Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization


Abstract
1. Introduction
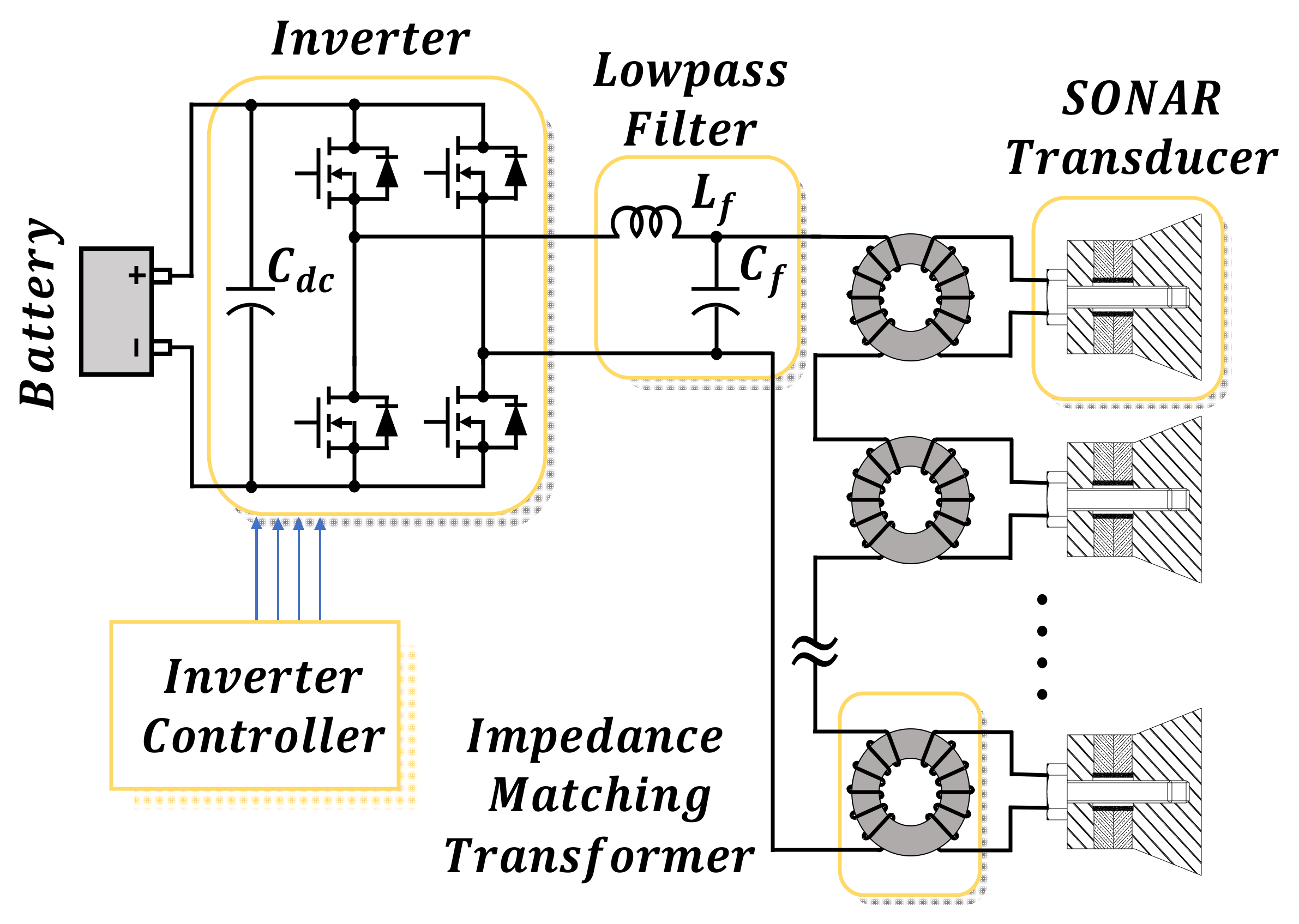
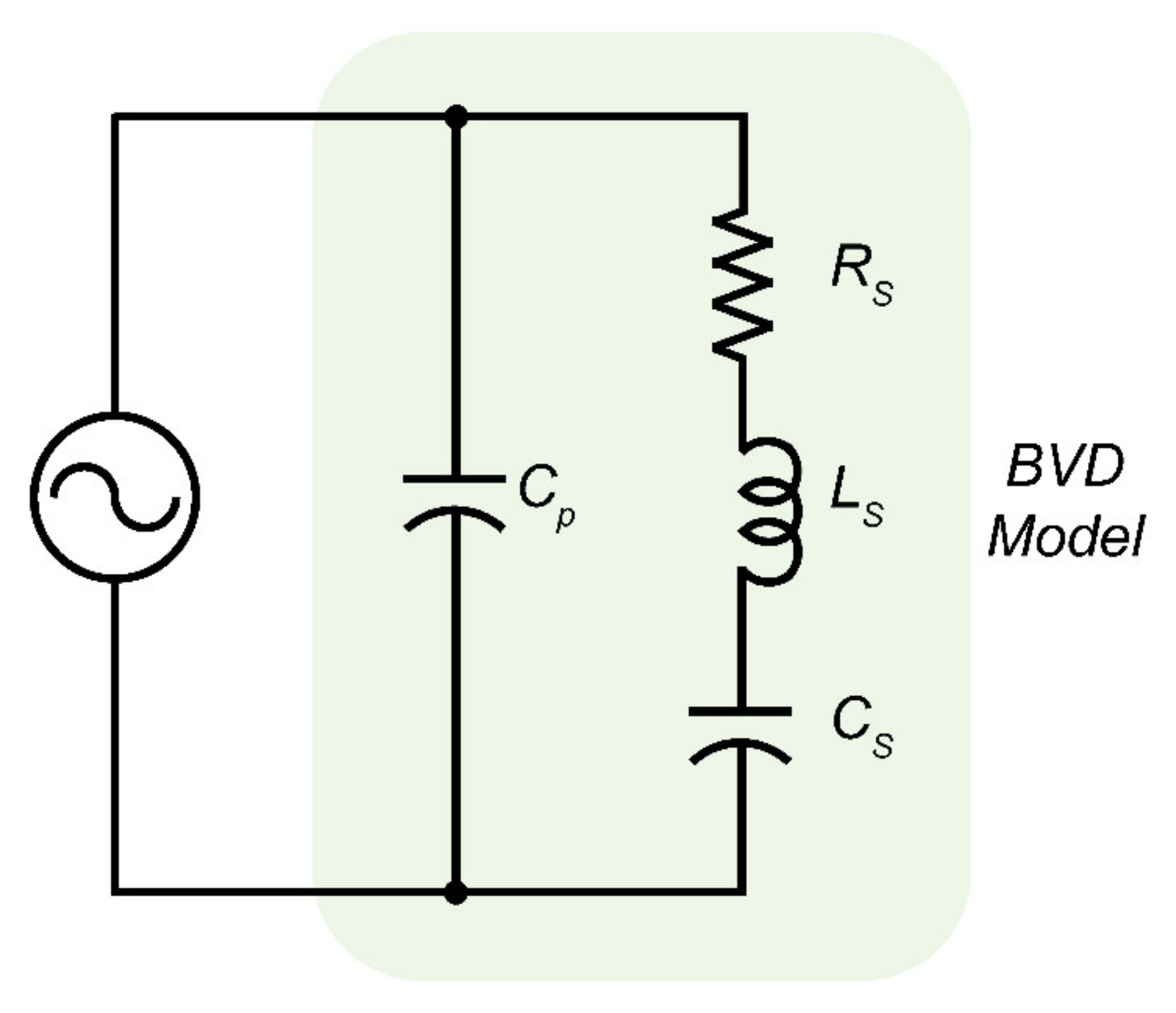
2. SONAR Transducer Power System
3. Design of Low-pass Filter and Impedance Matching Circuit Using Conventional Methods
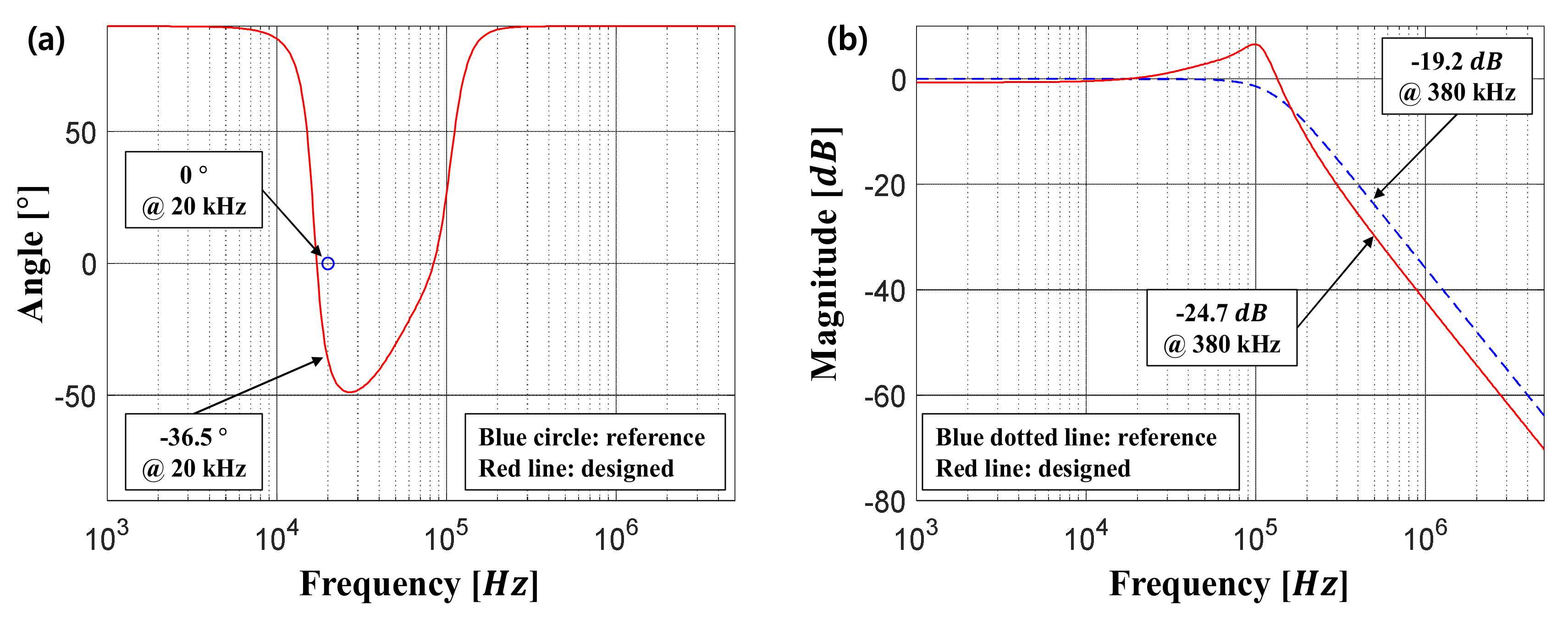
4. Design of Low-pass Filter and Impedance Matching Circuit Using Particle Swarm Optimization
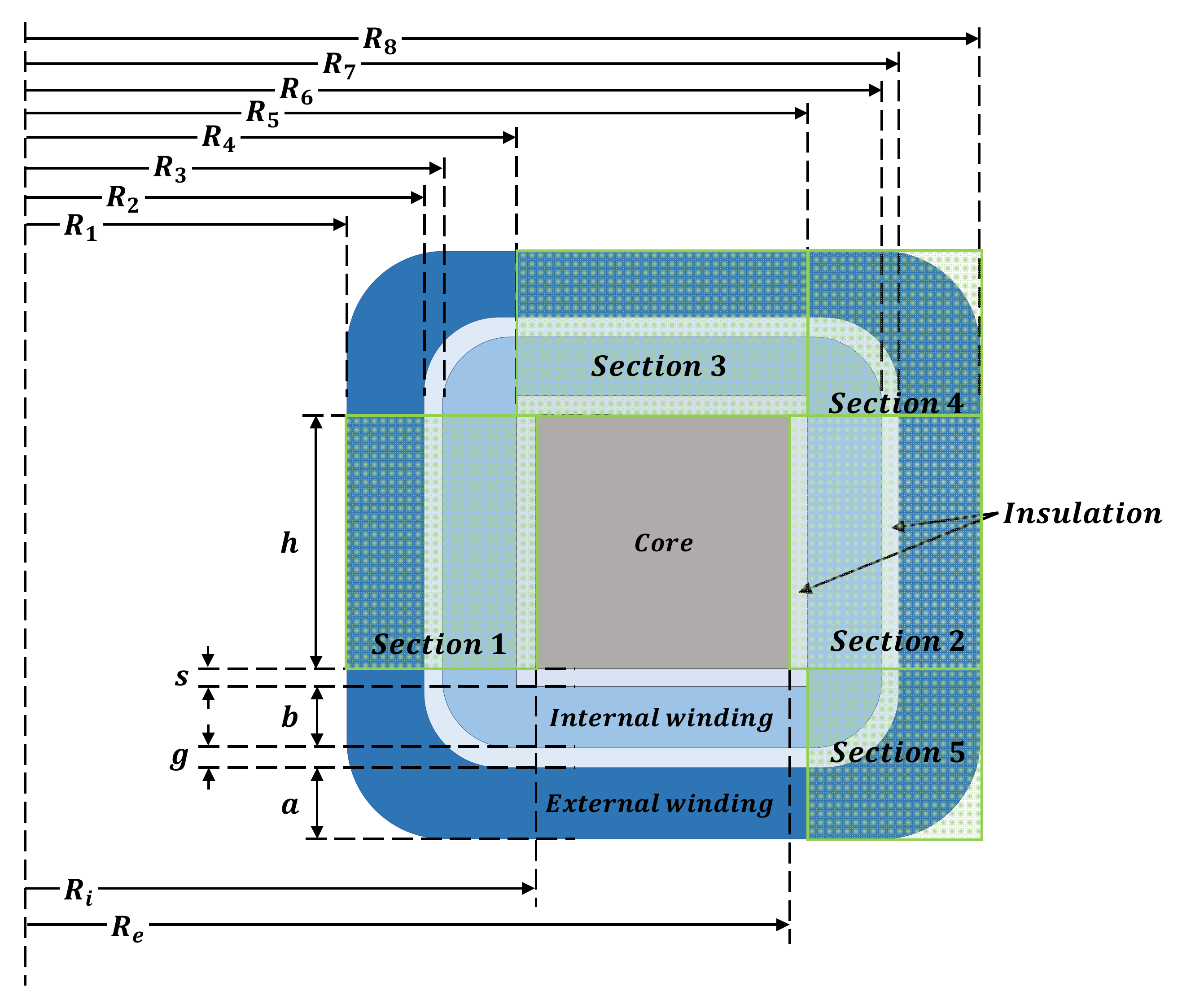
4.1. Calculating Leakage Inductance of Impedance Matching Transformer
4.2. Calculating Wire Resistance of the Impedance Matching Transformer and Filter Inductor
4.3. Simultaneous Design of Low-Pass Filter and Impedance Matching Circuit Using PSO
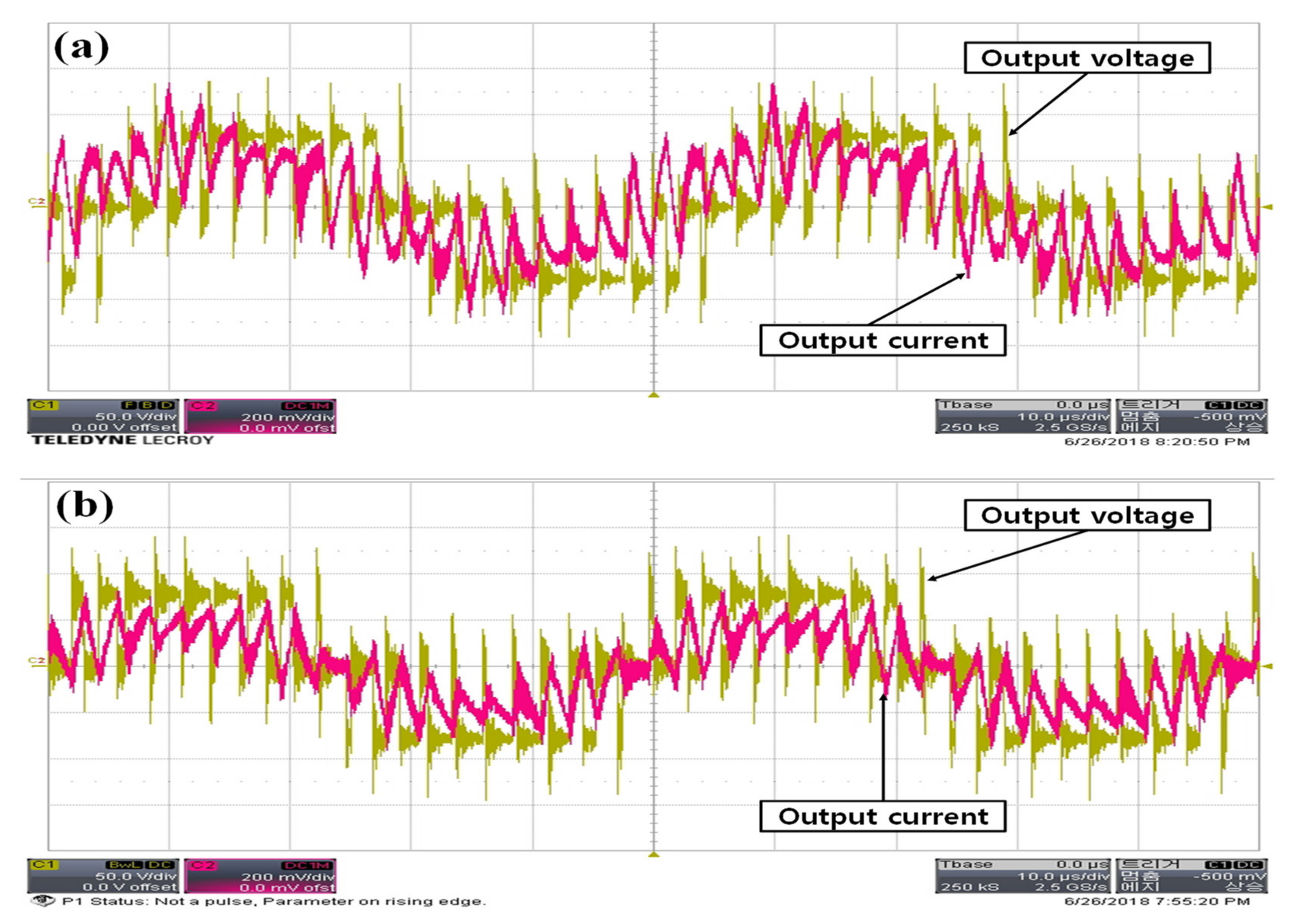
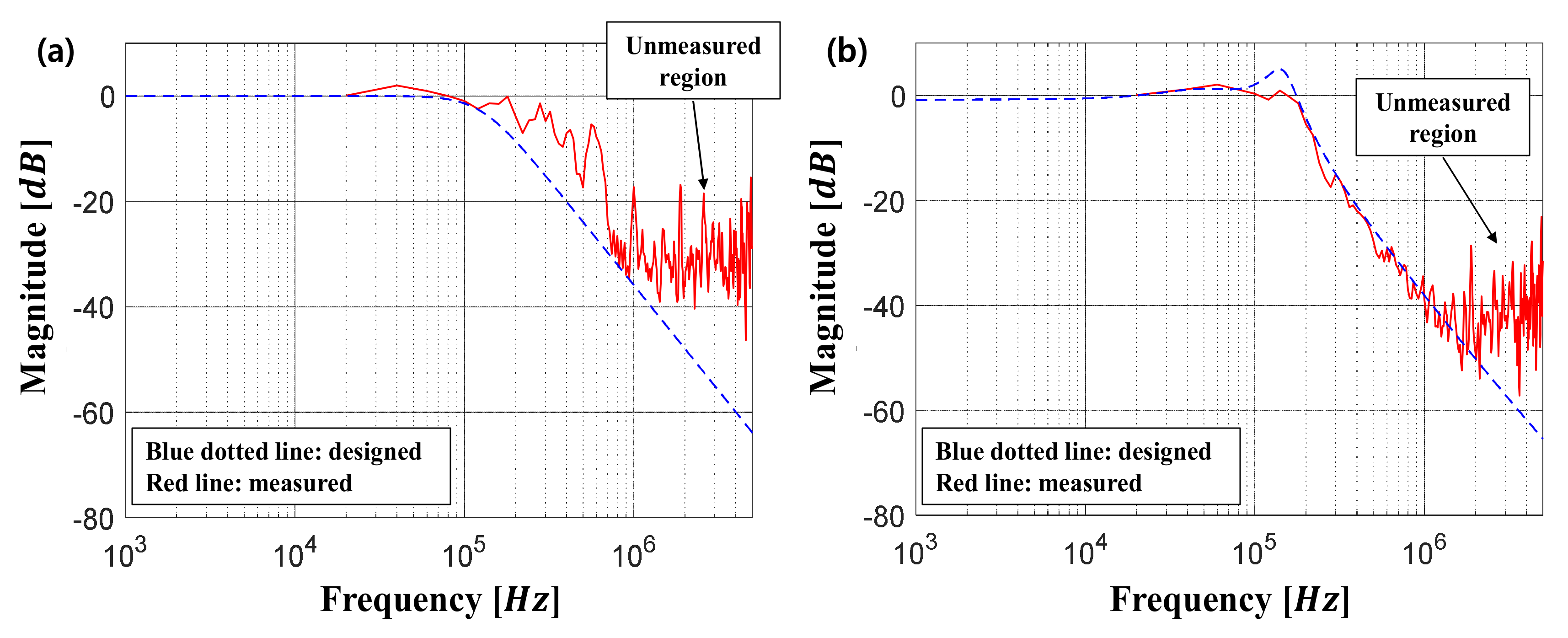
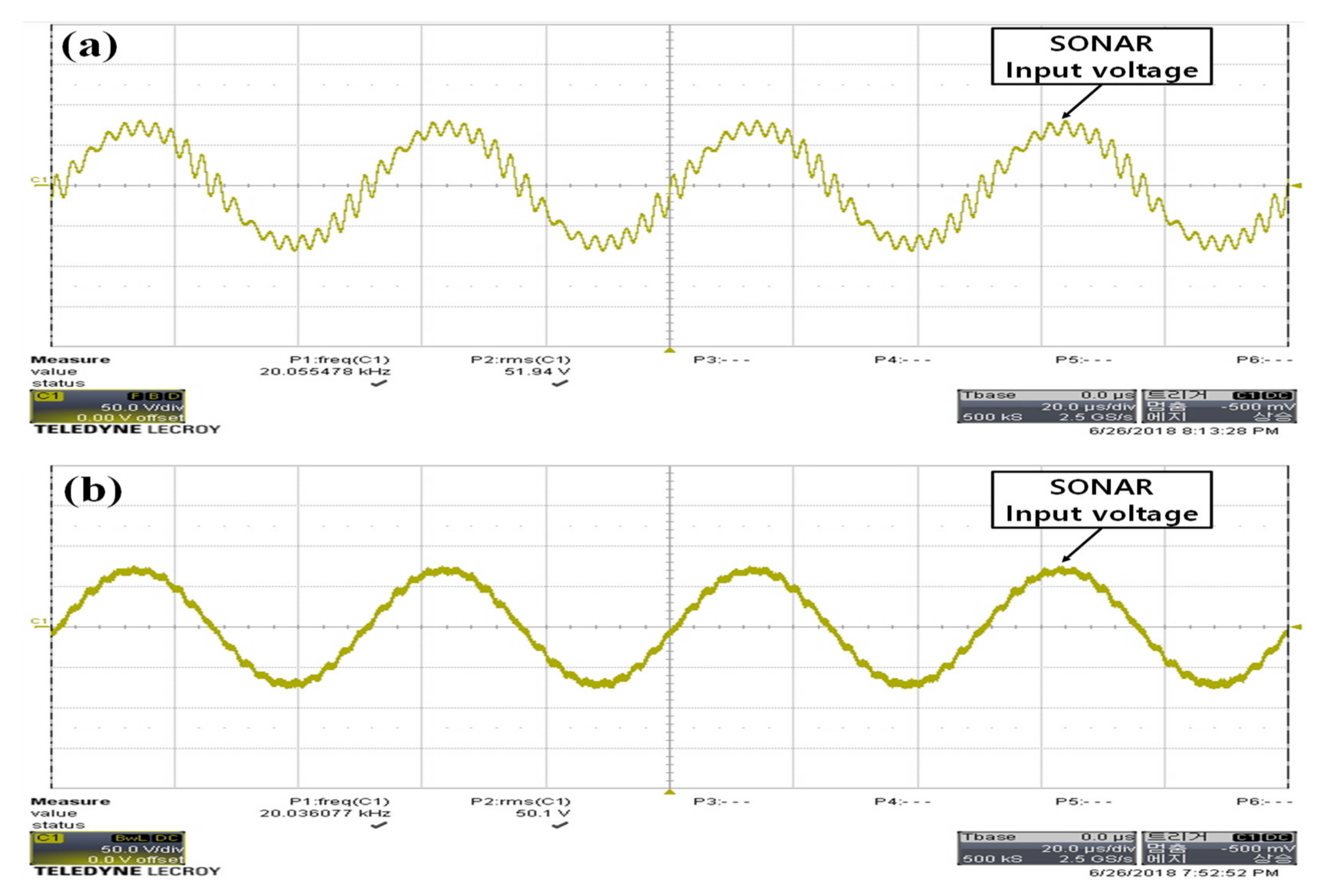
5. Experiments
6. Conclusions
Author Contributions
Funding
Acknowledgments
