Multiphase Flow Effects in a Horizontal Oil and Gas Separator


Abstract
1. Introduction
2. Methodology
- Governing equations, including an overview of the Navier–Stokes equations, turbulence models, and interface tracking methods (for multiphase flows);
- Geometry and mesh generation;
- Boundary and initial conditions.
2.1. Governing Equations
2.2. Boundary Conditions
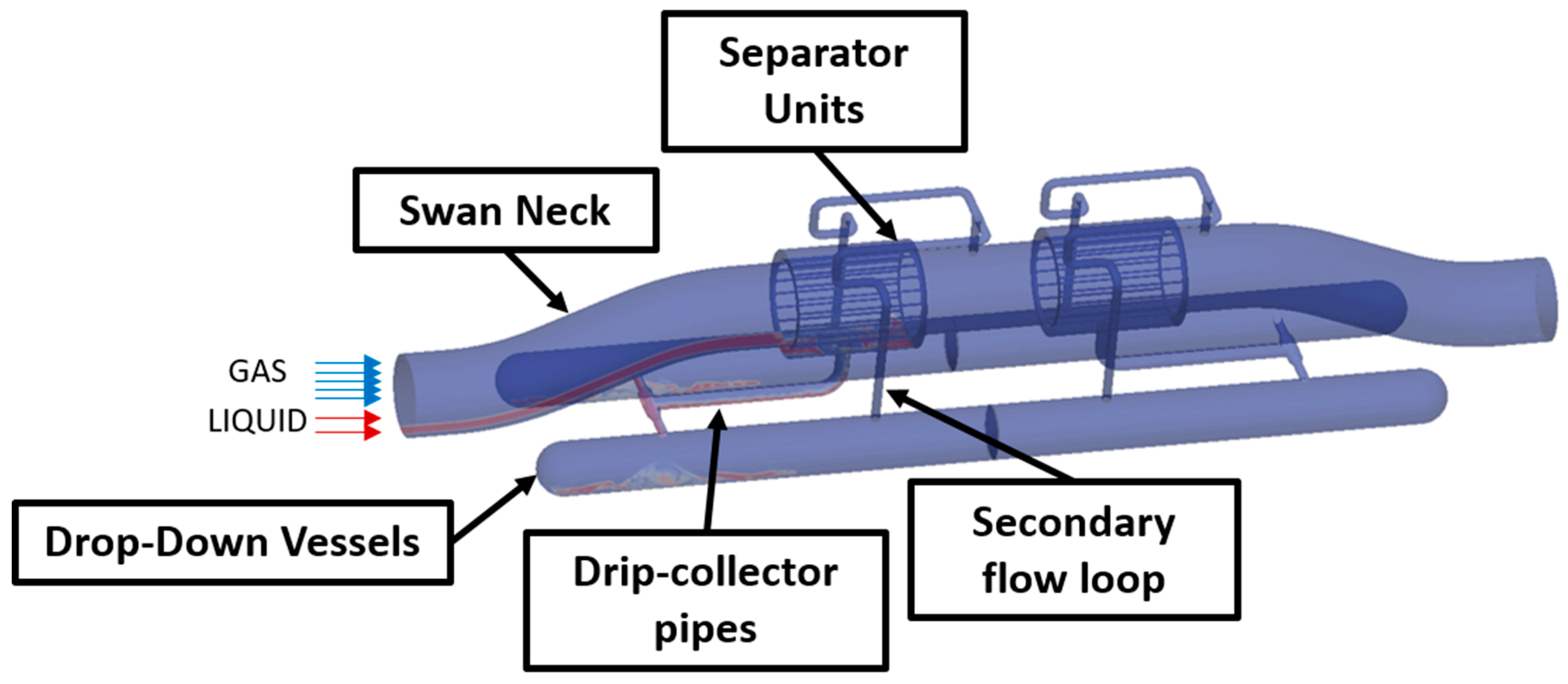
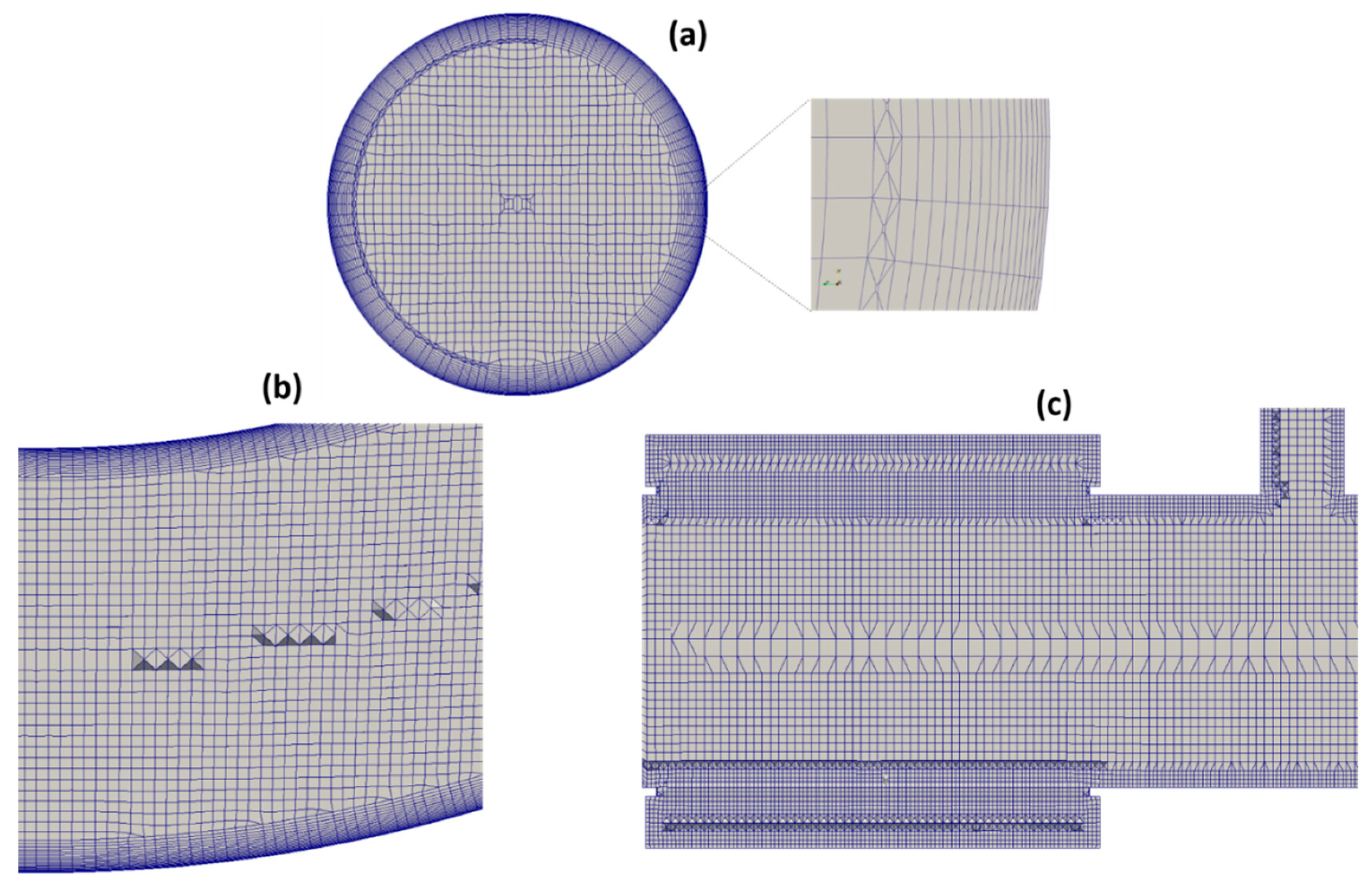
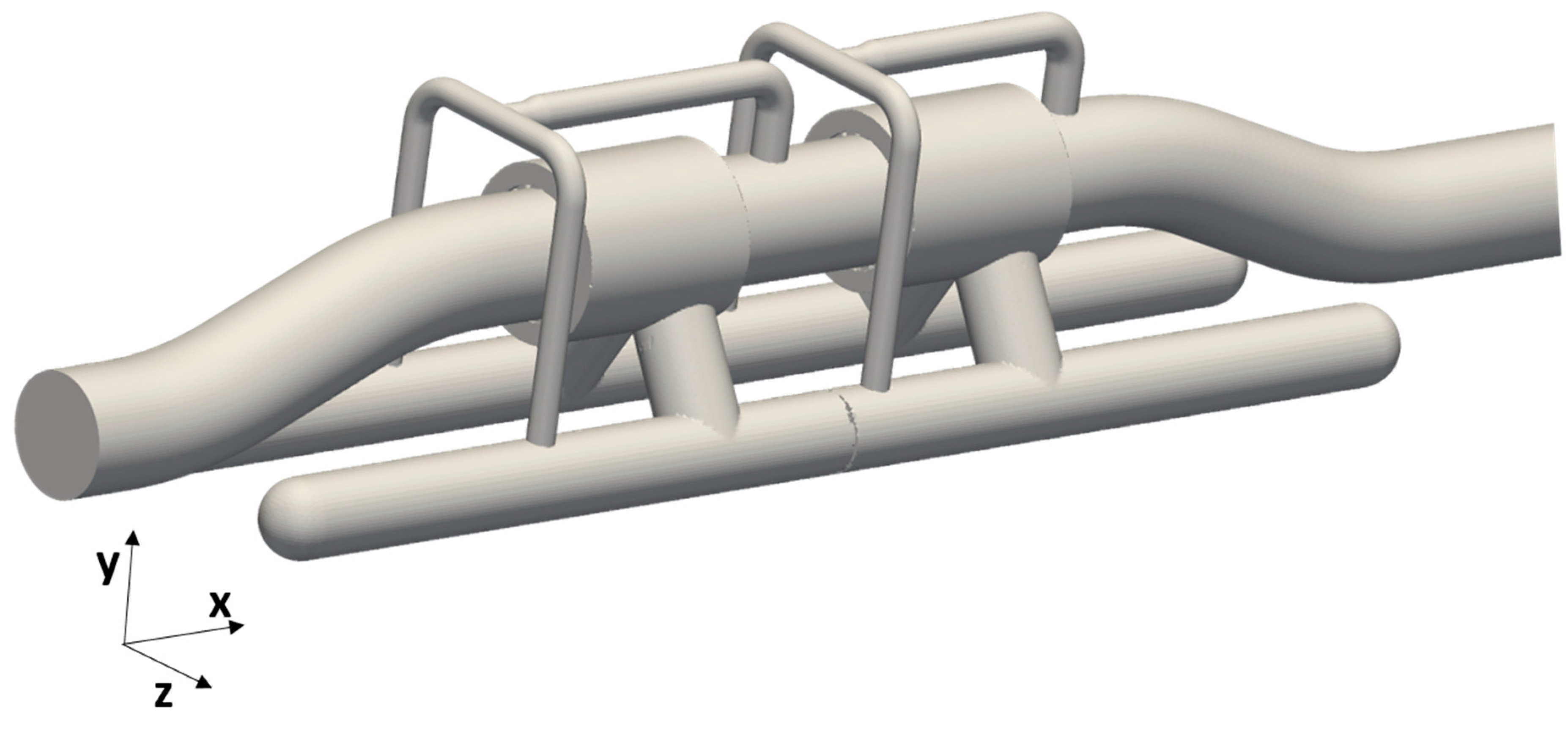
2.3. Geometry and Grid Generation
2.4. Validation
3. Results
