1. Introduction
The DRPMSM with weak thermal coupling and no electromagnetic coupling between phase winding is powered by two inverters. It can be applied in the fields of aerospace, national defense, and where needed to ensure the reliable operation of electric actuators [
1]. In the PMSM drive system, the most common electrical fault is the inter-turn short circuit fault (ISCF) [
2]. If the coil state is not detected and diagnosed during the initial stage of a fault, the fault may gradually deteriorate and spread, threatening the safety and reliability of the whole system, so on-line diagnosis of ISCFs is necessary. Domestic and overseas scholars have carried out research on many aspects of fault diagnosis in PMSM coils. In [
3], the dual redundancy permanent magnet brushless DC motor (PMBDCM) is taken as the research object. Coil 5 is selected as the wavelet basis function to extract features of the current signal, and the neural network algorithm is used to diagnose the ISCF. In [
4], a simple method of diagnosing the ISCF for three-phase windings with star connections is proposed. This method does not depend on the precise phasor calculation of voltage and current, but the analysis of voltage in the neutral point to realize the diagnosis. In [
5], a dynamic modeling method for ISCF is introduced. For three-phase asymmetrical condition under fault, the positive and negative sequence components of current, flux linkage and voltage are acquired by symmetrical component method. In [
6], a diagnostic method based on amplitudes of characteristic frequency components of load current as features. In [
7], the extended
dq matrix method is used to derive the formulas of
dq-axis voltage of an 18-slot/6-pole PMSM before and after the fault occurs. Taking the current as fault signal, harmonic spectrum analysis is performed to determine whether the stator winding has an ISCF. In [
8], the influence of different slot-pole match and the ISCF position of fault-tolerant PMSM on motor efficiency and short-circuit current are discussed. In [
9], an adaptive fuzzy control system for PMBDCM is established. The power supply current waveform is used as a diagnostic signal to detect the ISCF. In [
10], the fault diagnosis is performed by calculating the sum of phase voltages, and the fault phase and short-circuit turns are determined by discrete Fourier transform and short-time Fourier transform. In [
11], a detailed derivation of the DRPMSM parameters is given and fault diagnosis is realized by analyzing the characteristics of the difference between straight-axis voltages.
In general, the research on ISCF diagnosis is concentrated on conventional PMSM, while there are few studies on the DRPMSM. When two sets of three-phase windings operate simultaneously, both of the current instructions come from a speed regulator. Although their current regulators are separated, due to the extremely fast adjustment of the current regulator, the currents of fault winding and healthy winding are almost equal when ISCF occurs, and as a consequence, many of the conventional diagnostic methods that use the fault characteristics of currents are not suitable for this type of DRPMSM. This paper analyzes the ISCF model of the DRPMSM from the two aspects of instantaneous reactive power and fundamental circuit theory combined with phasor analysis.
5. The Difference between Reactive Power after ISCF Occurs
If the contact resistance is not considered, substitute (12) into (11):
where
is the amplitude of
, and
is the phase angle of
.
It can be seen from Equation (32) that the value of
and
depend on
and
. The parameters in
Table 1 are introduced into Equation (32) to obtain the relationship curve which are shown in
Figure 6 and
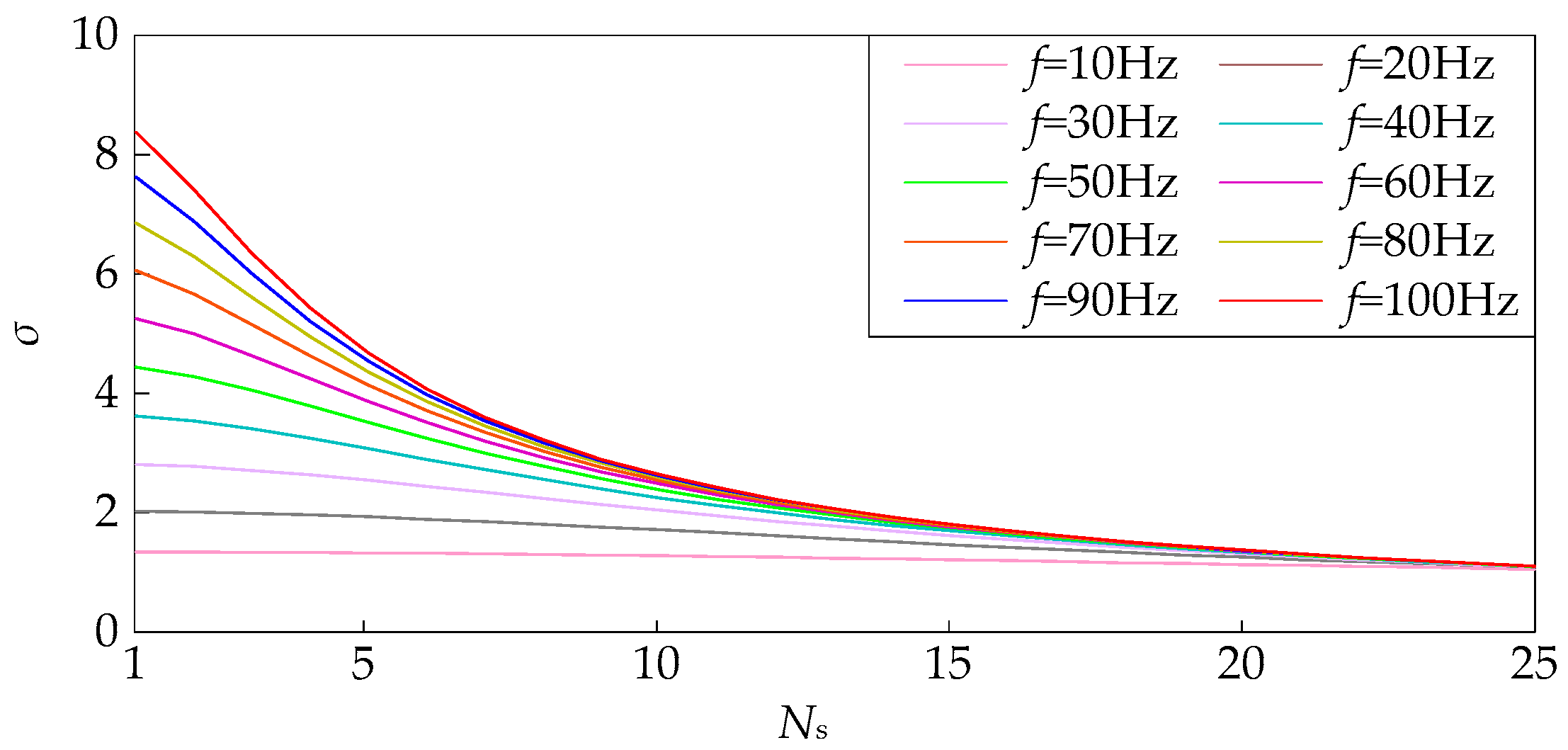
Figure 7. It can be seen from the
Figure 6 that
decreases with the increase of the number of short-circuit turns and increases with the increase of the operating frequency. When the number of short-circuit turns is large, the influence of the resistance in Equation (32) is negligible and
approaches a fixed value.
decreases with the increase of number of short-circuit turns, eventually approaches 0, and increases first and then decreases as the operating frequency increases.
