A Power Control Mean Field Game Framework for Battery Lifetime Enhancement of Coexisting Machine-Type Communications



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
Contributions
- Battery lifetime modeling is performed for battery-limited MTC nodes and the notions of an individual as well as network lifetimes are introduced and proven to equate to energy efficiency and power control in the discussed coexisting network.
- The uplink power control design in a coexisting HTC/MTC network is formulated as a stochastic differential game (SDG) by selecting appropriate state dynamics.
- A mean field game (MFG) for the MTC network is formulated which can accommodate a massive number of devices. State space of remaining battery energy and interference is considered to find an optimal power control policy for MTC transmit power allocations.
- A modified utility function is proposed for the formulated MFG depending on the signal-to-interference-plus-noise-ratio (SINR) thresholding and experienced interference power. A mean field approximation (MFA) technique is utilized to modify the formulated utility function to more appropriately adapt to the converted MFG design.
- The proposed MFG is solved using finite difference scheme with Lax-Freidrichs technique being utilized to solve the coupled FPK and HJB system of equations.
- Equilibrium analysis for the SDG as well as MFG design is performed by considering the formulated cost function.
2. Literature Review
3. Architecture and Problem Formulation
3.1. Network Model
3.2. System Model
3.2.1. Hybrid Interference Model
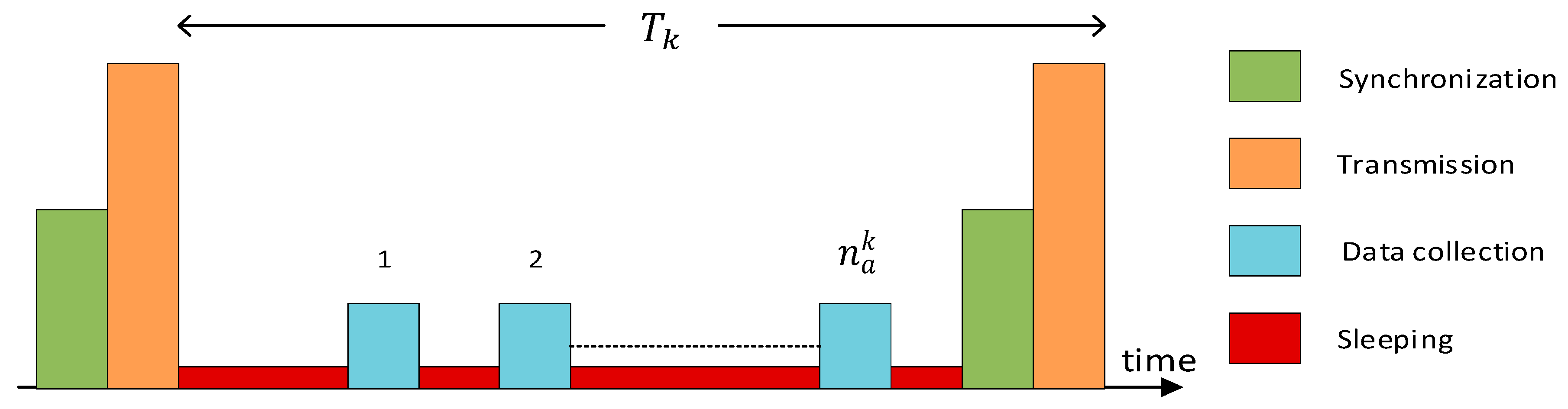
3.2.2. Individual Battery Lifetime
3.2.3. Battery Lifetime and Energy Efficiency
3.2.4. Network Battery Lifetime
3.3. Problem Formulation
4. Stochastic Differential Power Control Game
4.1. State Space Model
4.2. Utility Function
4.3. Optimal Control Policy
4.4. Stability and Equilibrium Analysis
5. Mean Field Power Control Game
5.1. Mean Field Game
5.1.1. Mean Field and Player Interactions
- Individual player makes a small contribution towards mass of all the other players and the MFG. This property ensures that the players act in a more rational and independent manner while choosing the optimal control policy.
- The action selection by each player depends on its own interests and only interacts with the mean field of players instead of participating in individual interactions.
- The continuity property of the mean field model is ensured by the provision of the massive number of MTC devices for power control.
- When analyzing a K-player game, the MFA technique is used to model the actions of the players and prove the exchangeability property.
