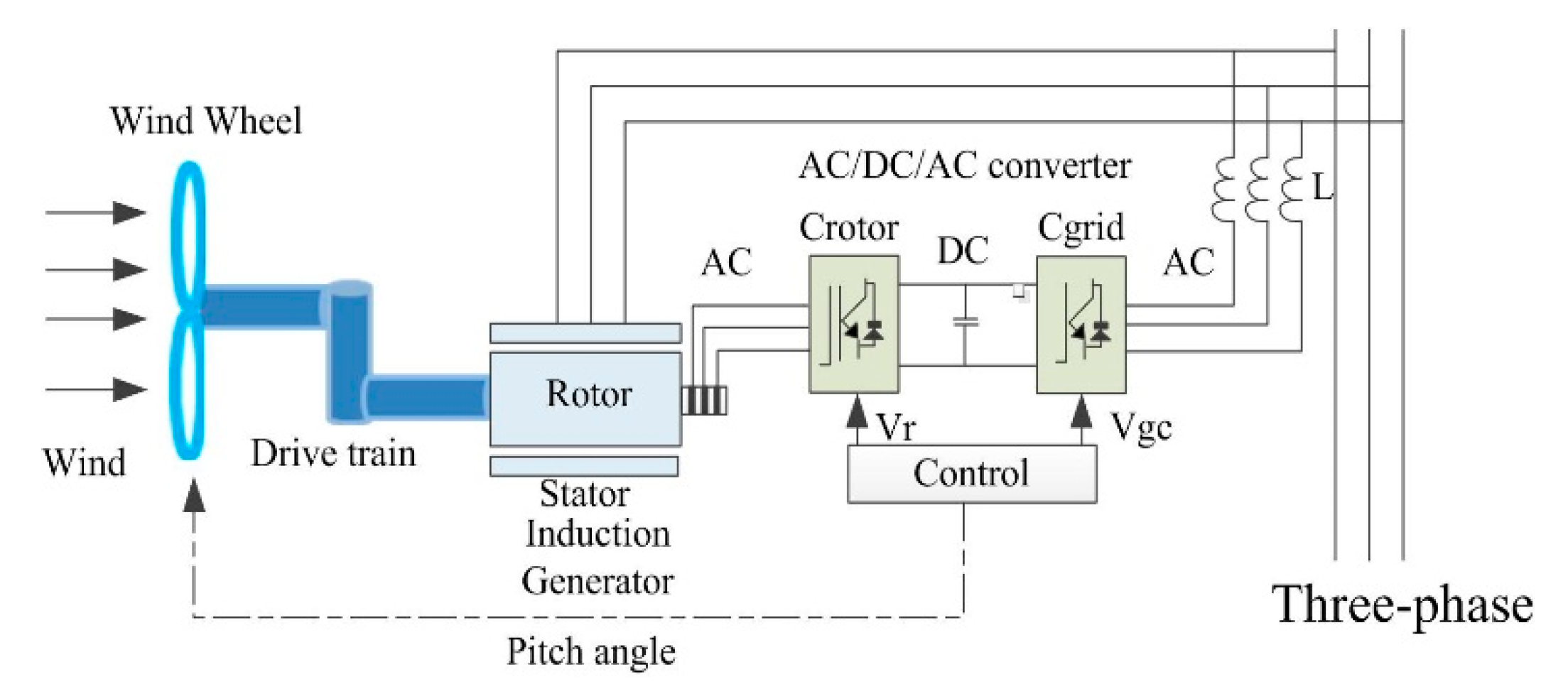
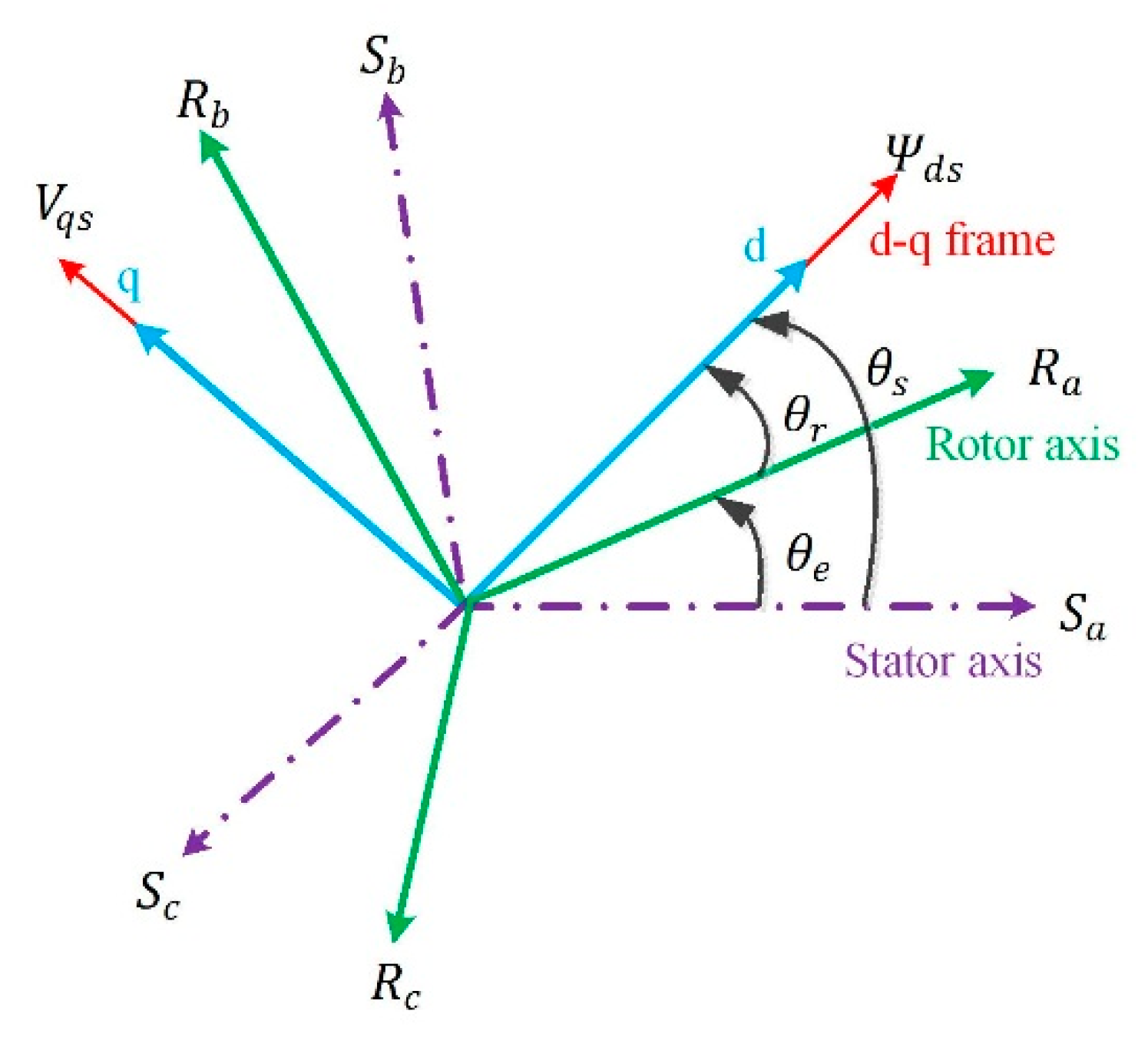
2.4. Dynamic Model of the DFIG
3. Active Control Approach
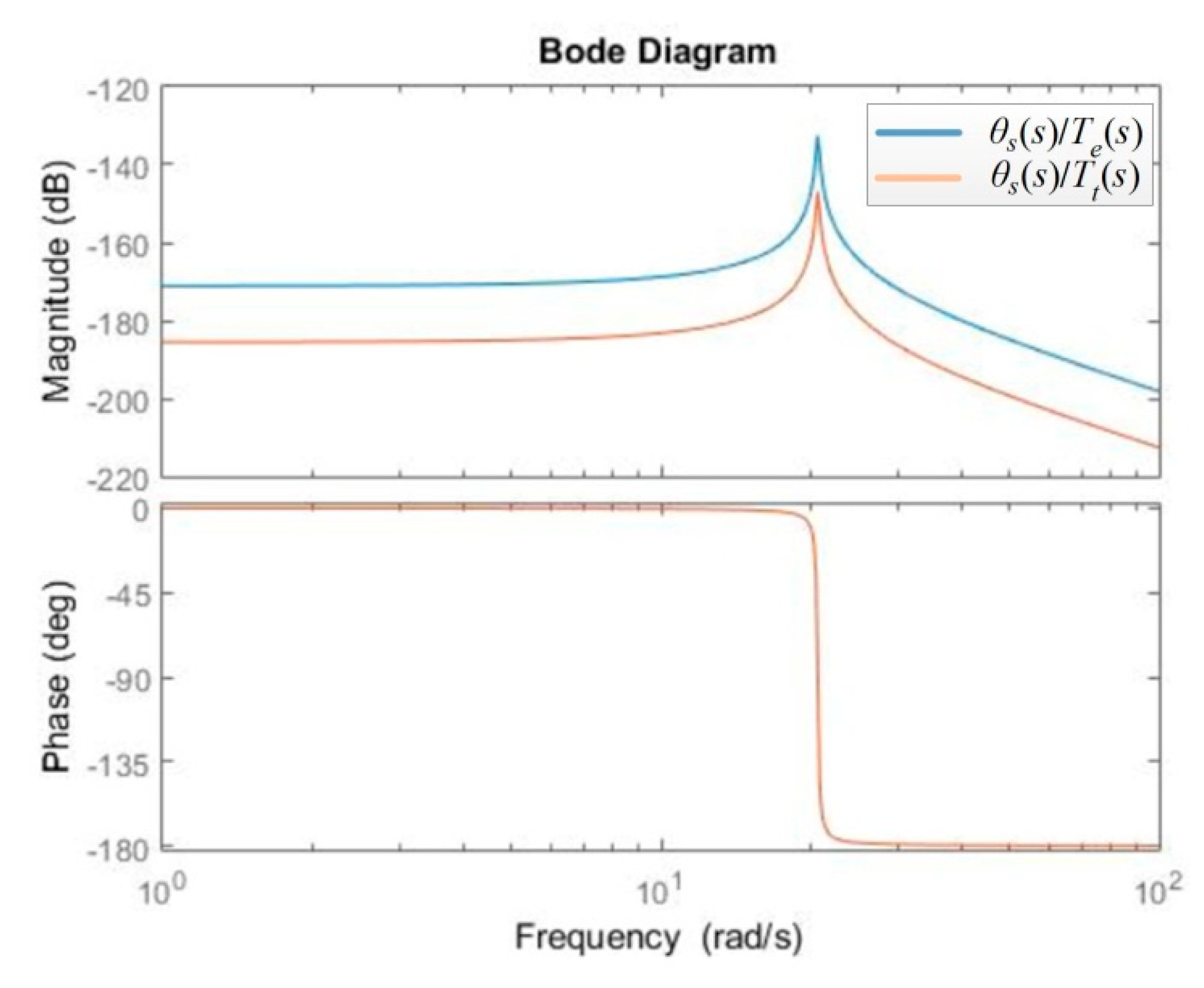
3.1. Characteristic Analysis of Torsional Vibration
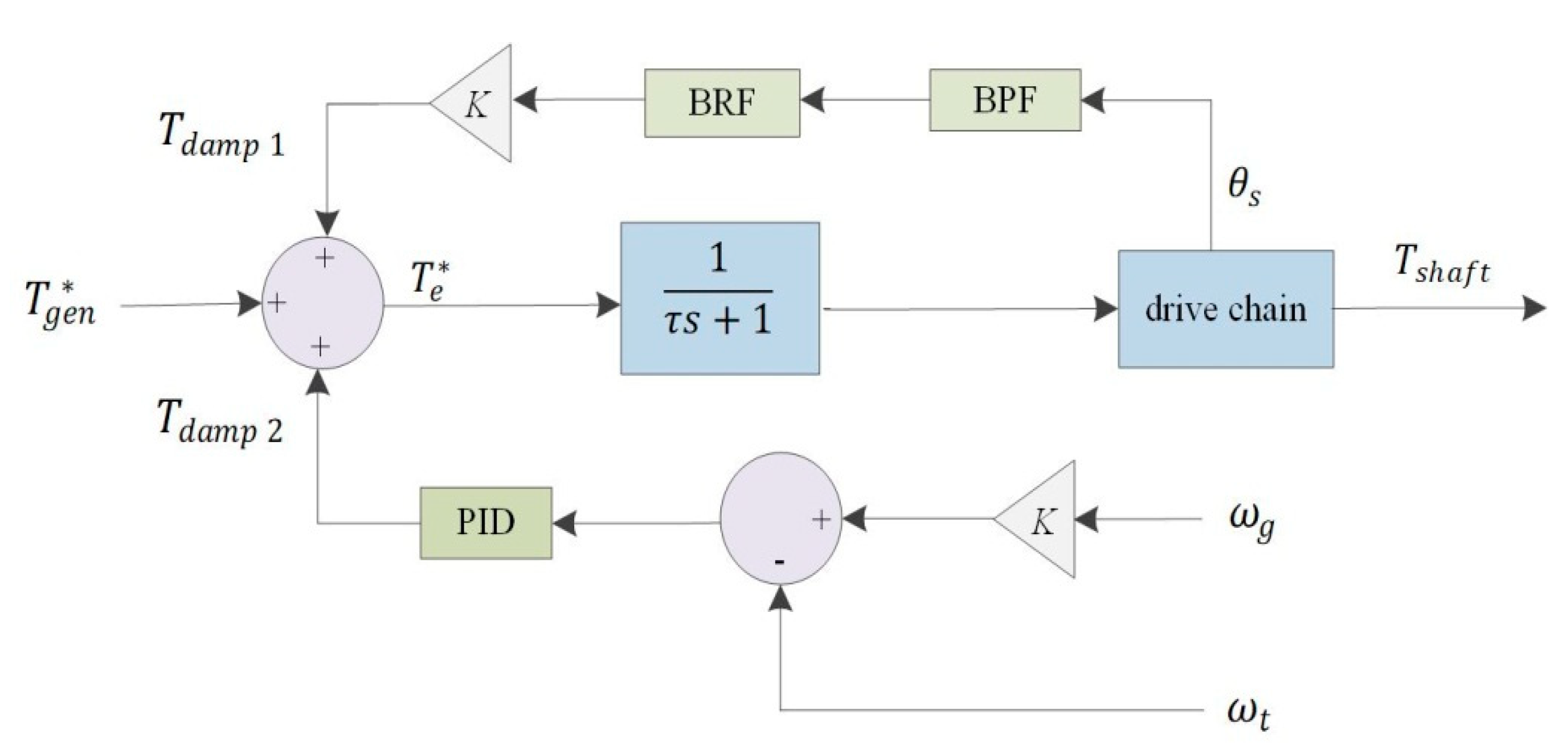
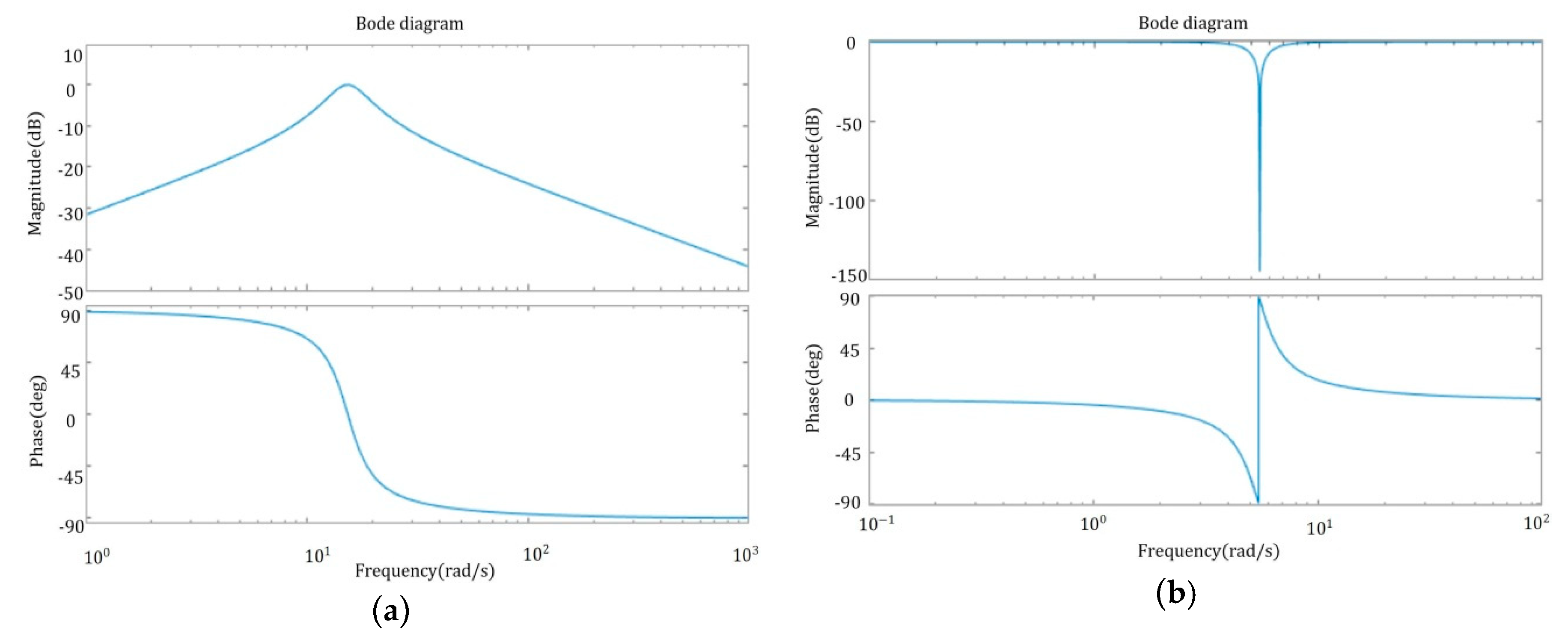
3.2. Control Principle of Drive Chain
4. Simulation Results
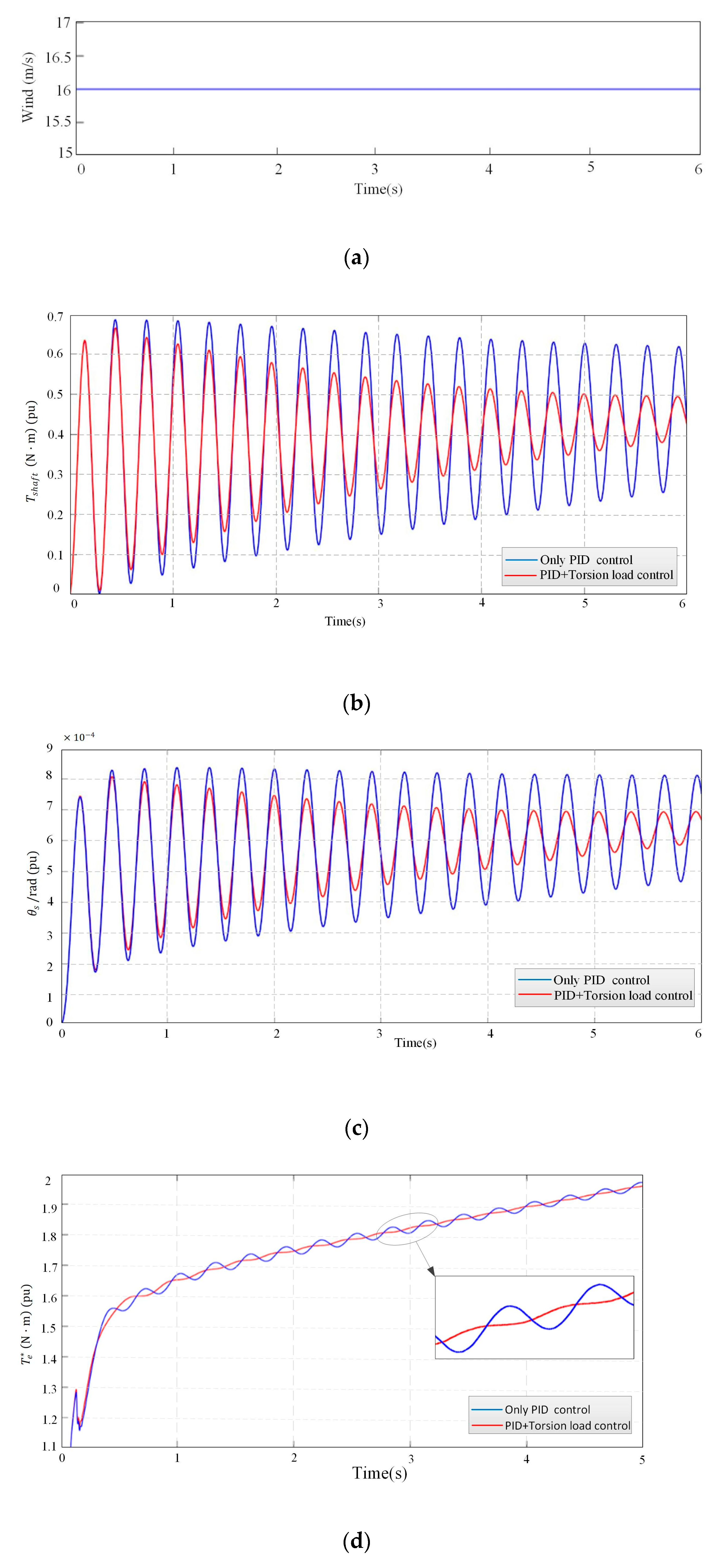
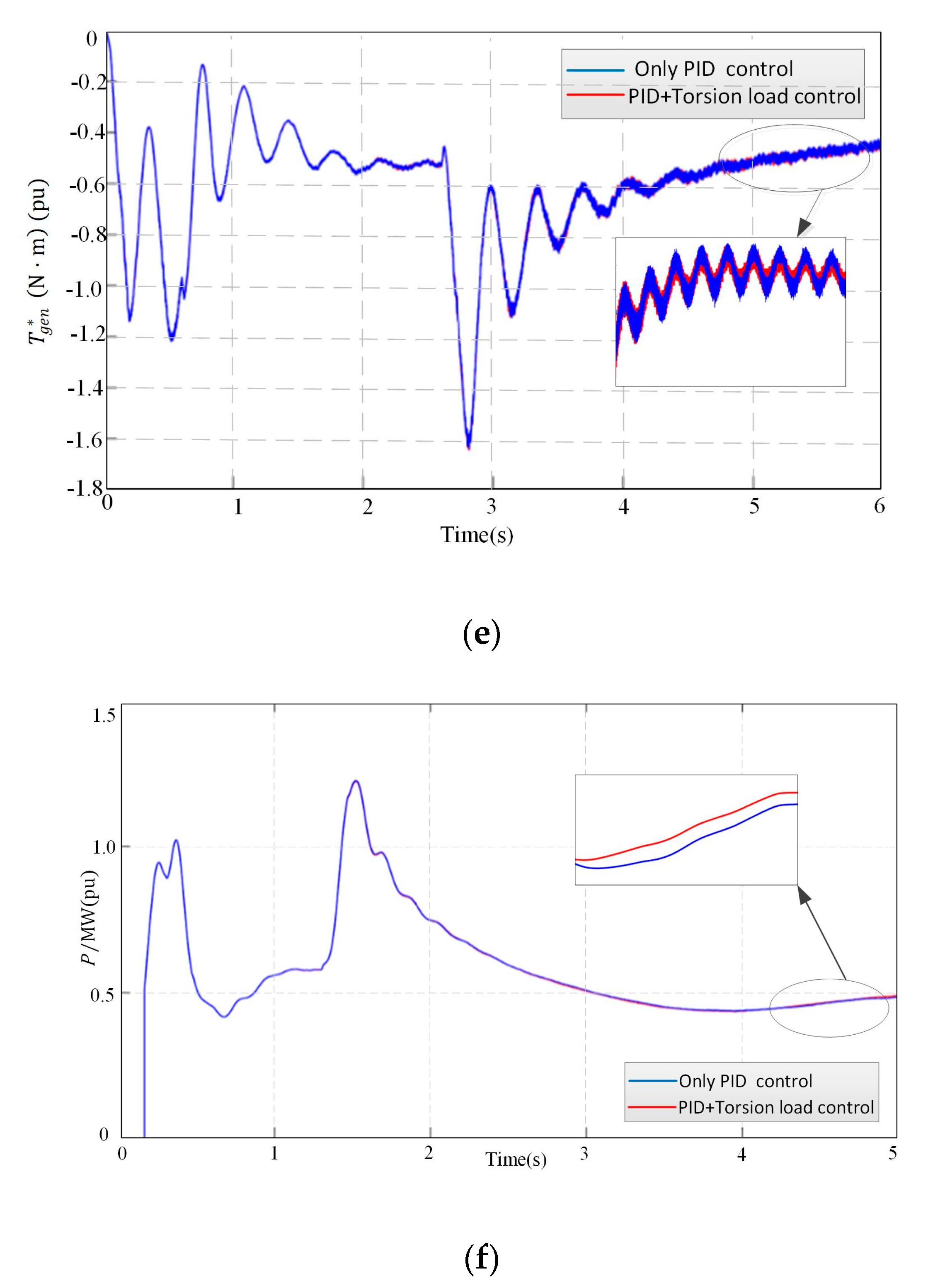
4.1. Simulation and Analysis under Constant Wind Speed (16 m/s)
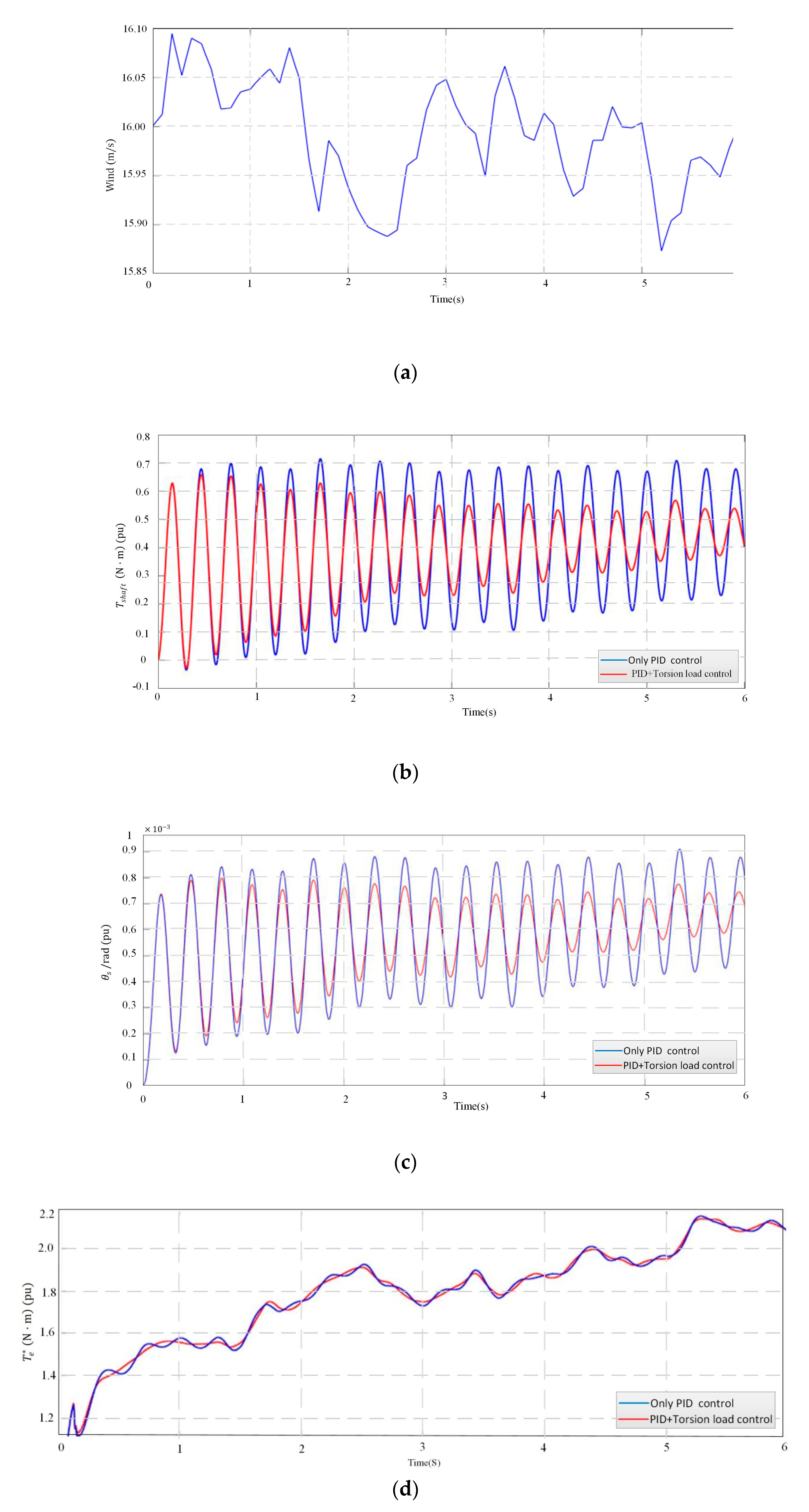
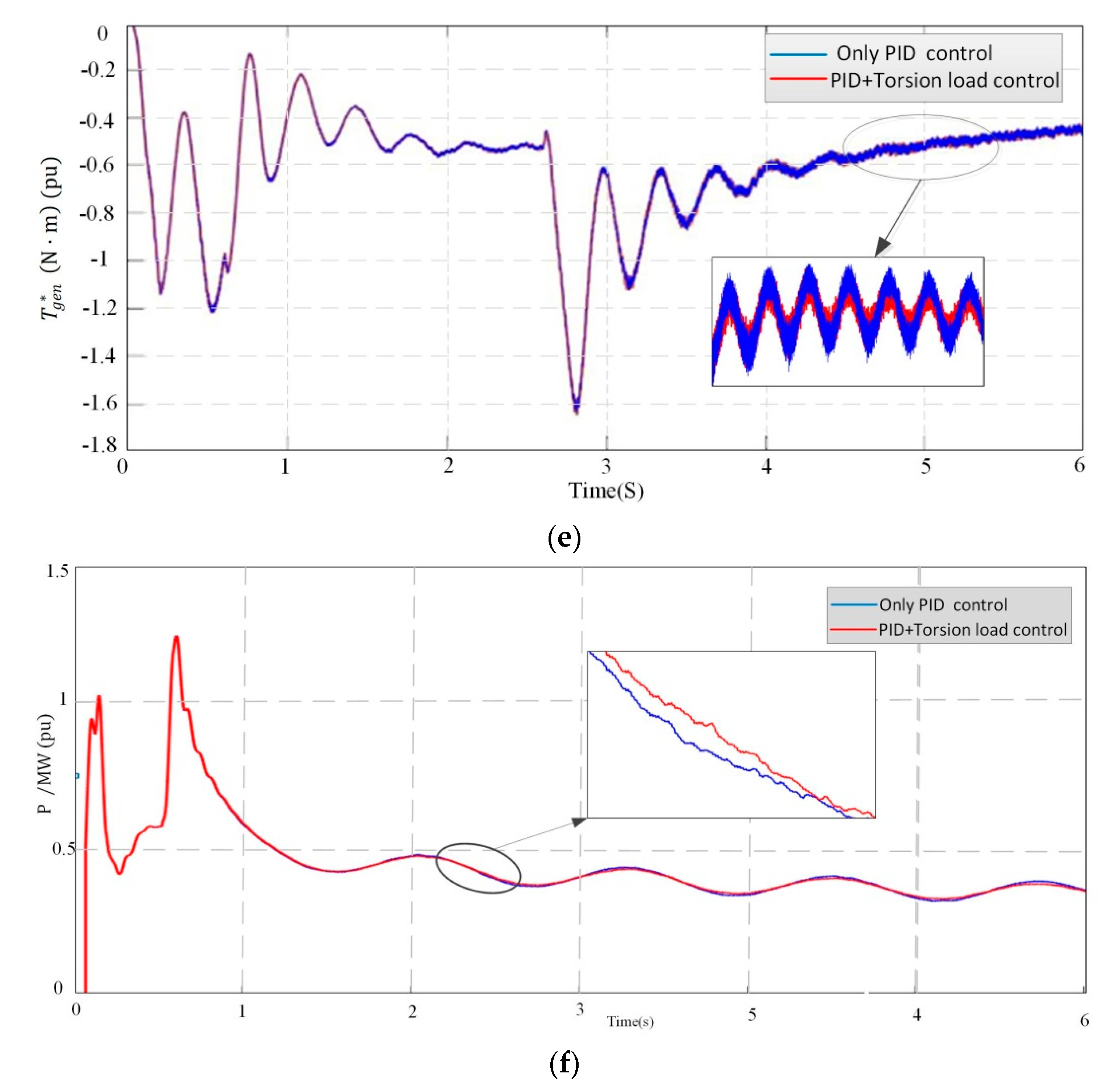
4.2. Simulation and Analysis under Turbulent Wind
4.3. Under Constant Wind Speed (16 m/s) and Turbulent Wind
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Miao, F. Electromechanical Coupling Effect in DFIG-Wind Turbine Active Control for Load Reduction. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2017. (In Chinese). [Google Scholar]
- Ying, D.; Jie, G.; Tian, D.; Zhou, F.; Gao, S.; Zhao, M. Controlling structural vibrations in wind turbines by constructing function V. Sci. China Technol. Sci. 2015, 58, 1186–1195. [Google Scholar]
