Research on Intelligent Predictive AGC of a Thermal Power Unit Based on Control Performance Standards

Abstract
:1. Introduction
2. AGC System Structure and CPS
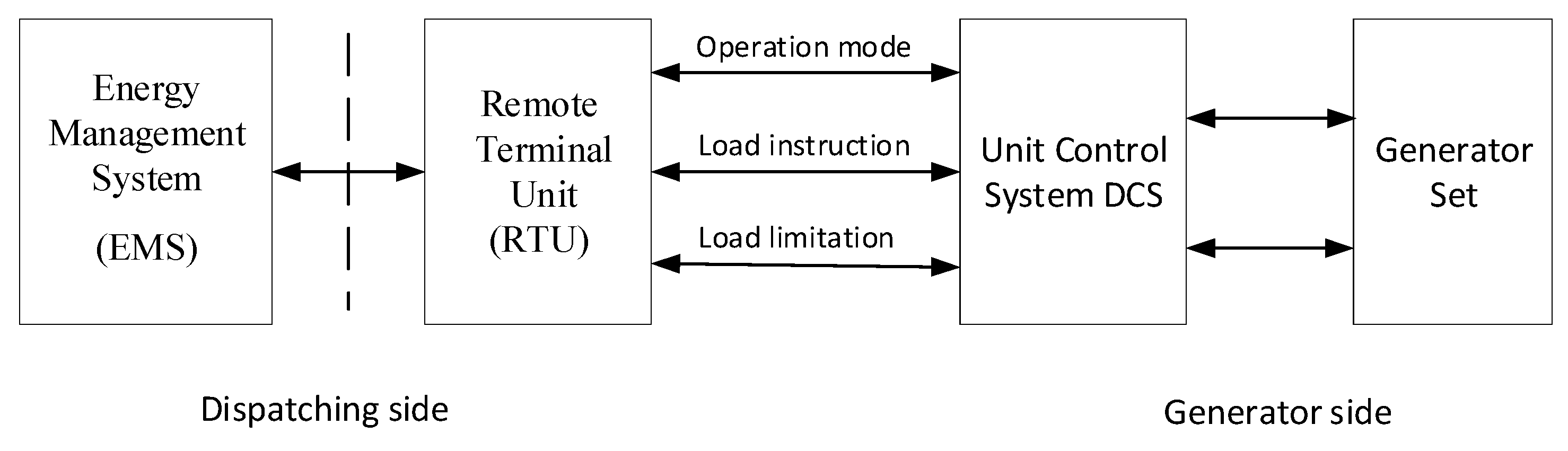
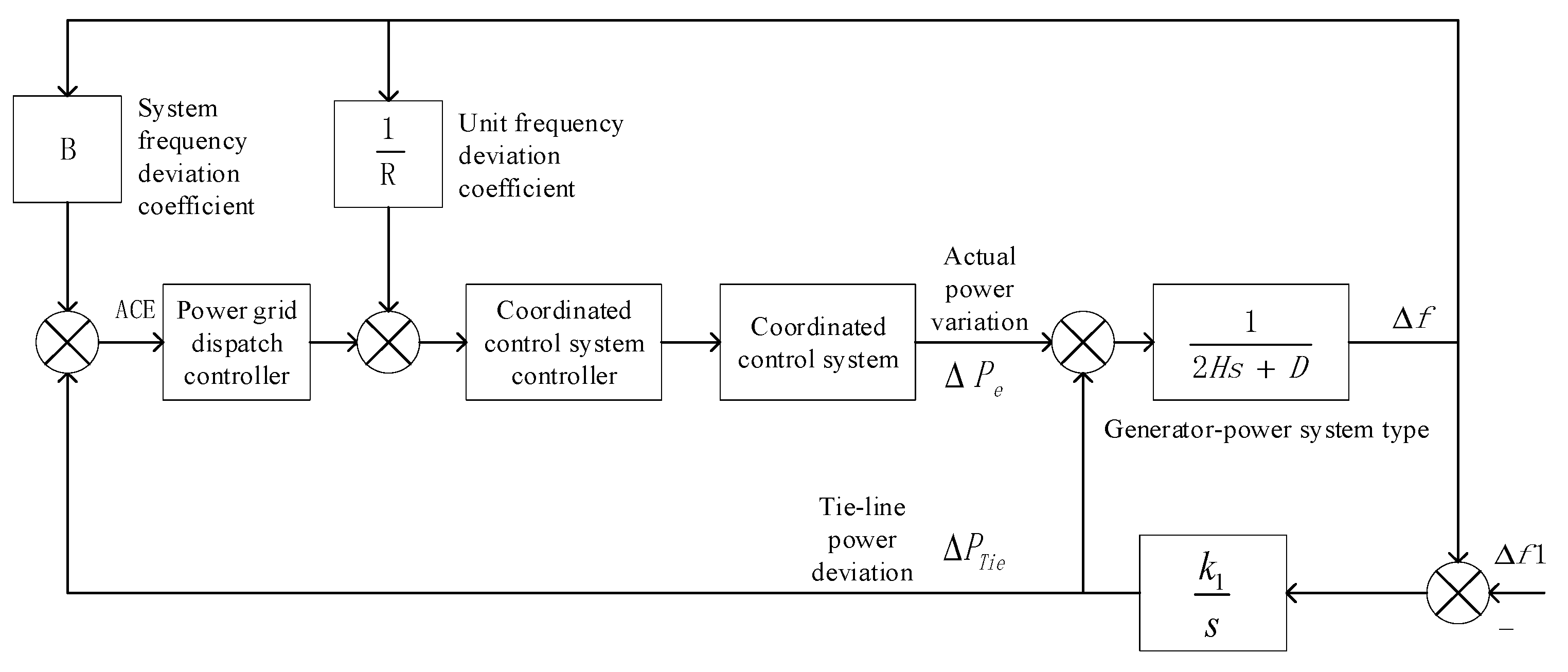
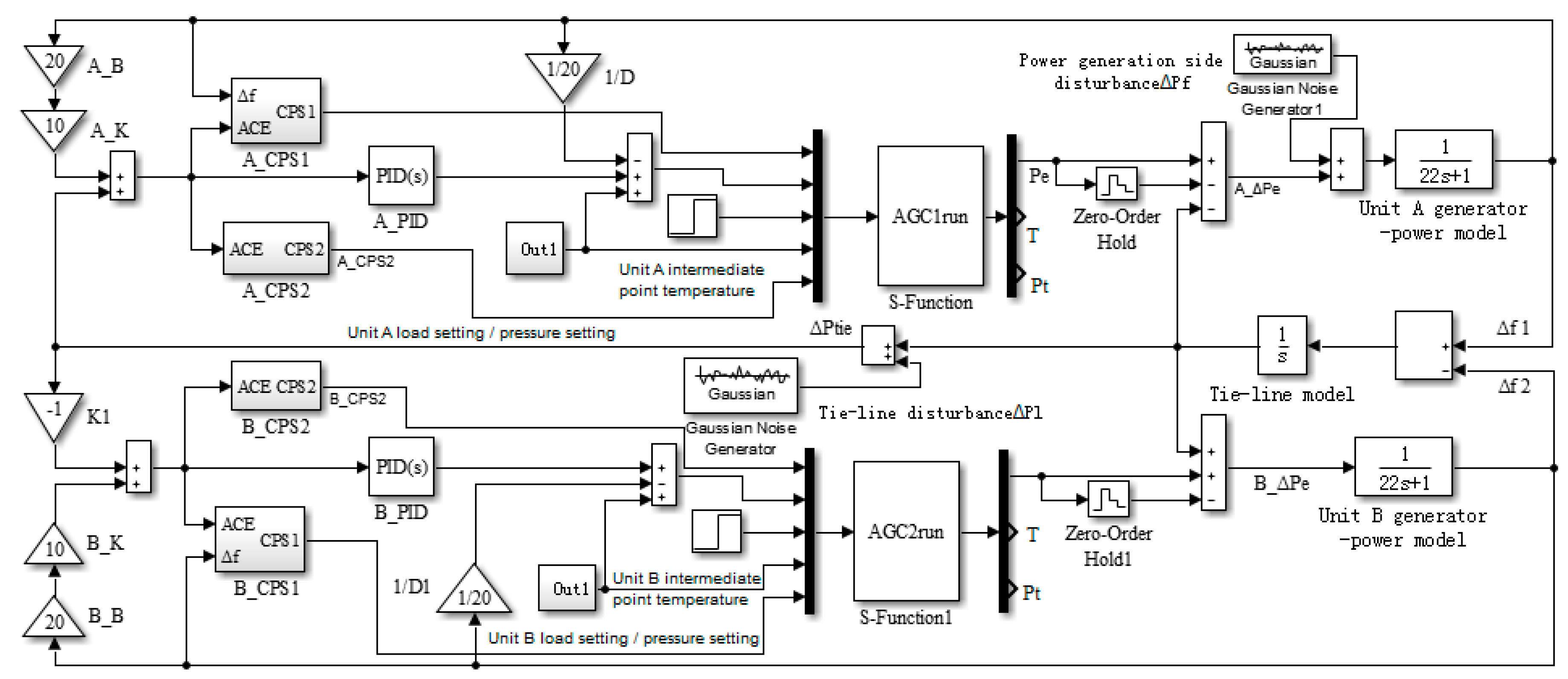
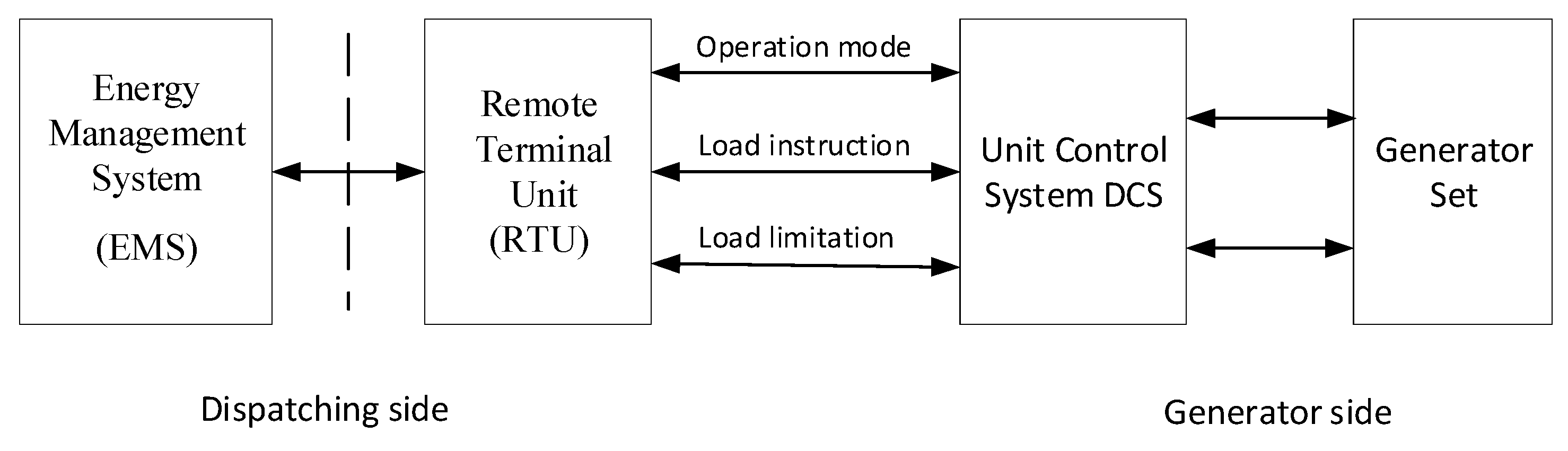
2.1. AGC System Structure
2.2. CPS
3. Design and Identification of an AGC Intelligent Control System Based on CPS
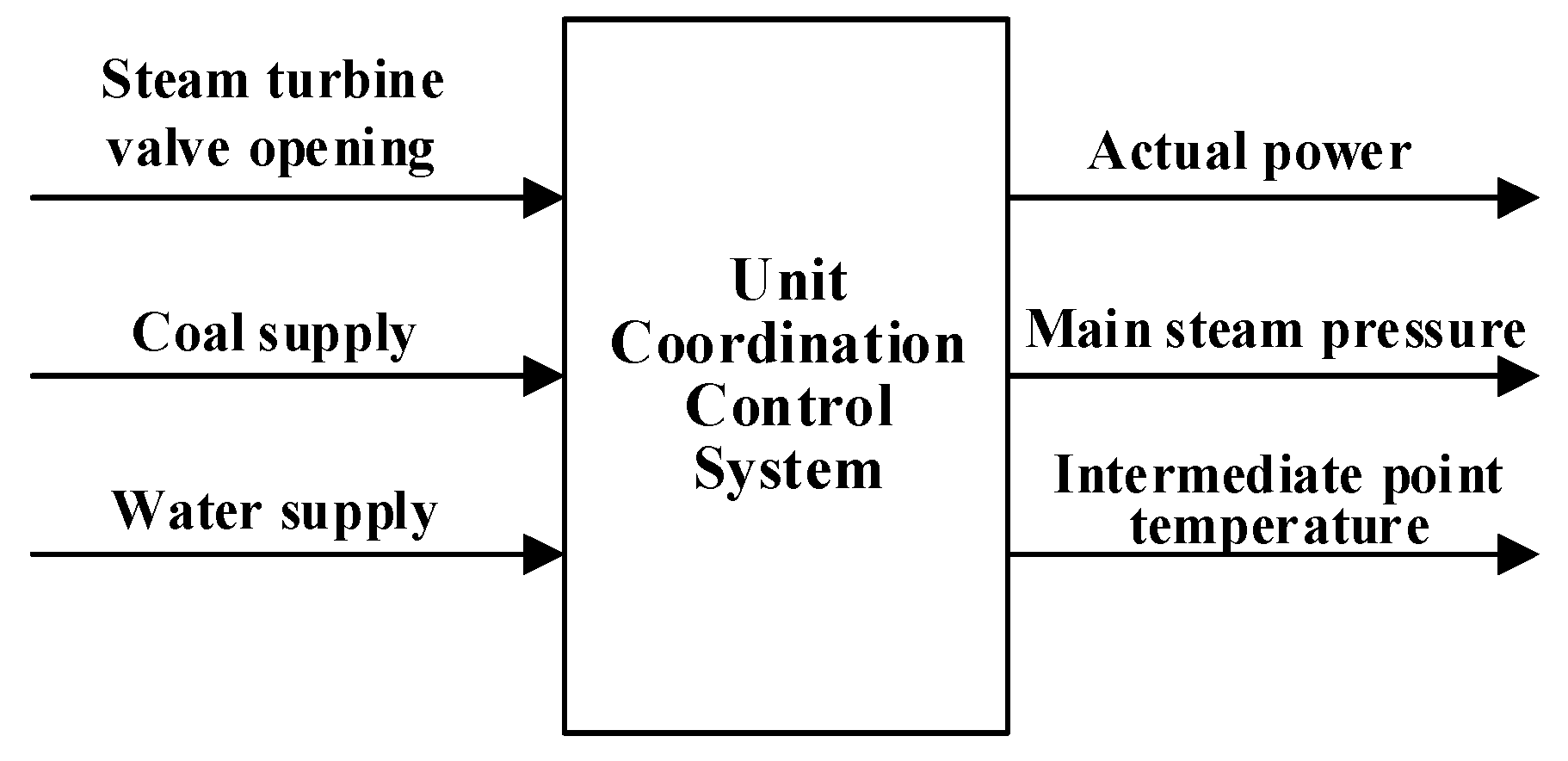
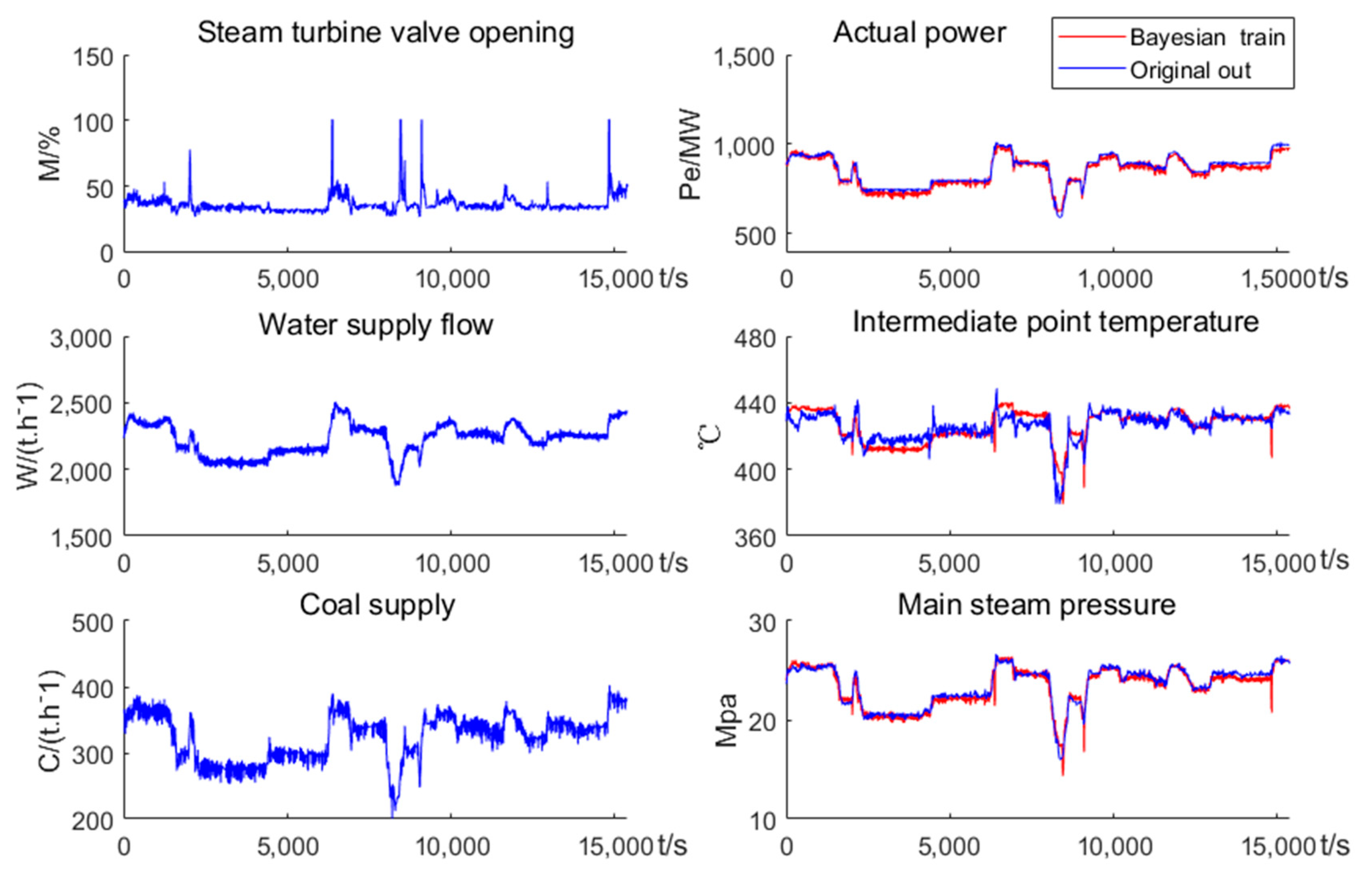
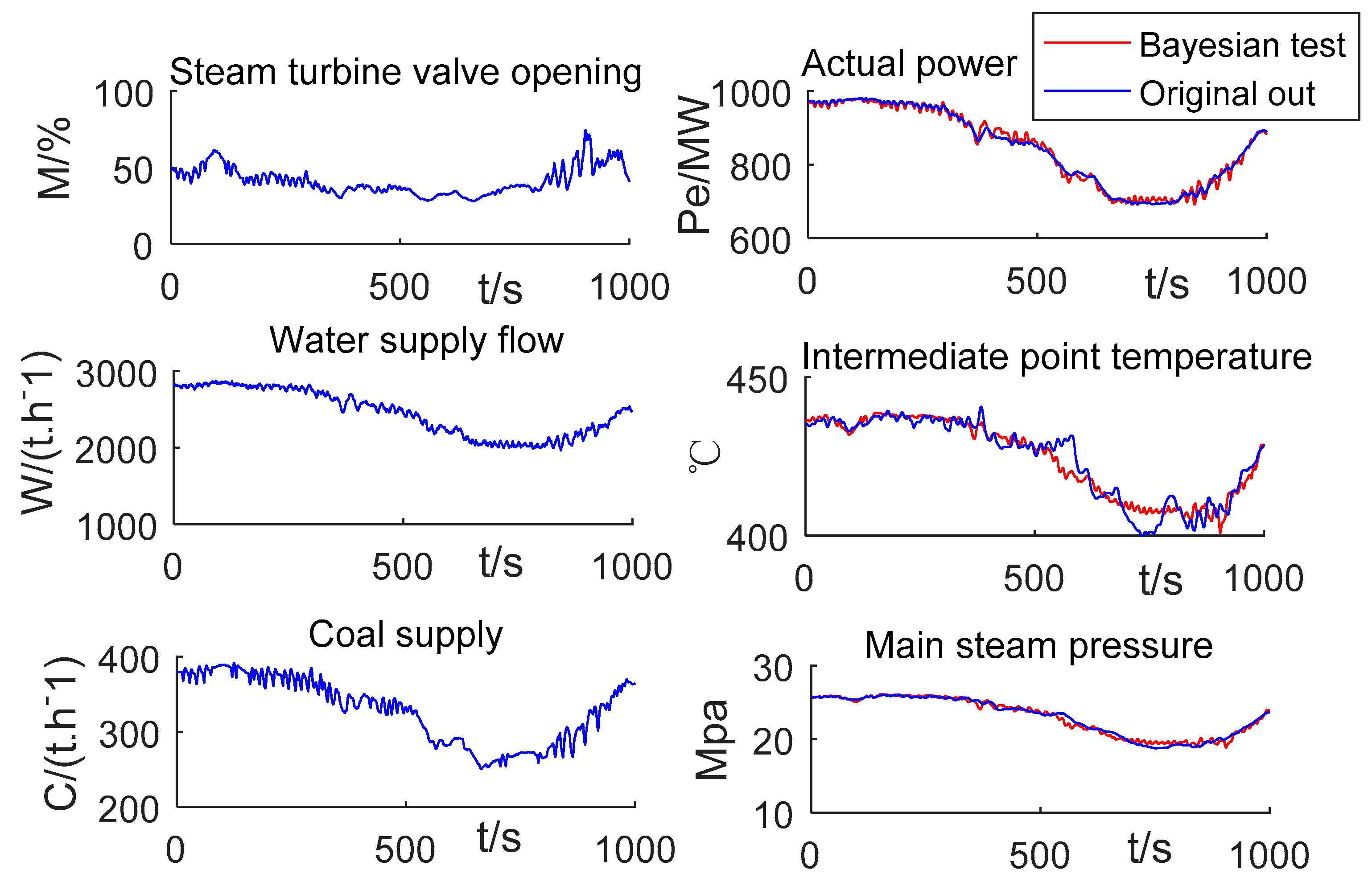
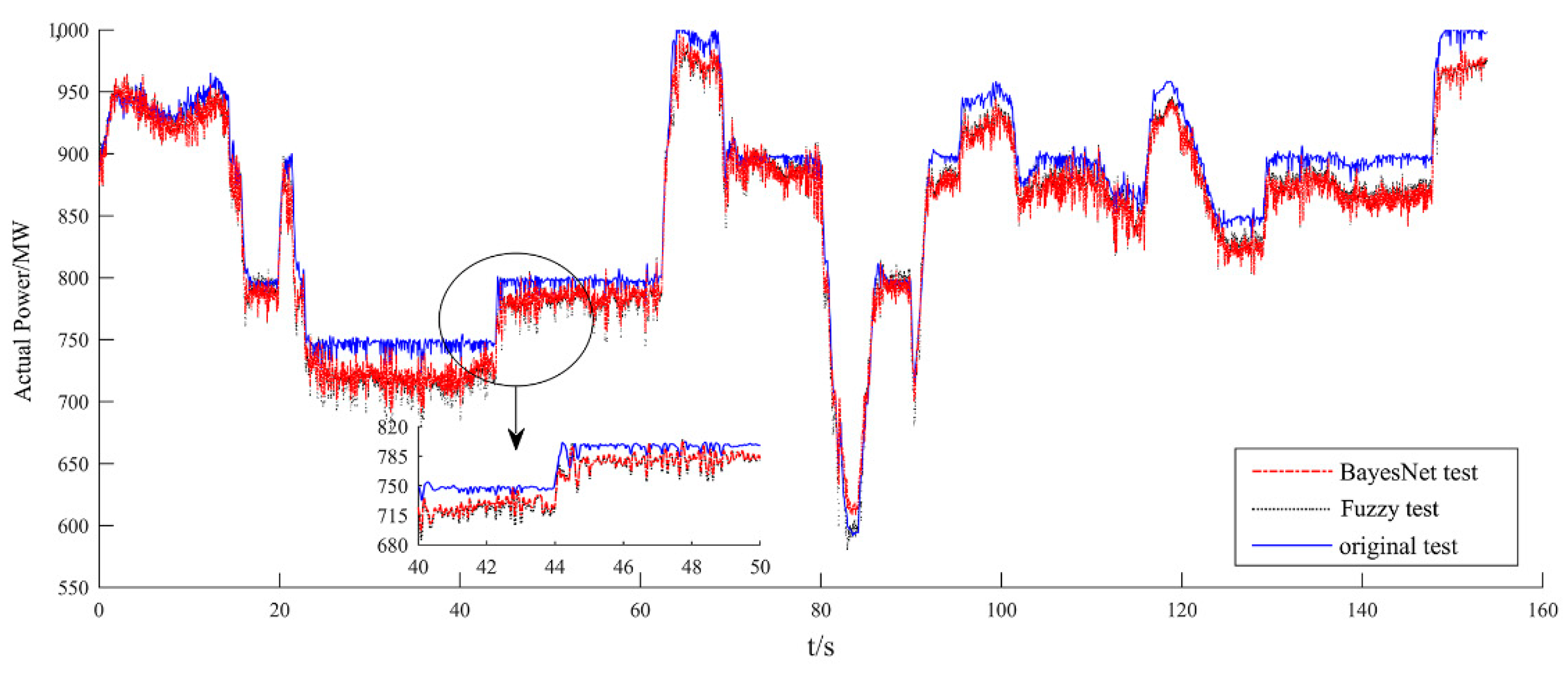
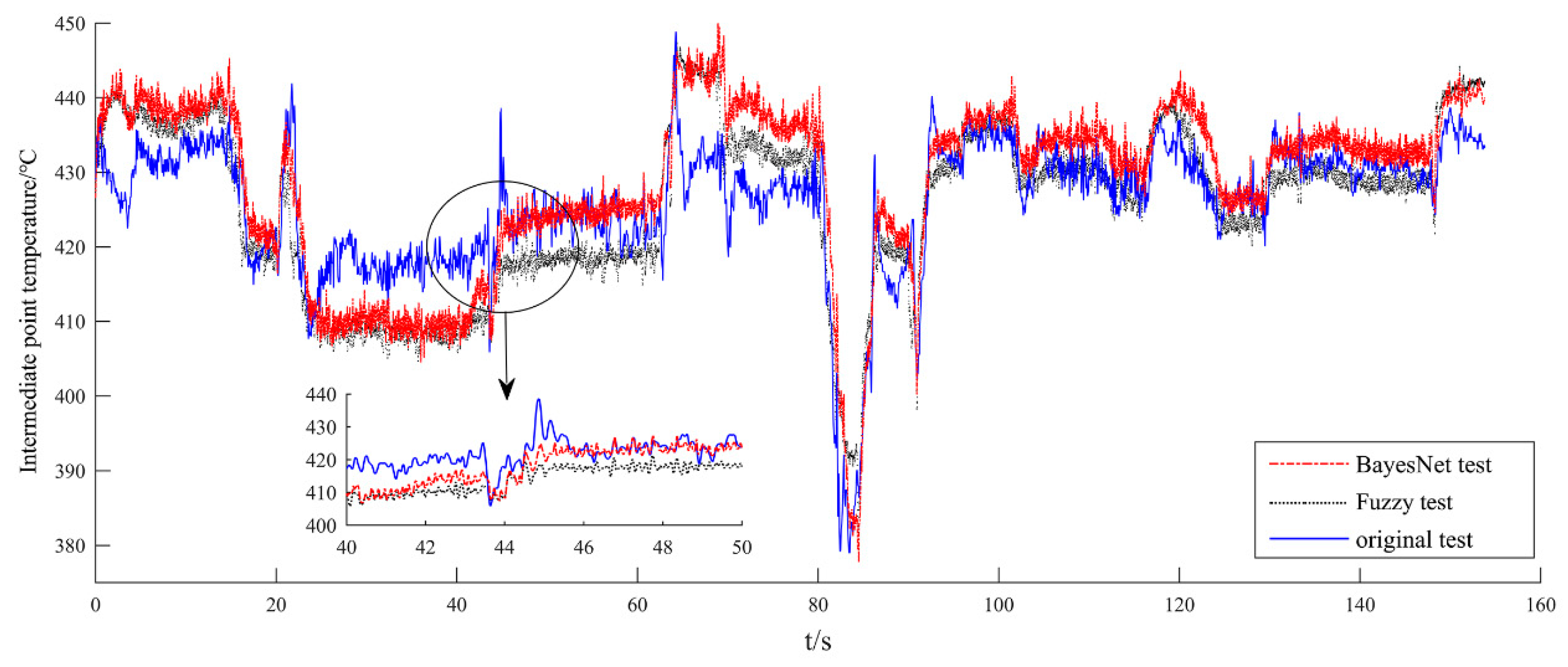