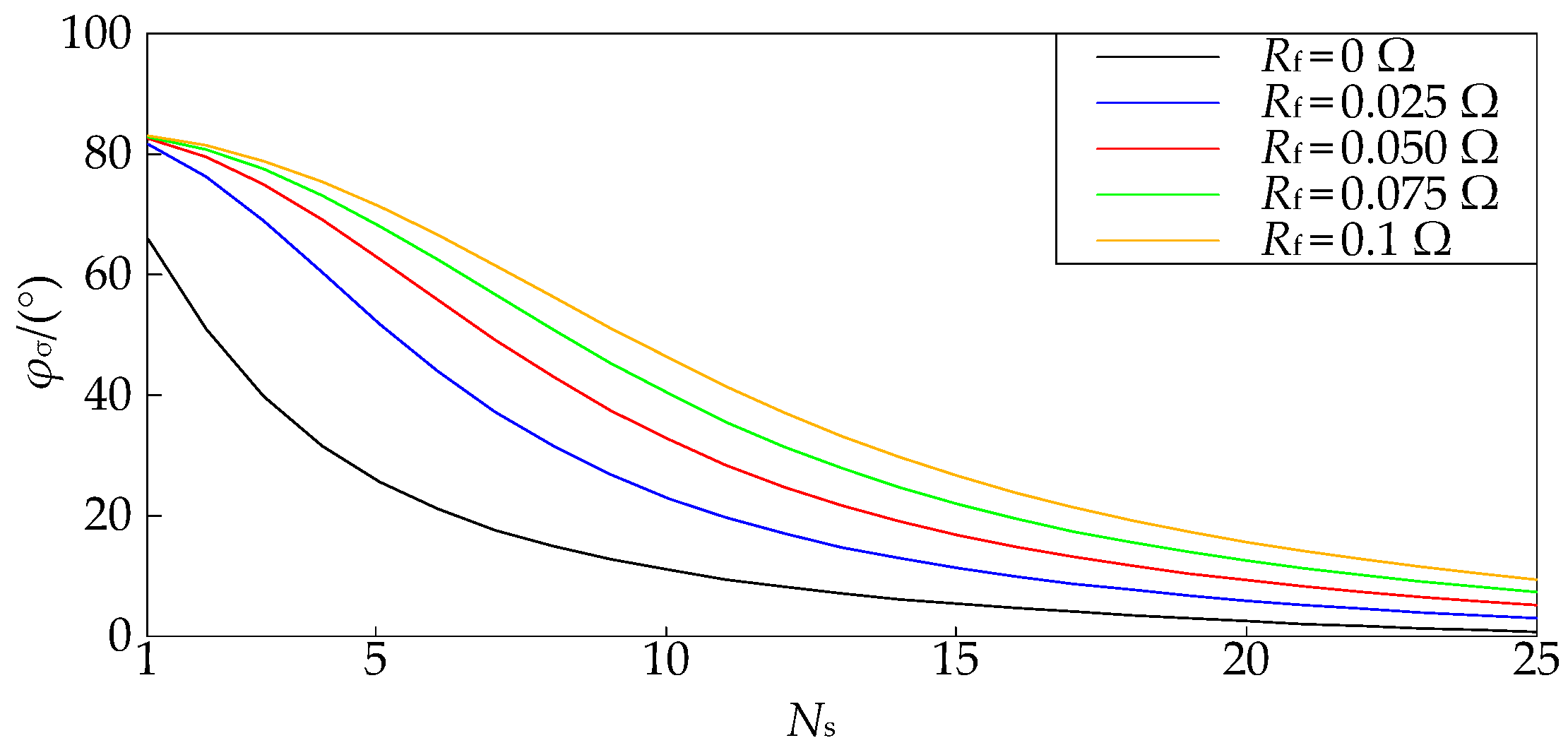
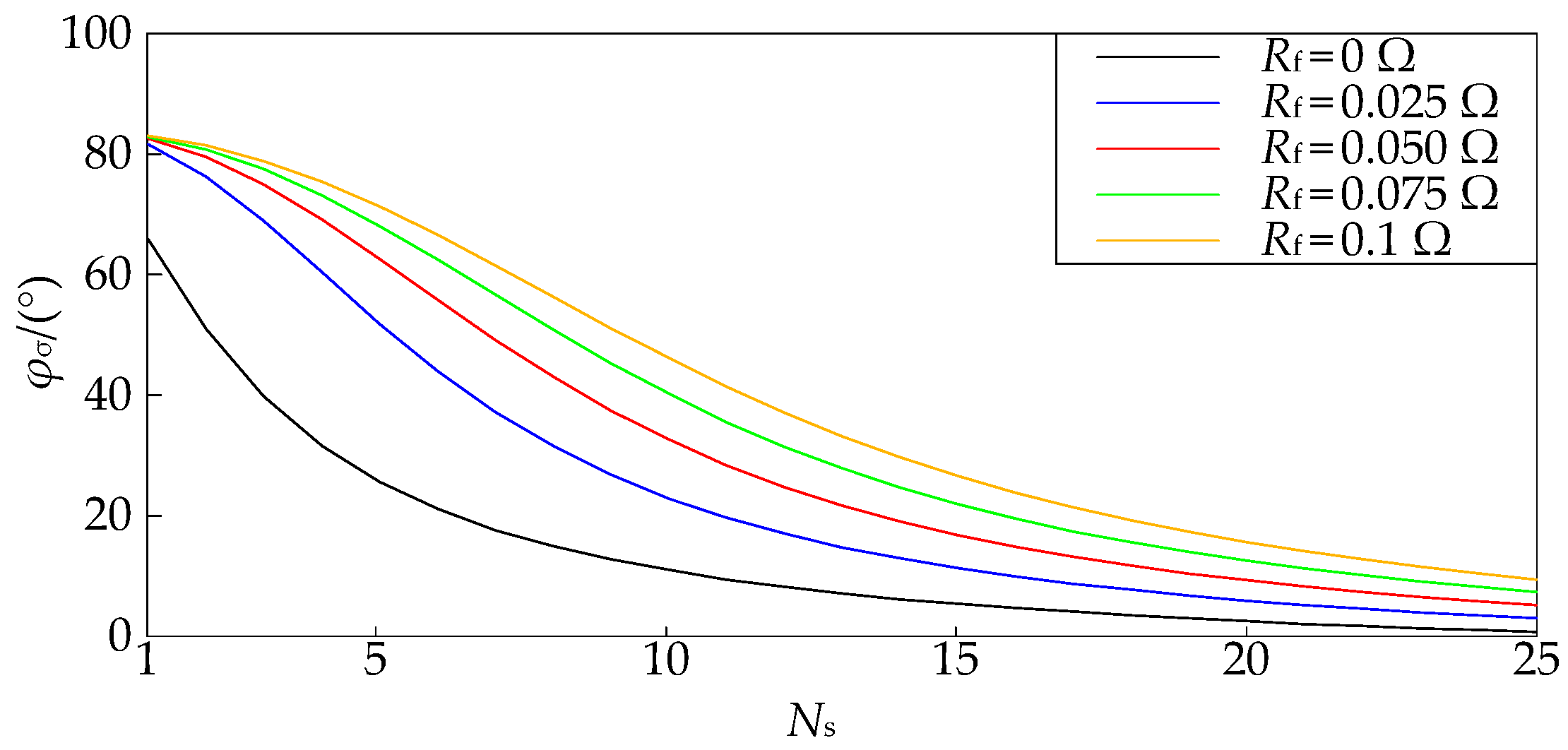
Considering the influence of contact resistance, if the motor operates at a rated frequency of 100 Hz, the curve of
and
with the number of short-circuit turns and contact resistance are shown in
Figure 8 and
Figure 9, respectively.
