Adaptive Sliding Mode Trajectory Tracking Control for WMR Considering Skidding and Slipping via Extended State Observer


Abstract
1. Introduction
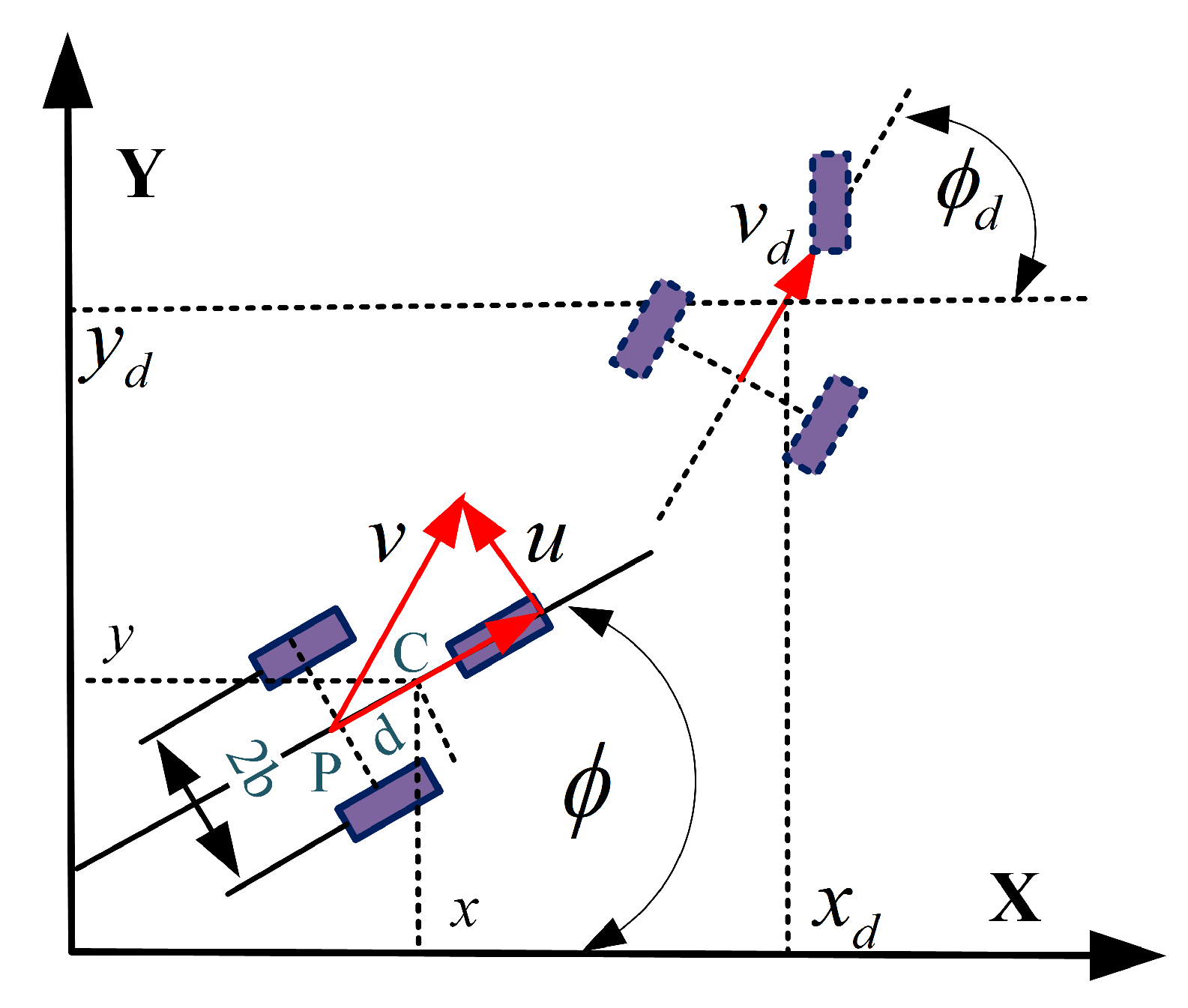
2. Problem Formulation and Preliminaries
3. Tracking Problem for a Nonholonomic WMR
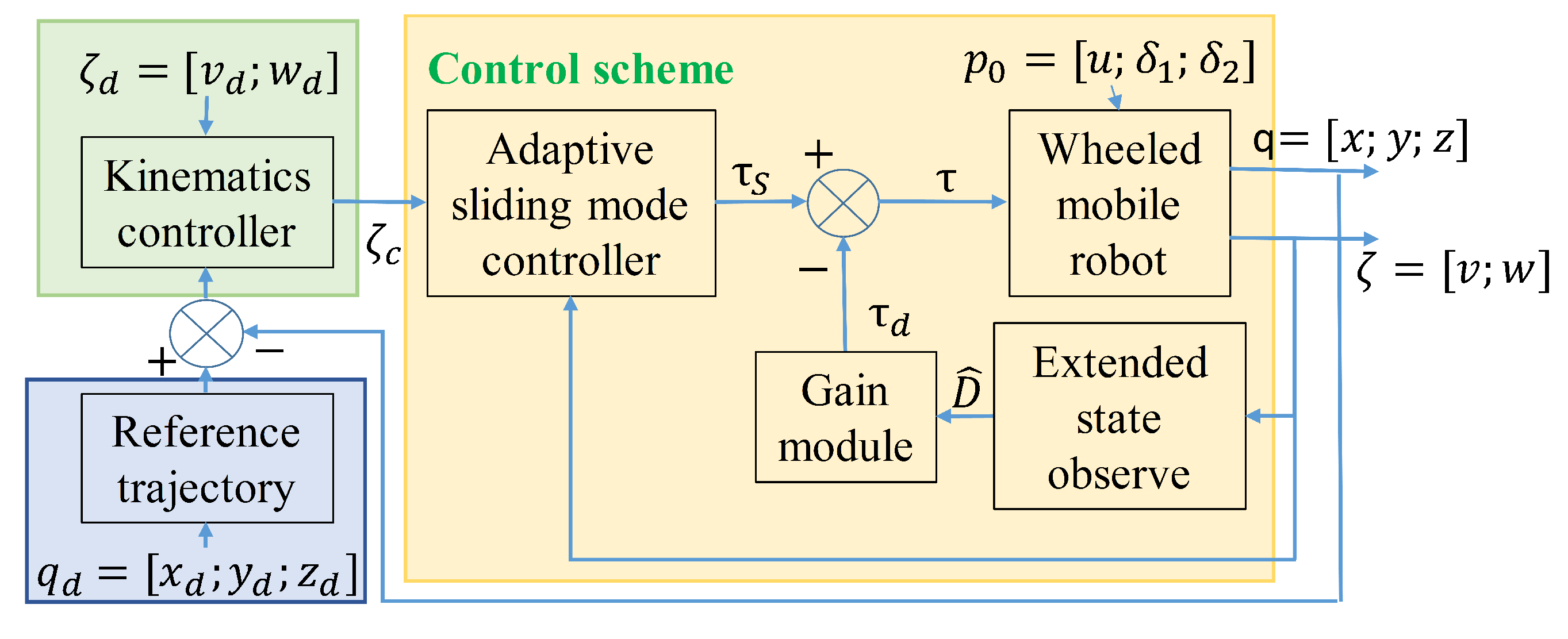
4. Controller Design and Stability Analysis
4.1. Design of the Extended State Observer (ESO)
4.2. Design of the Adaptive Sliding Mode Controller
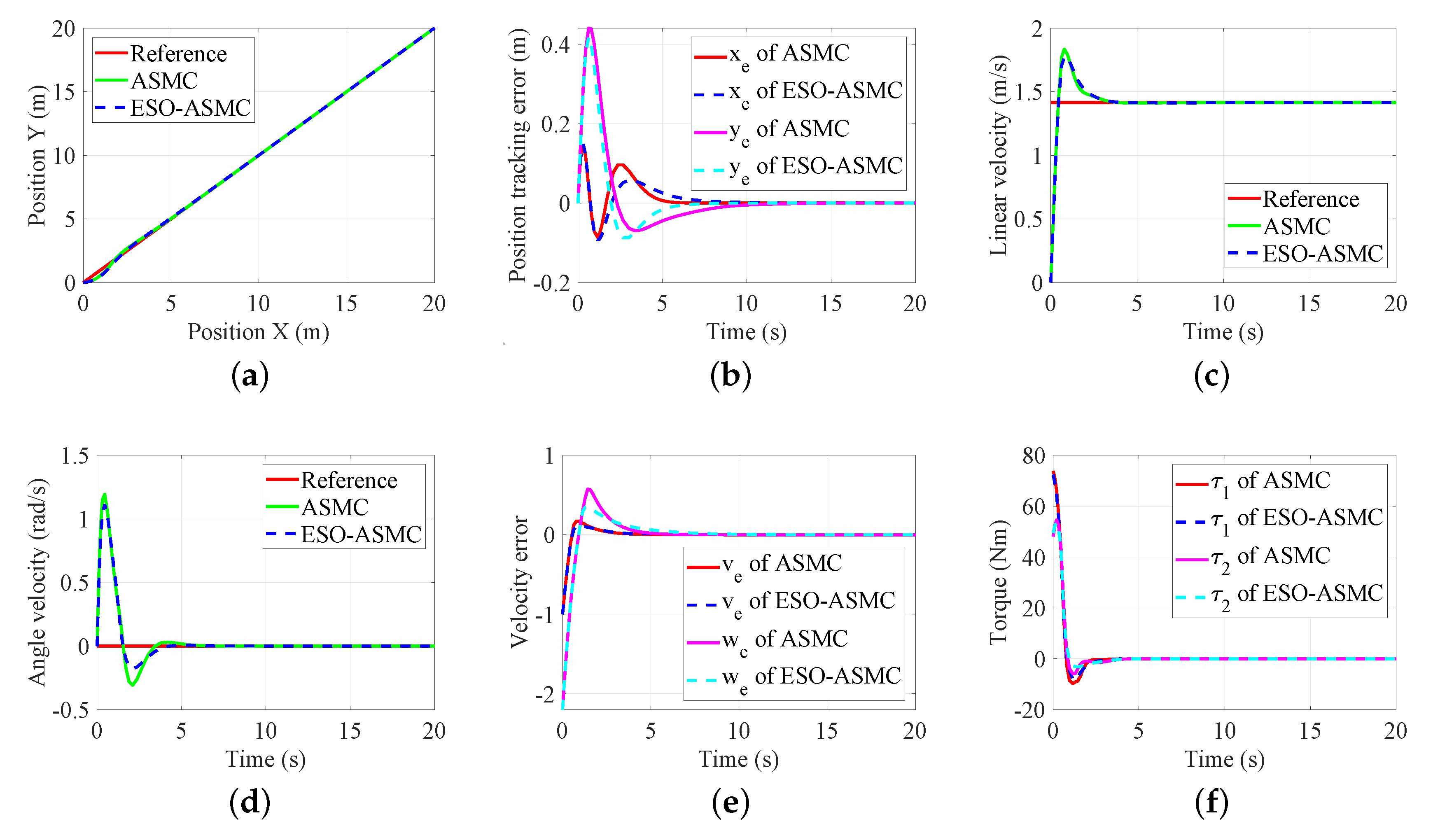
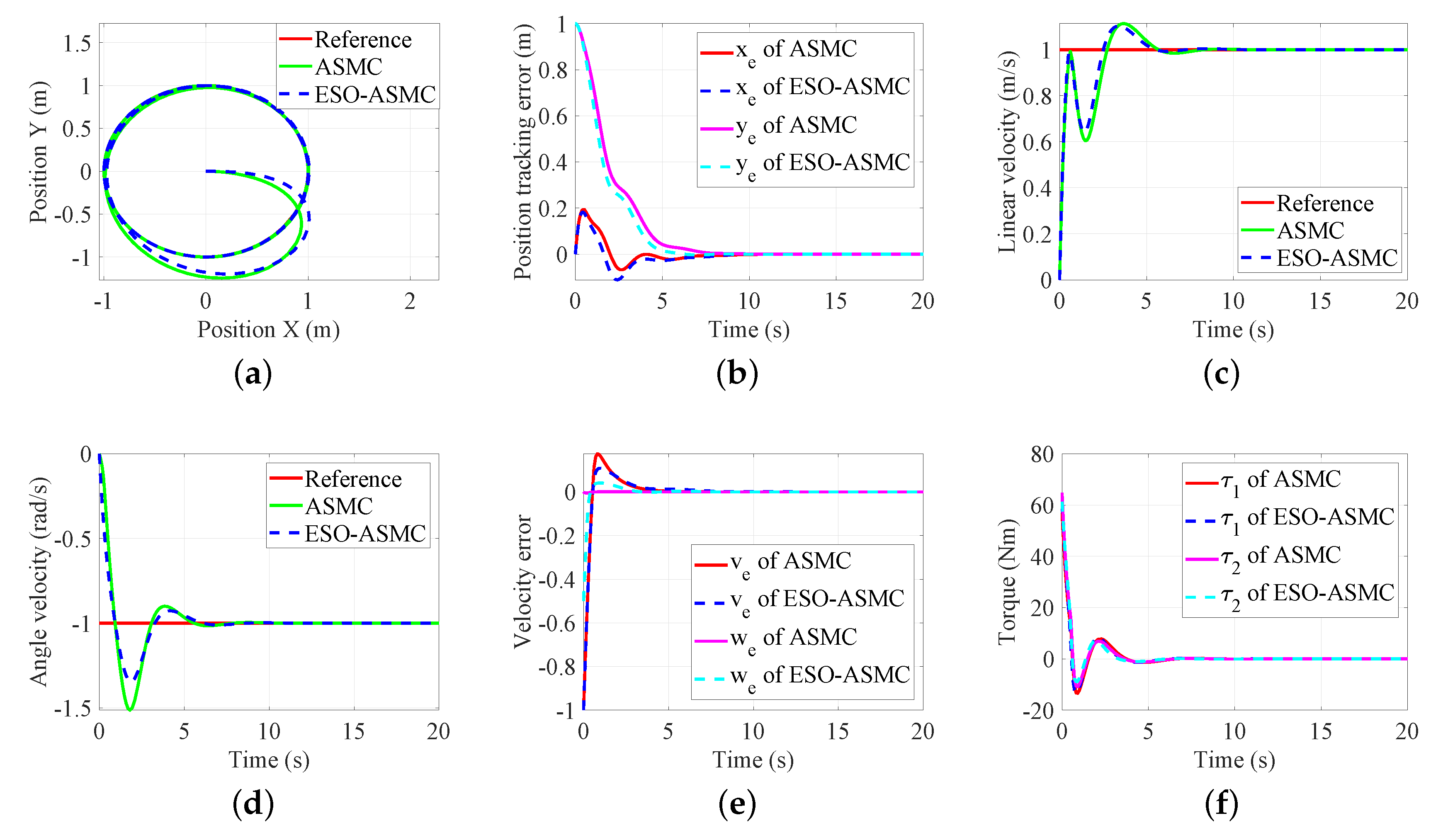
5. Simulation
6. Experiment
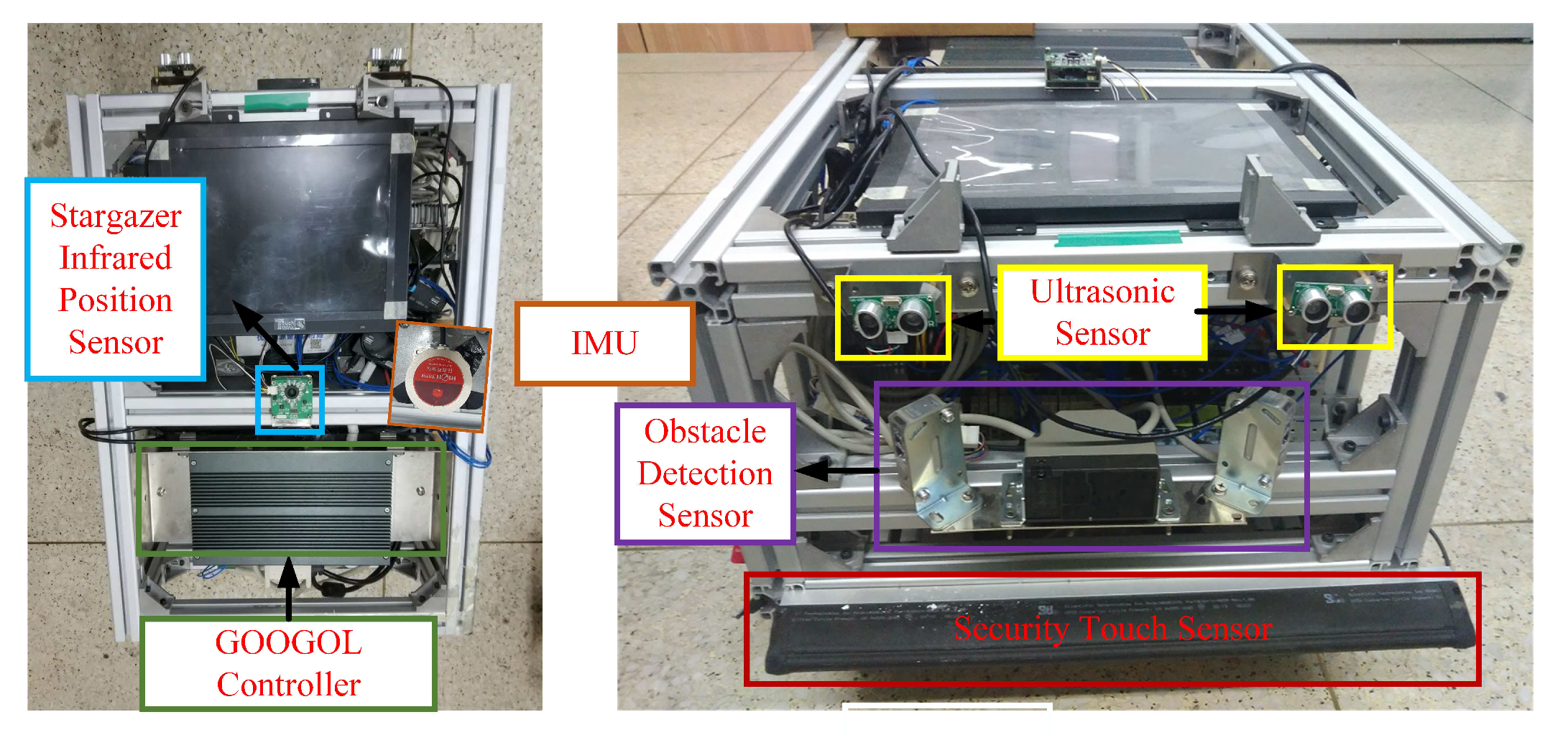
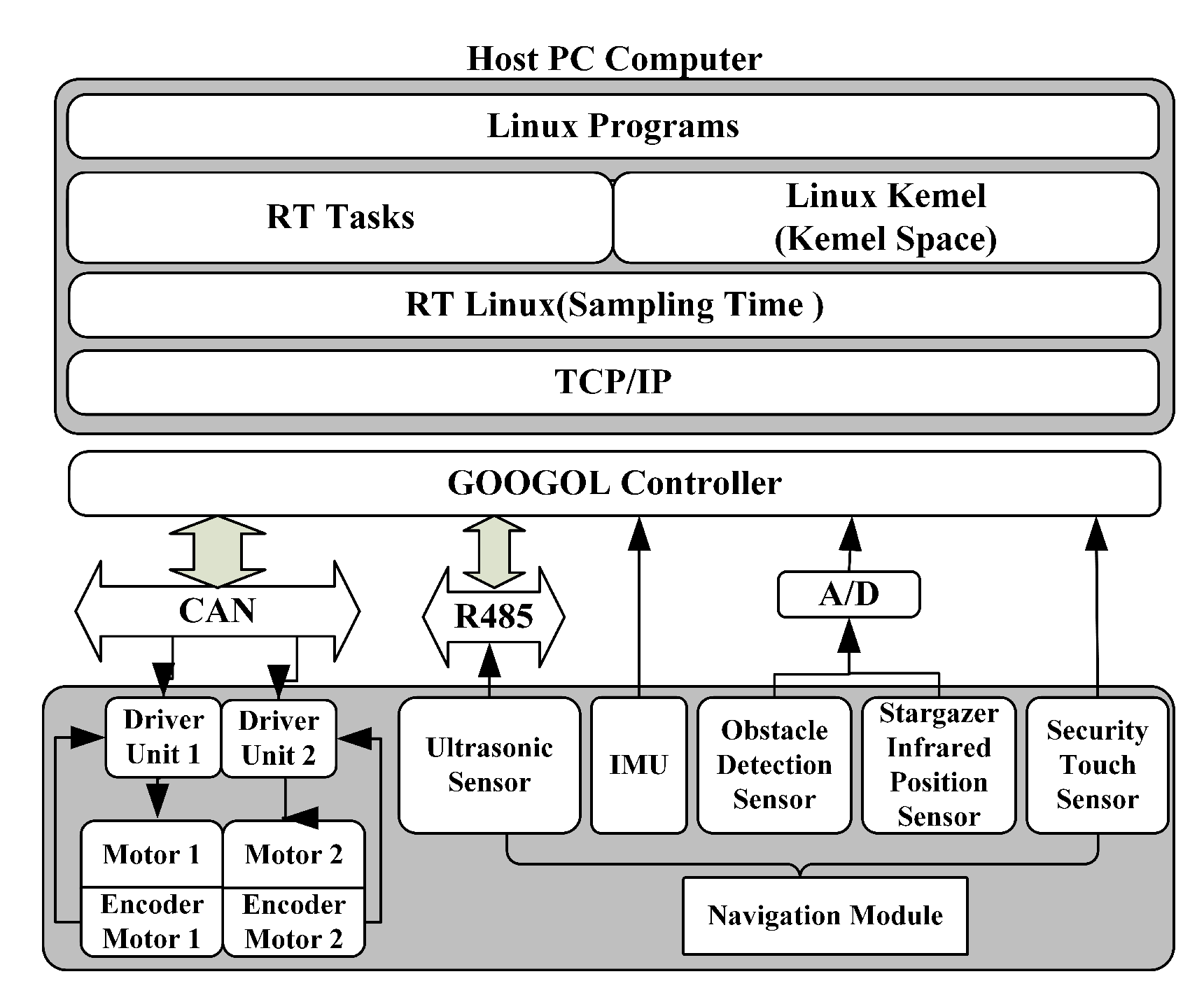
6.1. Experimental Setup
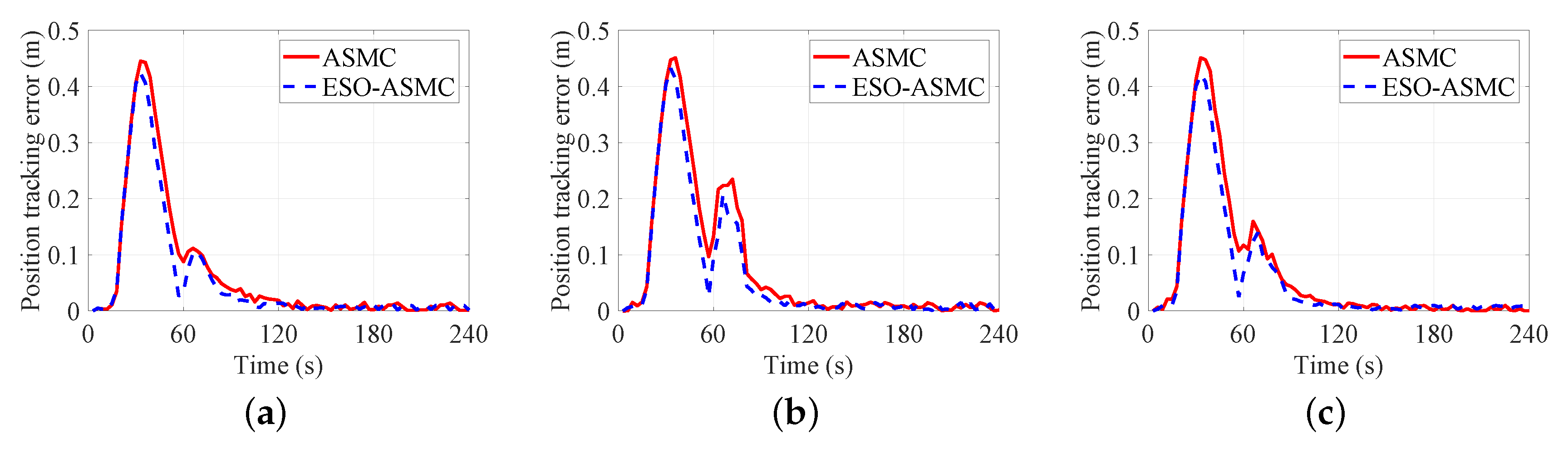
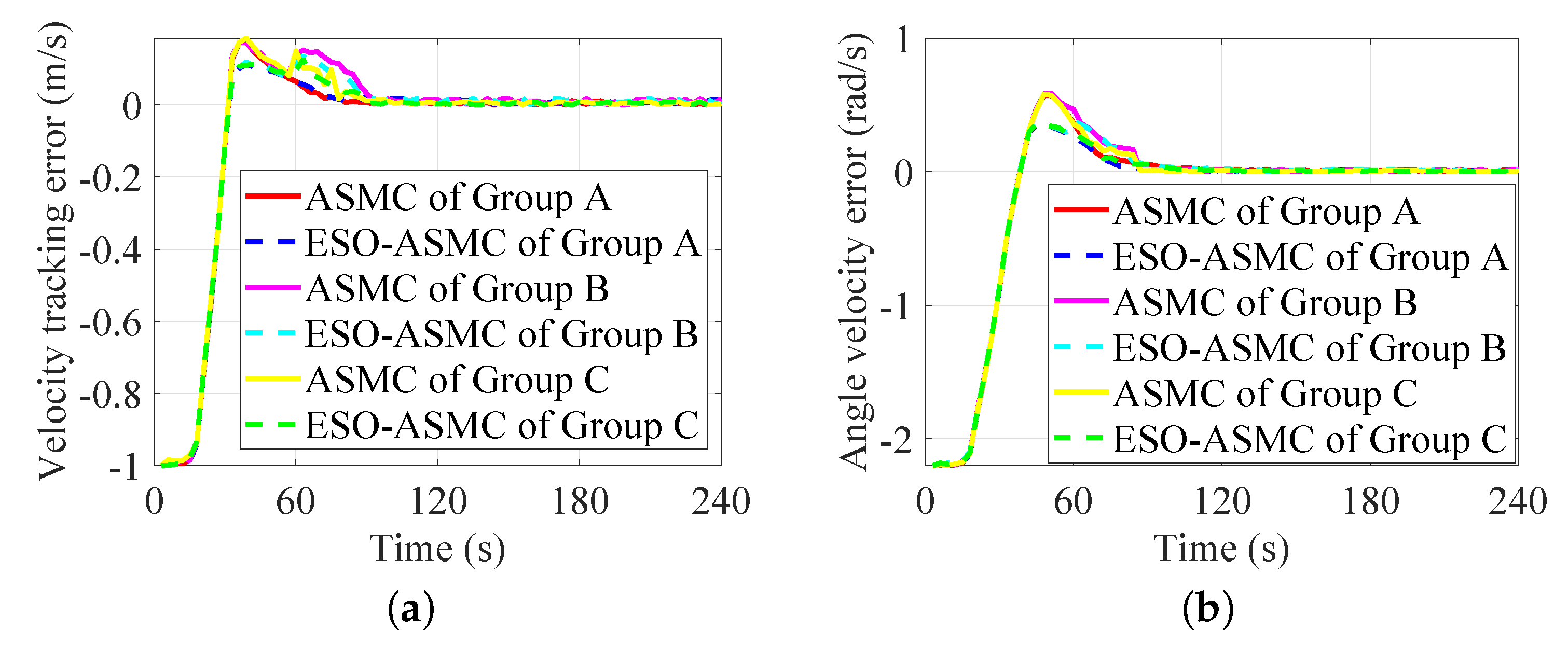
6.2. Experimental Results and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| WMR | wheeled mobile robot |
| ASMC | adaptive sliding mode controller |
| ESO | extended state observer |
| RMSE | root mean square error |
Appendix A
- Considering , define , andThe estimation error of can be rewritten aswhere. The characteristic equation of Equation (A1)Based on Routh criterion, if the andwe can get the Equation (A2) is Hurwitz. Therefore positive definite matrix and satisfyFurthermore, let , and , we getwhere . If is appropriately chosen, we get .The Lyapunov function is expressed asThe time derivative of is given bywhereand and denotes the min and max characteristic root. If and meet , we get . And
