4.1. Model of Wind-Turbine System
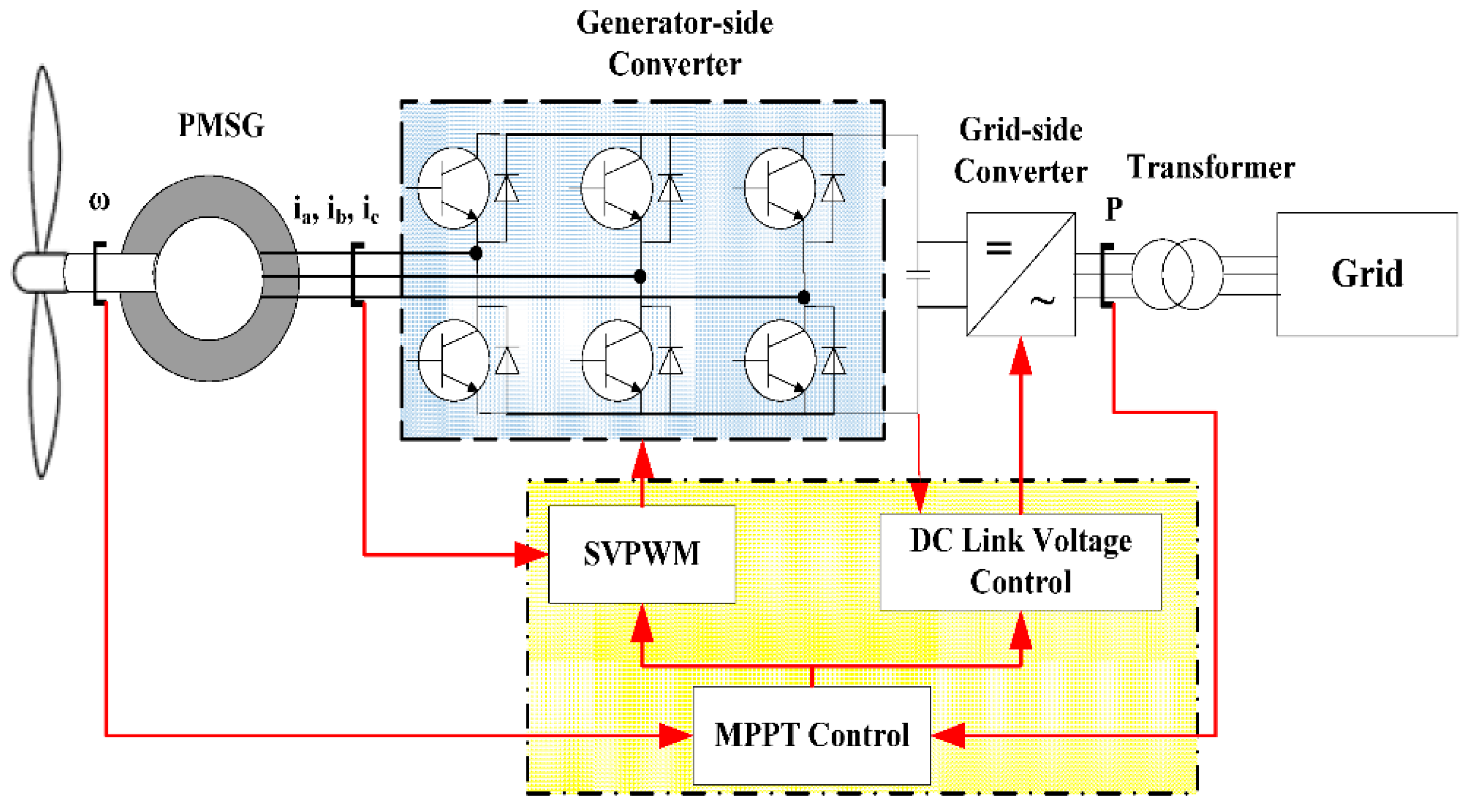
This study analyzes the wind-turbine system modelled by the Simulink-Matlab software. The system comprises a wind turbine, PMSG, a rectifier, MPPT, and an inverter. The turbine converts wind into mechanical energy, the PMSG transforms the mechanical energy into electricity, and the rectifier ensures that the AC electrical voltage is transformed into DC electrical current. Furthermore, the MPPT maximizes the output power of the wind turbine system, and the inverter converts the DC into AC voltage. The block diagram of the wind turbine system with MPPT and circuit diagram are shown in
Figure 6 and
Figure 7.
The parameters used in this study are shown in
Table 1, where the mechanical output of power is 3000 W. It has a base electrical generator power of 1111.11 VA and a base wind speed of 12 m/s. The maximum power at base wind speed is 0.73 p.u, while the base rotational speed of the generator is 1.2 p.u. The pitch angle employed is 0°.