When the number of short-circuit turns is small, since the denominator of the Equation (32) becomes larger after considering the contact resistance,
becomes smaller than that regardless of the contact resistance. With the number of short-circuit turns increases, the imaginary part of the denominator in the Equation (32) gradually plays a major role. So, the difference between the value of
and that regardless of the contact resistance is getting smaller and smaller, and they are almost equal when the number of short-circuit turns is large. Similarly, the introduction of contact resistance increases the real part of the denominator in Equation (32), thereby reducing the real part of Equation (32), leading to the final result that the value of
increases. As can be seen from
Figure 9, the greater the contact resistance is, the greater the degree of raising of
is.
When the motor is running, according to Equation (31), the phase angle of
will be rotated counterclockwise by
on the basis of
. The phase angle of
coincides with the axis of the coil where the ISCF occurs, just like “12” or “-11” shown in
Figure 10.
When the ISCF occurs at 12th tooth, the position of
relative to
is shown in
Figure 10. Obviously,
is greater than 0. So, the difference of reactive power
is a positive value.
When the ISCF occurs at 11th tooth regardless of the contact resistance
, if the number of short-circuit turns is large, that is,
, ignoring the influence of the resistance
in
, the phase angle of
is close to 0 degree, and the phase of
is nearly same with that of
. The phase angle
which
leads
approaches −7π/72, and the value of Δ
L is approximately
L/2. Then,
can be described as:
According to Equation (33) and the parameters in
Table 1, when
is relatively small,
approaches 0. Actually, according to the above analysis, the existence of the contact resistance
will raise the phase angle
of
(the contact resistance is relatively large at the beginning of the ISCF, and the degree of being raised of
is large), which makes the angle
that
leads