Availability of Data and Materials
Conflicts of Interest
References
- Mason, W.P. Electromechnical Transducers and Wave Filters; D. Van Nostrand Co.: New York, NY, USA, 1948. [Google Scholar]
- Krimholtz, R.; Leedom, D.A.; Matthaei, G.L. New equivalent circuits for elementary piezoelectric transducers. Electron. Lett. 1970, 6, 398–399. [Google Scholar] [CrossRef]
- Domarkas, V.; Kazys, R.-J. Piezoelectric Transducers for Measuring Devices; Mintis: Vilnius, Lithuania, 1975. [Google Scholar]
- Quek, Y.B. Class-D LC Filter Design; Texas Instruments: Dallas, TX, USA, 2008. [Google Scholar]
- Wood, K.E.; Bush, A.L.; Lindemann, A. New Techniques in the Design of Sonar Power Amplifiers. IEEE Power Electron. Spec. Conf. 1971, 141–146. [Google Scholar] [CrossRef]
- Chacko, B.P.; Panchalai, V.N.; Sivakumar, N. Multilevel digital sonar power amplifier with modified unipolar spwm. Int. Conf. Adv. Comput. Commun. Inform. 2015, 121–125. [Google Scholar] [CrossRef]
- Panchalai, V.N.; Chacko, B.P.; Sivakumar, N. Digitally Controlled Power Amplifier for Underwater Electro Acoustic Transducer. Int. Conf. Signal Process. Integr. Netw. 2016, 306–311. [Google Scholar] [CrossRef]
- Hurley, W.G. Calculation of leakage inductance in transformer windings. IEEE Trans. Power Elec. 1994, 9, 121–126. [Google Scholar] [CrossRef]
- Doebbelin, R.; Benecke, M.; Lindemann, A. Calculation of leakage inductance of core-type transformers for power electronic circuits. Int. Power Electron. Motion Control Conf. 2008, 1280–1286. [Google Scholar] [CrossRef]
- Duppalli, V.S.; Sudhoff, S. Computationally efficient leakage inductance calculation for a high-frequency core-type transformer. IEEE Electr. Ship Technol. Symp. 2017, 635–642. [Google Scholar] [CrossRef]
