1. Introduction
To solve the environmental pollution problems and ensure the continuous reduction of traditional energy usage, new energy industries have emerged, and are being developed rapidly, especially in the electric vehicle (EV) industry [
1,
2,
3]. As the core technology of EVs, there have been constant breakthroughs in inductive power transfer (IPT) technology [
4]. IPT technology can be employed to realize power transmission from a power source to load devices in a non-contact way via the coupling magnetic field between the primary and secondary coils [
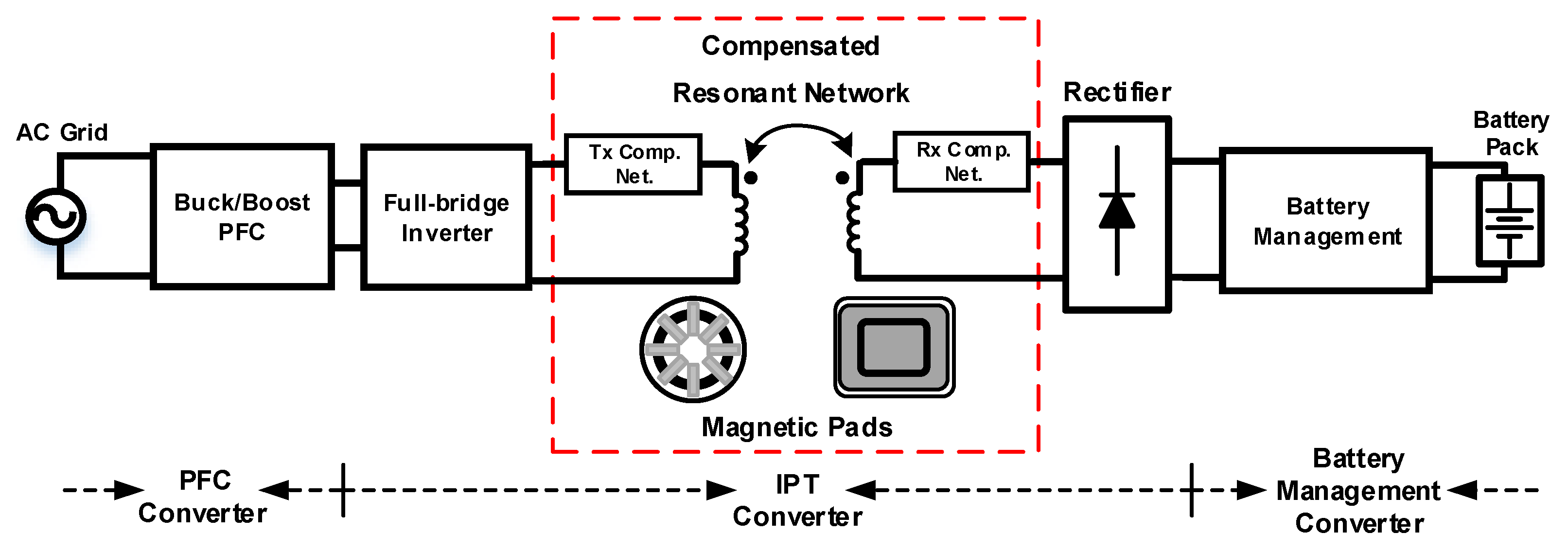
5]. A typical IPT system diagram is shown in
Figure 1. Without the need for direct electrical contact between the primary and secondary sides, IPT technology has the advantages of good environmental adaptability, safety, convenience, and smaller size [
6,
7]. Thus, it largely compensates for the shortcomings associated with conventional cable charging [
8].
In IPT systems, resonance compensation topology is a key component that directly affects the system performance and charging quality [
9,
10]. Conventional basic resonance compensation topologies include series-series (S-S), series-parallel (S-P), parallel-parallel (P-P), and parallel-series (P-S) [
11]. Recently, there have been several studies and analyses on these four resonance topologies, and researchers have begun to try some new topological combinations and analyze some high-order resonance topologies.
In [
12], a new resonant topology called S-CLC are proposed, which has advantages, such as constant output voltage, ease of implementation of zero phase angle (ZPA) [
13], and zero voltage switching (ZVS). In [
14], the design procedure of an optimized parameter for LCCL-S resonant topology is reported. Using the optimized design, high efficiency ZVS operation over an entire load range can be achieved. Meanwhile, comparative studies of different resonance topologies have been reported in some literature. In [
15], under the condition of mutual inductance variations that are caused by misalignment, the S-S and double-sided LCC topologies are compared in terms of output power, efficiency, voltage, and current stress. Based on the analysis and experiments, although the conclusion is that S-S has a higher sensitivity and component stress than double-sided LCC as mutual inductance varies, only double-sided LCC experiments are performed. In [
16], using a varying coupling coefficient k (0.18–0.26), the design methods, volumes, costs, complexities, and efficiencies of series LC (SLC) and hybrid series parallel (LCL) topologies are compared, and the results prove that the LCL topology has higher efficiency, lower capacitance stress, and control complexity than the SLC topology.