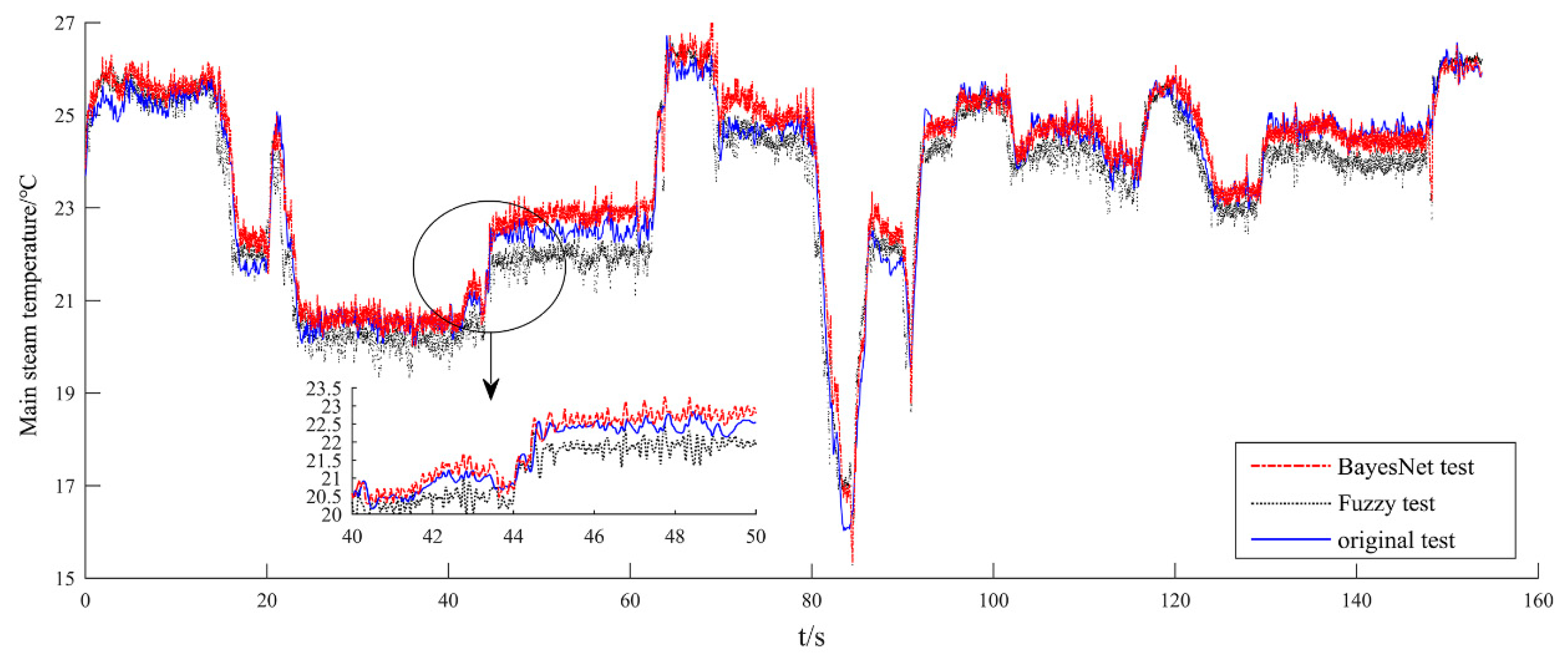
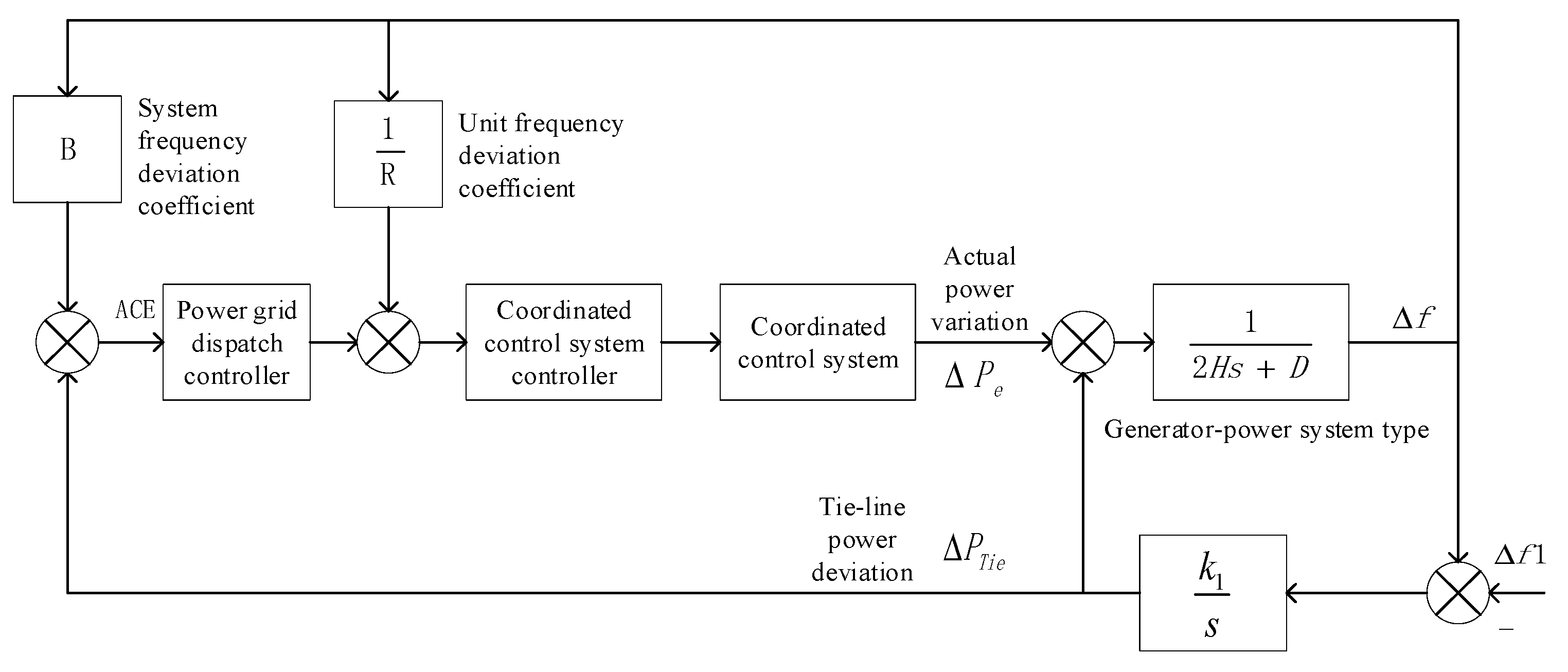
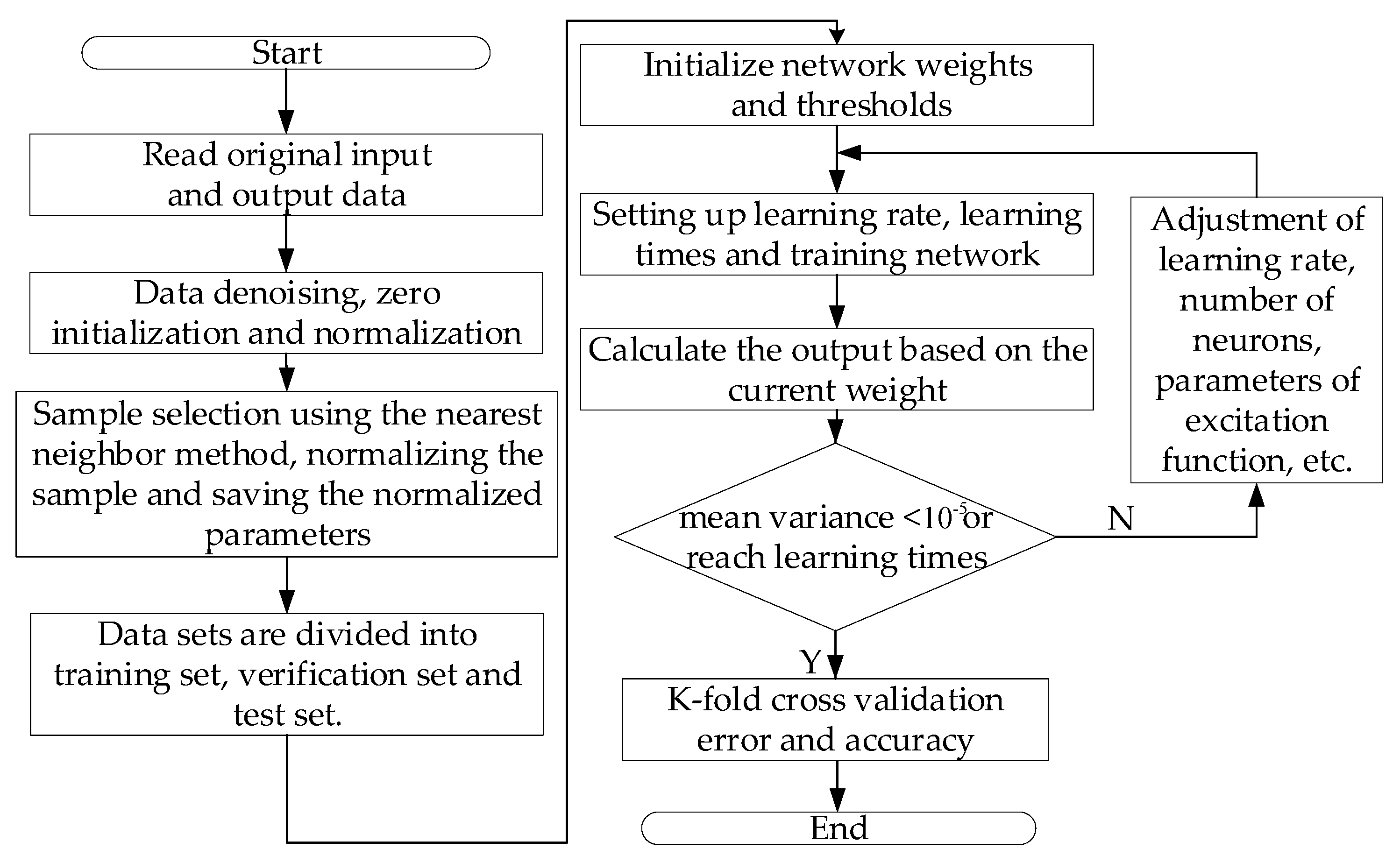
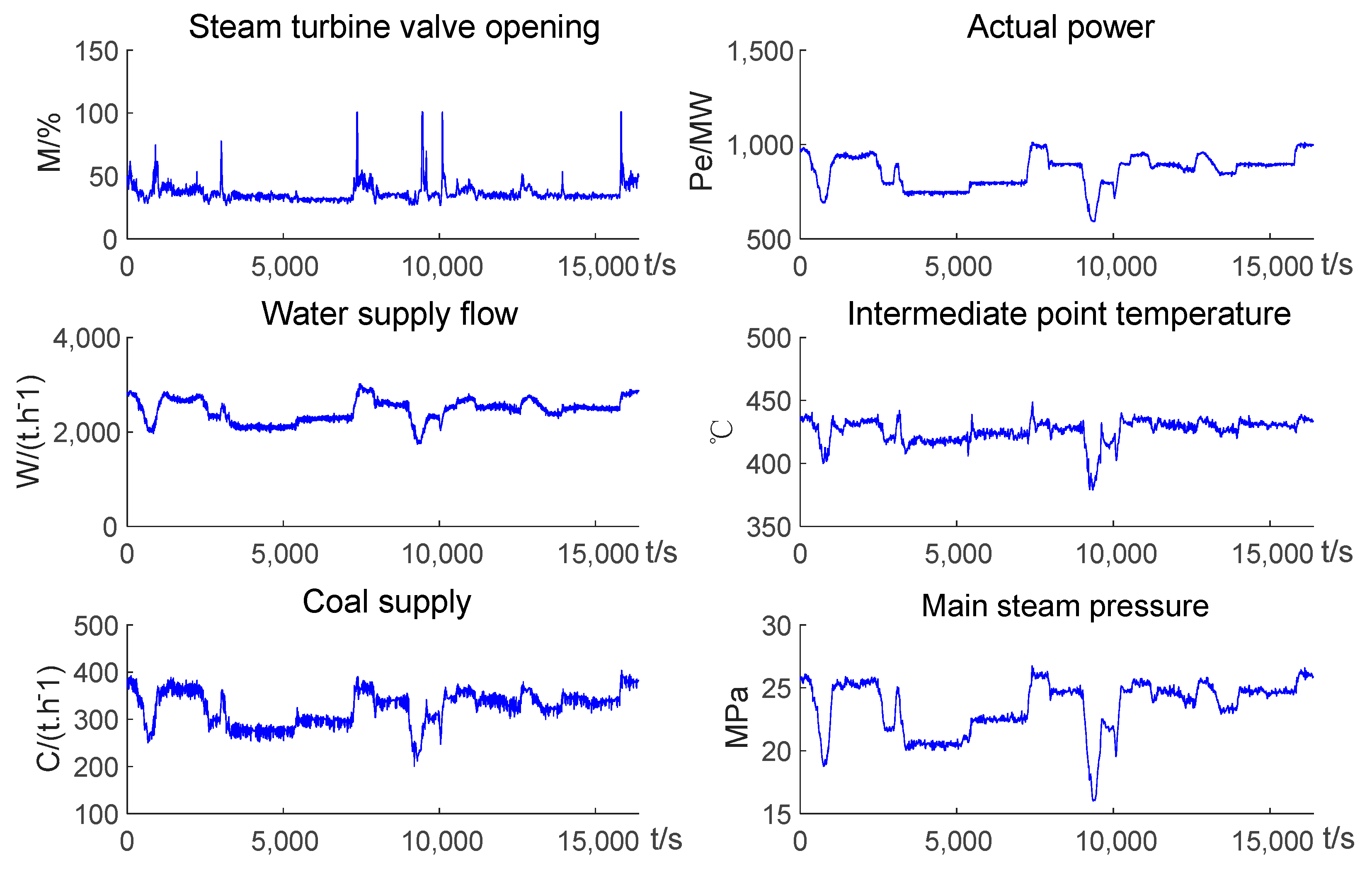
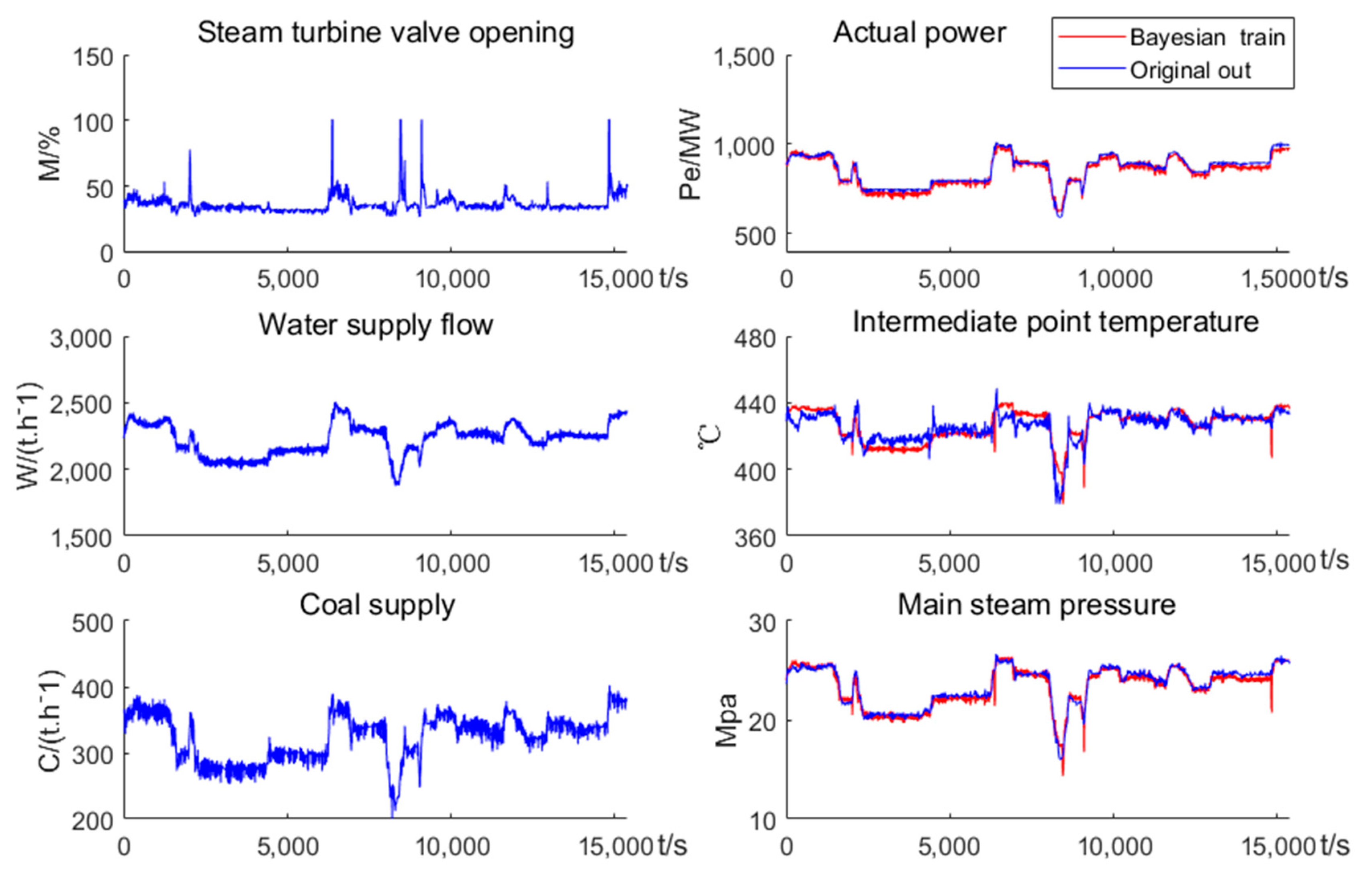
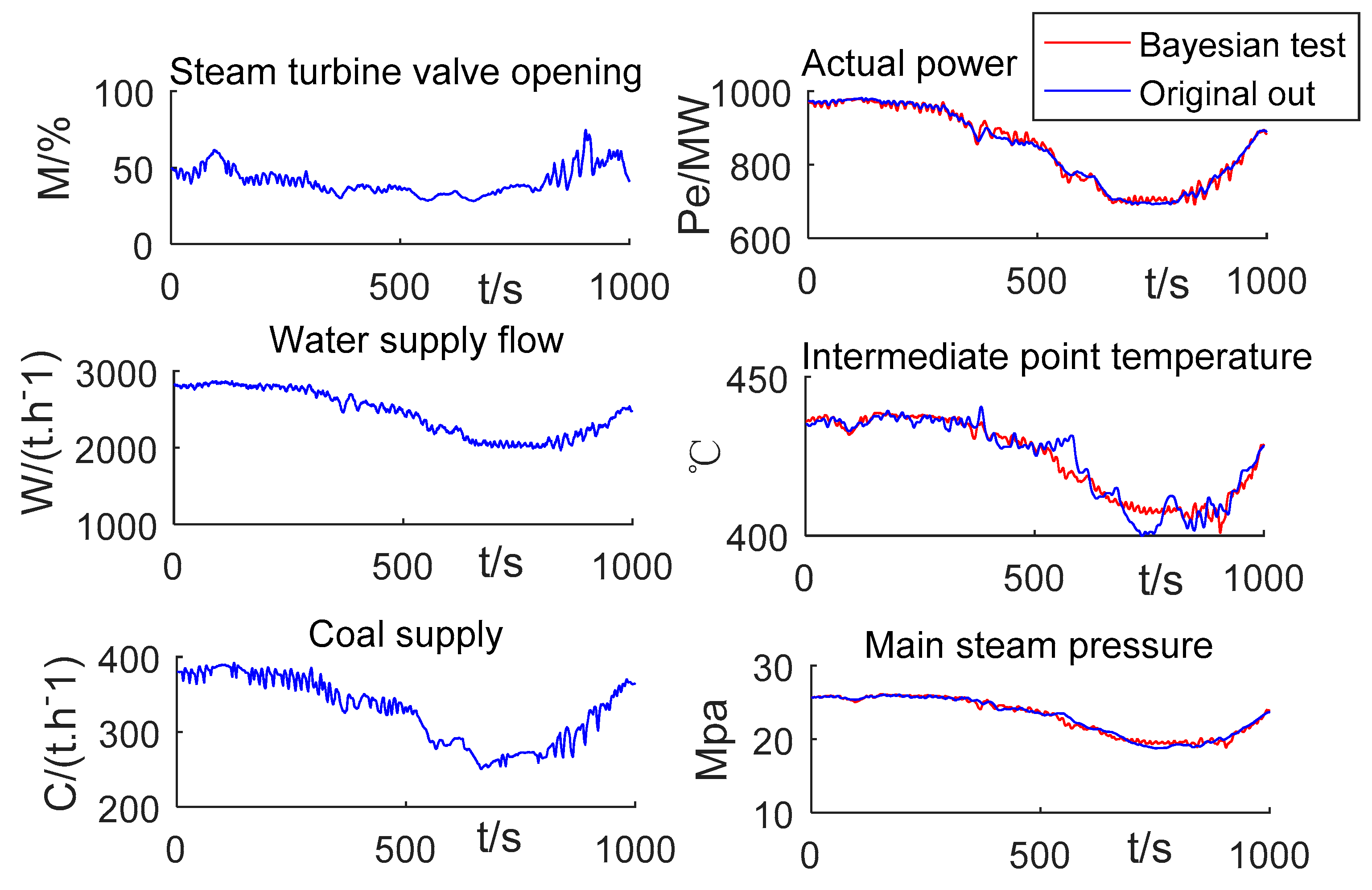
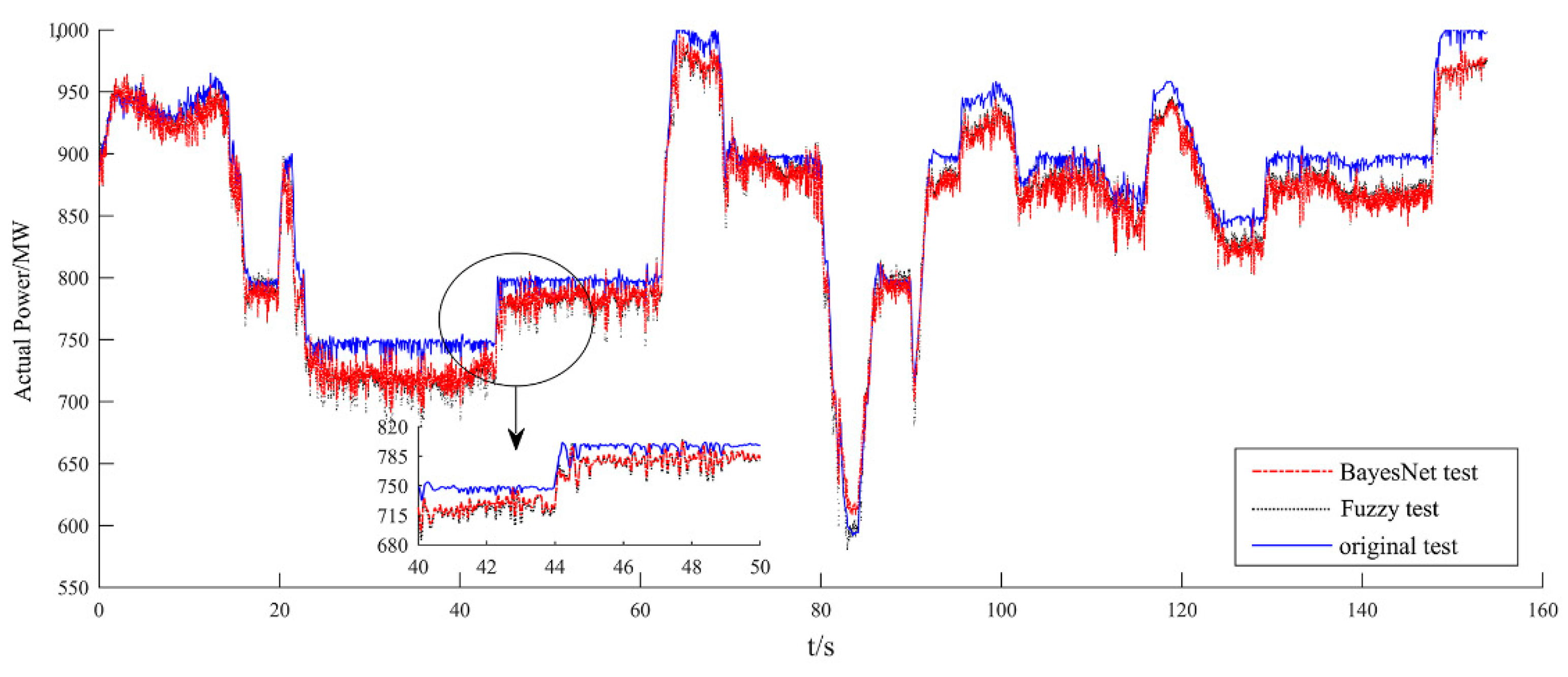
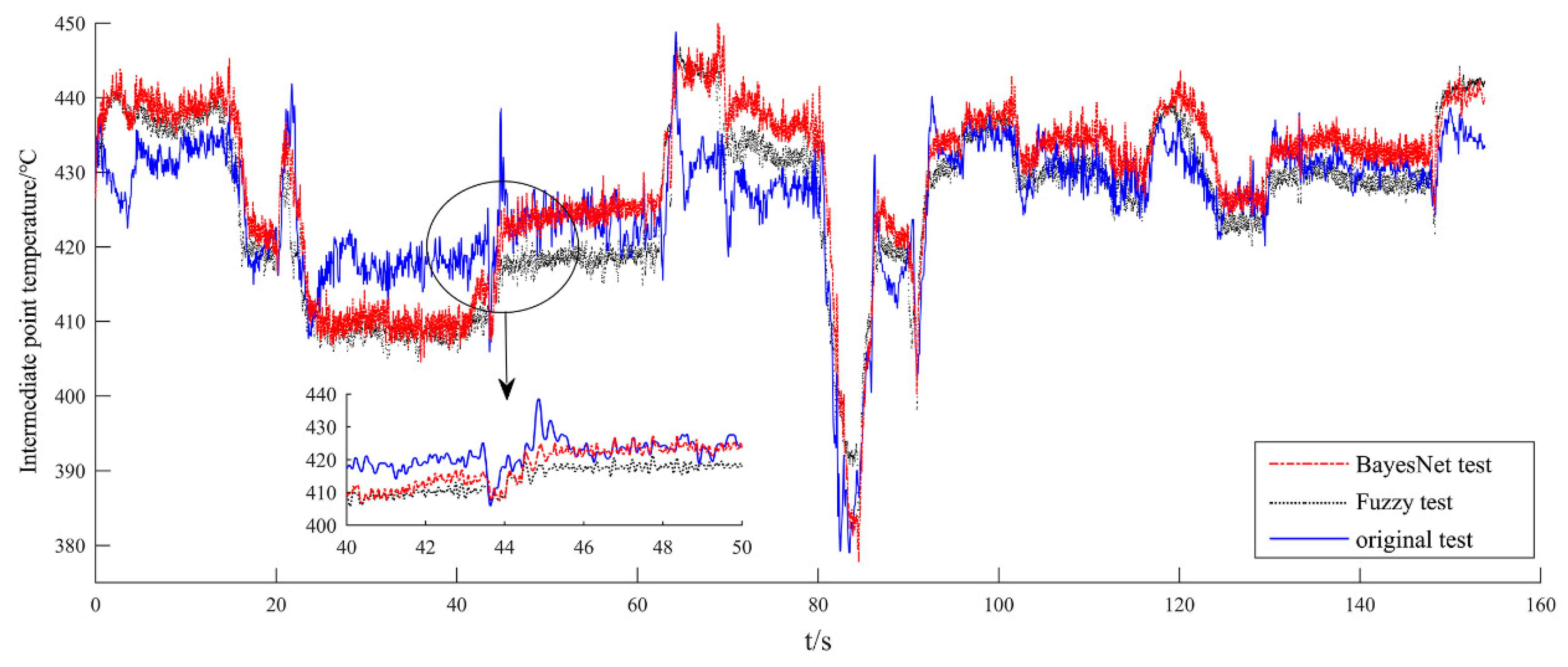
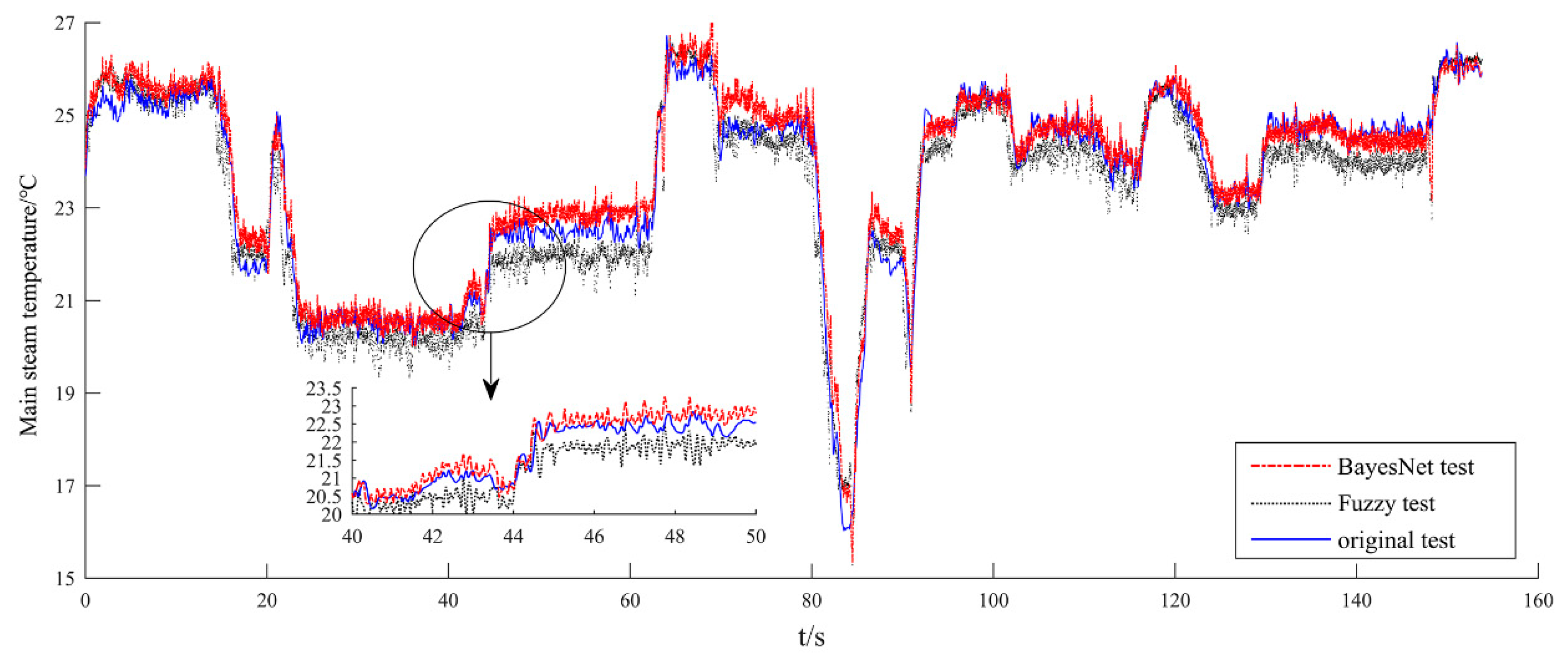
3.1. CCS Structure and Identification of AGC System
- Step 1:
- The original data were randomly divided into K parts, and this paper used K = 4;
- Step 2:
- One part was selected as the validation set, and the remaining K-1 was selected as the training set to train the model. After training, a model was obtained, and the model was verified with its corresponding verification set while, at the same time, recording the error and accuracy of K-fold cross-validation;
- Step 3:
- Step 2 was repeated K times, and the average of error and accuracy of K-fold cross-validation were calculated. This ensured that each subset had the opportunity to serve as a verification set and a training set so that the training and verification samples were distributed uniformly;
- Step 4:
- Test sets were used to test the trained identification model and record the error and accuracy of K-fold cross-validation.
