Robust LFC Strategy for Wind Integrated Time-Delay Power System Using EID Compensation


Abstract
1. Introduction
2. System Modelling
3. ADRC Design Based on EID Compensation
3.1. Configuration of the EID-Based Time-Delay System
3.2. Optimal Design of Controller Parameters
3.3. Stability Analysis
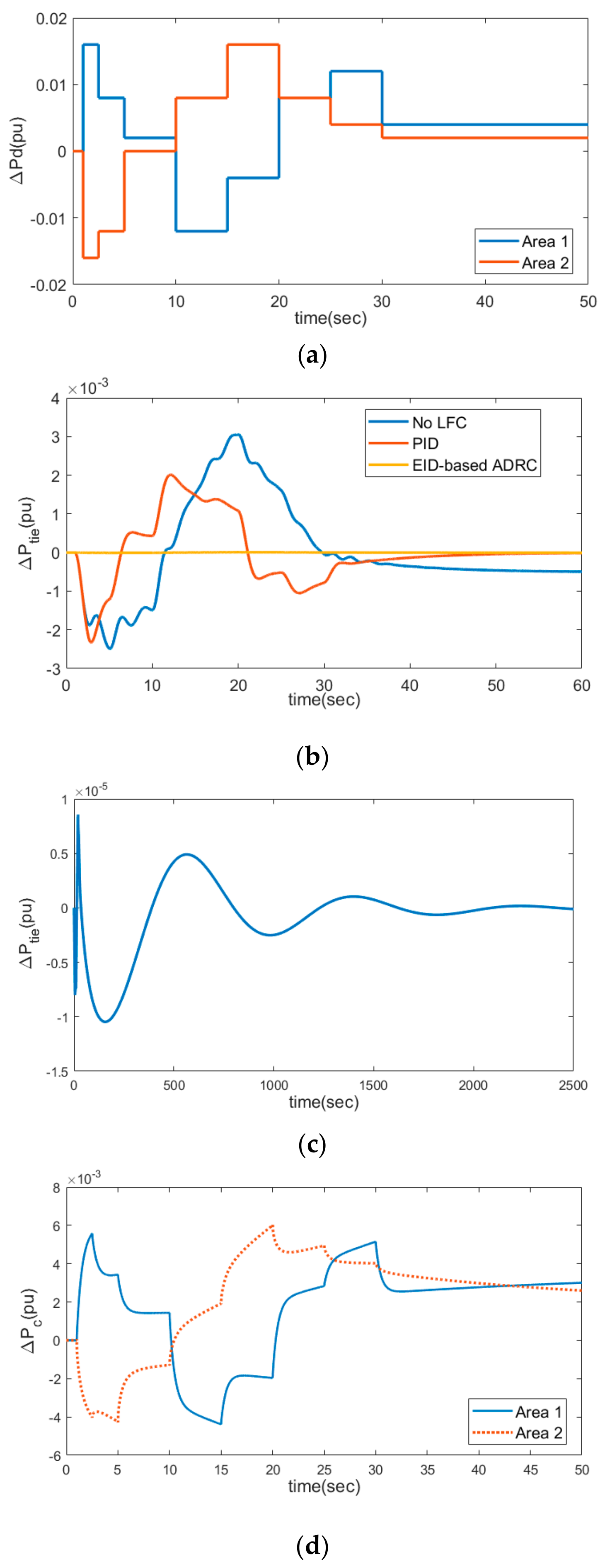
4. Case Studies
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Tch (s) | Tg (s) | R | D | β | M (s) |
|---|---|---|---|---|---|---|
| Area 1 | 0.3 | 0.1 | 0.05 | 1.0 | 21.0 | 10 |
| Area 2 | 0.4 | 0.17 | 0.05 | 1.5 | 21.5 | 12 |
| Rr (pu) | Rs (pu) | Xlr (pu) | Xls (pu) | Xm (pu) | Mt (pu) |
|---|---|---|---|---|---|
| 0.3 | 0.1 | 0.05 | 1.0 | 21.0 | 10 |
References
- Sasaki, T.; Enomoto, K. Dynamic Analysis of Generation Control Performance Standards. IEEE Power Eng. Rev. 2002, 22, 54. [Google Scholar] [CrossRef]
- Yousef, H. Adaptive fuzzy logic load frequency control of multi-area power system. Int. J. Electr. Power Energy Syst. 2015, 68, 384–395. [Google Scholar] [CrossRef]
- Nag, S.; Philip, N. Application of Neural Networks to Automatic Load Frequency Control. In Proceedings of the International Conference on Swarm, Evolutionary, and Memetic Computing, Calcutta, India, 31 January–2 February 2014; Springer: Cham, Switzerland; Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Chuang, N. Robust H ∞ load-frequency control in interconnected power systems. IET Control. Theory Appl. 2016, 10, 67–75. [Google Scholar] [CrossRef]
- Kumar, A. Impact Study of Dfig Based Wind Power Penetration on Lfc of a Multiarea Power System. In Proceedings of the IEEE India Conference, New Delhi, India, 17–20 December 2015. [Google Scholar]
- Rather, Z.H.; Chen, Z.; Thøgersen, P.; Lund, P. Dynamic Reactive Power Compensation of Large-Scale Wind Integrated Power System. IEEE Trans. Power Syst. 2015, 30, 2516–2526. [Google Scholar] [CrossRef]
- Kunya, A.B.; Argin, M. Model Predictive Load Frequency Control of Multi-Area Interconnected Power System. In Proceedings of the 2018 IEEE Texas Power and Energy Conference, College Station, TX, USA, 8–9 February 2018; pp. 1–6. [Google Scholar]
- Wang, S.B.; Jiang, Q.Y.; Liu, Z.Y.; Gao, Y.J. Wide-area Damping Control Considering Multiple Delays of Feedback Signals. Autom. Electr. Power Syst. 2008, 32, 18–22. [Google Scholar]
- Yu, X.; Tomsovic, K. Application of Linear Matrix Inequalities for Load Frequency Control with Communication Delays. IEEE Trans. Power Syst. 2004, 19, 1508–1515. [Google Scholar] [CrossRef]
- Bevrani, H.; Hiyama, T. Robust decentralized PI based LFC design for time delay power systems. Energy Convers. Manag. 2008, 49, 193–204. [Google Scholar] [CrossRef]
