Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photovoltaic with the Variation of Irradiation and Temperature


Abstract
1. Introduction
- The accuracy of global MPP tracking;
- the fast-tracking time with less tracking power loss compared to the conventional scanning method;
- the ability to operate at dynamic changes of shading and weather conditions;
- no irradiation and temperature sensors required;
- no additional control circuits required;
- simple switching control using the centralized converter;
- simple control topology compared to the intelligence tracking methods .
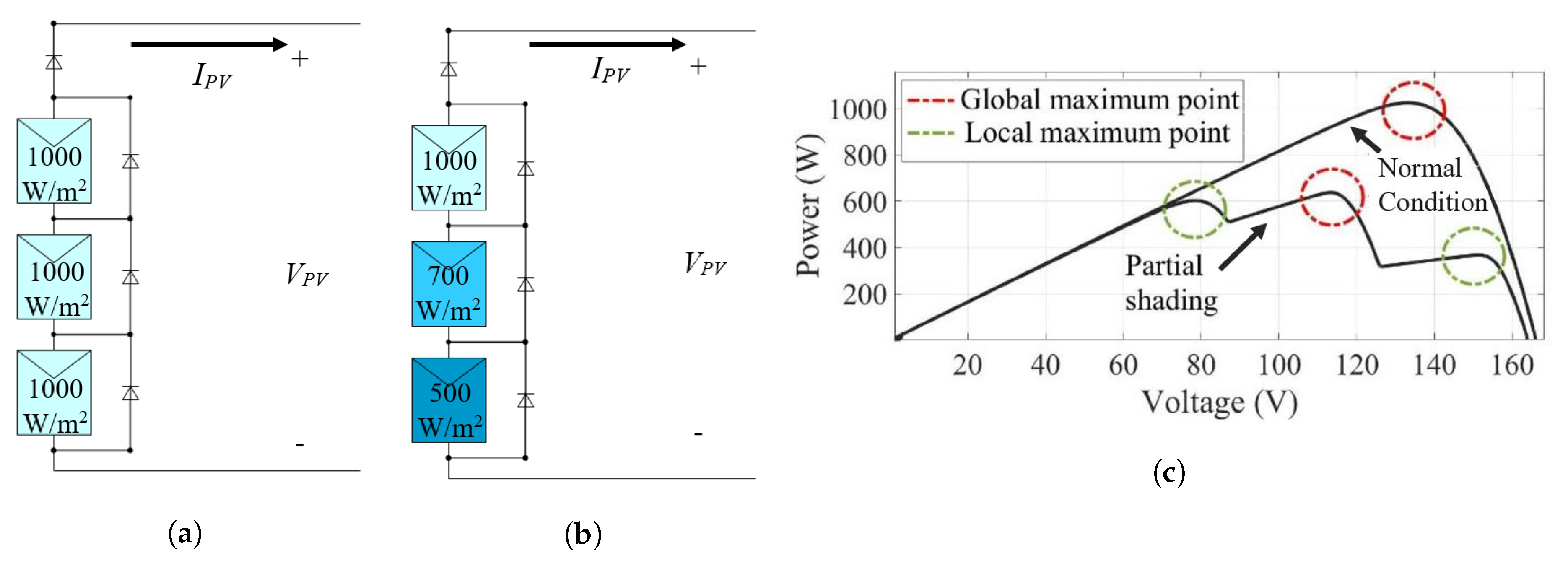
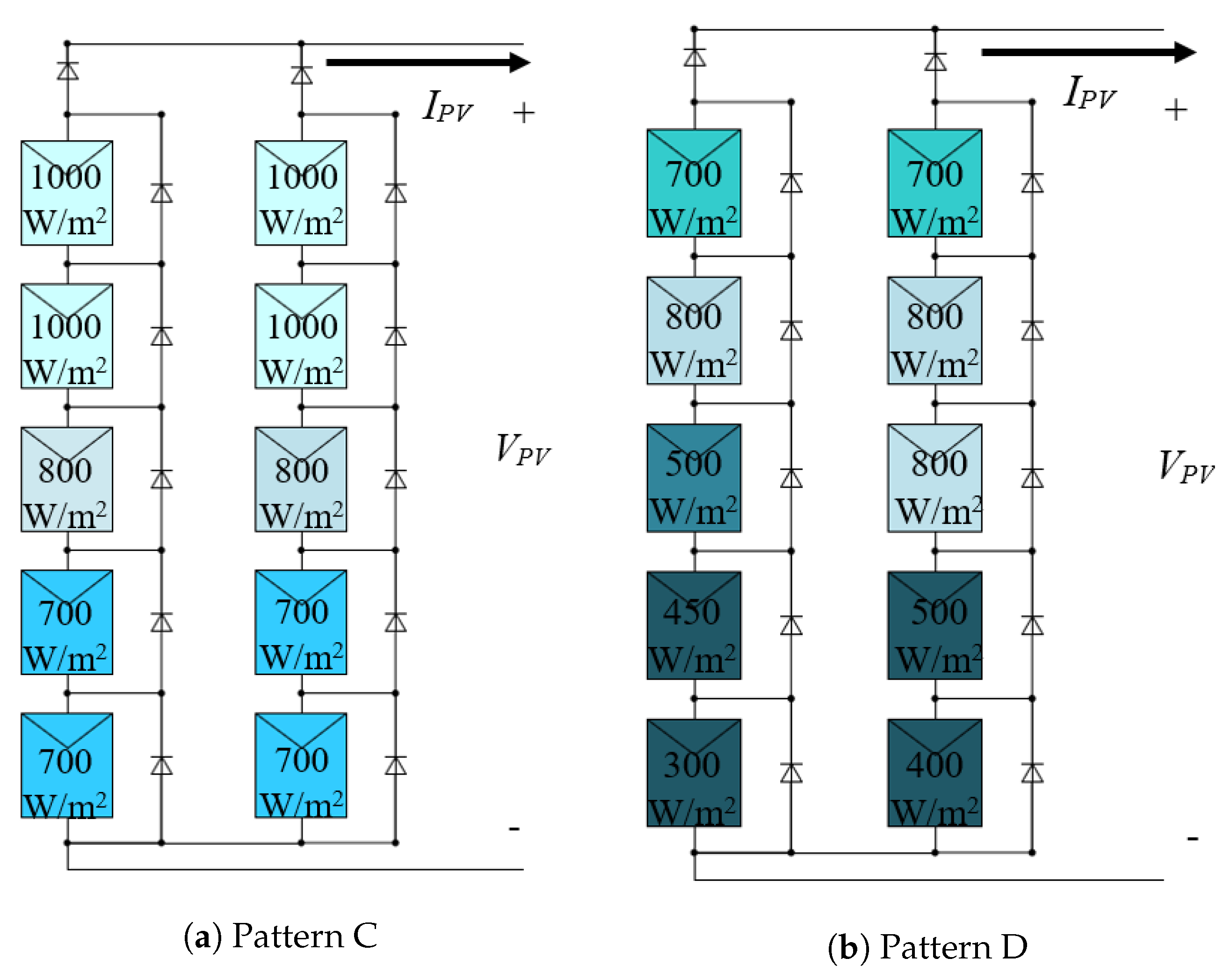
2. Partial Shading Condition for PV Systems
3. System Description and Proposed Global MPPT Algorithm
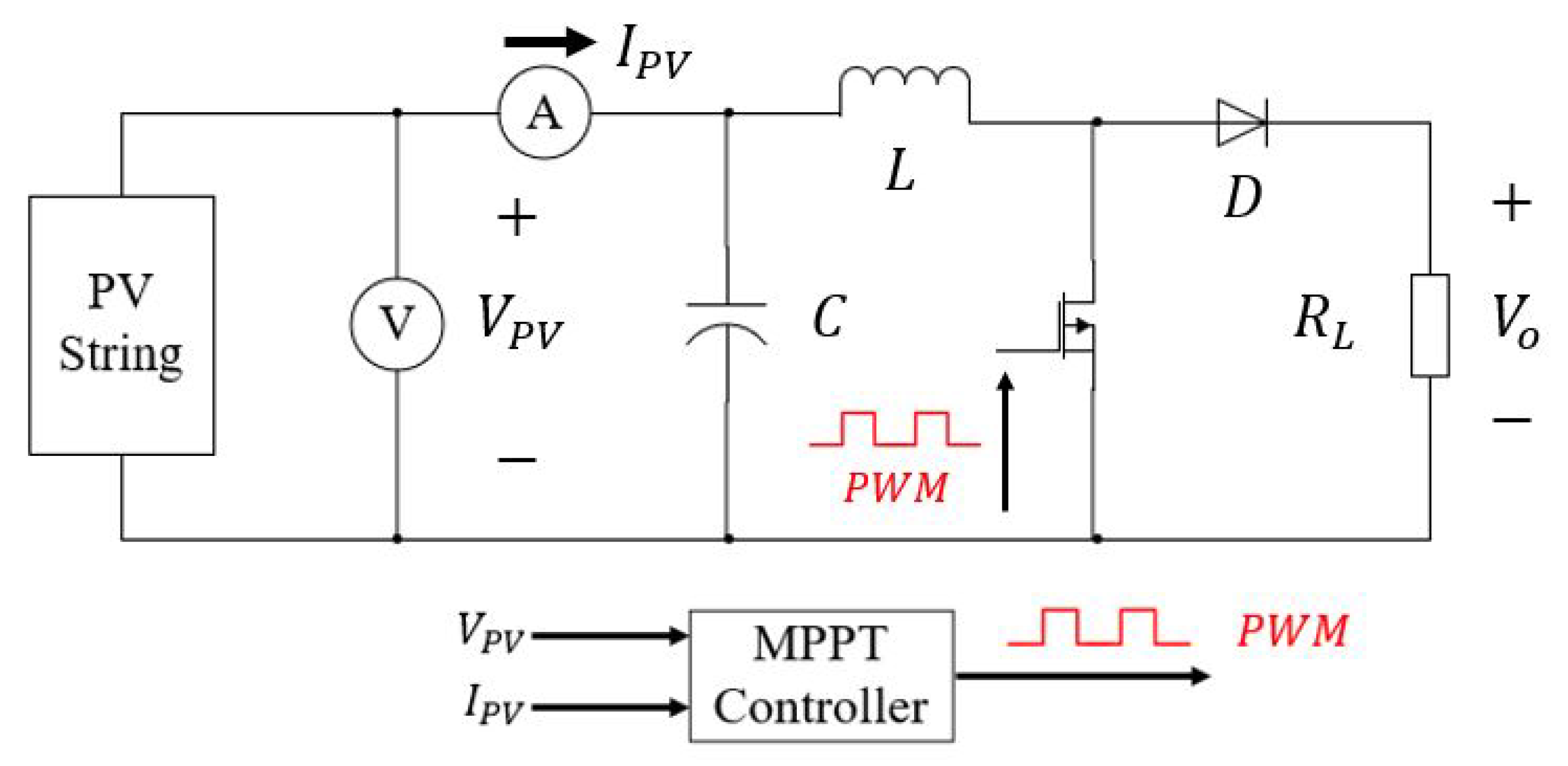
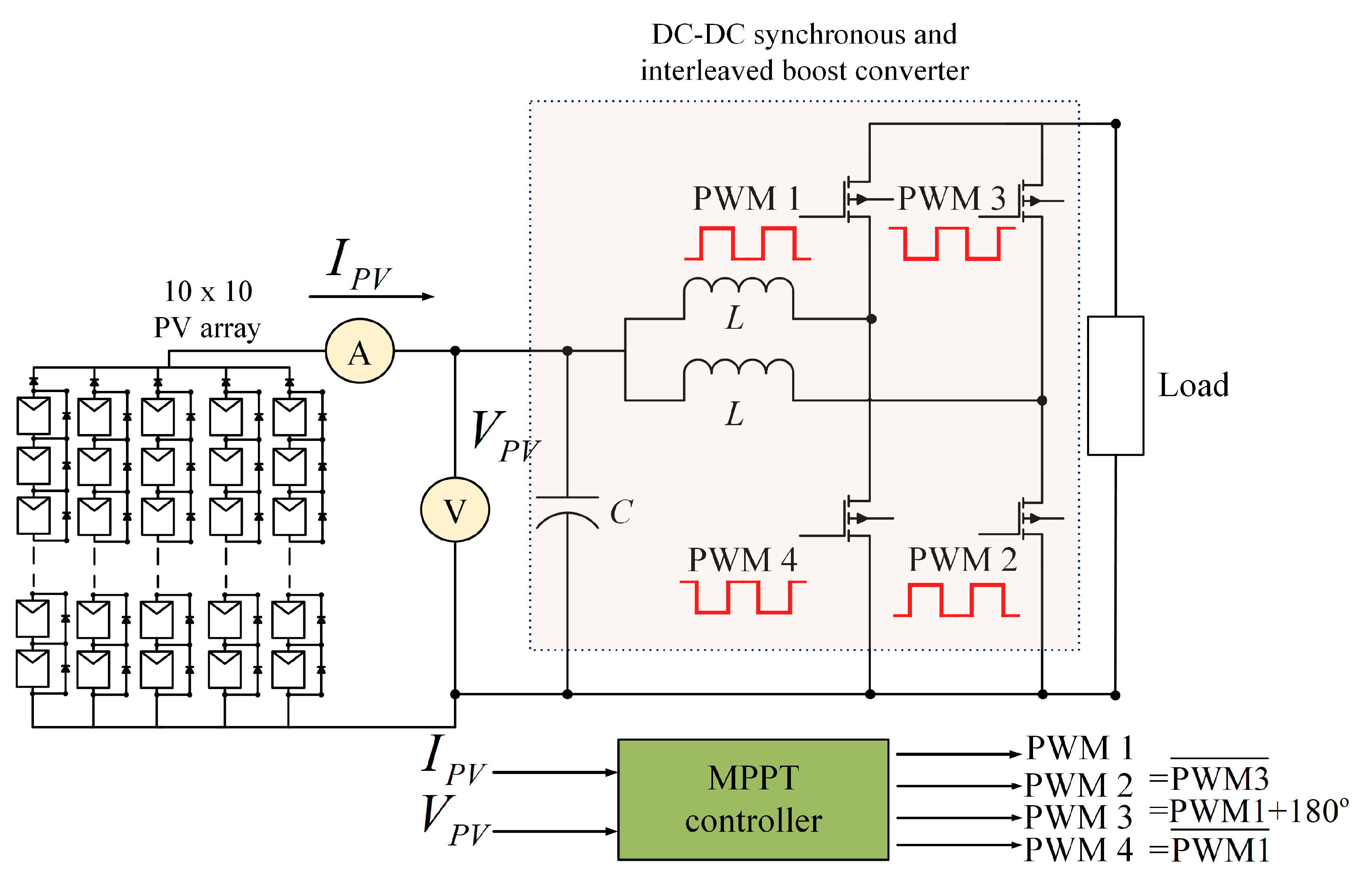
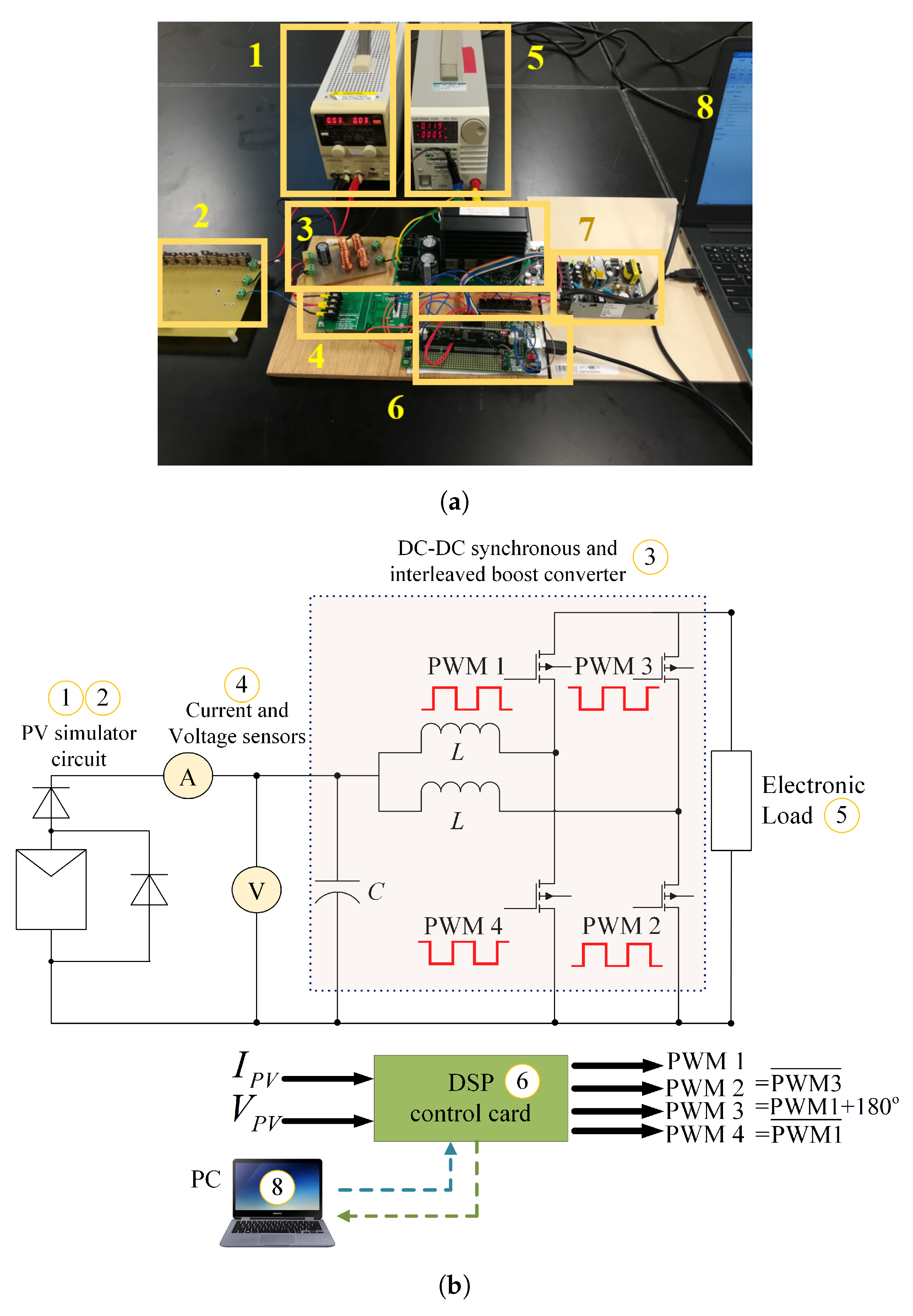
3.1. System Description
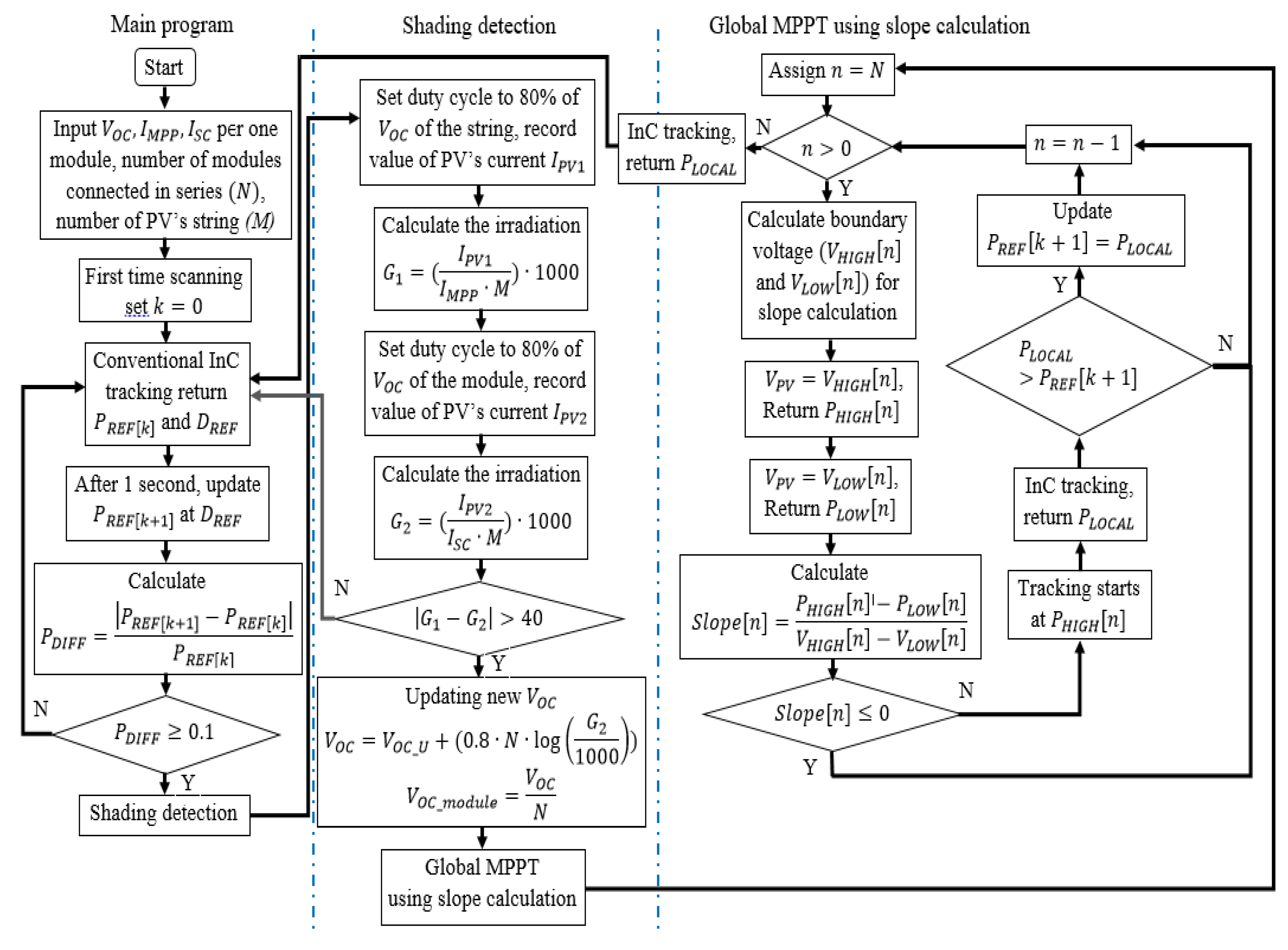
3.2. Proposed Global MPPT Algorithm
3.2.1. Main Program
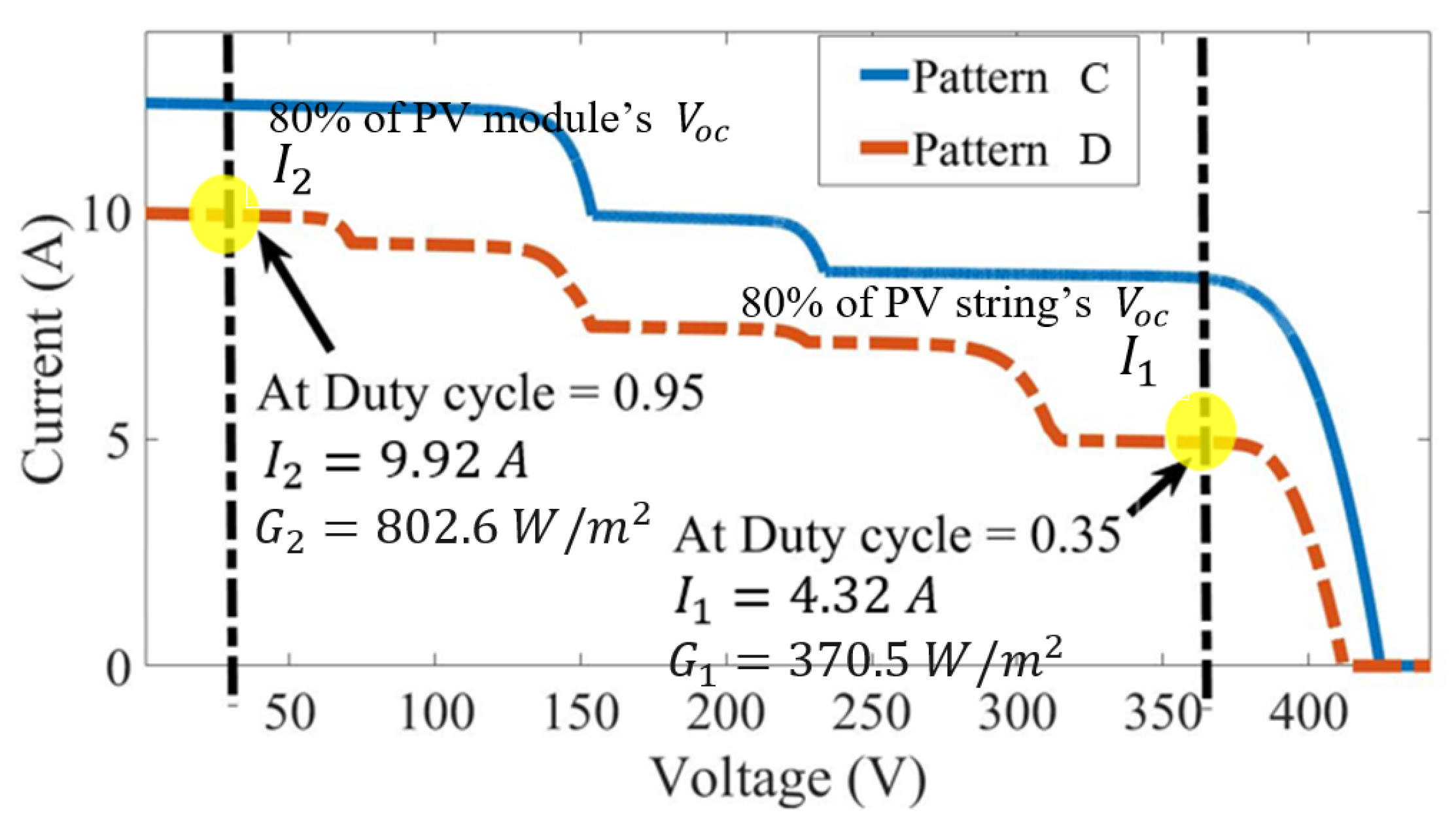
3.2.2. Shading Detection
3.2.3. Global MPPT Using Slope Calculation
3.2.4. Example
4. Simulation Results
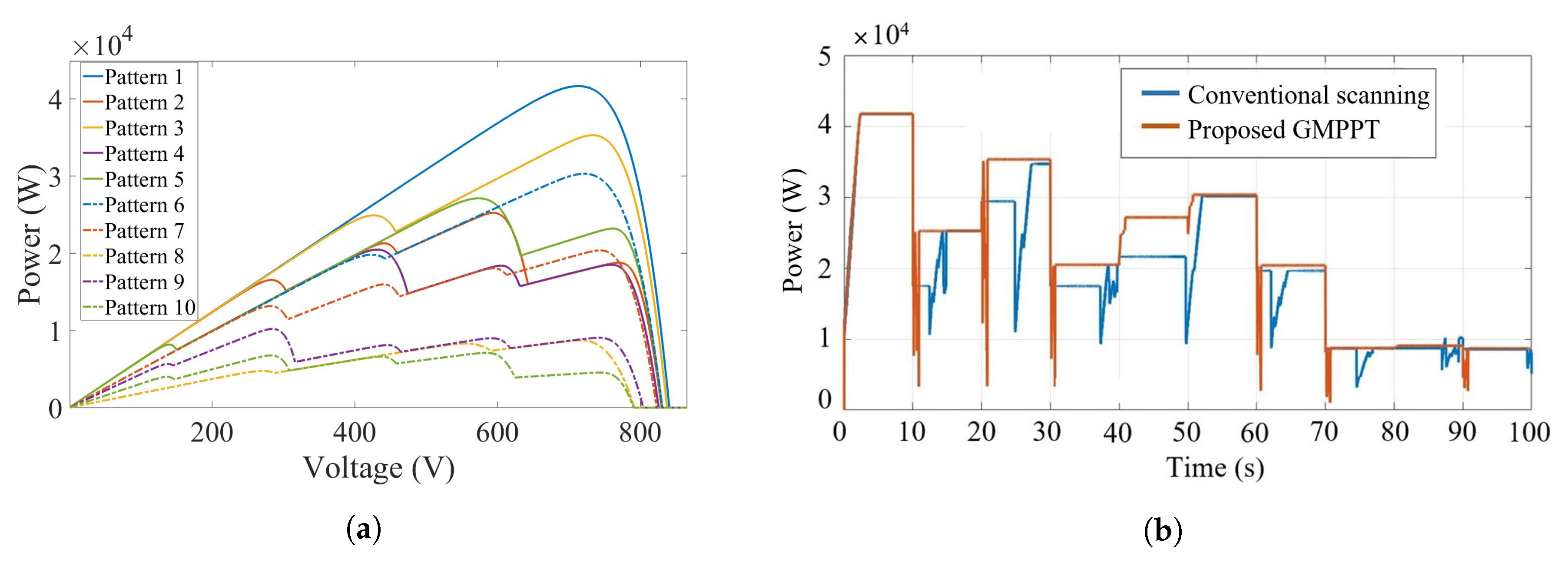
4.1. Short-Term Testing
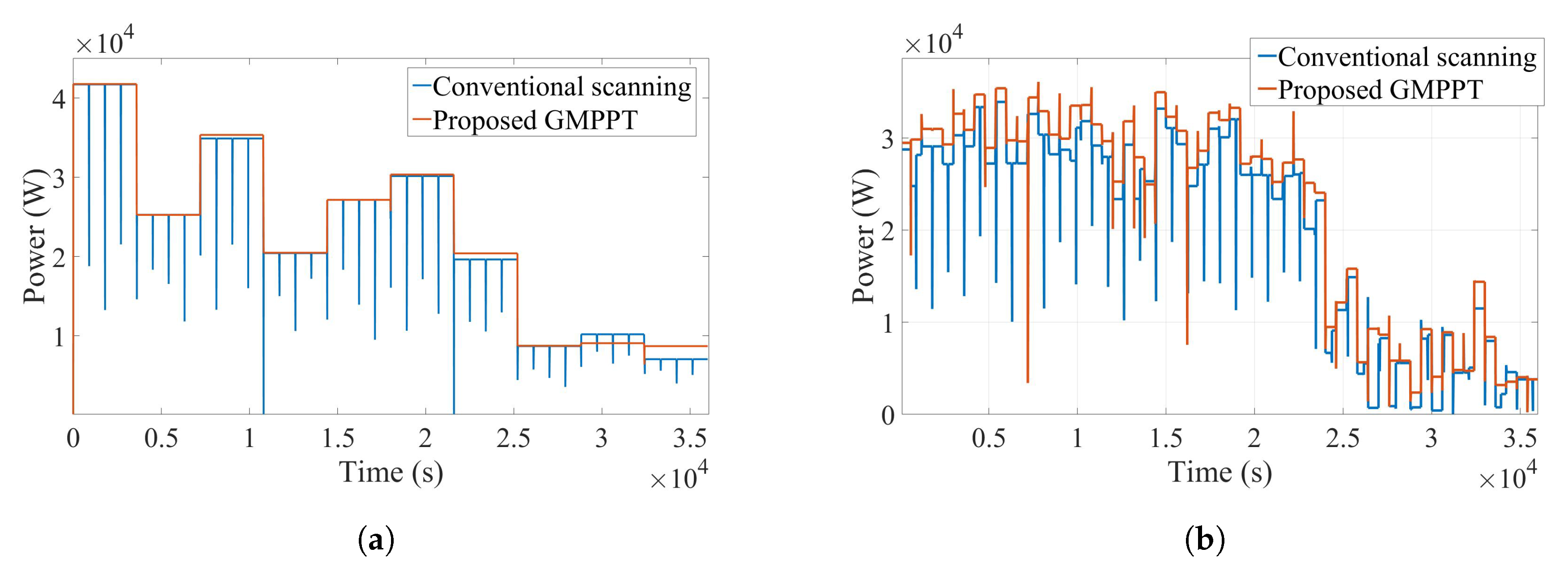
4.2. Long-term Testing
5. Experimental Results
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | Artificial neural network |
| d | Duty cycle |
| DSP | Digital signal processor |
| G | Irradiation |
| GMPPT | Global maximum power point tracking |
| I-V | Current–voltage |
| InC | Incremental conductance |
| JPY | Japanese Yen |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MOSFET | Metal-Oxide Semiconductor Field-Effect Transistor |
| MPP | Maximum power point |
| MPPT | Maximum power point tracking |
| P&O | Perturb and pbserve |
| P-V | Power–voltage |
| PSO | Particle swarm pptimization |
| PV | Photovoltaic |
| PWM | Pulse width modulation |
| SEPIC | Single-ended primary-inductor converter |
| STC | Standard test conditions |
| T | Temperature |
References
