Intelligent Control of Converter for Electric Vehicles Charging Station


 , , and
, , and
Abstract
1. Introduction
- The PV panels are more effective than other renewables in populated and residential areas, due to their noise-free operation and low maintenance requirements.
- PV panels generate most of their energy during the highly priced grid tariff hours of the electrical grid. Thus, the EV charging stations can offset the high-cost electricity with solar energy during peak hours.
2. EV Charging Scenario
EV Charging
3. PV Assisted EV Charging
3.1. System Design Architectures for Solar-Powered Charging Stations
3.2. Power Converter Types for Grid Connected PV with ESD Assisted EV Charging
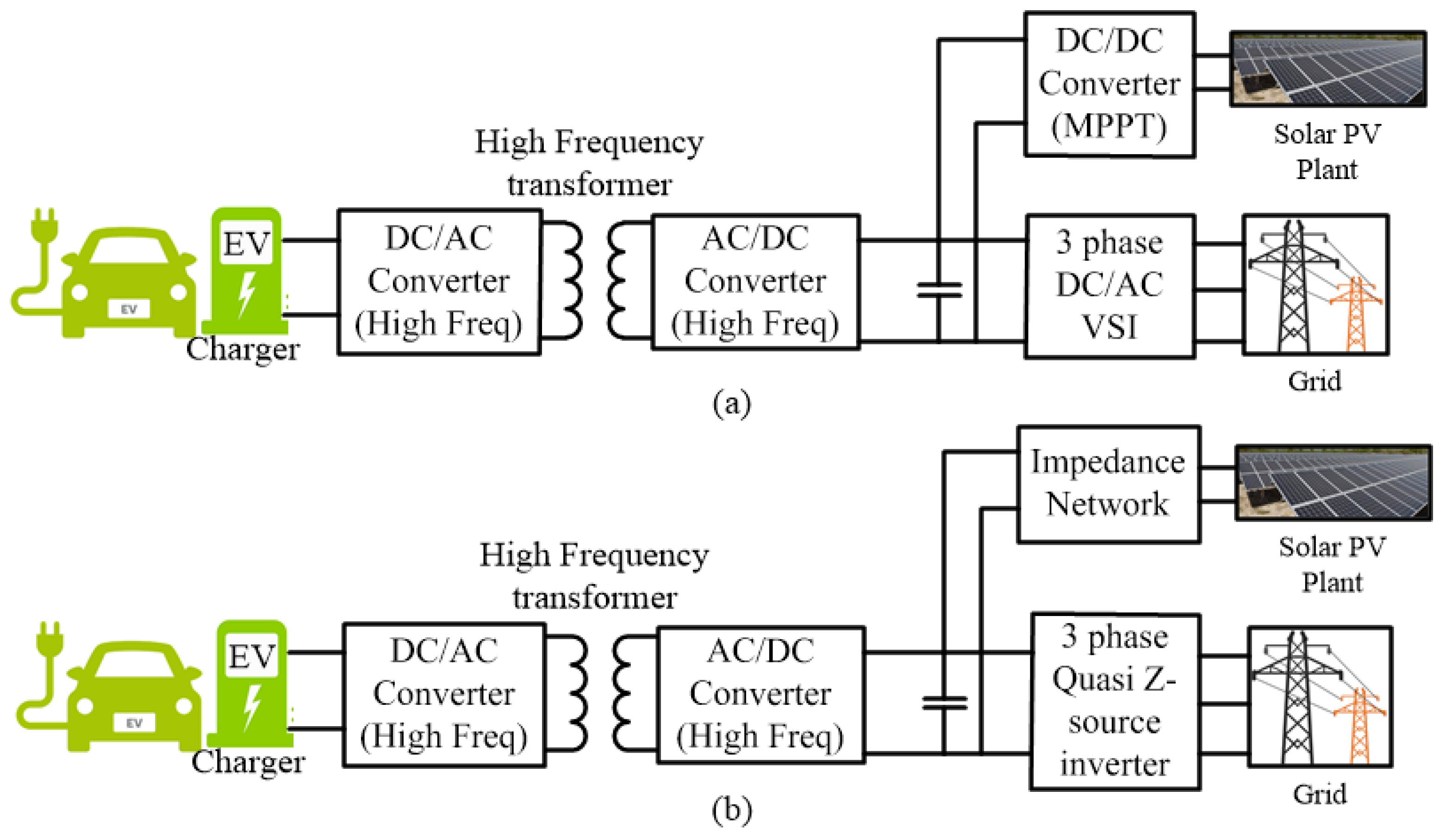
3.2.1. DC Link-Based Converter
3.2.2. Impedance-Network Based
3.3. Multiport Converter
4. Power Flow Management
4.1. Intelligent Energy Management Strategy
4.2. Dynamic Power Allocation for Energy Management at EV Charging Station
4.2.1. System Modeling
4.2.2. Optimization Objectives
4.2.3. System Constraints
