1. Introduction
Climate change and environmental concerns stimulate the development of the concept of distributed energy resources (DERs) and their subsequent widespread application in power systems across the world [
1]. DERs have the advantages of economy, efficiency and reliability; however, the integration of a large number of small- and ultra-small-sized, geographically dispersed and heterogeneous DERs has a greater impact on the power grid and presents austere challenges to the network operator in controlling and managing the whole system [
2]. One of the proposed solutions is the concept of a microgrid (MG), driven by recent advances in both modern communication and intelligent computation technologies [
3,
4].
Economic dispatching (ED) is also one of the most fundamental issues of an MG, where the total required generation is distributed among the generators in operation by minimizing the selected cost criterion, subject to load demand and generator capacity constraints [
5]. Traditionally, solution algorithms for the ED problem of MGs have been centralized in nature, wherein a powerful central computer is employed to make a decision on the power commitment for each power generation unit by solving a specific form of optimization problem, according to the information collected via communication links deployed between the central computer and each generation unit [
6]. As pointed out in [
7], the design of intelligent economic dispatching strategies for microgrids is drastically different to that of conventional central grids due to two unique challenges. Firstly, the demand and renewable generation uncertainty emphasizes the need for online algorithms. Secondly, the widely adopted peak-based pricing scheme results in the need for new peak-aware strategy design. Therefore, artificial-intelligence-based approaches such as particle swarm and simulated annealing algorithms have also been applied in order to optimally allocate the power of different types of generators and energy storage units [
8,
9]. These approaches are still unable to tackle the difficulties inherent to the solving of the ED problem in a centralized framework. These problems include the fact that the dispatching center is usually associated with a heavy computation and communication burden, the overall dispatching system is very fragile with one-point failure of the central computer, and more importantly, that the whole system needs to be reconstructed for the adding and/or leaving of a power generator [
10].
The transition of power generation and distribution in a power grid to become increasingly decentralized stimulates the development of distributed control systems that are efficient in handling dynamic loads, robust against transmission and generation failure and allow for plug-and-play of DERs [
11,
12]. The majority of them rely on consistency or distributed optimization algorithms that have been extensively studied and applied in various engineering fields, such as distributed sensor networks [
13], unmanned aerial vehicle formation [
14] and robot cooperative control [
15].
Consequently, there has been considerable interest in developing distributed strategies for the solution to the ED problem of MGs [
16,
17]. The predominant approach is to consider quadratic cost functions for generators and perform consensus over their incremental costs under local communication topologies [
18]. The basic idea and implementation method of a leader–follower type distributed ED algorithm has been presented in [
19,
20]. The leader performed the so-called pinning control according to the power mismatch of the system and the optimal power allocation was obtained when the incremental costs of all the units were equal. However, the power mismatch between total load and total power generation is global information that is very difficult to obtain by the leader locally in a distributed framework. Although the knowledge of power mismatch was no longer needed, the distributed ED algorithm proposed in [
21] assumed that the leader had access to the information on the total load demand, which is, however, also a type of global information. Alternatively, in a leaderless version of the distributed ED strategy [
22], each power generation unit adjusted its output based on the feedback on the power mismatch estimated locally by the generation unit itself. This algorithm should be initialized with a feasible power allocation. In [
23], the authors proposed a finite-time convergence distributed ED strategy with the aim to speed-up the iteration process, but its implementation required placing an agent on each bus integrated with a load or a power generator. Network transmission power loss is also an important factor affecting the ED solution. Transmission power loss was handled in the strategy proposed in [
24] on the premise that each generator can estimate the power loss in the transmission lines adjacent to it. In a centralized framework, power loss can be roughly estimated or accurately calculated based on power flow analysis by the dispatching center. However, it is scarcely possible for a power generation unit itself to accurately estimate power loss that is time-variant, network operation-dependent and distributed all over the network, even with the help of a sophisticated distributed algorithm.
This paper presents a novel leader–follower type distributed ED planning for an MG, to tackle the difficulties of existing distributed ED algorithms in modeling network power loss and providing global information. The major innovations of this paper are as follows: (1) We developed a novel leader–follower type distributed ED framework which treats the external power grid as a special power unit called a ‘virtual power generator’, that is ‘dispatched’ by the MG operator. This particular design greatly facilitates the synthesis of our distributed information exchange protocol in a unified manner, and the local information of power mismatching and exchanged power instruction can be shared with other power units in accordance with the rule of the consensus protocol. The participation of the virtual power generator has no effect on the economic dispatching solution at all. (2) A fully distributed leader–follower ED model has been established. It only requires the leader to access the information of power mismatching and exchanged power instruction locally, thus avoiding the complexity in obtaining global information. In addition, network power loss can also be treated conveniently and modeled simply in the model formulation. To our best knowledge, this model is the first full version of a quadratic cost function-type distributed ED model. (3) We developed a distributed sub-gradient-based method in order to solve the built ED model, and to provide the strict proof to investigate the convergence of this method for the first time.
The remainder of this paper is structured as follows: in
Section 2, the framework of our distributed economic dispatch system based on the concept of a virtual power generator is described. The real-time distributed economic dispatch model and its subgradient-based optimal solution are presented in
Section 3.
Section 4 investigates the convergence of the distributed economic dispatch system. Simulation results under several scenarios are provided in
Section 5 to show the effectiveness of the proposed strategy. Finally, in
Section 6, the main findings of the paper are summarized.