During the application of IPT technology, detuning is a universal issue [
17,
18]. Although an ideal charging efficiency can be obtained near the ZPA frequency, the resonance state can easily be broken because of detuning. In both detuning and tuning states, the characteristics and performances of the topology vary significantly [
19]. Detuning is mainly caused by two factors. First, owing to the improper parking of EVs, there are usually misalignments between transmitting and receiving coils, leading to a large drop in the mutual inductance (coupling coefficient) and minor variations in the self-inductances. Secondly, during actual operation, because of high temperatures, oscillations, device manufacturing errors, and some other physical factors, actual parameters (compensation capacitances and inductances) may differ from designed parameters. Both detuning reasons may cause ZPA frequency deviations. Although the compensation topologies may be under the same detuning condition, there are often differences in the actual impacts caused by detuning on different compensation topologies. Therefore, the analysis and comparison of the characteristics of different topologies in the case of detuning not only has practical significances, but can also help to optimize the parameter design of compensation topologies.
In terms of the detuning studies, most of the studies are concerned with detuning that is caused by misalignment between primary and secondary coils. However, there are few studies on detuning that is caused by deviations in compensation components. Therefore, in this study, because S-S and LCCL-S have the same series structures in a secondary loop, the characteristics of S-S and LCCL-S are not only compared in the tuning state, but also compared in the detuning state, which is caused by variations in the secondary compensation capacitances. The deviation factor of the secondary compensation capacitance is defined. The related equations of S-S and LCCL-S in the detuning state are then derived. Next, similarities and differences between the two topologies are compared and summarized based on the excel calculation results. In addition, because it is difficult to compare the efficiencies of S-S and LCCL-S by performing calculations and simulations, a 2.4-kW experimental prototype is configured to compare the efficiencies of S-S and LCCL-S compensation topologies.
3. Comparative Analysis between the S-S and LCCL-S Compensation Topologies
3.1. Comparison between the S-S and LCCL-S Compensation Topologies in the Tuning Situation
According to the previous analysis and comparisons, it can be found that because the secondary loop has the same resonance compensation topology in S-S and LCCL-S, both topologies are similar in some respects, and these similarities are mainly reflected in two ways. The first one is that both topologies have the same resonant frequency () in the secondary loop. Although the resonance conditions of the primary loop are different, the resonant frequencies of the two topologies are not affected by parameters such as the load and coupling coefficient, and they are only determined by the compensation topology itself. Another similarity is that ZPA frequency bifurcation occurs under the condition of small load both in the S-S and LCCL-S compensation topologies.
However, because of the difference in the primary loop compensation topology, there are more differences between S-S and LCCL-S. First, when the system operates at ZPA frequency ωo, the secondary loop current of S-S does not change with load variations, presents constant-current source characteristics, and the output power increases dramatically as the load increases. However, in LCCL-S, the primary current remains constant even if , the output voltage is a constant at the ZPA frequency, presents constant voltage source characteristics, and the output power gradually decreases as the load increases. With respect to the output characteristic, S-S is more sensitive to load variations than LCCL-S. Secondly, because the ZPA frequency bifurcation occurs under the condition of small load both in S-S and LCCL-S, it is difficult for S-S to achieve low output power and for LCCL-S to achieve high output power without frequency control. Thirdly, the input impedance of S-S is inductive when f > fo; however, the input impedance of LCCL-S is inductive when f < fo. Although an inductive input impedance can guarantee the ZVS operation, operating in a deep inductive region may generate a large reactive current, which decreases the system efficiency. Thus, in order to ensure that the system operates safely and without significantly compromising the efficiency, the operating frequency of S-S should be slightly higher than fo, and the operating frequency of LCCL-S should be slightly less than fo. Finally, during the process of designing the compensation network, for the S-S topology, the output voltage cannot be adjusted by selecting the compensation parameters, and the compensation parameters are only determined by the designed ZPA frequency and the self-inductances of coils. However, in LCCL-S, the desired output voltage can be obtained by designing the compensation inductance Lin; in this way, the DC-DC converter that adjusts the battery charging voltage can be saved.
