DFT-Based Identification of Oscillation Modes from PMU Data Using an Exponential Window Function

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Conventional Modal Identification in Power Systems
2.1. Models for Modal Identification in Time and Frequency Domains
2.2. Conventional DFT-Based Method
2.3. Prony Method with SVD
3. Modal Identification Methods with Exponential Window Function
3.1. Exponential Window Function for Modal Identification
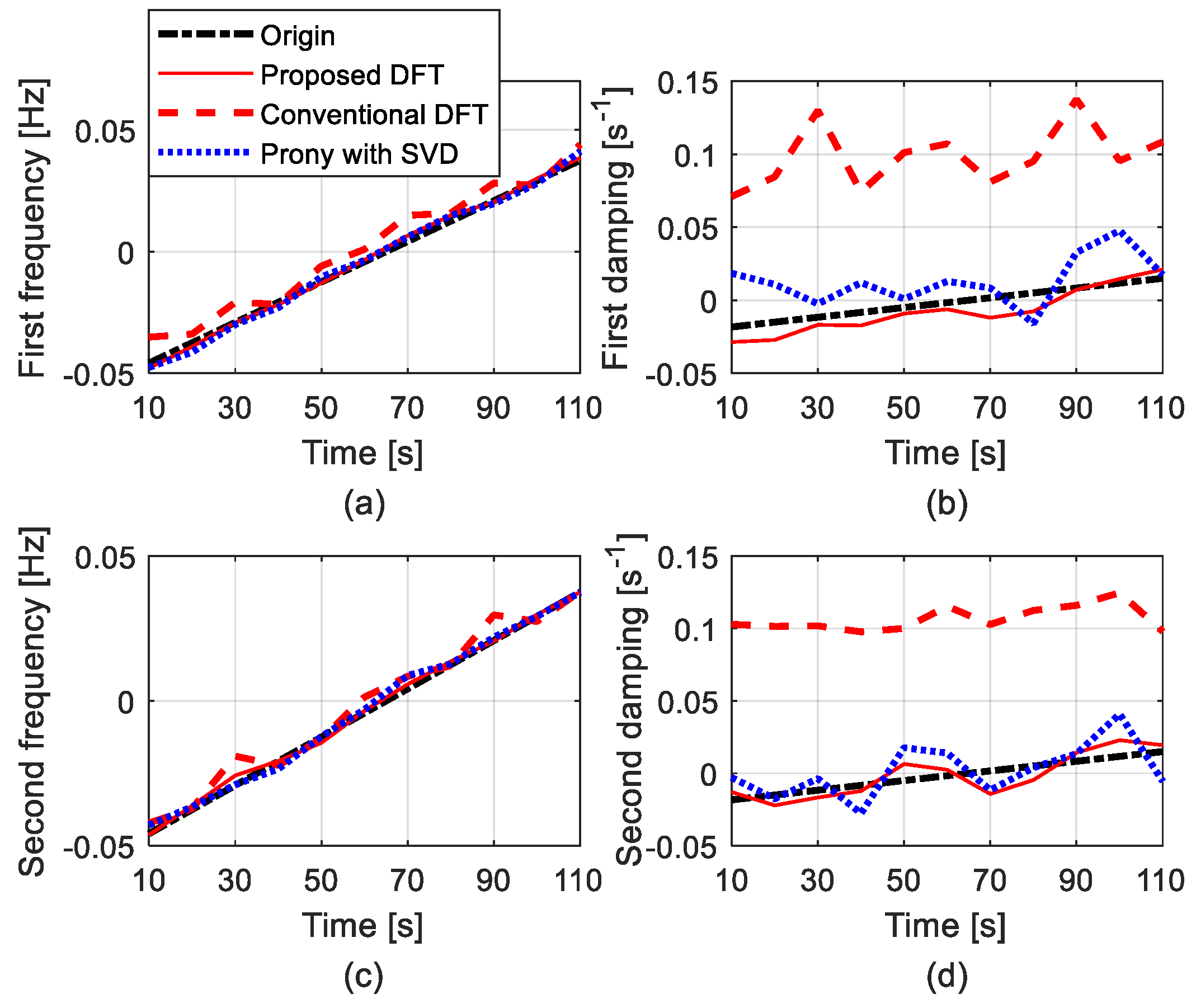
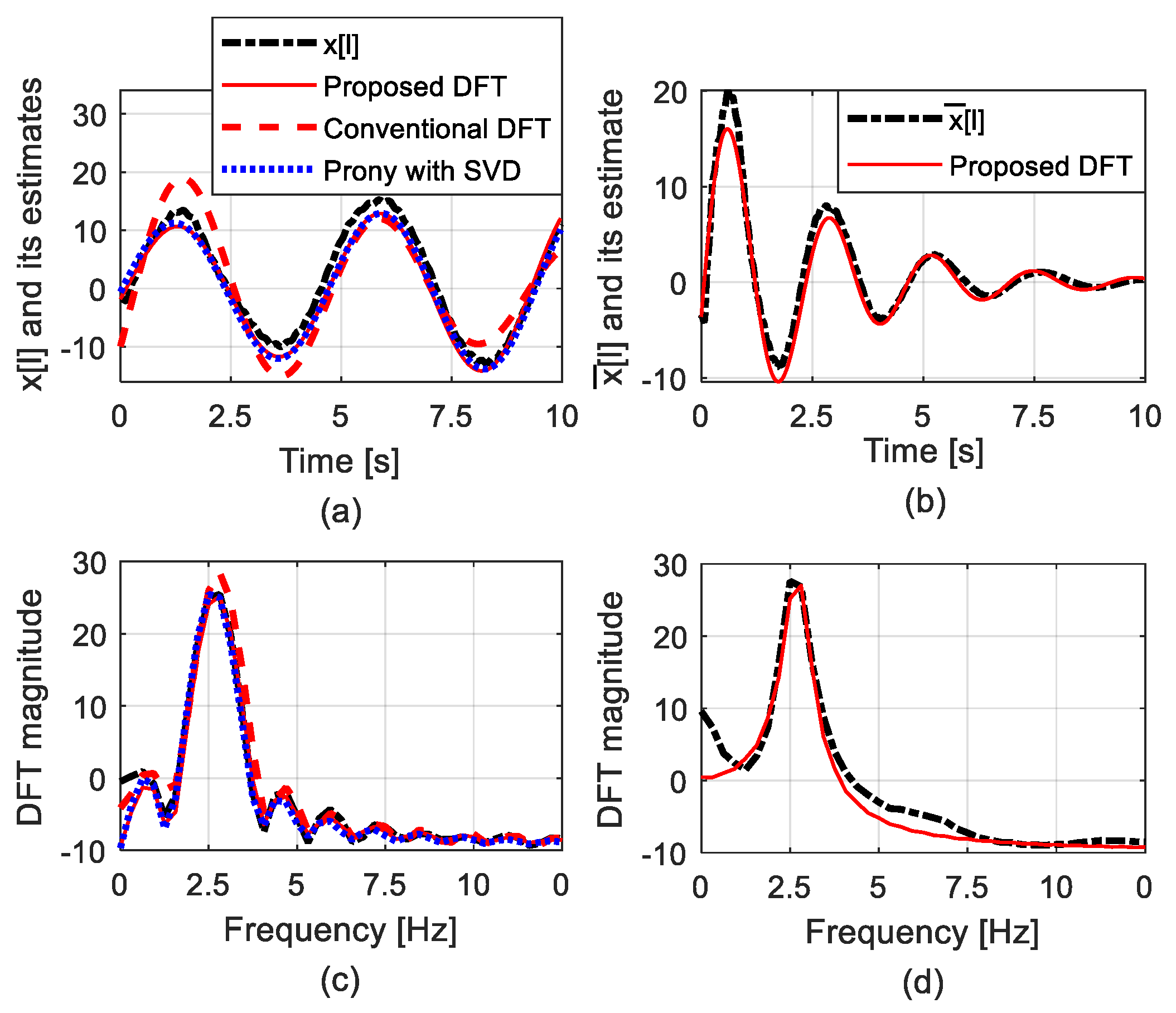
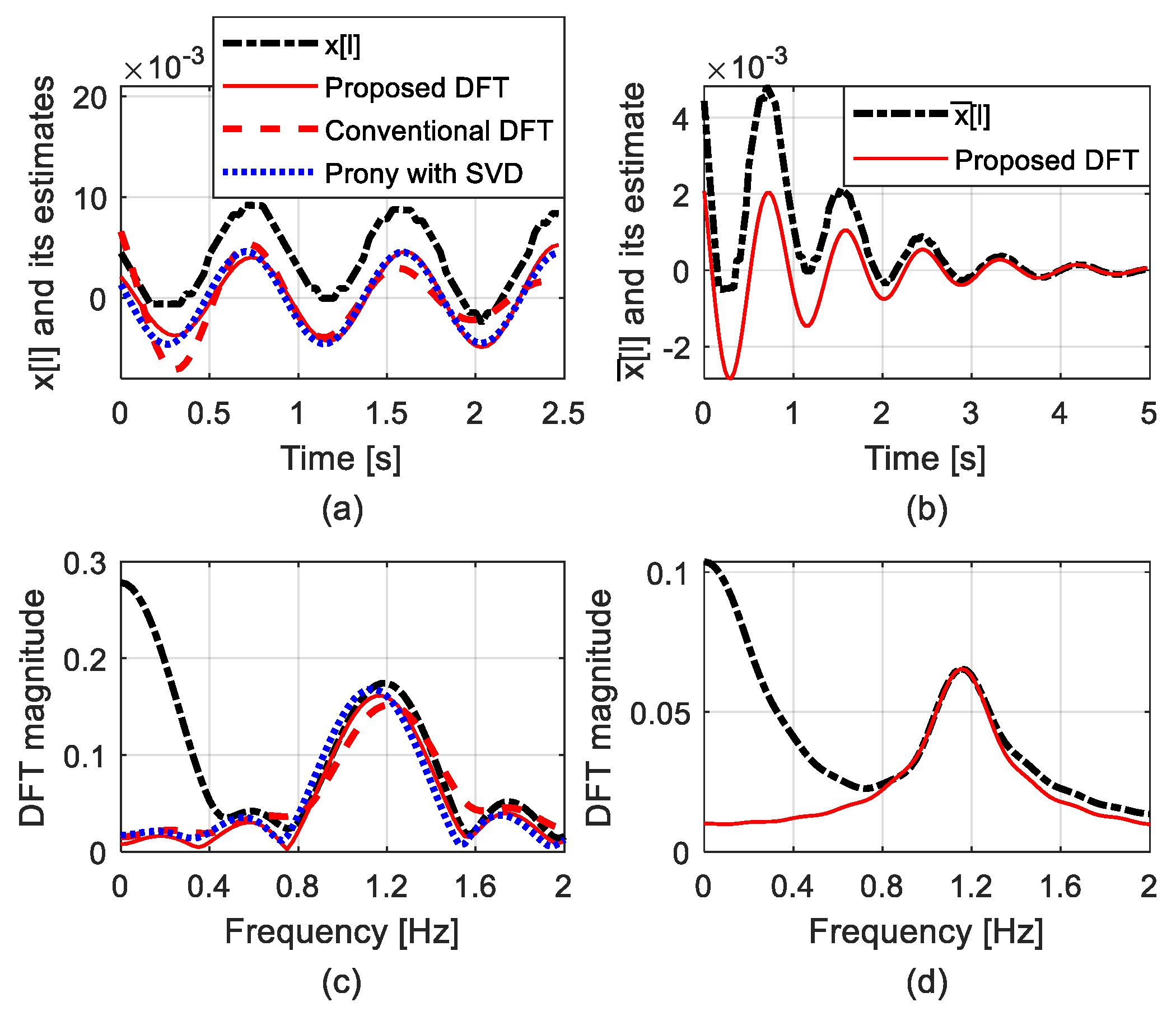
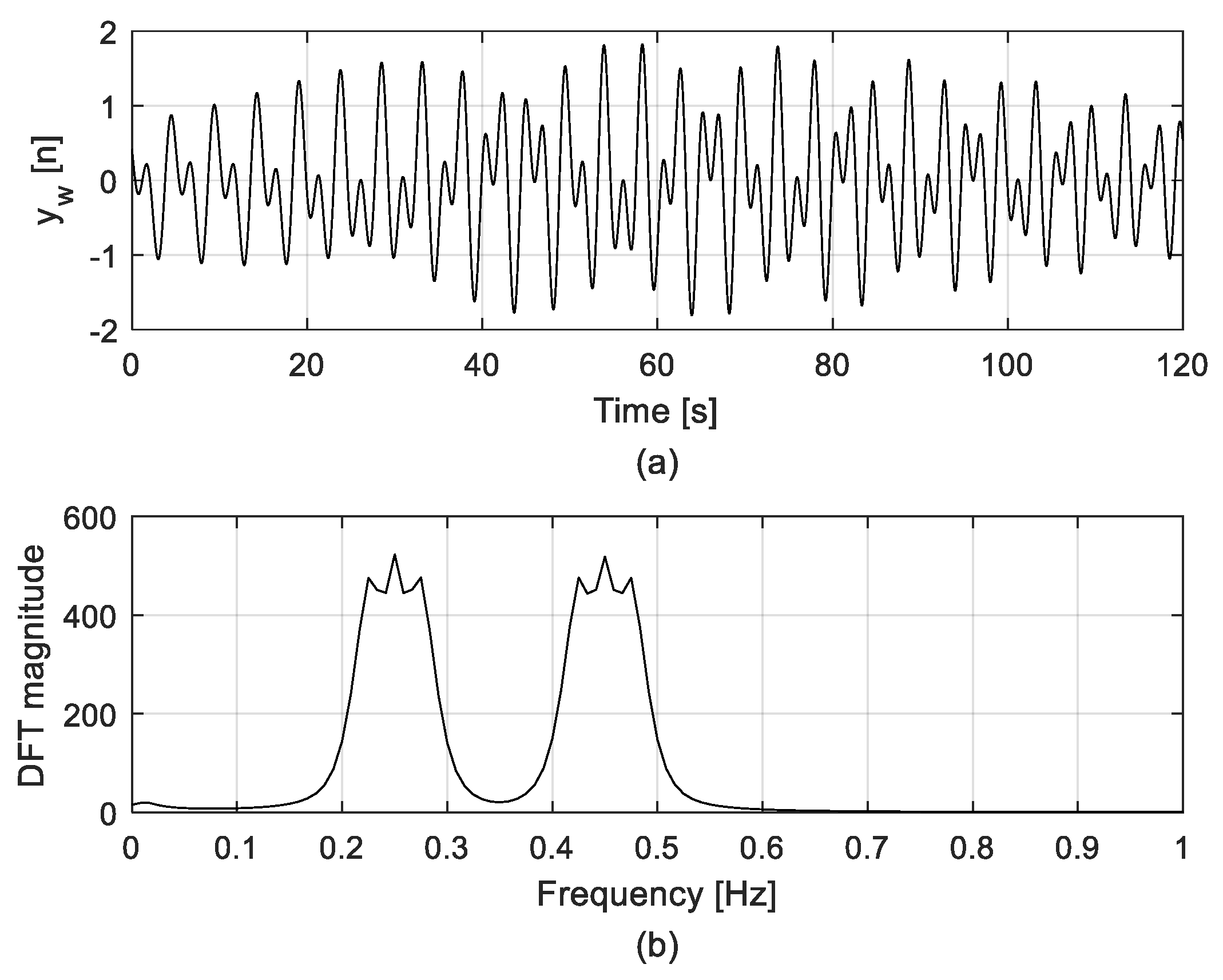
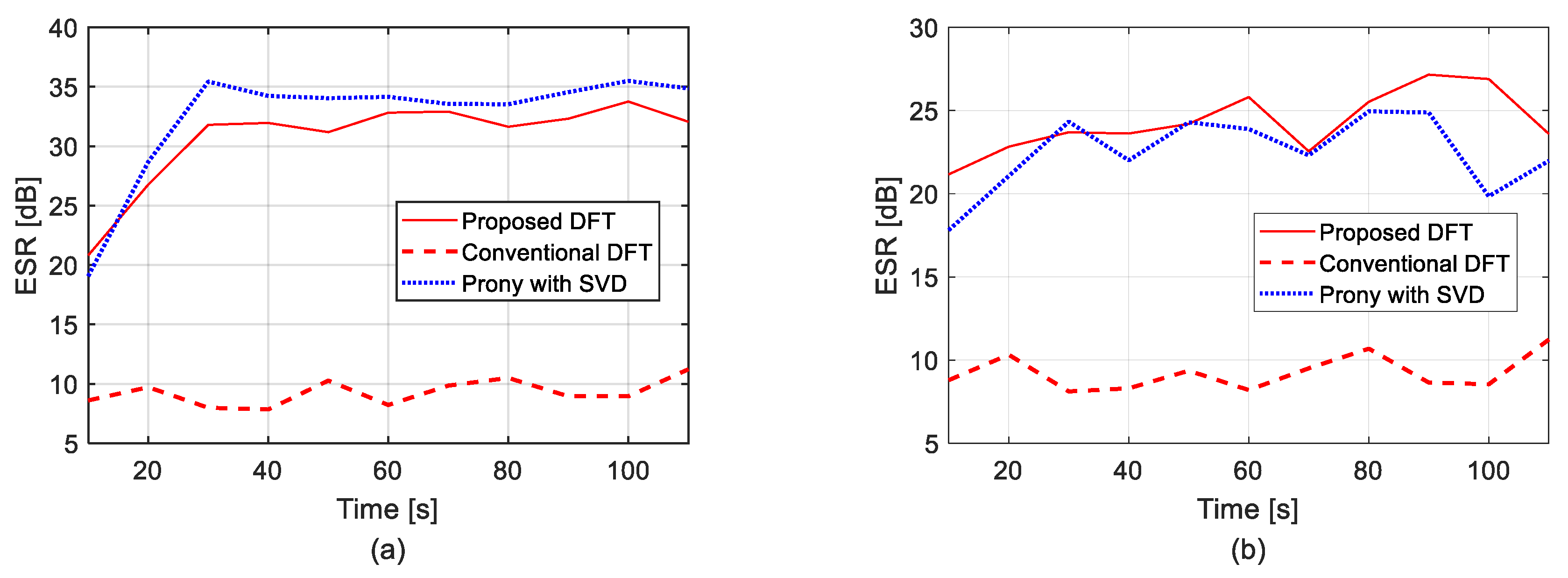
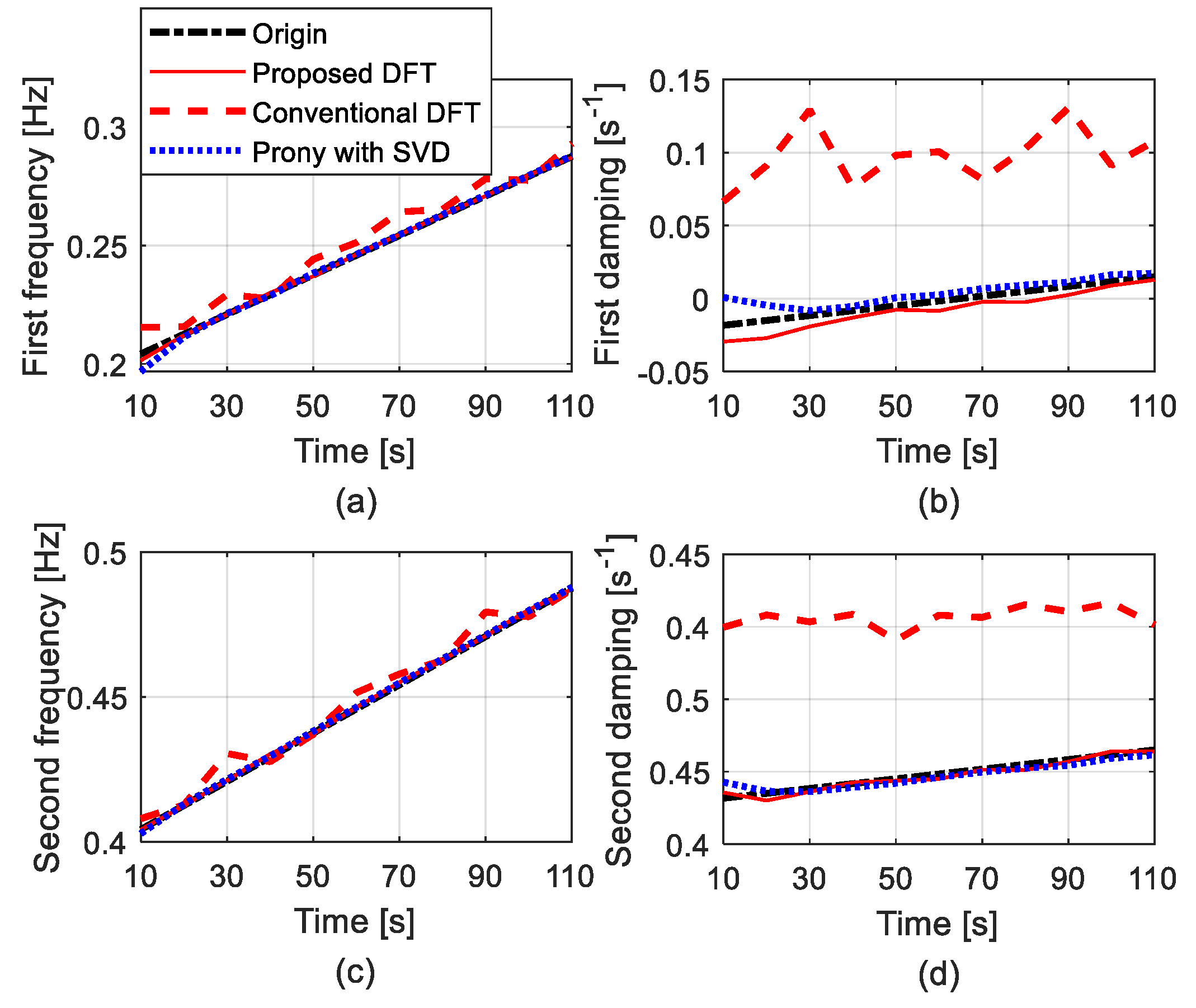
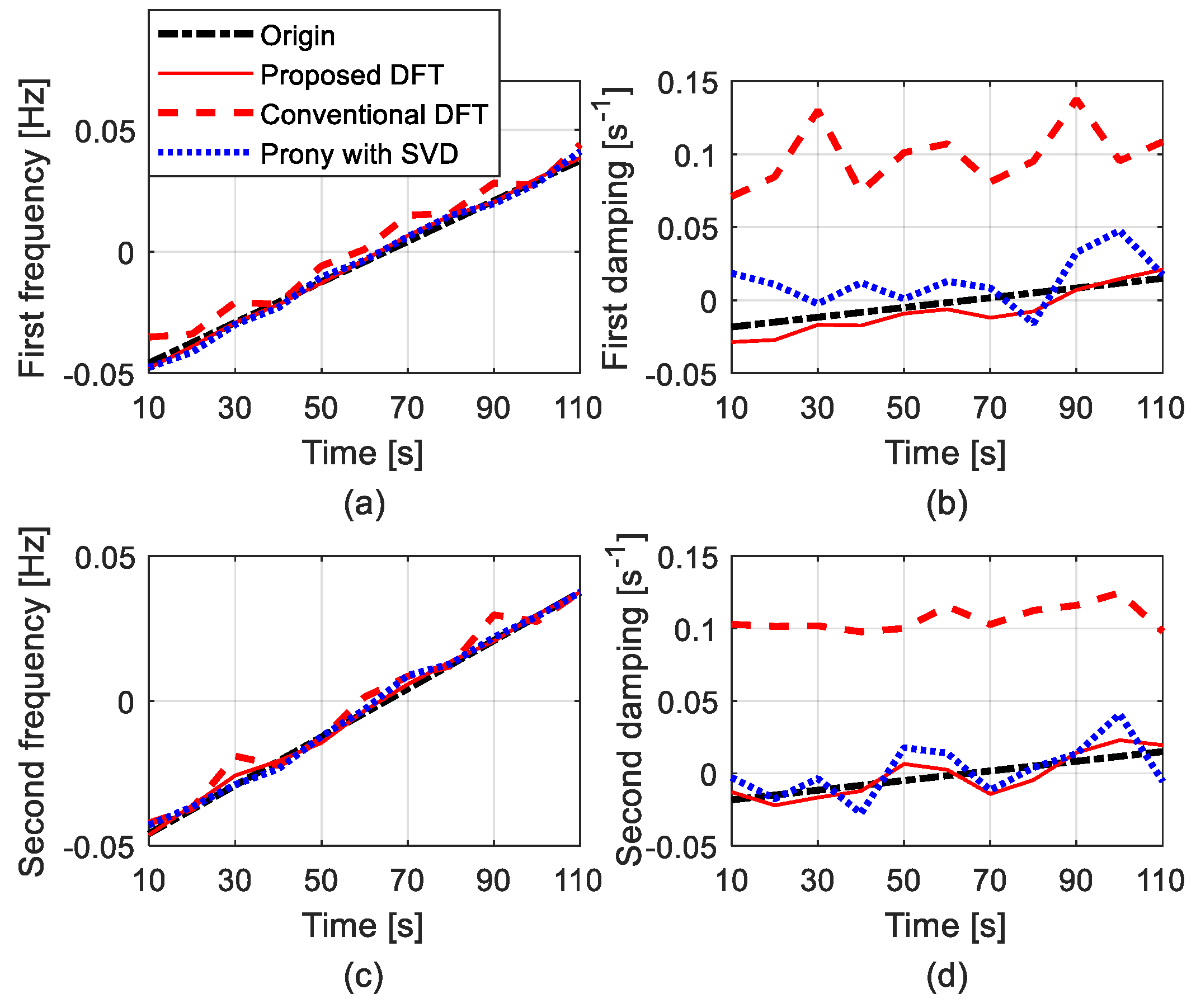
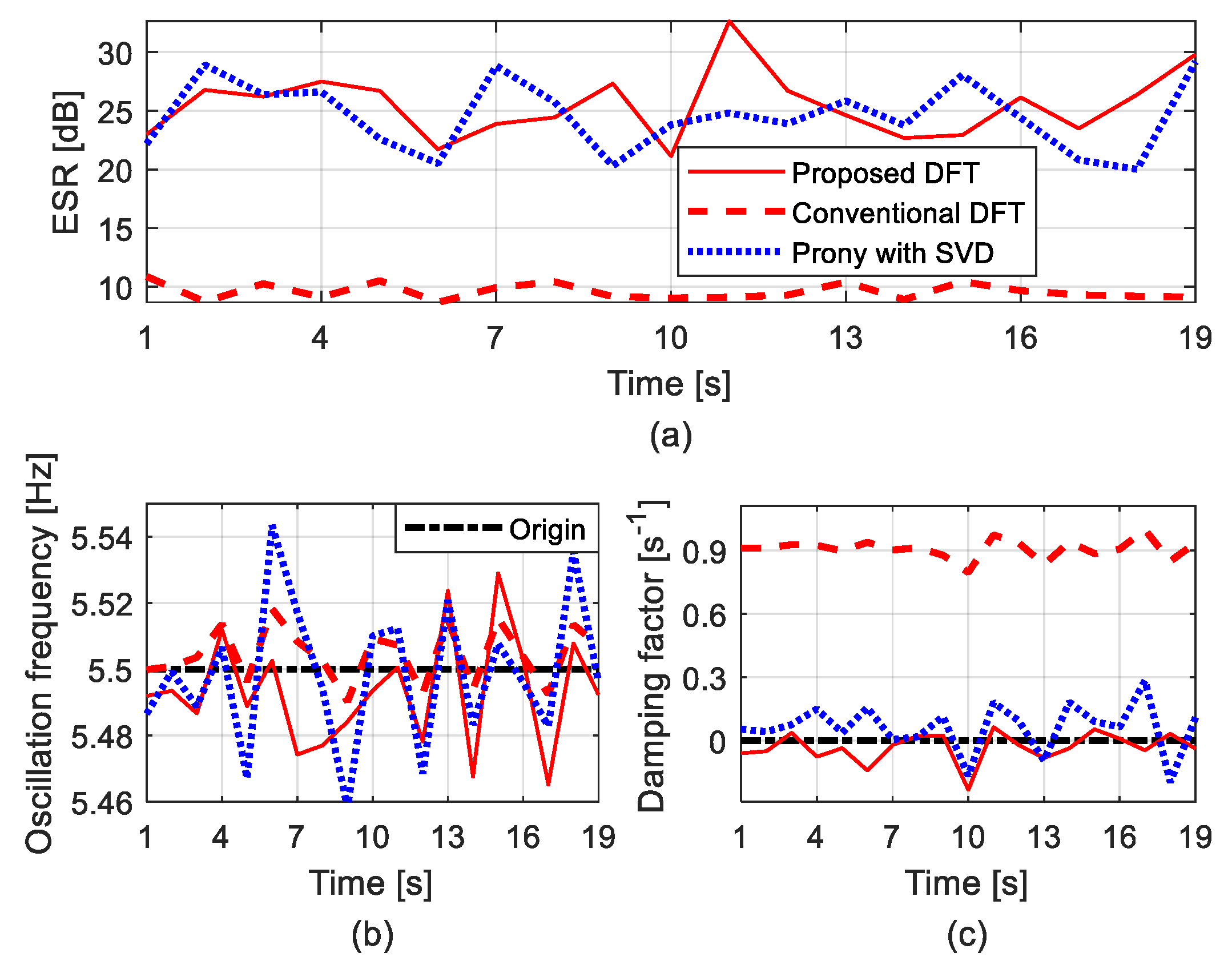
3.2. Simulations through Synthetic Data
