Research on Theoretical Calculation Methods of Photovoltaic Power Short-Circuit Current and Influencing Factors of Its Fault Characteristics

Abstract
1. Introduction
2. PV Power Topology and Its Control Strategy of LVRT
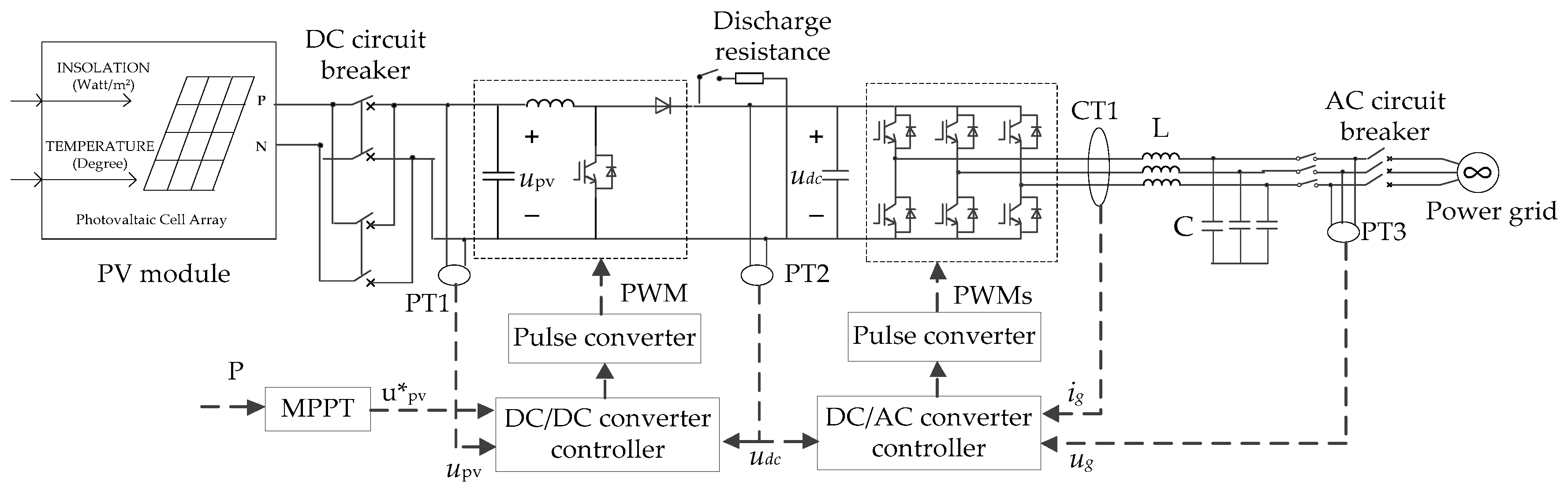
2.1. PV Power Topology and Its Inverter Control Strategy
2.2. DC Unloading Circuit Control Strategy
3. Analysis of PV Power Fault Characteristics
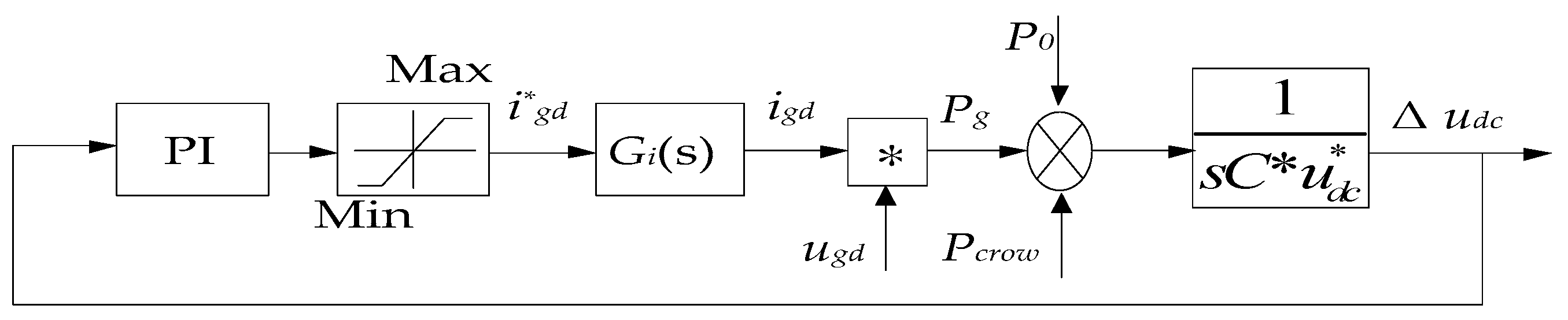
3.1. Fault Current Calculation Model with Considering DC Bus Voltage Fluctuation
3.1.1. Symmetrical Fault Condition
3.1.2. Asymmetric Fault Condition
3.2. Influences Analysis of Unloading Circuit on Fault Current Characteristics
3.3. Steady-State Fault Mathematical Model
4. Simulation and Experiment Verification of PV Power Fault Characteristics
4.1. Digital Simulation Verification
4.1.1. DC Unloading Circuit Does Not Start
4.1.2. DC Unloading Circuit Starts
4.1.3. Asymmetric Fault
4.2. LVRT Experiment Verification
5. Analysis of Factors Affecting PV Power Characteristics
5.1. PI Controller Parameters
5.2. Fault Voltage Sag Depth
5.3. Power Load Level
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Guerrero, J.; Blaabjerg, F.; Zhelev, T.; Hemmes, K.; Monmasson, E.; Jemei, S.; Comech, M.; Granadino, R.; Frau, J. Distributed Generation: Toward a New Energy Paradigm. IEEE Ind. Electron. Mag. 2010, 4, 52–64. [Google Scholar] [CrossRef]
- IEEE P1547 Std. IEEE Standard for Distributed Resources Interconnected with Electric Power Systems; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar]
- Plet, C.A.; Brucoli, M.; McDonald, J.D.F.; Green, T.C. Fault models of inverter-interfaced distributed generators: Experimental verification and application to fault analysis. In Proceedings of the IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–29 July 2011. [Google Scholar]
- Li, Z.; Lu, J.; Zhu, Y.; Jiang, W. Ground-Fault Characteristic Analysis of Grid-Connected Photovoltaic Stations with Neutral Grounding Resistance. Energies 2017, 10, 1910. [Google Scholar] [CrossRef]
- Haj-ahmed, M.A.; Illindala, M.S. The Influence of Inverter-Based DGs and Their Controllers on Distribution Network Protection. IEEE Trans. Ind. Appl. 2014, 50, 2928–2937. [Google Scholar] [CrossRef]