2. Distributed ED Framework of an MG
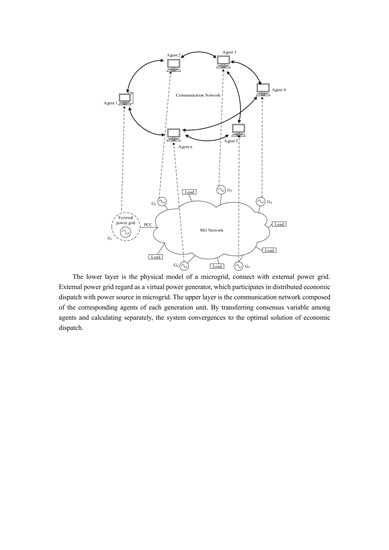
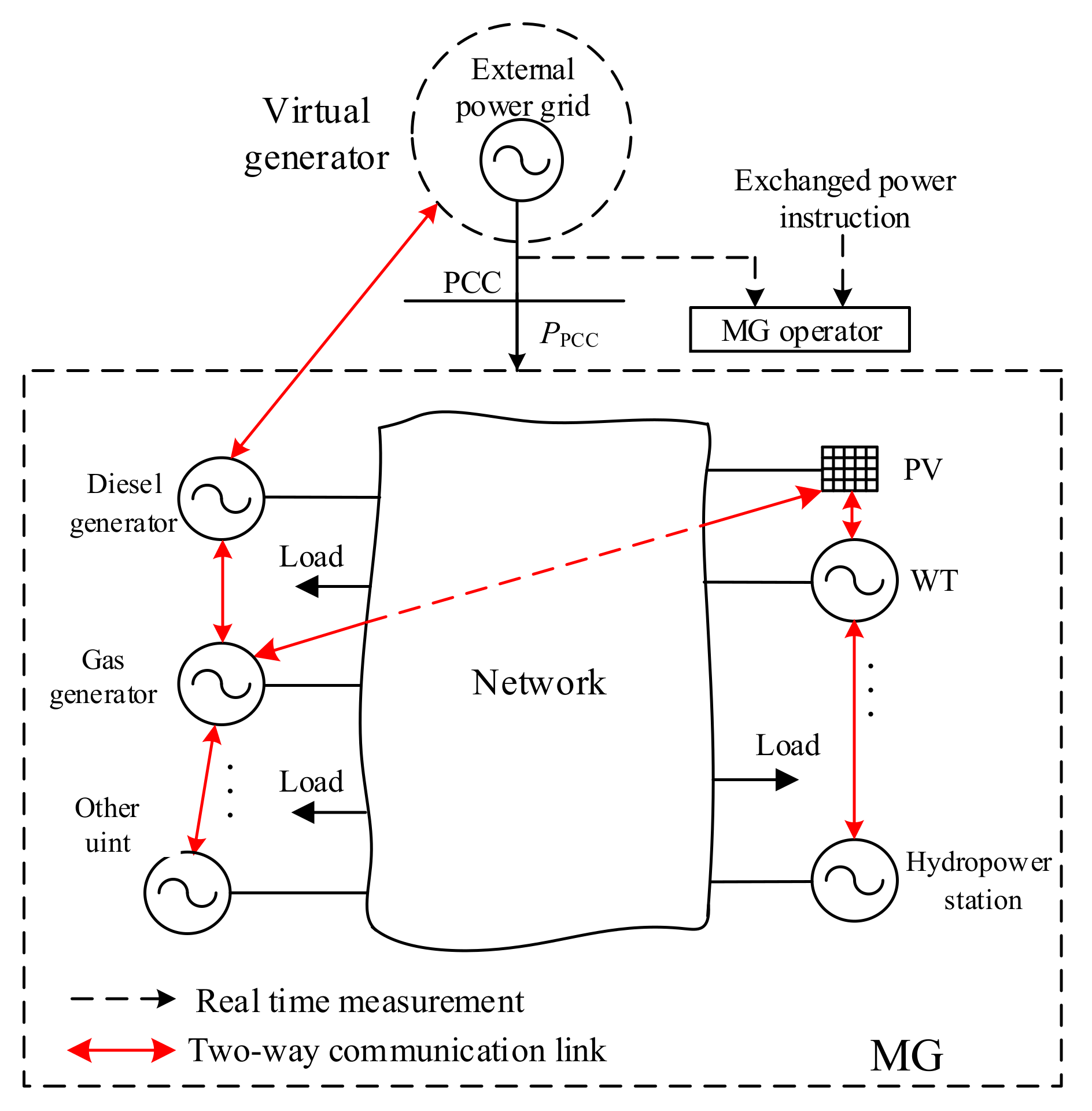
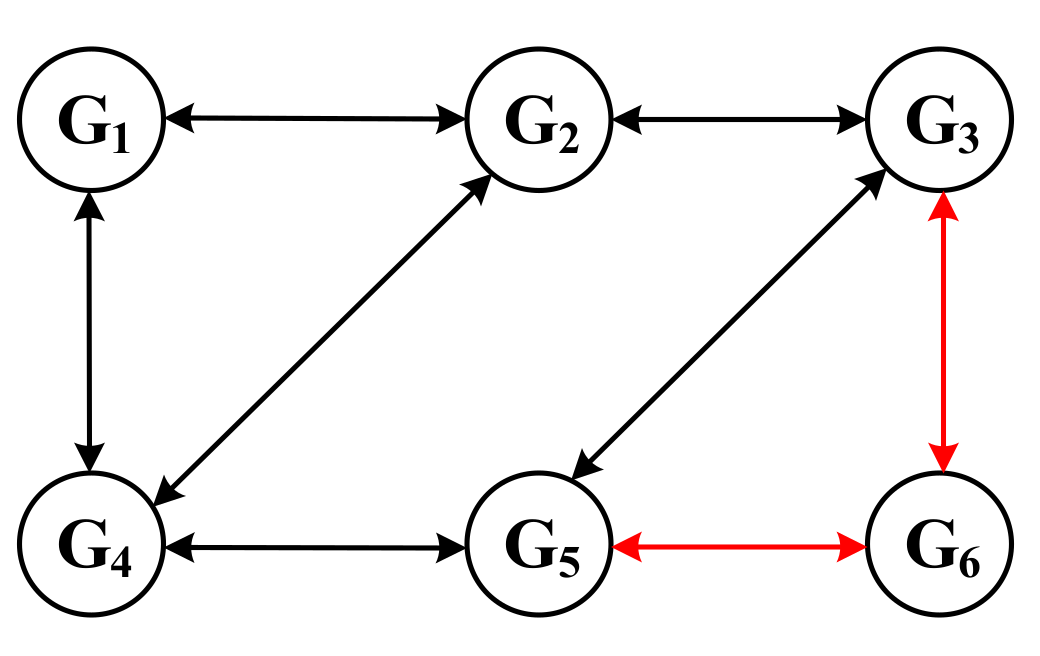
Figure 1 shows the general structure of an MG. It is normally integrated with several fossil fuel-based generators, gas turbo-generators and heterogeneous distributed renewable resources, such as photovoltaics (PV), wind-turbine (WT) power and small-scale hydro-turbine generators. The goal of economic dispatch is to minimize the total power generation cost in scheduling all the power sources to balance the load demand in the MG and to satisfy the requirements of the power exchange between the MG and the external power grid. The instruction for the exchange of power may be issued directly from a system operator in a higher level of the hierarchical control system or the commitment can be made by the MG locally when participating in electricity market trading.