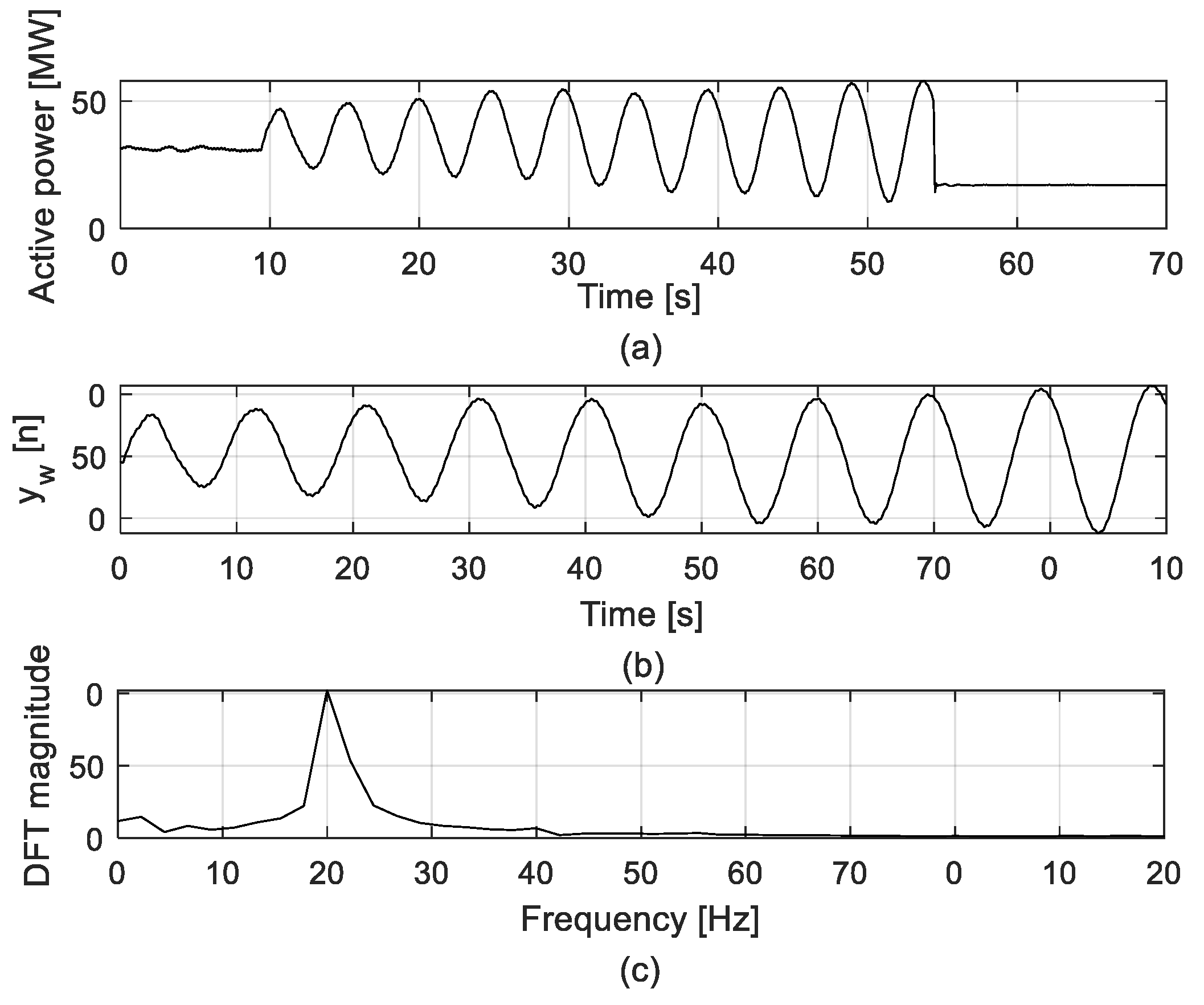
4. Identification of Oscillation modes from PMU Data
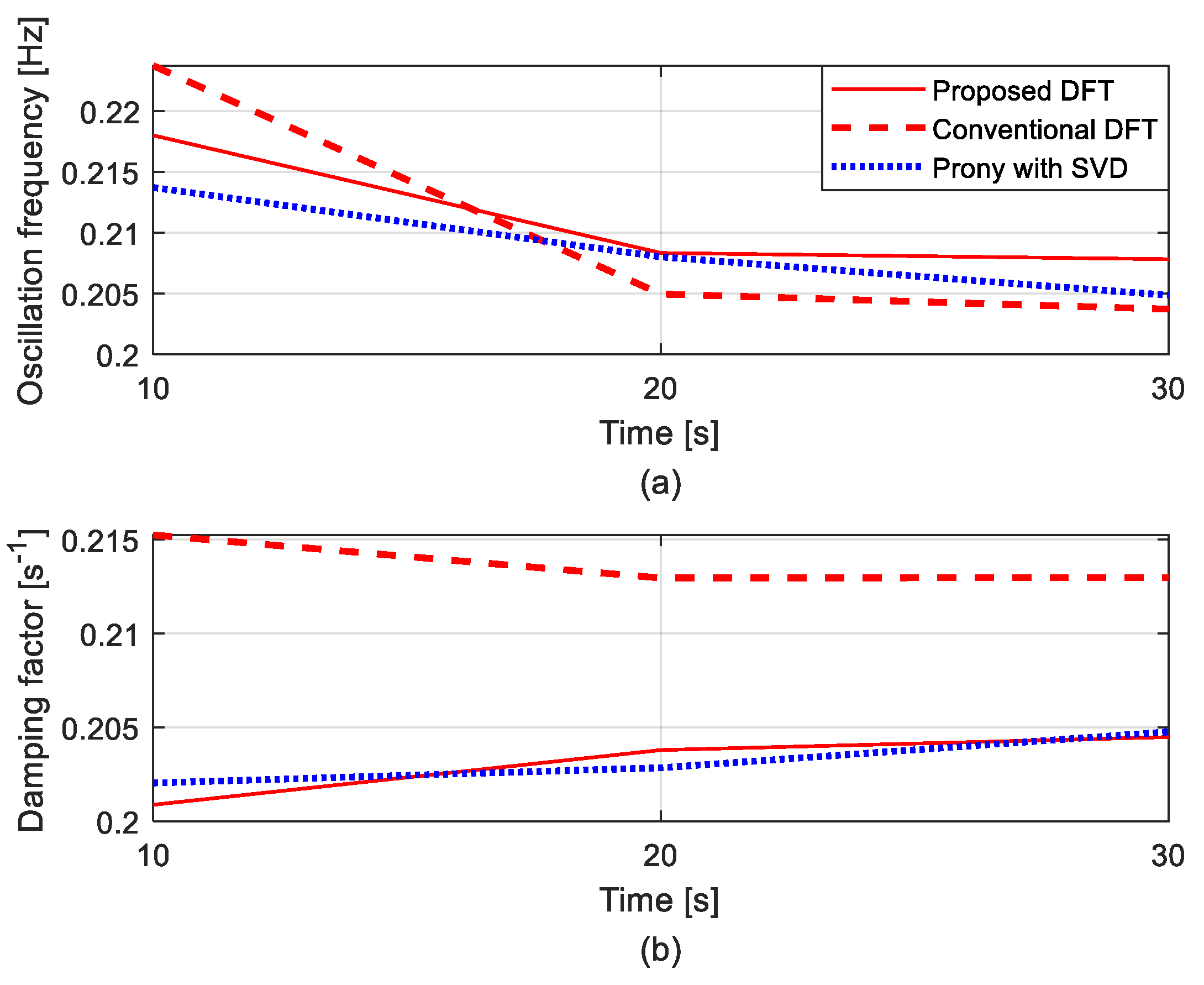
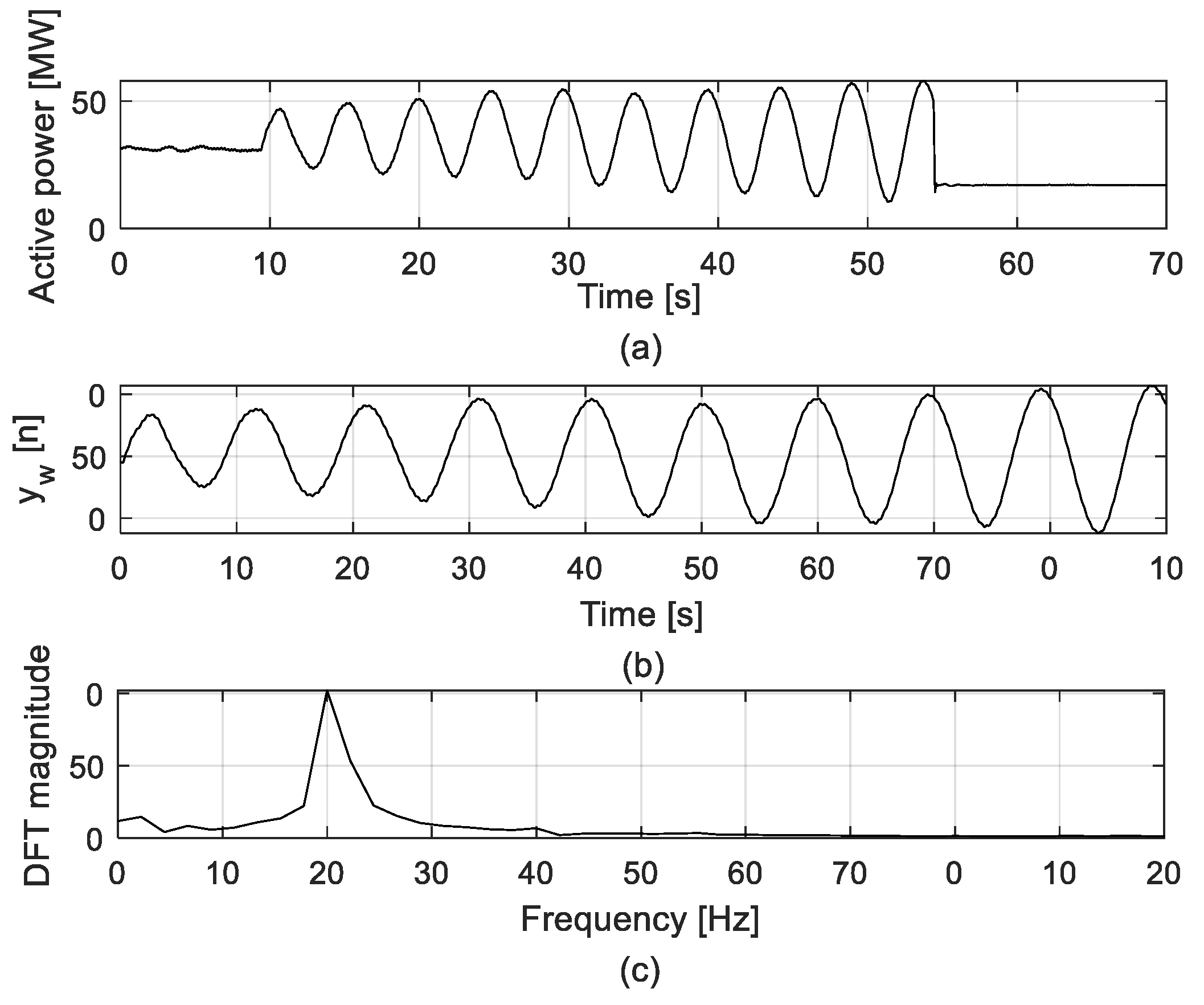
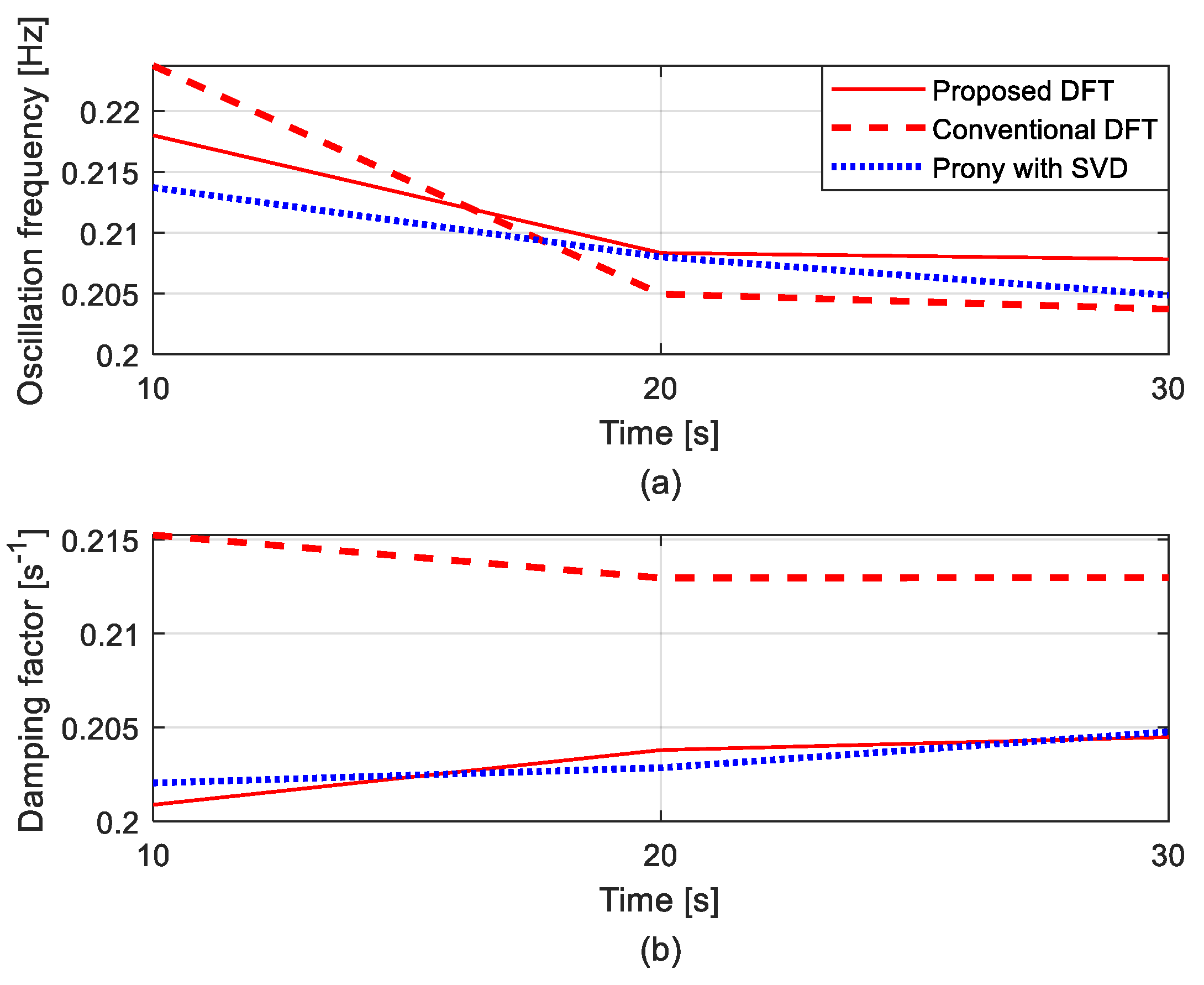
4.1. Interarea Mode of Central American Power System
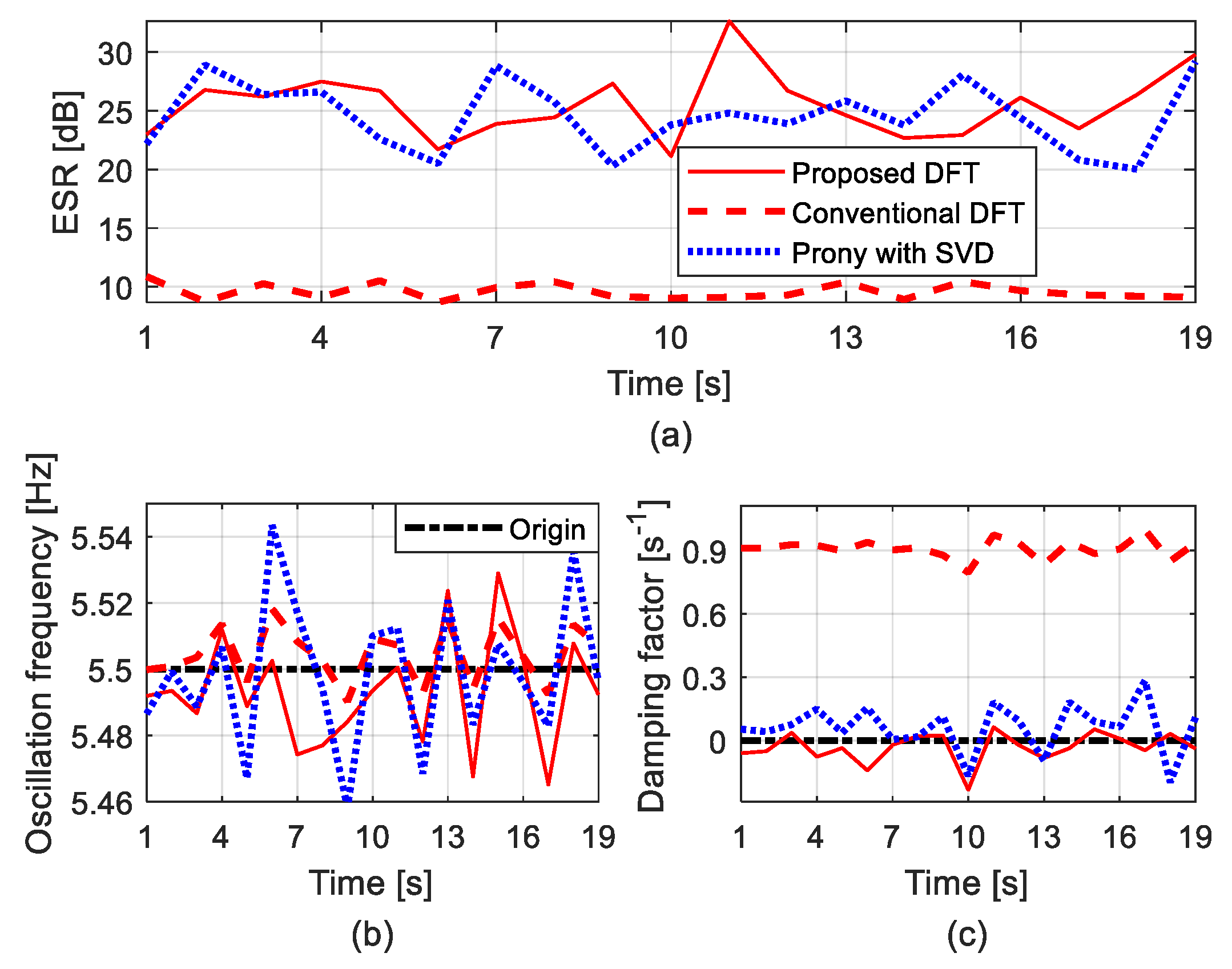
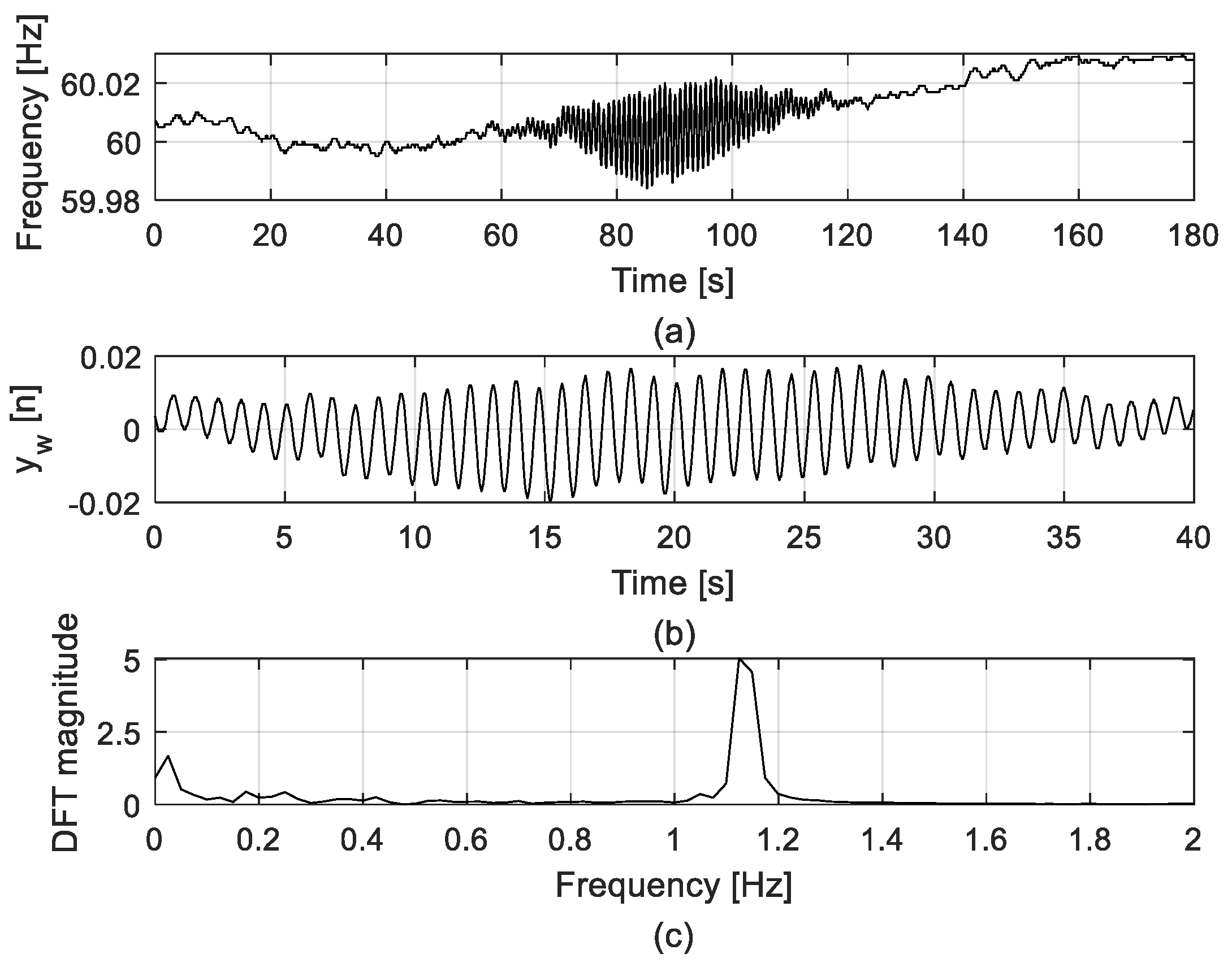
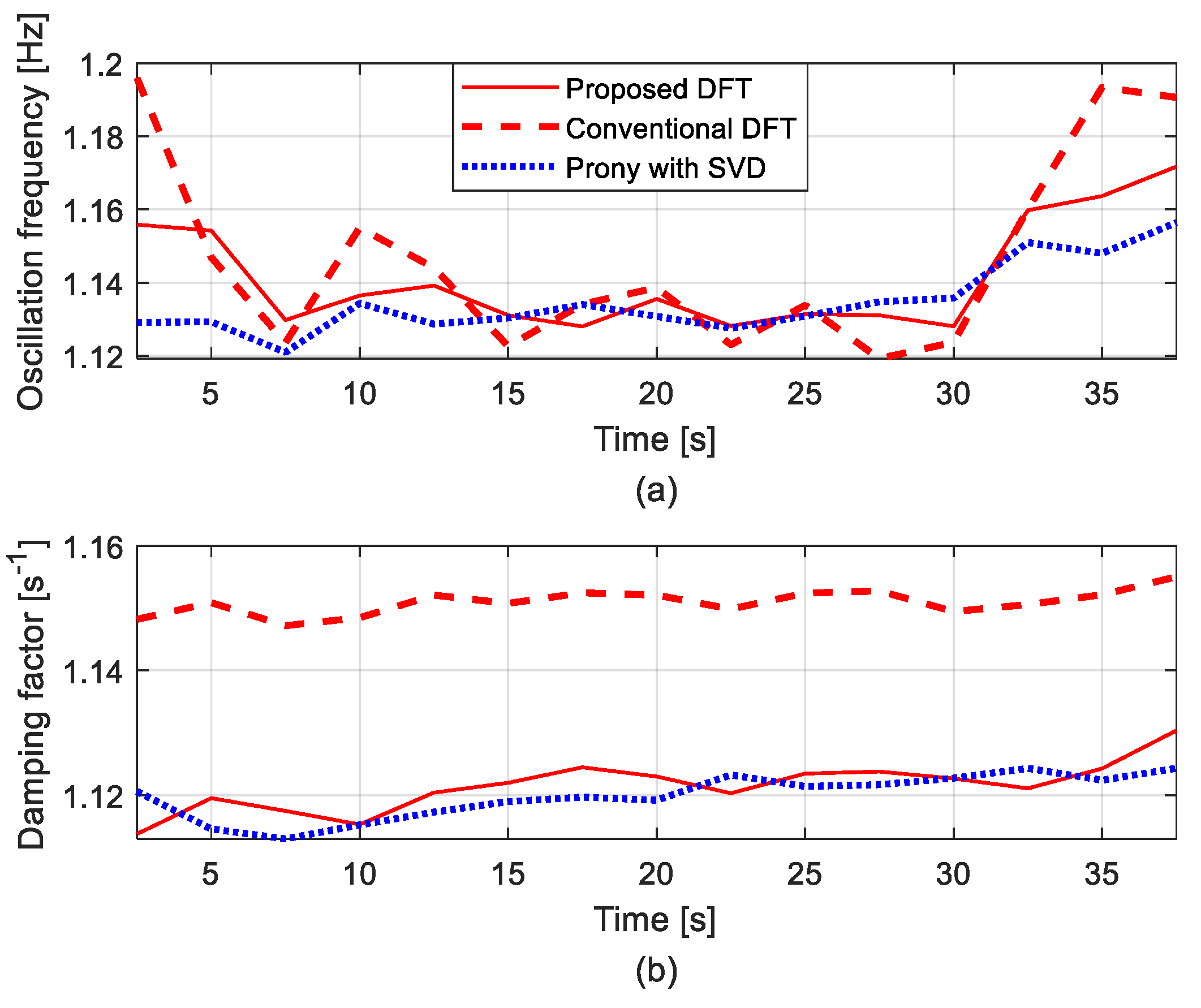
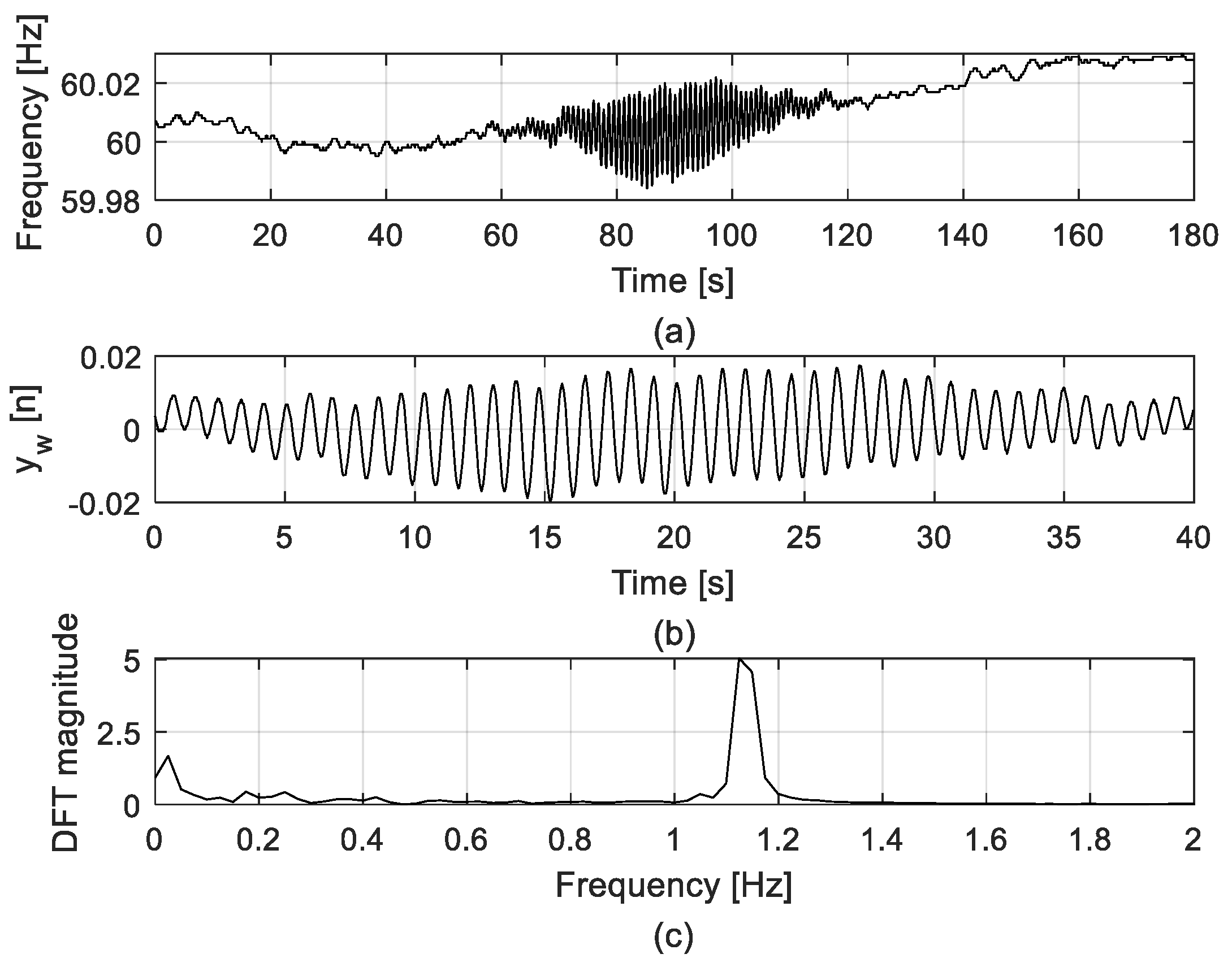
4.2. Regional Mode of New England Power System
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Bahrman, M.; Larsen, E.V.; Piwko, R.W.; Patel, H.S. Experience with HVDC-turbine-generator torsional interaction at Square Butte. IEEE Trans. Power App. Syst. 1980, 99, 966–976. [Google Scholar] [CrossRef]
