Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines

Abstract
:1. Introduction
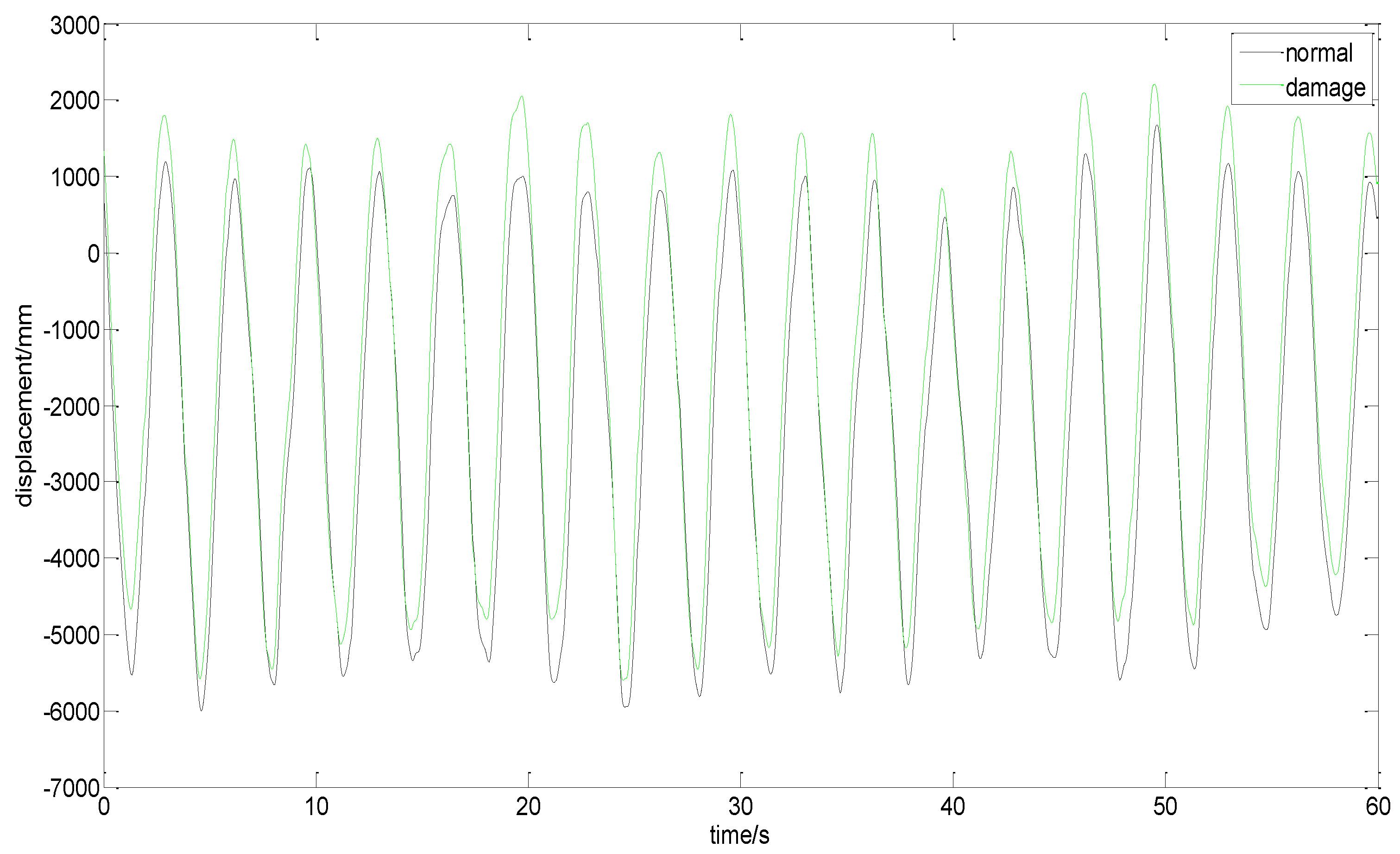
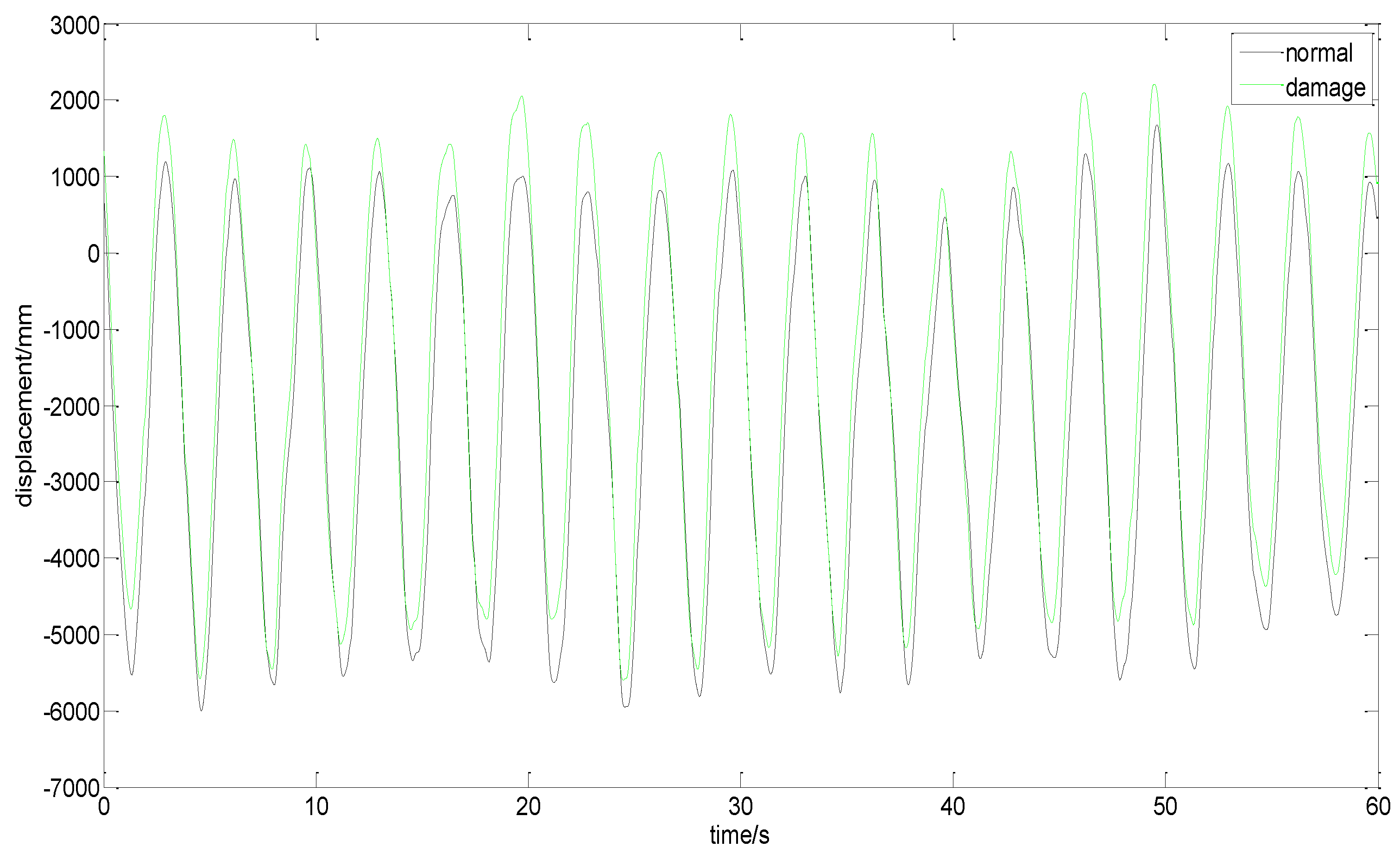
2. Analysis and Simulation of Blade Damage Using GH Bladed
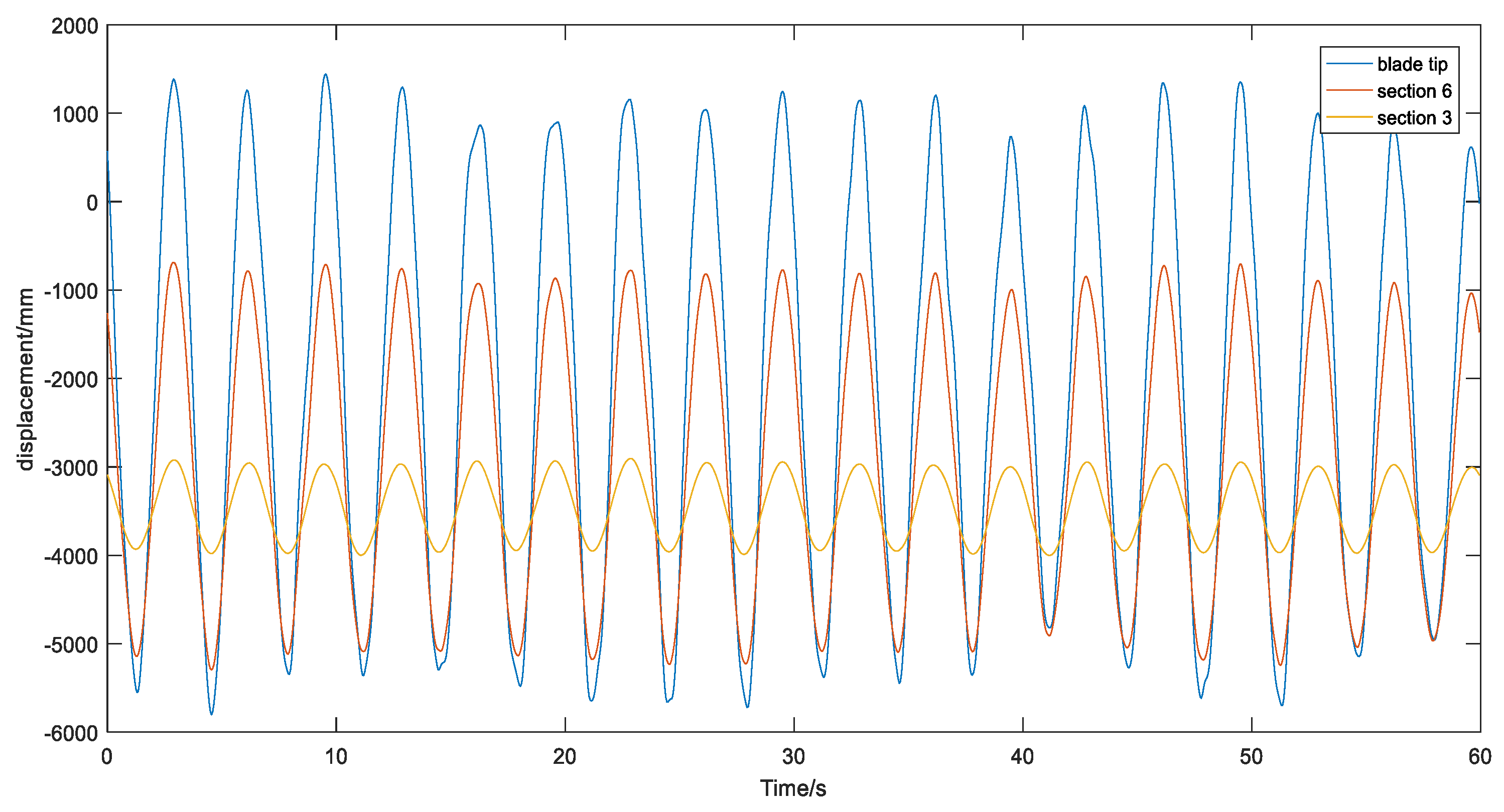
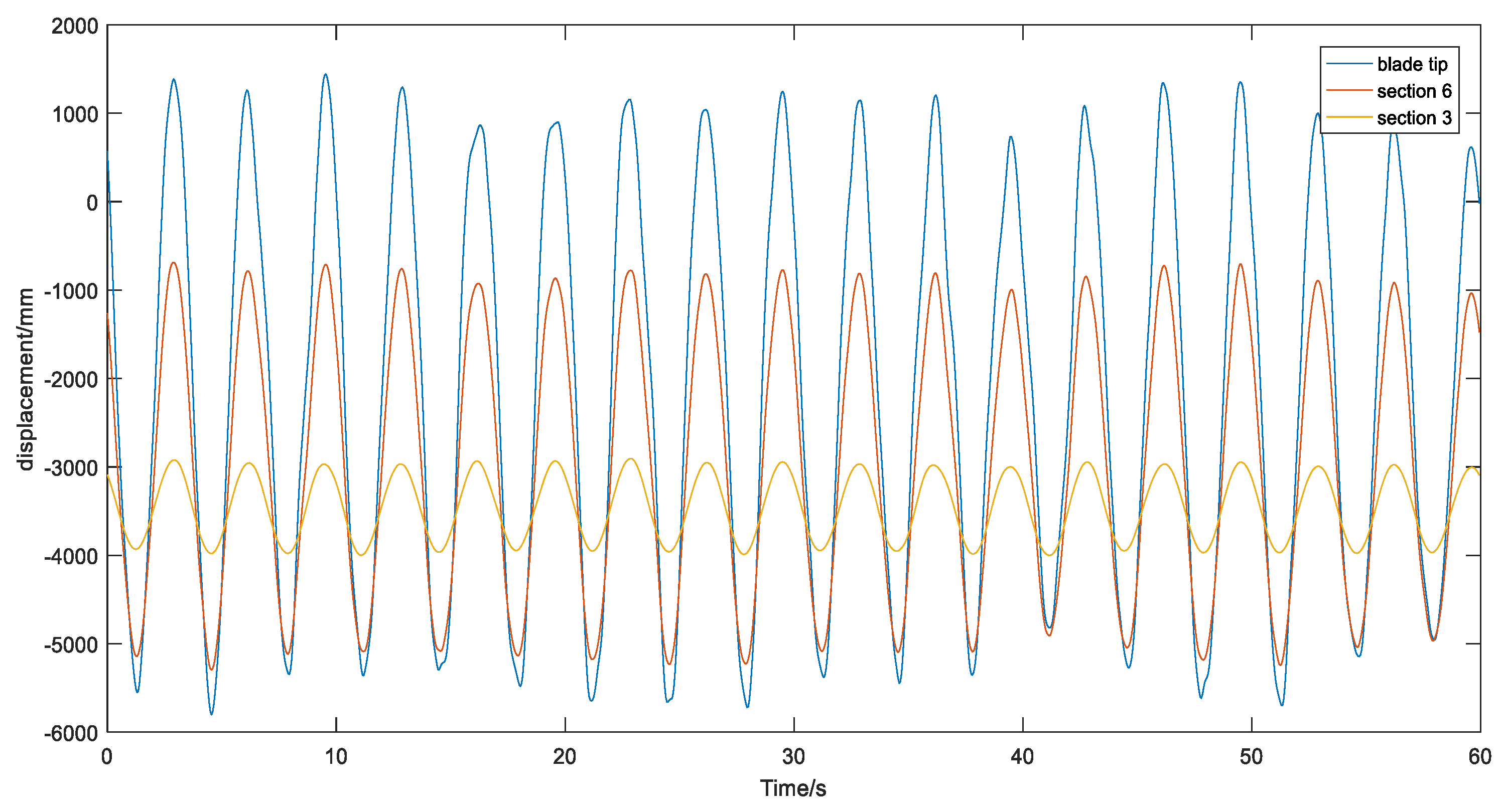
3. Signal Analysis of the Blade Tip Displacement
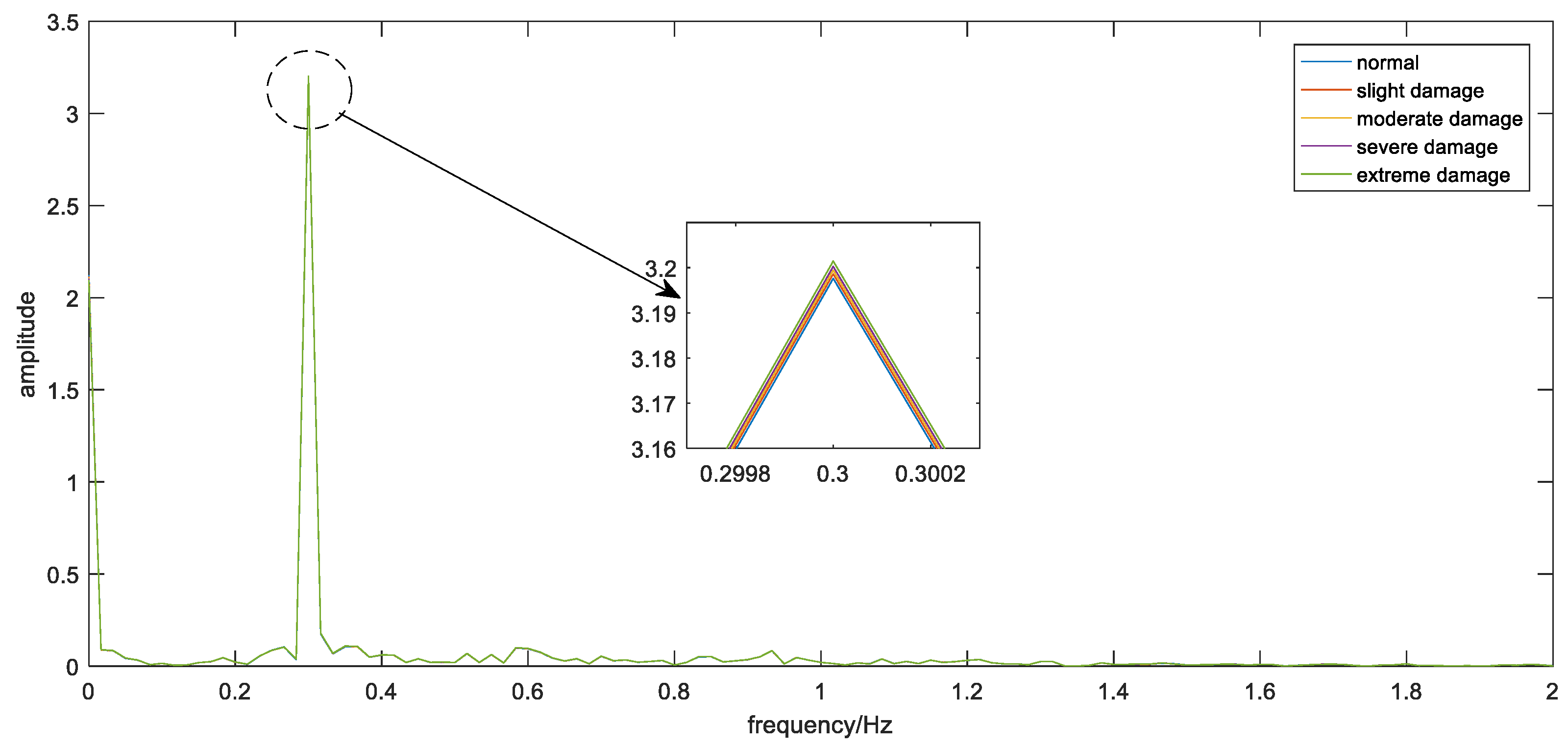
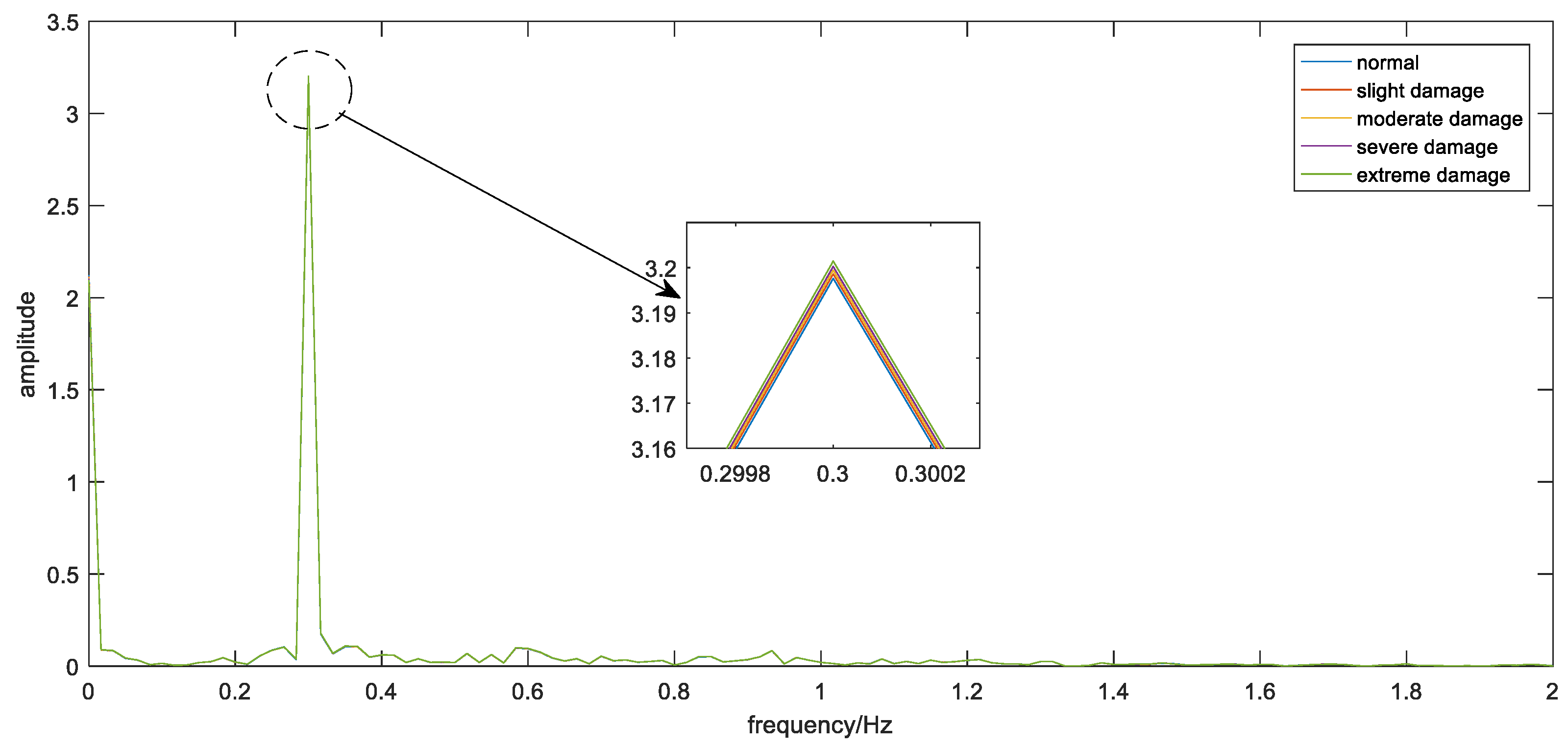
3.1. Fast Fourier Transform (FFT) Analysis of Blade Tip Displacement
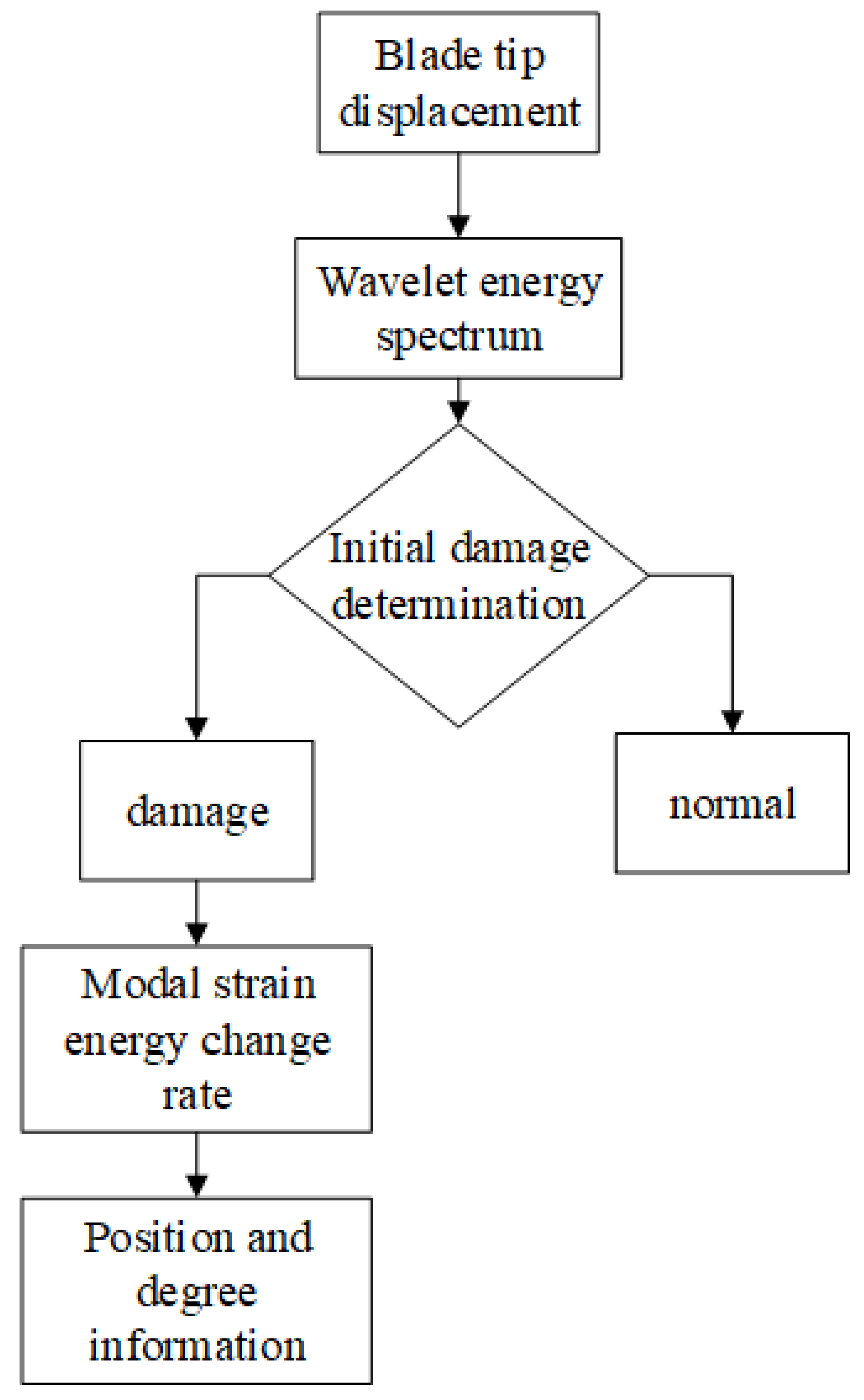
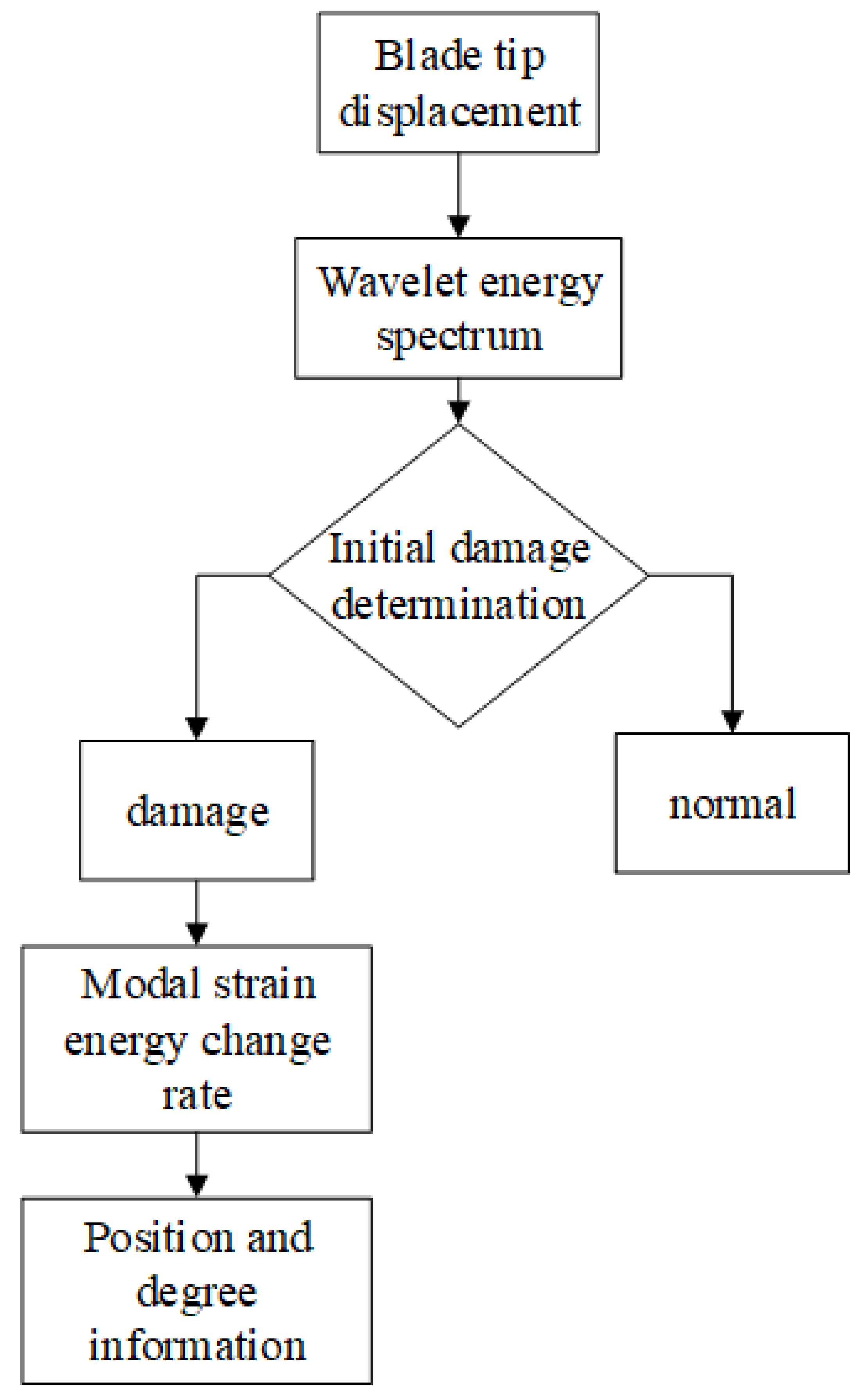
3.2. Wavelet Packet Energy Spectrum Extraction
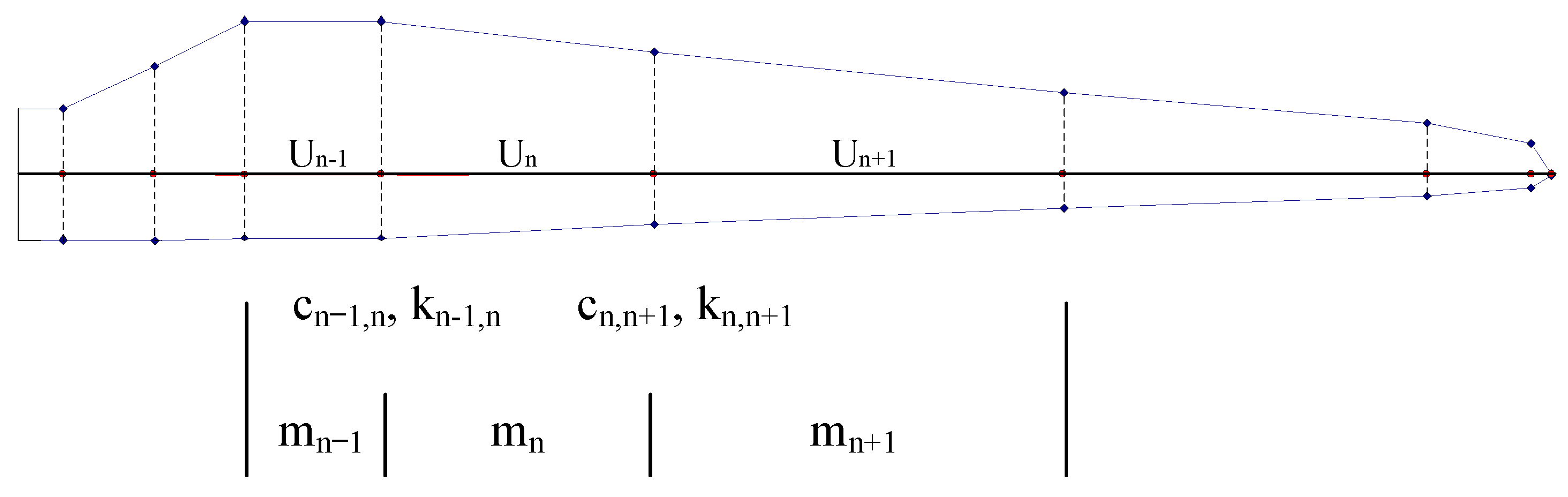
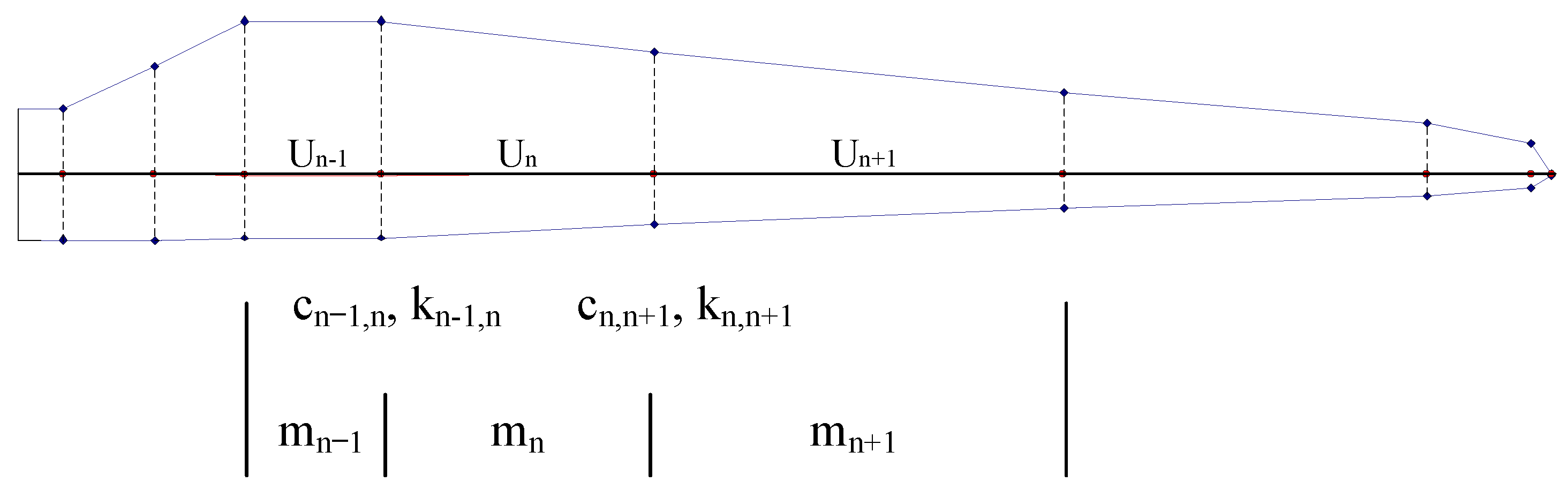
4. Blade Damage Location Based on Operational Modal Testing
4.1. Operational Modal Test Method Applicable to WT Blades
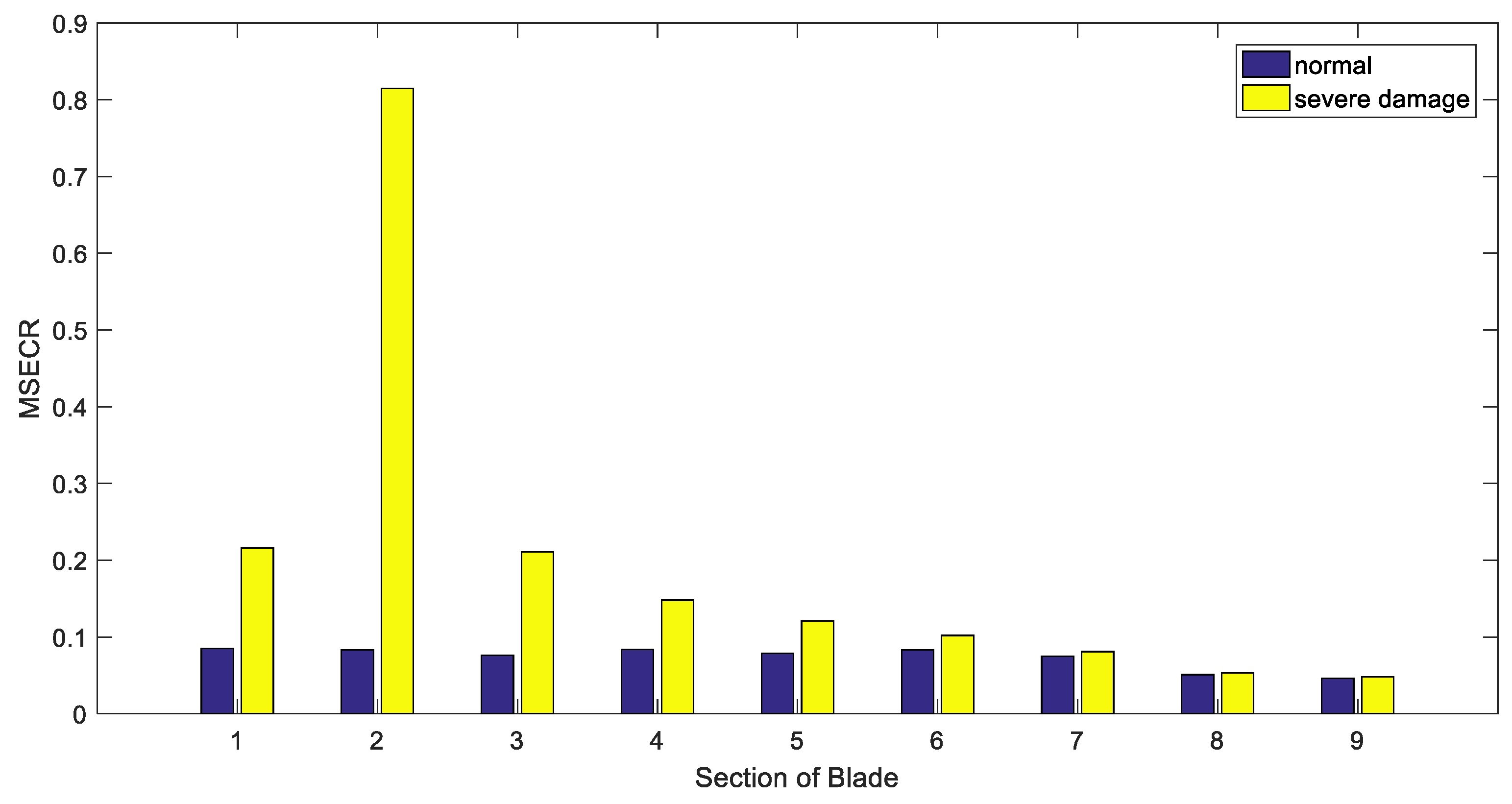
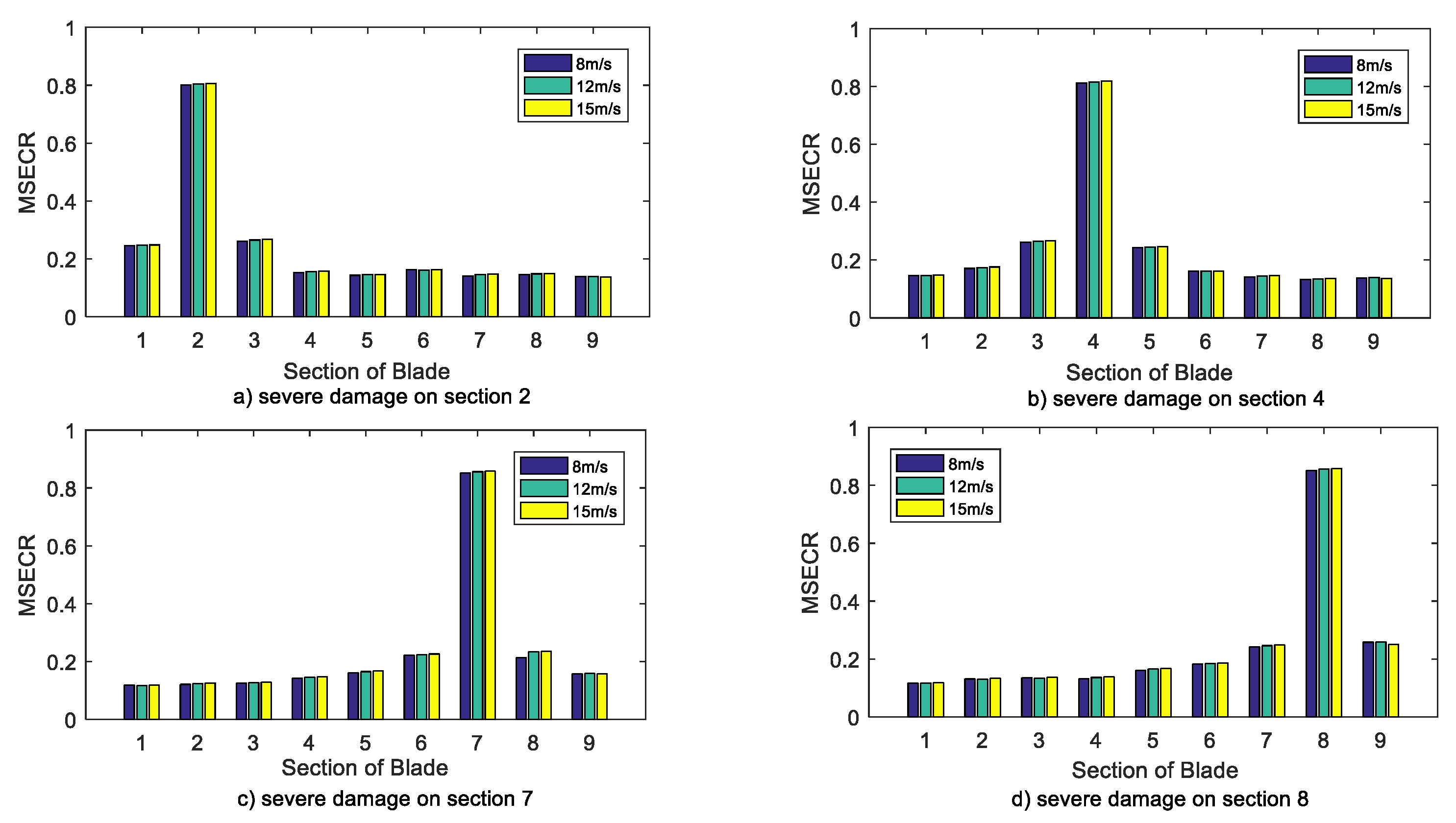
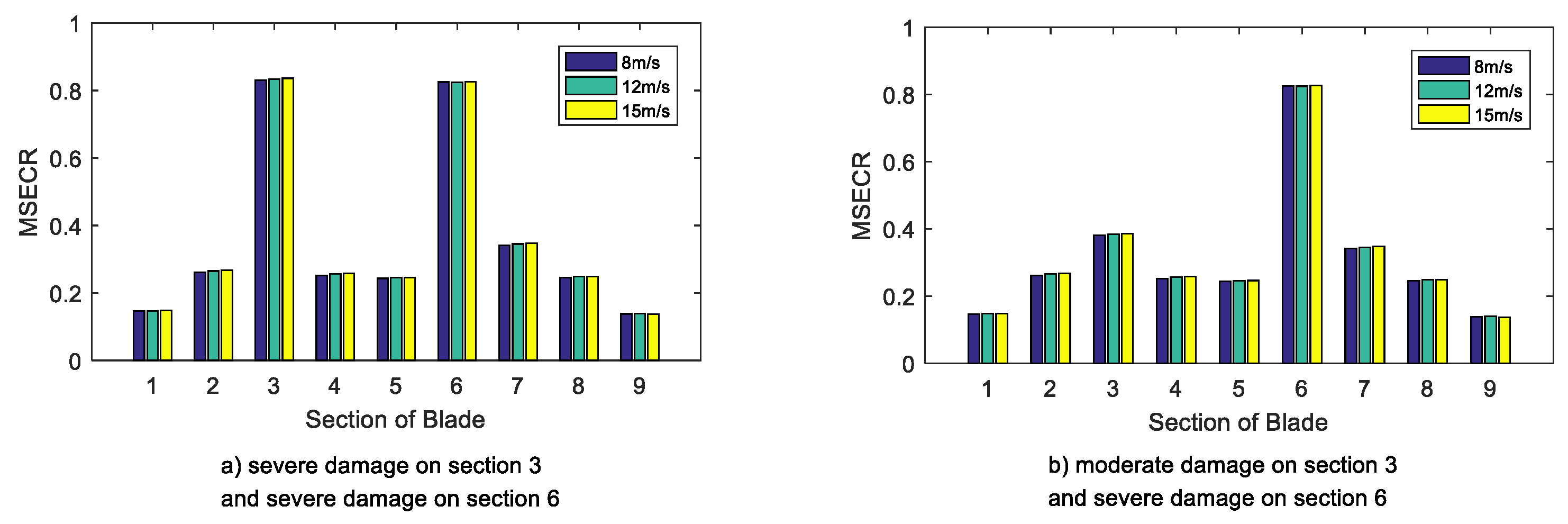
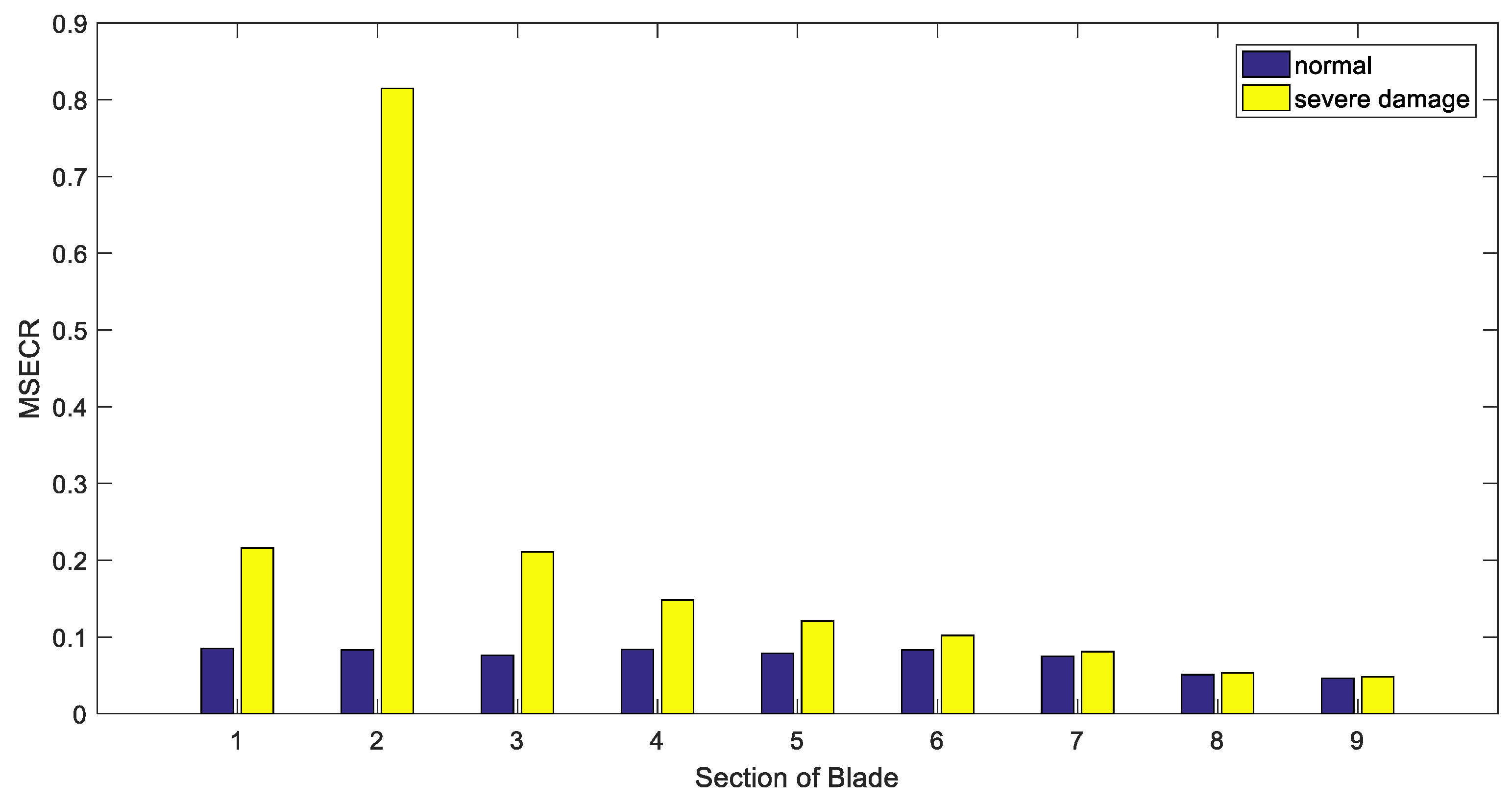
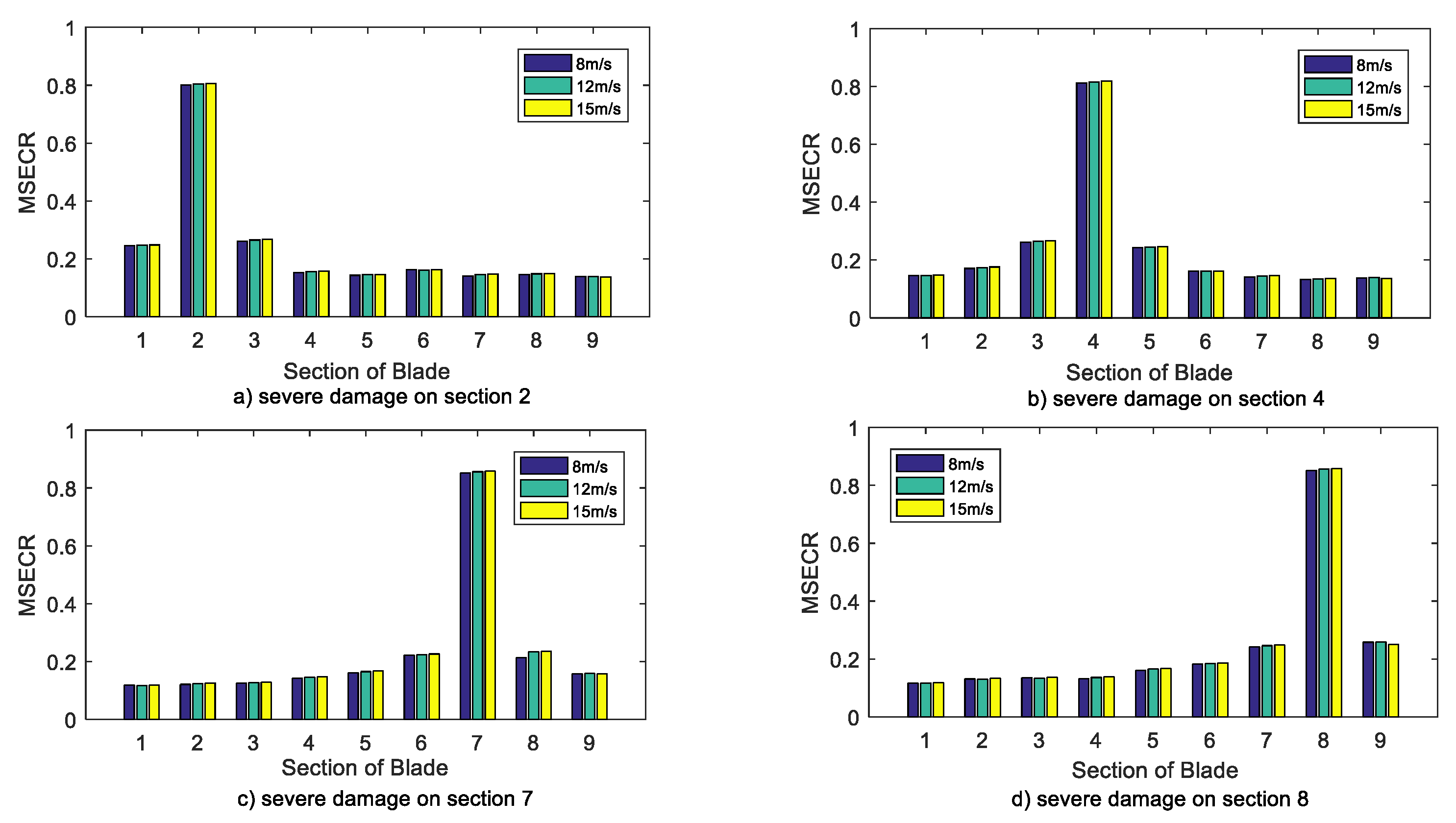
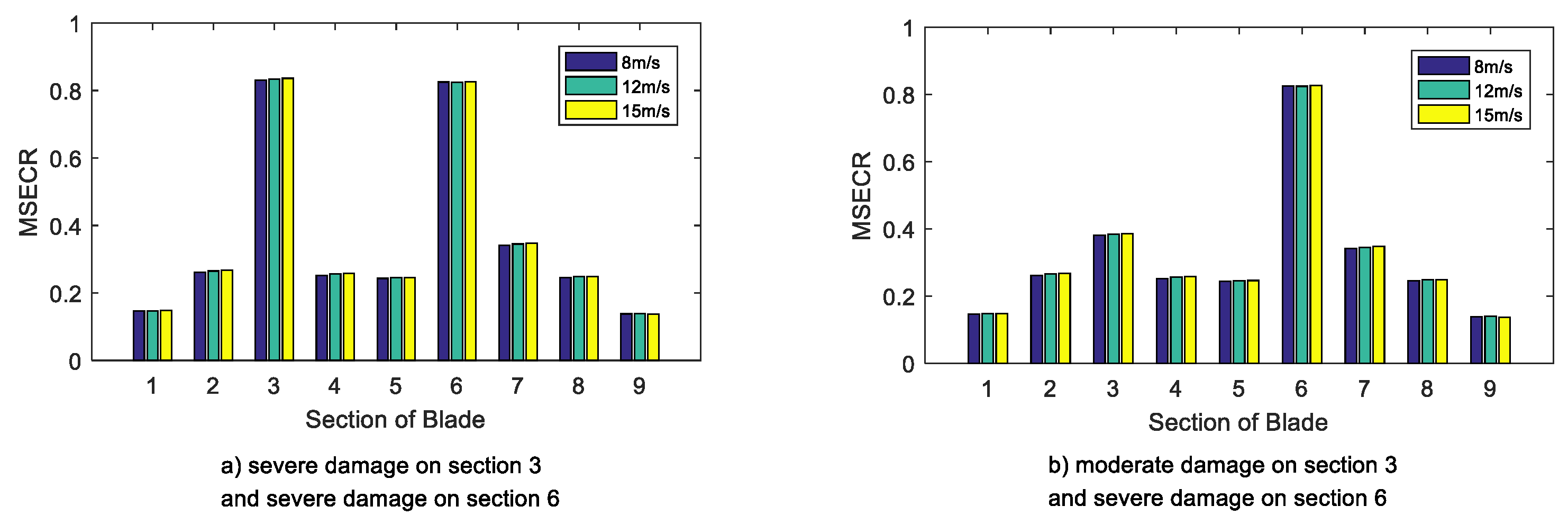
4.2. Blade Damage Location Analysis Based on the MSECR
5. Simulation Verification