- Bevrani, H. Robust Power System Frequency Control; Springer Science and Business Media LLC: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Sönmez, S.; Ayasun, S. Stability Region in the Parameter Space of PI Controller for a Single-Area Load Frequency Control System with Time Delay. IEEE Trans. Power Syst. 2016, 31, 1–2. [Google Scholar] [CrossRef]
- Yongjuan, L.; Yang, M.; Yang, Y.; Limin, W. The study of sliding mode load frequency control for single area time delay power system. In Proceedings of the 27th Chinese Control and Decision Conference (CCDC), Qingdao, China, 23–25 May 2015. [Google Scholar]
- Ojaghi, P.; Rahmani, M. LMI-Based Robust Predictive Load Frequency Control for Power Systems with Communication Delays. IEEE Trans. Power Syst. 2017, 32, 4091–4100. [Google Scholar] [CrossRef]
- Li, X.; Wu, J. Sufficient stability conditions of nonlinear differential systems under impulsive control with state-dependent delay. IEEE Trans. Autom. Control 2017, 63, 306–311. [Google Scholar] [CrossRef]
- Yang, H.; Wang, X.; Zhong, S.; Shu, L. Synchronization of nonlinear complex dynamical systems via delayed impulsive distributed control. Appl. Math. Comput. 2018, 320, 75–85. [Google Scholar] [CrossRef]
- Lu, X.; Chen, N.; Wang, Y.; Qu, L.; Lai, J. Distributed impulsive control for islanded micro-grids with variable communication delays. LET Control Theory Appl. 2016, 10, 1732–1739. [Google Scholar] [CrossRef]
- Jiang, L.; Yao, W.; Wu, Q.H.; Wen, J.Y.; Cheng, S.J. Delay-Dependent Stability for Load Frequency Control with Constant and Time-Varying Delays. IEEE Trans. Power Syst. 2012, 27, 932–941. [Google Scholar] [CrossRef]
- Wen, S.; Yu, X.; Zeng, Z.; Wang, J. Event-triggering load frequency control for multi-area power systems with communication delays. IEEE Trans. Ind. Electron. 2015, 63, 1308–1317. [Google Scholar] [CrossRef]
- Ramakrishnan, K.; Ray, G. Stability Criteria for Nonlinearly Perturbed Load Frequency Systems with Time-Delay. IEEE J. Emerg. Sel. Top. Circuits Syst. 2015, 5, 1–10. [Google Scholar] [CrossRef]
- Zhao, S.; Gao, Z. Modified active disturbance rejection control for time-delay systems. ISA Trans. 2014, 53, 882–888. [Google Scholar] [CrossRef]
- Mohamed, T.H.; Morel, J.; Bevrani, H.; Hiyama, T. Model predictive based load frequency control_design concerning wind turbines. Int. J. Electr. Power Energy Syst. 2012, 43, 859–867. [Google Scholar] [CrossRef]
- Liu, F.; Xu, Z.; Li, Y.; Sidorov, D. Active disturbance rejection control based on EID compensation for LFC with communication delays. IFAC J. Syst. Control 2018, 6, 25–32. [Google Scholar] [CrossRef]
- She, J.H.; Fang, M.; Ohyama, Y.; Hashimoto, H.; Wu, M. Improving Disturbance-Rejection Performance Based on an Equivalent-Input-Disturbance Approach. IEEE Trans. Ind. Electron. 2008, 55, 380–389. [Google Scholar] [CrossRef]