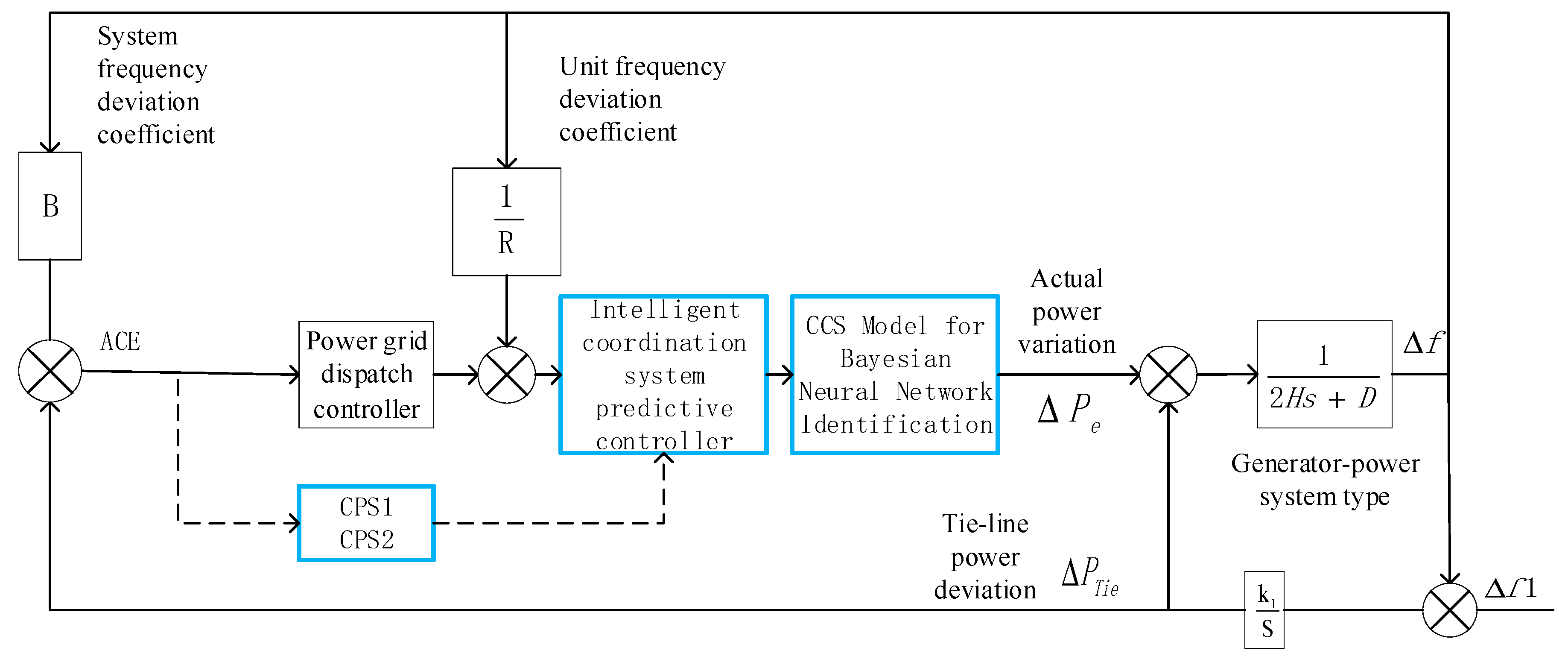
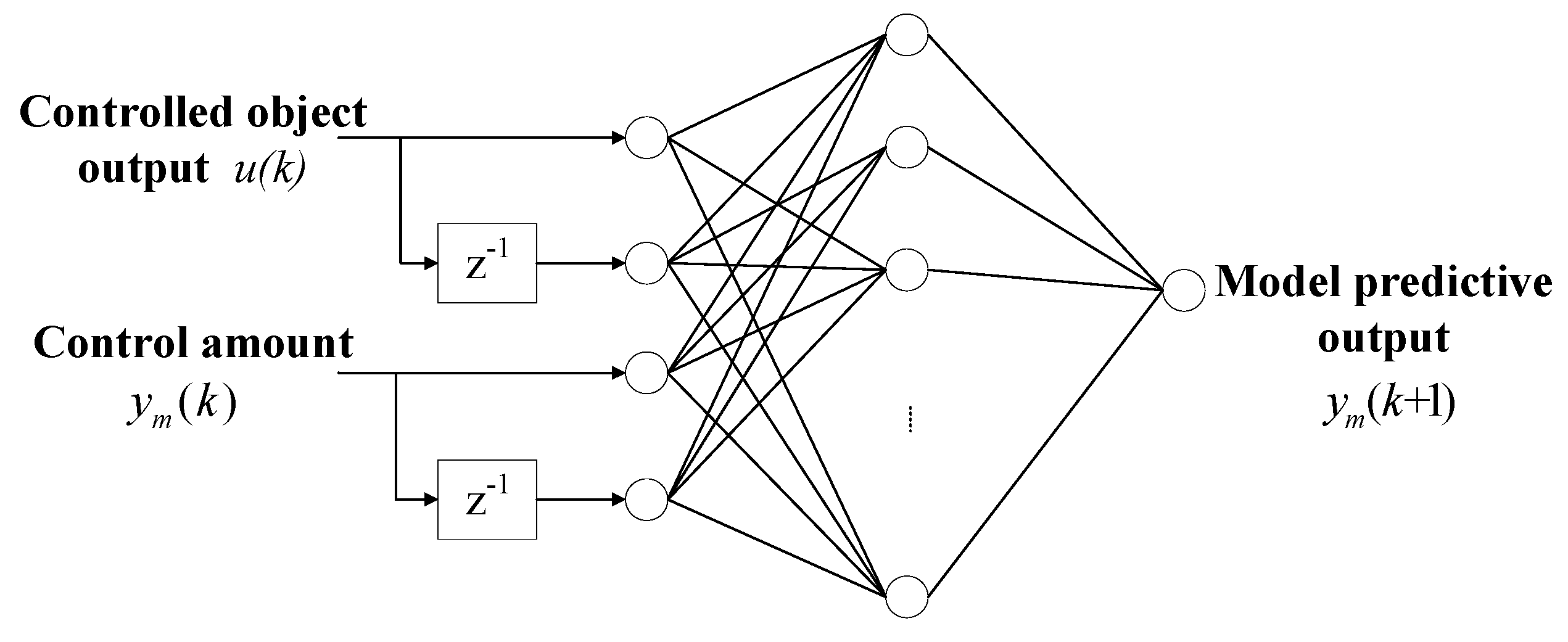
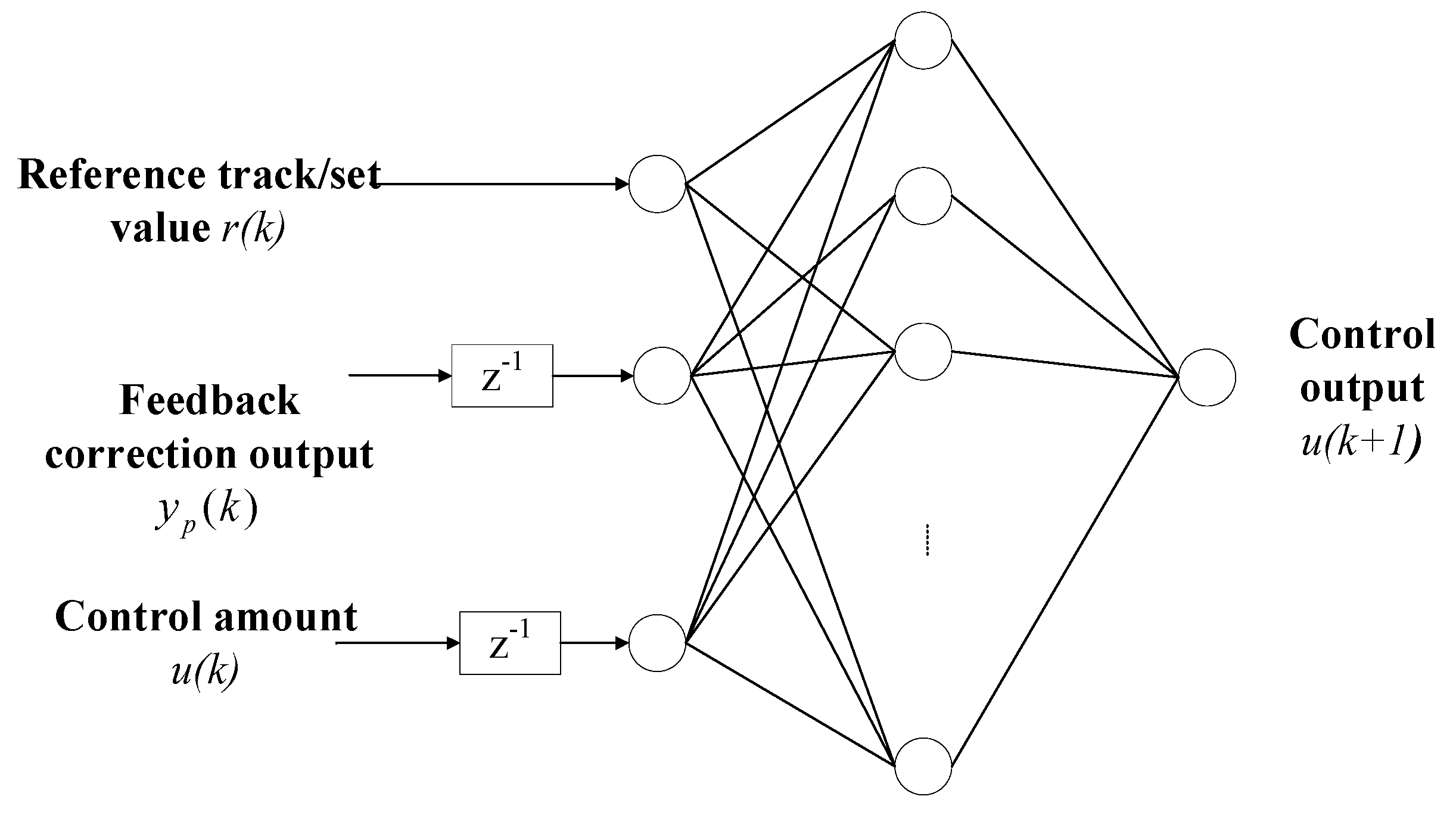
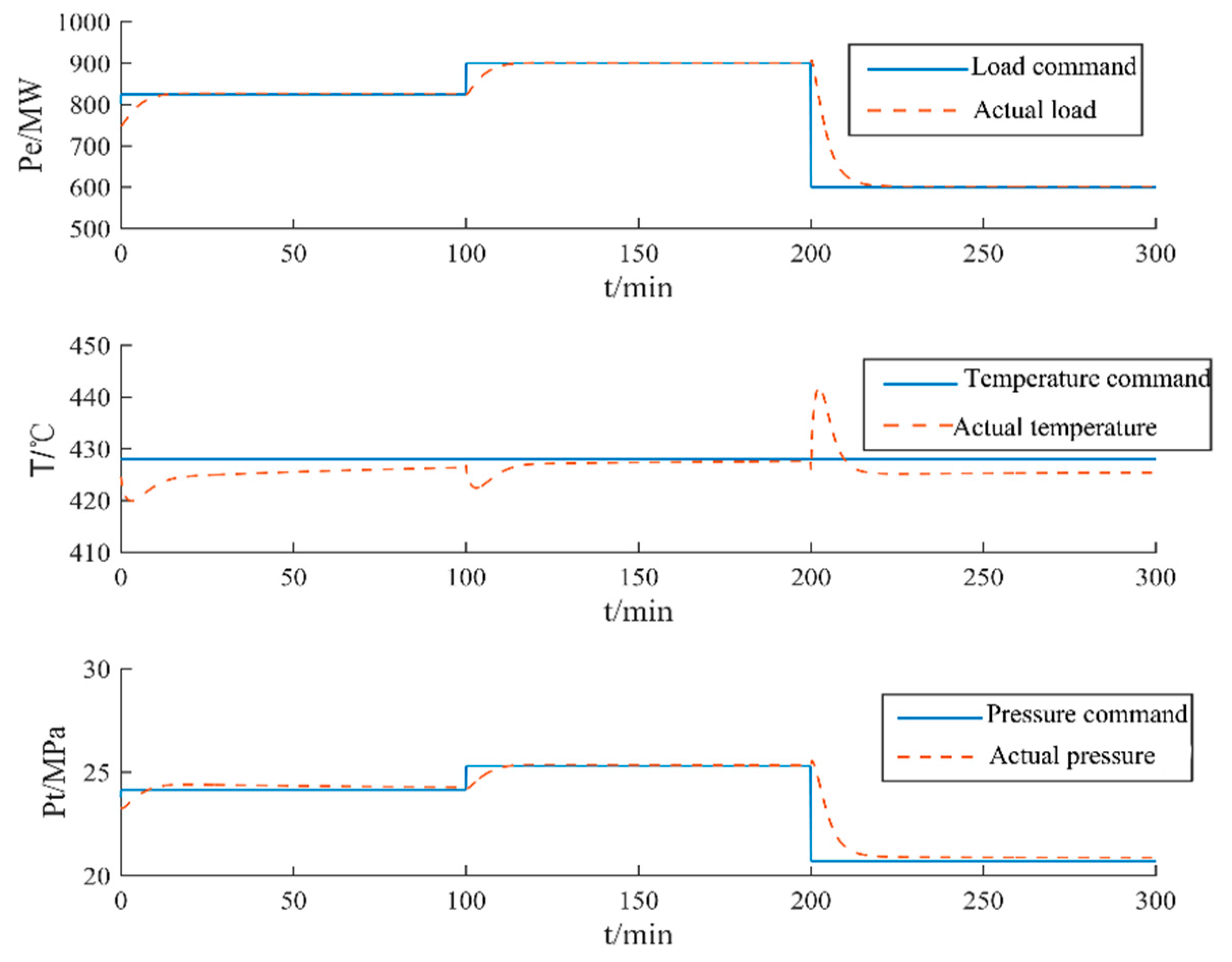
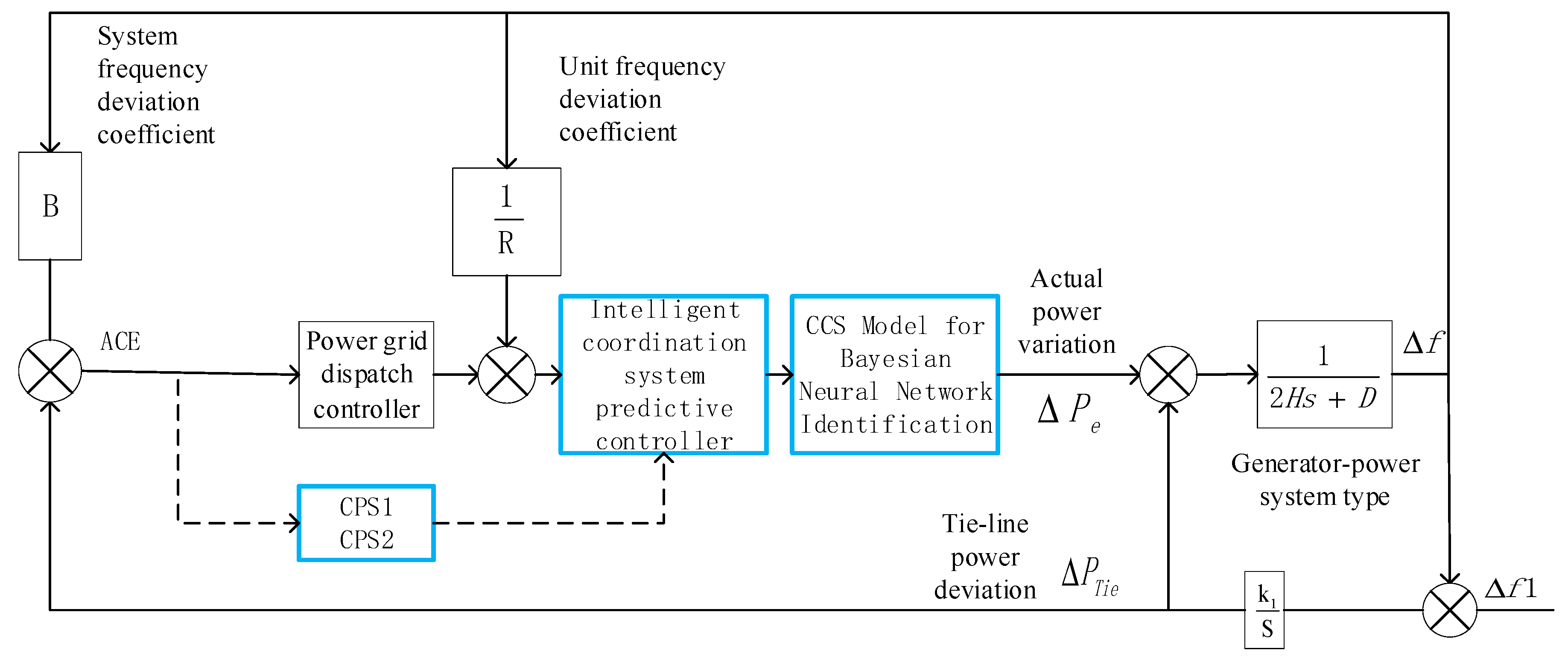
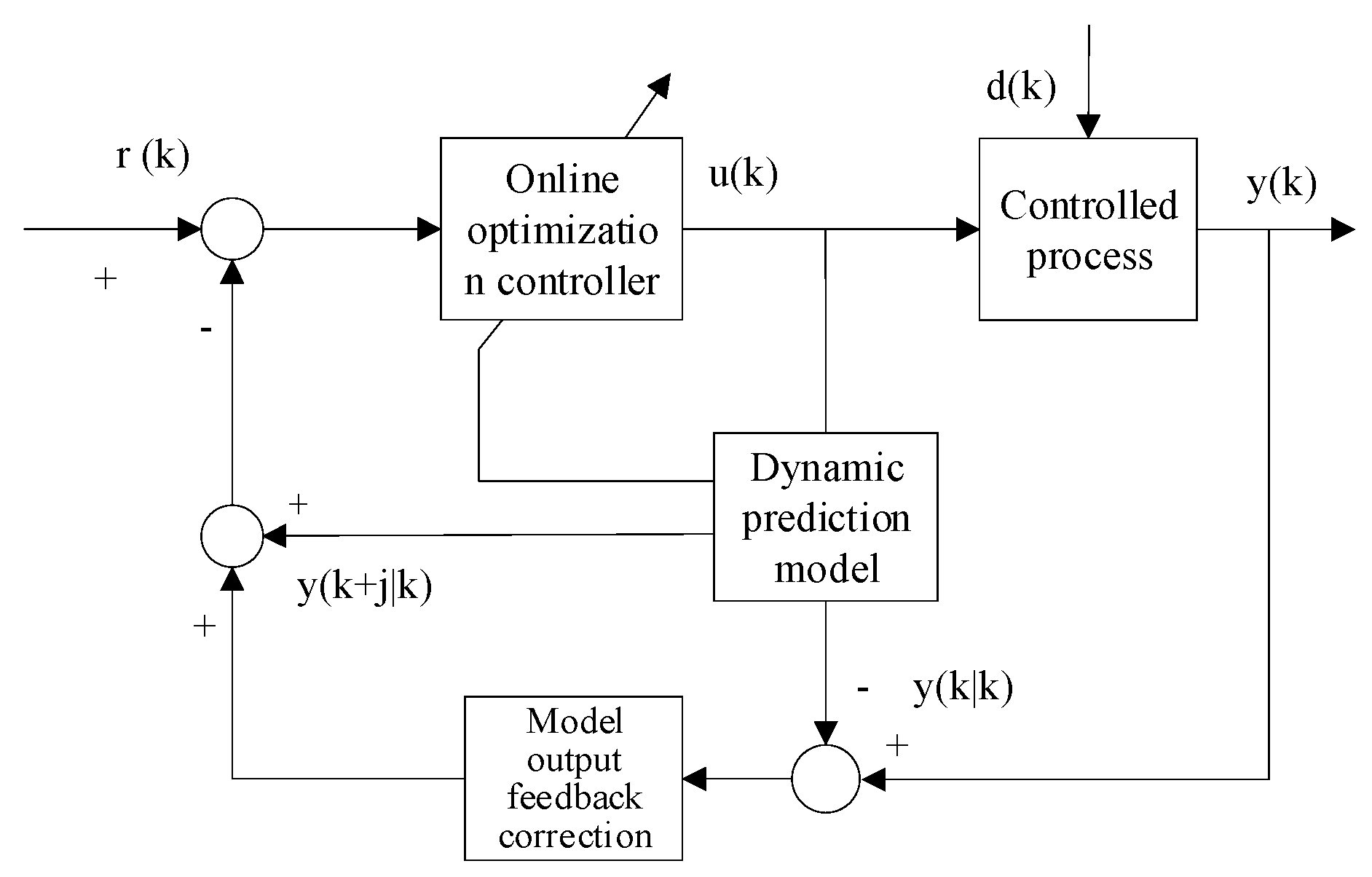
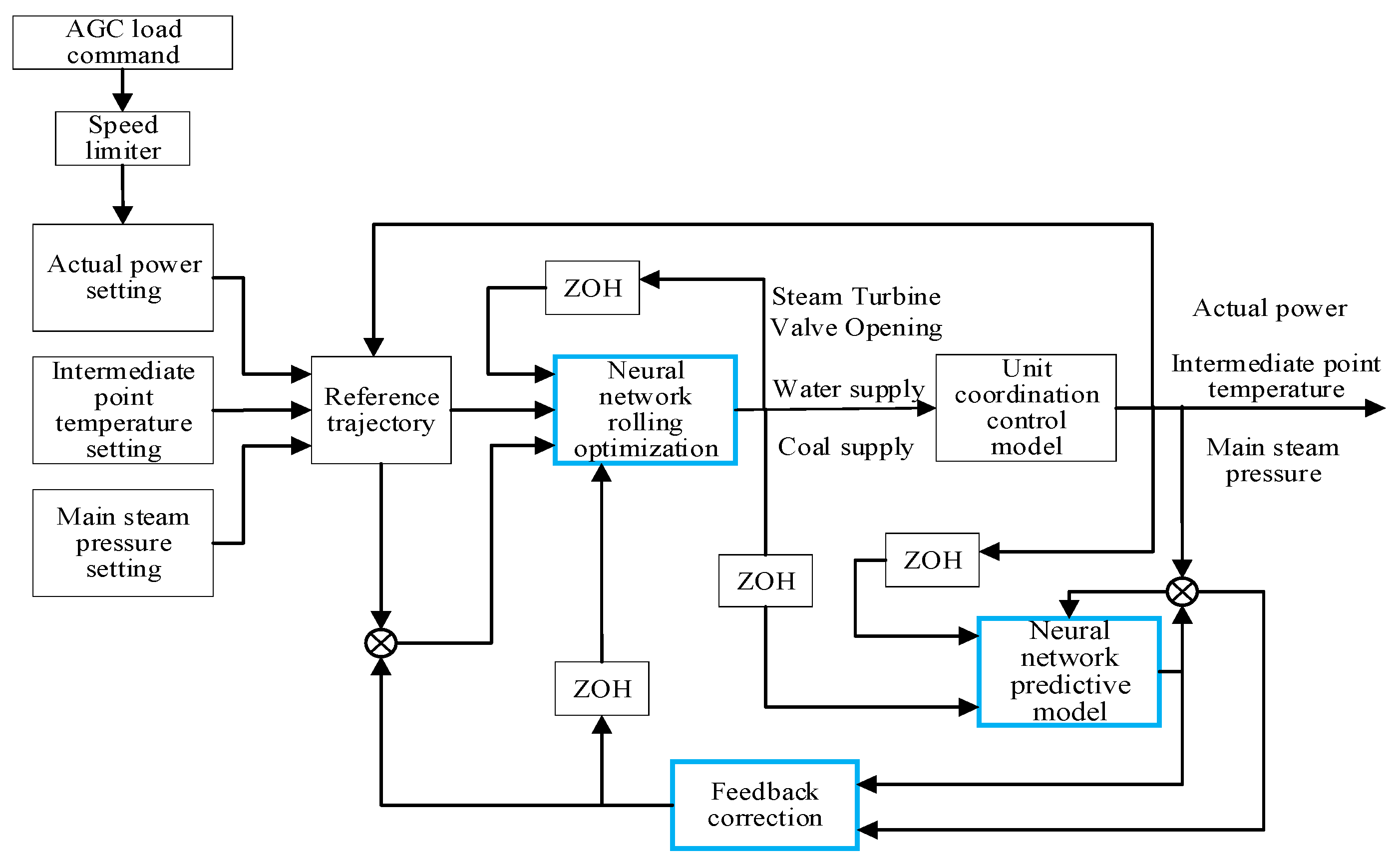
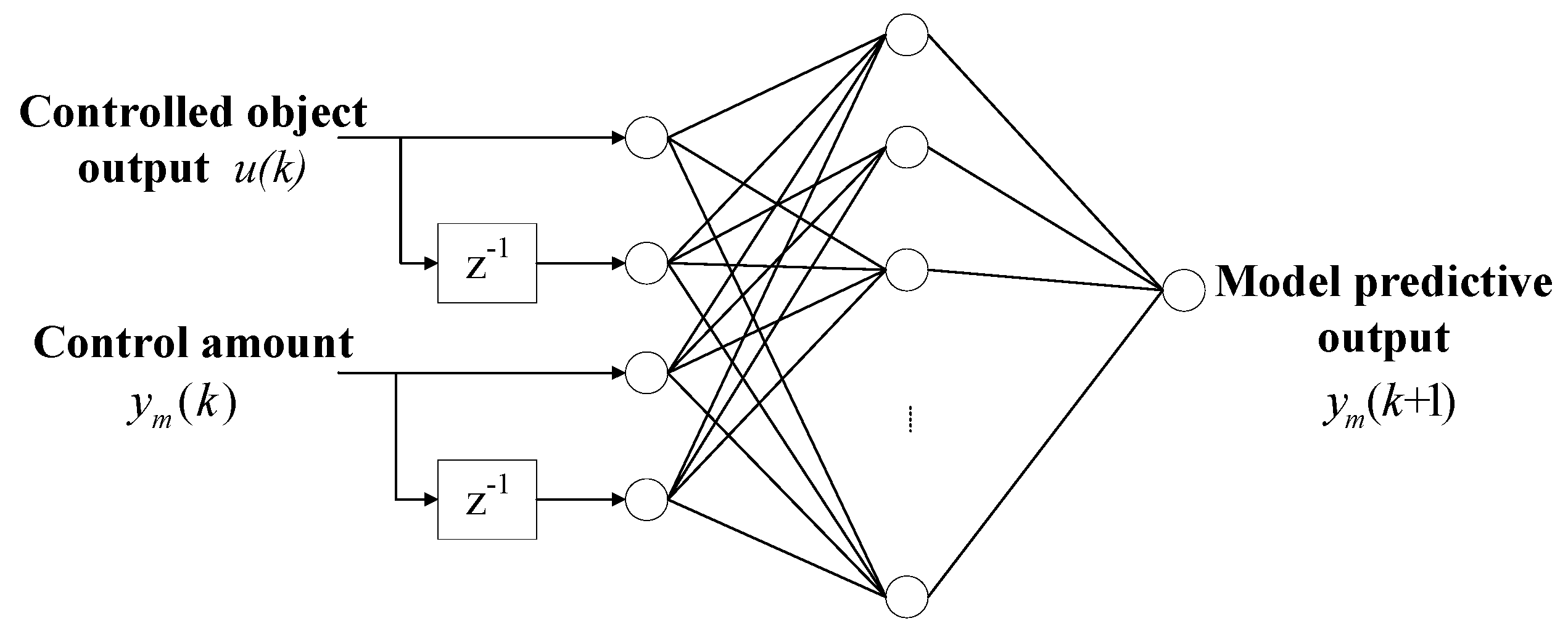
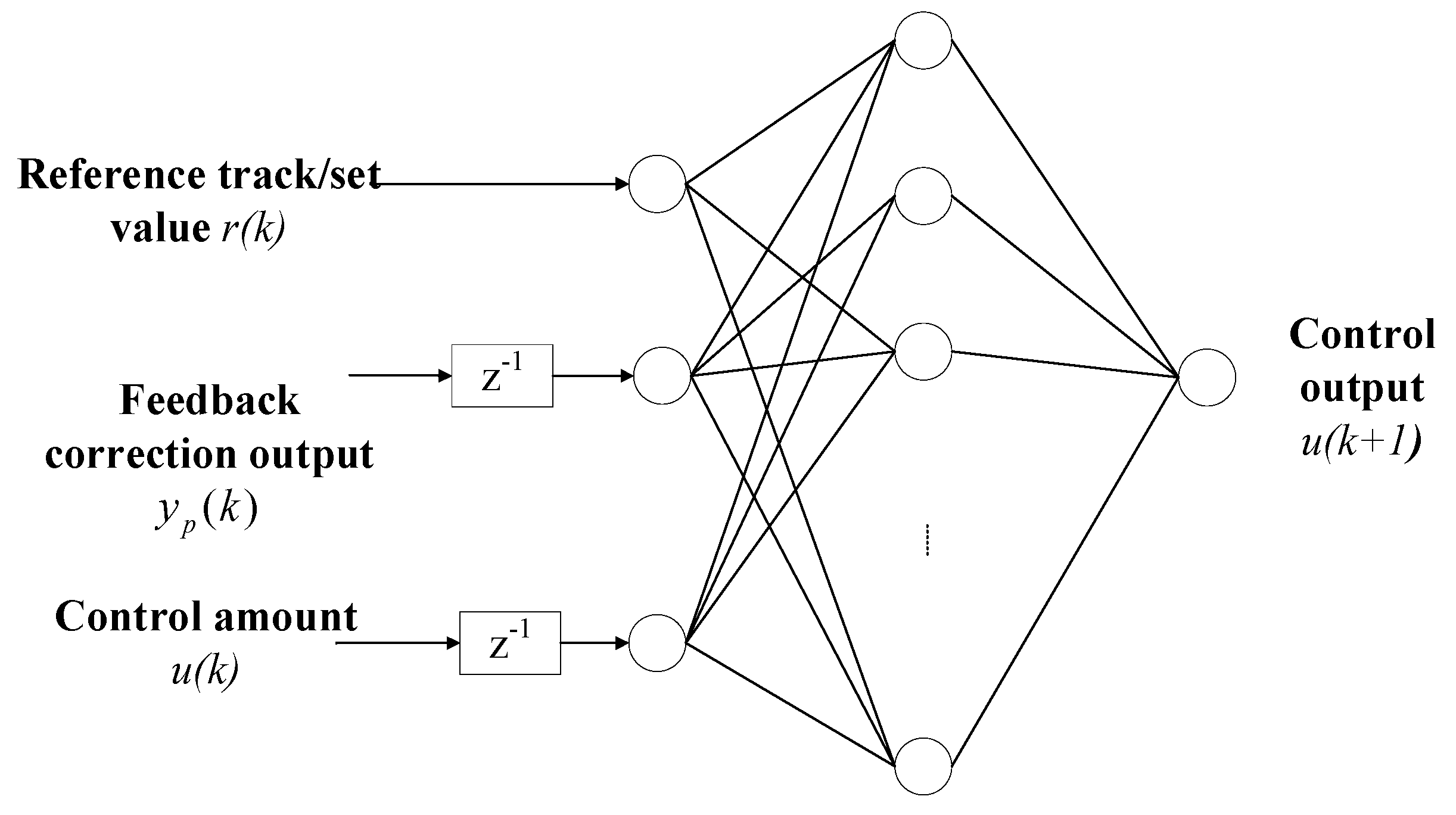
3.2. Design of an AGC Intelligent Predictive Control System Based on CPS.
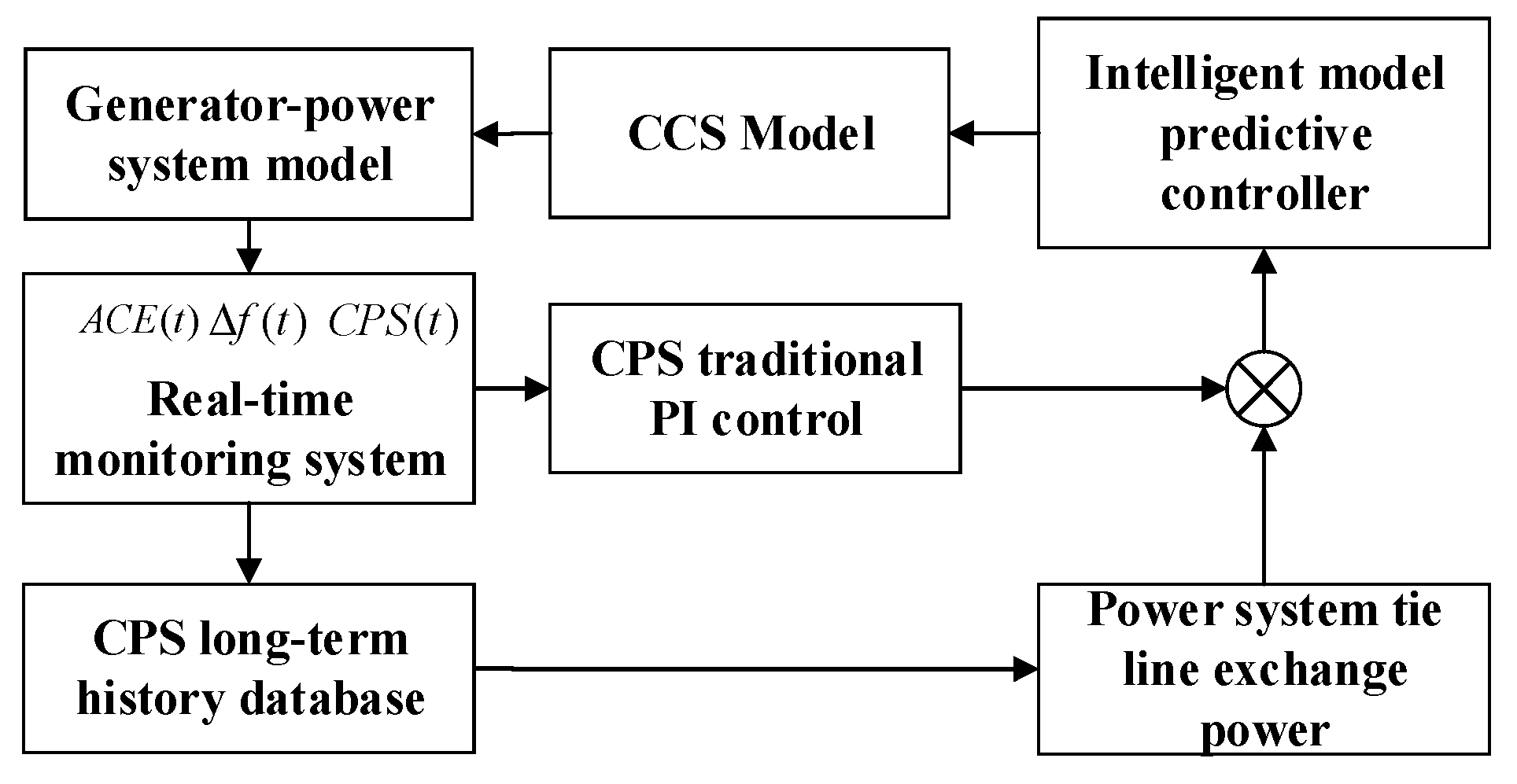
3.3. CPS Control Principle in a Multi-Area, Interconnected Power Grid
- (a)
- // in the real-time monitoring system monitor the instantaneous values of ACE and CPS.
- (b)
- CPS in the long-term historical database records CPS statistics per hour, day, and year.
- (c)
- The traditional CPS PI controller consists of CPS1 and CPS2 controllers with PI structures, and a coordination controller. This coordinates the output of each controller in accordance with the standard CPS.
- (d)
- The intelligent predictive controller module predicts the next output of the power prediction system according to traditional PI control of the CPS and power system tie lines.