3.2. Comparison between the S-S and LCCL-S Compensation Topologies in the Detuning Situation
3.2.1. Basic Characteristic Analysis of the Detuning Secondary Loop Circuit Model in S-S and LCCL-S
From the previous comparative analysis, it is already possible to recognize the characteristics of S-S and LCCL-S in a tuning situation. However, during the actual charging process, the system often does not operate in the tuning state because of misalignment or deviations in the compensation parameter. Therefore, the comparisons between S-S and LCCL-S topologies in a detuning situation have a greater practical significance. When compared with the compensation parameters of the primary loop, the LCCL-S topology is more sensitive to the compensation parameter variations of the secondary loop [
25]. In addition, because S-S and LCCL-S have the same secondary loop structures, for fairness of comparison, only variations in the secondary loop compensation capacitance
Cs are considered in this paper.
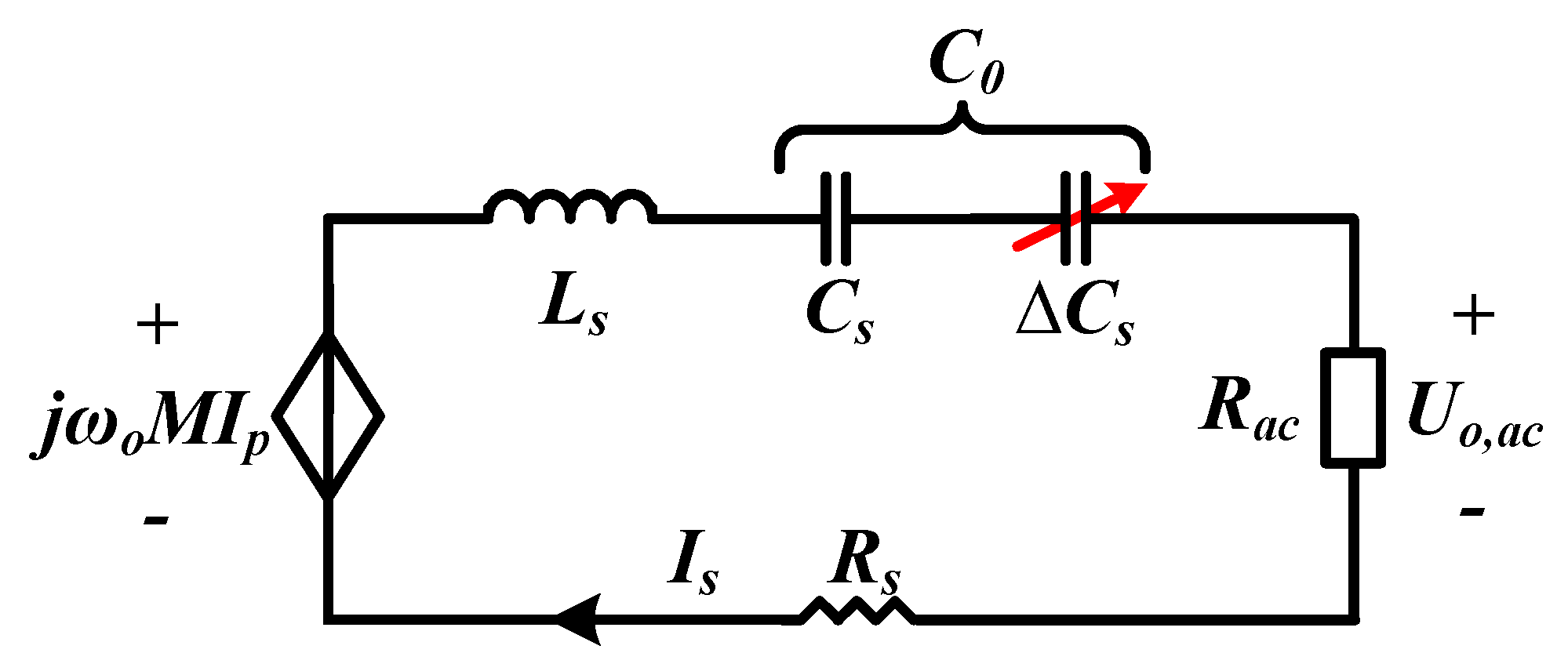
Figure 6 shows the equivalent circuit model of the secondary loop in S-S and LCCL-S compensation topologies in a detuning situation. In
Figure 6,
jωoMIp is the equivalent controlled voltage source from the primary loop to the secondary loop. Because the primary loop operates at the ZPA frequency
ωo, and the mutual inductance
M is nearly constant under the alignment condition, the amplitude of the controlled voltage source is only proportional to the primary current
Ip, and the phase is 90° ahead of
Ip.
Ls is the self-inductance of the secondary coil, and
Cs is the resonant compensation capacitance that matches
Ls. The relationship can be shown as follows:
Δ
Cs represents the deviation of
Cs, and
C0 is the equivalent resonant compensation capacitance of the secondary loop under the detuning situation.