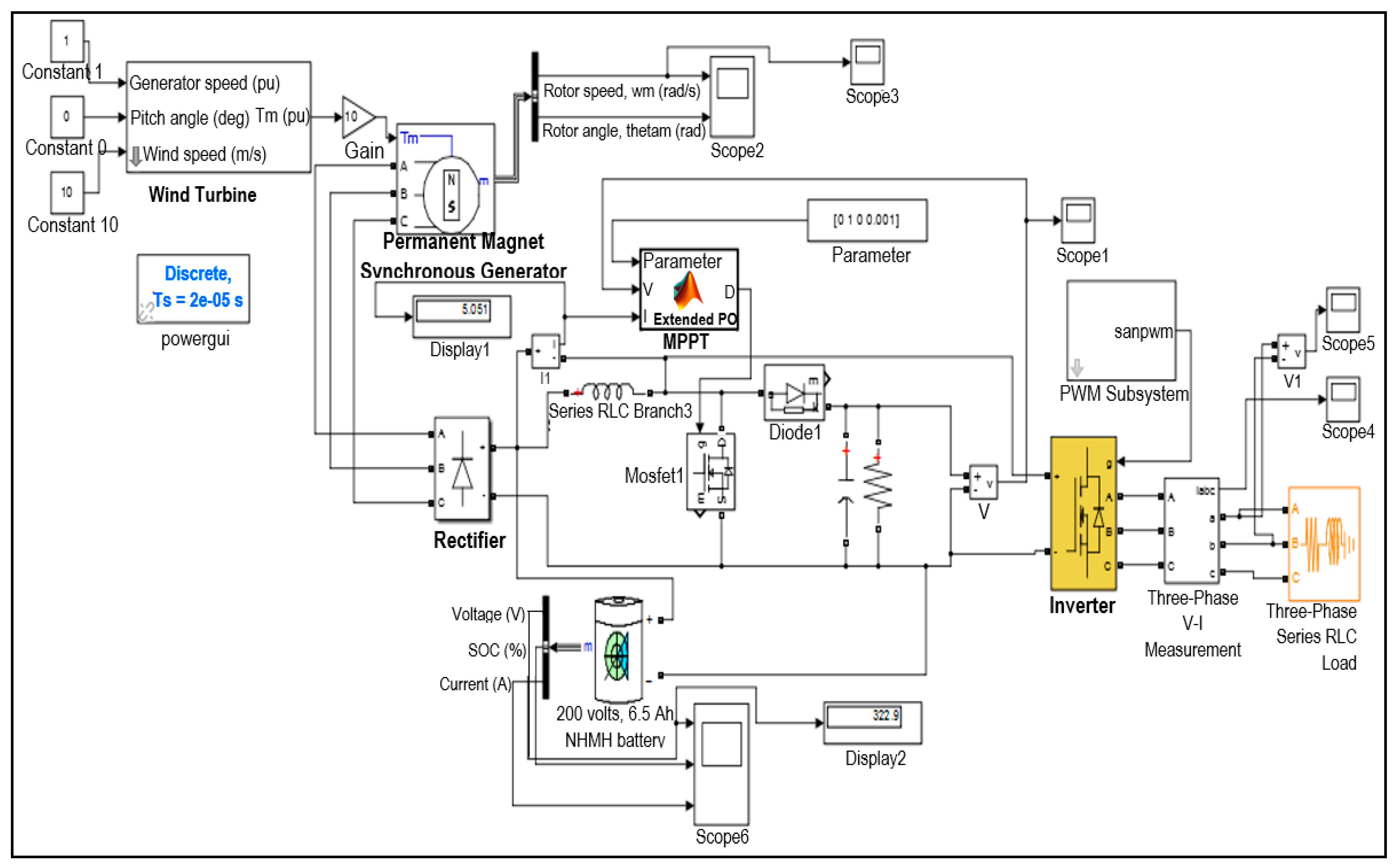
Wind turbine circuit diagram system with MPPT in the Simulink software, as shown in
Figure 7, is an implementation of a block diagram of the wind turbine system with MPPT, as shown in
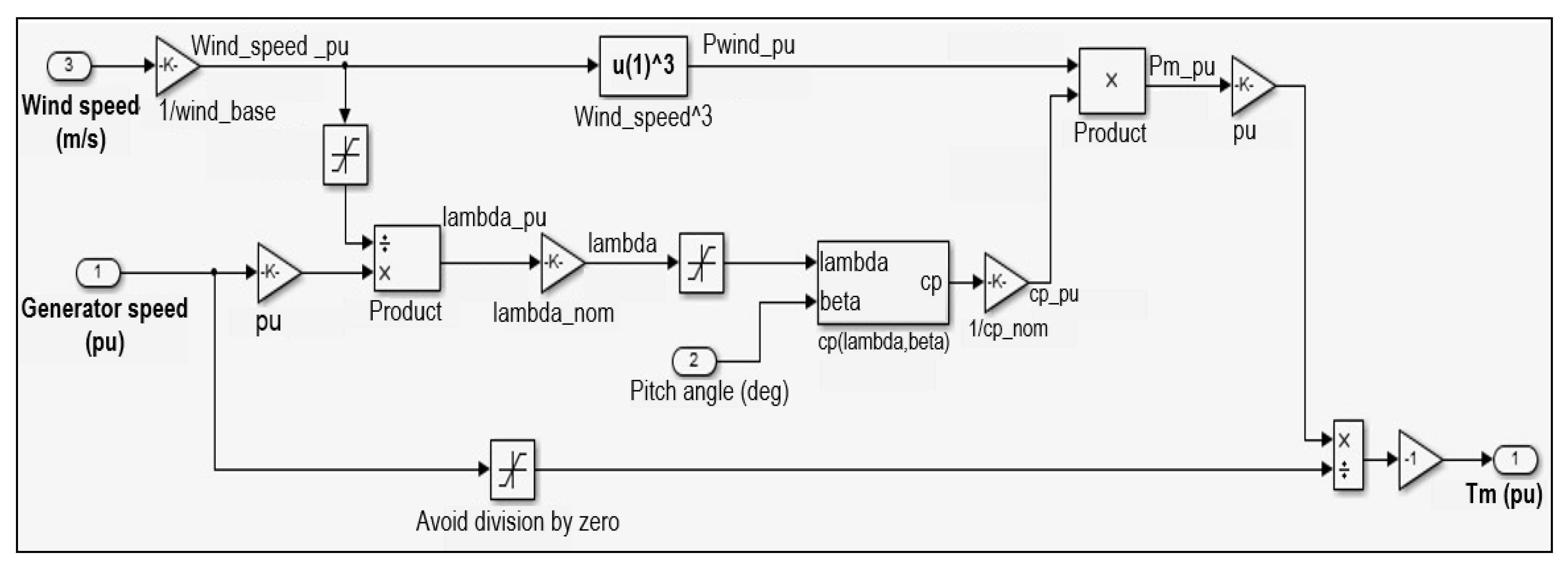
Figure 6. The wind turbine model in Simulink-Matlab software is presented in
Figure 8.
There are three inputs and one output of the system, as shown in
Figure 8. The first input is the speed of the generator from the rotor. There is a pitch angle measured in degrees, and in this study, we use 0°. The third input is the wind speed in m/s, adjusted for the simulated conditions, namely both are constant and changing. The output of the turbine is the mechanical torque of the rotation. The turbine is then connected to the PMSG generator.
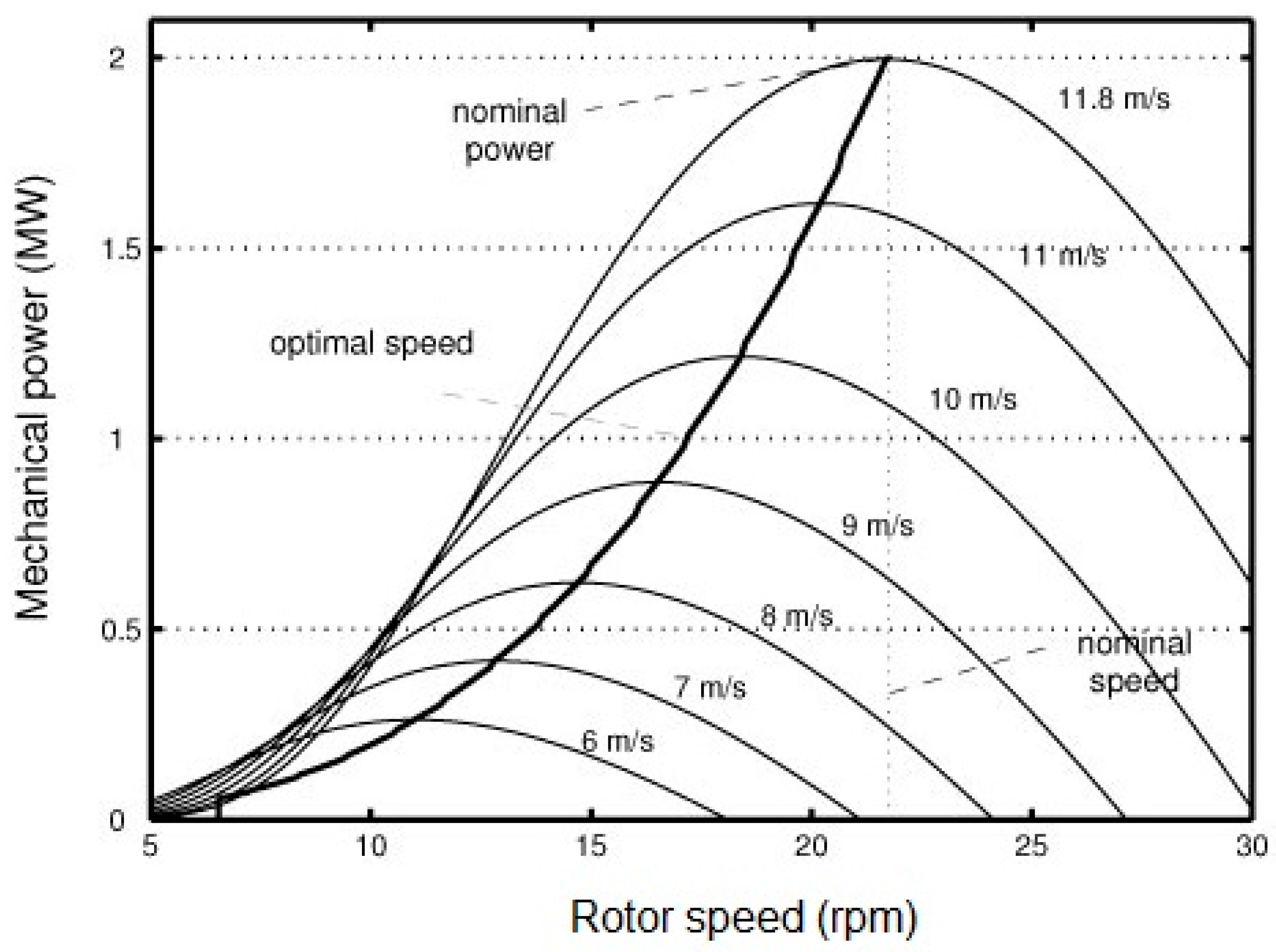
This wind turbine system is adapted to speeds ranging from 3 to 15 m/s, with optimal occurrence between 11:00 a.m. to 02:00 p.m. Along with this condition, the off-grid system is required to store the electrical energy produced. In this study, the generator used is a 3-phase PMSG type, as shown in
Table 2. The 3-phase power voltage generated uses a rectifier to achieve a 48 V DC voltage, which can be connected to the battery, a converter, and an inverter to serve electric loads. As shown in
Figure 1 and