4. Simulation Analysis of the AGC Intelligent Predictive Control System Based on CPS
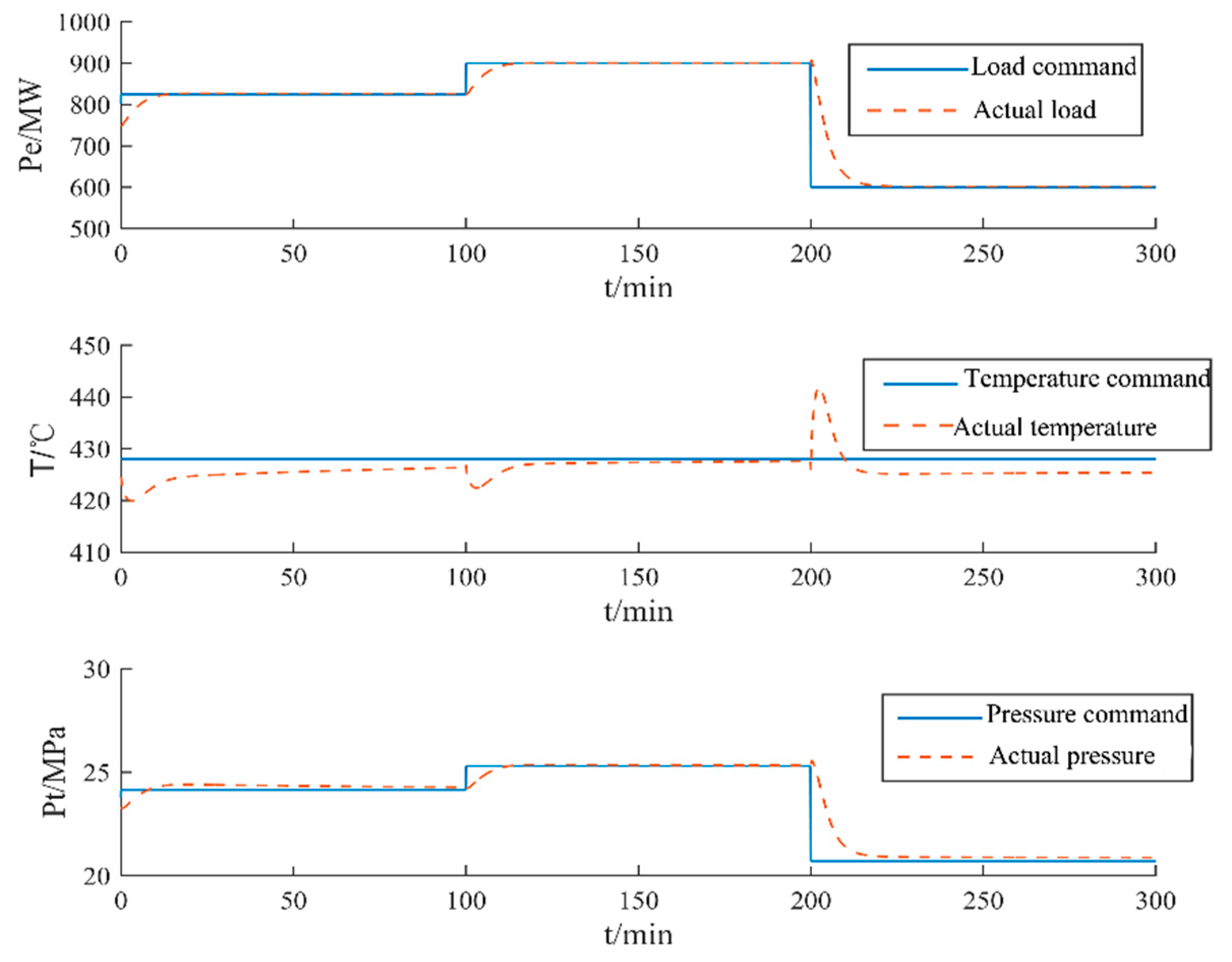
4.1. Test and Simulation of the Response Capability of the AGC system
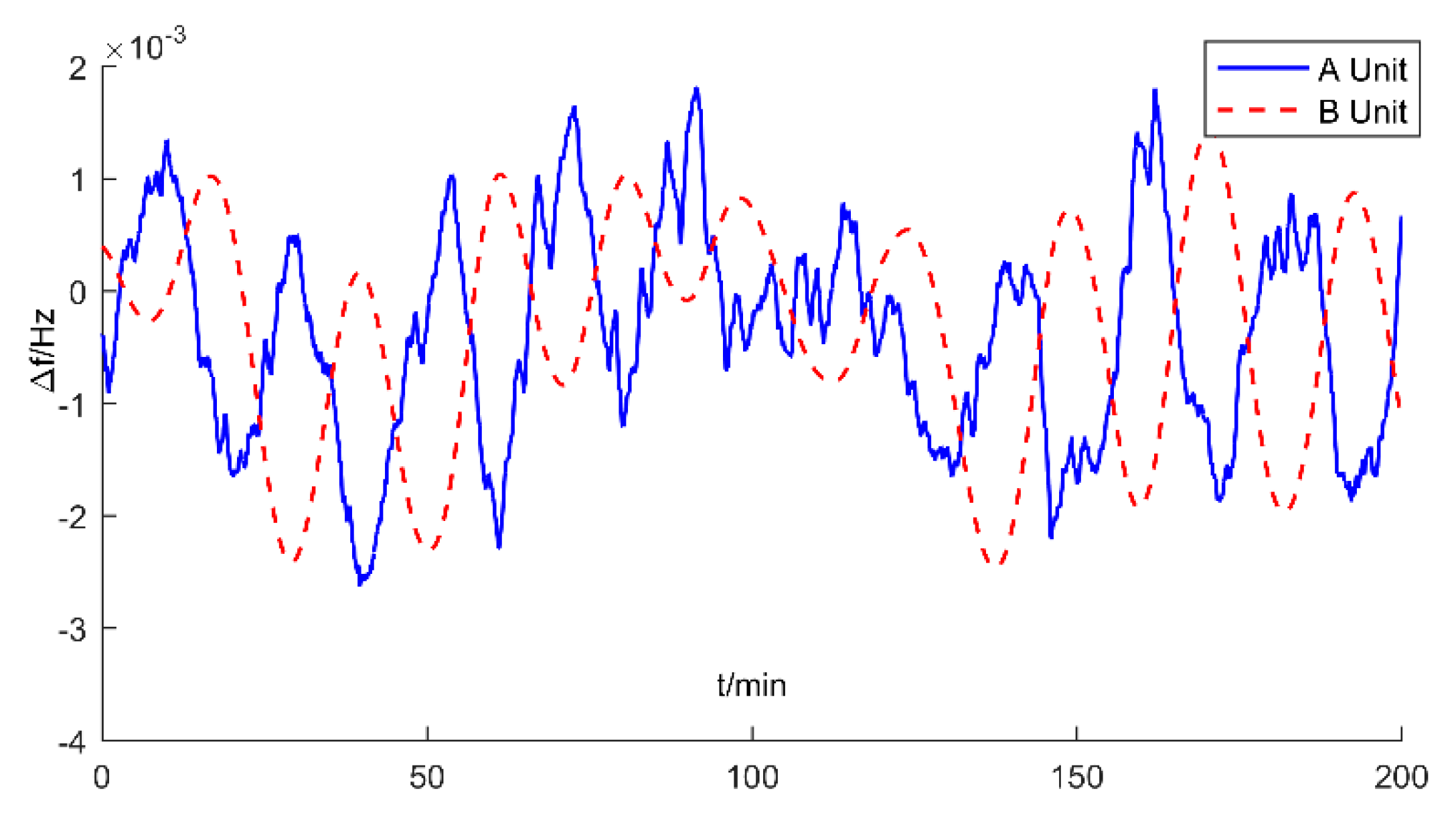
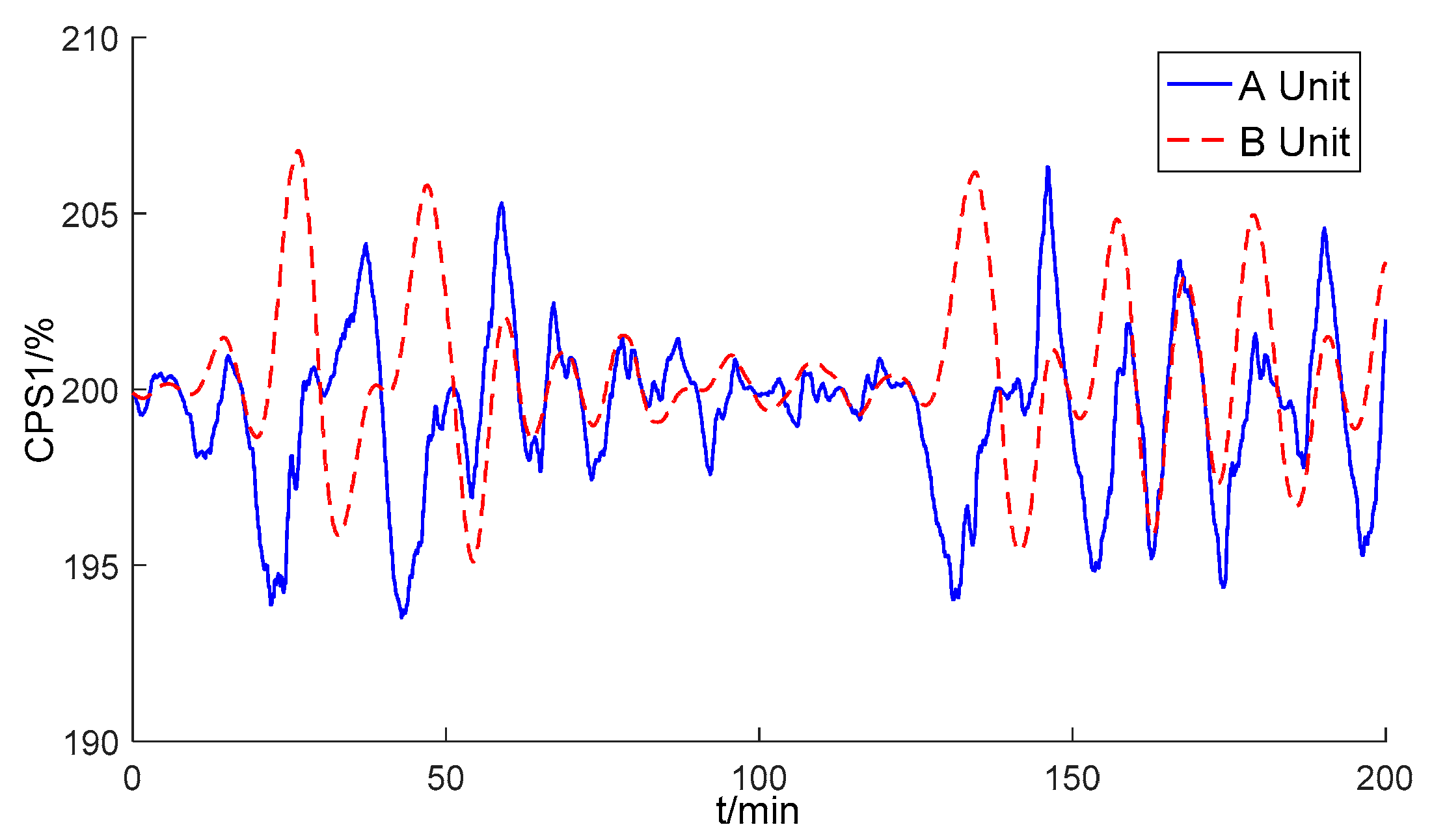
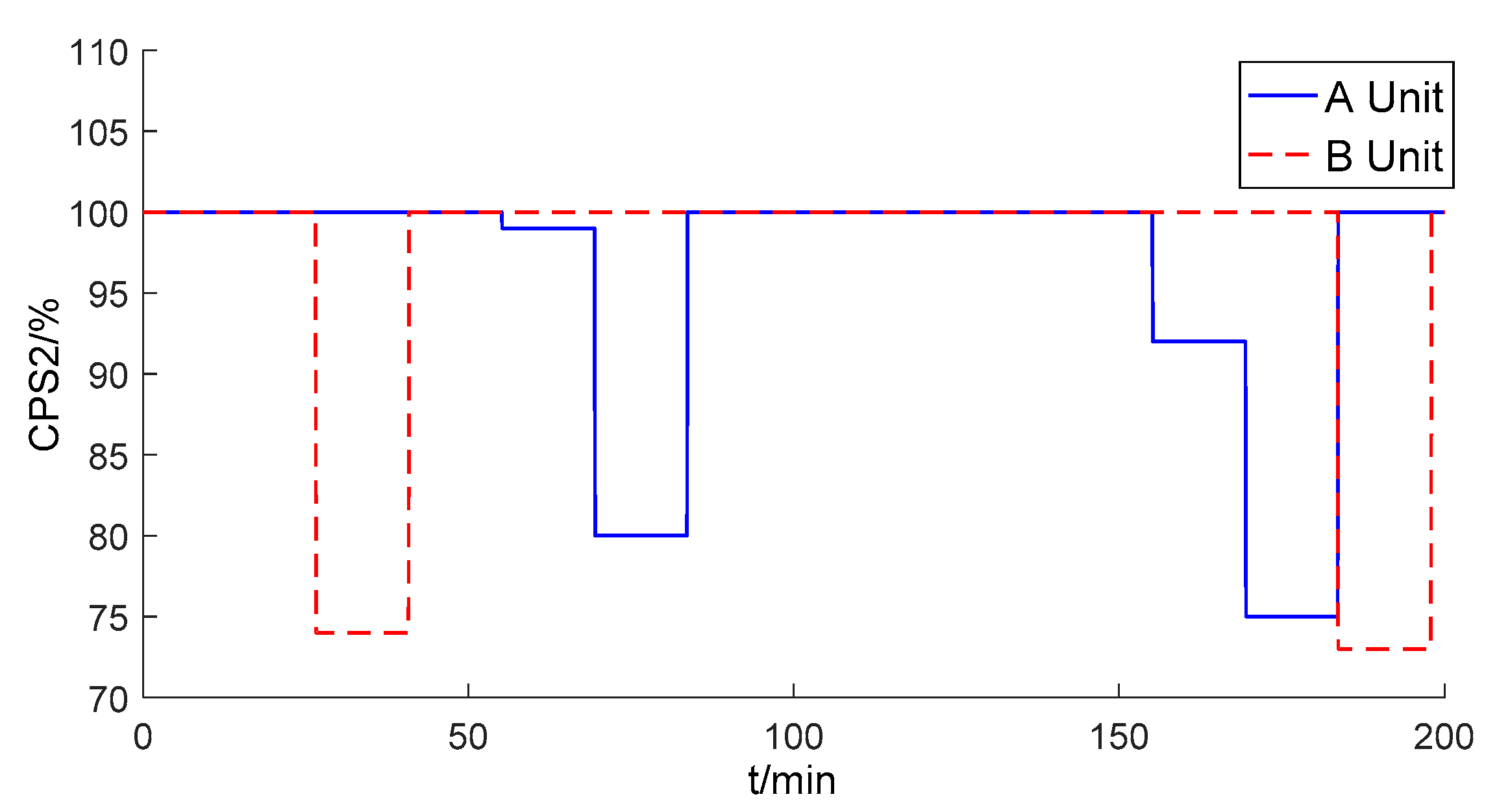
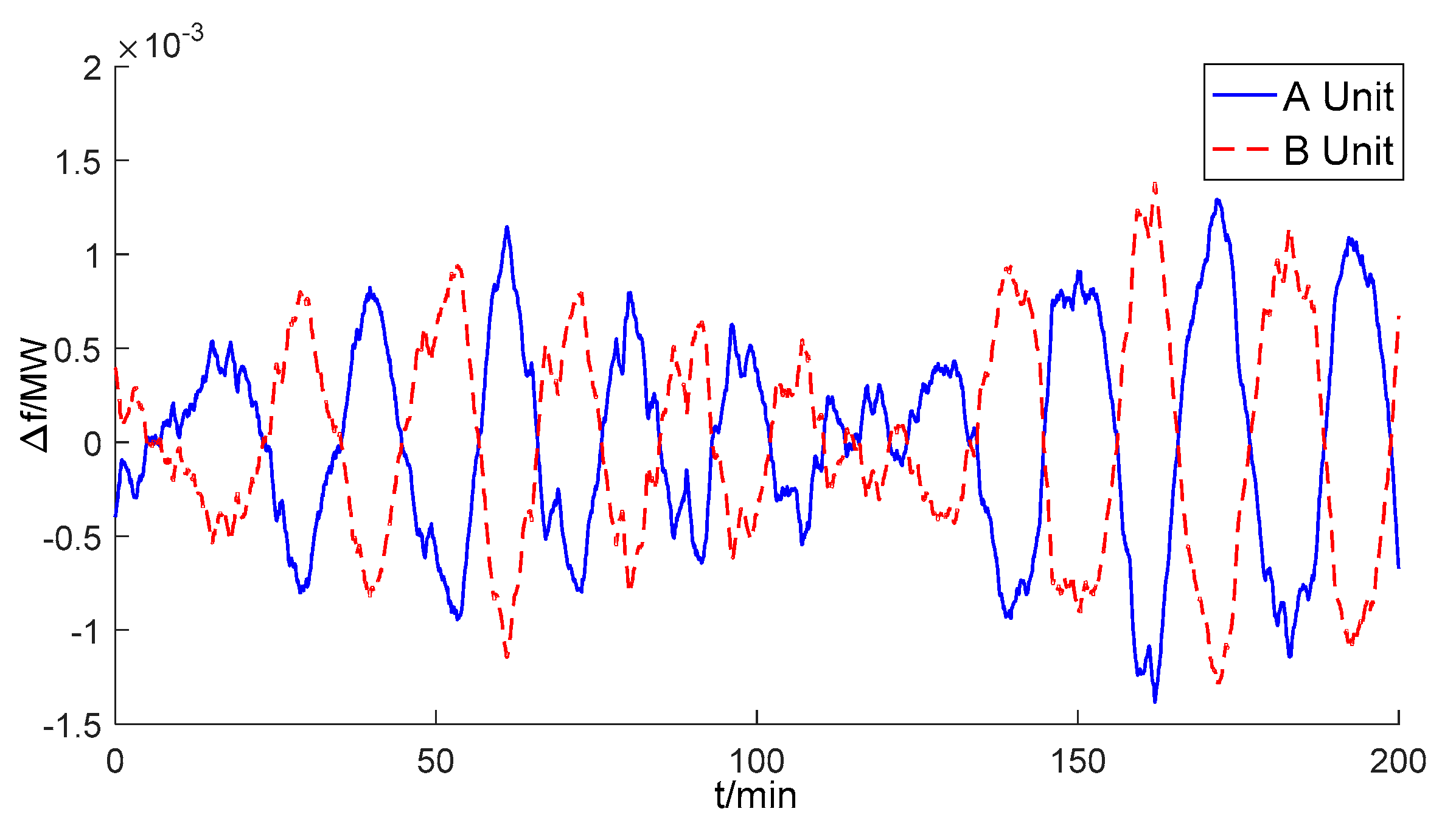
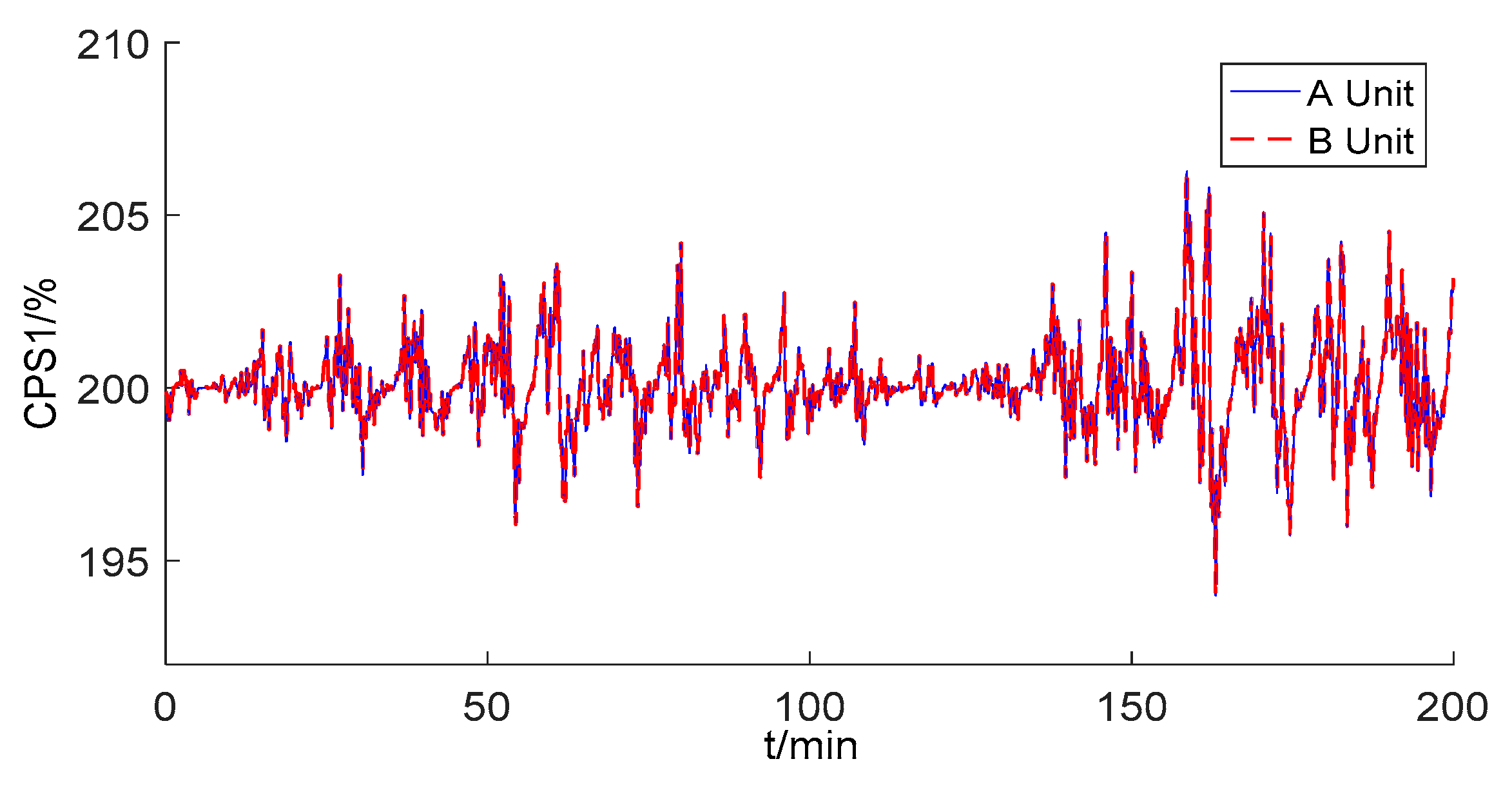
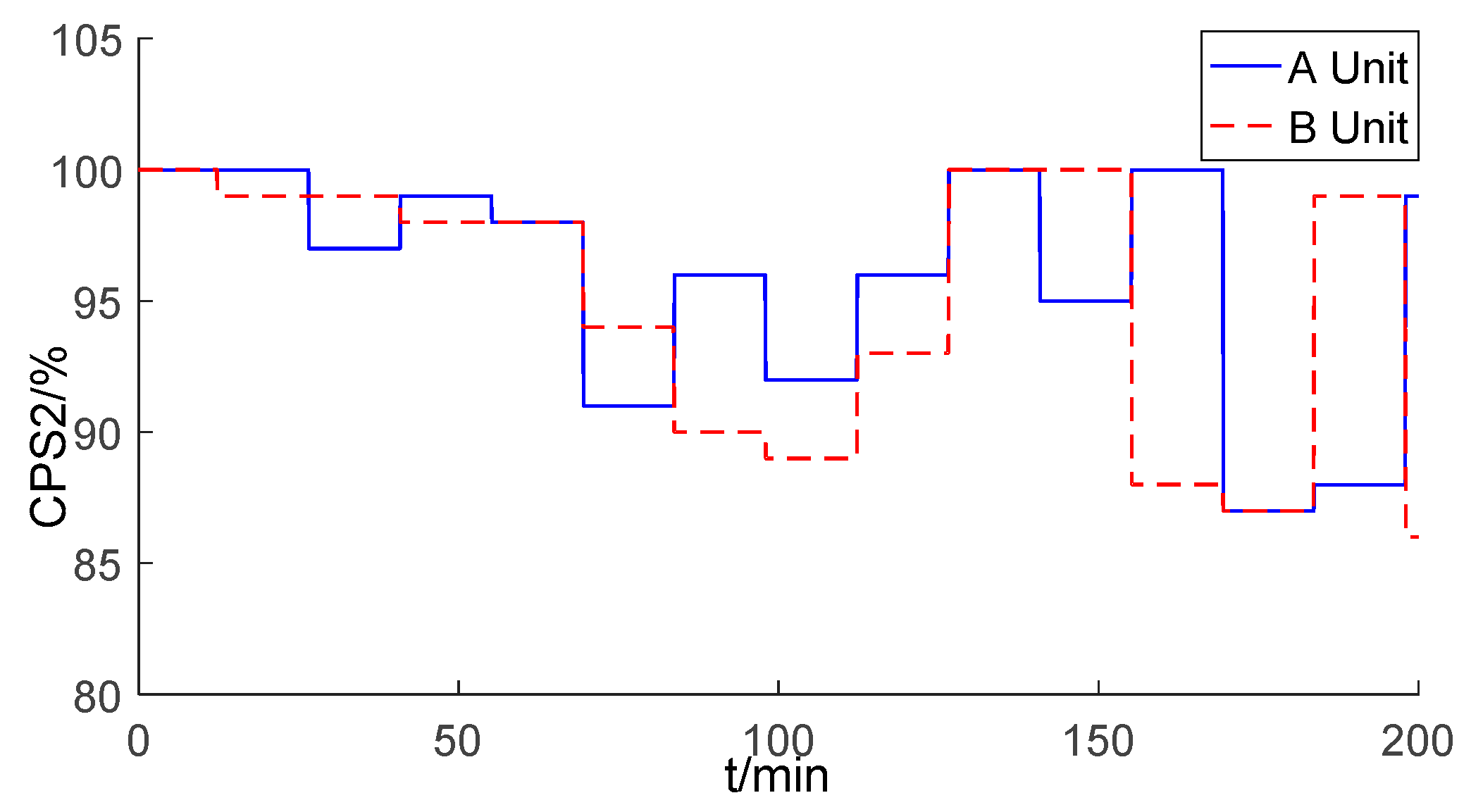
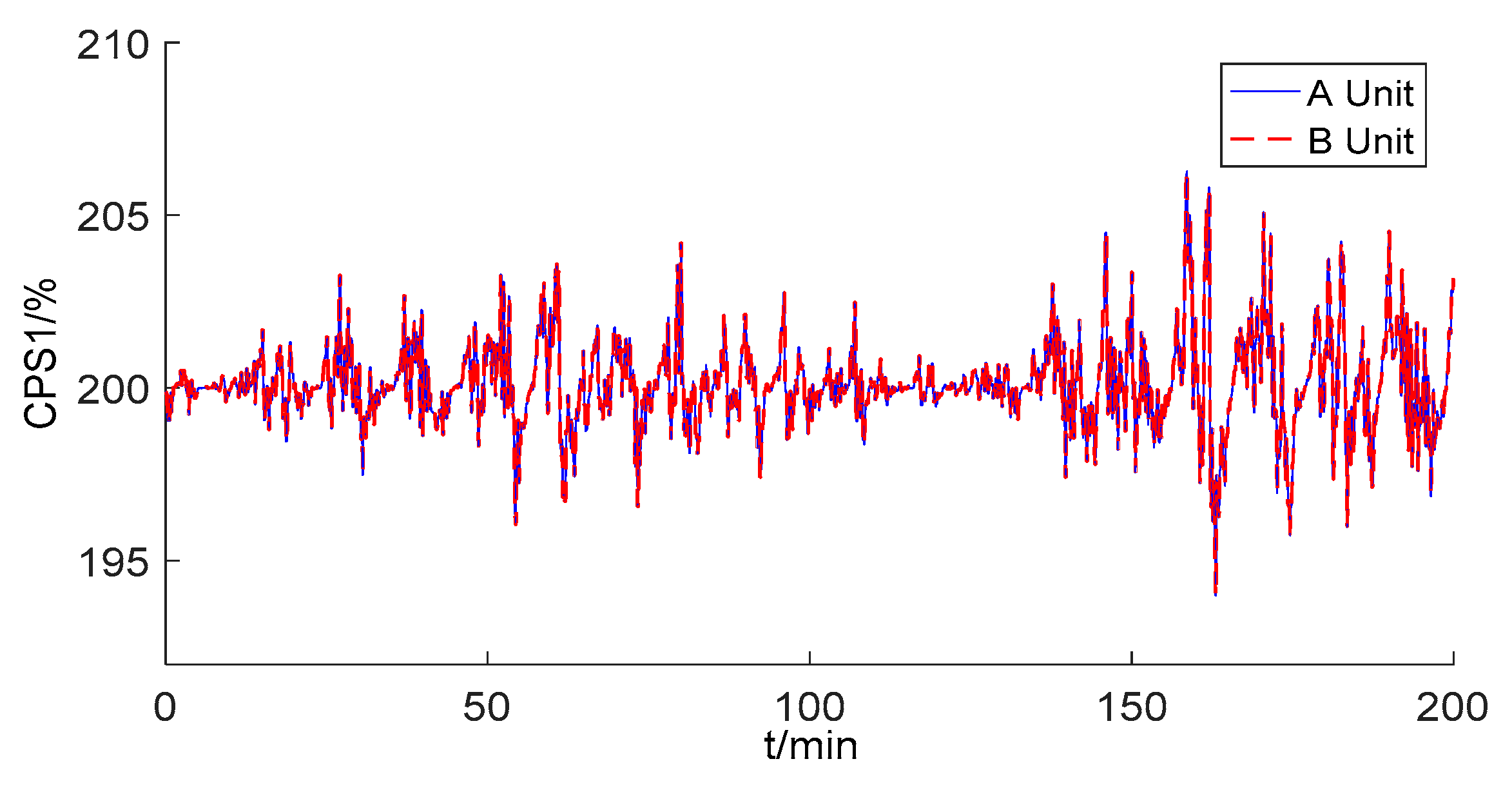
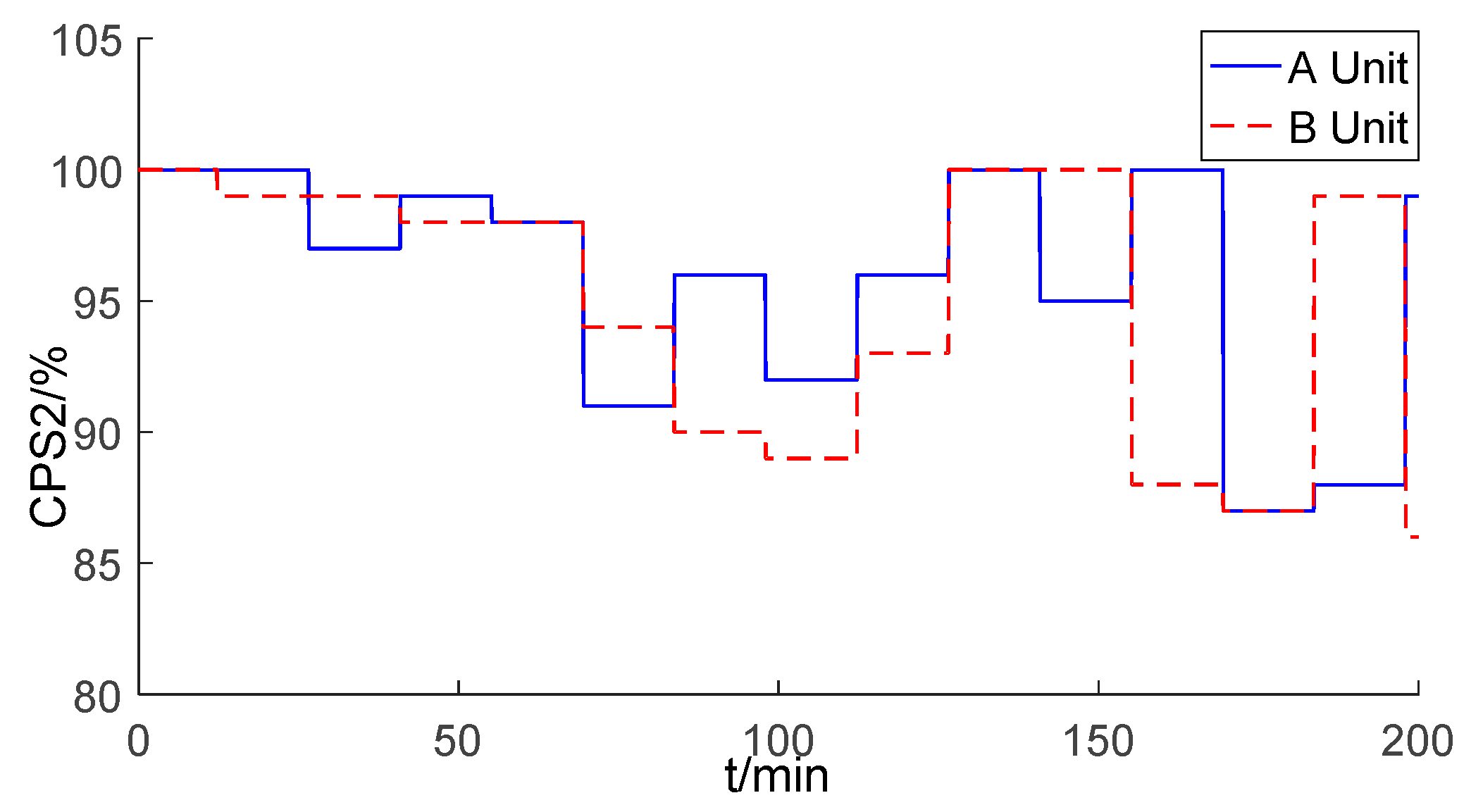
4.2. Analysis of the Control Effecst of Two Interconnected Units under CPS
5. Conclusions
- (1)
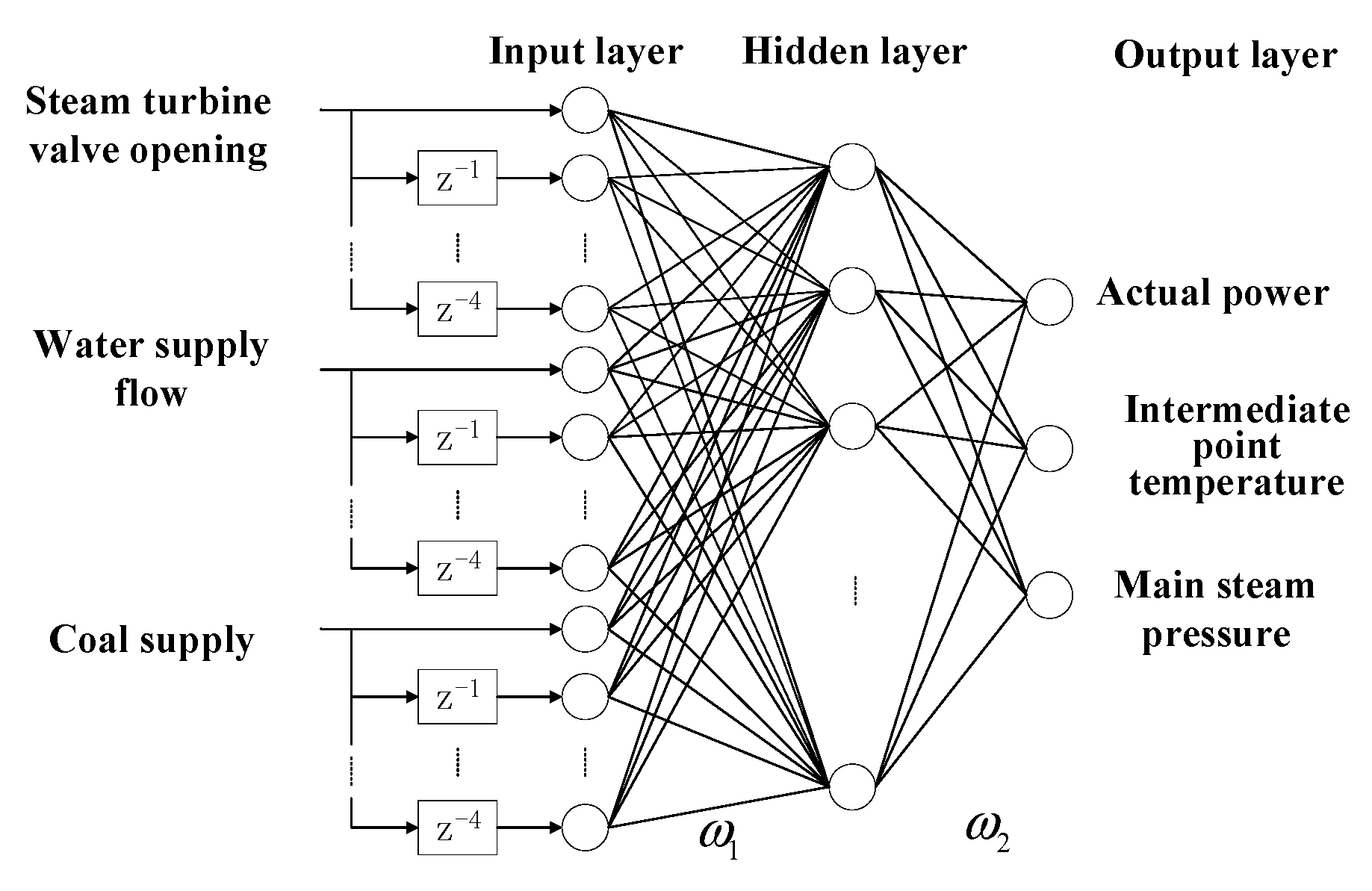
- According to the field data, a CCS model was obtained through Bayesian neural network identification, which was regarded as the real model of the system. Through K-fold cross-validation and algorithm comparison experiments, the results showed that the Bayesian neural network had good recognition effect, and it was suitable for identifying CCS systems.
- (2)
- An AGC intelligent predictive controller based on CPS was designed and combined with predictive control and neural network ideas. It could improve the control performance of the system and achieved a good load, following effects under a sliding pressure operation mode.
- (3)
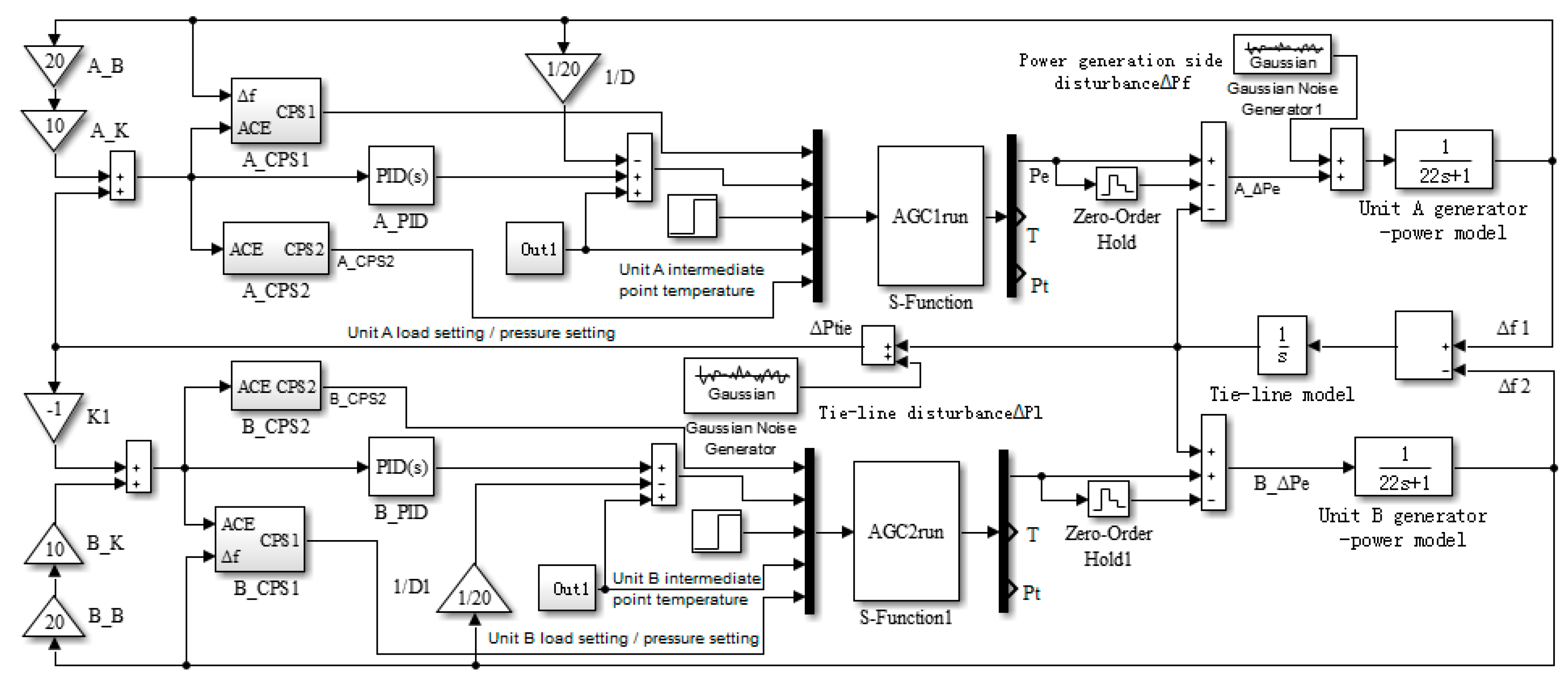
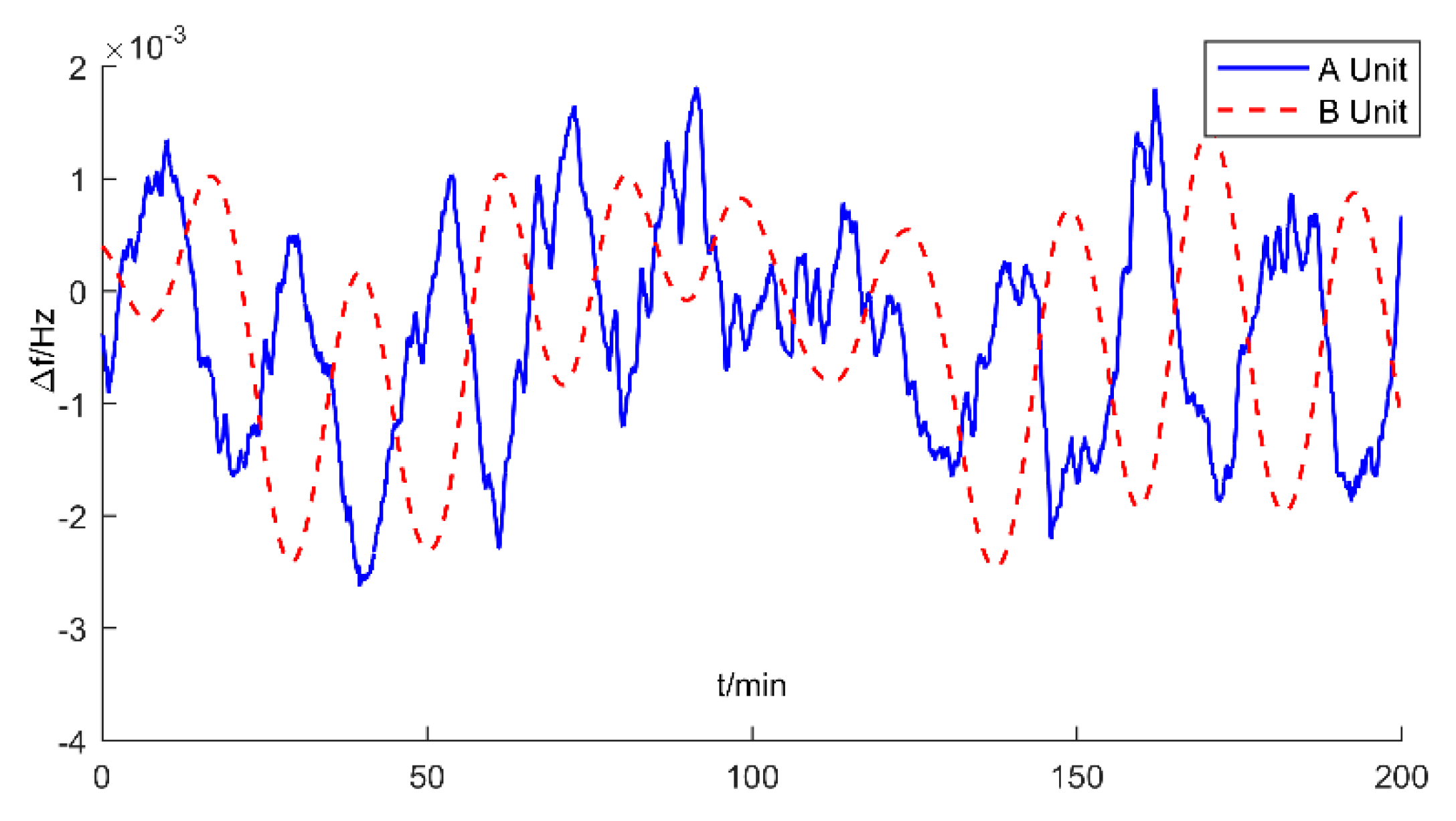
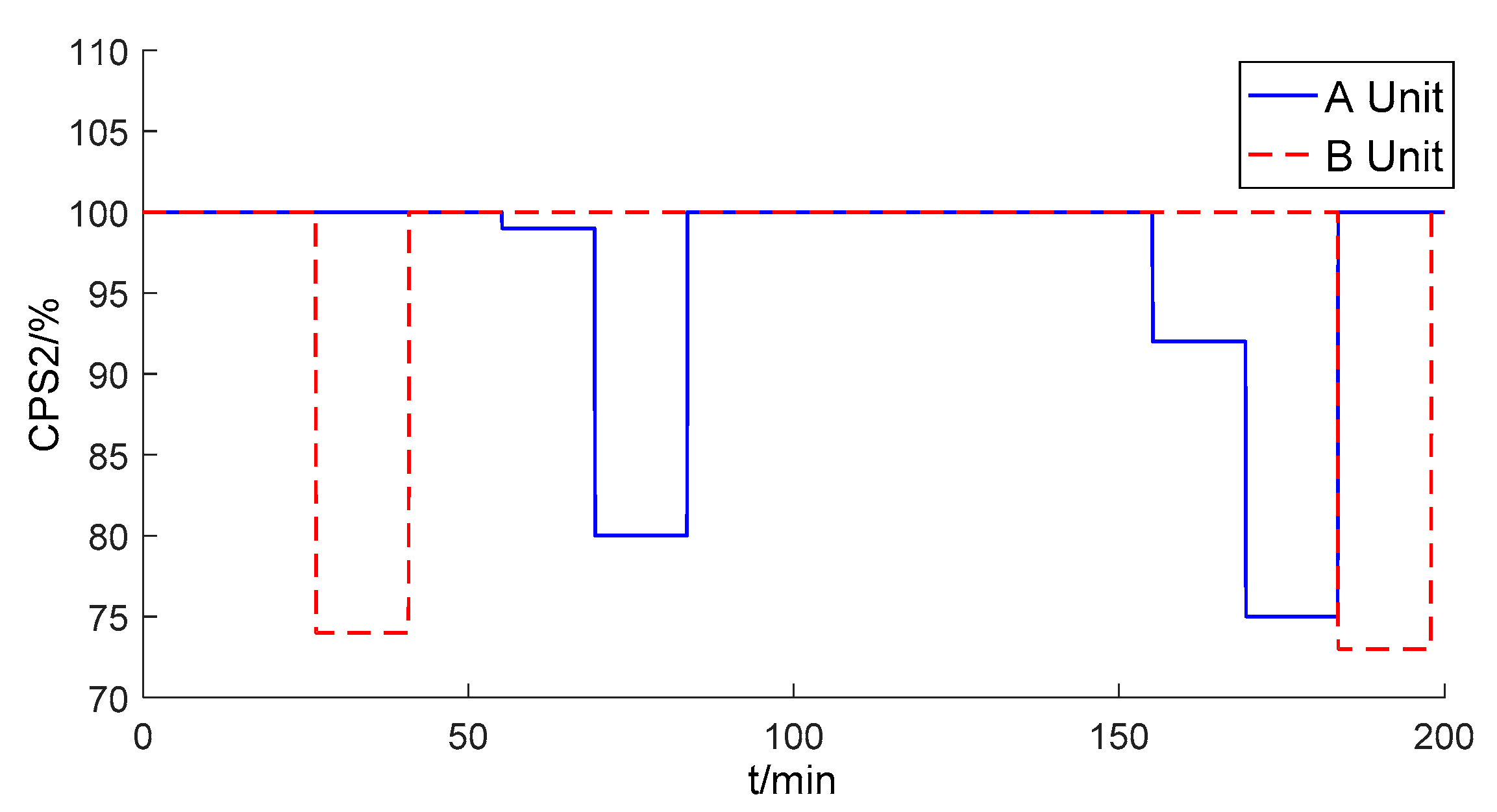
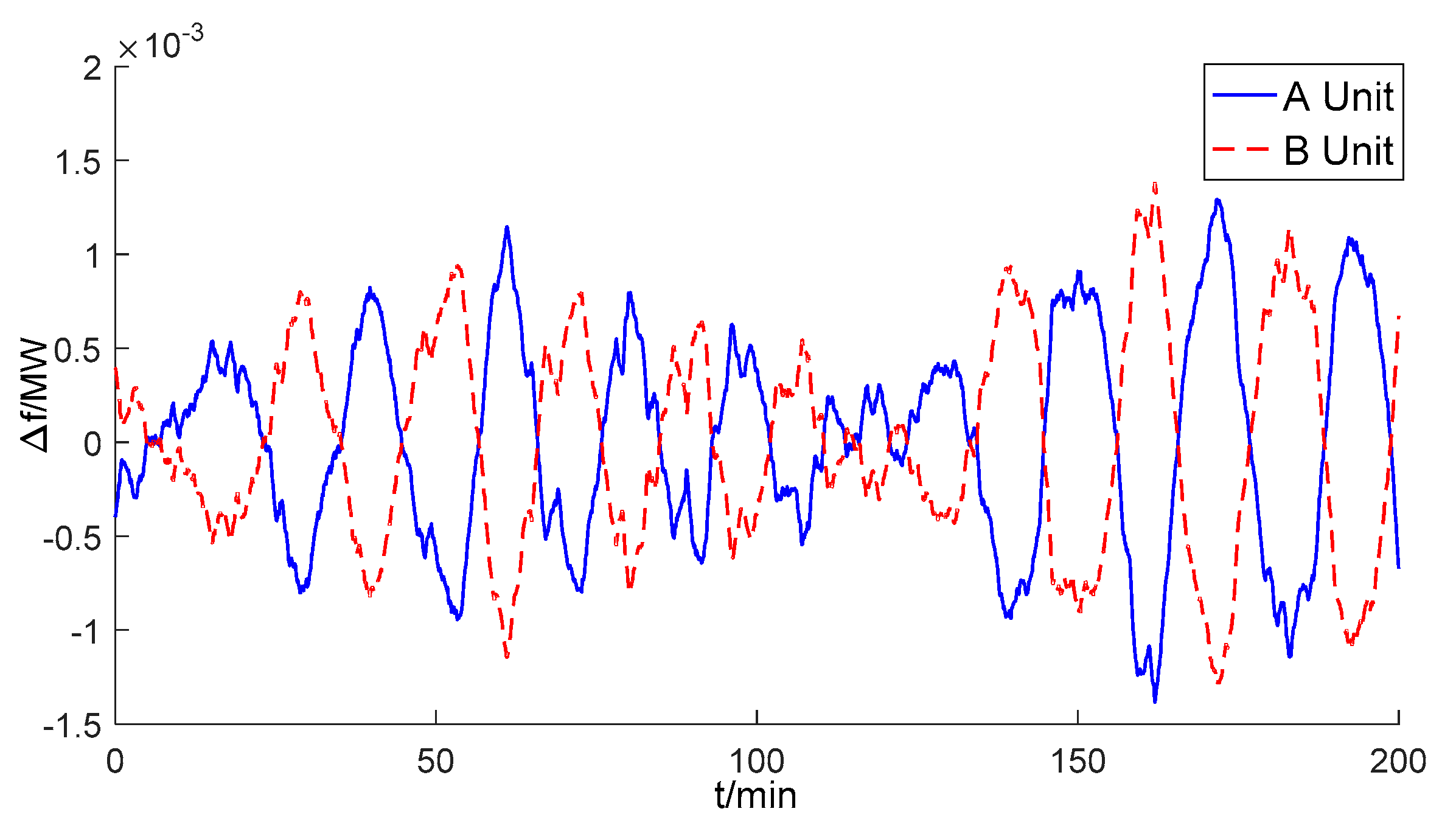
- By introducing a CPS performance evaluation index that combined regional frequency and unit frequency deviations in detail, a two-unit interconnected simulation environment was established. The control effects of the AGC system under generator side and tie line power disturbances were simulated and analyzed. Results showed that the impact of AGC intelligent predictive control met the relevant regulations on load, frequency, and CPS index. It also pointed out that the evaluation of AGC control performance according to CPS1 and CPS2 standards was more suitable for the requirements of current power grid control.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| inertia coefficient of the generator | weight vector | ||
| per unit value of system load regulation | likelihood function | ||
| actual power variation | distribution of samples | ||
| tie-line power deviation | normalization factor | ||
| frequency deviation | superparametric | ||
| actual frequency of the power grid | normalization factor | ||
| planned frequency of the power grid | superparametric | ||
| actual switching frequency | current time control value | ||
| planned exchange power | u(k + 1) | the future time control value | |
| frequency deviation coefficients of the power grid | current time output value | ||
| coordination factor | ym(k + 1) | prediction output value | |
| total frequency deviation coefficient | actual object output | ||
| ACE limit average in 10 min | feedback correction deviation | ||
| mean square root of mean frequency deviation in 1 min | error correction coefficient | ||
| mean square root of mean frequency deviation in 10 min | rolling neural network output | ||
| water supply flow | current time setpoint value | ||
| coal supply flow | |||
| steam turbine valve opening | |||
| temperature of the intermediate point | AGC | automatic generation control | |
| main steam pressure | CPS | control performance standard | |
| actual power | EMS | energy management system | |
| estimating parameter | CCS | coordinated control system | |
| sample information | TLBO | teaching learning based optimization | |
| prior distribution density function of | MPC | model predictive control | |
| posterior distribution density function of | NERC | north American electric reliability council | |
| density functions of | ACE | area control error | |
| density functions of | RTU | remote terminal unit | |
| weight matrix from the input layer to the first hidden layer | TBC | tie-line and frequency bias control | |
| weight matrix from the hidden layer to the output layer | DCS | distributed control system | |
| a prior probability distribution of weight vector | ZOH | zero-order holder | |
References
- Ismail, M.M.; Bendary, A.F. Load Frequency Control for Multi Area Smart Grid based on Advanced Control Techniques. Alex. Eng. J. 2018, 57, 4021–4032. [Google Scholar] [CrossRef]
- Hakimuddin, N.; Khosla, A.; Garg, J.K. Centralized and decentralized AGC schemes in 2-area interconnected power system considering multi source power plants in each area. J. King Saud Univ. Eng. Sci. 2018. [Google Scholar] [CrossRef]