5.1.2. Mean Field Utility Function
5.1.3. Mean Field Game Formulation and Equilibrium Analysis
5.2. Finite Difference-Based MFG Solution
5.2.1. Solving HJB and FPK Equations
5.2.2. Power Control Scheme
| Algorithm 1: Finite difference method for optimal mean field, Lagrangian and transmission power evaluation | |
| Initialization:M(0, 0, 0), P(X + 1, 0, 0), λ(X + 1, 0, 0), Iter = 1 repeat Step 1: Mean field evaluation for alli = 1: 1: Xdo for allj = 1: 1: Ydo for allk = 1: 1: Kdo Calculate mean field M(i + 1, j, k) using Equation (31) if P(i, j + 1, k) = 0 M(i + 1, j + 1, k + 1) = M(i, j, k) else: M(i + 1, j + 1, k + 1) = 0 end end end Step 2: Lagrangian evaluation for all i = X + 1: −1: 1 do | for allj = 1: 1: Y+1do for all k = 1: 1: K do Calculate λ(i−1,j,k) using Equation (39) end end end for Step 3: Transmission power evaluation for all i = 1: 1: X + 1 do for all j = 1: 1: Y + 1 do for all k = 1: 1: K do Calculate P(i−1,j,k) using Equation (38) end end end until Iter ≥ Itermax |
6. Performance Evaluation and Discussion
6.1. Simulation Setup
6.2. Simulation Results
6.2.1. Mean Field Power Control Policy
6.2.2. MTC Power Allocation and Battery Energy State
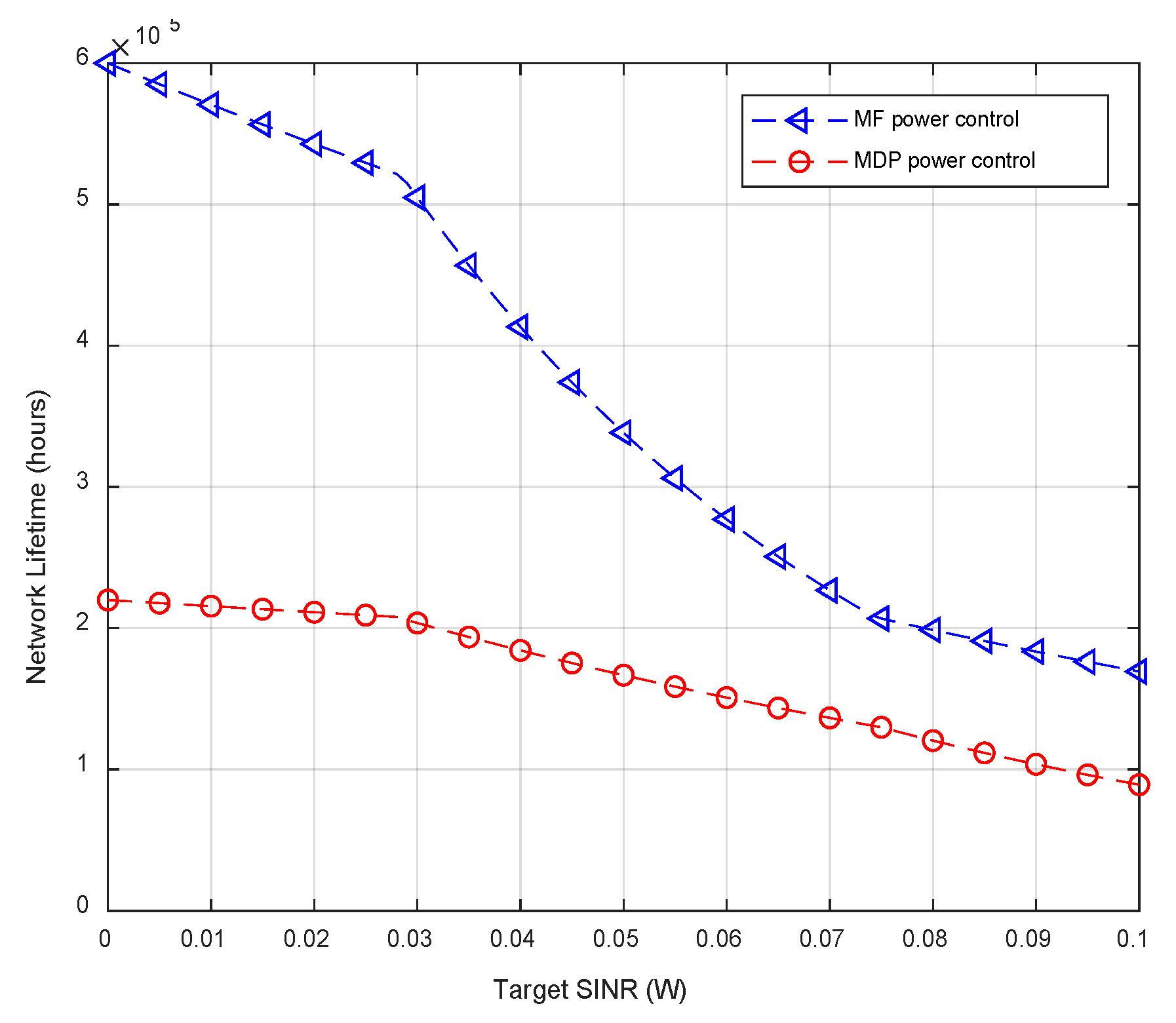
6.2.3. Energy Efficiency and Network Lifetime
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- ITU-R. [IMT-2020.TECH PERF REQ]–Minimum Requirements Related to Technical Performance for IMT2020 Radio Interface(s) . Report ITU-R M.2410-0; ITU-R. 2017. Available online: https://www.itu.int/pub/R-REP-M.2410-2017 (accessed on 9 October 2019).
- Bockelmann, C. Massive machine-type communications in 5G: Physical and MAC-layer solutions. IEEE Commun. Mag. 2016, 54, 59–65. [Google Scholar] [CrossRef]
- 3GPP. Service Requirements for Machine-Type Communications (MTC), Document 3GPP TS 22.368 Version 14.0.0 Release 14, March. 2013. Available online: https://www.3gpp.org/DynaReport/22368.htm (accessed on 9 October 2019).
- InfoQ. Cellular Technologies Enabling the Internet of Things, 4G Americas, Bellevue, WA, USA, Tech. Rep. Available online: https://www.infoq.com/news/2015/12/cellular-enabling-iot/ (accessed on 15 May 2019).
- Ericsson. Cellular Networks for Massive IoT: Enabling Low Power Wide Area Applications. Available online: https://www.ericsson.com/en/white-papers/cellular-networks-for-massive-iot--enabling-low-power-wide-area-applications (accessed on 10 May 2019).
- Ericsson. Ericsson Mobility Report, Nov 2018. Available online: https://www.ericsson.com/assets/local/mobility-report/documents/2018/ericsson-mobility-report-november-2018.pdf (accessed on 10 June 2019).
- Laner, M.; Svoboda, P.; Nikaein, N.; Rupp, M. Traffic Models for Machine Type Communications. In Proceedings of the ISWCS 2013, The Tenth International Symposium on Wireless Communication Systems, Ilmenau, Germany, 27–30 August 2013; pp. 1–5. [Google Scholar]