greater than −7π/72, or even a positive value, thereby
will increase to be greater than 0. When I
C is relatively large, it is apparent that
is greater than 0.
If the number of short-circuit turns is small, i.e.,
, the phase angle
is large according to
Figure 10. The angle
that
leads
is an acute angle which ensures
.
By the analysis above, it is known that no matter which tooth the ISCF occurs at, there is a conclusion that is greater than 0. When the motor is running, the faulty set is the one with relatively small instantaneous reactive power.
Actually, there are harmonic currents and correspondent negative sequence components in the model, and the motor parameters themselves are asymmetrical, so an appropriate threshold can be set in the diagnostic test to take those factors into consideration.
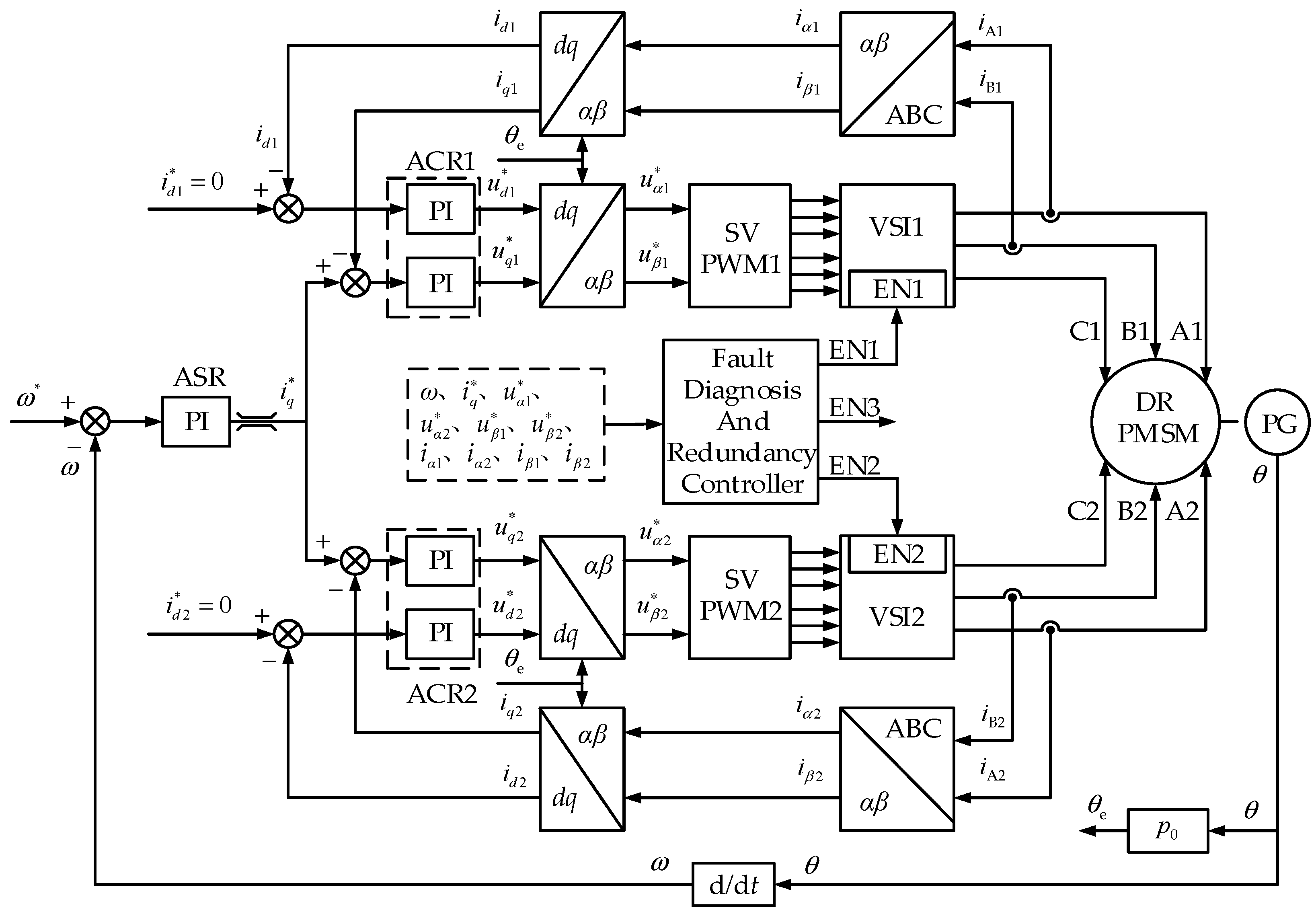
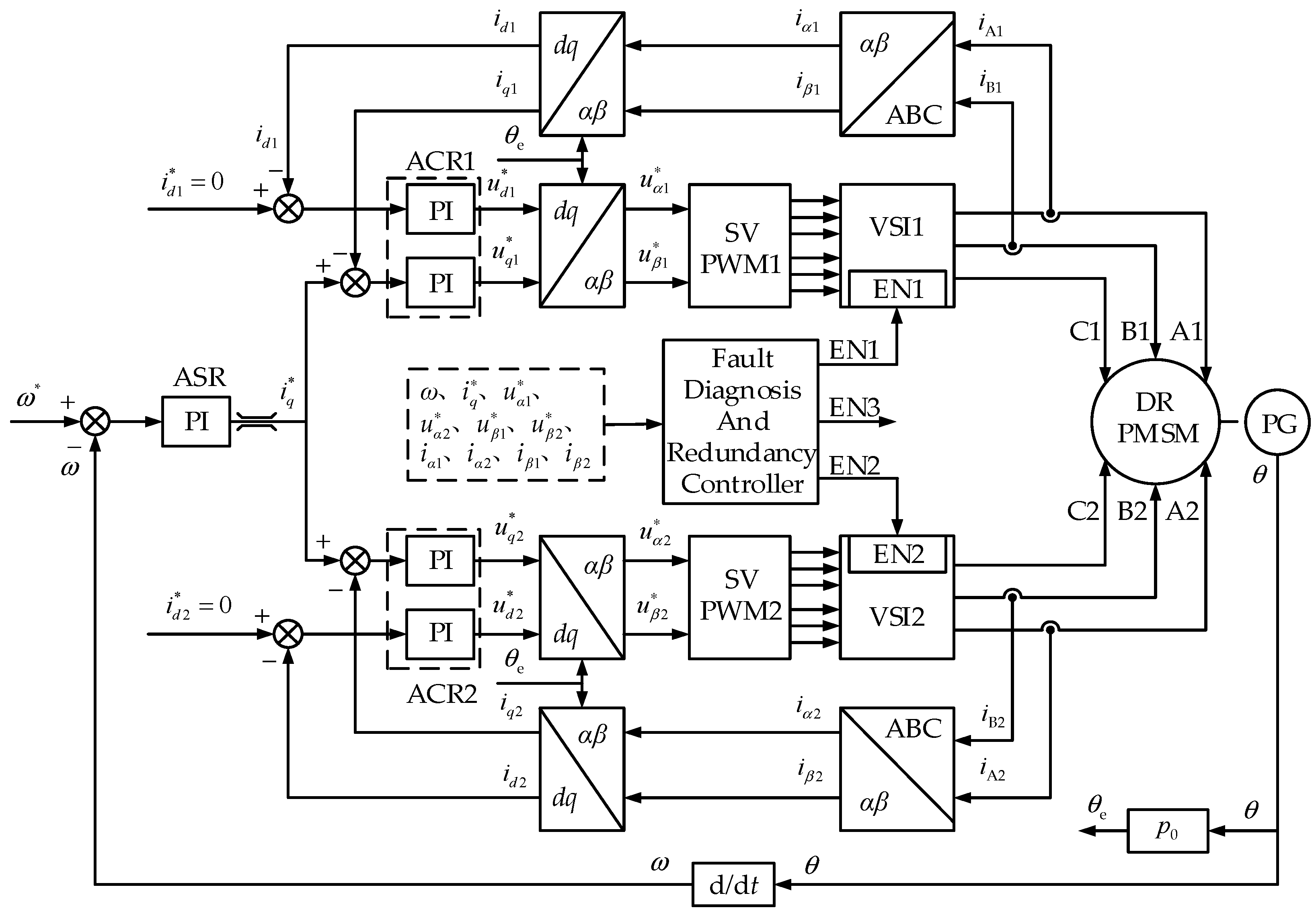
6. Simulation Analysis
The simulation system block diagram of DRPMSM is shown in
Figure 11.
The voltages
,
and
,
represent the voltages
,
and
,
in reality. The formula for calculating the difference of instantaneous reactive power between the normal set and the fault set is given by:
The difference of the instantaneous reactive power
between two sets can be obtained during system sampling period. If the average value of
is got during the latest
K periods and
K is big, Equation (36) can be obtained:
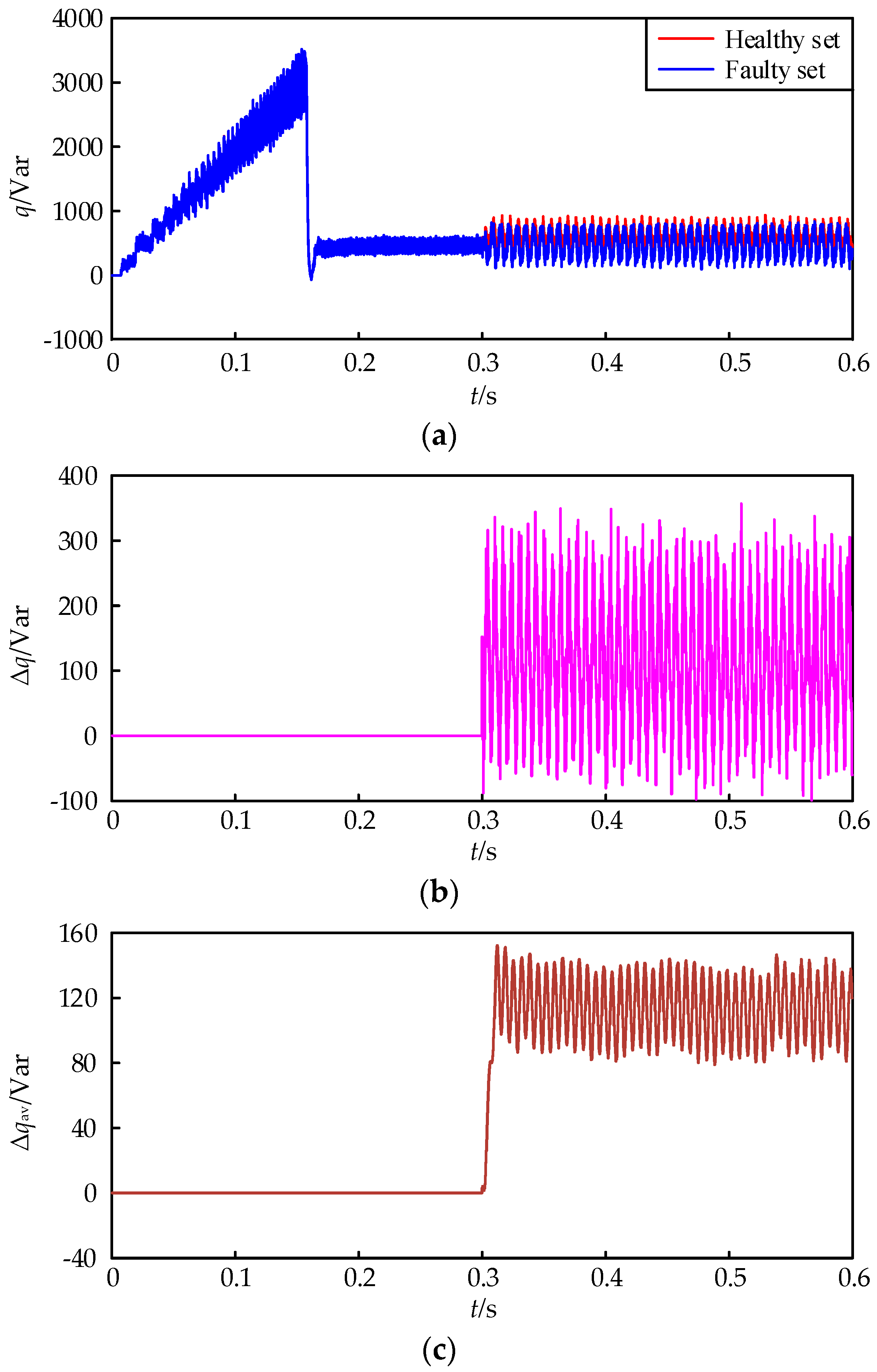
The positive and negative of the average value can be treated as the diagnosis characteristic of the ISCF. The rated speed of the motor is 1200 r/min and the rated frequency is 100 Hz, which means the rated electrical period is 0.01 s. The value of K is the number of data collected within 0.01 s, which means the rated electrical period is set as the sampling calculation period. And the average value of these data is taken as the fault diagnosis characteristic to judge which set of winding is faulty in real time. When the average value is positive, the ISCF occurs in the second set of windings; conversely, the ISCF occurs in the first set.