- Asgari, S.; Yazdizadeh, A. Robust model-based fault diagnosis of mechanical drive train in V47/660? kW wind turbine. Energy Syst. 2017, 9, 921–952. [Google Scholar] [CrossRef]
- Di, Z.; Ouyang, J.; Xiong, X.; Xiao, C.; Li, M. A System Transient Stability Enhancement Control Method Using Doubly Fed Induction Generator Wind Turbine with Considering Its Power Constraints. Energies 2018, 11, 945. [Google Scholar]
- Shen, Y.; Cui, M.; Wang, Q.; Shenm, F.; Zhang, B. Comprehensive Reactive Power Support of DFIG Adapted to Different Depth of Voltage Sags. Energies 2017, 10, 808. [Google Scholar] [CrossRef]
- Fateh, F.; White, W.N.; Grunbacher, D. Torsional Vibrations Mitigation in the Drivetrain of DFIG-based Grid-Connected Wind Turbine. IEEE Trans. Ind. Appl. 2017, 99, 1. [Google Scholar]
- Huang, P.H.; Moursi, M.S.E.; Hasen, S.A. Novel Fault Ride-Through Scheme and Control Strategy for Doubly Fed Induction Generator-Based Wind Turbine. IEEE Trans. Energy Conv. 2015, 30, 635–645. [Google Scholar] [CrossRef]