Figure 2, the MPPT is used to optimize generator voltage through rectifiers at boost converter locations. Furthermore, rectifier parameters are used in this study, as shown in
Table 3. The power used is a bridge-type, where the resistance-capacitance (RC) snubber circuits are connected to each switch device in parallel form.
Figure 9 shows the model of the boost converter circuit in Simulink-Matlab. The parameters in the boost converter are shown in
Table 4. In order to determine the boost converter circuit, an input voltage (
Vin) of 100 V, is used to test the system, as shown in
Figure 10. Results obtained prove that the model is able to produce the required voltage.
Table 4 shows battery parameters, while the inverter, which is a bridge of selected power electronic devices consisting of RC snubber circuits connected in parallel with each switch device is shown in
Table 5.
4.2. Evaluation of Perturb and Observe Algorithm
In the PO algorithm, the quantity of input is voltage, and the output is the current of PMSG generator. These voltages and currents are further utilized in order to obtain an optimal output, as shown in
Figure 7. The following stages are involved in the PO algorithm process.
- (1)
Initial voltage measurement is determined to study the exact value of the current PMSG generator output voltage.
- (2)
The power PMSG generator is measured to determine its current value.
- (3)
The power difference is calculated to actuate the difference between the present and the previously measured power.
- (4)
The voltage and power are compared to figure out the process involved in the changes. From this comparison, the generator voltage will be larger or smaller, depending on the generator power and measured voltage differences.
- (5)
If the above stages turn out to be successful, step 1 is repeated.
After the PO algorithm is applied to the wind-turbine system, its validity and sensitivity are evaluated. In this study, the algorithm is valid if the standard value of deviation is less than 1% in 6 experiments. This fact is also similar to its sensitivity, which is also conducted by changing the wind speed.
A validity test is carried out to examine the results using the PO algorithm, and by conducting repetitive experiments for fixed parameters with a particular input, followed by an observation of mean and standard deviation from the experimental data. In this test, a winding rate of 10 m/s is used as an input with fixed turbine-system parameters. The results of the algorithm validity test are shown in
Table 6.
The test resulted to a standard deviation value of 0, which means that the optimization procedure produced the same value in each experiment; hence, the output power of the wind-turbine system can be categorized as valid.