- Romero-Cadaval, E.; Spagnuolo, G.; Franquelo, L.G.; Ramos-Paja, C.A.; Suntio, T.; Xiao, W.M. Grid-Connected Photovoltaic Generation Plants: Components and Operation. IEEE Ind. Electron. Mag. 2013, 7, 6–20. [Google Scholar] [CrossRef]
- Patel, H.; Agarwal, V. MATLAB-Based Modeling to Study the Effects of Partial Shading on PV Array Characteristics. IEEE Trans. Energy Convers. 2008, 23, 302–310. [Google Scholar] [CrossRef]
- Femia, N.; Lisi, G.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Distributed maximum power point tracking of photovoltaic arrays: Novel approach and system analysis. IEEE Trans. Ind. Electron. 2008, 55, 2610–2621. [Google Scholar] [CrossRef]
- Gao, L.; Dougal, R.A.; Liu, S.; Iotova, A.P. Parallel-Connected Solar PV System to Address Partial and Rapidly Fluctuating Shadow Conditions. IEEE Trans. Ind. Electron. 2009, 56, 1548–1556. [Google Scholar]
- Eftichios, K. A New Technique for Tracking the Global Maximum Power Point of PV Arrays Operating Under Partial-Shading Conditions. IEEE J. Photovolt. 2012, 2, 184–190. [Google Scholar]
- Daraban, S.; Petreus, D.; Morel, C.; Machmoum, M. A novel global MPPT algorithm for distributed MPPT systems. In Proceedings of the 15th European Conference on Power Electronics and Applications (EPE), Lille, France, 2–6 September 2013; pp. 1–10. [Google Scholar]
- Pillai, D.S.; Rajasekar, N. A comprehensive review on protection challenges and fault diagnosis in PV systems. Renew. Sustain. Energy Rev. 2018, 18–40. [Google Scholar] [CrossRef]
- Veerachary, M. PSIM circuit-oriented simulator model for the nonlinear photovoltaic sources. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 735–740. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified Incremental Conductance Algorithm for Photovoltaic System Under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Electron. 2014, 61, 5384–5392. [Google Scholar]
- Ji, Y.; Jung, D.; Won, C.; Lee, B.; Kim, J. Maximum power point tracking method for PV array under partially shaded condition. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 307–312. [Google Scholar]