- Zhou, N.; Ye, L.; Wang, Q. Asymmetric Short-circuit Current Calculation for Inverter Interfaced Distributed Generators With Negative Sequence Current Injection Integrated in Power Systems. Proc. CSEE 2013, 33, 41–49. [Google Scholar]
- Jia, K.; Gu, C.; Xuan, Z.; Li, L.; Lin, Y. Fault Characteristics Analysis and Line Protection Design Within a Large-Scale Photovoltaic Power Plant. IEEE Trans. Smart Grid 2018, 9, 4099–4108. [Google Scholar] [CrossRef]
- Baran, M.E.; El-Markaby, I. Fault Analysis on Distribution Feeders with Distributed Generators. IEEE Trans. Power Syst. 2005, 20, 1757–1764. [Google Scholar] [CrossRef]
- Lee, C.; Hsu, C.; Cheng, P. A Low-Voltage Ride-Through Technique for Grid-Connected Converters of Distributed Energy Resources. IEEE Trans. Ind. Appl. 2011, 47, 1821–1832. [Google Scholar] [CrossRef]
- Yazdani, A.; Dash, P.P. A Control Methodology and Characterization of Dynamics for a Photovoltaic (PV) System Interfaced with a Distribution Network. IEEE Trans. Power Deliv. 2009, 24, 1538–1551. [Google Scholar] [CrossRef]
- Kong, X.; Zhang, Z.; Yin, X. Fault Current Study of Inverter Interfaced Distributed Generators. Distrib. Gener. Altern. Energy J. 2015, 30, 6–26. [Google Scholar] [CrossRef]
- Luming, G.; Linan, Q.; Lingzhi, Z.; Ning, C. Impact of fault-ride-through strategy on dynamic characteristics of photovoltaic power plant. J. Eng. 2017, 13, 2130–2134. [Google Scholar] [CrossRef]
- Guo, W.; Mu, L.; Zhang, X. Fault Models of Inverter-Interfaced Distributed Generators Within a Low-Voltage Microgrid. IEEE Trans. Power Deliv. 2017, 32, 453–461. [Google Scholar] [CrossRef]
- Hansen, A.D.; Michalke, G. Multi-pole permanent magnet synchronous generator wind turbines’ grid support capability in uninterrupted operation during grid faults. IET Renew. Power Gen. 2009, 3, 333–348. [Google Scholar] [CrossRef]
- Li, B.; Zhang, H.; Duan, Z. Analysis of the Effect of Control Strategy on the Fault Transient Characteristics of Inverter-based Distributed Generators. Proc. CSU-EPSA 2014, 26, 1–7. [Google Scholar]
- Bi, T.; Liu, S.; Xue, A. Fault Characteristics of Inverter-interfaced Renewable Energy Sources. Proc. CSEE 2013, 33, 165–171. [Google Scholar]
- Wang, Y.; Ren, B. Fault Ride-Through Enhancement for Grid-Tied PV Systems with Robust Control. IEEE Trans. Ind. Electron. 2018, 65, 2302–2312. [Google Scholar] [CrossRef]