- Fan, L.; Kavasseri, R.; Miao, Z.L.; Zhu, C. Modeling of DFIG based wind farms for SSR analysis. IEEE Trans. Power Del. 2010, 25, 2073–2082. [Google Scholar] [CrossRef]
- Hauer, J.; Trudnowski, D.; Rogers, G.; Mittelstadt, B.; Litzenberger, W.; Johnson, J. Keeping an eye on power system dynamics. IEEE Comput. Appl. Power 1997, 10, 50–54. [Google Scholar] [CrossRef]
- Espinoza, J.V.; Guzman, A.; Calero, F.; Mynam, M.V.; Palma, E. Wide-Area Protection and Control Scheme Maintains Central America’s Power System Stability. In Proceedings of the Saudi Arabia Smart Grid Conference, Jeddah, Saudi Arabia, 14–17 December 2014; pp. 1–9. [Google Scholar]
- Test Cases Library of Power System Sustained Oscillations. Available online: http://web.eecs.utk.edu/~kaisun/Oscillation/actualcases.html (accessed on 13 August 2019).
- Rauhala, T.; Gole, A.M.; Jarventausta, P. Detection of subsynchronous torsional oscillation frequencies using phasor measurement. IEEE Trans. Power Syst. 2016, 31, 11–19. [Google Scholar] [CrossRef]
- Jamei, M.; Scaglione, A.; Roberts, C.; Stewart, E.; Peisert, S.; McParland, C.; McEachern, A. Anomaly detection using optimally placed μPMU sensors in distribution grids. IEEE Trans. Power Syst. 2018, 33, 3611–3623. [Google Scholar] [CrossRef]
- Karim, M.A.; Currie, J.; Lie, T.-T. Dynamic event detection using a distributed feature selection based machine learning approach in a self healing microgrid. IEEE Trans. Power Syst. 2018, 33, 4706–4718. [Google Scholar] [CrossRef]
- Hwang, J.K.; Liu, Y. Identification of interarea modes from an effectual impulse response of ringdown frequency data. Electric Power Systems Research 2017, 144, 96–106. [Google Scholar] [CrossRef]
