1. Introduction
The necessity of eco-friendly vehicles has been highlighted owing to environmental pollution and depletion of fossil fuels. Global electric car stocks are growing rapidly, crossing the 3 million vehicle threshold in 2017. The estimated demand for electric vehicles by 2030 is 100 to 140 million. The core of an electric vehicle is the electric powertrain, which consists of a traction motor, a reduction drive, an inverter, and a power delivery module. Permanent magnet synchronous motors (PMSMs) have been mainly used as a traction motor for electric vehicles because they have high efficiency and high output power density characteristics.
Several studies have been conducted on the PMSMs used in electric vehicles that require various characteristics such as torque, efficiency, and harmonic distortion (THD). Optimal design is essential to satisfy the various design requirements of PMSM at once. Optimal design is a method of finding the values of design variables to obtain an optimal solution within a range of constraints. The optimal design for PMSMs is created by combining design methods such as the analytical model, magnetic equivalent circuits (MEC) model, and finite element analysis (FEA) with optimal design algorithms [
1,
2,
3,
4,
5,
6,
7,
8]. First of all, there are studies on optimal design using the analytical model [
1,
2]. In [
1], the optimal design of a PMSM based on the magnetic field analytical model was determined. The objective function used in that study consisted of efficiency, electrical time constant, and mechanical time constant. The experimental results showed that the efficiency increased by 1%. To minimize torque ripple, a novel analytical solution of a PMSM was proposed [
2]. The stator current was optimized considering magnetic saturation using an analytical expression. The following are studies on optimization using the MEC model [
3,
4]. In [
3] it was reported that the MEC optimization method combined with an optimization algorithm can optimize the volume and energy loss of a PMSM. A novel MEC model of a PMSM to obtain the maximum efficiency, minimum weight, and price was developed [
4]. K-means clustering algorithm was utilized to obtain the best solution out of the eight clusters. Finally, some research on optimization combined with FEA have been published [
5,
6,
7]. The work in [
5] performed multi-objective shape optimization of a PMSM based on FEA and particle swarm optimization algorithm. Five rotor topologies were compared, aimed at efficiency, flux-wakening rate, and price. The work in [
6] proposed an optimization process of a PMSM to optimize the weight, output power, and suitability. It performed shape optimization of permanent magnets and rotor core using FEA with the fuzzy inference system strategy. Using a novel memetic algorithm, an optimal design based on FEA to minimize torque ripple in a PMSM was created [
7]. In [
8], multi-physics and multi-objective optimization of a PMSM based on FEA and analytical magnetic model were studied. Although the FEA optimization method combined with optimization algorithm has the highest accuracy, it has high computational cost [
5].
There are two main ways to optimize design variables: To combine the optimal algorithm with design methods directly and combine the optimal algorithm with the metamodel from the results of design of experiments (DOE). Metamodel is a mathematical model that approximates the relationships between design variables and responses. DOE is an application of statistics aimed at designing experimental methods and analyzing the results to identify relationships between design variables and responses. First, directly connecting the optimal algorithm with the design methods can determine the best solution more clearly [
9]. However, this method takes a long time to optimize and it is difficult to predict the design time. Additionally, if the formulation of the optimal design is wrong, it is difficult to find the best solution. In the case of optimization by creating metamodels using DOE results, it is possible to predict the optimal results by analyzing the sensitivity between design variables and target goals. In addition, the time taken for the optimization design is clear. However, the number of DOE and test points must be selected properly, and the metamodel must be made correctly. Meanwhile, non-automated DOE requires a lot of effort and time because mechanical modeling and analysis must be performed as many times as DOE. Although a large number of DOEs are required to achieve good optimal design results, it takes a significant amount of effort and time. The work in [
10] reported optimization results using response surface methodology combined with metamodels from the DOE results. To produce DOE results, a total of 15 models were made and 15 FEAs were conducted. The study in [
11] optimized a PMSM by combining an optimal algorithm and metamodel, i.e., the genetic algorithm and the Kriging model, based on DOE. In that study, to obtain the DOE results, several models had to be designed and FEAs were required.
