1. Introduction
Recently, the fast development of electronics products, such as solar energies, uninterruptible power supplies (UPS), and electric automobiles have been witnessed [
1,
2,
3]. DC-DC converters has been wildly applied to these applications. However, due to a low and varying input voltage of these applications, the boost converter is a convenient solution for step-up conversion. However, it is difficult for the conventional converter to provide such a high direct-current (DC) voltage gain. Moreover, many power devices of boost converters suffer from overlarge stress at a high output voltage level, leading to decreased efficiency [
4].
Some scholars have strived to increase steady voltage gain and efficiency of boost converters. Some structures, such as the cascaded structure or switched-capacitor [
5,
6,
7] can extend the steady voltage gain at a low cost. However, with the increase of voltage gain, more stages are adopted, leading to a complex circuit and significant current ripple [
8]. In some isolated converters [
9,
10], much high-voltage conversion ratios can be achieved at a relatively low-duty cycle, but the leakage inductor of the magnetic elements may give rise to high voltage spikes and inevitable energy decreases. Furthermore, the volume and weight of power transformers are obstacles for a compact converter. A quadratic boost converter with a single switch can also boost the voltage gain with few components [
11]. However, most previous converters may suffer from too much voltage stress, leading to reduced the conversion efficiency. The soft switch techniques [
12] can recycle the leakage energy of magnetic elements, but at the price of increasing topology complexity. A voltage multiplier cell is a selectable option [
13], which can not only alleviate voltage stress, but also improve the voltage gain.
A control strategy is indispensable to stabilize DC-DC converters against external disturbances. Many classical linear control methods which may achieve mediocre performance cannot even guarantee the stability, owing to the strong nonlinear property of boost converters. Therefore, some nonlinear control strategies, such as neural network control, adaptive control, and sliding mode control (SMC) [
14,
15,
16] have been applied to it. The switch operation on the sliding mode surface of SMC is similar to the two operation states of the DC-DC converter (switch “ON” and “Off”) so that SMC is inherently appropriate to DC-DC converters. Moreover, SMC has characteristics of strong robustness and easy implementation, which is why SMC has generally been used on DC-DC converters. In earlier research, a hysteresis was adopted to relieve chattering and reduce switching frequency [
17]. However, the variational switching frequency still exists, which may induce power losses and the electromagnetic interference (EMI) problem. To avoid this disadvantage, a fixed frequency SMC had been proposed [
18,
19] that can provide a constant operation frequency against external disturbances.
One disadvantage of the lineal sliding mode control is that the system can only converge to the equilibrium points asymptotically, leading to an infinite convergence time theoretically. Afterwards, a terminal sliding mode (TSM) control characterized by a nonlinear sliding mode was developed to guarantee finite-time convergence [
20]. It can speed up the convergence rate near the equilibrium point, bringing about improved transient performance. However, this TSM control method cannot deliver a fast convergence speed when the system states have a distance from the equilibrium point. To ensure fast transient convergence in whole state space, a fast terminal sliding mode (FTSM) control was adopted [
21]. The FTSM control ensures fast transient convergence in a whole convergence process. However, the previous TSM and FTSM methods may both endure a singularity problem. A few methods have been investigated to overcome this difficulty. One approach is the so-called two-phase control strategy. The trajectory was transferred to a specific region where no singularity occurs. Another approach is to add a saturation function to limit the amplitude of singularity term [
22]. It should be noticed that these methods need an extra procedure to eliminate the singularity. In this paper, a novel nonsingular fast terminal sliding mode (NFTSM) is proposed without any additional procedures to avoid the singularity problem.
Also in this paper, a new high step-up converter with voltage multiplier is firstly addressed. This scheme is based on a combination of the quadratic boost converter with the voltage multiplier. Secondly, a novel finite-time NFTSM controller is designed for this converter. Finally, the new NFTSM controller is applied onto the proposed converter. Numerical simulations and experiments are provided to illustrate the effectiveness of the novel converter and controller. The arrangement of this paper is given as follows: the operation principle is introduced in
Section 2;
Section 3 discusses performance and key parameters; the NFTSM controller is designed and analysed in
Section 4; the experimental results are introduced in
Section 5; then,
Section 6 concludes this paper.