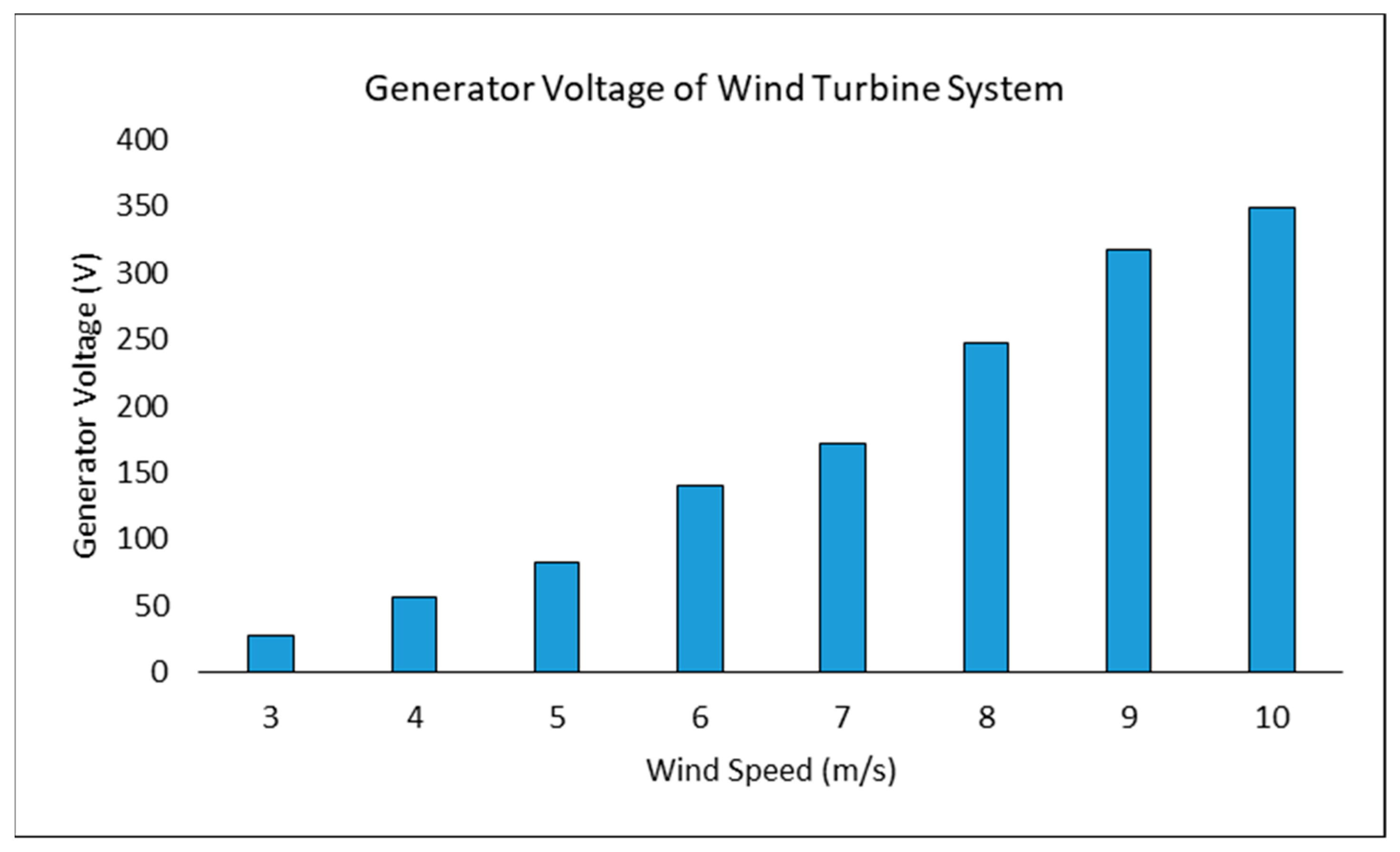
In order to determine the effect of the changes associated with the parameter values, a sensitivity analysis of the PO algorithm is tested by varying the value of the wind speed between 3 to 10 m/s with a fixed power generator value of 3000 W. In this experiment, 100 Ω resistance was used, and results obtained are shown in
Table 7 and
Figure 10. From the experimental results, it can be seen that the higher the wind speeds the more significant the voltage and power of the generator. This fact is because the rotor speed increases with a rise in wind speed, which also affects the power generated. The results of experiments in
Table 7 and
Figure 11 also prove that same.
4.3. Performance Test of Wind-Turbine System
In this section, a test is conducted on the wind turbine systems in order to improve the performance.
Figure 12 and
Figure 13 are used to test the Simulink Matlab performance with the installation of MPPT controllers. Test results of the system performance with and without the MPPT controller are shown in
Table 8.
Table 8 shows the results of the wind turbine system performance test from simulations in
Figure 12 and
Figure 13. The performance test is carried out with a 3000 W wind turbine with electrical loads of 50 Ω, 100 Ω, 200 Ω, and 300 Ω, respectively in order to assess the performance of the turbine while serving the increased load with and without the MPPT controller.