- Tria Lew, A.R.; Zhang, D.; Fletcher, J.E. High-frequency planar transformer parameter estimation. IEEE Trans. Mag. 2015, 51. [Google Scholar] [CrossRef]
- Hernández, I.; de León, F.; Gómez, P. Design formulas for the leakage inductance of toroidal distribution transformers. IEEE Trans. Power Deliv. 2011, 26, 2197–2204. [Google Scholar] [CrossRef]
- Bennett, E.; Larson, S.C. Effective resistance to alternating currents of multilayer windings. Electr. Eng. 1940, 59, 1010–1016. [Google Scholar] [CrossRef]
- Dowell, P.L. Effects of eddy currents in transformer windings. Proc. IEE 1966, 113, 1387–1394. [Google Scholar] [CrossRef]
- Tourkhani, F.; Viarouge, P. Accurate analytical model of winding losses in round Litz wire windings. IEEE Trans. Mag. 2001, 37, 538–543. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; pp. 1942–1948. [Google Scholar] [CrossRef]
- Bai, Q. Analysis of particle swarm optimization algorithm. Comput. Inf. Sci. 2010, 3, 180–184. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. 1998 IEEE International Conference on Evolutionary Computation Proceedings, IEEE World Congress on Computational Intelligence (Cat. No.98TH8360), Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Value |
|---|---|
| Filter inductor inductance | 121.39 |
| Filter capacitor capacitance | 116.64 |
| Transformer magnetizing inductance | 263.45 |
| Section | Coefficient | |||
|---|---|---|---|---|
| 1 | ||||
| 2 | ||||
| 3 | 1 | |||
| 4 | ||||
| 5 | ||||
| Category | Value |
|---|---|
| Filter inductor inductance | 121.39 |
| Filter inductor wire resistance | 547.1 |
| Filter capacitor capacitance | 116.64 |
| Transformer magnetizing inductance | 263.45 |
| Transformer leakage inductance | 217.36 |
| Transformer wire resistance | 173.4 |
| Category | Impedance Phase (°) @20 kHz | Error (°) | Impedance Magnitude () @20 kHz | Error (%) |
|---|---|---|---|---|