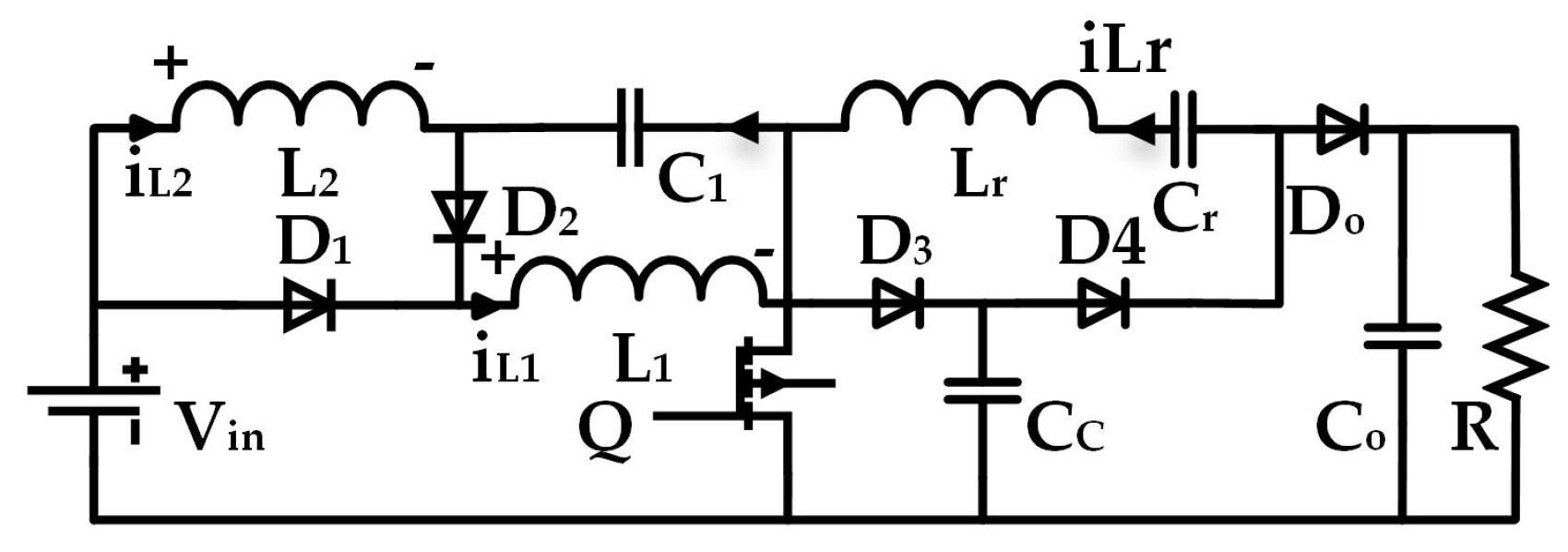
Notations. Throughout this paper, Q is a switch; , are input inductors, and is a resonant inductor; , , , are capacitors; , , , , are diodes; and R is a load, respectively. denotes the voltage of across corresponding element; for example, represents the input voltage, and , , , , stand for the voltages across of , , , , . Analogously, symbolise the current flowing through the corresponding element; for example, , , , , represent the current flowing through , , , , . , , , , denote the current flowing through the switch, and , , , respectively. represents the input voltage source, and denotes the driving signal of the switch (Q), especially.
4. Improved Finite Time Fast Terminal Sliding Mode
Many typical TSM and FTSM can be described as:
where
,
,
,
a is formed of
, and
p,
q,
,
are both positive odd integers satisfying
,
, respectively.
It is evident that TSM
accelerates the convergence rate within the vicinity of the equilibrium point and the state trajectory converges the sliding surface in finite time, owing to the non-linearly term
. However, TSM also offers a relatively slow convergence rate when the system trajectory stays at a distance from the equilibrium point. Based on (42), it can be concluded that the dynamics are globally finite-time stable, and it reaches the steady state within the time:
In FTSM,
guarantees the convergence rate when the system dynamic is far away from the equilibrium point. Moreover,
determines finite time convergence when the system state trajectory is close to the equilibrium point. Thus, the dynamic converges quickly in the whole convergence process, and converges to an equilibrium point within the time:
where
represents the
Hypergeometric Function [
25], and the coefficients of
,
a,
,
attract
to keep convergent.
In order to accelerate the convergence rate further, an improved NFTSM scheme was proposed as follows:
where
,
,
,
b,
c are also formed of
,
respectively.
,
,
,
are both positive odd integers satisfying
,
,
. It is concluded that the system will arrive at the equilibrium point, and the convergence time is given by:
From the above equation, it is observed that the convergence time of is shorter than and because of the extra item, .