The novelty of this distinguishes it from previous studies for the following reasons: First, optimal design can be easily processed based on a novel automated DOE procedure based on FEA, so it can be done faster and more accurately. In general, DOE by FEA consists of modeling process using CAD tools, analysis condition setting process for FEA, FEA process, and post process for extracting and organizing results. To obtain a reliable optimal design result, a large number of DOE have to be carried out. However, the conventional method of manually performing the process was complicated and time consuming, and thus the number of DOE was limited [
10,
11,
12,
13,
14,
15,
16,
17,
18]. However, using the automated DOE process proposed in this study, not only can the DOE be easier but also the number of DOE can be dramatically increased, resulting in high reliability of the optimal design result. The proposed automated design method is expected to reduce the design cost and time. Moreover, it can be used to find the optimal solution for various design problems as well as PMSMs. In addition, since the proposed procedure is based on commercial tools, it has a ripple effect that can easily apply optimal design in academia and industry.
Most of the previous studies have been applied to optimal design using metamodel generated in one way. There have been a lot of optimizations recently using a single metamodeling technique such as Kriging and response surface method [
10,
11,
12,
13,
14,
15,
16,
17,
18]. However, since a suitable metamodel is different according to each design problem and condition, it is necessary to select the best metamodel through accuracy evaluation after generating several metamodels. This is because the accuracy of the metamodel must be high to obtain good optimal design results. In this study, metamodels of objective functions and constraints are generated in 11 ways, and the most accurate metamodels are selected through the root mean squared error (RMSE) test, respectively.
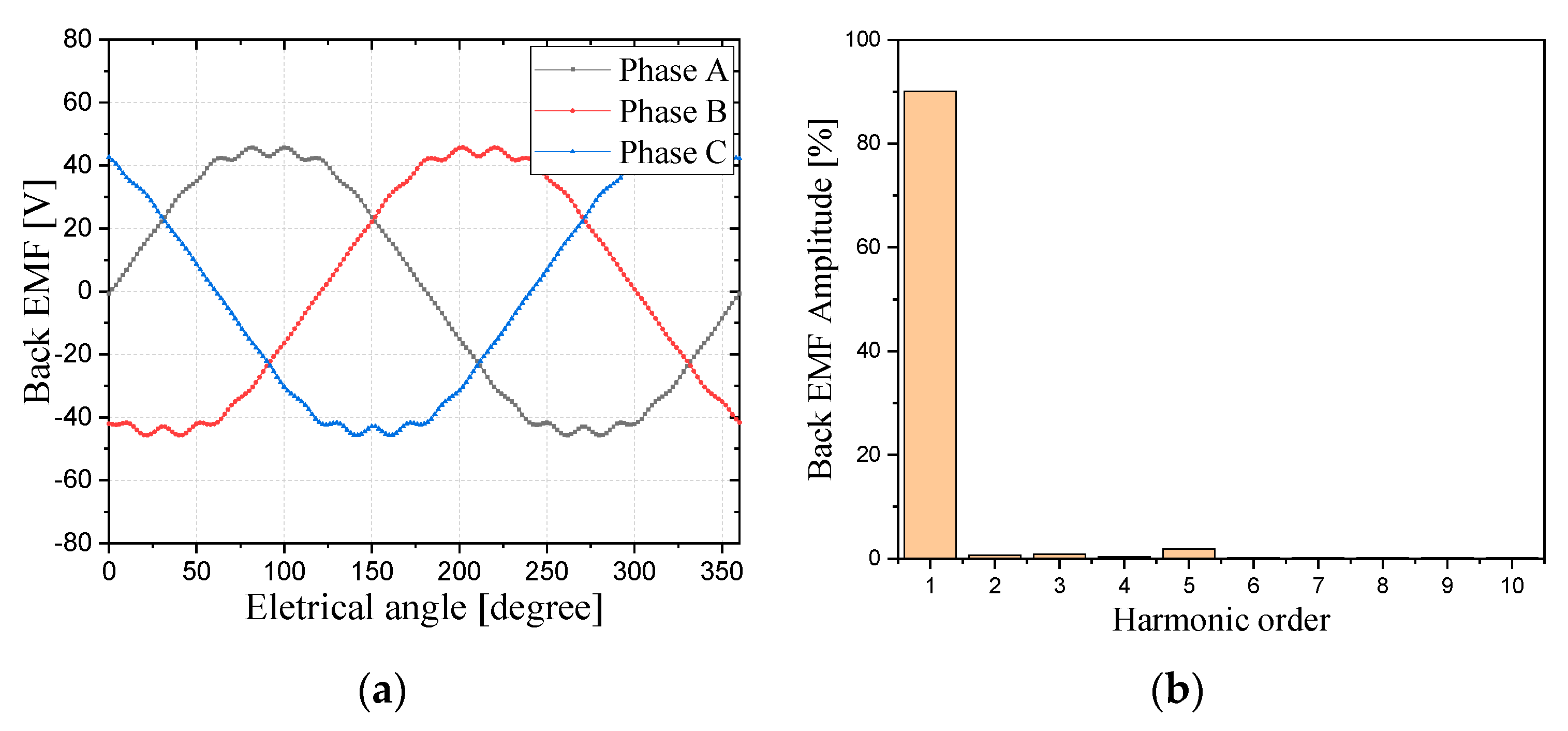
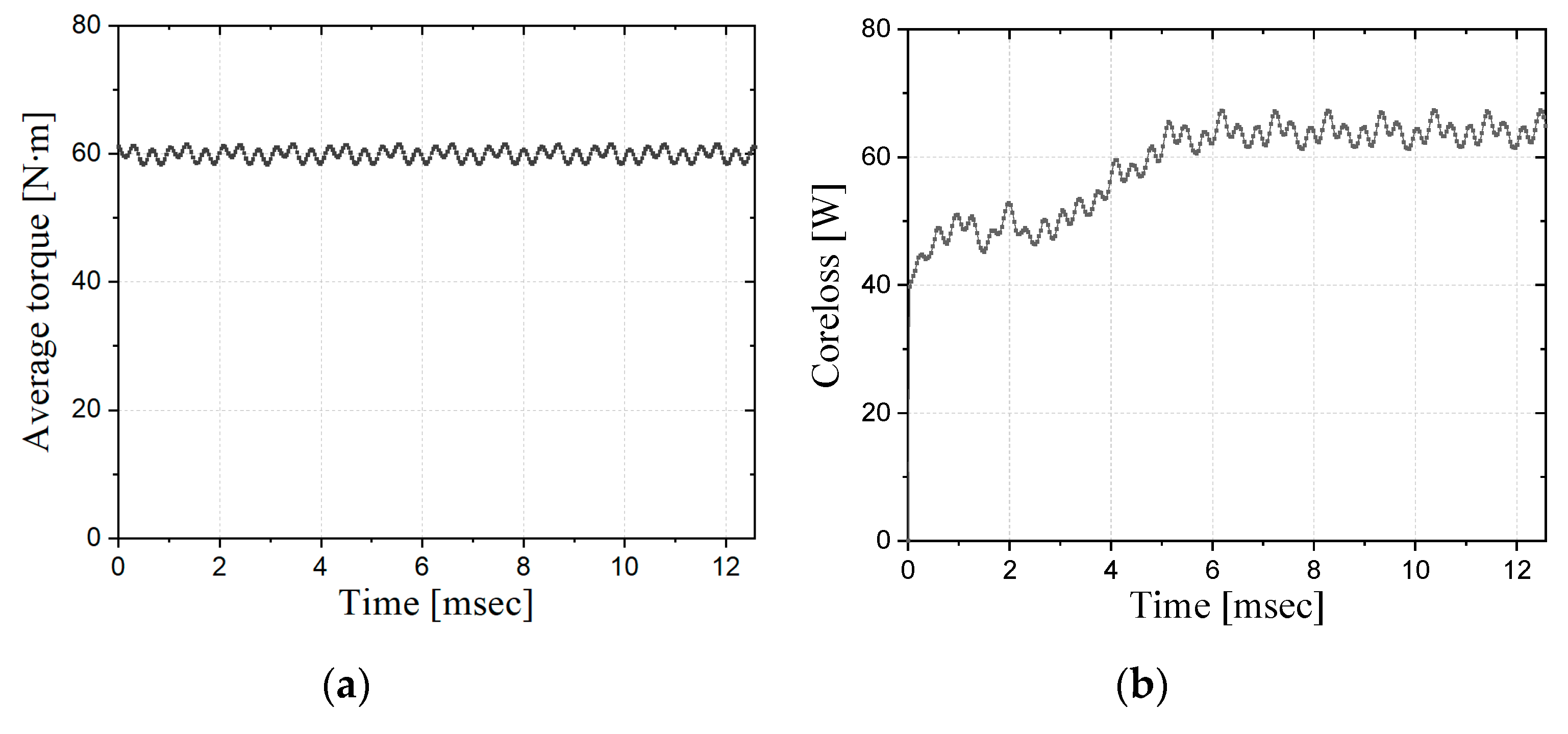
In this study, shape optimization is performed for a PMSM to maximize the torque while maintaining efficiency, torque ripple and THD in the back electromotive force (EMF). First, the design target specification of a PMSM for small electric vehicles is established, and the characteristics of the initial model are analyzed using FEA. To improve the accuracy of the design results, DOE is performed using FEA. After the creation of metamodels using the DOE results, the optimal values are obtained by the optimal algorithm. The optimal Latin hypercube design (OLHD) technique [
19] is applied for the DOE, and the appropriate DOE number and test point number are selected to produce accurate metamodels. To perform DOE easily and accurately, this study proposes an automated DOE procedure through linkage between an FEA program and an optimal design program. Using the DOE results, the relationship between the design and output variables are analyzed by screening. To generate an accurate metamodel, the RMSE tests are performed on eleven metamodels for each output variable, and the best metamodels are selected for each output variable. Optimization based on metamodels is performed, and the global optimization algorithm hybrid metaheuristic algorithm (HMA) [