| Design value | −67.94 | - | 757.03 | - |
| Model 1 | −68.2 | 0.26 | 767.5 | 1.38 |
| Model 2 | −68.2 | 0.26 | 767.6 | 1.40 |
| Model 3 | −68.1 | 0.16 | 774.3 | 2.28 |
| Model 4 | −68 | 0.06 | 768.2 | 1.48 |
| Model 5 | −68.1 | 0.16 | 768.5 | 1.52 |
| Mean value | −68.1 | 0.18 | 769.2 | 1.62 |
| Category | Inductance @20 kHz | Mean Error (%) | Capacitance @20 kHz | Mean Error (%) | |
|---|---|---|---|---|---|
| Conventional method | Design value | 101.2 | 0.8 | 15.6 | 3.3 |
| Actual value | 100.8 | 15.1 | |||
| Proposed method | Design value | 121.4 | 116.6 | ||
| Actual value | 120.0 | 120.0 | |||
| Category | Magnetizing Inductance () @20 kHz | Error (%) |
|---|---|---|
| Design value | 263.5 | - |
| Transformer 1 | 282.3 | 7.2 |
| Transformer 2 | 273 | 3.6 |
| Transformer 3 | 274.8 | 4.3 |
| Transformer 4 | 276.4 | 4.9 |
| Transformer 5 | 274.3 | 4.1 |
| Mean value | 274.1 | 4.8 |