As seen in
Table 8, the greater the electrical load served, the higher the output power of the PMSG generator from the wind turbine. The most considerable output power is obtained when the system serves the highest electrical load of 300 Ω. Furthermore, the electrical load, and wind speed variation, on the prevailing wind conditions in Indonesia (i.e., 4, 5, 6.5, 7, 8.5, 9, and 10 m/s), is examined. Overall, the MPPT controller is able to increase the wind turbine system’s power output significantly. The average power increase after installing the MPPT controller using the PO algorithm is 50.77%. The results are presented in graphical form to clearly analyze the effect of the MPPT controller on various wind speed variations, as shown in
Figure 14,
Figure 15,
Figure 16 and
Figure 17.
Figure 14 shows the output power of the wind-turbine system with a load resistance of 50 Ω. At wind speeds of 4 m/s, the turbine system without MPPT produces 33.76 V, and at an electrical current of 0.67 A, and the output power of the turbine is 22.62 W. The application of an MPPT controller on the PMSG generator side converter generated both voltage and current of 33.83 V and 0.69 A, respectively, resulting in output power of 23.34 W. In this case, the system output power is increased by 3.20% before implementing the MPPT controller. Furthermore, the system performance test with wind speeds of 5, 6.5, 7, 8.5, 9, and 10 m/s, respectively, were examined. Based on the graph in
Figure 14, it can be concluded that the higher the wind speed that hits the turbine, the greater the voltage, current, and output power with the best output recorded at 10 m/s. The condition without MPPT produced a voltage of 174.35 V with a load current of 3.49 A, thereby, generating power of 608.48 W.
Furthermore, with the application of the MPPT controller, there is an increase in voltage, load current, and system output power of 183.81 V, 3.95 A, and 726.05 W, respectively. When compared to the condition before the application, an increase in system output power by 19.32% is displayed. Based on the graph in
Figure 14, the best performance of the MPPT controller in increasing the output power occurs precisely at wind speeds of 8.5 m/s, where the percentage increase in output power is 20.27%. Overall, it can be seen that the MPPT controller using the PO algorithm has successfully improved the performance of wind turbine systems.
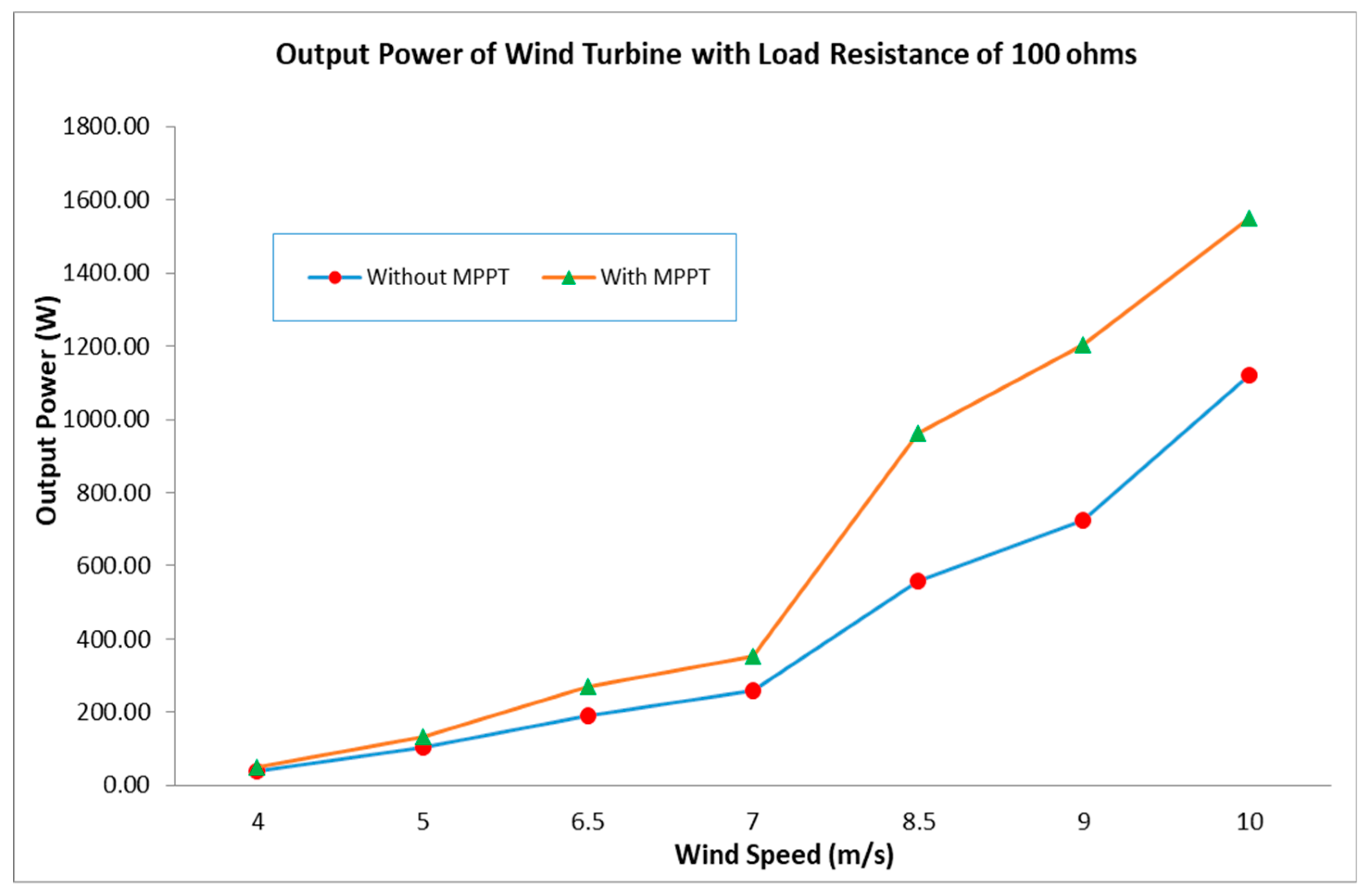
The output power of the wind turbine system with a load resistance of 100 Ω is shown in
Figure 15. At a wind speed of 4 m/s, and without MPPT, the system produces a voltage of 62.63 V and an electric current of 0.62 A to serve the load resistance of 100 Ω, with an output turbine power of 38.83 W. Furthermore, the application of the MPPT controller on the PMSG generator side converter, as well as the voltage and current generated was 66.24 V and 0.75 A, respectively, resulting in output power of 49.68 W. This result means that the system output power is increased by 27.94% compared to when the MPPT controller was not implemented. Furthermore, the system performance test with a wind speed of 5, 6.5, 7, 8.5, 9, and 10 m/s, was examined. Based on the graph in