- Sera, D.; Mathe, L.; Kerekes, T.; Spataru, S.V.; Teodorescu, R. On the Perturb-and-Observe and Incremental Conductance MPPT Methods for PV Systems. IEEE J. Photovolt. 2013, 3, 1070–1078. [Google Scholar] [CrossRef]
- Nguyen, T.L.; Low, K. A Global Maximum Power Point Tracking Scheme Employing DIRECT Search Algorithm for Photovoltaic Systems. IIEEE Trans. Ind. Electron. 2010, 57, 3456–3467. [Google Scholar] [CrossRef]
- Malik, S. MPPT Schemes for PV System under Normal and Partial Shading Condition: A Review. Int. J. Renew. Energy Dev. 2016, 2, 79–94. [Google Scholar]
- Alik, R.; Jusoh, A.; Shukri, N.A. An improved perturb and observe checking algorithm MPPT for photovoltaic system under partial shading condition. In Proceedings of the IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 October 2015. [Google Scholar]
- Kapić, A.; Zečević, Ž.; Krstajić, B. An efficient MPPT algorithm for PV modules under partial shading and sudden change in irradiance. In Proceedings of the 23rd International Scientific-Professional Conference on Information Technology (IT), Zabljak, Montenegro, 19–24 February 2018. [Google Scholar]
- Duan, Q.; Leng, J.; Duan, P.; Hu, B.; Mao, M. An Improved Variable Step PO and Global Scanning MPPT Method for PV Systems under Partial Shading Condition. In Proceedings of the 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2015. [Google Scholar]
- Başoğlu, M.E.; Çakir, B. Experimental evaluations of global maximum power point tracking approaches in partial shading conditions. In Proceedings of the 2017 IEEE International Conference on Environment and Electrical Engineering and 2017 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Milan, Italy, 6–9 June 2017. [Google Scholar]
- Bidyadhar, S. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2013, 4, 89–97. [Google Scholar]
- Kinattigal, S. Enhanced Energy Output From a PV System Under Partial Shading Conditions through Artifical Bee Colony. IEEE Trans. Sustain. Energy 2015, 6, 198–209. [Google Scholar]