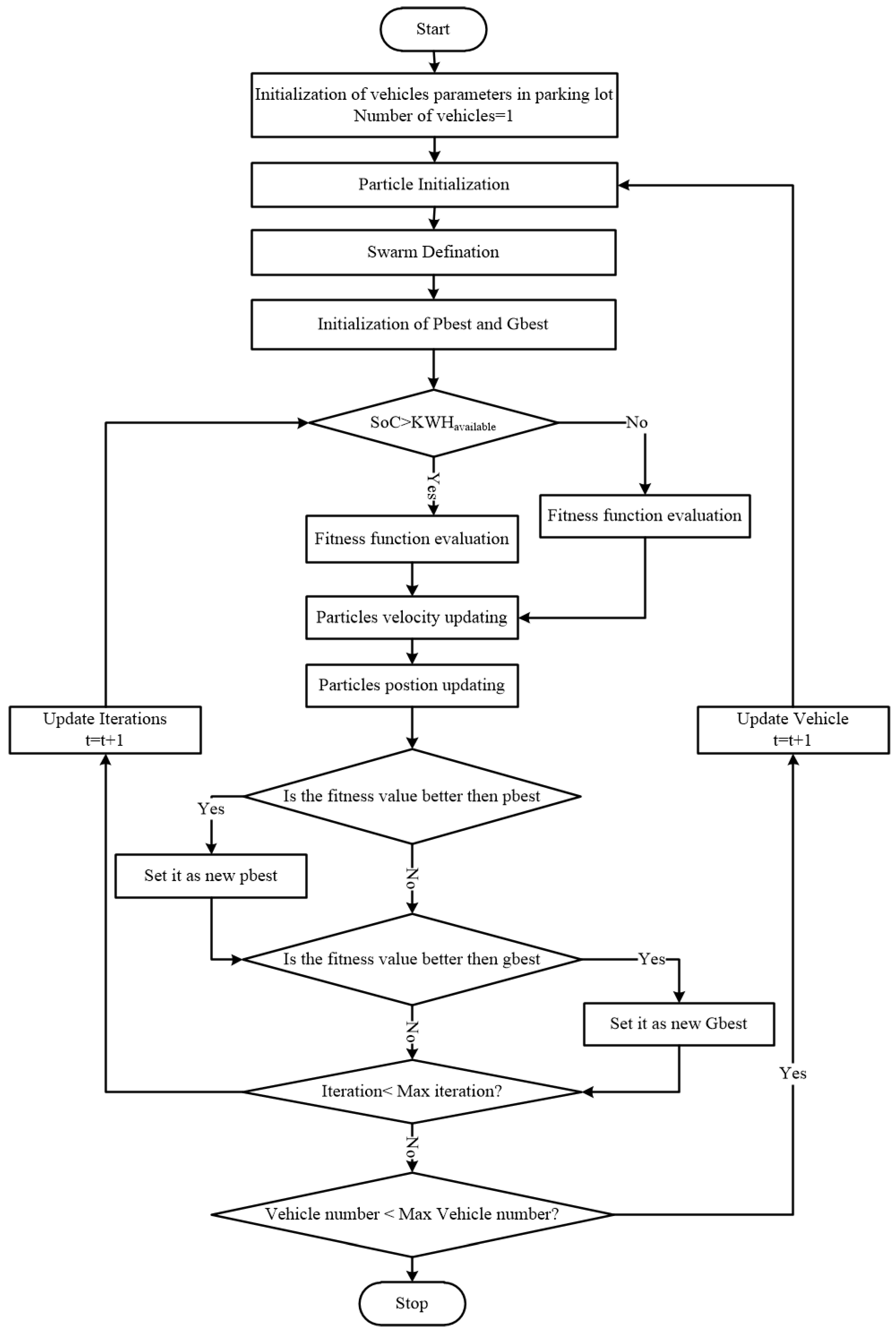
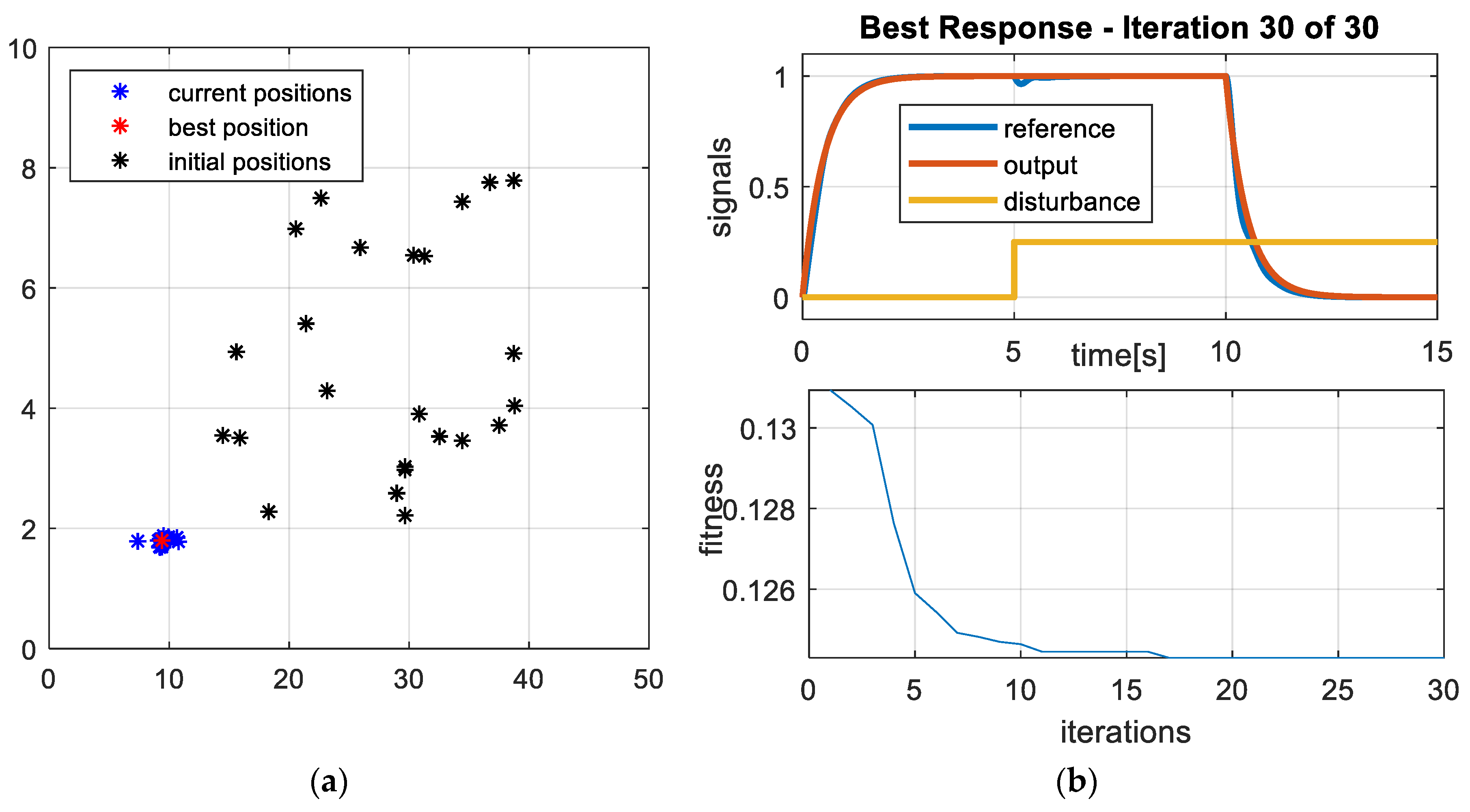
4.3. Particle Swarm Optimization
5. Methodology
6. Experimental Work
6.1. Electric Network Model
6.2. EV Charging Model
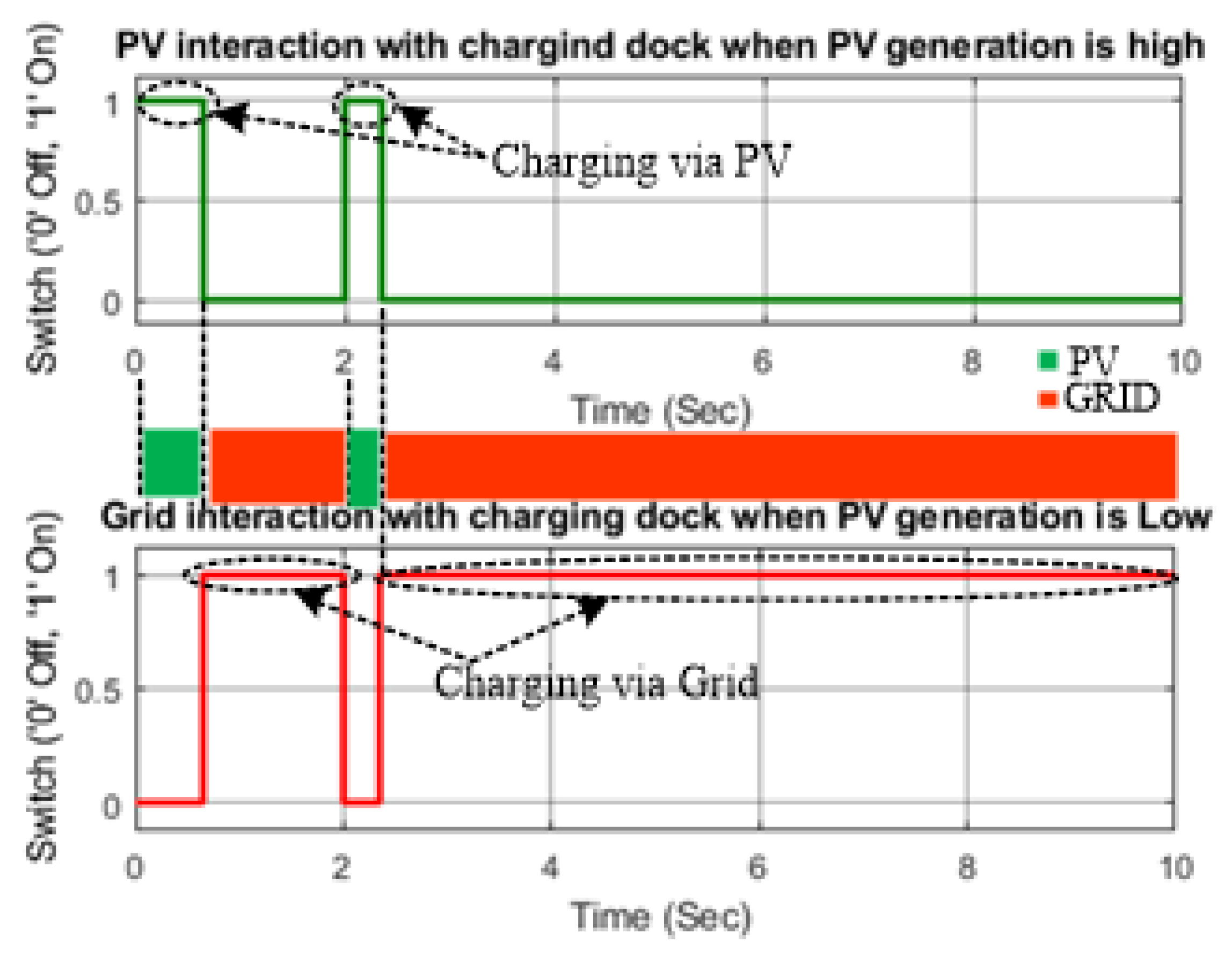
6.3. Modes of Operation
7. Conclusions
- The need to adopt renewable energy systems for the charging of electric vehicles is studied.