- Mehaseb, M.; Gadallah, Y.; Elhamy, A.; El-Hennawy, H. Classification of LTE uplink scheduling techniques: An M2M perspective. IEEE Commun. Surv. Tutor. 2015, 18, 1310–1335. [Google Scholar] [CrossRef]
- Lioumpas, A.S.; Alexiou, A. Uplink scheduling for machine-to-machine communications in LTE-based cellular systems. In Proceedings of the IEEE GLOBECOM Workshops, Houston, TX, USA, 5–9 December 2011; pp. 353–357. [Google Scholar]
- Zhenqi, S.; Haifeng, Y.; Xuefen, C.; Hongxia, L. Research on uplink scheduling algorithm of massive M2M and H2H services in LTE. In Proceedings of the IET International Conference on Information and Communications Technologies, Beijing, China, 27–29 April 2013; pp. 365–369. [Google Scholar]
- Giluka, M.K. Class based dynamic priority scheduling for uplink to support M2M communications in LTE. In Proceedings of the IEEE World Forum on Internet of Things, Seoul, Korea, 6–8 March 2014; pp. 313–317. [Google Scholar]
- Afrin, N.; Brown, J.; Khan, J.Y. Performance analysis of an enhanced delay sensitive LTE uplink scheduler for M2M traffic. In Proceedings of the Australasian Telecommunication Networks and Applications Conference, Christchurch, New Zealand, 20–22 November 2013; pp. 154–159. [Google Scholar]
- Mahmud, S.A. Fairness evaluation of scheduling algorithms for dense M2M implementations. In Proceedings of the IEEE Wireless Communications and Networking Conference Workshops, Istanbul, Turkey, 6–9 April 2014; pp. 134–139. [Google Scholar]
- Aijaz, A.; Tshangini, M.; Nakhai, M.; Chu, X.; Aghvami, A. Energy-efficient uplink resource allocation in LTE networks with M2M/H2H co-existence under statistical QoS guarantees. IEEE Trans. Commun. 2014, 62, 2353–2365. [Google Scholar] [CrossRef]
- Wang, K.; Alonso-Zarate, J.; Dohler, M. Energy-efficiency of LTE for small data machine-to-machine communications. In Proceedings of the IEEE International Conference on Communications, Budapest, Hungary, 9–13 June 2013; pp. 4120–4124. [Google Scholar]
- Kalil, M. Low-complexity power-efficient schedulers for LTE uplink with delay-sensitive traffic. IEEE Trans. Veh. Technol. 2015, 64, 4551–4564. [Google Scholar] [CrossRef]
- Andres-Maldonado, P.; Ameigeiras, P.; Prados-Garzon, J.; Navarro-Ortiz, J.; Lopez-Soler, J.M. Narrowband IoT Data Transmission Procedures for Massive Machine-Type Communications. IEEE Netw. 2017, 31, 8–15. [Google Scholar] [CrossRef]
- Andres-Maldonado, P.; Ameigeiras, P.; Prados-Garzon, J.; Navarro-Ortiz, J.; Lopez-Soler, J.M. An Analytical Performance Evaluation Framework for NB-IoT. IEEE Internet Things J. 2019, 6, 7232–7240. [Google Scholar] [CrossRef]
- Munir, H.; Hassan, S.A.; Pervaiz, H.; Ni, Q. A Game Theoretical Network-Assisted User-Centric Design for Resource Allocation in 5G Heterogeneous Networks. In Proceedings of the IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 15–18 May 2016; pp. 1–5. [Google Scholar]