- Considering , the same as , then, Equation (A1) can be rewriten asAlso selecting Lyapunov function , we can get: If the parameter satisfies the inequality of , The conclusion of Equation (A7) can also be drawn and proved. □
References
- Pandey, A. Mobile Robot Navigation in Static and Dynamic Environments using Various Soft Computing Techniques. Ph.D. Thesis, National Institute of Technology Rourkela, Rourkela, India, July 2016. [Google Scholar]
- Terakawa, T.; Komori, M.; Matsuda, K.; Mikami, S. A novel omnidirectional mobile robot with wheels connected by passive sliding joints. IEEE/ASME Trans. Mechatron. 2018, 23, 1716–1727. [Google Scholar] [CrossRef]
- Kretzschmar, H.; Spies, M.; Sprunk, C.; Burgard, W. Socially compliant mobile robot navigation via inverse reinforcement learning. Int. J. Robot. Res. 2016, 35, 1289–1307. [Google Scholar] [CrossRef]
- Quillen, P.; Subbarao, K.; Munoz, J. Guidance and control of a mobile robot via numerical navigation functions and backstepping for planetary exploration missions. In Proceedings of the 2016 AIAA SPACE, Long Beach, CA, USA, 13–16 September 2016. [Google Scholar]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Wu, D.; Cheng, Y.; Du, H.; Zhu, W.; Zhu, M. Finite-time output feedback tracking control for a nonholonomic wheeled mobile robot. Aerosp. Sci. Technol. 2018, 78, 574–579. [Google Scholar] [CrossRef]