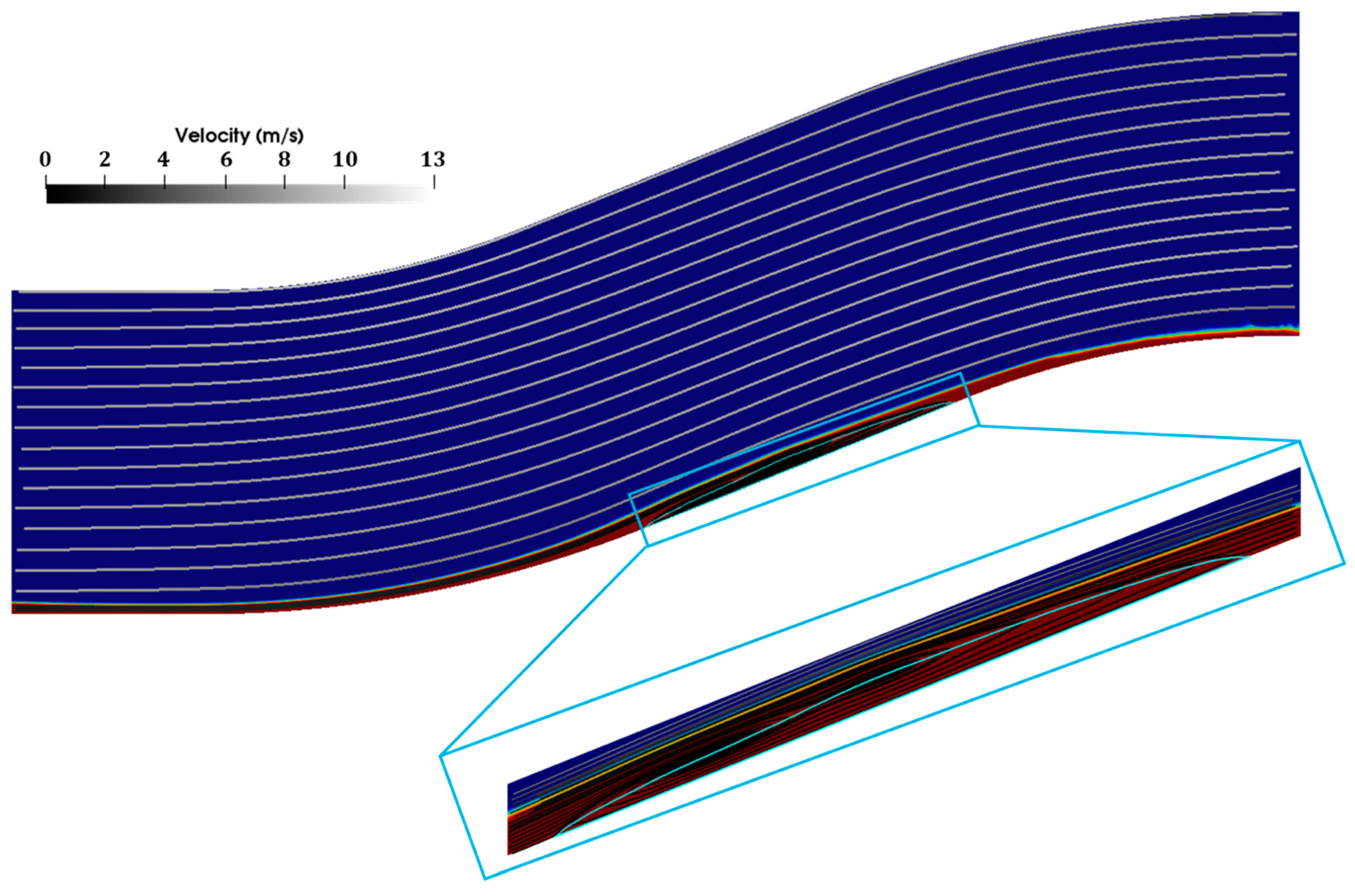
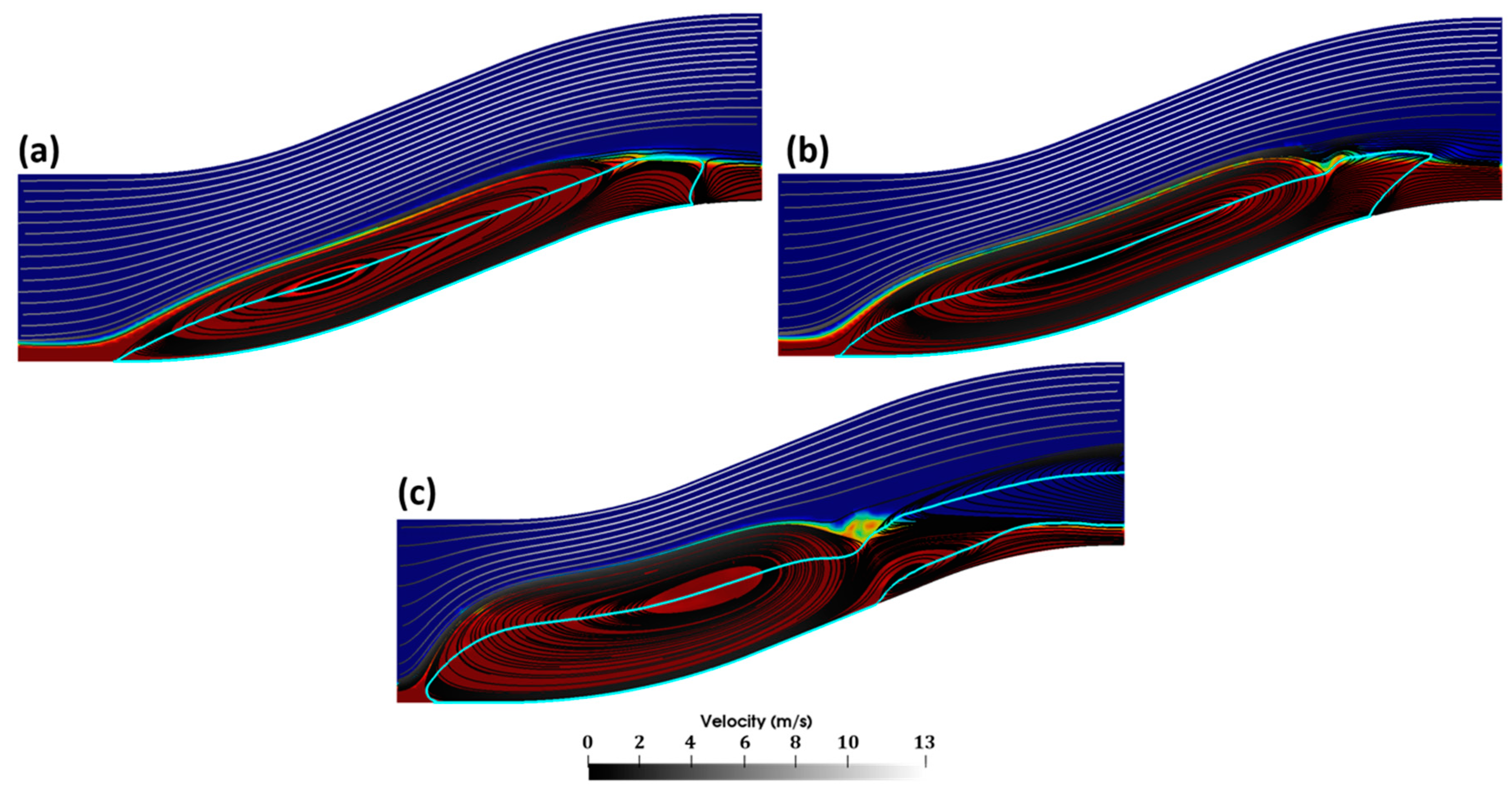
3.1. Swan Neck
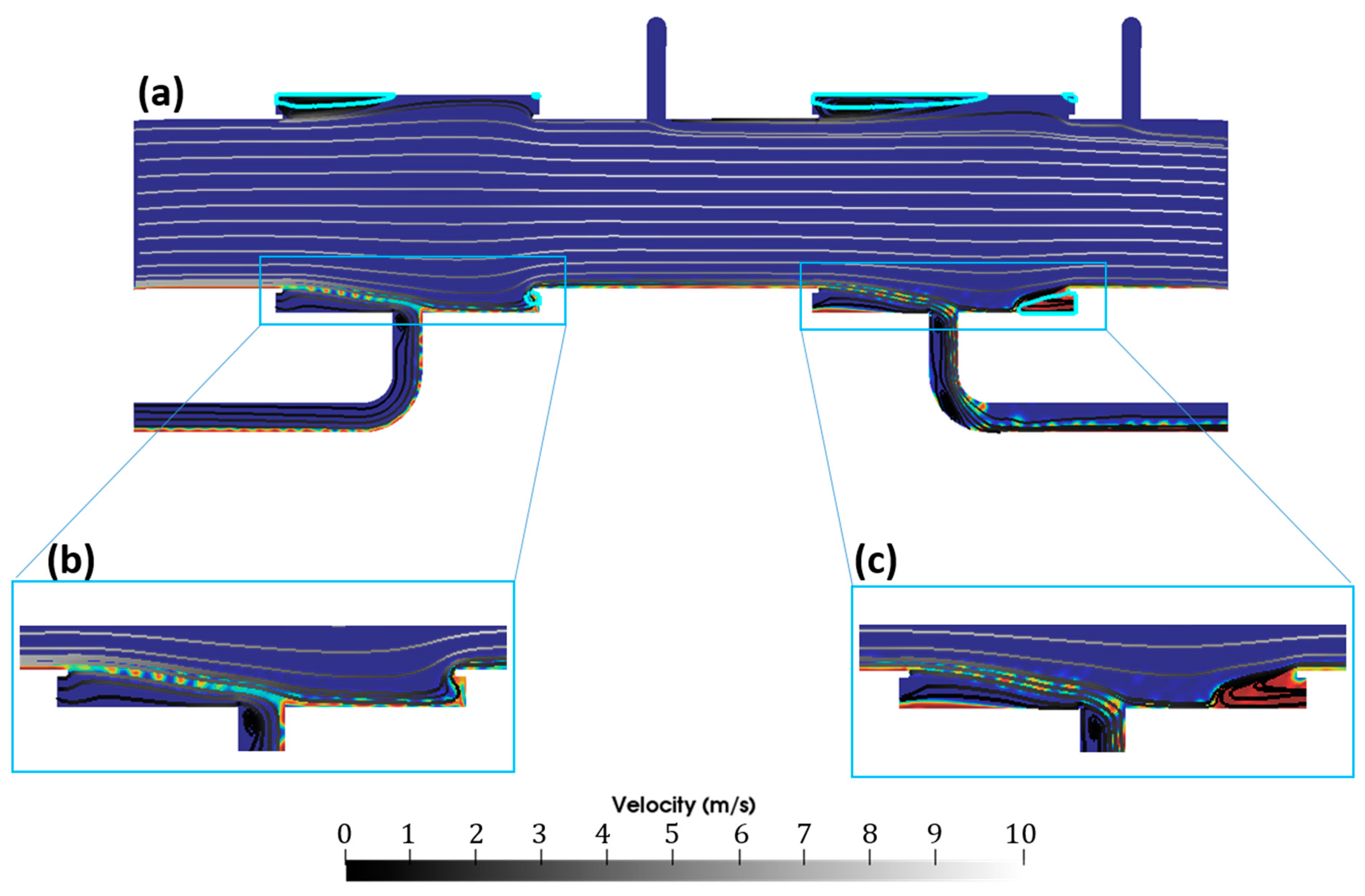
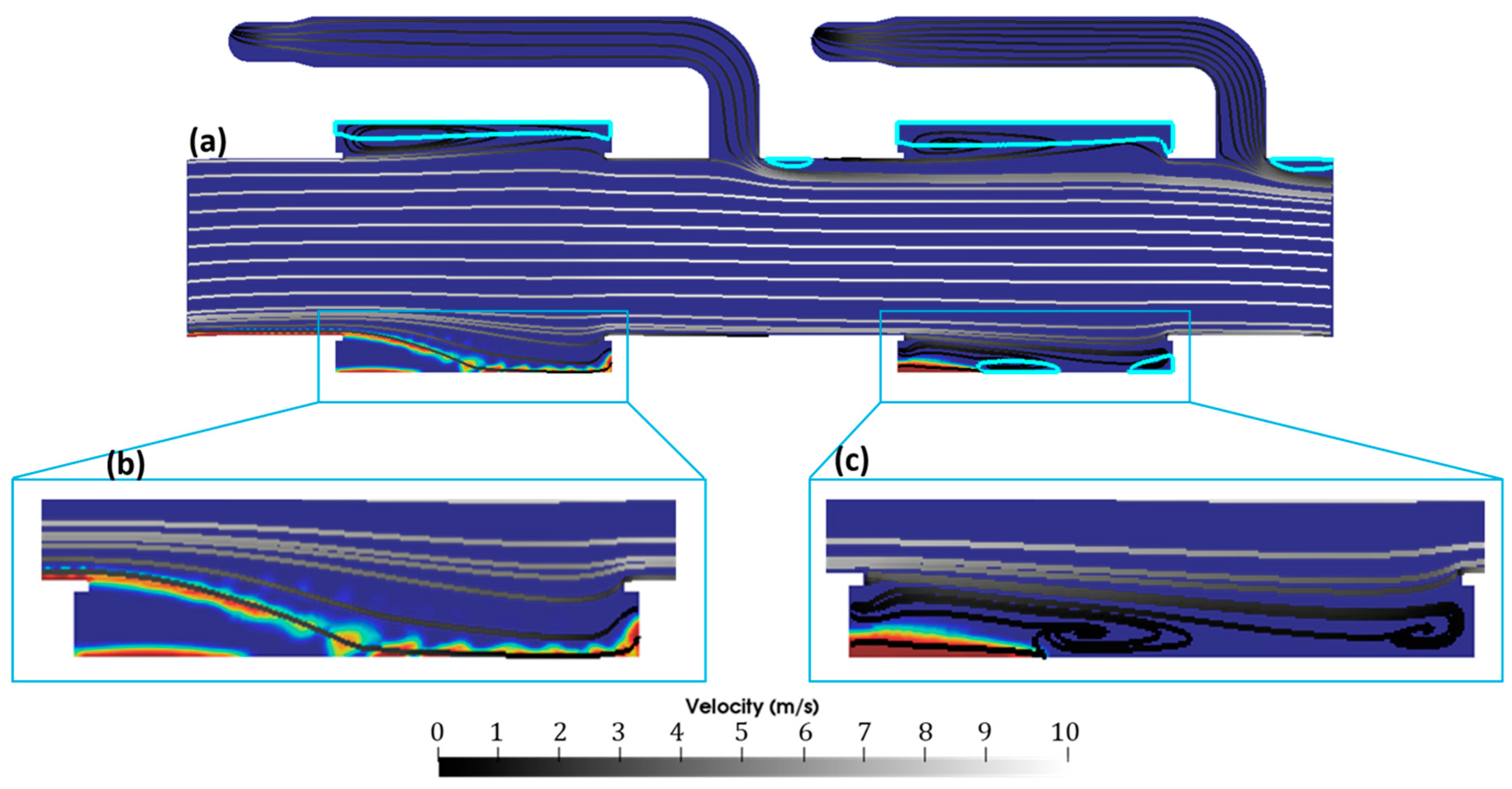