- She, J.H.; Xin, X.; Yamaura, T. Analysis and Design of Control System with Equivalent-Input-Disturbance Estimation. In Proceedings of the 2006 IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 1463–1469. [Google Scholar]
- Liu, R.J.; Wu, M.; Liu, G.P.; She, J.; Thomas, C. Active Disturbance Rejection Control Based on an Improved Equivalent-Input-Disturbance Approach. IEEE/ASME Trans. Mechatron. 2013, 18, 1410–1413. [Google Scholar] [CrossRef]
- Liu, R.J.; Liu, G.P.; Wu, M.; Nie, Z.Y. Disturbance rejection for time-delay systems based on the equivalent-input-disturbance approach. J. Frankl. Inst. 2014, c1, 3364–3377. [Google Scholar] [CrossRef]
- Liu, F.; Li, Y.; Cao, Y.; She, J.; Wu, M. A Two-Layer Active Disturbance Rejection Controller Design for Load Frequency Control of Interconnected Power System. IEEE Trans. Power Syst. 2016, 31, 3320–3321. [Google Scholar] [CrossRef]
- Gu, K.; Kharitonov, V.L.; Chen, J. Stability of Time-Delay Systems; Birkhauser: Boston, MA, USA, 2003. [Google Scholar]
- Xia, Y.; Fu, M.; Shi, P. Analysis and Synthesis of Dynamical Systems with Time-Delays; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Pourmousavi, S.A.; Nehrir, M.H. Introducing Dynamic Demand Response in the LFC Model. IEEE Trans. Power Syst. 2014, 29, 1562–1572. [Google Scholar] [CrossRef]
- Liu, J.; Yao, Q.; Liu, Y.; Yang, H. Wind Farm Primary Frequency Control Strategy Based on Wind & Thermal Power Joint Control. Zhongguo Dianji Gongcheng Xuebao Proc. Chin. Soc. Electr. Eng. 2017, 37, 3462–3469. [Google Scholar]
- Aho, J.; Pao, L.; Fleming, P. An Active Power Control System for Wind Turbines Capable of Primary and Secondary Frequency Control for Supporting Grid Reliability. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar]












| X2 | X3 | T1 |
|---|---|---|
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, F.; Zhang, K.; Zou, R. Robust LFC Strategy for Wind Integrated Time-Delay Power System Using EID Compensation. Energies 2019, 12, 3223. https://doi.org/10.3390/en12173223
Liu F, Zhang K, Zou R. Robust LFC Strategy for Wind Integrated Time-Delay Power System Using EID Compensation. Energies. 2019; 12(17):3223. https://doi.org/10.3390/en12173223
Chicago/Turabian StyleLiu, Fang, Kailiang Zhang, and Runmin Zou. 2019. "Robust LFC Strategy for Wind Integrated Time-Delay Power System Using EID Compensation" Energies 12, no. 17: 3223. https://doi.org/10.3390/en12173223
APA StyleLiu, F., Zhang, K., & Zou, R. (2019). Robust LFC Strategy for Wind Integrated Time-Delay Power System Using EID Compensation. Energies, 12(17), 3223. https://doi.org/10.3390/en12173223