- Hiren, P. Maximum Power Point Tracking Scheme for PV Systems Operating under Partially Shaded Conditions. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar]
- Jubaer, A. An Enhanced Adaptive P&O MPPT for Fast and Efficient Tracking under Varying Environment. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar]
- Korey Sener, P. A New MPPT Method for PV Array System under Partially Shaded Conditions. In Proceedings of the 3rd International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 437–441. [Google Scholar]
- Kobayashi, K.; Takano, I.; Sawada, Y. A study on a two stage maximum power point tracking control of a photovoltaic system under partially shaded insolation conditions. In Proceedings of the IEEE Power Engineering Society General Meeting (IEEE Cat. No. 03CH37491), Toronto, ON, Canada, 13–17 July 2003; pp. 2612–2617. [Google Scholar]
- Irisawa, K.; Saito, T.; Takano, I.; Sawada, Y. Maximum power point tracking control of photovoltaic generation system under non-uniform insolation by means of monitoring cells. In Proceedings of the Conference Record of the Twenty-Eighth IEEE Photovoltaic Specialists Conference, Anchorage, AK, USA, 15–22 September 2000; pp. 1707–1710. [Google Scholar]
- Bekker, B.; Beukes, H.J. Finding an optimal PV panel maximum power point tracking method. In Proceedings of the 2004 IEEE Africon 7th Africon Conference in Africa, Gaborone, Botswana, 15–17 September 2004; pp. 1125–1129. [Google Scholar]
- Nguyen, D.; Lehman, B. An Adaptive Solar Photovoltaic Array Using Model-Based Reconfiguration Algorithm. IEEE Trans. Ind. Electron. 2008, 2644–2654. [Google Scholar] [CrossRef]
- Gules, R.; Pacheco, J.D.P.; Hey, H.L.; Imhoff, J. A Maximum Power Point Tracking System with Parallel Connection for PV Stand-Alone Applications. IEEE Trans. Ind. Electron. 2008, 55, 2674–2683. [Google Scholar] [CrossRef]
- Uno, M.; Kukita, A. Current sensorless single-switch voltage equalizer using multi-stacked buck-boost converters for photovoltaic modules under partial shading. In Proceedings of the 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia), Seoul, Korea, 1–5 June 2015; pp. 645–651. [Google Scholar]