In a distributed economic dispatch scheme, the central scheduler is replaced by a collection of the local controllers of each generation unit, and the communication network between local controllers can be of arbitrary topology, as long as the topological graph is connected. The solution to a distributed ED problem involves an iteration process. In an iteration circle, each generation unit makes a decision regarding its power generation autonomously, by synthesizing the status of itself and the information of its neighbors, which is received via two-way communication links (the red arrowhead lines shown in
Figure 1). The economic dispatch goal of the MG can be achieved once the iteration computation process reaches convergence.
To completely tackle the difficulty of existing distributed ED algorithms in collecting global information and effectively consider the power exchanging requirement in the dispatch process, we introduced a novel scheme wherein the external grid to which the MG connects is regarded as a special power generation unit called a ‘virtual power generator’. Here, ‘virtual’ means that this generator is in fact a non-schedulable unit and just participates in the iteration computation process. This is in order to provide the real-time information on the mismatch between the exchanged power PPCC and its instruction Pref, in a way conforming to the rule of the consensus-based protocol that only consensus variables can be transmitted. In this sense, this virtual power generator is always ‘controlled and dispatched’ by the MG operator due to fact that the operator can measure the exchanged power PPCC more conveniently and is the specific person to receive or generate the instruction of the exchanged power.
3. Distributed ED Model and Optimization Solution
3.1. Distributed Economic Dispatch Model
A regular centralized ED model of an MG can be formulated as:
where
n is the number of power source units participating in the economic dispatch;
PG,i and
Fi(
PG,i) is the power and cost function of unit
i, respectively;
and
is, respectively, the power lower and upper limit of unit
i;
PD is the total load demand of the MG,
PLOSS is the network power loss and
Pref is the order of the power exchanged between the MG and the external grid.
The cost function
Fi(
PG,i) of the real power source unit
i is usually expressed as a quadratic function of its power
PG,i, that is:
where
ai,
bi and
ci are the corresponding coefficients.
Using the classical Lagrange multiplier method, the optimal model (1) with an equality constraint can be converted into:
where
λ is Lagrange multiplier and:
For constant network power loss and convex cost-power functions, the optimal solution
P*G = [
PG,1,
P G,2, …,
PG,n] and
λ* of Formula (3) is unique and can be characterized by:
Derivation dFi(PG,i)/PG,i is also termed as the incremental cost of unit i. The ED model (3) can be solved conveniently in a centralized mode, provided that all the cost functions Fi(PG,i), total load demand PD, power loss PLOSS and power order Pref are foreknown by the central scheduler.
We introduced a virtual generator with the sequence number ‘1’ to decompose the centralized ED mode (1). The local ED model of each real generator and the virtual generator can be uniformly formulated as:
where
di is used to identify the virtual power generator, i.e.,
d1 = 1 and
di = 0 for
i = 2,3,…,
n in this paper.
We simply set the cost function
F1(
PG,1) = 0 and the power limit
and
for the virtual power generator. According to the introduction of the virtual generator in
Section 2, we can know that its power
PG,1 equals the power exchanged between MG and the external grid, i.e.,
PG,1 =
PPCC.
In accordance with the centralized ED model (1), function
fp in (6) is defined as follows:
In real operation, we can know that:
Thus, Formula (7) can be reformed as the following:
We can learn by investigating Formulas (6)–(9) that: (1) The sum of the local model (6) for n power units (including the virtual power generator) collectively equals the central ED model (1); (2) Since di = 0 when i = 2,3,…,n, model (6) can be built by a real power source unit itself locally and independently. As for the virtual generator, it only needs the information on the real-time exchanged power PPCC and the power order Pref that can be provided by the MG operator conveniently to calculate the function fp in its local model (6). Therefore, the ED model (6) for n power units is fully distributed in nature. (3) Global information such as total load PD and the sum of the power of all the generators or the power mismatch that are bottlenecks of current distributed ED strategies are no longer needed in developing our ED model (6). Furthermore, global operation information regarding power loss PLOSS that is very difficult to be calculated or estimated accurately can now be handled simply and conveniently.
3.2. Sub-Gradient-Based Optimization Method
The n power source units and the communication links between them can be collectively regarded as a multi-agent system. Their interaction topology is represented using an undirected weighting graph G = (V, E, A) with the set of nodes V = {1,…,n}, edges E ⊆ V × V and an adjacency matrix A.
We took the incremental cost of a power generator as the consensus variable in order to develop the solution method for our distributed ED model (6). The discrete form of the protocol used by power generator
i to update its status in the
k-th iteration can be formulated as the following:
where
k is the iteration number and
λi is the incremental cost of unit
i;
δ is the step-size; coefficient
aij, which is the weighting assigned by unit
i for the information received from unit
j. In equal weighting scheme,
aij is chosen as follows:
where
Ni = {
j ∈
V:(
i,
j) ∈
E} is the set of neighbors of agent
i, and edge (
i,
j) ∈
E if agent
i can communicate with agent
j; |
Ni| denotes the number of neighbors of agent
i;
ε ∈ (0,
dmax) and
dmax is the maximum degree of graph
G.
Positive step-size
δ plays an important role in determining the performance of a distributed algorithm in terms of convergence speed and optimization accuracy. Although it is possible to drive the errors between the decision variables and their optimal values to zero using, e.g., a diminishing step size rule [
25], we prefer a constant step-size rule in view of its simplicity and relatively fewer number of iterations.