When the coils of 10 turns in the 12th tooth (phase C2) are shorted at 0.3 s (speed: 900 rpm, load torque: 20 N·m), the instantaneous reactive power curve are shown in
Figure 12. According to
Figure 12c, the average value is positive, so it is diagnosed that the ISCF occurs at the second set. The simulation system can be used to further analyze the factors affecting the difference of reactive power when ISCF occurs under the electrical operation condition.
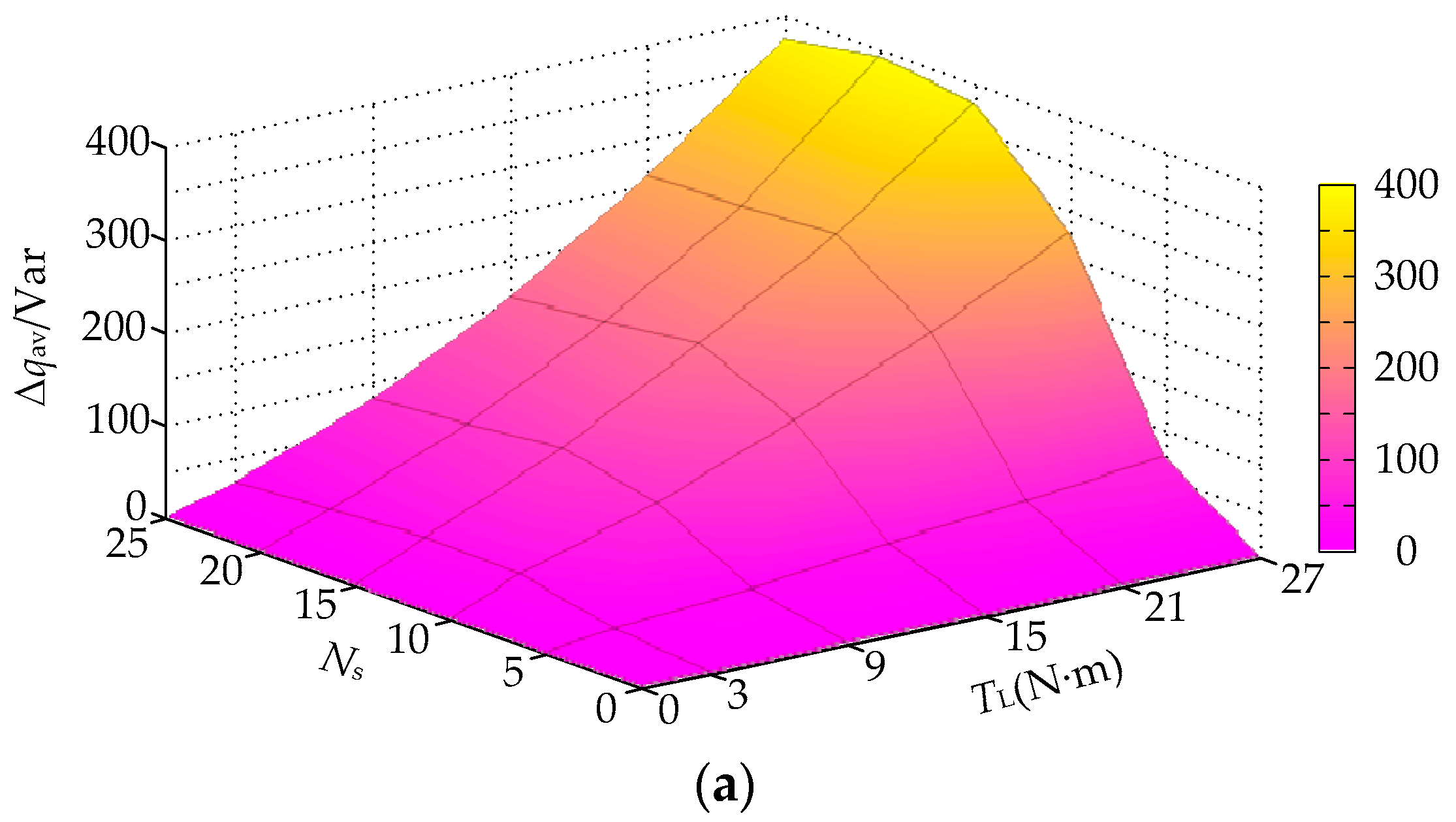
It can be seen from Equation (30) that the value of
is related to four factors such as the load, the number of short-circuit turns, contact resistance, and the speed. The values of the four variables are selected separately, and the obtained
are recorded. The results are shown in
Figure 13 to observe the influence trend of different factors:
(1) The load
The larger the load is, the larger the value
is. As can be seen from Equation (30), both parts of
are positively correlated with the current
, so the value of the fault characteristic gradually increases as the load increases. The simulation results reflecting these trends are shown in
Figure 13a–c.