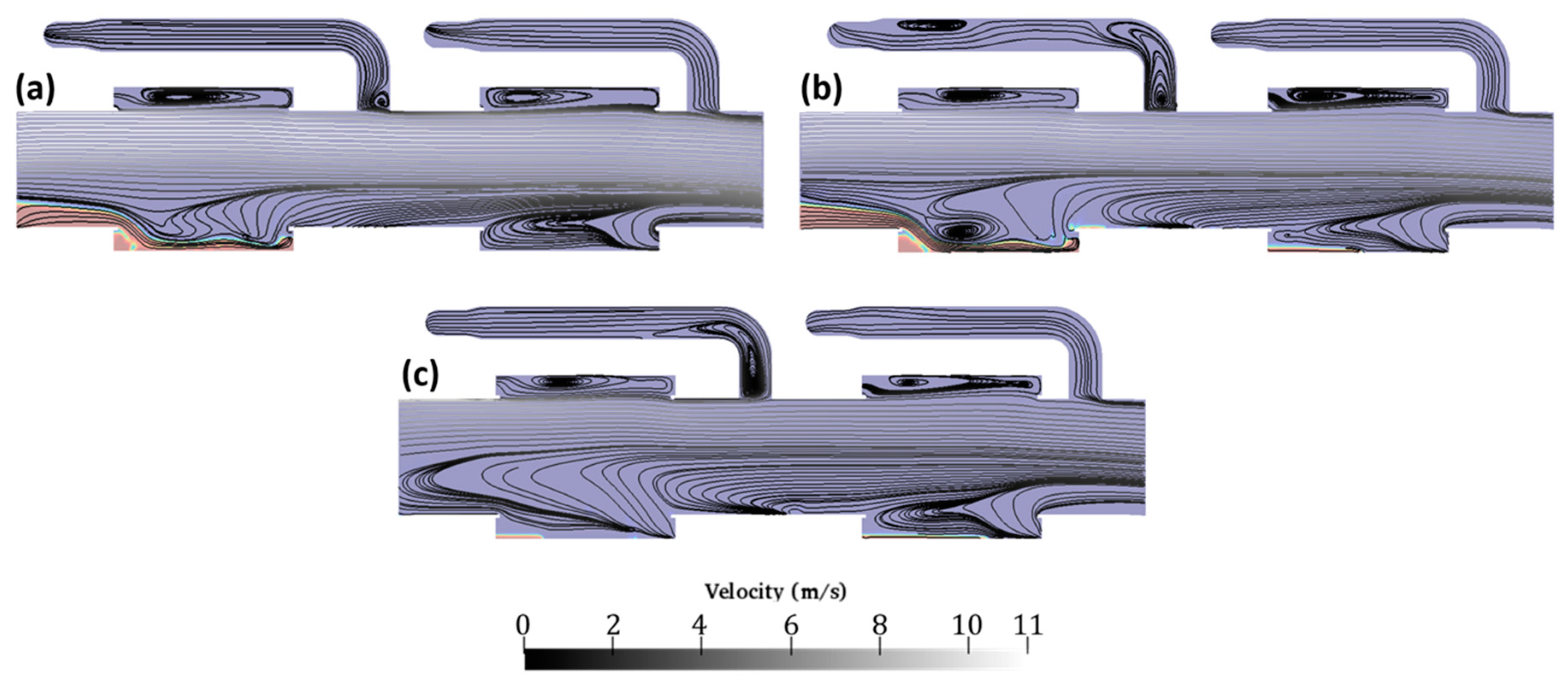
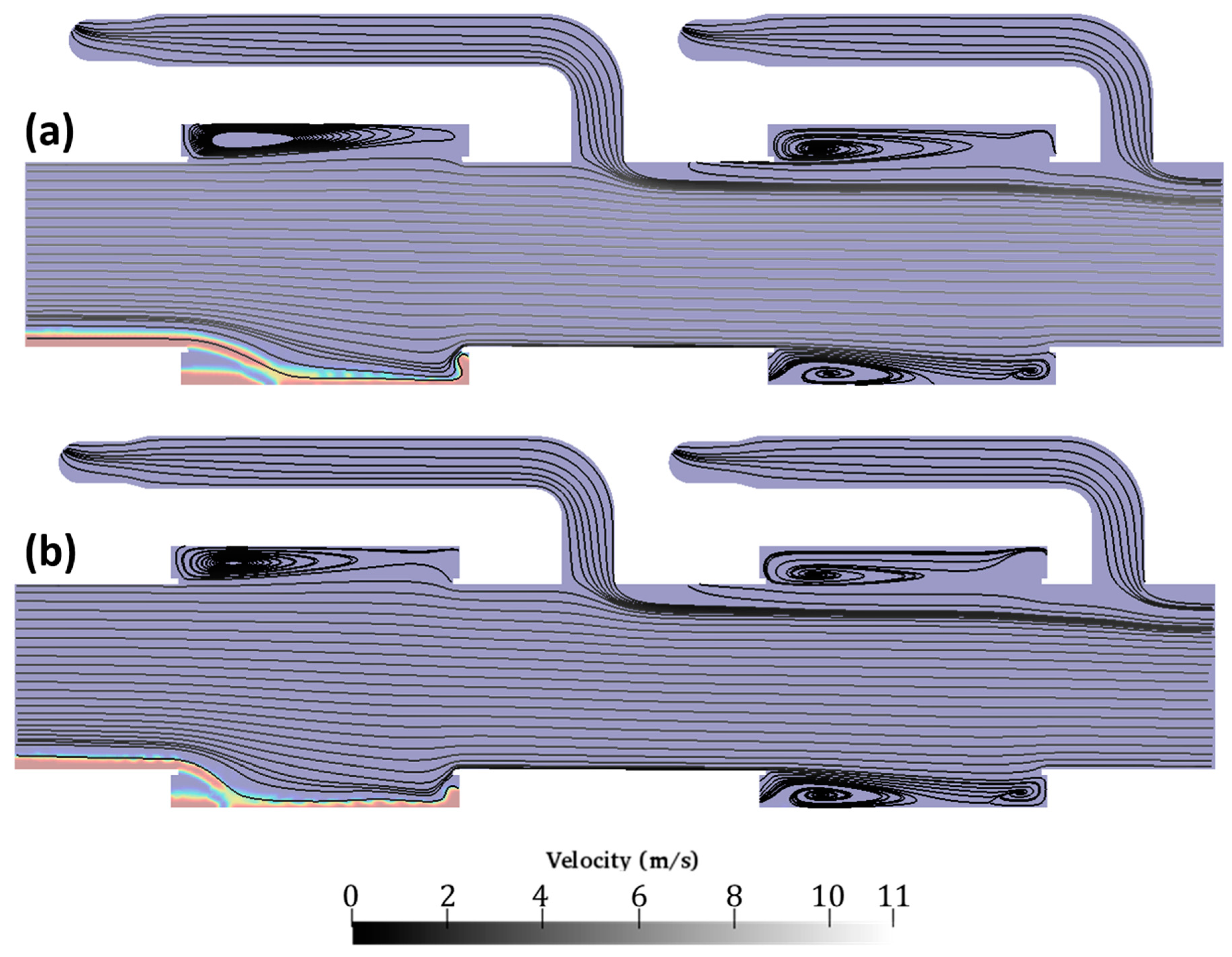
3.2. Flow in Separators
- The pipes leading to the dropdown vessel were moved closer to the right walls of the separators.
