A Unified Method for Online Detection of Phase Variables and Symmetrical Components of Unbalanced Three-Phase Systems with Harmonic Distortion


Abstract
1. Motivation and Literature Review
- Overall problem statement in most general setting (see Section 1.1);
- Overall solution (see Section 1.2);
- Low-Pass Filter (see Section 2.1) and High-Pass Filter (see Section 2.2);
- Stability analysis and tuning rule of parallelized Second-Order Generalized Integrators (see Section 2.3);
- Frequency Locked Loop with Gain Normalization and Output Saturation (see Section 2.4);
- Amplitude Phase Corrections for Low- and High-Pass Filters (see Section 2.5);
- DC-offset detection (see Section 2.6);
- positive-, negative-, and zero-sequence detection of each harmonic component and of the original low-pass filtered input signals (see Section 2.7); and
- Illustration of the theoretical results by extensive simulations (see Section 3).
1.1. Problem Statement
- (i)
- to detect online estimates of DC-offset , amplitudes , and angles of the three phases for a limited bandwidth of the total harmonic distortion—that is, (where, clearly, the highest harmonic is smaller than —that is, ), such that, after a short transient phase, the estimated quantities (indicated by “ ”) are equal to the band-limited (low-pass and high-pass filtered; see Section 2.1 and Section 2.2) original signal. More precisely, the following should hold:
- (ii)
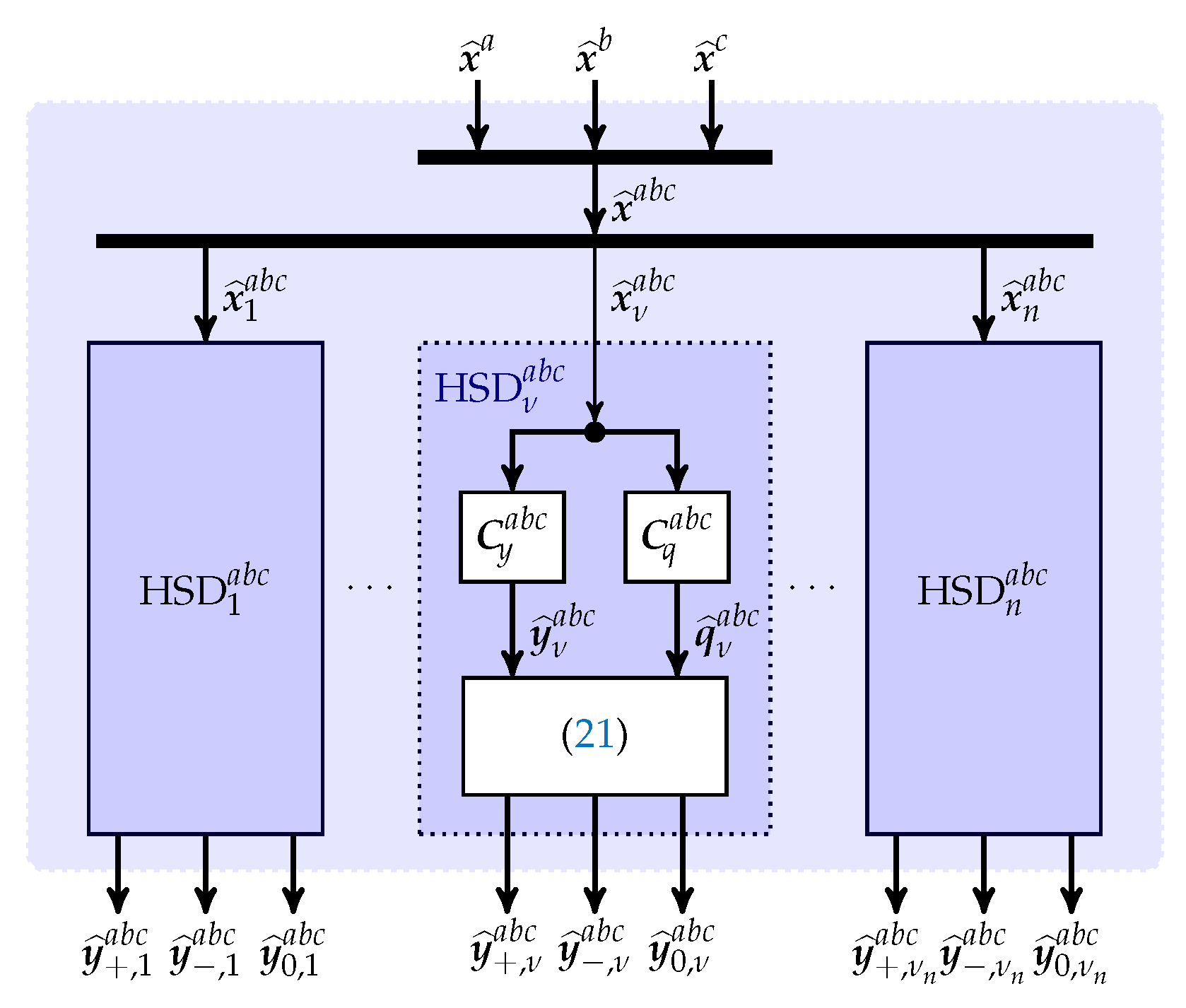
- and if the fundamental frequencies of the three phases are identical (i.e., for all ), to extract, for each harmonic , positive sequence components, negative sequence components (Positive and negative sequences are balanced signals, that is, for all and ([9], Appendix A)) and zero sequence components of the low-pass filtered and offset free harmonic signal vector as in (3) such that the following holds for all and (at least in the steady-state).