C0,
Cs, and Δ
Cs satisfy the following relationship:
In order to concisely express the effect of the
Cs variation on the topology characteristics, a definition is introduced here:
Here,
δ indicates the degree to which
Cs deviates from its original value. If
C0 is larger than the standard value
Cs,
δ is positive. Conversely, if
C0 is less than the standard value
Cs,
δ is negative. In
Figure 6,
Rs and
Rac are the secondary coil resistance and equivalent AC load resistance, respectively, and
R0 = Rs +
Rac. From (20)–(22), the equivalent impedance of the secondary loop under the detuning situation can be defined as follows:
Meanwhile, if substituting (23) into (3), the reflection impedance from the primary loop to the secondary loop under the detuning situation can be derived as follows:
3.2.2. Voltage and Current Stresses on Components
In IPT systems, the voltage and current stress on system components is an important index [
15]. Excessive stress may cause power losses and affect safe operation. It is difficult to comprehensively compare the stresses of all devices in S-S and LCCL-S because of the different primary circuit structure. However, in this study, the coil parameters of S-S and LCCL-S topologies are identical, furthermore, among the system power losses, the loss caused by the voltage and current stress on the primary and secondary coils is dominant. Thus, a comparison and analysis of the voltage and current stress of coils in S-S and LCCL-S is a reasonable choice under the detuning situation.
Although the system operates under the detuning situation based on the analysis in
Section 2, the primary coil current of LCCL-S also remains the same (
Ip_LCCL =
Us/
jωoLin). The primary coil current of S-S can be obtained by substituting (24) into (4):
Similarly, by substituting (23) into (5) and (13), respectively, the secondary coil currents of S-S and LCCL-S can be derived as follows:
According to the analyses in
Section 2, using Kirchhoff’s law and in combination with the above current equations, the voltage of the primary and secondary coils in S-S and LCCL-S compensation topologies can be derived as follows:
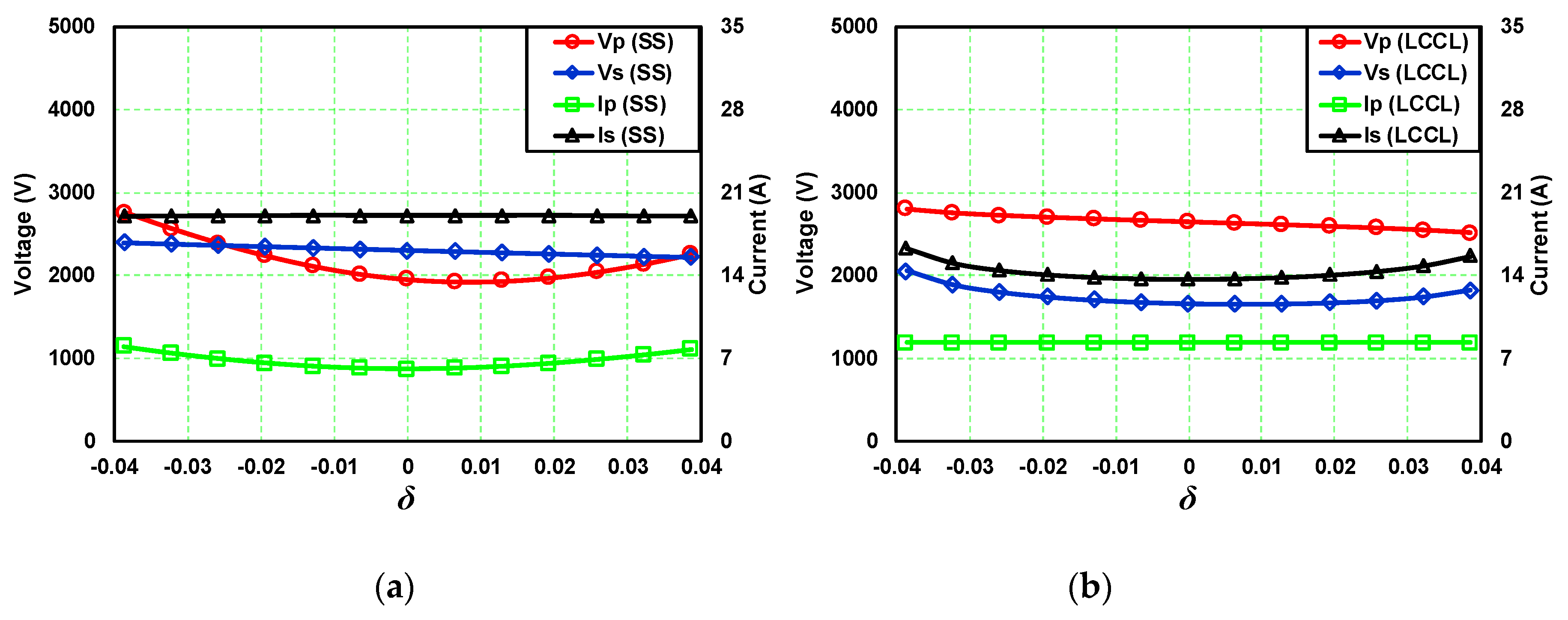
The parameters listed in
Table 1 are incorporated into the above voltage and current equations for the calculations. To keep the output power constant (2 kW) when
δ varies from −0.04 to 0.04, the calculation results are as shown in
Figure 7.