- Jia, F.; Wang, R.; Li, Z.; Cai, X.; Gao, Q. Torsional vibration suppression of DFIG drive-chain under grid fault. Electr. Power Autom. Equip. 2015, 35. [Google Scholar] [CrossRef]
- Zhao, J.; Lu, X.; Fu, Y.; Hu, X. Dynamic Frequency Control Strategy of Wind/Photovoltaic/Diesel Microgrid Based on DFIG Virtual Inertia Control and Pitch Angle Control. Proc. CSEE 2015, 35, 3815–3822. [Google Scholar]
- Rahimi, M. Improvement of energy conversion efficiency and damping of wind turbine response in grid connected DFIG based wind turbines. Int. J. Electr. Power Energy Syst. 2018, 95, 11–25. [Google Scholar] [CrossRef]
- Jun, L.; Feihang, Z.; Zhao, C.č.; Wang, Z. Mechanism analysis and suppression strategy research on permanent magnet synchronous generator wind turbine torsional vibration. ISA Trans. 2019, 10, 1016. [Google Scholar]
- Mohammadi, E.; Fadaeinedjad, R.; Moschopoulos, G. Implementation of internal model based control and individual pitch control to reduce fatigue loads and tower vibrations in wind turbines. J. Sound Vibr. 2018, 421, 132–152. [Google Scholar] [CrossRef]