1.2. Principle Idea of Proposed Overall Solution
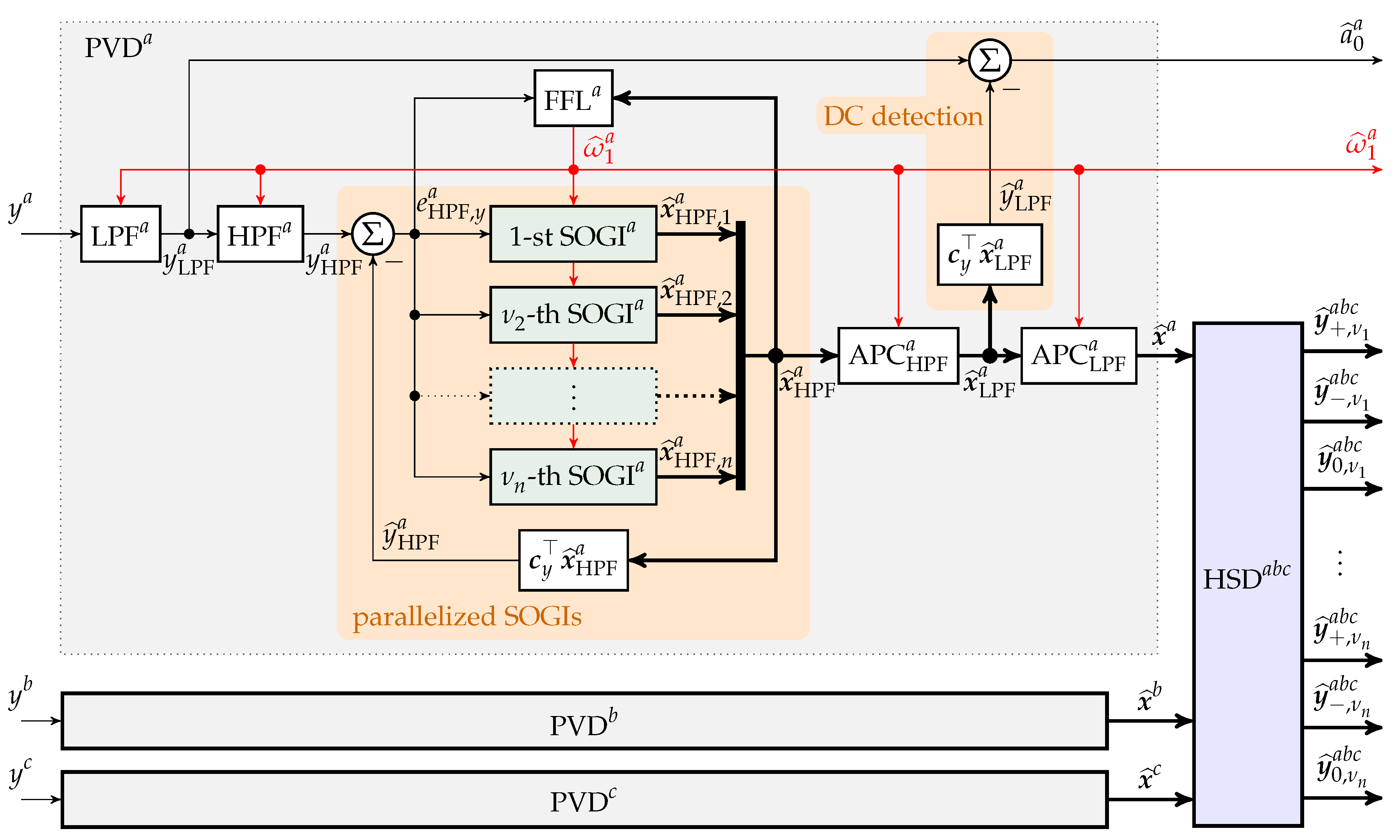
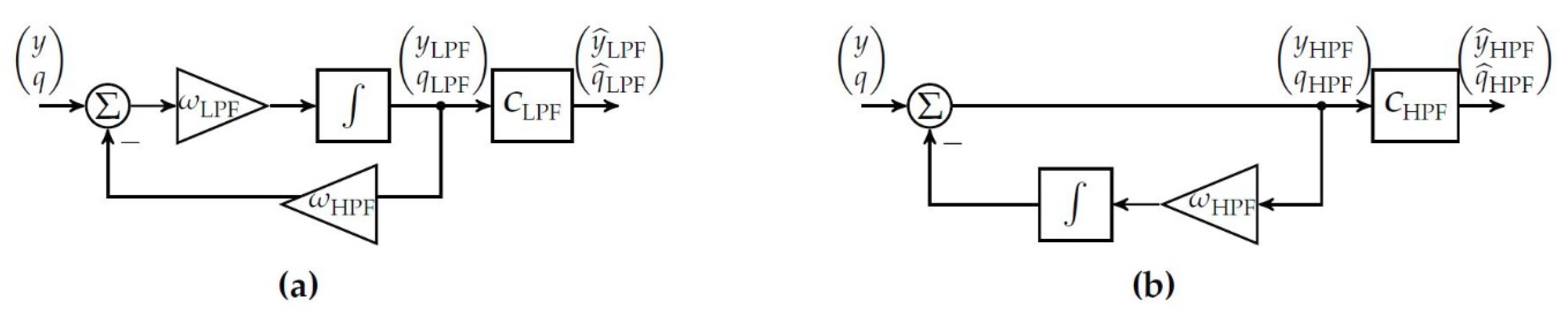
- A Low-Pass Filter (LPF) to filter out noise and limit the bandwidth of the input signal ;
- A High-Pass Filter (HPF) to filter out any DC-offset in the low-pass filtered signal ;
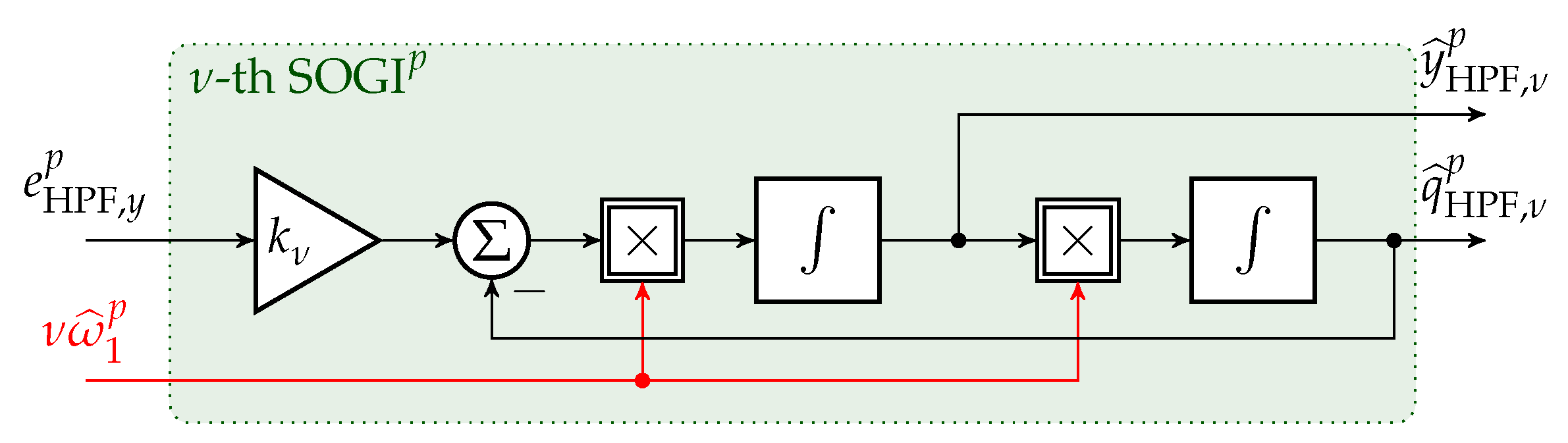
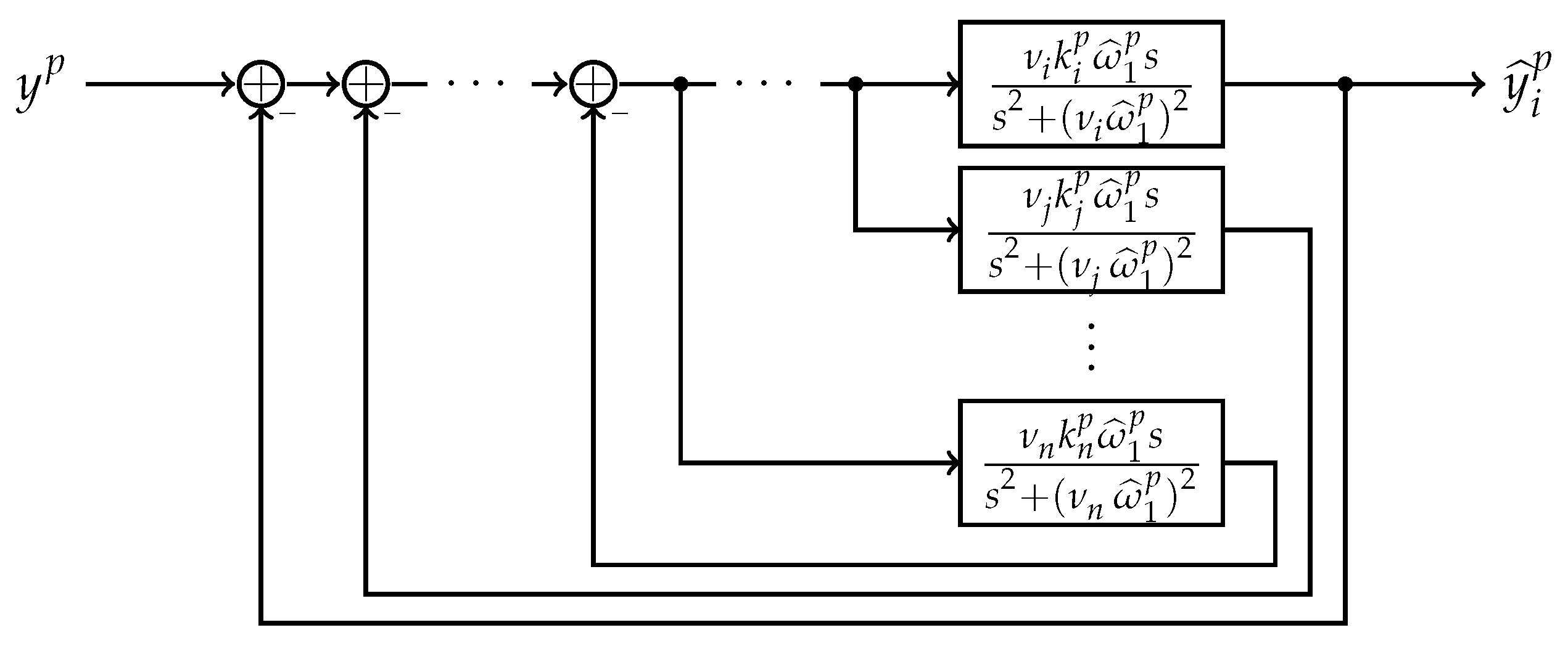
- A parallelization of Second-Order Generalized Integrators (SOGIs) to detect the amplitude and phase of each of the harmonic components of the high-pass filtered signal : the -th SOGI will output the estimated signal vector compromising estimate of the direct and quadrature signal of the -th harmonic, resp. All n-estimated signal vectors are merged into the overall estimate vectorThe overall estimate output of the SOGI input signal is established by the sum (linear combination) of the estimates of the direct signals of all SOGIs;
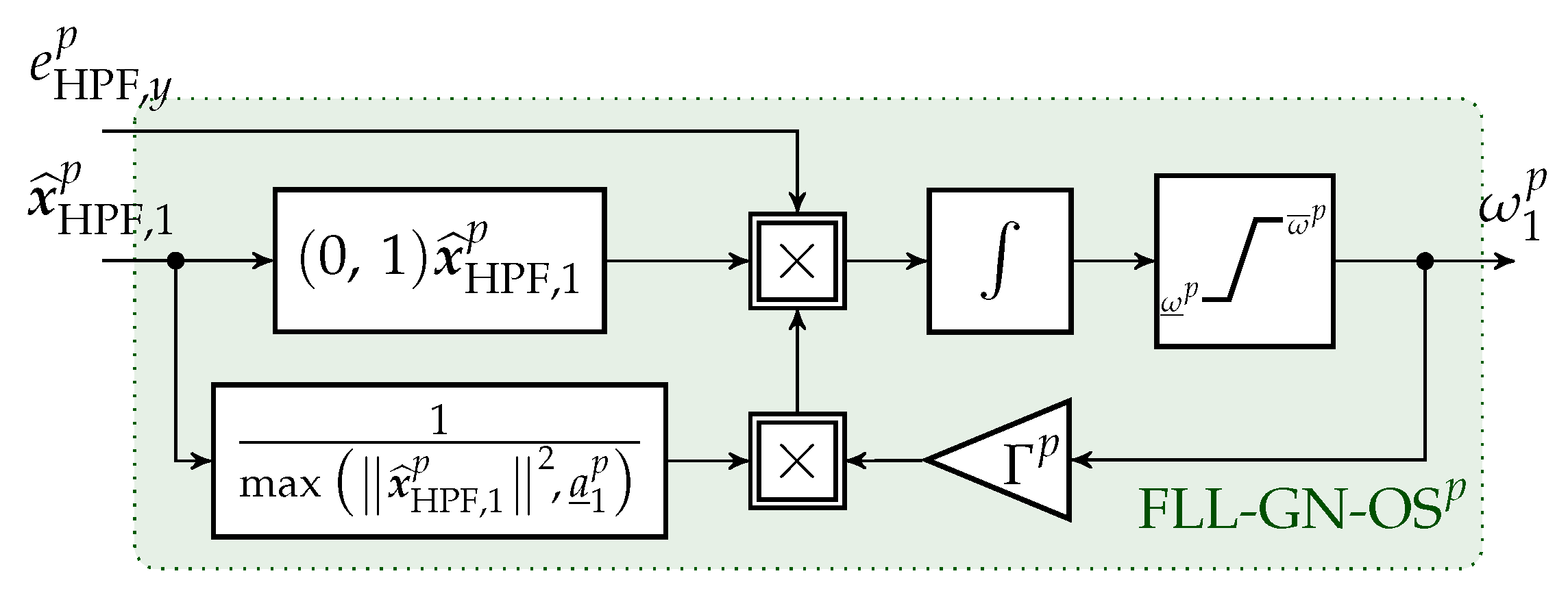
- a Frequency-Locked Loop (FLL) to obtain the estimate of the fundamental angular frequency of the high-pass filtered signal ;
- an Amplitude Phase Correction (APC with ) to mitigate for amplitude damping and phase shift introduced by LPF and HPF, resp.: The merged estimated signal vector of the parallelized SOGIs is fed into the APC. The APC output vectorcomprises all amplitude-correct and phase-correct direct and quadrature estimates of the low-pass filtered signal (see Figure 1). The signal vector is fed into the APC to reconstruct amplitude-correct and phase-correct direct and quadrature estimates of the original signal (see Figure 1). The output vector of the APC is given by
- A DC-offset detection to obtain an estimate of the DC-offset in the original signal (see Figure 1).