Based on the principle of sub-gradient distributed optimization method, if we tune Δ
fP[
k] as the negative partial differential of
fP at
λ0[
k] in the
kth iteration cycle, and we can obtain the following:
The power order of the
i-th (
i = 1,2,…,
n) real power source unit after the
k-th iteration is determined as follows:
Considering the power limits, the final power order of unit
i is the following:
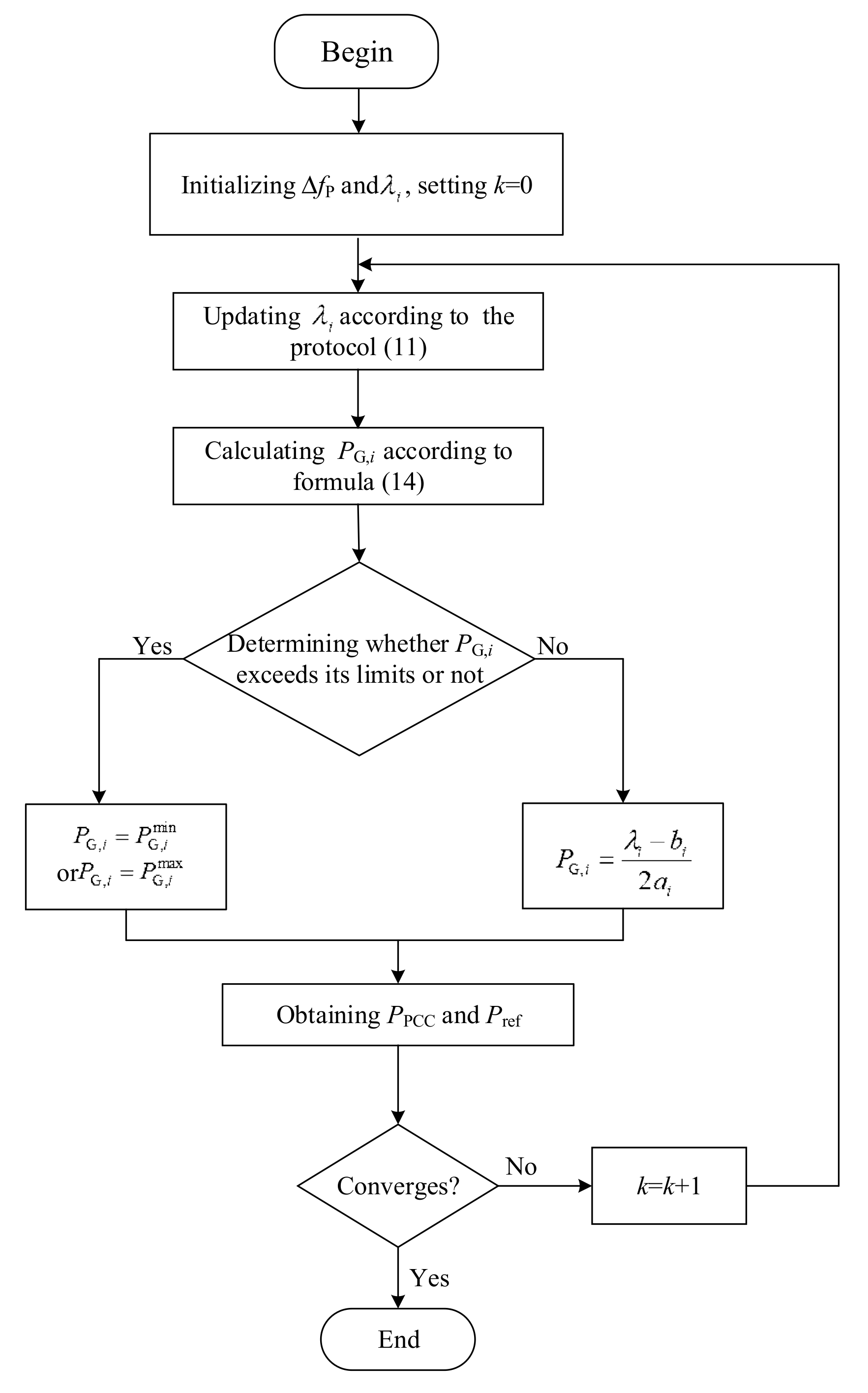
Figure 2 shows the flow chart of our distributed ED strategy.
We can learn from the definition of di that ΔfP is computed locally only by the virtual generator according to the measured exchanged power PPCC and the instruction Pref. More importantly, the introduction of the virtual generator is very helpful in formulating the distributed protocol (10) to share the information of PPCC and Pref with all the other participants in accordance with the requirement of a distributed system that only the consensus variable can be transmitted.
4. Convergence Analysis of the Distributed ED System
From Formula (12), we can know that Δ
fP[
k] is indeed the negative sub-gradient of function
fP (9) at
λ0[
k]. Thus, our protocol (10) can be regarded as a special version of that proposed in [
26] (see Formula (3) therein). Reference [
26] has proven that the distributed computing method can obtain the same optimal solution as that derived by the centralized Lagrange multiplier method. The optimal solution can be solved from Formula (5) as follows:
Let
λ* to be the control target of the ED system, Formula (10) can be reformed as follows:
The collective dynamics of a group of
n agents can be synthesized as follows:
where
A ∈ R
n×n is the system information weighting matrix and its elements are defined by Formula (11).
, and
is called the virtual power generator identify vector.
We define the system state error vector at the
k-th iteration cycle as follows:
The evolution of the system state error can be derived according to Formula (17) as follows:
The following lemma is needed [
27] to analyze the convergence property of the system (17) [
28]:
Lemma 1. IfA ∈ Mm×n, then ρ(A) is an eigenvalue of A and there is a nonnegative vector x ≥ 0, x ≠ 0, such that Ax = ρ(A)x.
Theorem 1. Consider a multi-agent system with the dynamic of (17) and with an undirected connected communication topology. If δ ∈ (0, 1/(
dmax + 1))
, then the spectral radius of the matrixis less than 1. Proof. Let v = [v1,…,vn]T be the left eigenvector of Af corresponding to the spectral eigenvalue ρ(Af). Lemma 1 shows that v ≥ 0, v ≠ 0. Let vq = maxj = 1,2,…,n(vj). Thus, vq > 0.
That is to say: ρ(Af) < 1 when q = 1.
Thus,
ρ(
Af) ≤ 1. However, if
ρ(
Af) = 1, then
v = [
vq,..,
vq]
T as matrix
A of a connected graph is irreducible. It is impossible since
Thus, ρ(Af) < 1. □
By Theorem 1, we know that the spectral radius of Af is less than 1. Thus, the system state error as k→∞, which means that all the agents’ state converge to the control target λ*.