Figure 15, it can be seen that the higher the wind speed, the greater the voltage, current, and output power of the system. The results show that the best output is produced with a wind speed of 10 m/s. Without applying the MPPT, the voltage produced was 335.09 V with a load current of 3.35 A, and power of 1122.55 W.
Furthermore, with the application of the MPPT, there is an increase in voltage, load current, and system output power of 348.61 V, 4.45 A, and 1151.3 W, respectively. When compared to the condition before the application of the MPPT, an increase in system output power by 38.20% is noticed. Based on the graph in
Figure 15, it can also be seen that the best performance of the MPPT controller in increasing the output power of the system occurs precisely at the of 8.5 m/s wind speed, where the percentage increase in output power is 71.68%. Overall, it can be seen that the MPPT controller using the extended PO algorithm has successfully improved the performance of wind-turbine systems.
Figure 16 shows the output power of the turbine system with a load resistance of 200 Ω. At a wind speed of 4 m/s, and without implementing the MPPT, it produces a voltage of 116.51 V and electric current of 0.58 A to serve the load resistance of 200 Ω with an output power of 67.58 W. Along with the application of the MPPT controller on the PMSG generator, both voltage and current of 134.81 V and 1.14 A were generated, which resulted in output power of 153.68 W. Furthermore, the system performance test with wind speeds of 5, 6.5, 7, 8.5, 9, and 10 m/s, respectively, was examined. Based on the graph in
Figure 16, it can be seen that the higher the wind speed, the greater the voltage, current, and output power of the wind turbine system. The results show that at a wind speed of 10 m/s, the system produces the optimal output.
Similarly, without implementing the MPPT, 547.11 V with a load current of 2.73 A were produced, which generated a total power of 1493.61 W. However, with the application of the MPPT controller, an increase in voltage, load current, and system output power of 586.44 V, 3.53 A, and 2070.13 W, respectively, was recorded. When compared to the condition before the application of the MPPT, the system output power is increased by 38.60%. Based on the graph in
Figure 16, it can also be seen that the best performance of the MPPT controller in increasing the output power of the system occurs precisely when the wind speed is 6.5 m/s, with an output percentage power output of 135.62%. Overall, implementing the MPPT controller using the extended PO algorithm has successfully enhanced the performance of wind turbine systems.