2. Detailed Discussion of Proposed Overall Solution
2.1. Low-Pass Filter (Bandwidth Limitation and Noise Filtering)
2.2. High-Pass Filter (Suppression of DC-Offset)
2.3. Second-Order Generalized Integrator (SOGI)
2.3.1. SOGI for the -th Harmonic Component of Phase
2.3.2. Parallelization of SOGIs
2.3.3. Tuning of the SOGIs
2.4. Frequency-Locked Loop (FLL) with Gain Normalization and Output Saturation
2.4.1. Intuition behind a FLL
2.4.2. Output Saturation
2.5. Amplitude and Phase Correction (APC) for Low-Pass Filter and High-Pass Filter
2.6. DC-Offset Detection
2.7. Harmonic Sequence Detection (HSD) of Positive-, Negative-, and Zero-Sequence Components of All Harmonics
3. Implementation: Simulation Results
- (S1)
- Estimation of a fundamental, single-phase input signal with known and constant fundamental angular frequency and without DC-offset to validate the functionality of the APC.
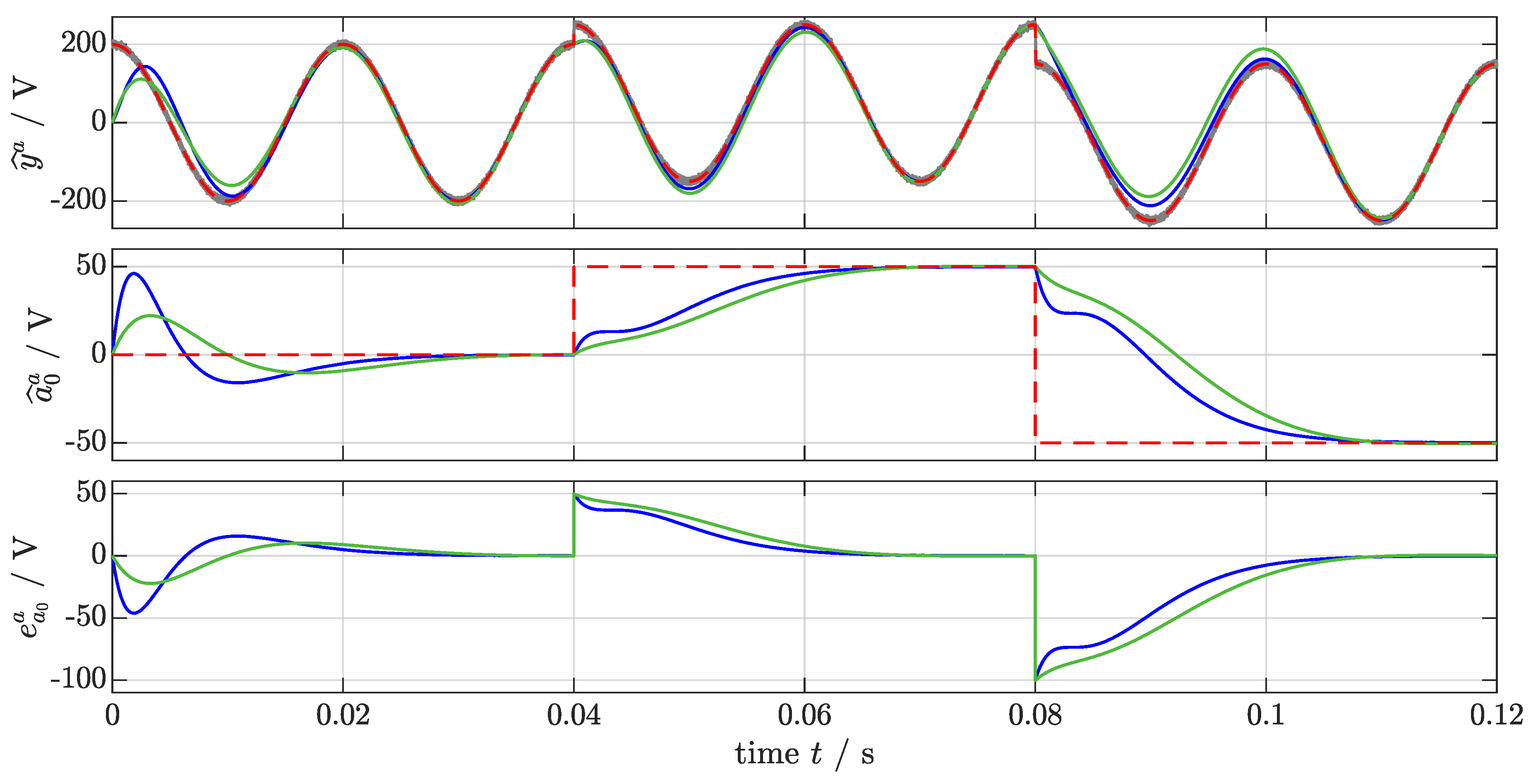
- (S2)
- Estimation of a fundamental, single-phase input signal with known and constant fundamental angular frequency and with DC-offset to (i) validate the proposed DC-offset estimation method and to compare it to the existing method [4]. The signal undergoes offset jumps of at t = 0.04 s and and at t = 0.08 s.
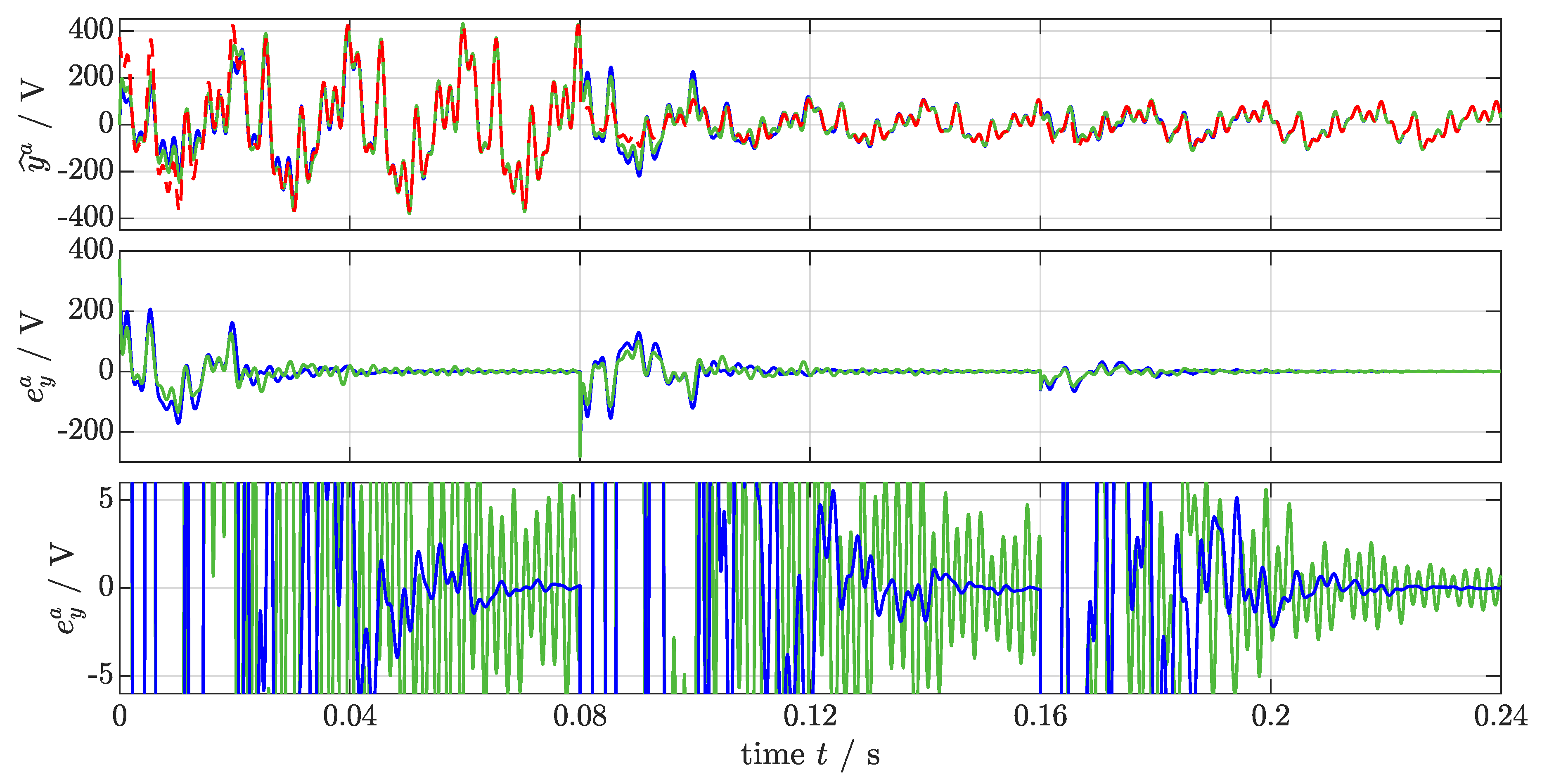
- (S3)
- Estimation of a single-phase input signal with ten harmonics, known and constant fundamental angular frequency and without DC-offset to (i) show the improved tuning method and to compare it to [13]. The signal undergoes an amplitude jump () at t = 0.08 s and a phase jump () at t = 0.16 s.