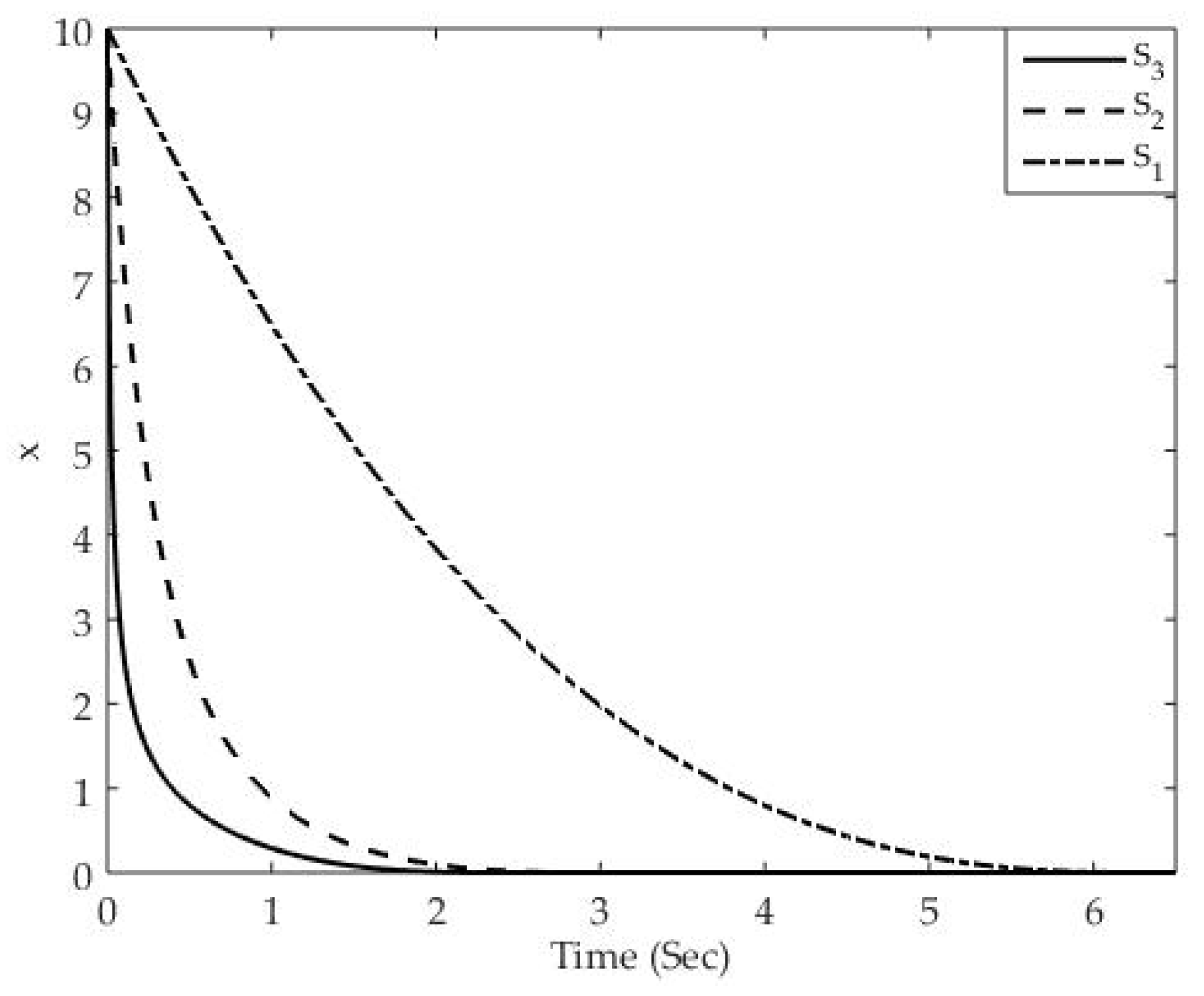
There is a convergence performance comparison between TSM, FTSM, and the improved NFTSM. The following sliding modes are considered:
with the initial value
. The corresponding response curves are given by
Figure 5. It can be seen that the improved NFTSM (
) has a faster convergence rate than FTSM (
) and TSM (
).
5. Controller Design of DC-DC Converter
Now, consider the dynamical system (45), according to the scheme of NFTSM, the switching surface is defined as follows:
For the proposed converter with a single switch, a general control law satisfying the hitting condition can be plotted as:
To guarantee that the system state stays within the vicinity of the sliding surface, the existence condition derived from Lyapunov’s direct method must be obeyed:
where
is the time derivative of
, and is shown as follows:
Substituting (56) into (55) gives the following existence condition:
every coefficient must be satisfied by (57), considering the minimum of the load.