| Category | Impedance Phase (°) @20 kHz | Error (%) | Impedance Magnitude () @20 kHz | Error (%) | |
|---|---|---|---|---|---|
| Conventional method | Design value | 0 | 37.6 | 309.0 | 1.0 |
| Actual value | −37.6 | 301.4 | |||
| Proposed method | Design value | 0 | 2.1 | 403.9 | 0.7 |
| Actual value | −2.1 | 398.6 | |||
| Harmonic Degree | Prevalent Method | Proposed Method | ||||
|---|---|---|---|---|---|---|
| Design Value (dB) | Actual Value (dB) | Error (dB) | Design Value (dB) | Actual Value (dB) | Error (dB) | |
| Fundamental | 0.0 | 0.2 | 0.2 | 0.0 | 0.1 | 0.1 |
| 17 | −17.3 | −11 | 6.3 | −17.7 | −19.2 | 1.5 |
| 19 | −19.2 | −6.4 | 12.8 | −20.1 | −21.7 | 1.6 |
| 21 | −20.9 | −9.8 | 11.1 | −22.1 | −24 | 1.9 |
| 23 | −22.4 | −22.9 | 0.5 | −23.9 | −25.3 | 1.4 |
| 35 | −29.7 | −34.1 | 4.4 | −31.7 | −32.8 | 1.1 |
| 37 | −30.7 | −32.3 | 1.6 | −32.7 | −34.2 | 1.5 |
| 39 | −31.6 | −38.5 | 6.9 | −33.7 | −32.8 | 0.9 |
| 41 | −32.5 | −38.8 | 6.3 | −34.6 | −36.4 | 1.8 |
| 43 | −33.3 | −36.2 | 2.9 | −35.4 | −36.7 | 1.3 |
| 45 | −34.1 | −41.1 | 7.0 | −36.2 | −36.4 | 0.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Choi, J.-H.; Mok, H.-S. Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization. Energies 2019, 12, 4646. https://doi.org/10.3390/en12244646
Choi J-H, Mok H-S. Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization. Energies. 2019; 12(24):4646. https://doi.org/10.3390/en12244646
Chicago/Turabian StyleChoi, Jae-Hyuk, and Hyung-Soo Mok. 2019. "Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization" Energies 12, no. 24: 4646. https://doi.org/10.3390/en12244646
APA StyleChoi, J.-H., & Mok, H.-S. (2019). Simultaneous Design of Low-Pass Filter with Impedance Matching Transformer for SONAR Transducer Using Particle Swarm Optimization. Energies, 12(24), 4646. https://doi.org/10.3390/en12244646