- Liu, L.; Xie, D.; Chu, H.; Gu, C. A Damping Method for Torsional Vibrations in a DFIG Wind Turbine System Based on Small-Signal Analysis. Electr. Power Comp. Syst. 2017, 45, 560–573. [Google Scholar] [CrossRef]
- Ying, J.; Yuan, X.; Hu, J.; He, W. Impact of Inertia Control of DFIG-based WT on Electromechanical Oscillation Damping of SG. IEEE Trans. Power Syst. 2018, 33, 1. [Google Scholar] [CrossRef]
- Su, Y. Research on Active Suppression Strategy of Dynamic Load of Double-Fed Wind Turbine Drive Train. Master Thesis, Shenyang University of Technology, Shenyang, China, 2018. (In Chinese). [Google Scholar]
- Yilmaz, A.S.; Özer, Z. Pitch Angle Control in Wind Turbines Above the Rated Wind Speed by Multi-Layer Perceptron and Radial Basis Function Neural Networks. Expert Syst. Appl. 2009, 36, 9767–9775. [Google Scholar] [CrossRef]
- Akhmatov, V. Analysis of Dynamic Behaviour of Electric Power Systems with Large Amount of Wind Power. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2003. [Google Scholar]
- Muyeen, S.M.; Hasanali, M.; Rion, T.; Murata, T.; Tamura, J. Damping of Blade-shaft Torsional Oscillations of Wind Turbine Generator System. Electr. Mach. Power Syst. 2008, 36, 17. [Google Scholar] [CrossRef]
- Slootweg, J.G.; Polinder, H.; Kling, W.L. Representing Wind Turbine Electrical Generating Systems in Fundamental Frequency Simulations. IEEE Trans. Energy Conv. 2003, 18, 516–524. [Google Scholar] [CrossRef]
- Ping, D. Research on Active Control of Totsional Vibration in Wind Turbine Drive Train. Master Thesis, North China Electric Power University, Beijing, China, 2017. (In Chinese). [Google Scholar]
- Ponce, P.; Ponce, H.; Molina, A. Doubly fed induction generator (DFIG) wind turbine controlled by artificial organic networks. Soft Comput. 2018, 22, 2867–2879. [Google Scholar] [CrossRef]
- Kasmieh, T. Adaptive stator flux estimator for the induction machine Direct Torque Control. In Proceedings of the International Symposium on Power Electronics, Ischia, Italy, 11–13 June 2008. [Google Scholar]
- Andreas, P.; Lennart, H.; Torbjorn, T. Evaluation of current control methods for wind turbines using double-fed induction machines. IEEE Trans. Power Electr. 2005, 20, 227–235. [Google Scholar]