To overcome a variable switching frequency of this system suffering external disturbance, an equivalent sliding mode control with constant operation frequency is adopted.
Equating
yields the equivalent control input:
To improve the transient response, an exponential reaching law is chosen, and can be expressed as:
where
,
are positive parameters.
When (60) is solved for
u, the control input can be obtained as:
Finally, the control input u and ramp signal with a constant frequency were fed into a pulse-width modulator to produce the practical control input. Thanks to u, the system converged quickly to an equilibrium point within a finite time. It should be noted that no singularity exists during the whole process, owing to .
Theorem 1. For the system (45), when the control input is chosen as (61), the system trajectory will then converge quickly to a steady state within a finite time.
Proof of Theorem 1. Consider the Lyapunov function candidate as:
whose time derivative is
It can be seen that when
,
, the system state will slide to the sliding mode
within a finite time. When
, by substituting (61) into the second equation of (45), one can obtain:
Equation (
64) can be rewritten as:
This equation indicates that for and for . Therefore, the system trajectory will continue moving to an equilibrium point instead of staying on the state of and . Moreover, it can be assumed that there exists a vicinity of , , ( is a positive constant) and satisfying for and for , respectively. Therefore, the crossing of trajectories between two boundaries of is achieved in a finite time, and the trajectory from the region reach the boundaries in finite time too. It can be summarized that the system controlled by (61) can converge to from any initial state within a finite time. This completes the proof. □
6. Experimental Results
To illustrate the effectiveness of the previous theoretical analysis, a laboratory prototype of the proposed converter was built and experimented. The related parameters of this system are shown in
Table 2.
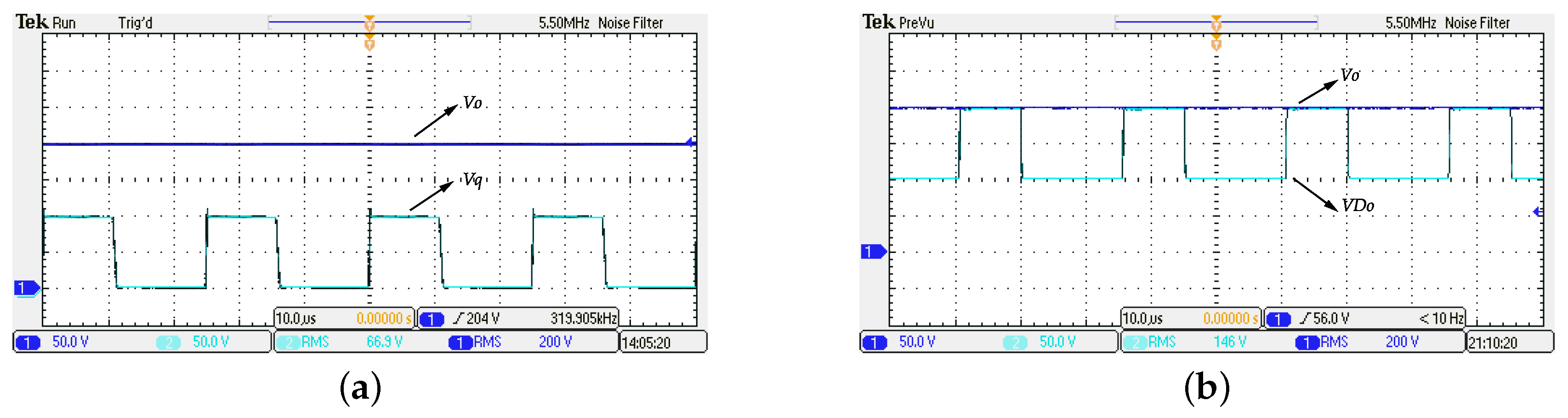
Figure 6 shows the voltage waveforms across the switch and output diode (
), respectively when the output voltage is at 200 V. From (a), it shows that the voltage of the switch equals to 100 V at the “OFF” state, with a small voltage spike about 10 V at the moment when the switch turned off. The subgraph (b) shows that the anode voltage of the output diode (
) to the ground reaches 100 V at the reversed state when the cathode voltage is at 200 V with no voltage spike. One can see that the voltage stress of the output diode arrives at 100 V equalling to half of the output voltage too. Therefore, the voltage stresses of the output diode and switch have been alleviated.