- Chen, J.; Chen, W.E.; Dawson, M.; McIntyre, M. Homography-based visual servo tracking control of a wheeled mobile robot. IEEE Trans. Robot. 2006, 22, 406–415. [Google Scholar] [CrossRef]
- Mirzaeinejad, H.; Shafei, A.M. Modeling and trajectory tracking control of a two-wheeled mobile robot: Gibbs-Appell and prediction-based approaches. Robotica 2018, 36, 1551–1570. [Google Scholar] [CrossRef]
- Esmaeili, N.; Alfi, A.; Khosravi, H. Balancing and trajectory tracking of two-wheeled mobile robot using backstepping sliding mode control: Design and experiments. J. Intell. Robot. Syst. 2017, 87, 601–613. [Google Scholar] [CrossRef]
- Asif, M.; Khan, M.J.; Cai, N. Adaptive sliding mode dynamic controller with integrator in the loop for nonholonomic wheeled mobile robot trajectory tracking. Int. J. Control 2014, 87, 964–975. [Google Scholar] [CrossRef]
- Peng, S.; Shi, W. Adaptive fuzzy integral terminal sliding mode control of a nonholonomic wheeled mobile robot. Math. Probl. Eng. 2017, 2017, 1–12. [Google Scholar] [CrossRef]