From
Figure 7, it can be clearly seen that when the output power is 2 kW under tuning conditions (
δ = 0), the values of
Vp and
Ip of the S-S topology are less than those for the LCCL-S topology. However, the values of
Vs and
Is of the S-S topology are higher than those for LCCL-S, hence, it is difficult to know which topology incurs a smaller loss in loosely coupled transformers (coils and magnetic pads), and the efficiency comparison of the resonance point requires more analysis and experimental verifications. When
δ varies from −0.04 to 0.04 and the output power is fixed at 2 kW, in the primary loop of the S-S topology,
Vp and
Ip both increase as
δ varies. In particular,
Vp rises rapidly when
δ decreases. However, in the secondary loop,
Vs and
Is are almost constants, and are independent of
δ, and present a constant-power output characteristic. In the LCCL-S topology, according to the previous analysis,
Ip remains the same, regardless of variations in
δ.
Vp shows a slight rise as
δ decreases, and decreases slightly as
δ increases; these variations are not obvious. However, in the secondary loop, both
Vs and
Is increase as
δ varies, and the growth is approximately symmetrical on both sides of
δ = 0. It can be concluded that the voltage and current stress on the primary loop of the LCCL-S topology is more insensitive to variations in
δ; however, in the secondary loop, the S-S topology is more stable than the LCCL-S topology under the detuning situation.
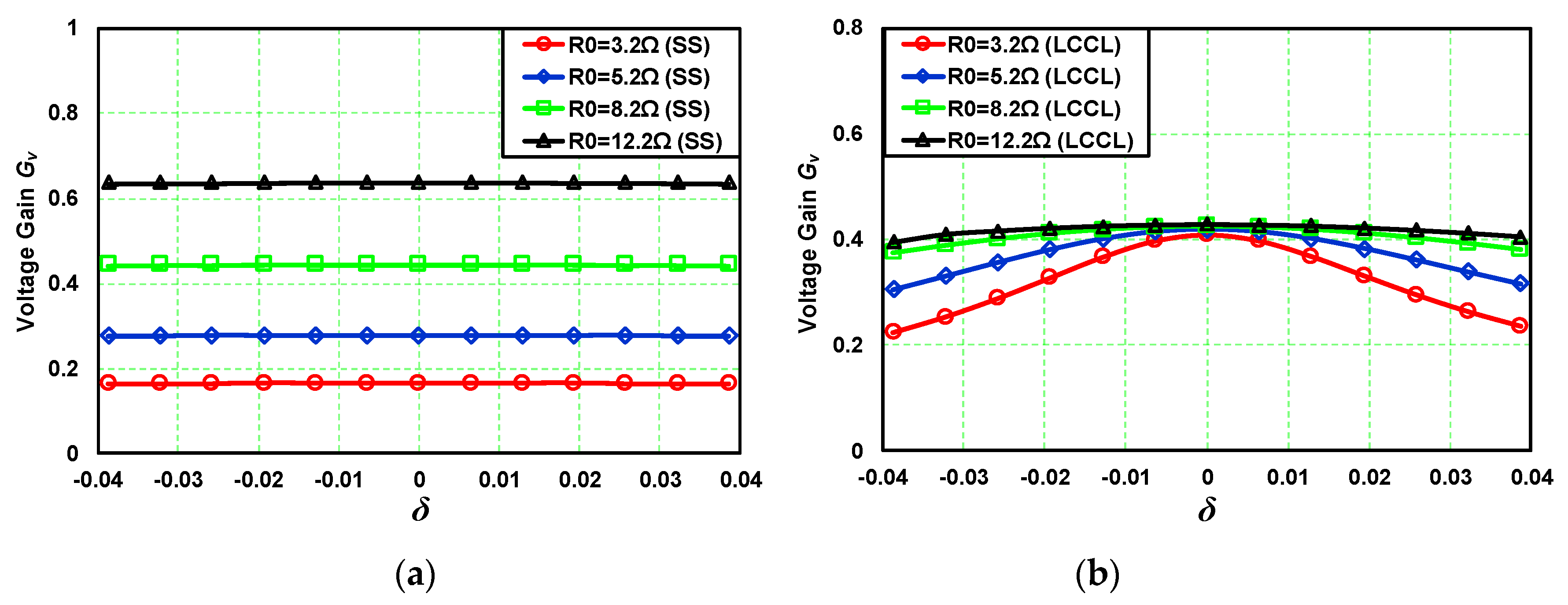
3.2.3. Voltage Gains
As analyzed in
Section 2, in IPT systems, a relatively stable output voltage can help to increase efficiency, save cost, and decrease control difficulty. Under tuning conditions, the voltage gains of S-S and LCCL-S are mainly affected by frequency when the system load remains the same. However, under the detuning condition caused by
Cs, the operation frequency is fixed at the ZPA frequency, and remains the same. In this section, the influences of the variation in
Cs on the voltage gain are analyzed and compared. The voltage gain of S-S topology under the detuning condition can be calculated by substituting (23) into (17):
The voltage gain of the LCCL-S topology under the detuning condition can be calculated by employing (27):
Using the parameters listed in
Table 1, the voltage gains of the S-S and LCCL-S topologies can be calculated by using (32) and (33) when
δ changes from -0.04 to 0.04; the calculation results are as shown in
Figure 8.