- Tapia, A.; Tapia, G.; Ostolaza, J.; Saenz, J. Modeling and control of a wind turbine driven doubly fed induction generator. IEEE Trans. Energy Conv. 2003, 18, 194–204. [Google Scholar] [CrossRef]
- Bedoud, K.; Ali-Rachedi, M.; Bahi, T.; Lakel, R.; Grid, A. Robust Control of Doubly Fed Induction Generator for Wind Turbine Under Sub-Synchronous Operation Mode. Energy Procedia 2015, 74, 886–899. [Google Scholar] [CrossRef]
- Luu, T.; Nasiri, A. Power Smoothing of Doubly Fed Induction Generator for Wind Turbine Using Ultra capacitors. In Proceedings of the IEEE Transactions IECON 2010 36th Annual Conference, Glendale, AZ, USA, 7–10 November 2010; pp. 3293–3298. [Google Scholar]
- Altun, H.; Sünter, S. Modeling, simulation and control of wind turbine driven doubly-fed induction generator with matrix converter on the rotor side. Electr. Eng. 2013, 95, 157–170. [Google Scholar] [CrossRef]
- Hu, J.; Hao, Y.; Yuan, X. Modeling of DFIG-Based WTs for Small-Signal Stability Analysis in DVC Timescale in Power Electronics Dominated Power Systems. IEEE Trans. Energy Conv. 2017, 99. [Google Scholar] [CrossRef]