- Yuan, X.; Yang, D.; Liu, H. MPPT of PV system under partial shading condition based on adaptive inertia weight particle swarm optimization algorithm. In Proceedings of the IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015. [Google Scholar]
- Miyatake, M.; Veerachary, M.; Toriumi, F.; Fujii, N.; Ko, H. Maximum Power Point Tracking of Multiple Photovoltaic Arrays: A PSO Approach. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 367–380. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z. A Deterministic Particle Swarm Optimization Maximum Power Point Tracker for Photovoltaic System under Partial Shading Condition. IEEE Trans. Ind. Electron. 2013, 60, 3195–3206. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)—Based MPPT for PV with Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Alajmi, B.N.; Ahmed, K.H.; Finney, S.J.; Williams, B.W. A Maximum Power Point Tracking Technique for Partially Shaded Photovoltaic Systems in Microgrids. IEEE Trans. Ind. Electron. 2013, 60, 1596–1606. [Google Scholar] [CrossRef]
- ABB. ABB UNO PVI-3.0-3.6-3.8-4.2-TL-OUTD-S-US (-A) Product Manual. ABB Sol. Invert. 2016. Available online: https://library.e.abb.com/public/5c56393f1c9c734185257cda007edfe3/PVI-3.0-3.6-3.8-4.2-TL-OUTD-S-US%20(-A)%20Product%20manual.pdf (accessed on 12 October 2018).
- SMA, Sunny Boy 3000TL/3600TL/4000TL/5000TL Product manual. SMA Sol. Invert. 2016. Available online: http://files.sma.de/dl/15330/SB30-50TL-21-BE-en-11.pdf (accessed on 12 October 2018).
- Lyden, S.; Haque, M.E.; Gargoom, A.; Negnevitsky, M. Review of Maximum Power Point Tracking approaches suitable for PV systems under Partial Shading Conditions. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 September–3 October 2013; pp. 1–6. [Google Scholar]
- Bastidas-Rodriguez, J.D.; Franco, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. Maximum power point tracking architectures for photovoltaic systems in mismatching conditions: A review. IET Power Electron. 2014, 7, 1396–1413. [Google Scholar] [CrossRef]