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, B.; Sun, D. Testing, inspecting and monitoring technologies for wind turbine blades: A survey. Renew. Sustain. Energy Rev. 2013, 22, 515–526. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, Z.; Xu, J.; Liu, R. Wind turbine Blade Breakage Monitoring with Deep Auto encoders. IEEE Trans. Smart Grid 2018, 9, 2824–2833. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Jiang, J. Wind turbine condition monitoring by the approach of SCADA data analysis. Renew. Energy 2013, 53, 365–376. [Google Scholar] [CrossRef]
- Helbing, G.; Ritter, M. Deep learning for fault detection in wind turbines. Renew. Sustain. Energy Rev. 2018, 98, 189–198. [Google Scholar] [CrossRef]
- Tang, J.; Soua, S.; Mares, C.; Gan, T.H. An experimental study of acoustic emission methodology for inservice condition monitoring of wind turbine blades. Renew. Energy 2016, 99, 170–179. [Google Scholar] [CrossRef]
- Joosse, P.A.; Blanch, M.J.; Dutton, A.G.; Kouroussis, D.A.; Philippidis, T.P.; Vionis, P.S. Acoustic emission monitoring of small wind turbine blades. J. Sol. Energy Eng. 2002, 124, 446–454. [Google Scholar] [CrossRef]
- Sierra-Pérez, J.; Torres-Arredondo, M.A.; Güemes, A. Damage and nonlinearities detection in wind turbine blades based on strain field pattern recognition. FBGs, OBR and strain gauges comparison. Compos. Struct. 2016, 135, 156–166. [Google Scholar] [CrossRef]