- The advantage of using an energy storage device with grid integrated PV systems for charging EVs is depicted.
- The major role of converters in achieving optimal and bidirectional power flow between various sources and loads is realized, and a multiport converter is designed for achieving the objective.
- The need for an intelligent-energy management system for operating the power converter as per the availability of power from the sources and demand on the load side is achieved by developing an optimal power flow algorithm.
- The developed algorithm is tested with a simulation setup by observing the various modes of operation on the system.
Author Contributions
Funding
Conflicts of Interest
References
- Chan, C.C.; Wong, Y.S. Electric Vehicles Charge Forward. IEEE Power Energy Mag. 2004, 2, 24–33. [Google Scholar] [CrossRef]
- Hidrue, M.K.; Parsons, G.R.; Kempton, W.; Gardner, M.P. Willingness to pay for electric vehicles and their attributes. Resour. Energy Econ. 2011, 33, 686–705. [Google Scholar] [CrossRef]
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels, and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Fairley, P. Speed bumps ahead for electric-vehicle charging. IEEE Spectr. 2010, 47, 13–14. [Google Scholar] [CrossRef]
- Clement-Nyns, K.; Haesen, E.; Driesen, J. The impact of Charging plug-in hybrid electric vehicles on a residential distribution grid. IEEE Trans. Power Syst. 2010, 25, 371–380. [Google Scholar] [CrossRef]
- Yunus, K.; la Parra, H.Z.D.; Reza, M. Distribution Grid Impact of Plug-In Electric Vehicles Charging at Fast Charging Stations Using Stochastic Charging Model. In Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; pp. 1–11. [Google Scholar]
- Botsford, C.; Szczepanek, A. Fast Charging vs. Slow Charging: Pros and cons for the New Age of Electric Vehicles. In Proceedings of the EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Stavanger, Norway, 13–16 May 2009. [Google Scholar]
- Gnann, T.; Funke, S.; Jakobsson, N.; Plotz, P.; Sprei, F.; Bennehag, A. Fast charging infrastructure for electric vehicles: Today’s situation and future needs. Transp. Res. Part D Transp. Environ. 2018, 62, 314–329. [Google Scholar] [CrossRef]
- Morrow, K.; Karner, D.; Francfort, J. Plug-in Hybrid Electric Vehicle Charging Infrastructure Review (U. S. Department of Energy Vehicle Technologies Program—Advanced Vehicle Testing Activity); Idaho National Laboratory (INL): Idaho Falls, ID, USA, 2008.
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Review of recent trends in charging infrastructure planning for electric vehicles. Wiley Interdiscip. Rev. Energy Environ. 2018, 7, e306. [Google Scholar] [CrossRef]
- Dickerman, L.; Harrison, J. A New Car, a New Grid. IEEE Power Energy Mag. 2010, 8, 55–61. [Google Scholar] [CrossRef]
- Badea, G.; Felseghi, R.A.; Varlam, M.; Filote, C.; Culcer, M.; Iliescu, M.; Răboacă, M. Design and simulation of romanian solar energy charging station for electric vehicles. Energies 2019, 12, 74. [Google Scholar] [CrossRef]
- IEA PVPS. Trends 2015 in Photovoltaic Applications; IEA PVPS: Bangkok, Thailand, 2015. [Google Scholar]