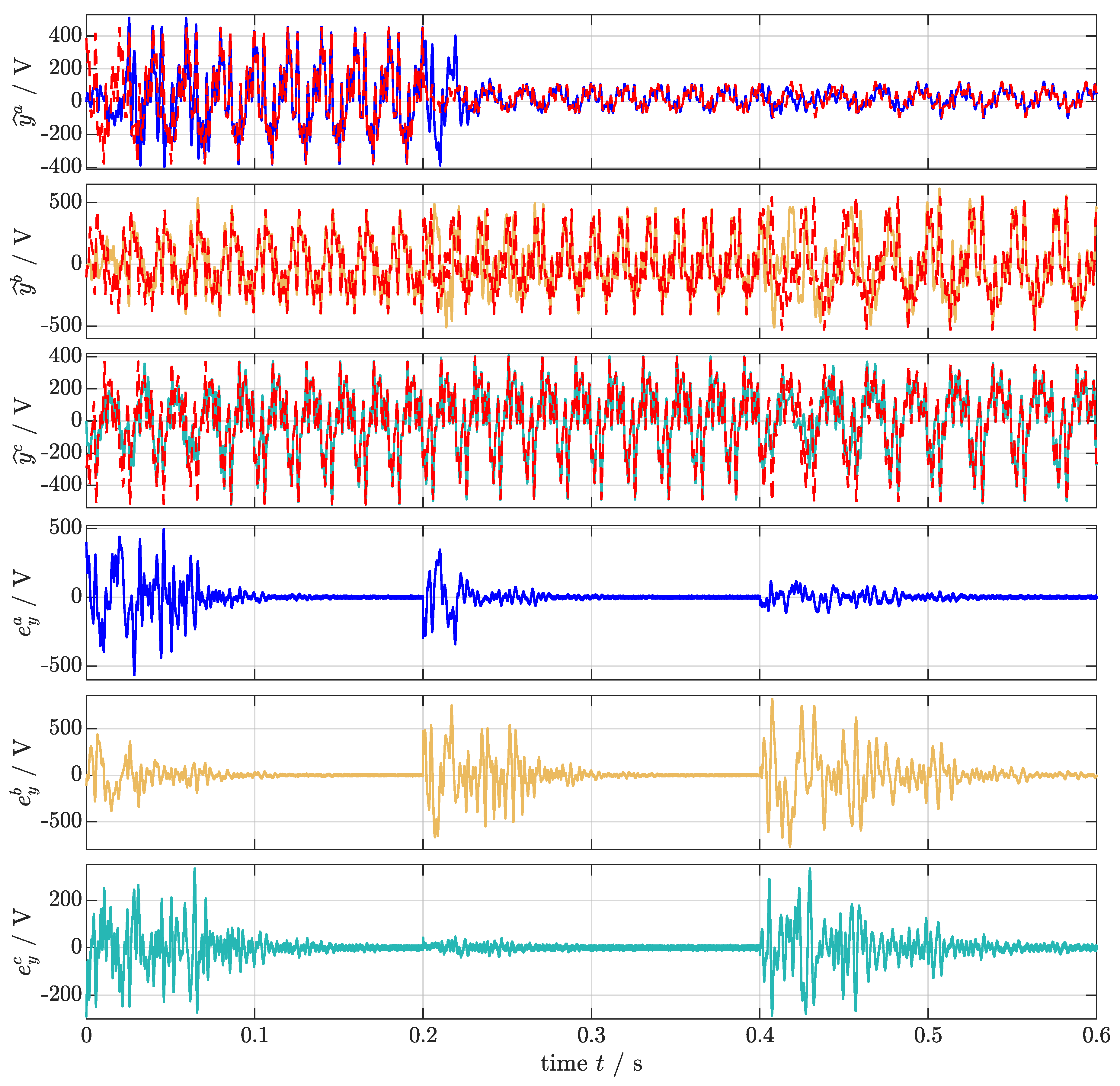
- (S4)
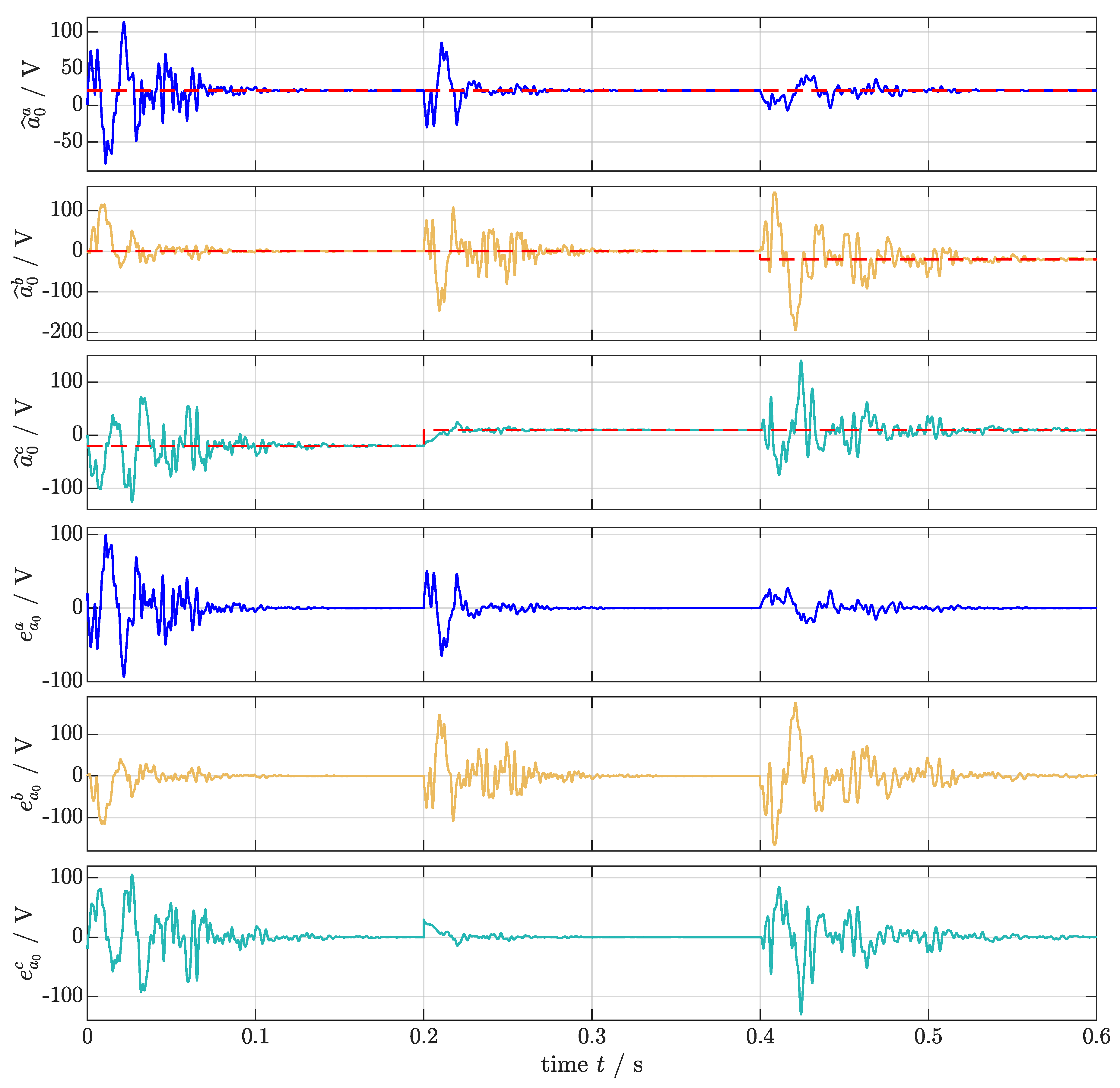
- Estimation of a three-phase input signal with ten harmonics, unknown fundamental angular frequency, and with DC-offset to verify the whole algorithm, including symmetrical components. The signals undergo (i) an amplitude jump () in phase a, a phase () and frequency jump () in phase b, and an offset jump () in phase c at t = 0.2 s, and (ii) a phase () and frequency jump () in phase a, an amplitude (), offset () and frequency jump () in phase b, and a frequency jump () in phase c at t = 0.4 s. At , the three phases are balanced, and they are unbalanced at t≥ 0.2 s. Note that the second harmonic component remains balanced.