- Derugo, P.; Szabat, K. Damping of torsional vibrations of two-mass system using adaptive low computational cost fuzzy PID controller. In Proceedings of the 11th International Conference on Power Electronics and Drive Systems, Sydney, Australia, 3–12 June 2015. [Google Scholar] [CrossRef]
- Yang, C. Active Control Strategies and Characteristics of Dynamic Loads of Wind Turbine Generator Systems. Ph.D. Thesis, Chongqing University, Chongqing, China, 2015. (In Chinese). [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C1 | C2 | C3 | C4 | C5 | C6 | C7 | C8 | C9 |
|---|---|---|---|---|---|---|---|---|
| 0.73 | 151 | 0.58 | 0.002 | 2.14 | 13.2 | 18.4 | −0.02 | −0.003 |
| Category | Value |
|---|---|
| Type of Wind Turbines | Doubly-fed wind turbine |
| Rated power | 1.5 MW |
| Number of blades | 3.0 |
| Rated speed | 18.0 r/min |
| Wind wheel diameter | 70.0 m |
| Power regulation | Variable pitch angle and speed |
| Cutting into the wind | 3.5 m/s |
| Cutting out the wind | 25.0 m/s |
| Rated wind speed | 16.0 m/s |
| Category | Value |
|---|---|
| Wind wheel moment of inertia (Jt) | 4.45 × 106 kg·m2 |
| Generator moment of inertia (Jg) | 8.45 × 105 kg·m2 |
| Damping of drive chain (Ds) | 1.72 × 105 N·m/rad |
| Stiffness of drive chain (Ks) | 3.03 × 108 N·m/rad |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Tian, S.; Zhang, Y.; Li, H.; Lu, M. Active Control of Drive Chain Torsional Vibration for DFIG-Based Wind Turbine. Energies 2019, 12, 1744. https://doi.org/10.3390/en12091744
Li Z, Tian S, Zhang Y, Li H, Lu M. Active Control of Drive Chain Torsional Vibration for DFIG-Based Wind Turbine. Energies. 2019; 12(9):1744. https://doi.org/10.3390/en12091744
Chicago/Turabian StyleLi, Zhongyi, Shiji Tian, Yefei Zhang, Hui Li, and Min Lu. 2019. "Active Control of Drive Chain Torsional Vibration for DFIG-Based Wind Turbine" Energies 12, no. 9: 1744. https://doi.org/10.3390/en12091744
APA StyleLi, Z., Tian, S., Zhang, Y., Li, H., & Lu, M. (2019). Active Control of Drive Chain Torsional Vibration for DFIG-Based Wind Turbine. Energies, 12(9), 1744. https://doi.org/10.3390/en12091744