6. Conclusions
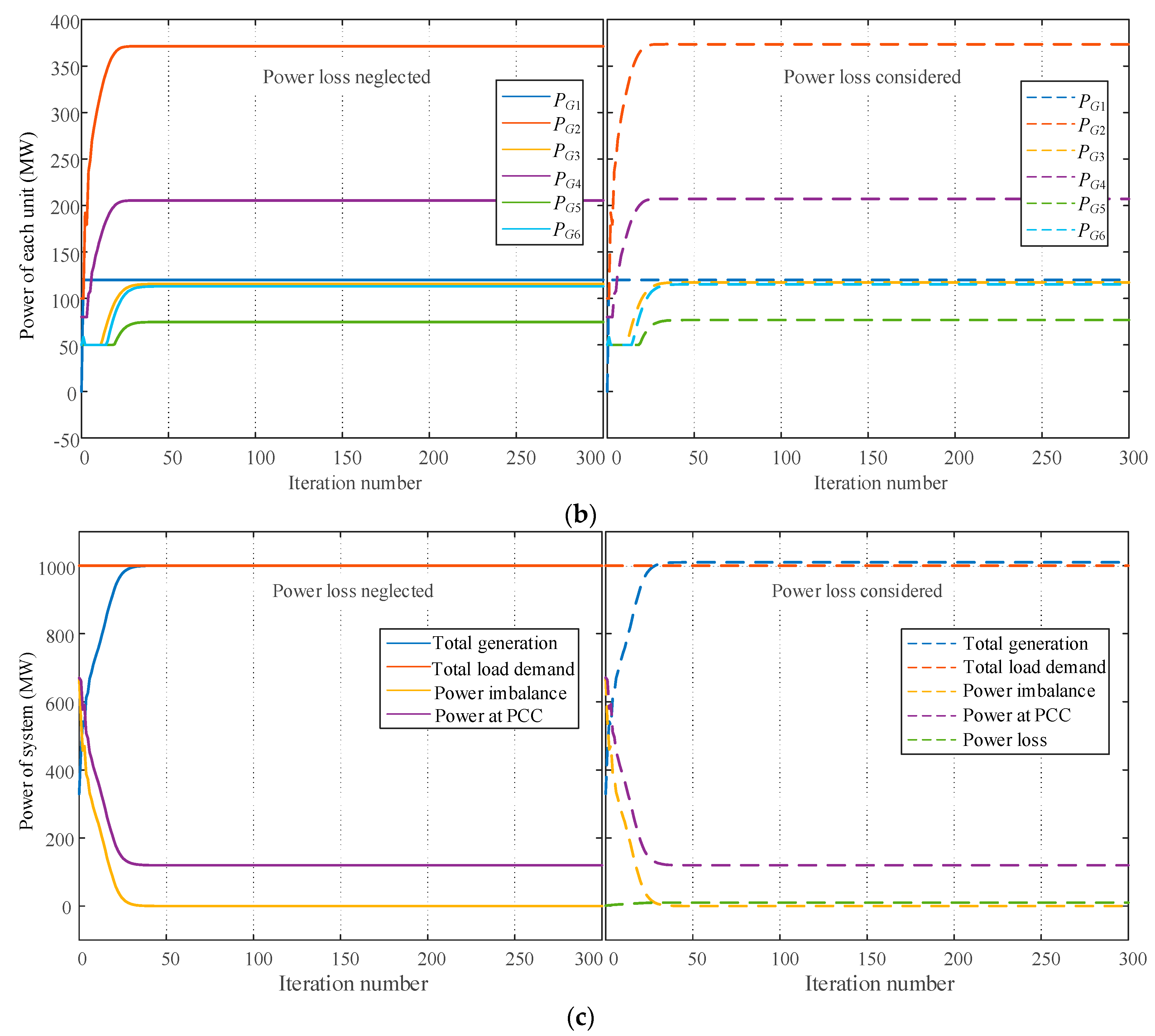
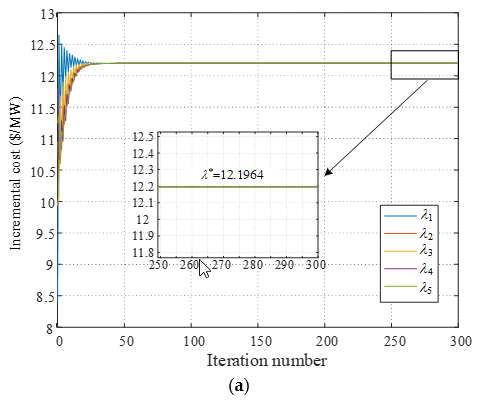
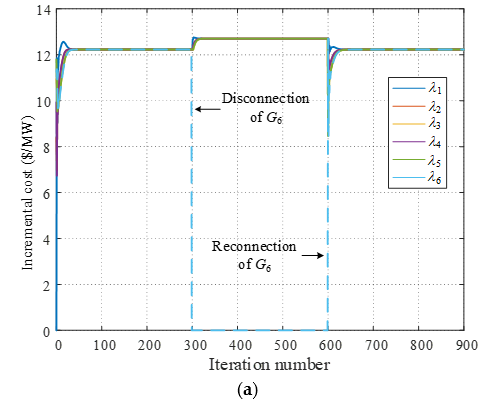
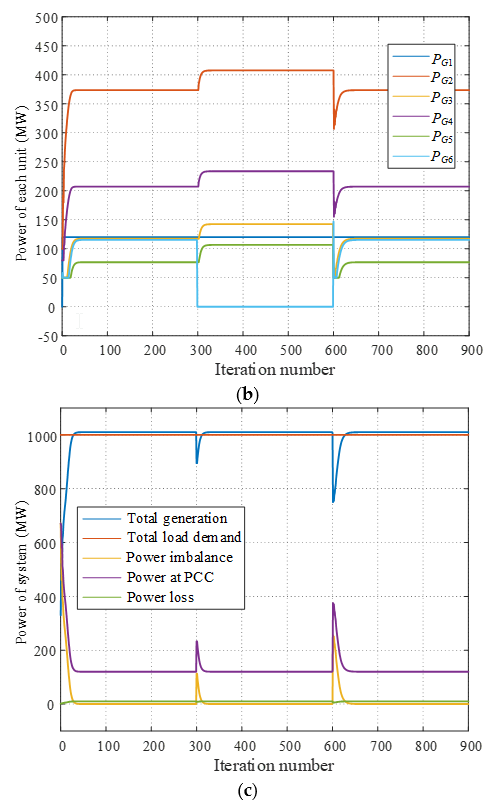
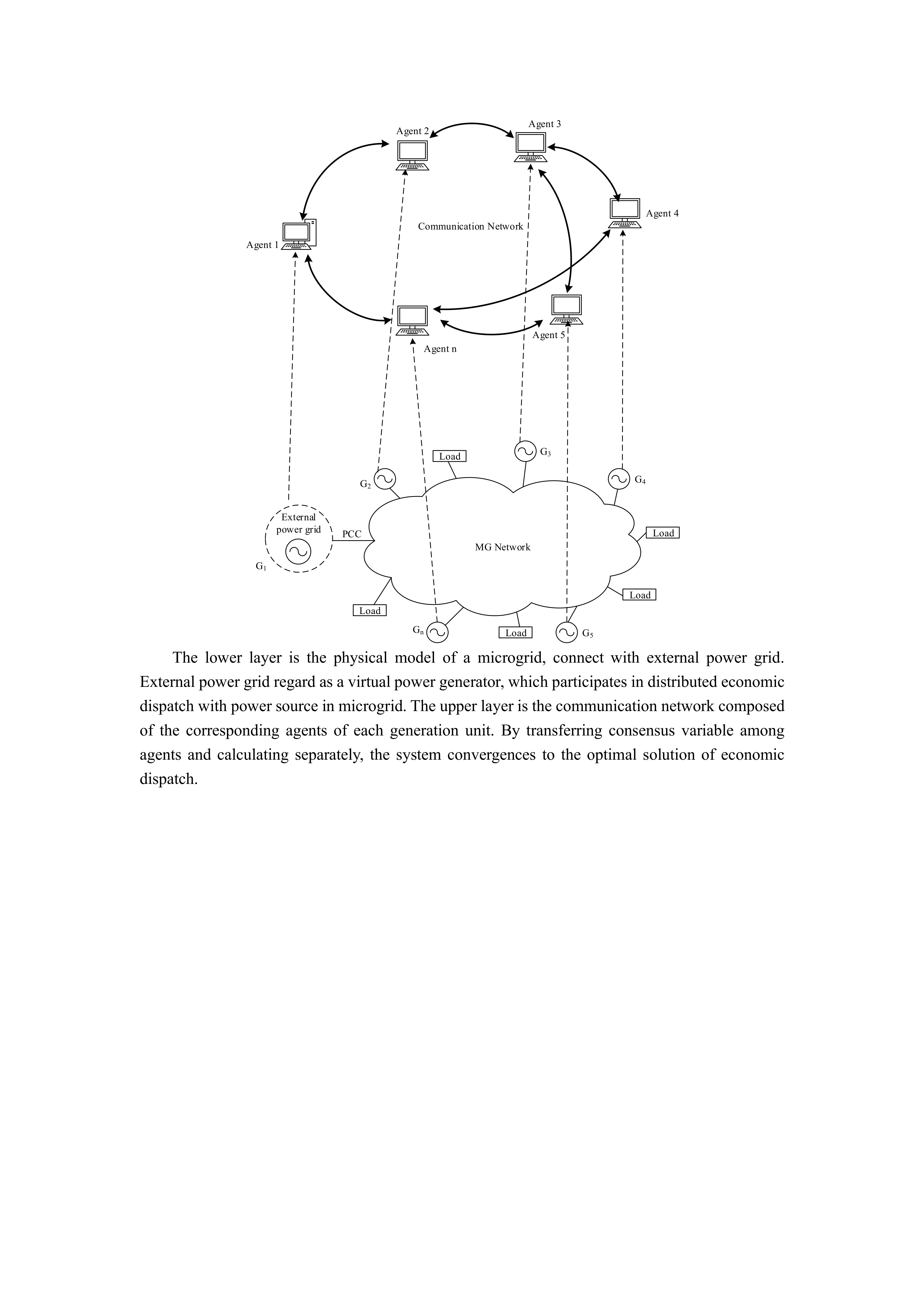
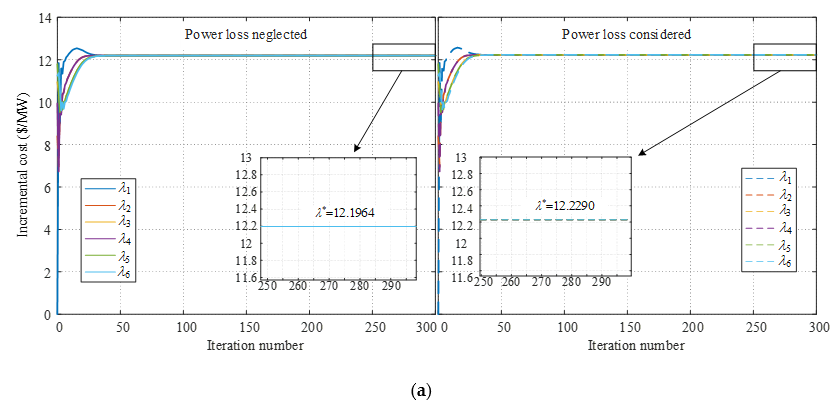
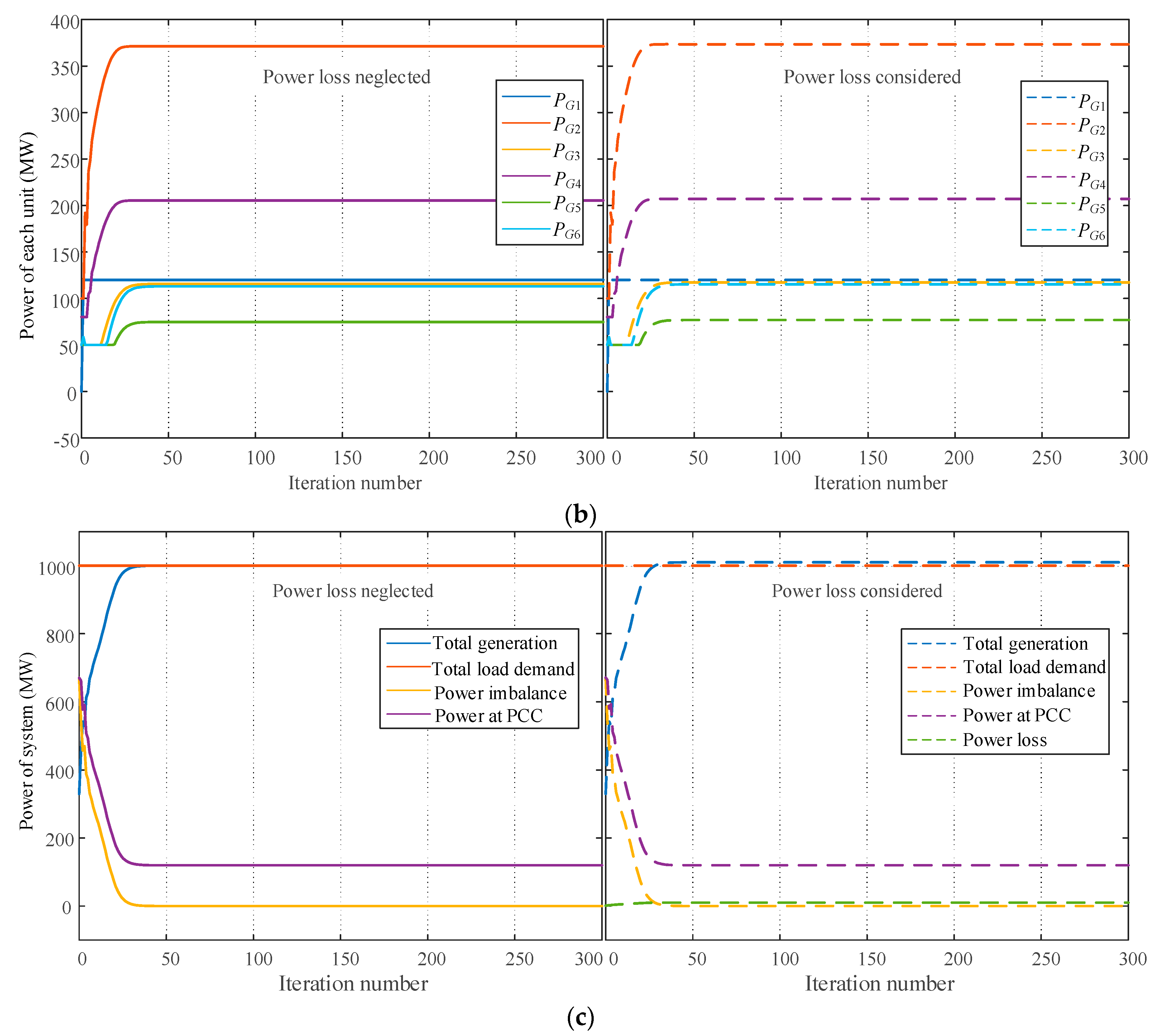
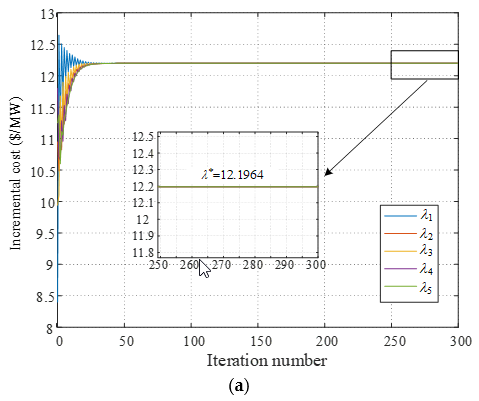
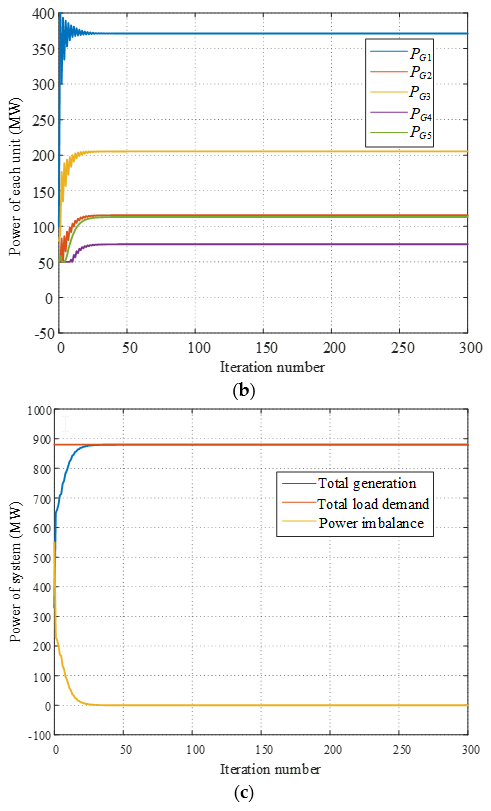
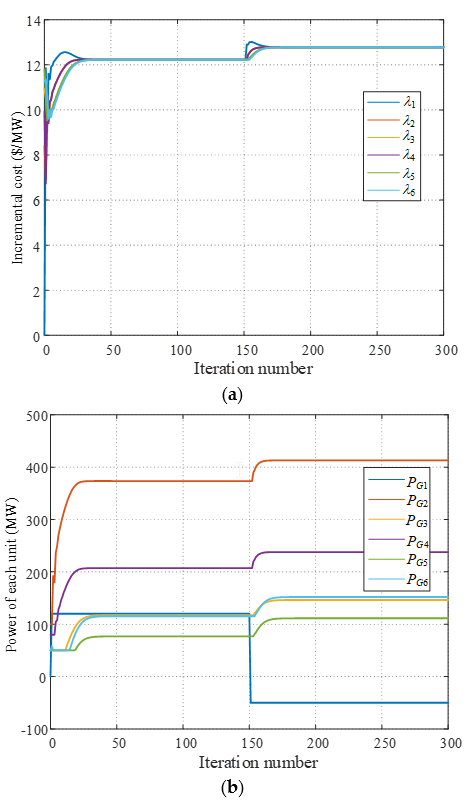
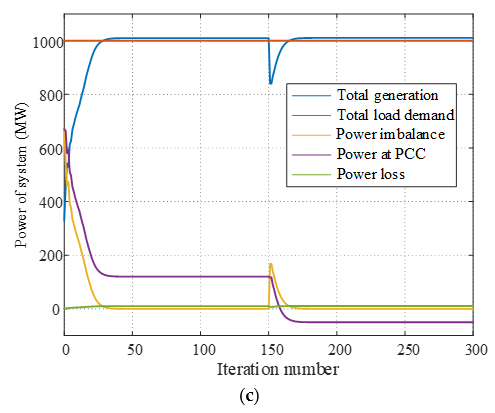
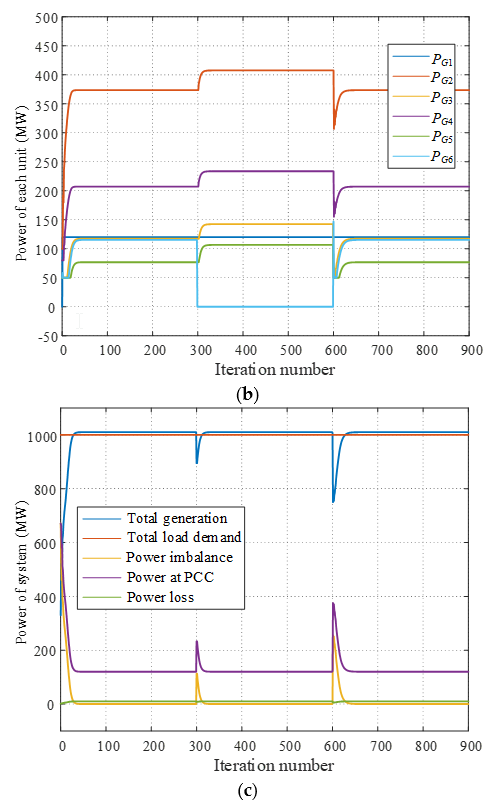