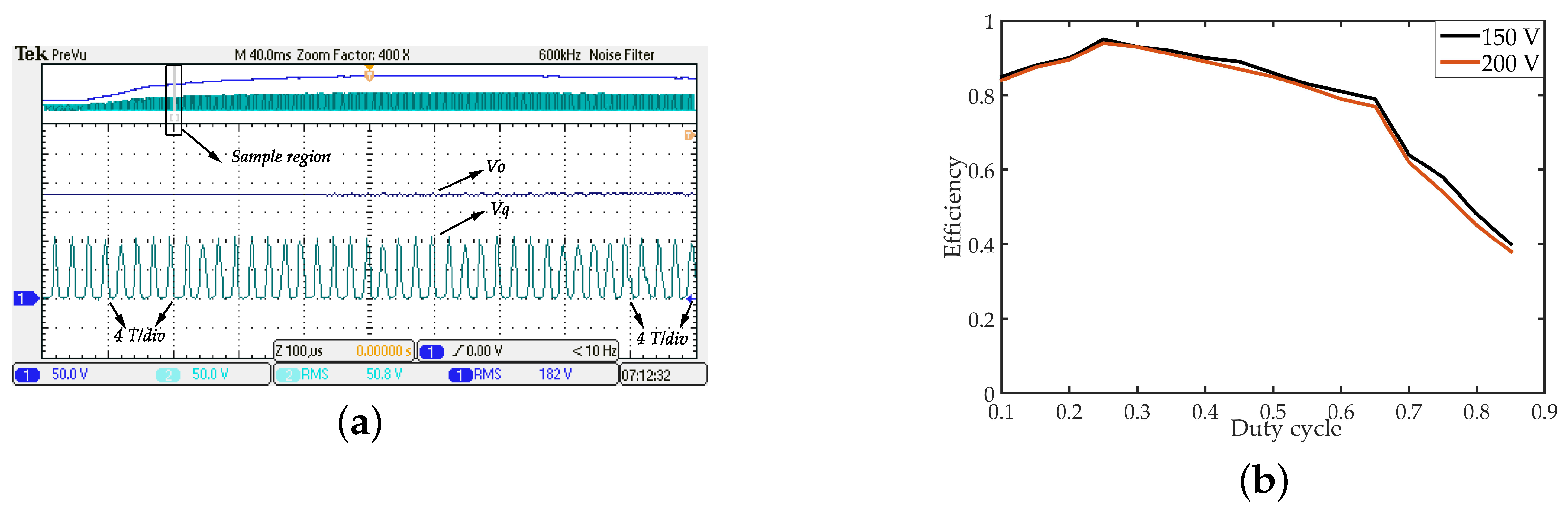
Figure 7a indicates that the switching waveform maintains about four periods in a grid that represents 100
s against a variational output voltage. One can see that the equivalent control (
u) keeps the switching period constant, at about 25
s.
The efficiency versus a wide range of duty cycle and output voltage is plotted in
Figure 7b. It shows that the peak efficiency reaches 95% at
,
V. The efficiency reduces with the increase of the duty cycle, due to an increasing duty cycle accompanied by a more severe conduction loss of the switch and reverse loss of diodes. In addition, the efficiency, at a 150 V output voltage, only has a small advantage than when the output voltage is 200 V, meaning that the output voltage also has a slight impact on the efficiency. This is because the improved output voltage aggravates the heat loss of inductors and capacitors.
An experiment was also carried out for the performance analysis of the proposed NFTSM controller. The result is given in
Figure 8,
Figure 9 and
Figure 10. The startup transient response is shown in
Figure 8, the output voltage against input voltage variation plots in
Figure 9, and the output voltage versus load disturbance is illustrated in
Figure 10, respectively.