- Karim, D. Backstepping sliding mode control for maximum power point tracking of a photovoltaic system. Electr. Power Syst. Res. 2017, 143, 182–188. [Google Scholar]
- Alireza, R. Global Maximum Power Point Tracking Method for Photovoltaic Arrays under Partial Shading Conditions. IEEE Trans. Ind. Electron. 2017, 64, 2855–2864. [Google Scholar]
- Moballegh, S.; Jiang, J. Modeling, Prediction, and Experimental Validations of Power Peaks of PV Arrays under Partial Shading Conditions. IEEE Trans. Sustain. Energy 2014, 5, 293–300. [Google Scholar] [CrossRef]
- Mohammad Amin, G. Partial Shading Detection and Smooth Maximum Power Point Tracking of PV Arrays under PSC. IEEE Trans. Power Electron. 2016, 31, 6281–6292. [Google Scholar]
- Wang, Y. High-Accuracy and Fast-Speed MPPT Methods for PV String under Partially Shaded Conditions. IEEE Trans. Ind. Electron. 2016, 63, 235–245. [Google Scholar] [CrossRef]
- Ahmed, J. An accurate method for MPPT algorithm to detect the Partial shading Occurrence in a PV system. IEEE Trans. Ind. Inform. 2017, 13, 2151–2161. [Google Scholar] [CrossRef]
- Kim, R.-Y. An improved global maximum power point tracking scheme under partial shading conditions. J. Int. Conf. Electr. Mach. Syst. 2013, 2, 65–68. [Google Scholar] [CrossRef]
- Yi-Hwa, L. A particle swarm optimization-based maximum power point tracking algorithm for PV systems operating under partially shaded conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar]
- Seyedmahmoudian, M. Simulation and hardware implementation of new maximum power point tracking technique for partially shaded PV system using hybrid DEPSO method. IEEE Trans. Sustain. Energy 2015, 6, 850–862. [Google Scholar] [CrossRef]
- Carrasco, M.; Laudani, A.; Lozito, G.M.; Mancilla-David, F.; Riganti Fulginei, F.; Salvini, A. Low-Cost Solar Irradiance Sensing for PV Systems. Energies 2017, 10, 998. [Google Scholar] [CrossRef]