- Zheng, J.; Wu, Y.; Zhang, N.; Zhou, H.; Cai, Y.; Shen, X. Optimal power control in ultra-dense small cell networks: A game-theoretic approach. IEEE Trans. Wirel. Commun. 2017, 16, 4139–4150. [Google Scholar] [CrossRef]
- Liu, Z.; Li, S.; Yang, H.; Chan, K.Y.; Guan, X. Approach for power allocation in two-tier femtocell networks based on robust non-cooperative game. IET Commun. 2017, 11, 1549–1557. [Google Scholar] [CrossRef]
- Kang, K.; Pan, Z.; Liu, J.; Shimamoto, S. A game theory based power control algorithm for future MTC NOMA networks. In Proceedings of the 14th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 8–11 January 2017; pp. 203–208. [Google Scholar]
- Huang, J.; Huang, S.; Xing, C.; Qian, Y. Game-Theoretic Power Control Mechanisms for Device-to-Device Communications Underlaying Cellular System. IEEE Trans. Veh. Technol. 2018, 67, 4890–4900. [Google Scholar] [CrossRef]
- Semasinghe, P.; Hossain, E. Downlink Power Control in Self-Organizing Dense Small Cells Underlaying Macrocells: A Mean Field Game. IEEE Trans. Mob. Comput. 2016, 24, 624–637. [Google Scholar] [CrossRef]
- Samarakoon, S. Energy-Efficient Resource Management in Ultra Dense Small Cell Networks: A Mean-Field Approach. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015. [Google Scholar]
- Tembine, H.; Tempone, R.; Vilanova, R. Mean Field Games for Cognitive Radio Network. In Proceedings of the American Control Conference (ACC), Montreal, QC, Canada, 27–29 June 2012; pp. 6388–6393. [Google Scholar]
- Hanif, A.F. Mean-Field Games for Resource Sharing in Cloud-Based Networks. IEEE/ACM Trans. Netw. 2016, 24, 624–637. [Google Scholar] [CrossRef]
- Huang, M.Y. Mean field stochastic games with discrete states and mixed players. In Proceedings of the GameNets, Vancouver, BC, Canada, 24–26 May 2012; pp. 138–151. [Google Scholar]
- Adlakha, S.; Johari, R. Mean field equilibrium in dynamic games with complementarities. In Proceedings of the 49th IEEE CDC, Atlanta, GA, USA, 15–17 December 2010; pp. 6633–6638. [Google Scholar]
- Abhishek, V.; Adlakha, S.; Johari, R.; Weintraub, G. Oblivious equilibrium for general stochastic games with many players. In Proceedings of the Allerton Conference on Communication, Control and Computing, Monticello, IL, USA, 26–28 September 2007; pp. 1–5. [Google Scholar]
- Gueant, O.; Lasry, J.M.; Lions, P.L. Mean field games and applications. In Paris-Princeton Lectures on Mathematical Finance, Lecture Notes in Mathematics; Springer: Berlin, Germany, 2011; pp. 205–266. [Google Scholar]
- Wang, Y.; Yu, F.R.; Tang, H.; Huang, M. A mean field game theoretic approach for security enhancements in mobile ad hoc networks. IEEE Trans. Wirel. Commun. 2014, 13, 1616–1627. [Google Scholar] [CrossRef]