Figure 8 clearly shows that under the premise that the input voltage is fixed at 380 V, in the S-S compensation topology, under the tuning condition (
δ = 0),
Gv0_SS varies significantly with even small changes in load; this confirms the constant-current source output characteristics of S-S, which is analyzed in
Section 2. However, if the loads remain the same,
Gv0_SS is a constant that is independent of
δ changes. With respect to the voltage gain in the LCCL-S topology, under tuning conditions,
Gv0_LCCL is a constant regardless of the load variations. This also confirms the constant-voltage source output characteristics of LCCL-S, which is previously analyzed. However, under the constant-load condition, on both sides of the
δ = 0 point,
Gv0_LCCL decreases gradually with an increasing deviation of
δ. Furthermore, when the load is relatively large,
Gv0_LCCL is almost unchanged. As shown in
Figure 8b, when
R0 = 12.2 Ω,
Gv0_LCCL decreased only by 4% in comparison with the tuning point (
δ = 0), thus, the LCCL-S topology exhibits an almost constant-voltage source output characteristic under large load conditions. Summarizing the above analysis, under the detuning condition caused by
Cs variations, if the load remains the same, the output voltage of the S-S topology is always insensitive to
Cs variations in the entire load range. However, with respect to the LCCL-S topology, the output voltage is insensitive to
Cs variations, only in the case of large loads.
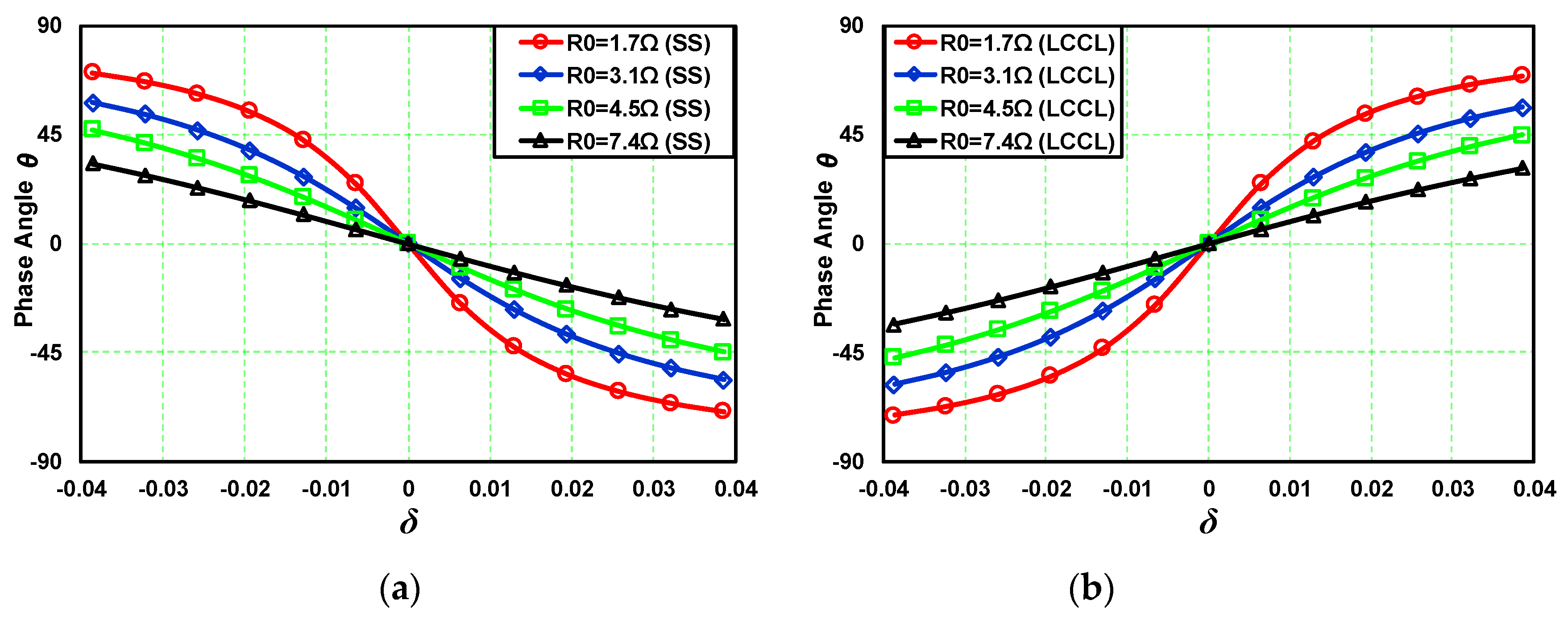
3.2.4. Input Impedances
Similar to the voltage and current stress, the input impedance is closely related to the efficiency and safe operation. As discussed in
Section 2, operating under a capacitive input impedance may result in a large switching loss, and may even damage the switch components. Although operating under an inductive input impedance can avoid these problems, an excessive inductive impedance may increase the reactive current and decrease the efficiency. Generally, near the ZPA frequency point, operating under a light inductive impedance can help to obtain the desired efficiency. Under the detuning condition, even if the frequencies, loads, and other parameters remain the same, the variations in
Cs may cause the input impedance to be changed.
In the S-S compensation topology, when the primary loop operates at the ZPA frequency and the secondary loop operates in the detuning state caused by
Cs variations, according to the previously derived equations, and together with (24), the input impedance of the S-S compensation topology under the detuning condition can be derived as:
By substituting (24) into (11), the input impedance of the LCCL-S compensation topology under the detuning condition can also be derived as:
When