- Huang, H.; Xu, J.; Peng, Z.; Yoo, S.; Yu, D.; Huang, D.; Qin, H. Cloud motion estimation for short term solar irradiation prediction. In Proceedings of the 2013 IEEE International Conference on Smart Grid Communications (SmartGridComm), Vancouver, BC, Canada, 21–24 October 2013. [Google Scholar]
- Gosumbonggot, J.; Nguyen, D.D.; Fujita, G. Partial Shading and Global Maximum Power Point Detection Enhancing MPPT for Photovoltaic Systems Operated in Shading Condition. In Proceedings of the 53rd International Universities Power Engineering Conference (UPEC), Glasgow City, UK, 4–7 September 2018. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | PV Module’s Specification | Irradiation Pattern | per Module |
|---|---|---|---|
| Case 1 | Canadian Solar Cs5C-90M | A | 22.20 |
| Case 2 | B | 21.24 | |
| Case 3 | Trina Solar TSM-170D | A | 43.60 |
| Case 4 | B | 41.72 | |
| Case 5 | Jinko Solar JKM310M-72 | A | 47.10 |
| Case 6 | B | 44.90 |
| Parameters | Value |
|---|---|
| Maximum power | 425 W |
| Current at maximum power | 5.83 A |
| Voltage at maximum power | 72.9 V |
| Short-circuit current | 6.18 A |
| Open-circuit voltage | 85.6 V |
| Voltage Temperature coefficient | −0.36099 (%/°C) |
| Current Temperature coefficient | 0.102 (%/°C) |
| Region | Reference Data | Slope | Decision | Power Tracked | |||
|---|---|---|---|---|---|---|---|
| 1 | 527.69 | 43.56 | 568.20 | 47.83 | 9.48 | Not detected | - |
| 2 | 1220.00 | 128.98 | 1230.00 | 138.00 | 1.11 | Not detected | - |
| 3 | 1570.00 | 215.12 | 1560.00 | 219.18 | −1.96 | Detected | 1570.00 |
| 4 | 1700.00 | 296.30 | 1680.00 | 300.36 | −5.37 | Detected | 1710.00 |
| 5 | 8.21 | 381.54 | 3.45 | 385.60 | −1.17 | Detected | 1640.20 |
| Shading Pattern | Tracking Method | Power | Tracking Speed | Maximum Power from P-V Curve | Efficiency (%) |
|---|---|---|---|---|---|
| 1 | Conventional scanning | 41.67 | 2.35 | 41.75 | 99.81 |
| Proposed GMPPT | 41.72 | 2.33 | 99.93 | ||
| 2 | Conventional scanning | 25.24 | 2.49 | 25.26 | 99.92 |
| Proposed GMPPT | 25.25 | 0.91 | 99.96 | ||
| 3 | Conventional scanning | 34.71 | 2.57 | 35.36 | 98.16 |
| Proposed GMPPT | 35.33 | 0.87 | 99.92 | ||
| 4 | Conventional scanning | 17.42 | 2.06 | 20.48 | 85.06 |