- Ding, L.; Li, S.; Gao, H.; Chen, C.; Deng, Z. Adaptive partial reinforcement learning neural network-based tracking control for wheeled mobile robotic systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 1–12. [Google Scholar] [CrossRef]
- Yang, H.; Fan, X.; Shi, P.; Hua, C.C. Nonlinear control for tracking and obstacle avoidance of a wheeled mobile robot with nonholonomic constraint. IEEE Trans. Control Syst. Technol. 2016, 24, 741–746. [Google Scholar] [CrossRef]
- Huang, D.; Zhai, J.; Ai, W.; Fei, S. Disturbance observer-based robust control for trajectory tracking of wheeled mobile robots. Neurocomputing 2016, 198, 74–79. [Google Scholar] [CrossRef]
- Hwang, E.J.; Kang, H.S.; Hyun, C.H.; Park, M. Robust backstepping control based on a Lyapunov redesign for skid-steered wheeled mobile robots. Int. J. Adv. Robot. Syst. 2013, 10, 26. [Google Scholar] [CrossRef]
- Wang, D.; Low, C.B. Modeling and analysis of skidding and slipping in wheeled mobile robots: Control design perspective. IEEE Trans. Robot. 2008, 24, 676–687. [Google Scholar] [CrossRef]
- Low, C.B.; Wang, D. GPS-based path following control for a car-like wheeled mobile robot with skidding and slipping. IEEE Trans. Control Syst. Technol. 2008, 16, 340–347. [Google Scholar]
- Low, C.B.; Wang, D. GPS-based tracking control for a car-like wheeled mobile robot with skidding and slipping. IEEE/ASME Trans. Mechatron. 2008, 13, 480–484. [Google Scholar]