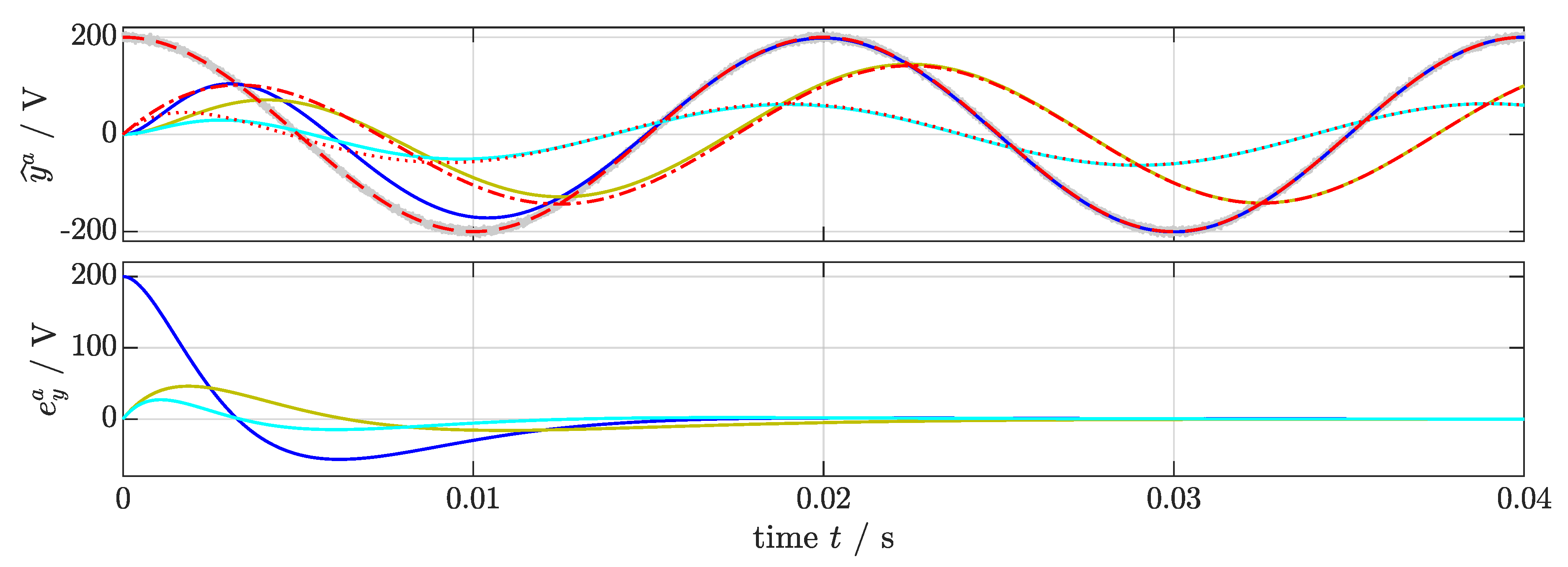
3.1. Discussion of the Simulation Results of Scenario (S1)
 ), the noisy input signal (
), the noisy input signal ( ), which is damped and shifted due to the LPF (
), which is damped and shifted due to the LPF ( ), and HPF (
), and HPF ( ). The resulting signal was analyzed by the SOGI, whose in-phase output (
). The resulting signal was analyzed by the SOGI, whose in-phase output ( ), the reconstructed in-phase outputs of the APC (
), the reconstructed in-phase outputs of the APC ( ), and APC (
), and APC ( ), respectively, are shown. The APCs reconstruct the original input signal correctly, which can be seen in the estimation errors (), (), and (), which tend toward zero within .
), respectively, are shown. The APCs reconstruct the original input signal correctly, which can be seen in the estimation errors (), (), and (), which tend toward zero within .3.2. Discussion of the Simulation Results of Scenario (S2)
), the noisy input signal (), & its estimates (this paper: , [4]:  ), the DC-offset & and its estimates , and the error in DC-offset estimation , respectively. The proposed method estimates the input signal and the DC-offset asymptotically. Moreover, the DC-offset estimation of the proposed method is faster than the DC-SOGI, but is clearly still limited due to the limited time response of the SOGI. The time response can be made faster by tuning the filters accordingly, which, on the other hand, leads to larger overshoots.
), the DC-offset & and its estimates , and the error in DC-offset estimation , respectively. The proposed method estimates the input signal and the DC-offset asymptotically. Moreover, the DC-offset estimation of the proposed method is faster than the DC-SOGI, but is clearly still limited due to the limited time response of the SOGI. The time response can be made faster by tuning the filters accordingly, which, on the other hand, leads to larger overshoots.3.3. Discussion of the Simulation Results of Scenario (S3)
), and its estimate with the proposed tuning () and the standard tuning () in the first subplot; the second subplot shows the respective errors , which are shown again in a close-up in the third subplot. Both methods are able to track the input signal asymptotically. However, by using the proposed tuning, the settling time reduces to ; where in contrast, the standard tuning does not settle down satisfactory in the time-frames shown, and is much more turbulent. On the other hand, this faster time response comes at the cost of (slightly) higher overshooting (see, e.g., < 0.02 s).3.4. Discussion of the Simulation Results of Scenario (S4)
) (but not the noisy signals , or ) and its estimates (), ( ) & (
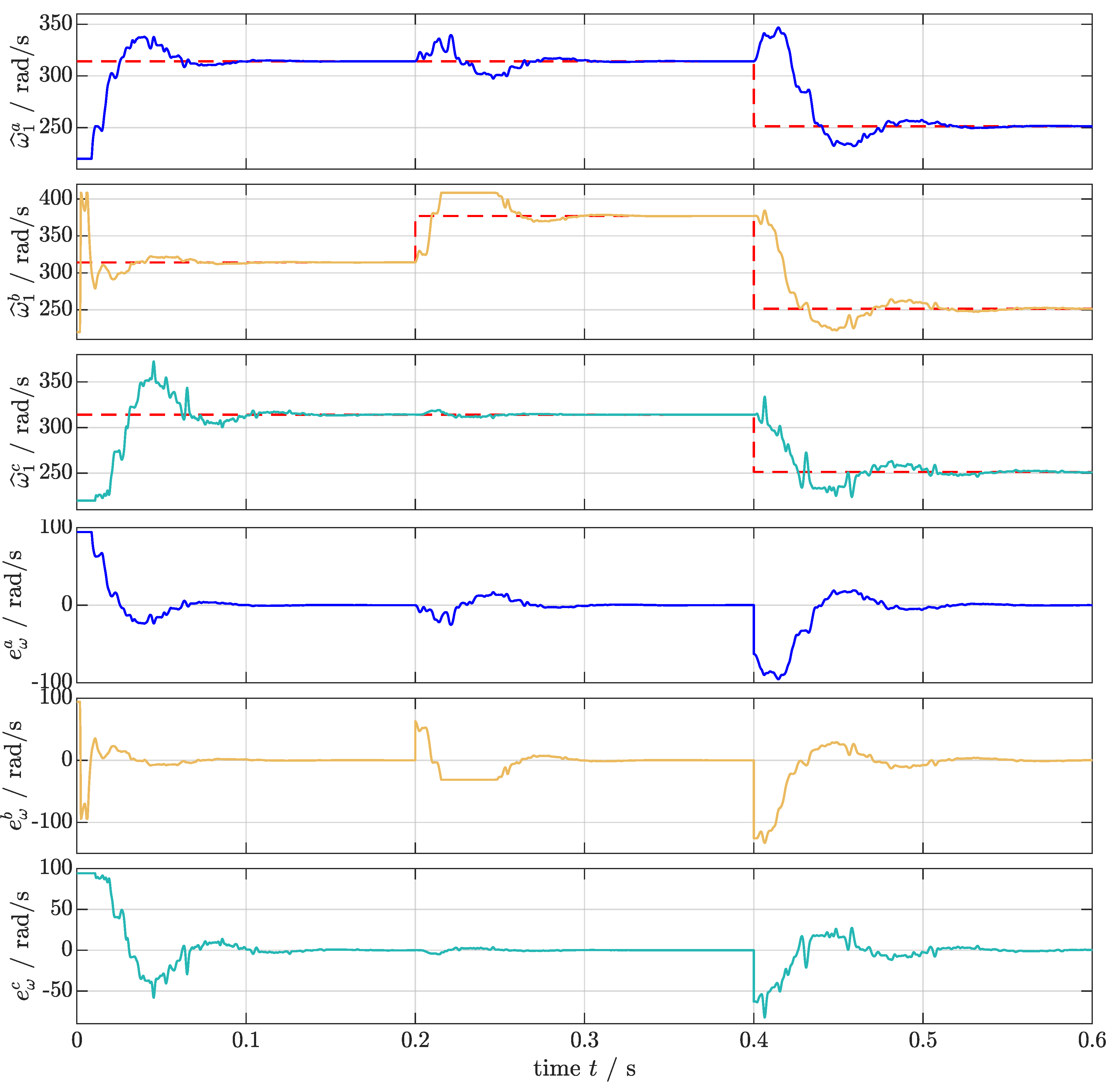
) & ( ) are shown, whereas in the subplots 4 to 6, the estimation errors , and are depicted. All SOGIs estimate the input signal properly.), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ) in subplots 1 to 6, respectively. The combination of HPF and APC estimates the DC-offsets correctly.) and its estimates , & (phase a: ; phase b: ; phase c: ) are shown in the first three subplots; in the last three subplots, the respective errors , & (phase a: ; phase b: ; phase c: ) are illustrated. The FLLs, in combination with the GN and OS, estimate the fundamental angular frequencies correctly. However, clearly, comparing Scenario (S4) to (S3), the FLLs slow down the overall system; an overall estimation is achieved within 0.16 s or less. The proposed frequency limitation (OS) enforces the frequency estimation to stay within the defined band (despite the initial values), which prevents overshooting (see at 0.23 s).