- Nehrir, M.H.; Wang, C.; Strunz, K.; Aki, H.; Ramakumar, R.; Bing, J.; Miao, Z.; Salameh, Z. A review of hybrid renewable/alternative energy systems for electric power generation: Configurations, control, and applications. IEEE Trans. Sustain. Energy 2011, 2, 392–403. [Google Scholar] [CrossRef]
- Strunz, K.; Abbasi, E.; Huu, D.N. DC microgrid for wind and solar power integration. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 115–126. [Google Scholar] [CrossRef]
- Cingoz, F.; Elrayyah, A.; Sozer, Y. Optimized Resource Management for PV-Fuel-Cell-Based Microgrids Using Load Characterizations. IEEE Trans. Ind. Appl. 2016, 52, 1723–1735. [Google Scholar] [CrossRef]
- Varaha, K.; Bharath, S.; Khan, M.A. Applications of Artificial Intelligence Techniques in Engineering 698; Springer: Singapore, 2019. [Google Scholar]
- Kurukuru, V.S.B.; Khan, M.A.; Singh, R. Performance optimization of UPFC assisted hybrid power system. In Proceedings of the 2018 IEEMA Engineer Infinite Conference (eTechNxT), New Delhi, India, 13–14 March 2018; pp. 1–6. [Google Scholar]
- Eren, Y.; Erdinc, O.; Gorgun, H.; Uzunoglu, M.; Vural, B. A fuzzy logic based supervisory controller for an FC/UC hybrid vehicular power system. Int. J. Hydrog. Energy 2009, 34, 8681–8694. [Google Scholar] [CrossRef]
- Badawy, M.O.; Sozer, Y. Power Flow Management of a Grid Tied PV-Battery System for Electric Vehicles Charging. IEEE Trans. Ind. Appl. 2017, 53, 1347–1357. [Google Scholar] [CrossRef]
- Carbone, R. Grid-connected photovoltaic systems with energy storage. In Proceedings of the 2009 International Conference on Clean Electrical Power (ICCEP), Capri, Italy, 9–11 June 2009; pp. 760–767. [Google Scholar]
- Beltran, H.; Pérez, E.; Aparicio, N.; Rodriguez, P. Daily solar energy estimation for minimizing energy storage requirements in PV power plants. IEEE Trans. Sustain. Energy 2013, 4, 474–481. [Google Scholar] [CrossRef]
- F. OECD/IEA. Medium-Term Market Report/Aut; IEA: Paris, France, 2014. [Google Scholar]
- Deb, S.; Tammi, K.; Kalita, K.; Mahanta, P. Impact of electric vehicle charging station load on distribution network. Energies 2018, 11, 178. [Google Scholar] [CrossRef]
- Bauer, P.; Zhou, Y.; Doppler, J.; Stembridge, N. Charging of Electric Vehicles and Impact on the Grid. In Proceedings of the 13th Mechatronika 2010, Trencianske Teplice, Slovakia, 2–4 June 2010; pp. 121–127. [Google Scholar]
- SAE. SAE Electric Vehicle and Plug-in Hybrid Electric Vehicle Conductive Charge Coupler J1772; SAE: Warrendale, PA, USA; Troy, MI, USA, 2010. [Google Scholar]
- IEC 62196. Plugs, Socket-Outlets, Vehicle Connectors and Vehicle Inlets—Conductive Charging of Electric Vehicles—Part 1, 2, 3; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- IEC 61851. Electric Vehicle Conductive Charging System—Part 1, 21, 23, 24; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- Kubel, M. Design Guide for Combined Charging System; CharIN e.V: Berlin, Germany, 2015. [Google Scholar]
- CHA Association. Technical Specifications of Quick Charger for the Electric Vehicle; CHA Association: Washington, DC, USA, 2010. [Google Scholar]
- Tesla EV Charging and Supercharging Technique. 2019. Available online: www.teslamotors.com (accessed on 24 April 2019).