- The diameter of the drip-collector pipes leading to the dropdown vessel was increased significantly.
- The drip-collector pipes comprise a single straight part, diagonally connecting each separator with a drop-down vessel, rather than having one horizontal and vertical pipe, connected by an elbow.
4. Conclusions
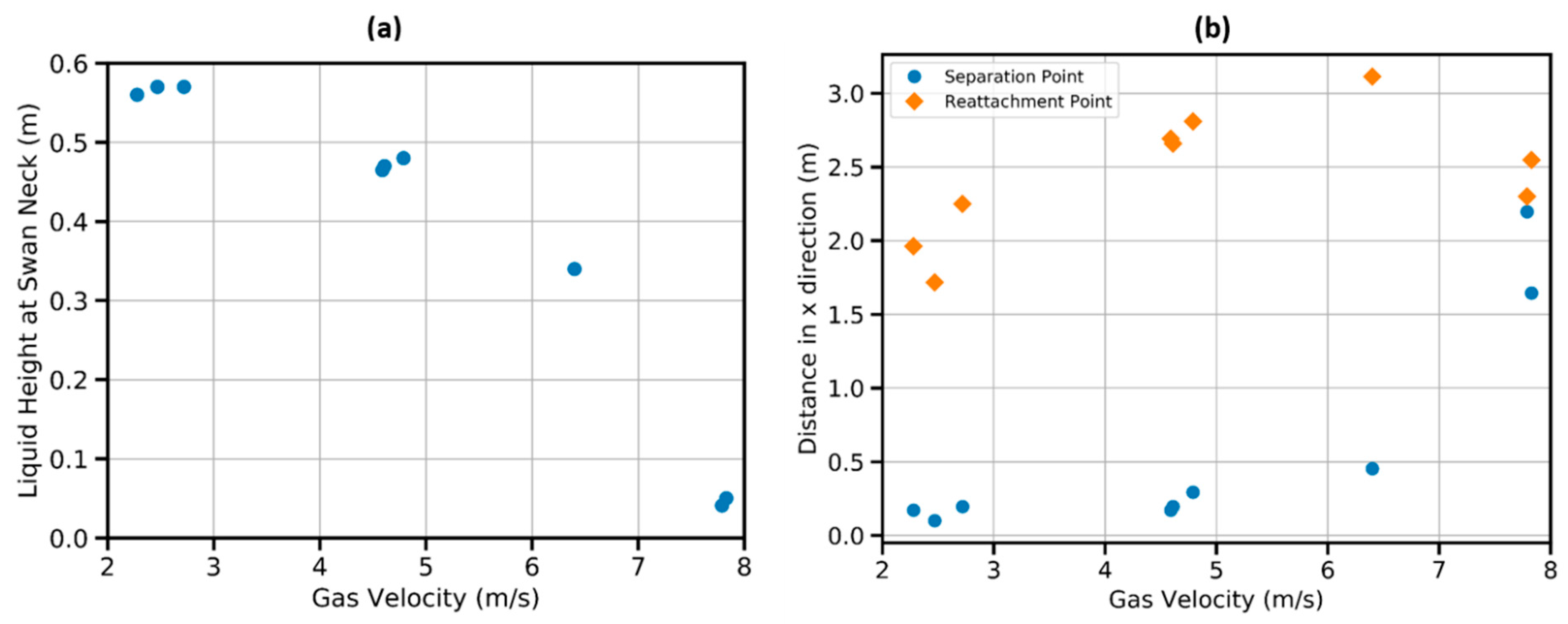
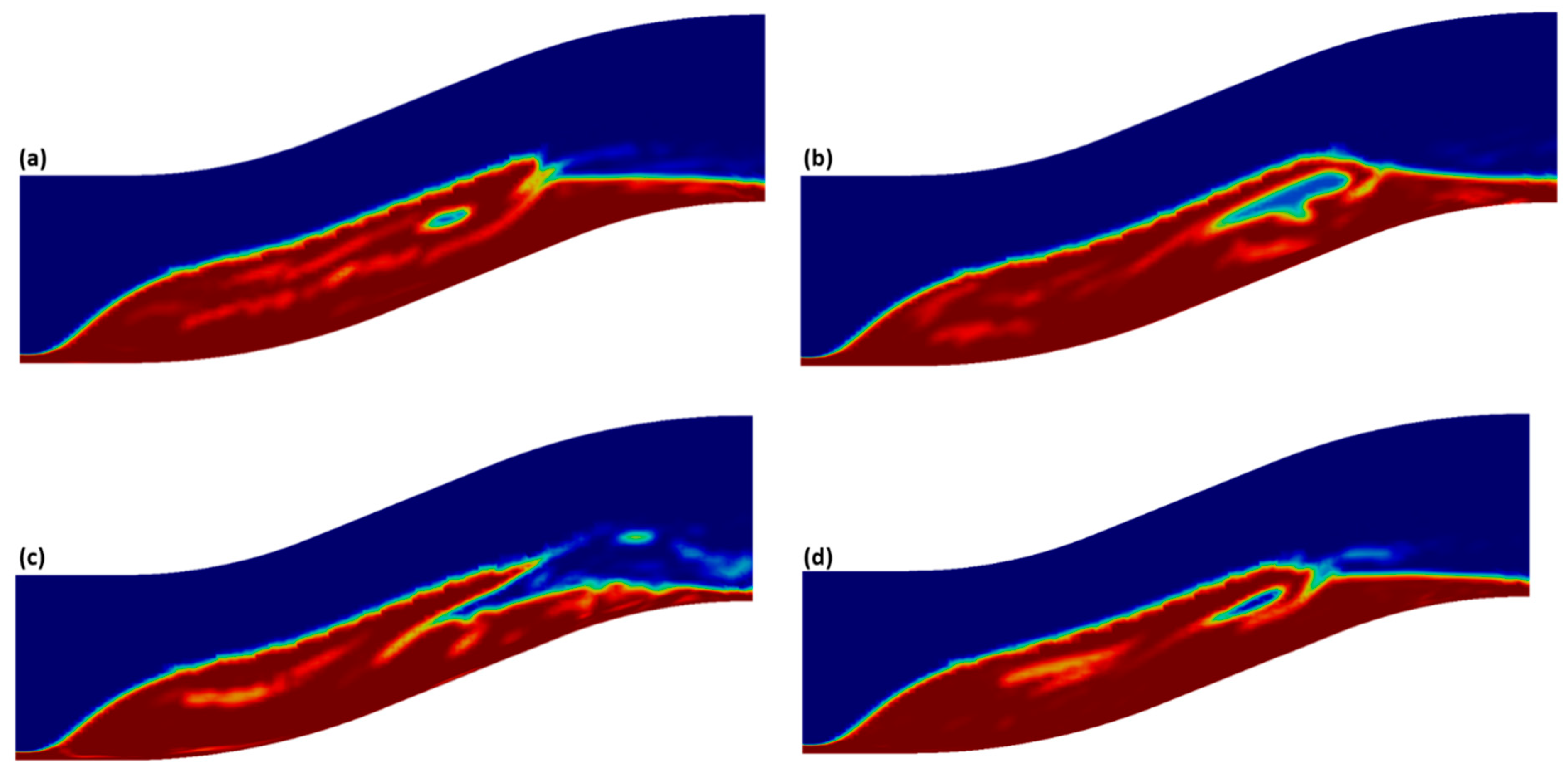
- The flow physics at the swan neck depend primarily on the gas velocity. For gas velocities greater than 7 m/s, the flow presents only a minor separation bubble at the centre of the swan neck. For lower gas velocities, the liquid detaches from the wall half way up the swan neck, and starts to accumulate next to the inlet, until the liquid reaches the top of the swan neck. Generally, for gas velocities less than 7 m/s, the separation point is at the bottom of the swan neck, next to the inlet. The position of the re-attachment point moves further up the swan neck as the velocity increases. For velocities higher than 7 m/s, both the separation and re-attachment points are close to the centre of the swan neck, at a distance approximately 1.5 m away from the inlet.
- The liquid height at the swan neck shows a parabolic decrease as a function of the gas velocity at the inlet. For the same liquid height at the inlet, changing the gas velocity from to resulted in a reduction of the liquid height at the swan neck, from to , respectively. The gas is compressed and accelerated by the liquid crest, after which it re-expands often forming vortical structures at the top of the swan neck. These vortices tend to disperse liquid into the gas, reducing the efficiency of the separator by up to 5% compared to equivalent cases with higher gas velocities.
- The location of the drip-collector pipes significantly affects the efficiency of the separator at high gas velocities. Specifically, increasing the diameter of the pipes and placing them at the far right, bottom surface of each separator, as is the case for the second design considered here, significantly increases the separator’s efficiency.
- If a straight, horizontal pipe replaces the swan neck, the vertical flow patterns identified above are alleviated, and the efficiency of the separator is near ideal bulk liquid removal efficiency.
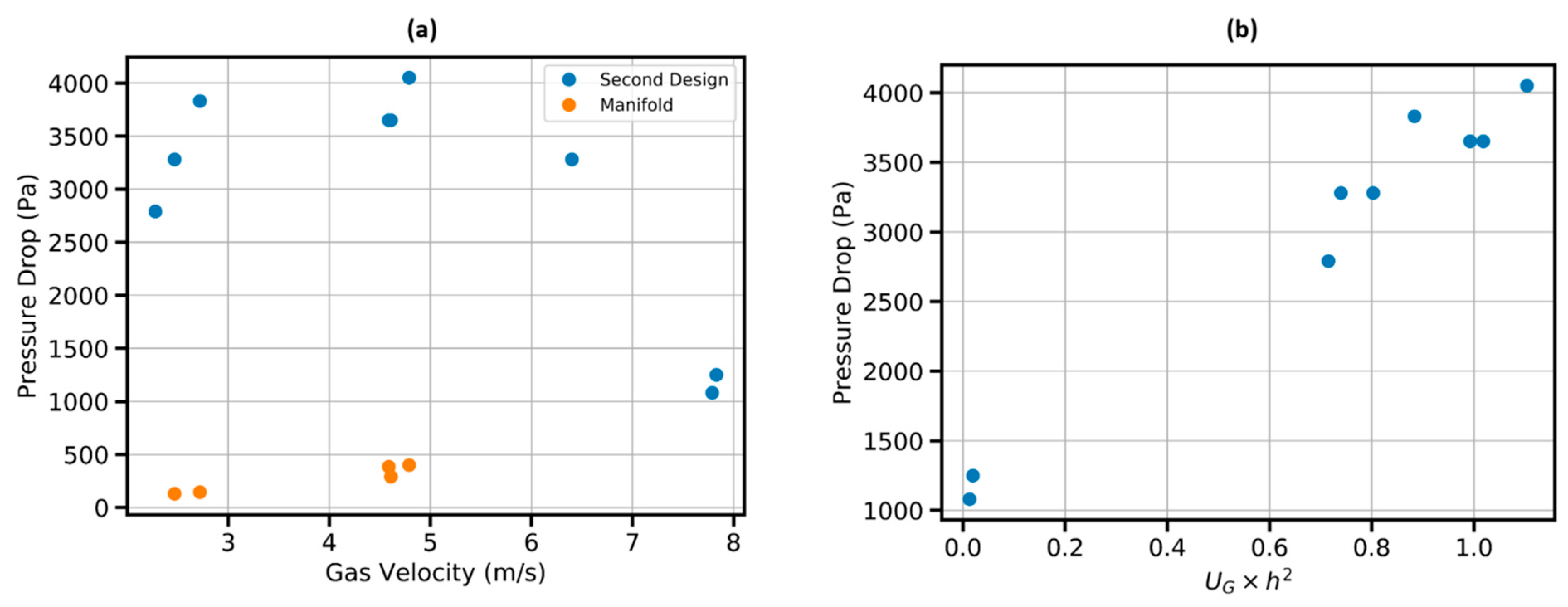
- In the absence of a swan neck, the pressure drop across the system is approximately an order of magnitude less. Furthermore, when considering a straight pipe, the pressure drop increases marginally with increasing velocity, which is the expected behaviour. By contrast, in the presence of a swan neck, the pressure drop is often higher for lower velocities. The reason for this is the aforementioned compression of the gas at the swan neck and subsequent formation of vortices near the first separator unit that restrict the flow.