- Oh, K.Y.; Park, J.Y.; Lee, J.S.; Epureanu, B.I.; Lee, J.K. A Novel Method and Its Field Tests for Monitoring and Diagnosing Blade Health for WTs. IEEE Trans. Instrum. Meas. 2015, 64, 1726–1733. [Google Scholar]
- Ruan, J.; Ho, S.C.; Patil, D.; Song, G. Structural Health Monitoring of wind turbine Blade using Piezo ceremic Based Active Sensing and Impedance Sensing. In Proceedings of the 11th IEEE International Conference on Networking, Sensing and Control, Miami, FL, USA, 7–9 April 2014; Volume 64, pp. 661–666. [Google Scholar]
- Huh, Y.H.; Kim, J.I.; Lee, J.H.; Hong, S.G.; Park, J.H. Application of PVDF Film Sensor to Detect Early Damage in wind turbine Blade Components. Procedia Eng. 2011, 10, 3304–3309. [Google Scholar] [CrossRef]
- Downey, A.; Ubertini, F.; Laflamme, S. Algorithm for damage detection in wind turbine blades using a hybrid dense sensor network with feature level data fusion. J. Wind Eng. Ind. Aerodyn. 2017, 168, 288–296. [Google Scholar] [CrossRef] [Green Version]
- Sarrafi, A.; Mao, Z.; Niezrecki, C.; Poozesh, P. Vibration-based damage detection in wind turbine blades using Phase-based Motion Estimation and motion magnification. J. Sound Vib. 2018, 421, 300–318. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, M.M.; Behzad, M.; Moradi, H.; Haddadpour, H. Modal-based damage identification for the nonlinear model of modern wind turbine blade. Renew. Energy 2016, 94, 391–409. [Google Scholar] [CrossRef]