) are shown, whereas in the subplots 4 to 6, the estimation errors , and are depicted. All SOGIs estimate the input signal properly.), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ) in subplots 1 to 6, respectively. The combination of HPF and APC estimates the DC-offsets correctly.) and its estimates , & (phase a: ; phase b: ; phase c: ) are shown in the first three subplots; in the last three subplots, the respective errors , & (phase a: ; phase b: ; phase c: ) are illustrated. The FLLs, in combination with the GN and OS, estimate the fundamental angular frequencies correctly. However, clearly, comparing Scenario (S4) to (S3), the FLLs slow down the overall system; an overall estimation is achieved within 0.16 s or less. The proposed frequency limitation (OS) enforces the frequency estimation to stay within the defined band (despite the initial values), which prevents overshooting (see at 0.23 s).- The offset jump ( at t = 0.2 s in phase c) has almost no influence on the overall system; the changed input is estimated in about 0.03 s;
- The amplitude jump ( at t = 0.2 s in phase a) causes moderate system errors; the system takes approximately 0.08 s to settle down again; and
- The frequency jump ( at t = 0.4 s in phase c) severely excites the settled system; it requires 0.16 s to settle down.
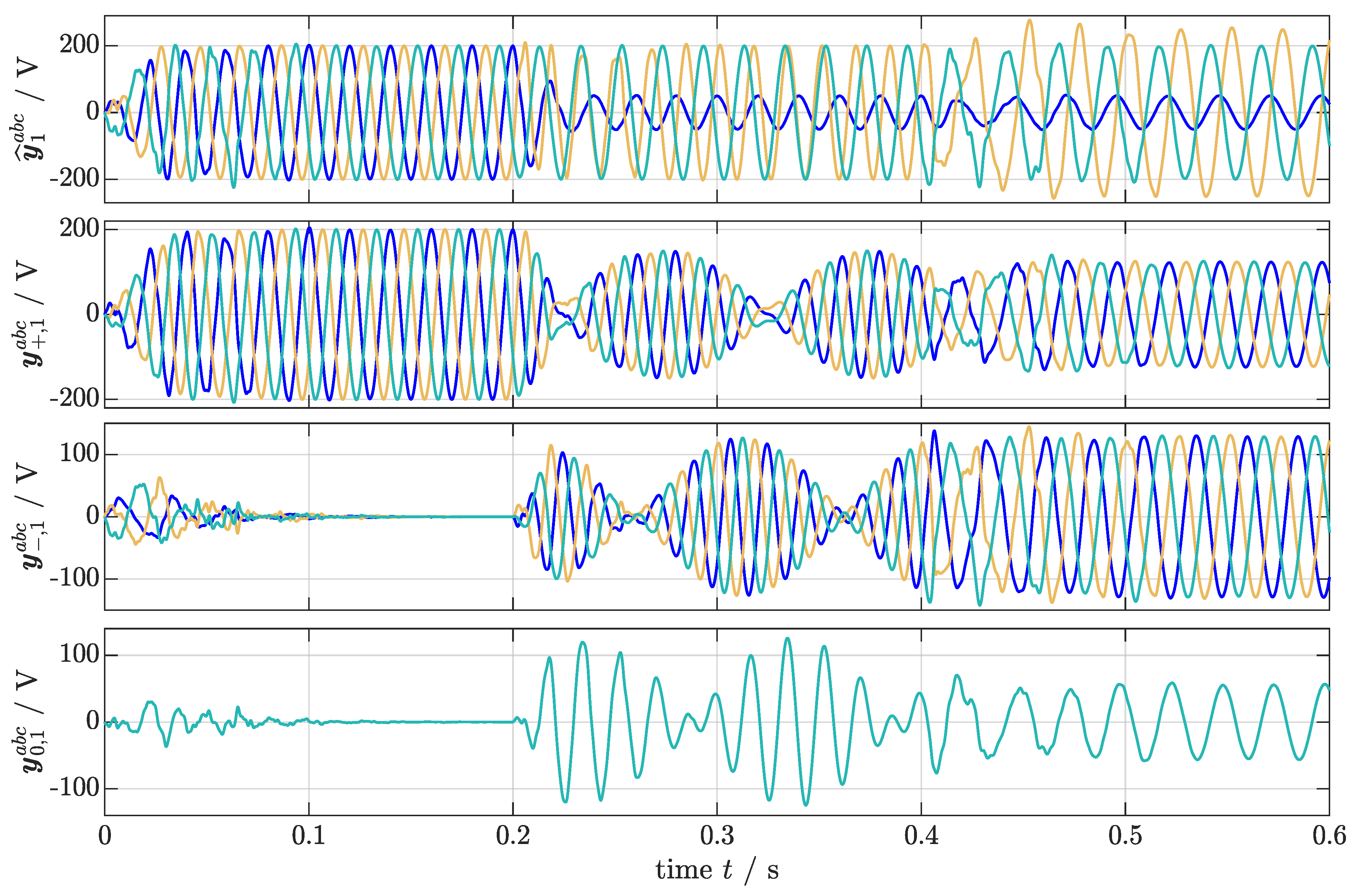
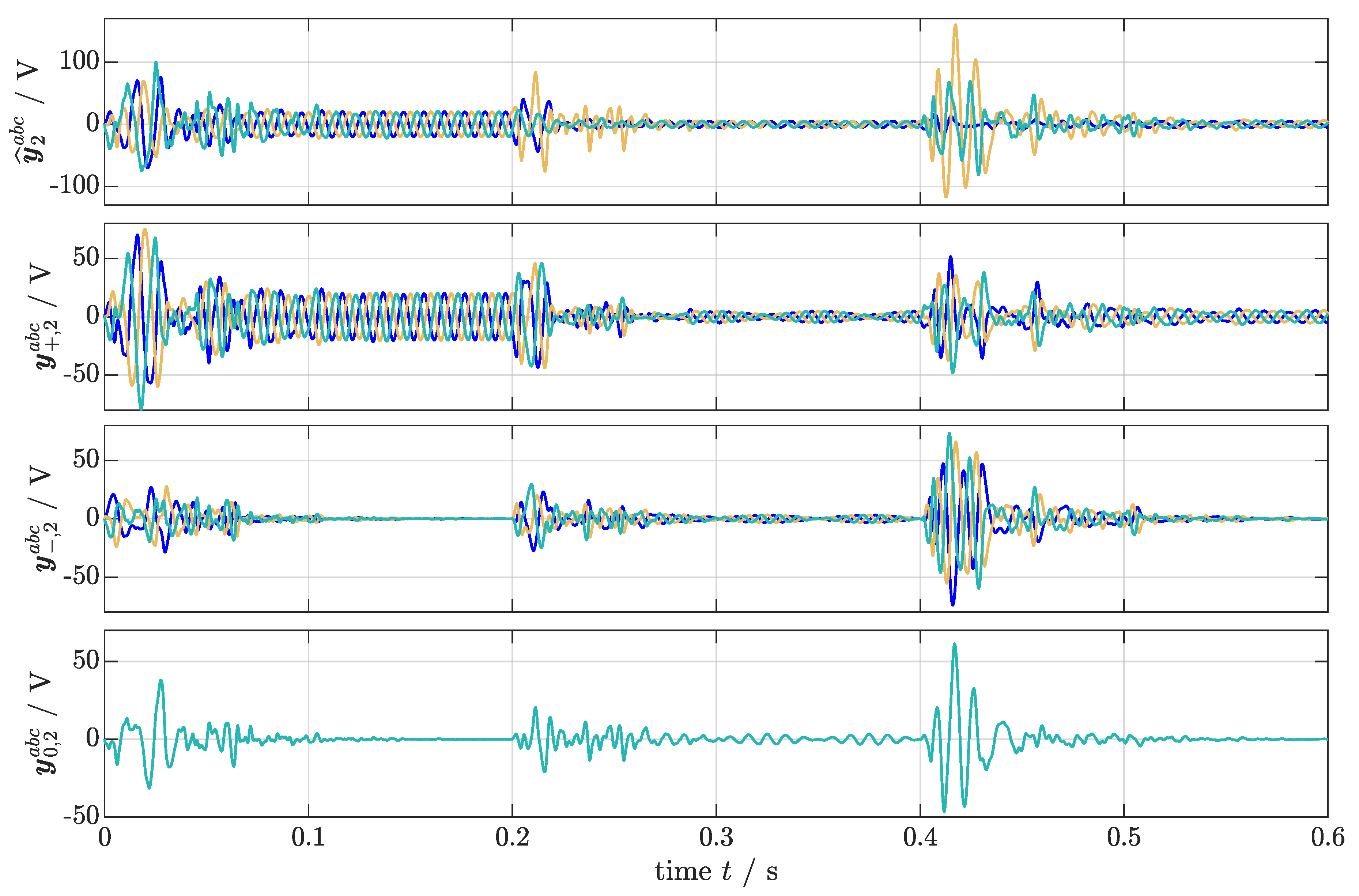
; phase b: ; phase c: ). In general, the positive-, negative-, and zero-sequence only shows in the steady-state. In the first time-frame, ( 0.2 s), the fundamental component is balanced, so the symmetrical component calculation only shows the positive sequence. In the second time-frame (0.2 s 0.4 s), the frequencies are not identical, so the symmetrical components cannot be calculated anymore; in fact, the positive-, negative-, and zero-sequences are enclosed by an oscillating hull, wherein each of the phases has the same frequency, which is unequal to the true signal frequencies. In the last time-frame (0.4 s 0.6 s), the frequencies are identical, and the harmonic sequence detection works properly again. As defined, the fundamental component is unbalanced, which finds itself in the presence of a negative and zero sequence.; phase b: ; phase c: ). Since the second harmonic component is balanced for all time steps, the negative and zero sequence only show in the time-frame with differing frequencies. Referring to this time-frame 0.2 s < 0.4 s, the sequence signals and the hull oscillate with double frequency with respect to the fundamental component.4. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. Hurwitz Stability

Appendix A.2. Bounded-Input Bounded-State/Bounded-Output Stability
Appendix A.3. Boundedness and Exponential Decay of the Signal Estimation Error
Appendix A.4. Derivation of Sub-Correction (Rotation) Matrices for and

Appendix A.5. Matlab Code for Fastest Time Response


References
- Fortescue, C.L. Method of symmetrical co-ordinates applied to the solution of polyphase networks. Proc. Am. Inst. Electr. Eng. 1918, 37, 629–716. [Google Scholar] [CrossRef]
- Daou, N.; Khatounian, F. A combined phase locked loop technique for grid synchronization of power converters under highly distorted grid conditions. In Proceedings of the 2016 IEEE International Multidisciplinary Conference on Engineering Technology (IMCET), Beirut, Lebanon, 2–4 November 2016; pp. 108–114. [Google Scholar] [CrossRef]
- De Souza, H.E.P.; Bradaschia, F.; Neves, F.A.S.; Cavalcanti, M.C.; Azevedo, G.M.S.; de Arruda, J.P. A Method for Extracting the Fundamental-Frequency Positive-Sequence Voltage Vector Based on Simple Mathematical Transformations. IEEE Trans. Ind. Electron. 2009, 56, 1539–1547. [Google Scholar] [CrossRef]
- Patil, K.R.; Patel, H.H. Modified dual second-order generalised integrator FLL for synchronization of a distributed generator to a weak grid. In Proceedings of the 2016 IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Cutri, R.; Matakas, L. A new instantaneous method for harmonics, positive and negative sequence detection for compensation of distorted currents with static converters using pulse width modulation. In Proceedings of the 2004 11th International Conference on Harmonics and Quality of Power (IEEE Cat. No.04EX951), Lake Placid, NY, USA, 12–15 September 2004; pp. 374–378. [Google Scholar] [CrossRef]
- Chilipi, R.; Sayari, N.A.; Hosani, K.H.A.; Beig, A.R. Adaptive Notch Filter Based Multipurpose Control Scheme for Grid-Interfaced Three-Phase Four-Wire DG Inverter. IEEE Trans. Ind. Appl. 2017. [Google Scholar] [CrossRef]
- Salih, H.W.; Wang, S.; Dora, J.A. Adaptive Notch Filter based Fuzzy controller for synchronization of grid with renewable energy sources. In Proceedings of the 2015 Conference on Power, Control, Communication and Computational Technologies for Sustainable Growth (PCCCTSG), Kurnool, India, 11–12 December 2015; pp. 122–127. [Google Scholar] [CrossRef]
- Hackl, C.M.; Landerer, M. Modified second-order generalized integrators with modified frequency locked loop for fast harmonics estimation of distorted single-phase signals. IEEE Trans. Power Electron. 2019. [Google Scholar] [CrossRef]
- Teodorescu, R.; Liserre, M.; Rodriguez, P. Grid Converters for Photovoltaic and Wind Power Systems; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar]
- Xiao, F.; Dong, L.; Li, L.; Liao, X. A Frequency-Fixed SOGI-Based PLL for Single-Phase Grid-Connected Converters. IEEE Trans. Power Electron. 2017, 32, 1713–1719. [Google Scholar] [CrossRef]
- Ngo, T.; Nguyen, Q.; Santoso, S. Improving performance of single-phase SOGI-FLL under DC-offset voltage condition. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 1537–1541. [Google Scholar] [CrossRef]
- Muzi, F.; Barbati, M. A real-time harmonic monitoring aimed at improving smart grid power quality. In Proceedings of the 2011 IEEE International Conference on Smart Measurements of Future Grids (SMFG) Proceedings, Bologna, Italy, 14–16 Novemeber 2011; pp. 95–100. [Google Scholar] [CrossRef]
- Mojiri, M.; Karimi-Ghartemani, M.; Bakhshai, A. Time-Domain Signal Analysis Using Adaptive Notch Filter. IEEE Trans. Signal Process. 2007, 55, 85–93. [Google Scholar] [CrossRef]
- Zarei, M.; Karimadini, M.; Nadjafi, M.; Salami, A. A novel method for estimation of the fundamental parameters of distorted single-phase signals. In Proceedings of the 2015 30th International Power System Conference (PSC), Tehran, Iran, 23–25 November 2015; pp. 271–276. [Google Scholar]
- Ferreira, R.J.; Araújo, R.E.; Lopes, J.A.P. A comparative analysis and implementation of various PLL techniques applied to single-phase grids. In Proceedings of the 2011 3rd International Youth Conference on Energetics (IYCE), Leiria, Portugal, 7–9 July 2011; pp. 1–8. [Google Scholar]