- De Brito, M.A.G.; Galotto, L.; Sampaio, L.P.; E Melo, G.D.A.; Canesin, C.A. Evaluation of the Main MPPT Techniques for Photovoltaic Applications. IEEE Trans. Ind. Electron. 2013, 60, 1156–1167. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double Integral Sliding Mode MPPT Control of a Photovoltaic System. IEEE Trans. Contr. Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Conver. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Timbus, A.V. Control strategies for distributed power generation systems operating on faulty grid. In Proceedings of the IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006. [Google Scholar]
- Guo, X.; Wu, W.; Chen, Z. Multiple-Complex Coefficient-Filter-Based Phase-Locked Loop and Synchronization Technique for Three-Phase Grid-Interfaced Converters in Distributed Utility Networks. IEEE Trans. Ind. Electron. 2011, 58, 1194–1204. [Google Scholar] [CrossRef]
- Abbey, C.; Joos, G. Supercapacitor Energy Storage for Wind Energy Applications. IEEE T. Ind. Appl. 2007, 43, 769–776. [Google Scholar] [CrossRef]
- Liang, H.; Feng, Y.; Liu, Z. Research on low voltage ride through of photovoltaic plant based on deadbeat control. Power Syst. Protect. Control 2013, 41, 110–115. [Google Scholar]
- Erickson, R.W.; Maksimovic, D. Fundamentals of Power Electronics, 2nd ed.; Springer: New York, NY, USA, 2012; pp. 337–341. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Name | Value |
|---|---|---|---|
| Maximum DC voltage | 1000 V | Isolating transformer | 315 V/10 kV |
| Power output | 500k W | Busbar parasitic inductance | 20 nH |
| Voltage output | 315 V | Grid frequency | 50 Hz |
| Filter | L = 0.15 mH C = 200 uF | Sampling frequency | 3.2 kHz |
| DC capacitance | 36 × 420 uF | Grid equivalent impedance | 3.8895 mH |
| kp | ki | Free Component Frequency (HZ) | Free Component Decay Time Constant (ms) | Current Limited | Free Component Peak Value (p.u.) | Steady State Value (p.u.) |
|---|---|---|---|---|---|---|
| 2 | 20 | 57.8 | 76.9 | No | 0.20 | 0.85 |
| 0 | 42.2 | |||||
| 4 | 20 | 57.5 | 38.5 | No | 0.23 | 0.85 |
| 0 | 42.5 | |||||
| 7 | 20 | 53.7 | 22 | No | 0.41 | 0.85 |
| 0 | 46.3 | |||||
| 8 | 20 | 50 | 23.9 | No | 0.86 | 0.85 |
| 0 | 16.1 | 1.26 | ||||
| 10 | 20 | 50 | 40.5 | No | 0.12 | 0.85 |
| 0 | 9.5 | 0.51 | ||||
| 2 | 10 | 50 | 148.1 | No | 0.21 | 0.85 |
| 51.9 | 0.61 | |||||
| 2 | 40 | 53 | 76.9 | No | 0.24 | 0.85 |
| 47 | ||||||