- Moradi, M.; Sivoththaman, S. MEMS Multi sensor Intelligent Damage Detection for wind turbines. IEEE Sens. J. 2015, 15, 1437–1444. [Google Scholar] [CrossRef]
- Abouhnik, A.; Albarbar, A. Wind turbine blades condition assessment based on vibration measurements and the level of an empirically decomposed feature. Energy Convers. Manag. 2012, 64, 606–613. [Google Scholar] [CrossRef]
- Gonzalez, A.G.; Fassois, S.D. A supervised vibration-based statistical methodology for damage detection under varying environmental conditions & its laboratory assessment with a scale wind turbine blade. J. Sound Vib. 2016, 366, 484–500. [Google Scholar]
- Wang, Y.; Liang, M.; Xiang, J. Damage detection method for wind turbine blades based on dynamics analysis and mode shape difference curvature information. Mech. Syst. Signal Process. 2014, 48, 351–367. [Google Scholar] [CrossRef]
- Lee, K.; Aihara, A.; Puntsagdash, G.; Kawaguchi, T.; Sakamoto, H.; Okuma, M. Feasibility study on a strain based deflection monitoring system for wind turbine blades. Mech. Syst. Signal Process. 2017, 82, 117–129. [Google Scholar] [CrossRef]
- Dervilis, N.; Choi, M.; Taylor, S.G.; Barthorpe, R.J.; Park, G.; Farrar, C.R.; Worden, K. On damage diagnosis for a wind turbine blade using pattern recognition. J. Sound Vib. 2014, 333, 1833–1850. [Google Scholar] [CrossRef]