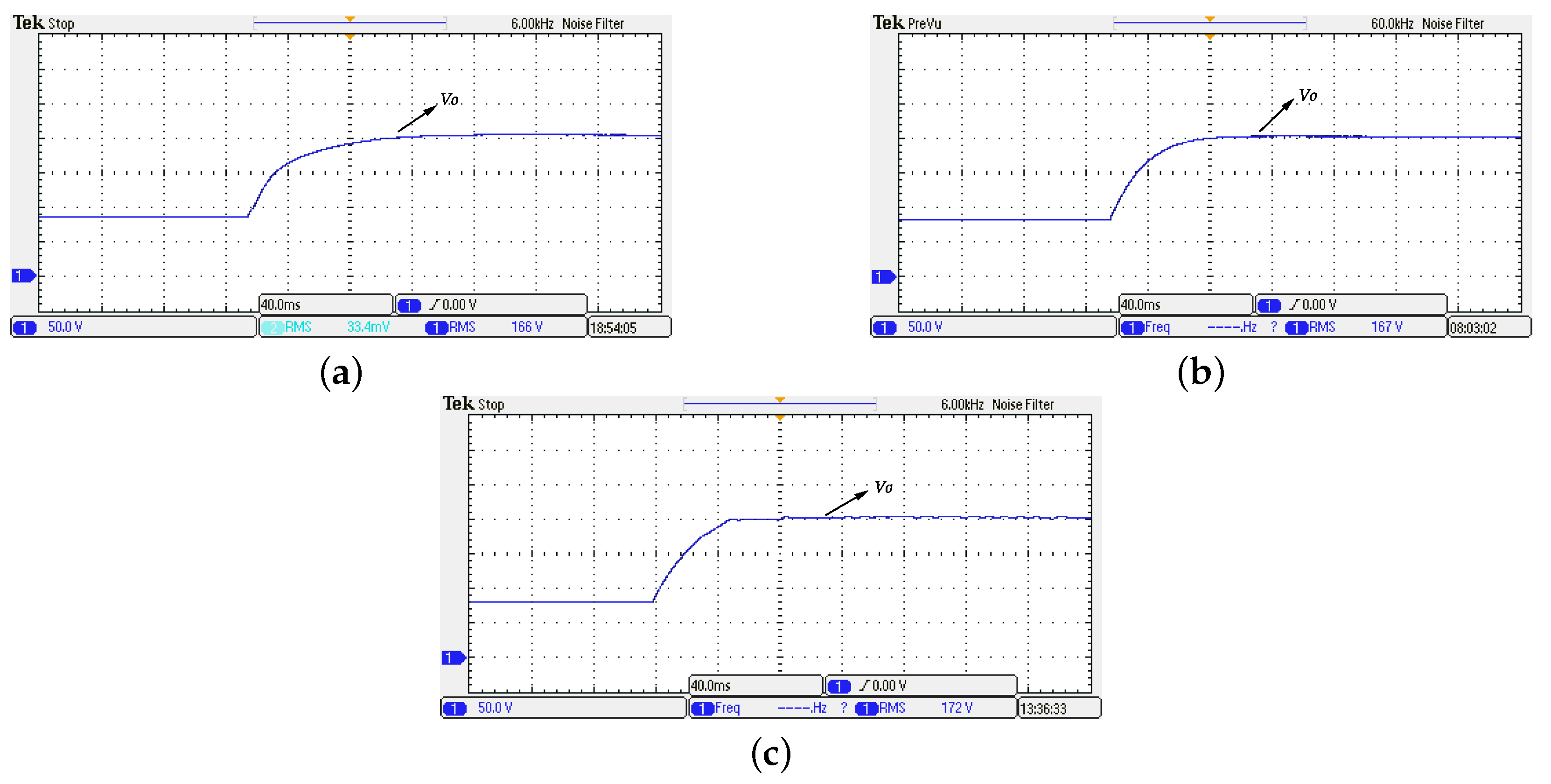
Figure 8 shows the transient response of the output voltage.
Figure 8c, one can seen that the output voltage controlled by the proposed controller can track the reference value (200 V) with no overshoot, and has a settling time about 48 ms.
Figure 8a, the system controlled by the TSM controller (
) takes 104 ms to reach the reference value (200 V), and the system controlled by the FTSM controller (
) has a settling time of 64 ms in
Figure 8b. we can notice that the proposed controller has a 29.4%, 64.8% settling time improvement than FTSM and TSM, respectively, in this system.