- Kalavani, F.; Zamani-Gargari, M.; Mohammadi-Ivatloo, B.; Rasouli, M. A contemporary review of the applications of nature-inspired algorithms for optimal design of automatic generation control for multi-area power systems. Artif. Intell. Rev. 2017, 51, 187–218. [Google Scholar] [CrossRef]
- Singh, A.; Kumar, N.; Joshi, B.P.; Vaisla, K.S. AGC using adaptive optimal control approach in restructured power system. J. Intell. Fuzzy Syst. 2018, 35, 4953–4962. [Google Scholar] [CrossRef]
- Wang, J.; Pang, X.; Gao, S.; Zhao, Y.; Cui, S. Assessment of automatic generation control performance of power generation units based on amplitude changes. Int. J. Electr. Power Energy Syst. 2019, 108, 19–30. [Google Scholar] [CrossRef]
- Huang, T.; Satchidanandan, B.; Kumar, P.R.; Xie, L. An Online Detection Framework for Cyber Attacks on Automatic Generation Control. IEEE Trans. Power Syst. 2018, 33, 6816–6827. [Google Scholar] [CrossRef]
- Sharma, G.; Bansal, R.C. DFIG Based AGC of Power System Using Robust Methodology. Energy Procedia 2017, 105, 590–595. [Google Scholar] [CrossRef]
- Arya, Y. AGC of PV-thermal and hydro-thermal power systems using CES and a new multi-stage FPIDF-(1+PI) controller. Renew. Energy 2019, 134, 796–806. [Google Scholar] [CrossRef]
- Shankar, R.; Kumar, A.; Raj, U.; Chatterjee, K. Fruit fly algorithm-based automatic generation control of multiarea interconnected power system with FACTS and AC/DC links in deregulated power environment. Electr. Energy Syst. 2019, 29, e2690. [Google Scholar] [CrossRef]
- Rajesh, K.S.; Dash, S.S.; Rajagopal, R. Hybrid improved firefly-pattern search optimized fuzzy aided PID controller for automatic generation control of power systems with multi-type generations. Swarm Evolut. Comput. 2019, 44, 200–211. [Google Scholar] [CrossRef]
- Saboya, I.; Egido, I.; Lobato, E.; Sigrist, L. MOPSO-tuning of a threshold-based algorithm to start up and shut-down rapid-start units in AGC. Int. J. Electr. Power Energy Syst. 2019, 108, 153–161. [Google Scholar] [CrossRef]
- Nanda, J.; Mishra, S.; Saikia, L.C. Maiden application of bacterial foraging based optimization technique in multi-area automatic generation control. IEEE Trans. Power Syst. 2009, 24, 602–609. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M.C. Automatic generation control application with craziness based particle swarm optimization in a thermal power system. Electr. Power Energy Syst. 2011, 33, 8–16. [Google Scholar] [CrossRef]
- Sahu, R.K.; Gorripotu, T.S.; Panda, S. Automatic generation control of multi-area power systems withdiverse energy sources using Teaching Learning BasedOptimization algorithm. Eng. Sci. Technol. Int. J. 2016, 19, 113–134. [Google Scholar] [CrossRef]
- Tao, J.; Ma, L.; Zhu, Y. Improved control using extended non-minimal state space MPC and modified LQR for a kind of nonlinear systems. ISA Trans. 2016, 65, 319–326. [Google Scholar] [CrossRef]
- Dai, L.; Xia, Y.; Gao, Y.; Cannon, M. Distributed stochastic MPC of linear systems with additive uncertainty and coupled probabilistic constraints. IEEE Trans. Automat. Control 2017, 62, 3474–3481. [Google Scholar] [CrossRef]
- Zhang, S.; Mao, W. Optimal operation of coal conveying systems assembled with crushers using model predictive control methodology. Appl. Energy 2017, 198, 65–76. [Google Scholar] [CrossRef]
- Hou, G.; Gong, L.; Huang, C.; Zhang, J. Novel fuzzy modeling and energy-saving predictive control of coordinated control system in 1000 MW ultra-supercritical unit. ISA Trans. 2019, 86, 48–61. [Google Scholar] [CrossRef]
- Hou, G.; Du, H.; Yang, Y.; Huang, C.; Zhang, J. Coordinated control system modelling of ultra- supercritical unit based on a new TS fuzzy structure. ISA Trans. 2018, 74, 120–133. [Google Scholar] [CrossRef]
- Zhao, D.; Xu, L.; Huangfu, Y.; Dou, M.; Liu, J. Semi-physical modeling and control of a centrifugal compressor for the air feeding of a PEM fuel cell. Energy Convers. Manag. 2017, 154, 380–386. [Google Scholar] [CrossRef]
- Kuo, C.F.J.; Lee, Y.W.; Umar, M.L.; Yang, P.C. Dynamic modeling, practical verification and energy benefit analysis of a photovoltaic and thermal composite module system. Energy Convers. Manag. 2017, 154, 470–481. [Google Scholar]
- Sreepradha, C.; Panda, R.C.; Bhuvaneswari, N.S. Mathematical model for integrated coal fired thermal boiler using physical laws. Energy 2017, 118, 985–998. [Google Scholar] [CrossRef]
- Zhai, L.; Xu, G.; Wen, J.; Quan, Y.; Fu, J.; Wu, H.; Wu, H.; Li, T. An improved modeling for low-grade organic Rankine cycle coupled with optimization design of radialinflow turbine. Energy Convers. Manag. 2017, 153, 60–70. [Google Scholar] [CrossRef]
- Benyounes, A.; Hafaifa, A.; Guemana, M. Gas turbine modeling based on fuzzy clustering algorithm using experimental data. Appl. Artif. Intell. 2016, 30, 29–51. [Google Scholar] [CrossRef]