- Tcherniak, D.; Molgaard, L.L. Active vibration-based structural health monitoring system for wind turbine blade: Demonstration on an operating Vestas V27 WT. Struct. Health Monit. 2017, 16, 536–550. [Google Scholar] [CrossRef]
- Shu, L.; Li, H.; Hu, Q.; Jiang, X.; Qiu, G.; McClure, G.; Yang, H. Study of ice accretion feature and power characteristics of wind turbines at natural icing environment. Cold Reg. Sci. Technol. 2018, 147, 45–54. [Google Scholar] [CrossRef]
- Saleh, S.A.; Moloney, C.R. Development and testing of wavelet packet transform-based detector for ice accretion on wind turbines. In Proceedings of the 2011 Digital Signal Processing and Signal Processing Education Meeting (DSP/SPE), Sedona, AZ, USA, 4–7 January 2011; pp. 72–77. [Google Scholar]
- Li, Y.; Wang, S.; Liu, Q.; Feng, F.; Tagawa, K. Characteristics of ice accretions on blade of the straight-bladed vertical axis wind turbine rotating at low tip speed ratio. Cold Reg. Sci. Technol. 2017, 145, 1–13. [Google Scholar] [CrossRef]
- Corradini, M.L.; Ippoliti, G.; Orlando, G. A Sliding Mode Observer-Based Icing Detection and Estimation Scheme for Wind Turbines. J. Dyn. Syst. Meas. Control 2018, 140, 014502. [Google Scholar] [CrossRef]
- Liu, T.; Li, A.Q.; Ding, Y.L.; Li, Z.J.; Fei, Q.G. Experimental study on structural damage alarming method based on wavelet packet energy spectrum. J. Vib. Shock 2009, 28, 4–9. [Google Scholar]