- Crow, M.L.; Singh, A. The matrix pencil for power system modal extraction. IEEE Trans. Power Syst. 2005, 20, 501–502. [Google Scholar] [CrossRef]
- Rios, M.A.; Ordonez, C.A. Online electromechanical modes identification using PMU data. In Proceedings of the IEEE Grenoble PowerTech, Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- Hwang, J.K.; Liu, Y. Identification of interarea modes from ringdown data by curve-fiting in the frequency domain. IEEE Trans. Power Syst. 2017, 32, 842–851. [Google Scholar]
- Hwang, J.K. Parametric DFT identification of interarea modes in consideration of a decaying DC. In Proceedings of the IEEE PES General Meeting, Boston, MA, USA, 17–21 July 2016; pp. 1–5. [Google Scholar]
- Hauer, J.F.; DeSteese, J.G. A Tutorial on Detection and Characterization of Special Behavior in Large Electric Power Systems; Pacific Northwest National Laborartory: Cambridge, MA, USA, 2004; PNNL-14655. [Google Scholar]
- Pierre, J.W.; Trudnowski, D.J.; Donnelly, M.K. Initial results in electromechanical mode identification from ambient data. IEEE Trans. Power Syst. 1997, 12, 1245–1251. [Google Scholar] [CrossRef]
- Oppenheim, A.V.; Schafer, R.W. Digital Signal Processing; Prentice-Hall: Englewood Cliffs, NJ, USA, 1975. [Google Scholar]
- Larsson, M.; Laila, D.S. Monitoring of inter-area oscillations under ambient conditions using subspace identification. In Proceedings of the IEEE PES General Meeting, Calgary, AB, Canada, 26–30 July 2009; pp. 1–6. [Google Scholar]
- Anderson, P.M.; Mirheydar, M. A low-order system frequency response model. IEEE Trans. Power Syst. 1990, 5, 720–729. [Google Scholar] [CrossRef]