- Dixon, W.E.; Dawson, D.M.; Zergeroglu, E. Robust control of a mobile robot system with kinematic disturbances. In Proceedings of the IEEE International Conference on Control Applications, Anchorage, AK, USA, 27 September 2000; pp. 437–442. [Google Scholar]
- Gonzalez, R.; Fiacchini, M.; Alamo, T.; Guzman, J.L.; Rodriguez, F. Adaptive control for a mobile robot under slip conditions using an LMI-based approach. Eur. J. Control 2010, 16, 144–155. [Google Scholar] [CrossRef]
- Cui, M.; Sun, D.; Liu, W.; Zhao, M.; Liao, X. Adaptive tracking and obstacle avoidance control for mobile robots with unknown sliding. Int. J. Adv. Robot. Syst. 2012, 9, 171. [Google Scholar] [CrossRef]
- Gao, H.; Song, X.; Ding, L.; Xia, K.; Li, N.; Deng, Z. Adaptive motion control of wheeled mobile robot with unknown slippage. Int. J. Control 2014, 87, 1513–1522. [Google Scholar] [CrossRef]
- Li, S.; Ding, L.; Gao, H.; Chen, C.; Liu, Z.; Deng, Z. Adaptive neural network tracking control-based reinforcement learning for wheeled mobile robots with skidding and slipping. Neurocomputing 2018, 283, 20–30. [Google Scholar] [CrossRef]
- Chen, M. Disturbance attenuation tracking control for wheeled mobile robots with skidding and slipping. IEEE Trans. Ind. Electron. 2016, 64, 3359–3368. [Google Scholar] [CrossRef]