- Luo, J.; Liu, G.; Huang, Z.-M. Modal parametric identification under non-stationary excitation based on random decrement method. J. Vib. Shock 2015, 21, 19–24. [Google Scholar]
- Zhao, Y.; Xue, B.; Zhang, J.; North China University of Water Resources and Electric Power. Research on Modal Parameter Identification of Bridge Structure Based on ARMA Model. J. North China Univ. Water Resour. Electr. Power 2015, 36, 21–24. [Google Scholar]
- Seyedpoor, S.M. A two stage method for structural damage detection using modal strain energy based index and particle swarm optimization. Int. J. Non-Linear Mech. 2012, 47, 1–8. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Distance along pitch axis (m) | 0 | 1.15 | 3.44 | 5.74 | 9.19 | 16.07 | 26.41 | 35.59 | 38.23 | 38.75 |
| Chord (m) | 2.07 | 2.07 | 2.76 | 3.44 | 3.44 | 2.76 | 1.84 | 1.15 | 0.69 | 0.03 |
| Aerodynamic twist (deg) | 0 | 0 | 9 | 13 | 11 | 7.8 | 3.3 | 0.3 | 2.75 | 4 |
| Thickness (%) | 100 | 100 | 64 | 40 | 30 | 22 | 15 | 13 | 13 | 13 |
| Mass/unit length(kg/m) | 1084.77 | 369.81 | 277.36 | 234.21 | 209.56 | 172.58 | 103.55 | 55.47 | 40.68 | 24.65 |
| Edgewise stiffness (N·m2) | 7.47 × 109 | 2.61 × 109 | 2.09 × 109 | 1.43 × 109 | 1.29 × 109 | 5.65 × 108 | 1.22 × 108 | 2.43 × 107 | 4,518,000 | 8167.51 |