- Golestan, S.; Mousazadeh, S.Y.; Guerrero, J.M.; Vasquez, J.C. A Critical Examination of Frequency-Fixed Second-Order Generalized Integrator-Based Phase-Locked Loops. IEEE Trans. Power Electron. 2017, 32, 6666–6672. [Google Scholar] [CrossRef]
- Matas, J.; Martin, H.; de la Hoz, J.; Abusorrah, A.; Al-Turki, Y.A.; Al-Hindawi, M. A Family of Gradient Descent Grid Frequency Estimators for the SOGI Filter. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]
- Kulkarni, A.; John, V. A novel design method for SOGI-PLL for minimum settling time and low unit vector distortion. In Proceedings of the IECON 2013—39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 274–279. [Google Scholar] [CrossRef]
- Ralev, I.; Klein-Hessling, A.; Pariti, B.; Doncker, R.W.D. Adopting a SOGI filter for flux-linkage based rotor position sensing of switched reluctance machines. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Park, J.S.; Lee, D.C.; Van, T.L. Advanced single-phase SOGI-FLL using self-tuning gain based on fuzzy logic. In Proceedings of the 2013 IEEE ECCE Asia Downunder, Melbourne, Australia, 3–6 June 2013; pp. 1282–1288. [Google Scholar] [CrossRef]
- Yada, H.K.; Murthy, M.S.R. An improved control algorithm for DSTATCOM based on single-phase SOGI-PLL under varying load conditions and adverse grid conditions. In Proceedings of the 2016 IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Krstić, M.R.; Lubura, S.; Lale, S.; Šoja, M.; Ikić, M.; Milovanović, D. Analysis of discretization methods applied on DC-SOGI block as part of SRF-PLL structure. In Proceedings of the 2016 International Symposium on Industrial Electronics (INDEL), Banja Luka, Bosnia Herzegovina, 3–5 November 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Kim, E.S.; Seong, U.S.; Lee, J.S.; Hwang, S.H. Compensation of dead time effects in grid-tied single-phase inverter using SOGI. In Proceedings of the 2017 IEEE Applied Power Electronics Conference and Exposition (APEC), Tampa, FL, USA, 26–30 March 2017; pp. 2633–2637. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, S.; Jain, C. Damped-SOGI-Based Control Algorithm for Solar PV Power Generating System. IEEE Trans. Ind. Appl. 2017, 53, 1780–1788. [Google Scholar] [CrossRef]
- Xie, M.; Wen, H.; Zhu, C.; Yang, Y. DC Offset Rejection Improvement in Single-Phase SOGI-PLL Algorithms: Methods Review and Experimental Evaluation. IEEE Access 2017, 5, 12810–12819. [Google Scholar] [CrossRef]
- Cossutta, P.; Raffo, S.; Cao, A.; Ditaranto, F.; Aguirre, M.P.; Valla, M.I. High speed single-phase SOGI-PLL with high resolution implementation on an FPGA. In Proceedings of the 2015 IEEE 24th International Symposium on Industrial Electronics (ISIE), Buzios, Brazil, 3–5 June 2015; pp. 1004–1009. [Google Scholar] [CrossRef]
- Yi, H.; Wang, X.; Blaabjerg, F.; Zhuo, F. Impedance Analysis of SOGI-FLL-Based Grid Synchronization. IEEE Trans. Power Electron. 2017, 32, 7409–7413. [Google Scholar] [CrossRef]
- Janík, D.; Talla, J.; Komrska, T.; Peroutka, Z. Optimalization of SOGI PLL for single-phase converter control systems: Second-order generalized integrator (SOGI). In Proceedings of the 2013 International Conference on Applied Electronics, Pilsen, Czech Republic, 10–12 September 2013; pp. 1–4. [Google Scholar]
- Fedele, G.; Ferrise, A.; Frascino, D. Structural properties of the SOGI system for parameters estimation of a biased sinusoid. In Proceedings of the 2010 9th International Conference on Environment and Electrical Engineering, Prague, Czech Republic, 16–19 May 2010; pp. 438–441. [Google Scholar] [CrossRef]
- Qiming, C.; Fengren, T.; Jie, G.; Yu, Z.; Deqing, Y. The separation of positive and negative sequence component based on SOGI and cascade DSC and its application at unbalanced PWM rectifier. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 5804–5808. [Google Scholar] [CrossRef]
- Xin, Z.; Qin, Z.; Lu, M.; Loh, P.C.; Blaabjerg, F. A new second-order generalized integrator based quadrature signal generator with enhanced performance. In Proceedings of the 2016 IEEE Energy Conversion Congress and Exposition (ECCE), Milwaukee, WI, USA, 18–22 September 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Reza, M.S.; Ciobotaru, M.; Agelidis, V.G. Accurate Estimation of Single-Phase Grid Voltage Parameters Under Distorted Conditions. IEEE Trans. Power Deliv. 2014, 29, 1138–1146. [Google Scholar] [CrossRef]
- Karimi-Ghartemani, M.; Khajehoddin, S.A.; Jain, P.K.; Bakhshai, A.; Mojiri, M. Addressing DC Component in PLL and Notch Filter Algorithms. IEEE Trans. Power Electron. 2012, 27, 78–86. [Google Scholar] [CrossRef]
- Panda, S.K.; Dash, T.K. An improved method of frequency detection for grid synchronization of DG systems during grid abnormalities. In Proceedings of the 2014 International Conference on Circuits, Power and Computing Technologies (ICCPCT-2014), Nagercoil, India, 20–21 March 2014; pp. 153–157. [Google Scholar] [CrossRef]
- Yan, Z.; He, H.; Li, J.; Su, M.; Zhang, C. Double fundamental frequency PLL with second-order generalized integrator under unbalanced grid voltages. In Proceedings of the 2014 International Power Electronics and Application Conference and Exposition, Shanghai, China, 5–8 November 2014; pp. 108–113. [Google Scholar] [CrossRef]
- Luo, Z.; Kaye, M.; Diduch, C.; Chang, L. Frequency measurement using a frequency locked loop. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 917–921. [Google Scholar] [CrossRef]
- Karkevandi, A.E.; Daryani, M.J. Frequency estimation with antiwindup to improve SOGI filter transient response to voltage sags. In Proceedings of the 2018 6th International Istanbul Smart Grids and Cities Congress and Fair (ICSG), Istanbul, Turkey, 25–26 April 2018; pp. 188–192. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Vasquez, J.C.; Abusorrah, A.M.; Al-Turki, Y. Modeling, Tuning, and Performance Comparison of Second-Order-Generalized-Integrator-Based FLLs. IEEE Trans. Power Electron. 2018, 33, 10229–10239. [Google Scholar] [CrossRef]
- He, X.; Geng, H.; Yang, G. Reinvestigation of Single-Phase FLLs. IEEE Access 2019, 7, 13178–13188. [Google Scholar] [CrossRef]
- Golestan, S.; Guerrero, J.M.; Musavi, F.; Vasquez, J. Single-Phase Frequency-Locked Loops: A Comprehensive Review. IEEE Trans. Power Electron. 2019. [Google Scholar] [CrossRef]
- Hackl, C.M. Non-Identifier Based Adaptive Control in Mechatronics: Theory and Application; Number 466 in Lecture Notes in Control and Information Sciences; Springer International Publishing: Berlin, Germany, 2017. [Google Scholar]
- Hinrichsen, D.; Pritchard, A. Mathematical Systems Theory I—Modelling, State Space Analysis, Stability and Robustness; Number 48 in Texts in Applied Mathematics; Springer: Berlin, Germany, 2005. [Google Scholar]
- Abramowitz, M.; Stegun, I.A. (Eds.) Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables; Tenth Printing, December 1972 ed.; Applied Mathematics Series; National Bureau of Standards: Gaithersburg, MD, USA, 1964.