- Kang, H.S.; Kim, Y.T.; Hyun, C.H.; Park, M. Generalized extended state observer approach to robust tracking control for wheeled mobile robot with skidding and slipping. Int. J. Adv. Robot. Syst. 2013, 10, 155. [Google Scholar] [CrossRef]
- Kang, H.S.; Hyun, C.H.; Kim, S. Robust tracking control using fuzzy disturbance observer for wheeled mobile robots with skidding and slipping. Int. J. Adv. Robot. Syst. 2014, 11, 75. [Google Scholar] [CrossRef]
- Chen, C.; Gao, H.; Ding, L.; Li, W.; Yu, H.; Deng, Z. Trajectory tracking control of WMRs with lateral and longitudinal slippage based on active disturbance rejection control. Robot. Auton. Syst. 2018, 107, 236–245. [Google Scholar] [CrossRef]
- Ding, Z. Consensus disturbance rejection with disturbance observers. IEEE Trans. Ind. Electron. 2015, 62, 5829–5837. [Google Scholar] [CrossRef]
- Xu, B. Disturbance observer-based dynamic surface control of transport aircraft with continuous heavy cargo airdrop. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 161–170. [Google Scholar] [CrossRef]
- Jingqing, H. The extended state observer of a class of uncertain systems. Control Decis. 1995, 10, 85–88. [Google Scholar]
- Chen, W.H.; Yang, J.; Guo, L.; Li, S. Disturbance-observer-based control and related methods-An overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef]