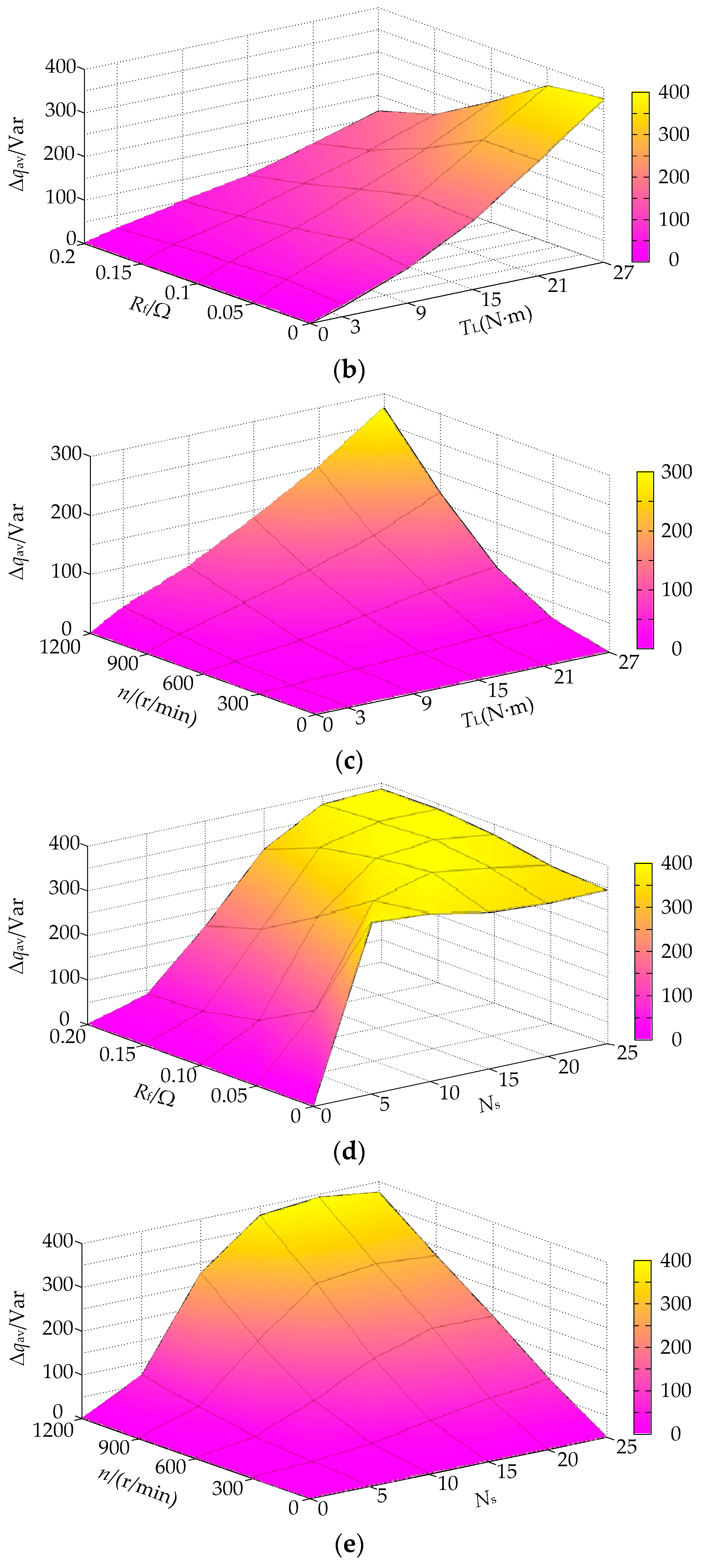
(2) Number of short circuit turns
It is known from Equation (30) that in the case other factors are constant, when the number of short-circuit turns is small, the contact resistance is bigger than the reactance of short-circuit turns. In addition,
and
are small, so the value of
is small. On the other hand, the current flowing through the contact resistance is small on condition that the small number of short-circuit turns, so the motor operates nearly at the normal state and
is small. As the number of short-circuit turns increases,
and
increase, and the value of short-circuit turns reactance gradually approaches that of the contact resistance. Through the Equation (31), as
increases,
increases. When the number of short-circuit turns is big, its reactance approaches or even exceeds that of the contact resistance, which means the ISCF has been very serious. The value of
approaches the maximum value of
, and
maintains a large value. However, since the value of
gradually reduces during this process, the value of the fault characteristic may be reduced when the number of short-circuit turns is large. The entire process of change is like a curve “S” similar to the magnetization curve. The results are shown in
Figure 13a,d,e.
(3) Contact resistance
When the contact resistance is larger than the reactance of short-circuit turns, the fault is light, and the conductors of coils are just beginning to contact, so
is small. As the fault gradually deteriorates, the adhesion between the coils becomes more and more serious, and the contact area becomes larger. As a result, the contact resistance becomes smaller, and the short-circuit becomes serious, so
maintains a large value. The results are shown in
Figure 13b,d,f.
(4) The speed
When the load is constant and the speed is low, it is known from the Equations (10) and (11) that
and
are both small, and the value of
is small, so the value of
is small. With the speed increasing, the values of
,
and
increase gradually, so
increases. The results are shown in
Figure 13c,e,f.
The value of the fault characteristic is affected by the number of the load, short-circuit turns, the contact resistance and the speed from the above analysis. Those factors should be considered comprehensively when setting the threshold value of the fault characteristic. When the threshold set is larger, the fault of short-circuit can be diagnosed only if a certain load and a high speed. So, the rapidity of diagnosis is affected. If the threshold is smaller, the fault may be misjudged due to calculation error and external interference. The threshold can be set as a function related to the load (or ) and the speed, with different standards for the real-time operating conditions.
7. Experiments
In order to verify the feasibility of the online diagnosis method after the ISCF proposed in this paper, the experimental system shown in
Figure 14 was established. The experiment adopts the TMS320F2812DSP, and the load torque is provided by the magnetic powder brake. The speed in the experiment is 600 rpm, and a 10-turn coil around the 12th tooth is short-circuited. The contact resistance is 0.1 Ω, and the load torque is 16 N·m. In the experiment, DSP collects signals of
and
and transmit them to CAN, by which they are delivered to the host computer. Then the data can be exported and processed to establish the curves.
When the load torque is 16 N·m, the experimental results of the instantaneous reactive power are shown in
Figure 15. In order to show the difference between the experimental results of the inter-turn short circuit fault and the normal condition, we add the
between two sets of windings under the normal operation in the
Figure 15c. It is clear that
fluctuates around 0 when the motor is in normal operation, and
is obviously greater than 0 when the motor fails.