- Messagie, M.; Boureima, F.-S.; Coosemans, T.; Macharis, C.; van Mierlo, J. A Range-Based Vehicle Life Cycle Assessment Incorporating Variability in the Environmental Assessment of Different Vehicle Technologies and Fuels. Energies 2014, 7, 1467–1482. [Google Scholar] [CrossRef]
- Messenger, R.A.; Abtahi, A. Photovoltaic Systems Engineering; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Stapleton, G.; Neill, S. Grid-Connected Solar Electric Systems: The Earthscan Expert Handbook for Planning, Design and Installation; Routledge: Abingdon, UK, 2011. [Google Scholar]
- Carli, G.; Williamson, S.S. Technical Considerations on Power Conversion for Electric and Plug-in Hybrid Electric Vehicle Battery Charging in Photovoltaic Installations. IEEE Trans. Power Electron. 2013, 28, 5784–5792. [Google Scholar] [CrossRef]
- Rasin, Z.; Rahman, M.F.; Teknikal, U. Grid-connected Quasi-Z-Source PV Inverter for ElectricVehicle Charging Station. In Proceedings of the International Conference on Renewable Energy Research and Applications, Madrid, Spain, 20–23 October 2013; pp. 627–632. [Google Scholar]
- Rasin, Z.; Ahsanullah, K.; Rahman, M.F. Design and Simulation of Quasi-Z-Source Grid-connected PV Inverter with Bidirectional Power Flow for Battery Storage Management. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; pp. 1589–1594. [Google Scholar]
- Rydh, C.J.; Sandén, B.A. Energy analysis of batteries in photovoltaic systems. Part II: Energy return factors and overall battery efficiencies. Energy Convers. Manag. 2005, 46, 1980–2000. [Google Scholar] [CrossRef]
- Chiang, S.J.; Chang, K.T.; Yen, C.Y. Residential Photovoltaic Energy Storage System. IEEE Trans. Ind. Electron. 1998, 45, 385–394. [Google Scholar] [CrossRef]
- Riffonneau, Y.; Bacha, S.; Barruel, F.; Ploix, S. Optimal power flow management for grid connected PV systems with batteries. IEEE Trans. Sustain. Energy 2011, 2, 309–320. [Google Scholar] [CrossRef]
- Bagula, A.; Castelli, L.; Zennaro, M. On the Design of Smart Parking Networks in the Smart Cities: An Optimal Sensor Placement Model. Sensors 2015, 15, 15443–15467. [Google Scholar] [CrossRef] [PubMed]
- Macal, C.M.; North, M.J. Tutorial on Agent-based Modeling and Simulation. In Proceedings of the 37th Winter Simulation Conference, Orlando, FL, USA, 4–7 December 2005; pp. 2–15. [Google Scholar] [CrossRef]
- Hutson, C.; Venayagamoorthy, G.K.; Corzine, K.A. Intelligent Scheduling of Hybrid and Electric Vehicle Storage Capacity in a Parking Lot for Profit Maximization in Grid Power Transactions. In Proceedings of the 2008 IEEE Energy 2030 Conference, Atlanta, GA, USA, 17–18 November 2008; pp. 1–8. [Google Scholar]
- Kennedy, J. Particle Swarm Optimization. In Encyclopedia of Machine Learning; Springer: Berlin, Germany, 2010; pp. 745–817. [Google Scholar]
- Valle, Y.; Venayagamoorthy, G.K.; Mohagheghi, S.; Jean-Carlos Hernandez, R.G. Harley, Particle Swarm Optimization: Basic Concepts, Variants and Applications in Power Systems. IEEE Trans. Evol. Comput. 2008, 12, 171–195. [Google Scholar] [CrossRef]
- Mahindra Everito. Available online: http://www.mahindraverito.com/everito/discover-the-new-verito.aspx (accessed on 5 May 2019).
- Li, G.; Liu, C.C.; Mattson, C.; Lawarrée, J. Day-ahead electricity price forecasting in a grid environment. IEEE Trans. Power Syst. 2007, 22, 266–274. [Google Scholar] [CrossRef]
- Pindoriya, N.M.; Singh, S.N.; Singh, S.K. An adaptive wavelet neural network-based energy price forecasting in electricity markets. IEEE Trans. Power Syst. 2008, 23, 1423–1432. [Google Scholar] [CrossRef]
- Mazadi, M.; Rosehart, W.; Zareipour, H. Impact of Wind Generation on Electricity Markets: A Chance-Constrained Nash Cournot model. Iran. J. Sci. Technol. Trans. Electr. Eng. 2012, 36, 51–66. [Google Scholar]
- Hoke, A.; Brissette, A.; Smith, K.; Pratt, A.; Maksimovic, D. Accounting for lithium-ion battery degradation in electric vehicle charging optimization. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 691–700. [Google Scholar] [CrossRef]
- Motamedi, A.; Zareipour, H.; Rosehart, W.D. Electricity price and demand forecasting in smart grids. IEEE Trans. Smart Grid 2012, 3, 664–674. [Google Scholar] [CrossRef]
- Liu, S.; Wang, J.; Liu, Q.; Tang, J.; Liu, H.; Fang, Z. Deep-Discharging Li-Ion Battery State of Charge Estimation Using a Partial Adaptive Forgetting Factors Least Square Method. IEEE Access 2019, 7, 47339–47352. [Google Scholar] [CrossRef]
- Yang, Y.; Hu, X.; Qing, D.; Chen, F. Arrhenius equation-based cell-health assessment: Application to thermal energy management design of a HEV NiMH battery pack. Energies 2013, 6, 2709–2725. [Google Scholar] [CrossRef]
- Markel, T.; Smith, K.; Pesaran, A.A. Improving Petroleum Displacement Potential of PHEVs Using Enhanced Charging Scenarios; Elsevier: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Xu, B. Degradation-Limiting Optimization of Battery Energy Storage Systems Operation; Location Power Systems Laboratory ETH Zurich: Zürich, Switzerland, 2013. [Google Scholar]
- Detailed Model of a 100-kW Grid-Connected PV Array—MATLAB & Simulink—MathWorks France. Available online: https://fr.mathworks.com/help/physmod/sps/examples/detailed-model-of-a-100-kw-grid-connected-pv-array.html (accessed on 5 May 2019).