- Castillo, A.; Garcia, P.; Sanz, R.; Albertos, P. Enhanced extended state observer-based control for systems with mismatched uncertainties and disturbances. ISA Trans. 2018, 73, 1–10. [Google Scholar] [CrossRef]
- Mallavalli, S.; Fekih, A. Adaptive fault tolerant control design for actuator fault mitigation in quadrotor UAVs. In Proceedings of the IEEE Conference on Control Technology and Applications, Copenhagen, Denmark, 21–24 August 2018; pp. 193–198. [Google Scholar]
- Huang, Y.J.; Kuo, T.C.; Chang, S.H. Adaptive sliding-mode control for nonlinearsystems with uncertain parameters. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 534–539. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value | Units |
|---|---|---|---|
| Mass of the WMR platform | m | 76. | Kg |
| Moment of inertia of WMR | I | 4.8 | |
| Moment of inertia of driving wheel | Ic | 0.00072 | |
| Radius of the driving wheel | r | 0.06 | m |
| Half distance between the two driving wheels | b | 0.20 | m |
| Distance between the point C and P | d | 0.18 | m |
| Trajectory in x axis | Trajectory in y axis | Linear Velocity | Angular Velocity |
|---|---|---|---|
| Model | RMSE (m) | Max Error (m) | Min Error (m) | |||
|---|---|---|---|---|---|---|
| ASMC | ESO-ASMC | ASMC | ESO-ASMC | ASMC | ESO-ASMC | |
| Linear trajectory | 0.1400 | 0.1267 | 0.4431 | 0.4197 | 0 | 0 |