Based on the principle of consensus theory and distributed sub-gradient optimization, this paper proposes a real-time strategy that can fulfill the task of the economic dispatch of MGs in a fully distributed fashion. The external power grid to which the MG connects is treated as a special power source called a virtual generator and participates in the ED process. Only the power exchanged between the external power grid and the MG should be measured and utilized locally by the virtual generator, and only the consensus variable, i.e., incremental cost, should be shared between power generation units and the virtual generator. In this way, a fully distributed dispatch system is achieved, and more importantly, troublesome issues such as the need of global information regarding the total load demand and network power loss can be tackled easily and completely.
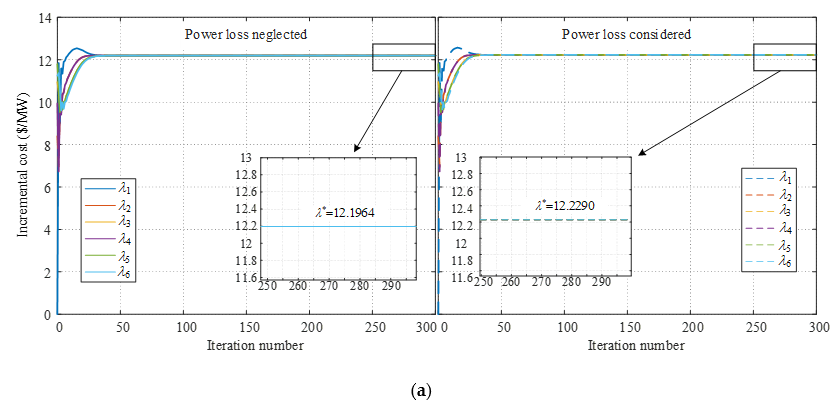
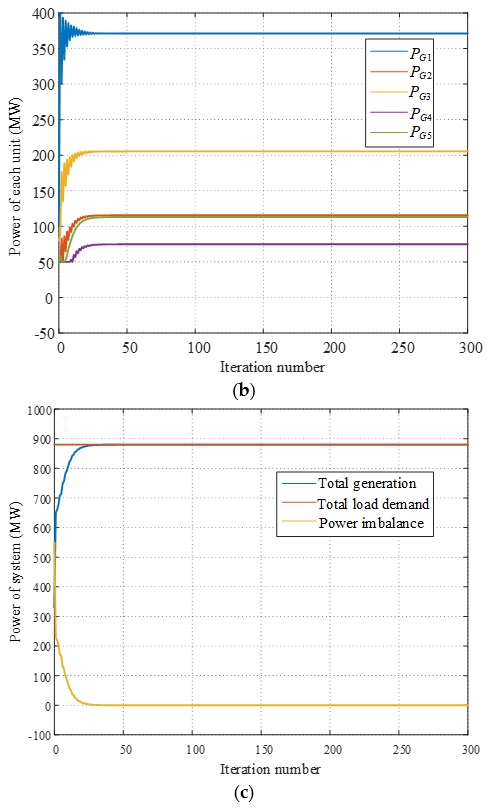
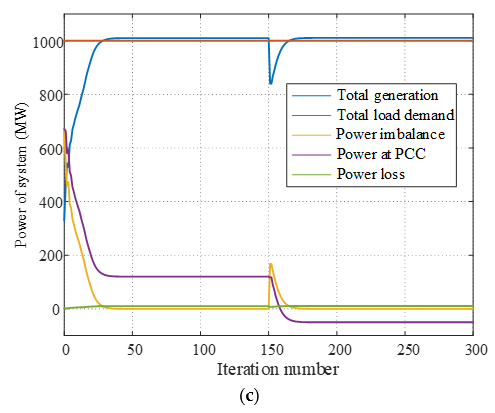
Simulation results under several scenarios verify the effectiveness of the proposed strategy, and it has good robustness and stability for power volatility and exchanged power instruction variations, and the power unit plug-and-play. In comparison with the current distributed economic dispatch methods, the proposed strategy is a fully distributed version and is very simple to implement because it is insensitive to initial power settings and does not require any global information. In addition, it has a higher power dispatch accuracy due to the capability of network power loss handling.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}