- Ma, C.; Marten, F.; Töbermann, J.; Braun, M.; Iwes, F. Evaluation of Modeling and Simulation Complexity on Studying the Impacts of Electrical Vehicles Fleets in Distribution Systems. In Proceedings of the 2014 Power Systems Computation Conference, Wroclaw, Poland, 18–22 August 2014. [Google Scholar]
- Mouli, G.R.C. Charging Electric Vehicles from Solar Energy: Power Converter, Charging Algorithm and System Design. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2018. [Google Scholar]
- Mouli, G.R.C.; Bauer, P.; Zeman, M. System design for a solar powered electric vehicle charging station for workplaces. Appl. Energy 2016, 168, 434–443. [Google Scholar] [CrossRef]
- Apostolaki-Iosifidou, E.; Codani, P.; Kempton, W. Measurement of power loss during electric vehicle charging and discharging. Energy 2017, 127, 730–742. [Google Scholar] [CrossRef]
- Wu, T.F.; Chang, C.H.; Chang, Y.D.; Lee, K.Y. Power loss analysis of grid connection photovoltaic systems. In Proceedings of the 2009 International Conference on Power Electronics and Drive Systems (PEDS), Taipei, Taiwan, 2–5 November 2009; pp. 326–331. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Rating |
|---|---|
| Solar Array | 20 kW |
| Boost Converter | 5 kHz, 500 V |
| DC link Voltage | 500 V |
| Grid Parameters | 2500 MVA, 120 kV |
| High Frequency Transformer | 25 kva, 5 kHz, 500:80:80, three winding transformer |
| Electric Vehicle | Mahindra severity |
| EV Battery | Lithium Battery Nominal Voltage = 72 V Rated Capacity = 200 Ah |
| Energy Storage Device | Rated Power = 150 kW Power Conversion Efficiency = 90% |
| Parameters | Value |
|---|---|
| No of particles in swarm | 24 |
| No of iterations | 30 |
| Parameters to be identified | 2 |
| Search Space Range | [0 50; 0 10]; |
| Swarm declaration | Zero |
| Velocity Clamping | [3; 1]; |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jha, M.; Blaabjerg, F.; Khan, M.A.; Bharath Kurukuru, V.S.; Haque, A. Intelligent Control of Converter for Electric Vehicles Charging Station. Energies 2019, 12, 2334. https://doi.org/10.3390/en12122334
Jha M, Blaabjerg F, Khan MA, Bharath Kurukuru VS, Haque A. Intelligent Control of Converter for Electric Vehicles Charging Station. Energies. 2019; 12(12):2334. https://doi.org/10.3390/en12122334
Chicago/Turabian StyleJha, Mayank, Frede Blaabjerg, Mohammed Ali Khan, Varaha Satya Bharath Kurukuru, and Ahteshamul Haque. 2019. "Intelligent Control of Converter for Electric Vehicles Charging Station" Energies 12, no. 12: 2334. https://doi.org/10.3390/en12122334
APA StyleJha, M., Blaabjerg, F., Khan, M. A., Bharath Kurukuru, V. S., & Haque, A. (2019). Intelligent Control of Converter for Electric Vehicles Charging Station. Energies, 12(12), 2334. https://doi.org/10.3390/en12122334