δ changes from −0.04 to 0.04, with the parameters listed in
Table 1, after substituting (34) and (35) into (19), the phase angle of the input impedances in the S-S and LCCL-S compensation topologies with different loads are as shown in
Figure 9.
From
Figure 9, it can be clearly seen that, in the S-S compensation topology, when
δ is negative (Δ
Cs < 0), the input impedance from the resistive impedance in
δ = 0 to an inductive impedance, when
δ is positive (Δ
Cs > 0), the input impedance from the resistive impedance in
δ = 0 to a capacitive impedance. The farther
δ deviates from the standard value, the larger is the phase angle. However, this trend is reversed in the LCCL-S compensation topology. The input impedance becomes a capacitive impedance when
δ is negative, and becomes an inductive impedance when
δ is positive. Similarly, the phase angle increases with the degree of deviation of
δ.
According to the previous analysis, during the process of wireless power transfer, a light inductive input impedance can implement ZVS operation; in this way, the switching loss can be reduced and the device safety can be protected. Thus, under the premise of ensuring fairness and for a reasonable comparison, in order to make the following assumptions in subsequent analyses and experiments, in the S-S topology, Cs only varies within the margin for which δ < 0. In the LCCL-S topology, Cs only varies within the margin for which δ > 0. |δ| is used to uniformly indicate the deviation of Cs both in the S-S and LCCL-S compensation topologies.
3.2.5. Output Powers
As analyzed in
Section 2, under the tuning condition, when the resonance topology parameters of S-S and LCCL-S remain the same, the output power is related only to the loads. The output power of the S-S topology increases as the load increases, but in the LCCL-S topology, the output power increases as the load decreases. According to (26) and (27), under the detuning condition discussed in this paper, the AC output power equations of S-S and LCCL-S can be easily derived as follows:
According to the earlier analysis in this section, it can be seen that in the case of constant loads, the output voltage of the S-S topology remains the same, so the output power of the S-S topology is also a constant. However, in the LCCL-S topology, the output voltage decreases as the deviation of Cs increases when the load is small; only under the premise of a large load, the output voltage almost does not vary with variations in Cs. Thus, it can be concluded that for the S-S topology, within the entire power range, the output power does not change with variations in Cs. However, for the LCCL-S topology, the output power decreases with variations in Cs at high-power applications, and is almost unaffected by variations in Cs only in low-power applications.