| Flapwise stiffness (N·m2) | 7.47 × 109 | 2.43 × 109 | 1.41 × 109 | 8.34 × 108 | 5.56 × 108 | 2.09 × 108 | 2.95 × 107 | 2,259,000 | 113,824 | 3127.98 |
| Damage Degree | Band 1 | Band 2 | Band 3 | Band 4 | Band 5 | Band 6 | Band 7 | Band 8 |
|---|---|---|---|---|---|---|---|---|
| Extreme damage | 94.8525 | 2.1198 | 0.5638 | 0.1149 | 0.0585 | 0.0259 | 0.0139 | 0.0043 |
| Severe damage | 94.7138 | 2.1173 | 0.5634 | 0.1148 | 0.0585 | 0.0259 | 0.0139 | 0.0043 |
| Moderate damage | 94.6368 | 2.1126 | 0.5631 | 0.1146 | 0.0585 | 0.0258 | 0.0139 | 0.0044 |
| Slight damage | 94.5633 | 2.1203 | 0.5573 | 0.1141 | 0.0584 | 0.0258 | 0.0138 | 0.0043 |
| Normal | 94.2946 | 15.7002 | 1.8677 | 7.7063 | 0.4163 | 0.3263 | 0.9087 | 3.8432 |
| Number | Parameter Name | Value |
|---|---|---|
| 1 | Length of blade | 38.75 m |
| 2 | Rated wind speed | 12 m/s |
| 3 | Rated power | 2 WM |
| 4 | Above-rated generator speed set-point | 1500 rpm |
| 5 | Transmission ratio | 83.33 |
| 6 | Minimum generator speed | 850 rpm |
| 7 | Pitch angle range | −2–90° |
| 8 | Height of tower | 60 m |
| 9 | Rated generator torque | 13,403 Nm |
| 10 | Maximum generator torque | 14,400 Nm |
| 11 | Air density | 1.225 kg/m3 |
| 12 | Cut-in wind speed | 4 m/s |
| 13 | Cut-out wind speed | 25 m/s |
| 14 | Number of blades | 3 |
| 15 | Rotor diameter | 80 m |