| Circular trajectory | 0.2957 | 0.2819 | 1 | 1 | 0 | 0 |
| Linear Trajectory | RMSE (m) | Max Error (m) | Min Error (m) | |||
|---|---|---|---|---|---|---|
| ASMC | ESO-ASMC | ASMC | ESO-ASMC | ASMC | ESO-ASMC | |
| Group A | 0.1441 | 0.1283 | 0.4452 | 0.4236 | 0 | 0 |
| Group B | 0.1509 | 0.1312 | 0.4511 | 0.4323 | 0 | 0 |
| Group C | 0.1482 | 0.1296 | 0.4511 | 0.4206 | 0 | 0 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Zhou, C.; Yu, Y.; Liu, X. Adaptive Sliding Mode Trajectory Tracking Control for WMR Considering Skidding and Slipping via Extended State Observer. Energies 2019, 12, 3305. https://doi.org/10.3390/en12173305
Wang G, Zhou C, Yu Y, Liu X. Adaptive Sliding Mode Trajectory Tracking Control for WMR Considering Skidding and Slipping via Extended State Observer. Energies. 2019; 12(17):3305. https://doi.org/10.3390/en12173305
Chicago/Turabian StyleWang, Gang, Chenghui Zhou, Yu Yu, and Xiaoping Liu. 2019. "Adaptive Sliding Mode Trajectory Tracking Control for WMR Considering Skidding and Slipping via Extended State Observer" Energies 12, no. 17: 3305. https://doi.org/10.3390/en12173305
APA StyleWang, G., Zhou, C., Yu, Y., & Liu, X. (2019). Adaptive Sliding Mode Trajectory Tracking Control for WMR Considering Skidding and Slipping via Extended State Observer. Energies, 12(17), 3305. https://doi.org/10.3390/en12173305