- Meriaux, F.; Varma, V.; Lasaulce, S. Mean field energy games in wireless networks. In Proceedings of the Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 4–7 November 2012; pp. 671–675. [Google Scholar]
- Tembine, H.; Vilanova, P.; Assaad, M.; Debbah, M. Mean field stochastic games for SINR-based medium access control. Proceedings of 5th International ICST Conference on Performance Evaluation Methodologies and Tools, ValueTools, Cachan, France, 16–20 May 2011; pp. 572–581. [Google Scholar]
- Zhang, H. Secure resource allocation for OFDMA two-way relay wireless sensor networks without and with cooperative jamming. IEEE Trans. Ind. Inform. 2015. [Google Scholar] [CrossRef]
- Miao, G.; Himayat, N.; Li, G.Y. Energy-efficient link adaptation in frequency-selective channels. IEEE Trans. Commun. 2010, 58, 545–554. [Google Scholar] [CrossRef]
- Miao, G.; Azari, A.; Hwang, T. E2-MAC: Energy Efficient Medium Access for Massive M2M Communications. IEEE Trans. Commun. 2016, 64, 4720–4735. [Google Scholar] [CrossRef]
- 3GPP. TS 36.213. Evolved Universal Terrestrial Radio Access (E-UTRA), Physical Layer Procedures. Tech. Rep., (Release 13). Available online: http://www.3gpp.org/DynaReport/36213.htm (accessed on 5 August 2019).
- Han, Z.; Niyato, D.; Saad, W.; Basar, T.; Hjorungnes, A. Game Theory in Wireless and Communication Networks: Theory Models and Applications; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Lasry, J.-M.; Lions, P.-L. Mean field games. Jpn. J. Math. 2007, 2, 229–260. [Google Scholar] [CrossRef]
- Meriaux, F.; Lasaulce, S.; Tembine, H. Stochastic differential games and energy-efficient power control. Dyn. Games Appl. 2013, 3, 3–23. [Google Scholar] [CrossRef]
- Michelusi, N.; Stamatiou, K.; Zorzi, M. Transmission policies for energy harvesting sensors with time-correlated energy supply. IEEE Trans. Commun. 2013, 61, 2988–3001. [Google Scholar] [CrossRef]











© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mehmood, K.; Niaz, M.T.; Kim, H.S. A Power Control Mean Field Game Framework for Battery Lifetime Enhancement of Coexisting Machine-Type Communications. Energies 2019, 12, 3819. https://doi.org/10.3390/en12203819
Mehmood K, Niaz MT, Kim HS. A Power Control Mean Field Game Framework for Battery Lifetime Enhancement of Coexisting Machine-Type Communications. Energies. 2019; 12(20):3819. https://doi.org/10.3390/en12203819
Chicago/Turabian StyleMehmood, Kashif, Muhammad Tabish Niaz, and Hyung Seok Kim. 2019. "A Power Control Mean Field Game Framework for Battery Lifetime Enhancement of Coexisting Machine-Type Communications" Energies 12, no. 20: 3819. https://doi.org/10.3390/en12203819
APA StyleMehmood, K., Niaz, M. T., & Kim, H. S. (2019). A Power Control Mean Field Game Framework for Battery Lifetime Enhancement of Coexisting Machine-Type Communications. Energies, 12(20), 3819. https://doi.org/10.3390/en12203819