20] is utilized as the optimal algorithm. The overall process of this study is represented in a flowchart, as shown in
Figure 1.
4. Conclusions
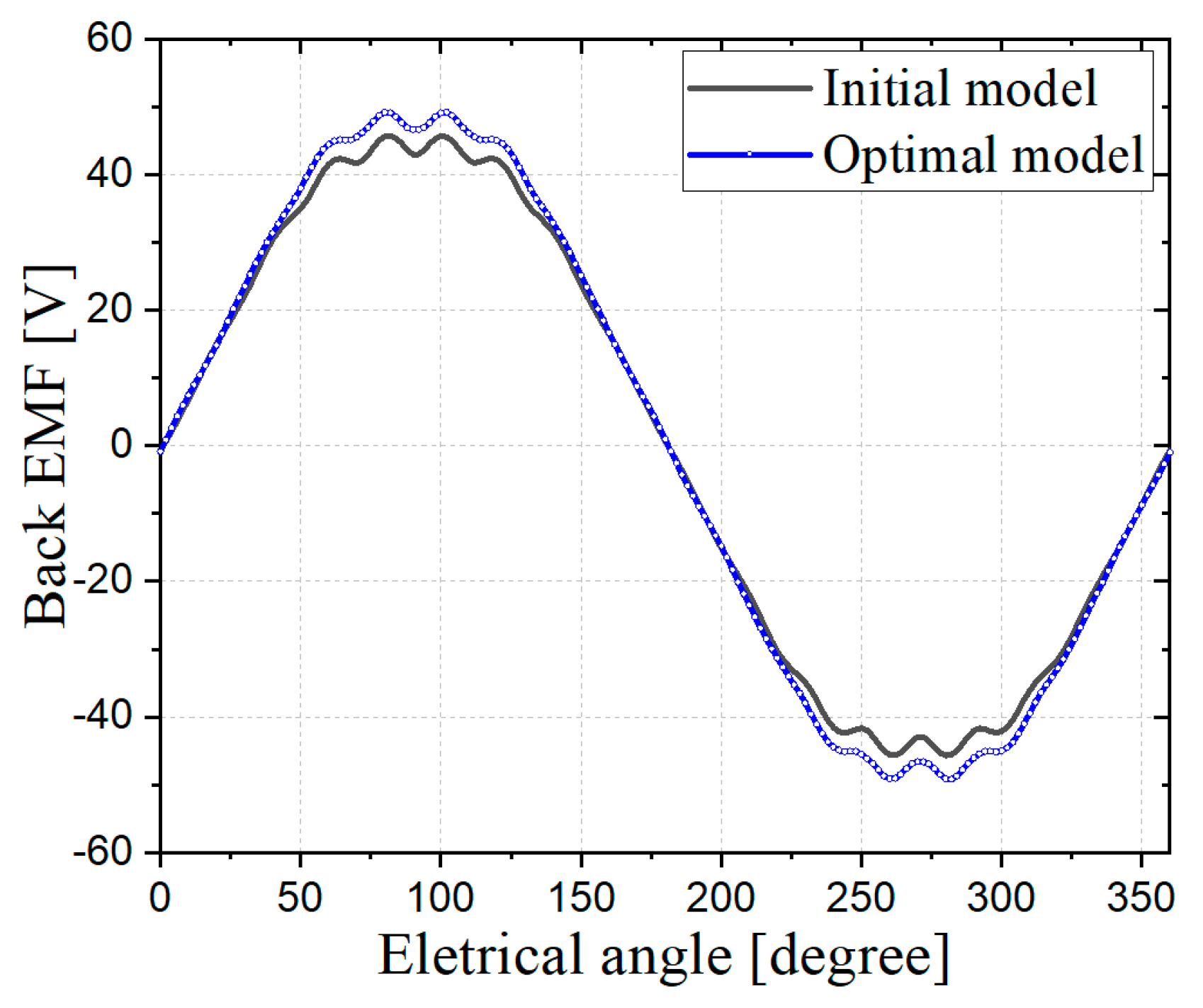
This paper presented shape optimization of a PMSM for small electric vehicles to maximize torque while maintaining efficiency, torque ripple and THD of the back EMF. To improve the accuracy of the optimal design results, DOE was performed using FEA. This study proposed an automated DOE procedure through linkage between an FEA and optimal design programs to perform DOE easily and accurately. Parametric modeling was performed for the FEA model to change the shape variables automatically, and automation-related files were created using Maxwell’s Macro function. In addition, an interface was established to link the FEA program with PIAnO, an optimal design program. Using the built-in automation program, 50 FEAs for the experimental points selected by OLHD were easily performed. From the DOE results, the relationship between the design and output variables was analyzed by screening. Among the five design variables, the barrier length was found to have the greatest effect on the output variables. Eleven metamodels were created for each output variable and RMSE test was conducted to evaluate the predictive performance of the metamodels. Consequently, the metamodels with the best predictive performance for each output variable were selected. Finally, the optimization design based on the metamodel was determined using the HMA to find the global optimum. The objective average torque improved by 2.5% over the initial model while satisfying all the constraints. The optimal design results were finally verified by FEA.
The proposed automated design method is expected to reduce design cost and time. Moreover, it can be used to find the optimal solution for various design problems as well as PMSMs. By following the procedure given below, the proposed optimal design method can be applied to any type of motor without any special constraints. First, in order to change the shape of the optimum design variable automatically, the dimension of the optimal design variable should be set using Maxwell’s parametric sweep setup function. Next, determine the values that you want to extract from Maxwell and create vbscript and batch files to extract them. Finally, an interface setting must be performed to accommodate Maxwell’s output values in an optimization program called PIAnO.
Optimization of multi-physics systems by simulation takes significant computing time for each simulation run, and its process depends on numerous runs, making it difficult and expensive [
30]. However, using the automated DOE procedure suggested in this study can reduce design cost and time, so I think multi-physics analysis is possible in the near future. In the next project, I will consider multi-physics analysis that takes into account the mechanical and thermal properties.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}