| Blade Unit | First-Order Frequency | First-Order Mode | Second-Order Frequency | Second-Order Mode |
|---|---|---|---|---|
| 1 | 0.3201 | −0.005207 | 3.8343 | 0.000059 |
| 2 | 0.2986 | −0.002834 | 3.7893 | −0.000078 |
| 3 | 0.2794 | 0.017348 | 3.9138 | −0.000144 |
| 4 | 0.2677 | 0.073219 | 4.0817 | 0.000130 |
| 5 | 0.2472 | 0.304202 | 4.3765 | −0.000204 |
| 6 | 0.2036 | 1.419367 | 4.3478 | −0.001643 |
| 7 | 0.2349 | 1.096382 | 3.3818 | −0.030174 |
| 8 | 0.2445 | 1.043385 | 3.0982 | −0.011586 |
| 9 | 0.2464 | 1.026799 | 3.1026 | −0.013261 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, F.; Wu, X.; Liu, Q.; Liu, J.; Yang, X. Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines. Energies 2019, 12, 522. https://doi.org/10.3390/en12030522
Gao F, Wu X, Liu Q, Liu J, Yang X. Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines. Energies. 2019; 12(3):522. https://doi.org/10.3390/en12030522
Chicago/Turabian StyleGao, Feng, Xiaojiang Wu, Qiang Liu, Juncheng Liu, and Xiyun Yang. 2019. "Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines" Energies 12, no. 3: 522. https://doi.org/10.3390/en12030522
APA StyleGao, F., Wu, X., Liu, Q., Liu, J., & Yang, X. (2019). Fault Simulation and Online Diagnosis of Blade Damage of Large-Scale Wind Turbines. Energies, 12(3), 522. https://doi.org/10.3390/en12030522