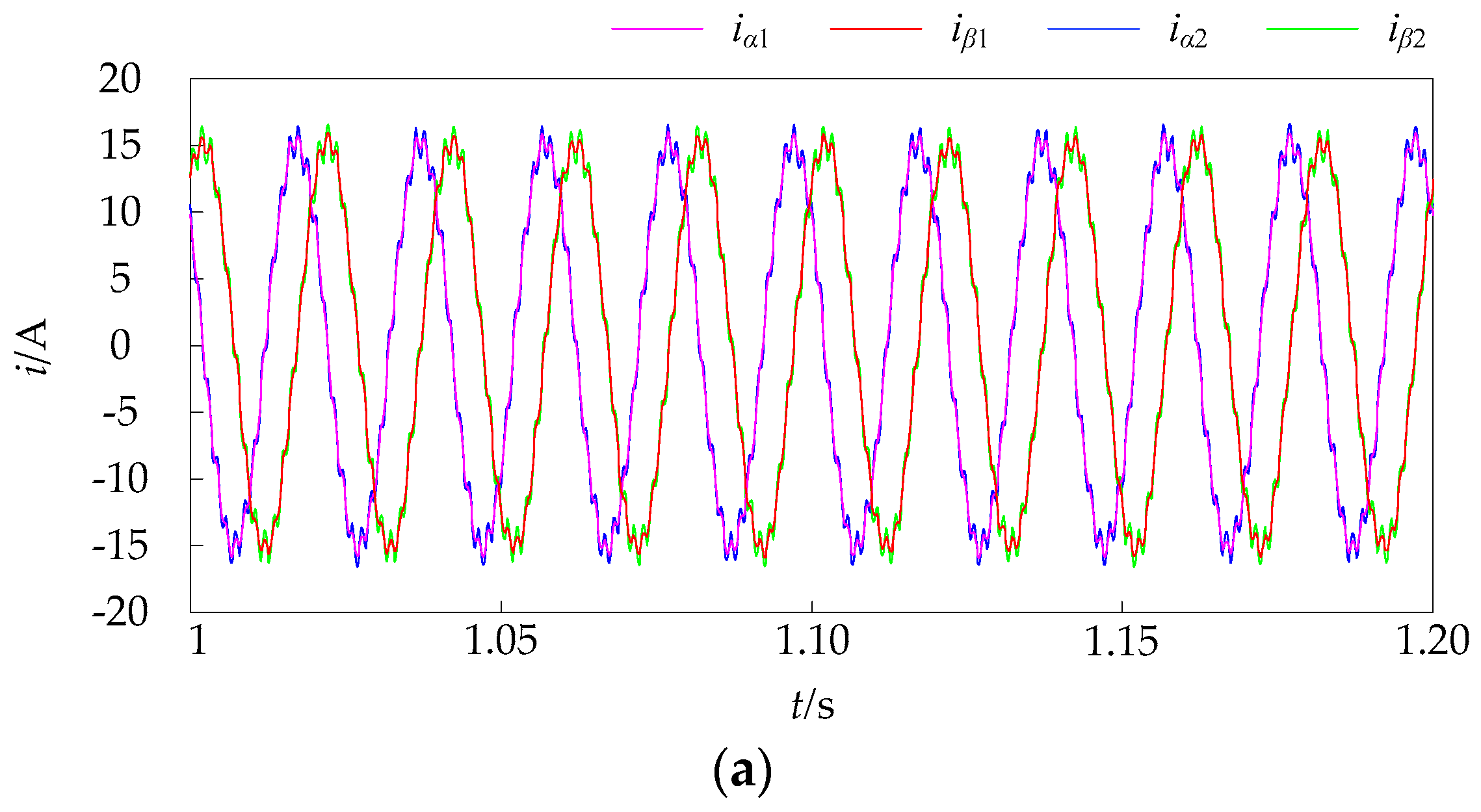
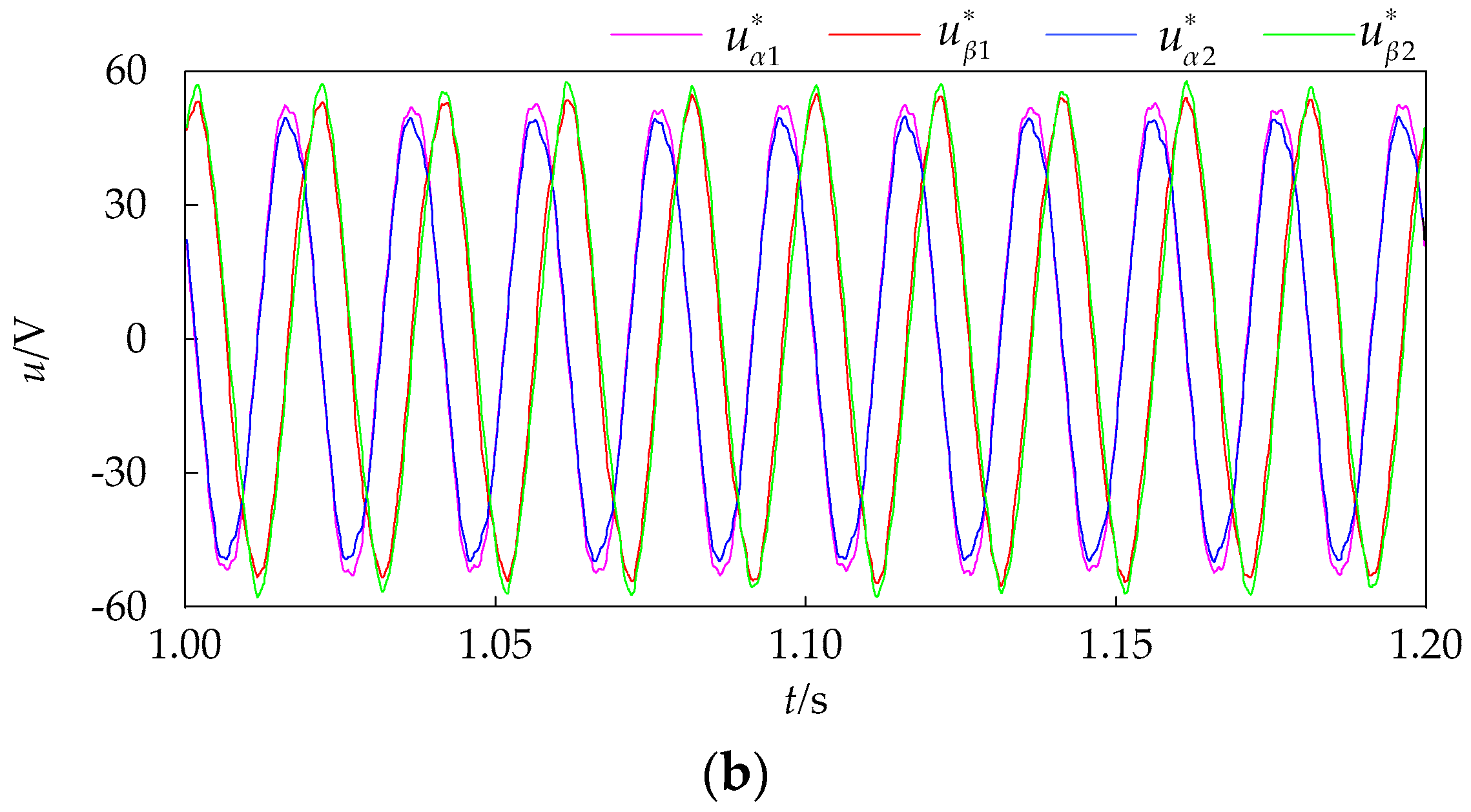
In order to observe clearly, the waveforms in 10 electrical cycles (1.00~1.20 s) in the experiment are selected. The experimental result of
are shown in
Figure 16.