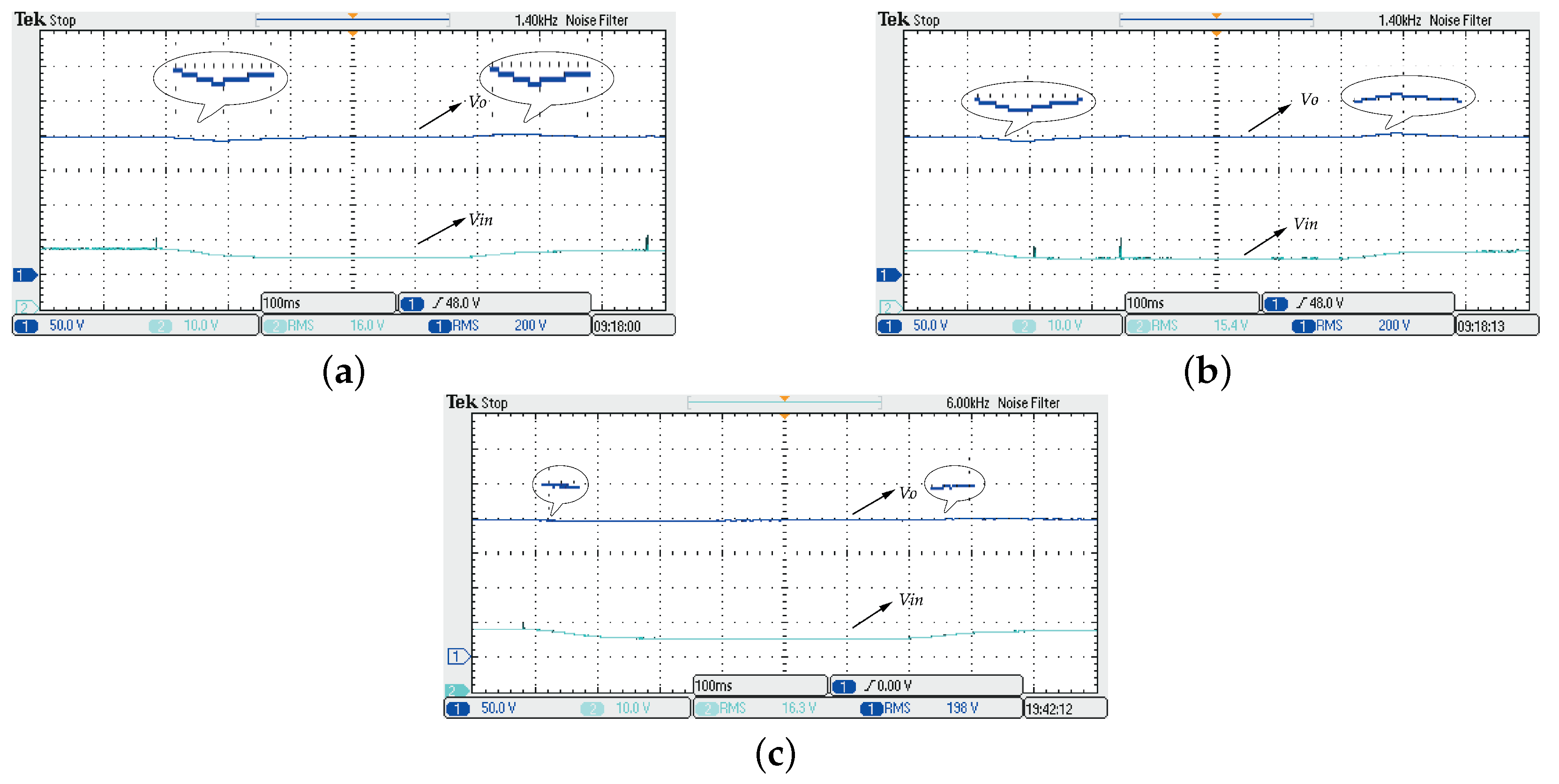
Figure 9 shows the steady output voltage (
) comparison against input voltage disturbance. The input voltage changes from 17 V to 15 V (11.7%) and then returns to 17 V. From the
Figure 9c, the output voltage (
) response exhibits no obvious variation.
Figure 9a, one can see that the output voltage (
) response controlled by the TSM controller (
) takes about 100 ms to recover to the reference value, accompanied by a variation of 10 V (5%). The output voltage (
) response controlled by the FTSM controller (
) has a 80 ms recovery time, and a variation of 10 V too in
Figure 9b. However, a sharp voltage spike was not visible in the three responses.