Author Contributions
Funding
Conflicts of Interest
References
- Sivalls, C.R. Oil and Gas Separation Design Manual; Sivalls Incorporated: Williston, ND, USA, 1987. [Google Scholar]
- Stewart, A.; Chamberlain, N.; Irshad, M. A new approach to gas-liquid separation. In Proceedings of the European Petroleum Conference, The Hague, The Netherlands, 20–22 October 1998. [Google Scholar]
- Powers, M.L. Analysis of gravity separation in freewater knockouts. In Proceedings of the SPE Production Engineering, New Orleans, Louisiana, 23–26 September 1990; Volume 5, pp. 52–58. [Google Scholar]
- Rosa, E.; Franca, F.; Ribeiro, G. The cyclone gas--liquid separator: Operation and mechanistic modeling. J. Pet. Sci. Eng. 2001, 32, 87–101. [Google Scholar] [CrossRef]
- Entress, J.; Pridden, D.; Baker, A. The current state of development of the VASPS subsea separation and pumping system. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 1991. [Google Scholar]
- Kouba, G.E.; Shoham, O.; Shirazi, S. Design and performance of gas-liquid cylindrical cyclone separators. In Proceedings of the BHR Group 7th International Meeting on Multiphase Flow, Cannes, France, 7–9 June 1995. [Google Scholar]
- Feng, J.; Chang, Y.; Peng, X.; Qu, Z. Investigation of the oil—Gas separation in a horizontal separator for oil-injected compressor units. Proc. Inst. Mech. Eng. Part A J. Power Energy 2008, 222, 403–412. [Google Scholar] [CrossRef]
- HWeller, G.; Tabor, G.; Jasak, H.; Fureby, C. A tensorial approach to computational continuum mechanics using object-oriented techniques. Comput. Phys. 1998, 12, 620–631. [Google Scholar] [CrossRef]
- Menter, F.; Esch, T. Elements of Industrial Heat Transfer Prediction. In Proceedings of the 16th Brazilian Congress of Mechanical Engineering (COBEM), Uberlandia, Minas Gerais, Brazil, 26–30 November 2001. [Google Scholar]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Menter, F.R.; Kuntz, M.; Langtry, R. Ten years of industrial experience with the SST turbulence model. Turbul. Heat Mass Transf. 2003, 4, 625–632. [Google Scholar]
- Yeoh, G.H.; Tu, J. Computational Techniques for Multiphase Flows; Butterworth-Heinemann: Oxford, UK, 2019. [Google Scholar]
- Rusche, H. Computational Fluid Dynamics of Dispersed Two-Phase Flows at High Phase Fractions; Imperial College London (University of London): London, UK, 2003. [Google Scholar]
- Bendiksen, K.H.; Maines, D.; Moe, R.; Nuland, S. The dynamic two-fluid model OLGA: Theory and application. SPE Prod. Eng. 1991, 6, 171–180. [Google Scholar] [CrossRef]
- Taitel, Y.; Dukler, A. A model for predicting flow regime transitions in horizontal and near horizontal gas-liquid flow. AIChE J. 1976, 22, 47–55. [Google Scholar] [CrossRef]
- Cebeci, T.; Mosinskis, G.; Smith, A.O. Calculation of separation points in incompressible turbulent flows. J. Aircr. 1972, 9, 618–624. [Google Scholar] [CrossRef]
- Drikakis, D. Bifurcation phenomena in incompressible sudden expansion flows. Phys. Fluids 1997, 9, 76–87. [Google Scholar] [CrossRef]
- Neofytou, P.; Drikakis, D. Non-Newtonian flow instability in a channel with a sudden expansion. J. Non-Newton. Fluid Mech. 2003, 111, 127–150. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fluid Dynamics Equations | Compressible Reynolds-Averaged Navier-Stokes (RANS) Equations (Continuity, Momentum and Energy) |
|---|---|
| Turbulence model | |
| Equation of state | Peng Robinson |
| Multiphase model | Volume of fluid (homogeneous model) |
| Velocity | Pressure | Temperature | Phase Volume Fractions | |
|---|---|---|---|---|
| Inlet | Fixed value | Zero-Gradient | Fixed Value | Fixed Value |
| Outlets | Zero-Gradient | Fixed Value | Zero –Gradient | Zero-Gradient |
| Solid Surfaces | No-Slip | Zero-Gradient | Zero-Gradient | Zero-Gradient |
| Initial Condition | Inlet Value | Outlet Value | Inlet Value | Only Gas |
| Case | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | 4.49 | 0.00145 | 0.58353 | 0.0018 | 7.7 | 1.05 | 7.67 | 0.0025 | 0.004 |
| 2 | 4.52 | 0.0113 | 0.5779 | 0.0074 | 7.83 | 1.52 | 7.72 | 0.0193 | 0.032 |
| 3 | 3.55 | 0.04 | 0.5553 | 0.03 | 6.4 | 1.34 | 6.07 | 0.0683 | 0.082 |
| 4 | 4.51 | 0.0084 | 0.5794 | 0.0059 | 7.79 | 1.43 | 7.71 | 0.0144 | 0.028 |
| 5 | 2.65 | 0.009 | 0.5753 | 0.01 | 4.61 | 0.9 | 4.53 | 0.0154 | 0.036 |
| 6 | 2.66 | 0.035 | 0.5553 | 0.03 | 4.79 | 1.16 | 4.54 | 0.0598 | 0.82 |
| 7 | 2.65 | 0.0071 | 0.5773 | 0.008 | 4.59 | 0.85 | 4.53 | 0.0121 | 0.41 |
| 8 | 1.42 | 0.0036 | 0.5753 | 0.01 | 2.47 | 0.36 | 2.43 | 0.0062 | 0.4 |
| 9 | 1.51 | 0.014 | 0.5553 | 0.03 | 2.72 | 0.48 | 2.58 | 0.0239 | 0.81 |
| 10 | 1.31 | 0.0033 | 0.5743 | 0.011 | 2.28 | 0.3 | 2.24 | 0.0056 | 0.41 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Frank, M.; Kamenicky, R.; Drikakis, D.; Thomas, L.; Ledin, H.; Wood, T. Multiphase Flow Effects in a Horizontal Oil and Gas Separator. Energies 2019, 12, 2116. https://doi.org/10.3390/en12112116
Frank M, Kamenicky R, Drikakis D, Thomas L, Ledin H, Wood T. Multiphase Flow Effects in a Horizontal Oil and Gas Separator. Energies. 2019; 12(11):2116. https://doi.org/10.3390/en12112116
Chicago/Turabian StyleFrank, Michael, Robin Kamenicky, Dimitris Drikakis, Lee Thomas, Hans Ledin, and Terry Wood. 2019. "Multiphase Flow Effects in a Horizontal Oil and Gas Separator" Energies 12, no. 11: 2116. https://doi.org/10.3390/en12112116
APA StyleFrank, M., Kamenicky, R., Drikakis, D., Thomas, L., Ledin, H., & Wood, T. (2019). Multiphase Flow Effects in a Horizontal Oil and Gas Separator. Energies, 12(11), 2116. https://doi.org/10.3390/en12112116