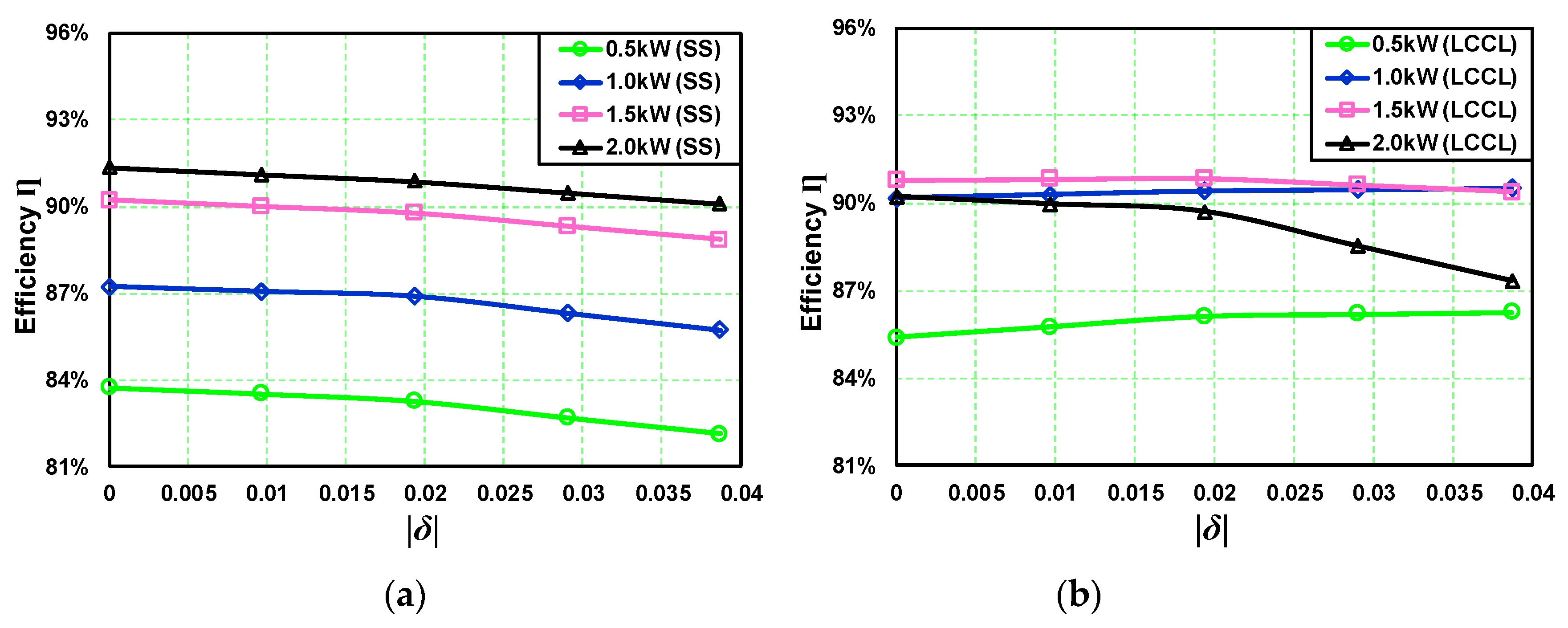
5. Conclusions
In this study, the electrical characteristics of S-S and LCCL-S compensation topologies are analyzed and compared in both tuning and detuning states. In particular, under the detuning conditions caused by Cs variations, the voltage and current stresses on components, input impedances, voltage gains, and output powers are analyzed and compared using δ. A 2.4-kW experimental prototype is configured to obtain an efficiency comparison between S-S and LCCL-S topologies. According to the comparative results, it can be concluded that in the tuning state, S-S presents a constant-current source characteristic to the load, and the maximum efficiency is achieved under the high-output-power condition. However, LCCL-S presents a constant-voltage source characteristic to the load, and the maximum efficiency is achieved under the low-output-power condition. The output characteristic of S-S is more sensitive to load variations than LCCL-S. In the detuning state, under the premise that the remaining parameters are the same and that only Cs, changes, the output characteristic of S-S is almost not affected by the variations of Cs within the entire load range. Although the efficiency of S-S decreases with the deviation of Cs, the downtrend is not obvious in high-power situations. However, in the LCCL-S topology, the output characteristic of LCCL-S is not affected by the variations of Cs only in low-output-power (light load) situations. The efficiency of LCCL-S decreases rapidly in high-power situations. S-S is less sensitive to Cs variations than LCCL-S in high-power applications. In conclusion, S-S is more suitable in high-power EV applications and LCCL-S is more suitable in low-power EV applications. The presented analysis method in this study also can be adopted to other applications such as mobile phones and unmanned aerial vehicles (UAVs).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}