- Wu, X.; Shen, J.; Li, Y.; Lee, K.Y. Fuzzy modeling and stable model predictive tracking control of large-scale power plants. J. Process Control 2014, 24, 1609–1626. [Google Scholar] [CrossRef]
- Ahmed, F.; Cho, H.J.; Jin, K.K.; Seong, N.U.; Yeo, Y.K. A real-time model based on least squares support vector machines and output bias update for the prediction of NOx emission from coal-fired power plant. Korean J. Chem. Eng. 2015, 32, 1029–1036. [Google Scholar] [CrossRef]
- Pogorelov, G.I.; Kulikov, G.G.; Abdulnagimov, A.I.; Badamshin, B.I. Application of neural network technology and high-performance computing for identification and real-time hardware-in-the-loop simulation of gas turbine engines. Procedia Eng. 2017, 176, 402–408. [Google Scholar] [CrossRef]
- Oko, E.; Wang, M.; Zhang, J. Neural network approach for predicting drum pressure and level in coal-fired subcritical power plant. Fuel 2015, 151, 139–145. [Google Scholar] [CrossRef]
- Singh, R.; Manitsas, E.; Pal, B.C. A Recursive Bayesian Approach for Identificationof Network Configuration Changes in Distribution System State Estimation. IEEE Trans. Power Syst. 2010, 25, 1329–1337. [Google Scholar] [CrossRef]
- Liu, X.J.; Zhang, J.W. CPS Compliant Fuzzy Neural Network Load Frequency Control. In Proceedings of the 2009 American Control Conference, St. Louis, MO, USA, 10–12 June 2009. [Google Scholar]
- Shiltz, D.J.; Baros, S.; Cvetkovi´c, M.; Annaswamy, A.M. Integration of Automatic Generation Control and Demand Response via a Dynamic Regulation Market Mechanism. IEEE Trans. Control Syst. 2018, 27, 6816–6827. [Google Scholar] [CrossRef]
- Ismail, C.; Kumar, R.S.; Sindhu, T.K. Optimal fractional order PID controller for automatic generation control of two-area power systems. Int. Trans. Electr. Energy Syst. 2015, 25, 3329–3348. [Google Scholar] [CrossRef]
- Singh, V.P.; Samuel, P.; Kishor, N. Impact of demand response for frequency regulation in two-area thermal power system. Int. Trans. Electr. Energy Syst. 2017, 27, e2246. [Google Scholar] [CrossRef]
- Raju, M.; Saikia, L.C.; Sinha, N. Automatic generation control of a multi-area system using ant lion optimizer algorithnm based PID plus second order derivative controller. Electr. Power Energy Syst. 2016, 80, 52–63. [Google Scholar] [CrossRef]
- Rimal, A.N.; Belkacemi, R. CPS compliant adaptive immune based load frequency control with varying wind penetrations. In Proceedings of the 2016 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference (ISGT), Minneapolis, MN, USA, 6–9 September 2016; pp. 1–5. [Google Scholar]
- Pappachen, A.; Fathima, A.P. NERC’s control performance standards based load frequency controller for a multi area deregulated power system with ANFIS approach. Ain Shams Eng. J. 2018, 9, 2399–2414. [Google Scholar] [CrossRef]
- Saikia, L.C.; Sahu, S.K. Automatic generation control of a combined cycle gas turbine plant with classical controllers using firely algorithnm. Electr. Power Energy Syst. 2013, 53, 27–33. [Google Scholar] [CrossRef]
- Zavala, V.M. A Multi objective Optimization Perspective on the Stability of Economic MPC. IFAC-Papers OnLine 2015, 48, 974–980. [Google Scholar] [CrossRef]
- Xing, X.; Xie, L.; Meng, H. Cooperative energy management optimization based on distributed MPC in grid-connected microgrids community. Int. J. Electr. Power Energy Syst. 2019, 107, 186–199. [Google Scholar] [CrossRef]
- Terzi, E.; Cataldo, A.; Lorusso, P.; Scattolini, R. Modelling and predictive control of a recirculating cooling water system for an industrial plant. J. Process Control 2018, 68, 205–217. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
| K | K-Fold Cross-Validation Error | Accuracy Rate |
|---|---|---|
| 1 | 0.0210 | 97.1% |
| 2 | 0.1453 | 96.3% |
| 3 | 0.0921 | 98.0% |
| 4 | 0.0782 | 97.8% |
| mean value | 0.0841 | 97.3% |
|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, D.; Xu, Y.; Zhao, H. Research on Intelligent Predictive AGC of a Thermal Power Unit Based on Control Performance Standards. Energies 2019, 12, 4073. https://doi.org/10.3390/en12214073
Peng D, Xu Y, Zhao H. Research on Intelligent Predictive AGC of a Thermal Power Unit Based on Control Performance Standards. Energies. 2019; 12(21):4073. https://doi.org/10.3390/en12214073
Chicago/Turabian StylePeng, Daogang, Yue Xu, and Huirong Zhao. 2019. "Research on Intelligent Predictive AGC of a Thermal Power Unit Based on Control Performance Standards" Energies 12, no. 21: 4073. https://doi.org/10.3390/en12214073
APA StylePeng, D., Xu, Y., & Zhao, H. (2019). Research on Intelligent Predictive AGC of a Thermal Power Unit Based on Control Performance Standards. Energies, 12(21), 4073. https://doi.org/10.3390/en12214073