| Proposed GMPPT | 20.47 | 0.71 | 99.95 | ||
| 5 | Conventional scanning | 21.61 | 2.79 | 27.14 | 79.62 |
| Proposed GMPPT | 27.12 | 0.91 | 99.93 | ||
| 6 | Conventional scanning | 30.10 | 2.41 | 30.37 | 99.11 |
| Proposed GMPPT | 30.34 | 0.77 | 99.90 | ||
| 7 | Conventional scanning | 19.63 | 3.39 | 20.39 | 96.27 |
| Proposed GMPPT | 20.38 | 0.56 | 99.95 | ||
| 8 | Conventional scanning | 8.87 | 2.65 | 8.90 | 99.66 |
| Proposed GMPPT | 8.73 | 0.74 | 98.09 | ||
| 9 | Conventional scanning | 10.17 | 2.10 | 10.19 | 99.80 |
| Proposed GMPPT | 9.05 | 0.71 | 88.81 | ||
| 10 | Conventional scanning | 8.59 | 2.60 | 8.71 | 98.62 |
| Proposed GMPPT | 8.69 | 0.78 | 99.77 |
| Weather Condition | Tracking Method | Energy Extracted per Day | Annual Energy | Revenue in JPY | Additional Income in JPY |
|---|---|---|---|---|---|
| Steady change | Conventional scanning | 224.83 | 82,062 | 1,641,259 | - |
| Proposed GMPPT | 227.18 | 82,921 | 1,658,418 | 17,159 | |
| Rapid change | Conventional scanning | 206.51 | 75,376 | 1,507,520 | - |
| Proposed GMPPT | 224.16 | 81,818 | 1,636,360 | 128,840 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gosumbonggot, J.; Fujita, G. Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photovoltaic with the Variation of Irradiation and Temperature. Energies 2019, 12, 202. https://doi.org/10.3390/en12020202
Gosumbonggot J, Fujita G. Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photovoltaic with the Variation of Irradiation and Temperature. Energies. 2019; 12(2):202. https://doi.org/10.3390/en12020202
Chicago/Turabian StyleGosumbonggot, Jirada, and Goro Fujita. 2019. "Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photovoltaic with the Variation of Irradiation and Temperature" Energies 12, no. 2: 202. https://doi.org/10.3390/en12020202
APA StyleGosumbonggot, J., & Fujita, G. (2019). Partial Shading Detection and Global Maximum Power Point Tracking Algorithm for Photovoltaic with the Variation of Irradiation and Temperature. Energies, 12(2), 202. https://doi.org/10.3390/en12020202