- Lin, X.; Weng, H.; Zou, Q.; Liu, P. The frequency closed-loop control strategy of islanded power systems. IEEE Trans. Power Syst. 2008, 23, 796–803. [Google Scholar]
- Qi, L.; Woodruff, S.; Qian, L.; Cartes, D. Prony analysis for time-varying harmonic. In Time-Varying Waveform Distortions in Power Systems; Ribeiro, P.F., Ed.; Wiley-IEEE Press: Hoboken, NJ, USA, 2009; pp. 317–330. [Google Scholar]
- Xiao, J.; Xie, X.; Han, Y.; Wu, J. Dynamic tracking of low-frequency oscillations with improved Prony method in wide-area measurement system. In Proceedings of the IEEE PES General Meeting, Denver, FL, USA, 6–10 June 2004; pp. 1–6. [Google Scholar]



© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, J.K.; Seo, S.; Castanon, J.S.; Kim, H.-C. DFT-Based Identification of Oscillation Modes from PMU Data Using an Exponential Window Function. Energies 2019, 12, 4357. https://doi.org/10.3390/en12224357
Hwang JK, Seo S, Castanon JS, Kim H-C. DFT-Based Identification of Oscillation Modes from PMU Data Using an Exponential Window Function. Energies. 2019; 12(22):4357. https://doi.org/10.3390/en12224357
Chicago/Turabian StyleHwang, Jin Kwon, Sangsoo Seo, Julian Sotelo Castanon, and Ho-Chan Kim. 2019. "DFT-Based Identification of Oscillation Modes from PMU Data Using an Exponential Window Function" Energies 12, no. 22: 4357. https://doi.org/10.3390/en12224357
APA StyleHwang, J. K., Seo, S., Castanon, J. S., & Kim, H.-C. (2019). DFT-Based Identification of Oscillation Modes from PMU Data Using an Exponential Window Function. Energies, 12(22), 4357. https://doi.org/10.3390/en12224357