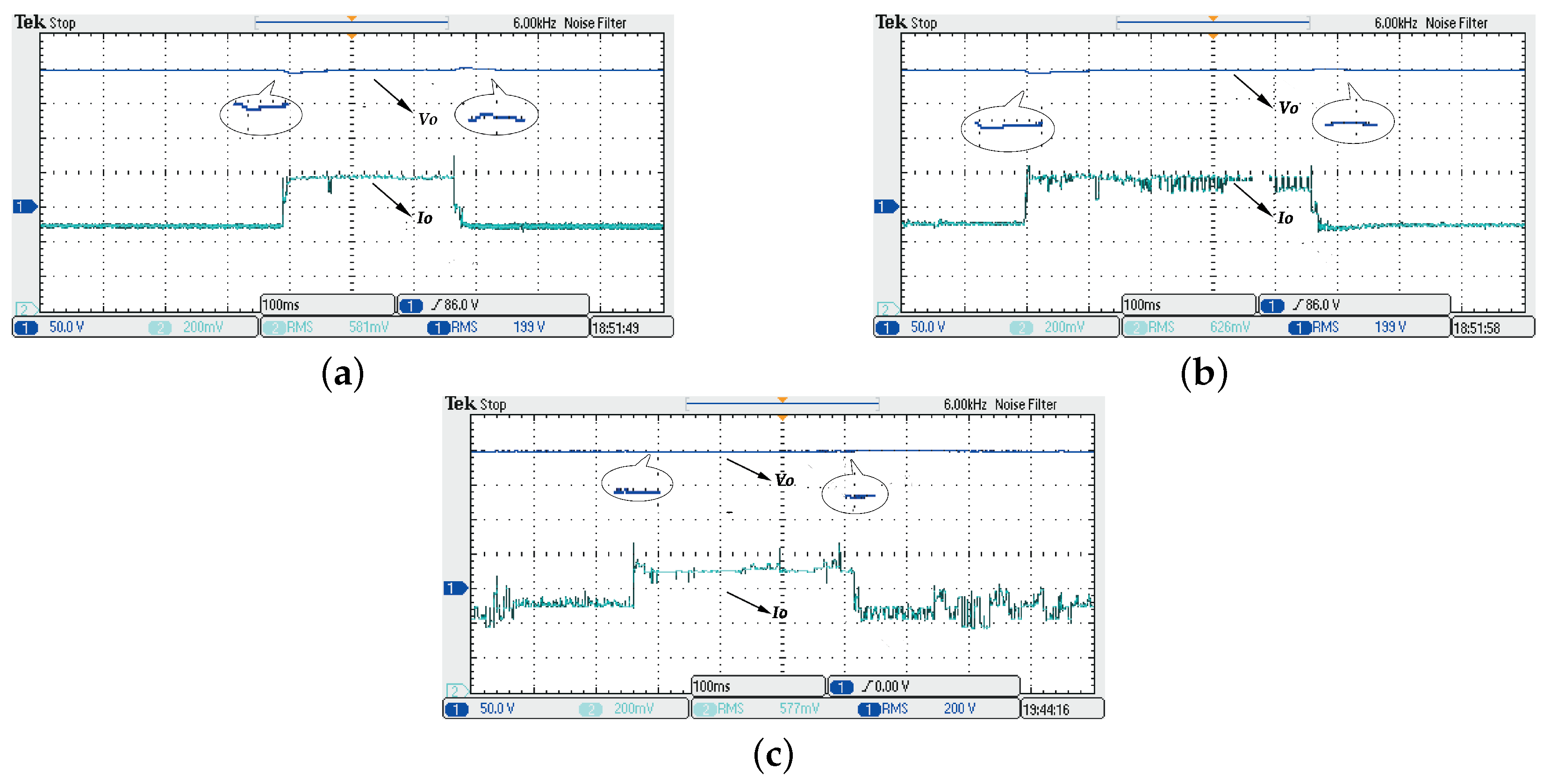
The steady output voltage response versus the output load variation is demonstrated in
Figure 10. Here, resistance changes of −150
(−30% variation) were added to a nominal output load of 500
, and then the load returned to 500
.
Figure 10c, one can see that the output voltage controlled by the proposed controller almost remains constant at the reference value.
Figure 10a, the output voltage controlled by the TSM (
) controller has a slight voltage variation of about 8 V, and takes about 60 ms of recovery time after the moment where the load’s resistance has been decreased, and has a settling time of 25 ms with a variation of 8 V after the moment of the load’s resistance turns back.
Figure 10b, the output voltage controlled by the FTSM (
) controller has 80 ms recovery time with a variation of 5 V after the instant where the load’s resistance is been changed the first time; then, it takes 40 ms to reach the reference signal with a small variation after the moment of the load’s resistance turning back. According to
Figure 9 and
Figure 10, it can be seen that the proposed NFTSM controller has the strongest robustness amongst the three methods. Based on the above results, it can be noticed that the proposed controller has faster convergence time and greater robustness compared with the TSM (
) and FTSM (
) controller. Thus, the proposed control scheme is more superior than the TSM and FTSM control strategies for the high step-up converter. In addition, there was no sharp voltage spike in the voltage waveforms of the switch, diodes, and output voltage at different test conditions, meaning that some low-cost elements can be used.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}