- Bernstein, D.S. Matrix Mathematics—Theory, Facts, and Formulas with Application to Linear System Theory, 2nd ed.; Princeton University Press: Princeton, NJ, USA; Oxford, UK, 2009. [Google Scholar]
- Råde, L.; Westergren, B.; Vachenauer, P. Springers Mathematische Formeln: Taschenbuch für Ingenieure, Naturwissenschaftler, Informatiker, Wirtschaftswissenschaftler, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall Internation Inc.: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Francis, B.A.; Wonham, W.M. The Internal Model Principle of Control Theory. Automatica 1976, 12, 457–465. [Google Scholar] [CrossRef]



 ), noisy input (: ), LPF (: ), and HPF (: ) signals, its estimates, and respective errors (, : ; , : ; and , : ).
), noisy input (: ), LPF (: ), and HPF (: ) signals, its estimates, and respective errors (, : ; , : ; and , : ).
), noisy input (: ), LPF (: ), and HPF (: ) signals, its estimates, and respective errors (, : ; , : ; and , : ).
), noisy input (: ), LPF (: ), and HPF (: ) signals, its estimates, and respective errors (, : ; , : ; and , : ). ), noise-free input , and DC-offset (), its estimates & and DC-offset estimation error (this paper: , [4]: ).
), noise-free input , and DC-offset (), its estimates & and DC-offset estimation error (this paper: , [4]: ).
), noise-free input , and DC-offset (), its estimates & and DC-offset estimation error (this paper: , [4]: ).
), noise-free input , and DC-offset (), its estimates & and DC-offset estimation error (this paper: , [4]: ). ), its estimates , and estimation errors (this paper: , [13]: ).
), its estimates , and estimation errors (this paper: , [13]: ).
), its estimates , and estimation errors (this paper: , [13]: ).
), its estimates , and estimation errors (this paper: , [13]: ). ), its estimates , & and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & and errors , & (phase a: ; phase b: ; phase c: ). ), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ). ), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ).
), its estimates , & , and errors , & (phase a: ; phase b: ; phase c: ). ; phase b: ; phase c: ).
; phase b: ; phase c: ).
; phase b: ; phase c: ).
; phase b: ; phase c: ). ; phase b: ; phase c: ).
; phase b: ; phase c: ).
; phase b: ; phase c: ).
; phase b: ; phase c: ).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [1] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ |
| [3] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | |
| [4] | ✓ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ||
| [5] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | |
| [6] | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ✗ | ||
| [10] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ||
| [11] | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [12] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [13] | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ | ✓ | ||
| [14] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [15] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [16] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [17] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [18] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [19] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [20] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [21] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [22] | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ | |
| [23] | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ |
| [24] | ✗ | ✓ | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ |
| [25] | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [26] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ✗ | |
| [27] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | |
| [28] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [29] | ✓ | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ | ✓ | |
| [30] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | |
| [31] | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | |
| [32] | ✗ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [33] | ✓ | ✗ | ✗ | ✓ | ✓ | ✗ | ✗ | ||
| [34] | ✗ | ✗ | ✗ | ✗ | ✗ | ✓ | ✗ | ||
| [35] | ✓ | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ||
| [36] | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ✗ | ||
| [37] | ✗ | ✗ | ✓ | ✗ | ✗ | ✗ | ✗ | ||
| [38] | ✗ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ||
| [39] | ✗ | ✓ | ✓ | ✓ | ✓ | ✗ | ✗ | ||
| [40] | ✓ | ✗ | ✓ | ✓ | ✓ | ✗ | ✗ | ||
| [8] | ✗ | ✓ | ✗ | ✓ | ✓ | ✗ | ✓ | ||
| this | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ |
| Tuning | Real Part of Dominant Pole |
|---|---|
| as in Appendix A.5 |
| Scenario | (S1) | (S2) | (S3) | (S4) | |||
|---|---|---|---|---|---|---|---|
| Sampling time | |||||||
| Phase | p | a | a | a | a | b | c |
| LPF | |||||||
| cutoff frequency | / | ||||||
| initial value | 0 | 0 | / | 0 | 0 | 0 | |
| HPF | |||||||
| cutoff frequency | / | ||||||
| initial value | 0 | 0 | / | 0 | 0 | 0 | |
| SOGI | |||||||
| gain | Appendix A.5 | Appendix A.5 | Appendix A.5 | Appendix A.5 | Appendix A.5 | Appendix A.5 | |
| initial values | |||||||
| FLL | |||||||
| gain | |||||||
| initial value | |||||||
| GN | |||||||
| lower amplitude | / | / | / | 0.01 V2 | 0.01 V2 | 0.01 V2 | |
| OS | |||||||
| lower frequency | / | / | / | ||||
| upper frequency | / | / | / | ||||
| Reference model | / | [4] | [13] | / | / | / | |
| SOGI gain | / | / | / | / | |||
| DC gain | / | 0.26 | / | / | / | / | |
| initial values | / | / | / | / | |||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
|---|---|---|---|---|---|---|---|---|---|---|---|
| t < 0.2 s | |||||||||||
| 20 | 200 | 20 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | |
| 0 | 0 | ||||||||||
| 0 | 200 | 20 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | |
| 0 | |||||||||||
| 200 | 20 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | ||
| 0.2 s < 0.4 s | |||||||||||
| 20 | 50 | 5 | 0 | 30 | 10 | 20 | 15 | 5 | 0 | 25 | |
| s | 0 | 0 | |||||||||
| 0 | 200 | 5 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | |
| s | 0 | 0 | |||||||||
| 10 | 200 | 5 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | |
| s | |||||||||||
| 0.4 s 0.6 s | |||||||||||
| 20 | 50 | 5 | 0 | 30 | 10 | 20 | 15 | 5 | 0 | 25 | |
| s | 0 | ||||||||||
| 250 | 5 | 100 | 150 | 50 | 100 | 75 | 25 | 0 | 125 | ||
| s | 0 | ||||||||||
| 10 | 200 | 5 | 80 | 120 | 40 | 80 | 60 | 20 | 0 | 100 | |
| s | |||||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hackl, C.M.; Landerer, M. A Unified Method for Online Detection of Phase Variables and Symmetrical Components of Unbalanced Three-Phase Systems with Harmonic Distortion. Energies 2019, 12, 3243. https://doi.org/10.3390/en12173243
Hackl CM, Landerer M. A Unified Method for Online Detection of Phase Variables and Symmetrical Components of Unbalanced Three-Phase Systems with Harmonic Distortion. Energies. 2019; 12(17):3243. https://doi.org/10.3390/en12173243
Chicago/Turabian StyleHackl, Christoph M., and Markus Landerer. 2019. "A Unified Method for Online Detection of Phase Variables and Symmetrical Components of Unbalanced Three-Phase Systems with Harmonic Distortion" Energies 12, no. 17: 3243. https://doi.org/10.3390/en12173243
APA StyleHackl, C. M., & Landerer, M. (2019). A Unified Method for Online Detection of Phase Variables and Symmetrical Components of Unbalanced Three-Phase Systems with Harmonic Distortion. Energies, 12(17), 3243. https://doi.org/10.3390/en12173243