| 2 | 10 | 55.4 | 76.9 | No | 0.21 | 0.85 |
| 0 | 44.6 | |||||
| 2 | 25 | 58.8 | 76.9 | No | 0.2 | 0.85 |
| 0 | 41.2 | |||||
| 2 | 50 | 62.7 | 76.9 | No | 0.2 | 0.85 |
| 0 | 37.3 |
| Fault Voltage Sag Depth | Free Component Frequency (HZ) | Free Component Decay Time Constant (ms) | Current Limited | Free Component Peak Value (p.u.) | Steady State Value (p.u.) |
|---|---|---|---|---|---|
| 10% | 60.6 | 39.5 | No | 0.02 | 0.28 |
| 39.4 | |||||
| 20% | 60 | 44.4 | No | 0.04 | 0.35 |
| 40 | |||||
| 30% | 59.5 | 50.8 | No | 0.08 | 0.47 |
| 40.5 | |||||
| 50% | 58.1 | 71.4 | No | 0.18 | 0.78 |
| 41.9 | |||||
| 70% | 56.3 | 119 | Yes | 0.4 | 1.2 |
| 43.7 | |||||
| 80% | 55.3 | 177.6 | Yes | 0.67 | 1.2 |
| 44.7 |
| Power Load Level | Free Component Frequency (HZ) | Free Component Decay Time Constant (ms) | Current Limited | Free Component Peak Value (p.u.) | Steady State Value (p.u.) |
|---|---|---|---|---|---|
| No-load (0%) | - | - | No | - | 0.66 |
| Light-load (25%) | 57.8 | 76.9 | No | 0.2 | 0.85 |
| 42.2 | |||||
| Light-load (35%) | 57.8 | 76.9 | No | 0.28 | 1 |
| 42.2 | |||||
| Half-load (50%) | 57.8 | 76.9 | Yes | 0.41 | 1.2 |
| 42.2 | |||||
| Heavy-load (75%) | 57.8 | 76.9 | Yes | 0.61 | 1.2 |
| 42.2 | |||||
| Full-load (100%) | 57.8 | 76.9 | Yes | 0.81 | 1.2 |
| 42.2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Xu, K.; Zhang, Z.; Liu, W.; Ao, J. Research on Theoretical Calculation Methods of Photovoltaic Power Short-Circuit Current and Influencing Factors of Its Fault Characteristics. Energies 2019, 12, 316. https://doi.org/10.3390/en12020316
Liu H, Xu K, Zhang Z, Liu W, Ao J. Research on Theoretical Calculation Methods of Photovoltaic Power Short-Circuit Current and Influencing Factors of Its Fault Characteristics. Energies. 2019; 12(2):316. https://doi.org/10.3390/en12020316
Chicago/Turabian StyleLiu, Huiyuan, Kehan Xu, Zhe Zhang, Wei Liu, and Jianyong Ao. 2019. "Research on Theoretical Calculation Methods of Photovoltaic Power Short-Circuit Current and Influencing Factors of Its Fault Characteristics" Energies 12, no. 2: 316. https://doi.org/10.3390/en12020316
APA StyleLiu, H., Xu, K., Zhang, Z., Liu, W., & Ao, J. (2019). Research on Theoretical Calculation Methods of Photovoltaic Power Short-Circuit Current and Influencing Factors of Its Fault Characteristics. Energies, 12(2), 316. https://doi.org/10.3390/en12020316