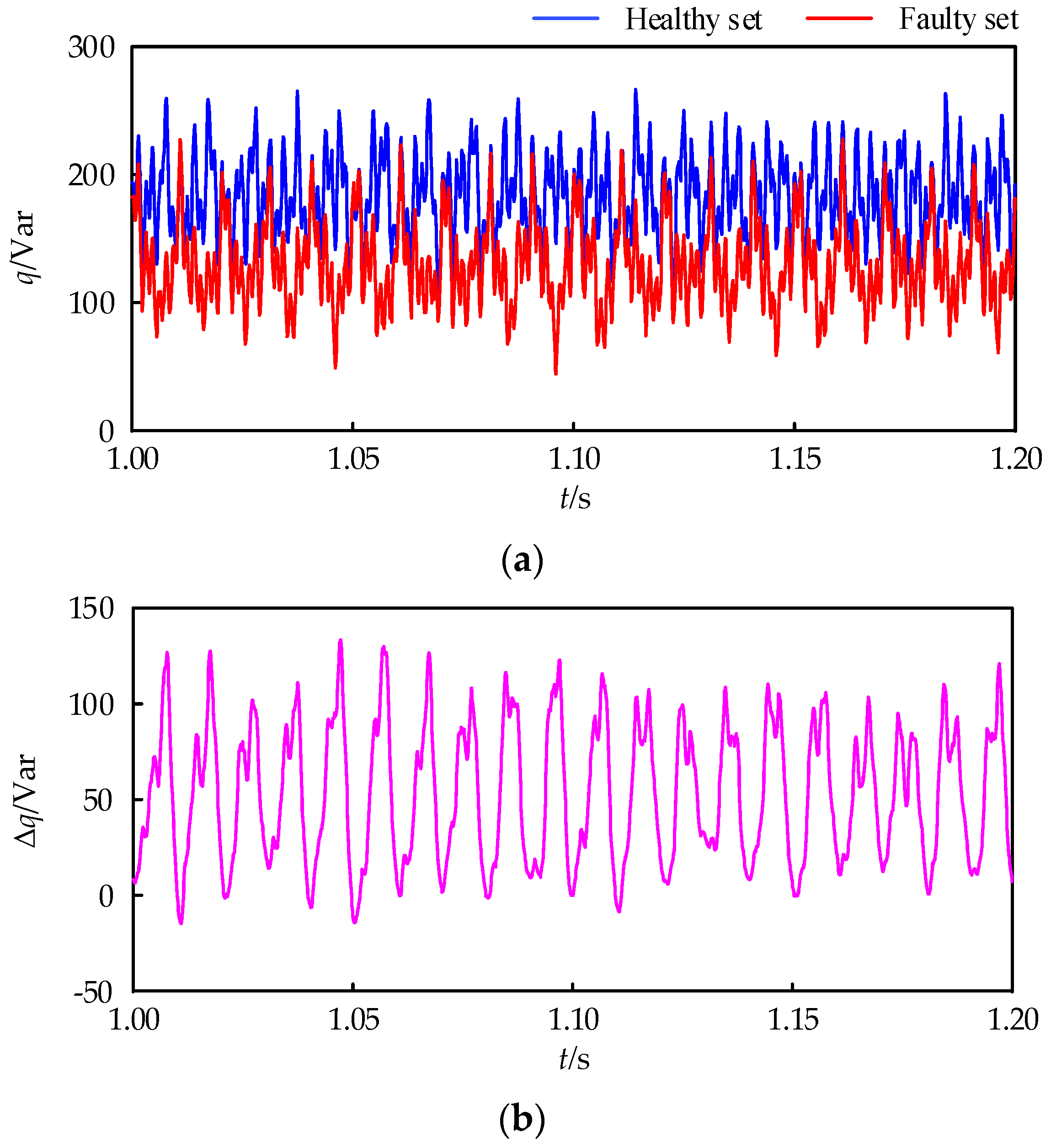
The waveforms of the instantaneous reactive power
q and the difference of instantaneous reactive power
between the two sets in 10 cycles are shown in
Figure 17. In
Figure 17b, the harmonic at the double frequency (100 Hz) is the main part, it is mainly caused by the negative sequence component of fundamental current and the third harmonic currents whose phase differences are
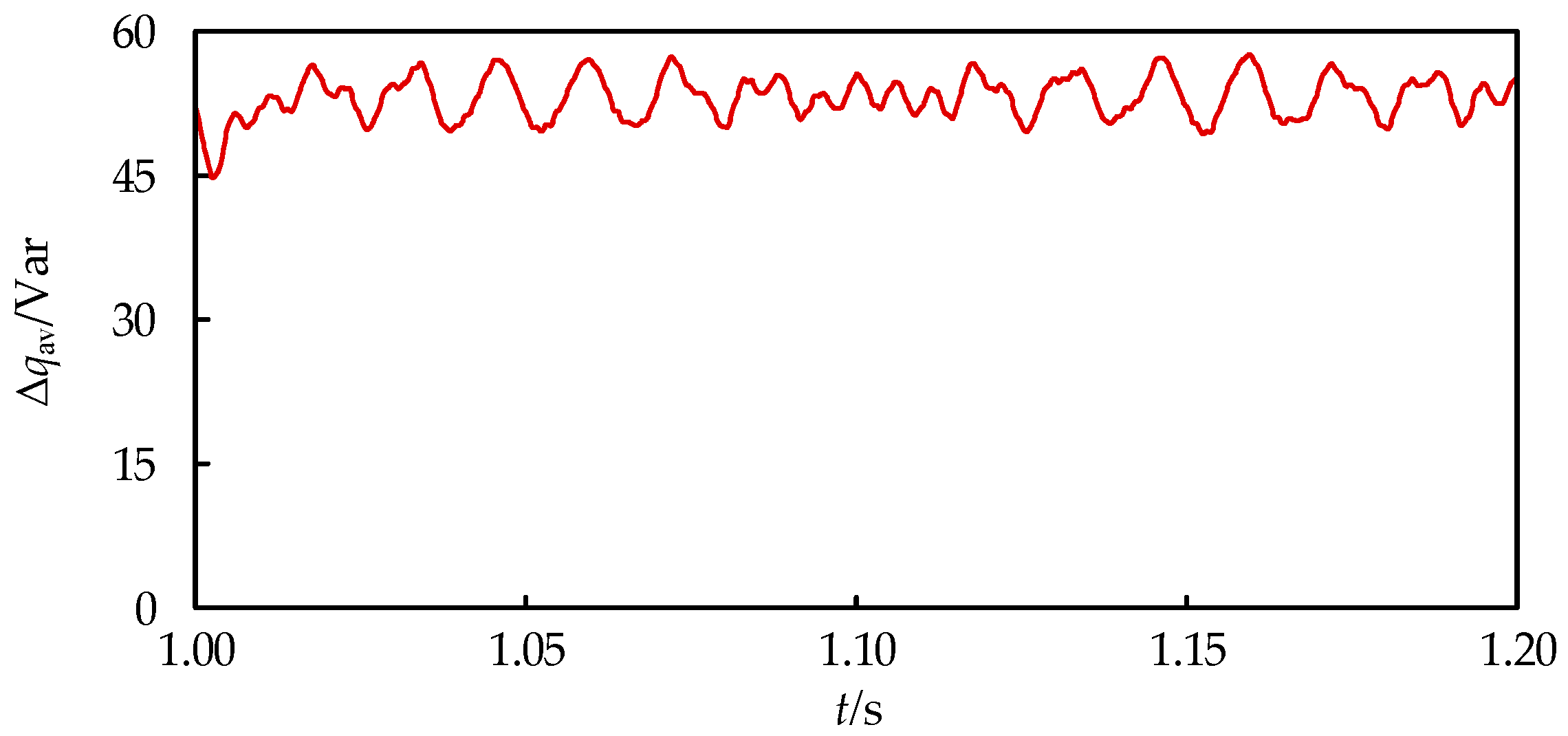
electrical angle after inter-turn short circuit. The average value of
during this process is calculated with the period of 0.01 s shown in
Figure 18. It can be concluded that when ISCF occurs,
is positive.
From the theoretical analysis, simulation and experimental verification of the above sections, it is feasible that the method of an online diagnosis for the ISCF of the DRPMSM based on instantaneous power theory proposed in this paper.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}