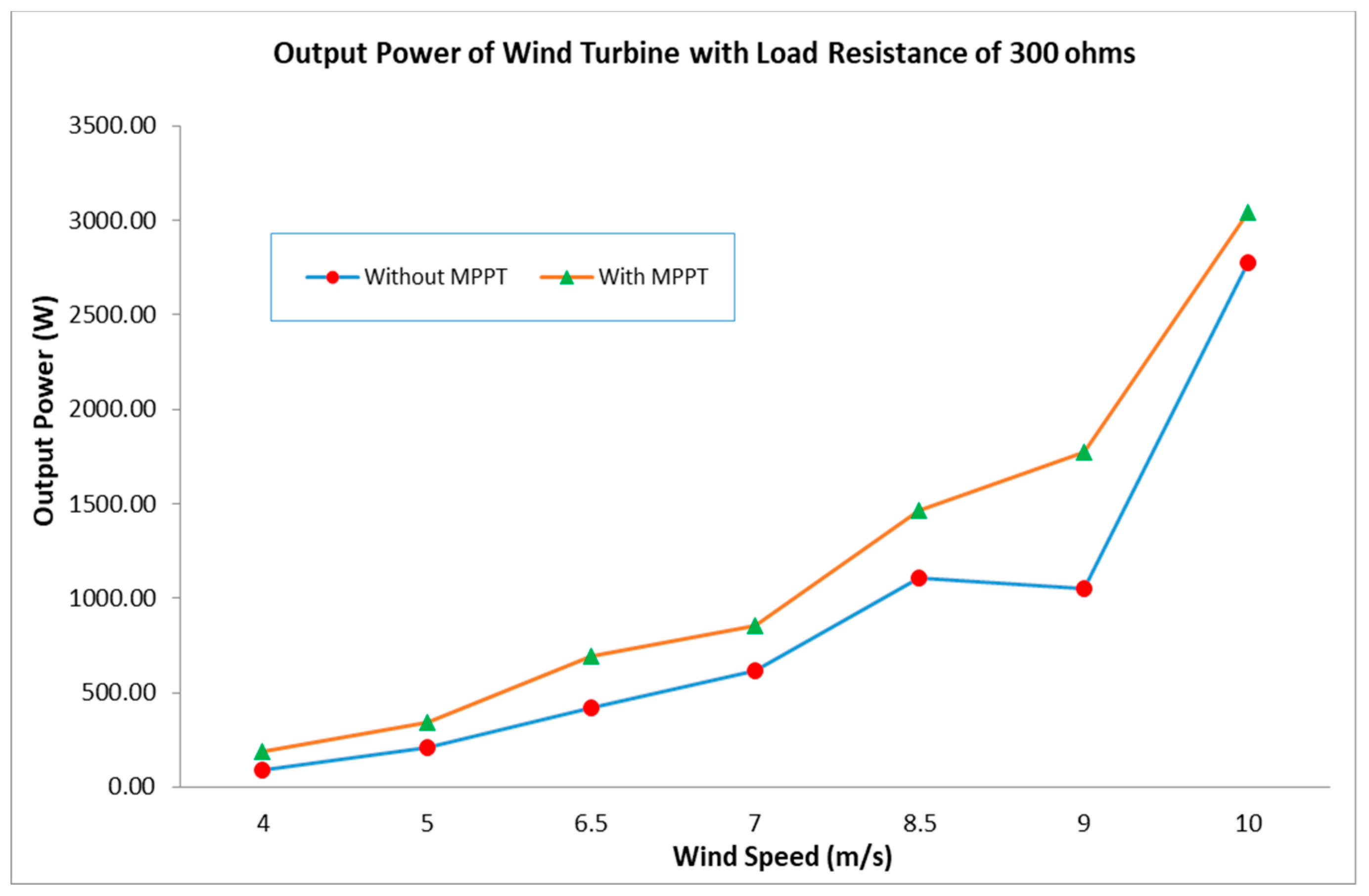
The output power of the wind turbine system with a load resistance of 300 Ω is shown in
Figure 17. At wind speeds of 4 m/s, the system without MPPT produces a voltage of 166.03 V and electric current of 0.55 A which is used to serve the load resistance of 300 Ω with an overall output power of 91.32 W. The application of the MPPT controller on the PMSG generator produced a voltage and current of 184.25 V and 1.03 A, respectively, with an overall power output of 189.78 W. In this case, the system output power increased by 107.82% compared to when the MPPT controller was not implemented. Furthermore, the system performance test with wind speeds of 5, 6.5, 7, 8.5, 9, and 10 m/s, respectively, was examined.
Based on the graph in
Figure 17, the higher the wind speed, the greater the voltage, current, and output power of the wind turbine system. The results show that the system produces an outstanding wind speed of 10 m/s. Without the implementation of the MPPT, the generated voltage is 902.72 V with a load current of 3.04 A, thus creating a power of 2734.67 W. Furthermore, with the application of the MPPT controller, there is an increase in voltage, load current, and system output power of 817.71 V, 3.72 A, and 2999.88 W, respectively. When compared to the initial condition, an increase in system output power by 9.63% can be detected. Based on the graph in
Figure 17, the best performance of the MPPT controller in increasing the output power of the system occurs when the wind speed is 4 m/s, with a percentage increase in output power of 107.82%.
Based on the results of the overall wind-turbine system performance test, the most significant increase in system output power occurs when the system is loaded with 200 Ω, with a wind speed of 6.5 m/s. In this condition, there has been a high increase of output power by 135.62%, caused by the installation of the MPPT controller in the wind-turbine system, while the average growth of output power is only 50.77%. Thus, it can be concluded that MPPT using the extended PO method in this study has been proven to be able to increase the performance of wind-turbine systems.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
















