Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines


Abstract
1. Introduction
- (1)
- high power density that inherits from its rotary structure;
- (2)
- all the excitation sources like armature windings and PM are housed on the mover, easily achieving a simple thermal management;
- (3)
- A cost-effective stator of simple and robust.
2. The Stator Step-Skewed Structures
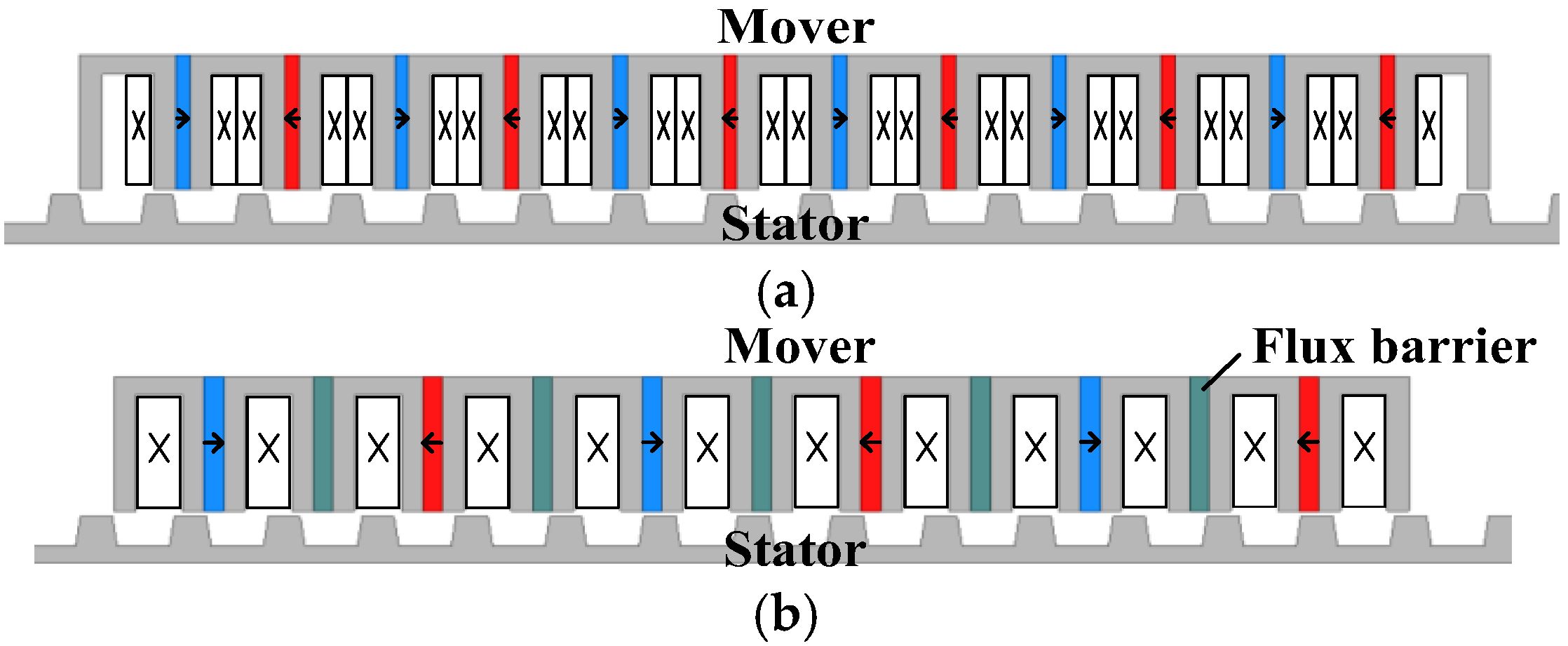
2.1. Original Topology
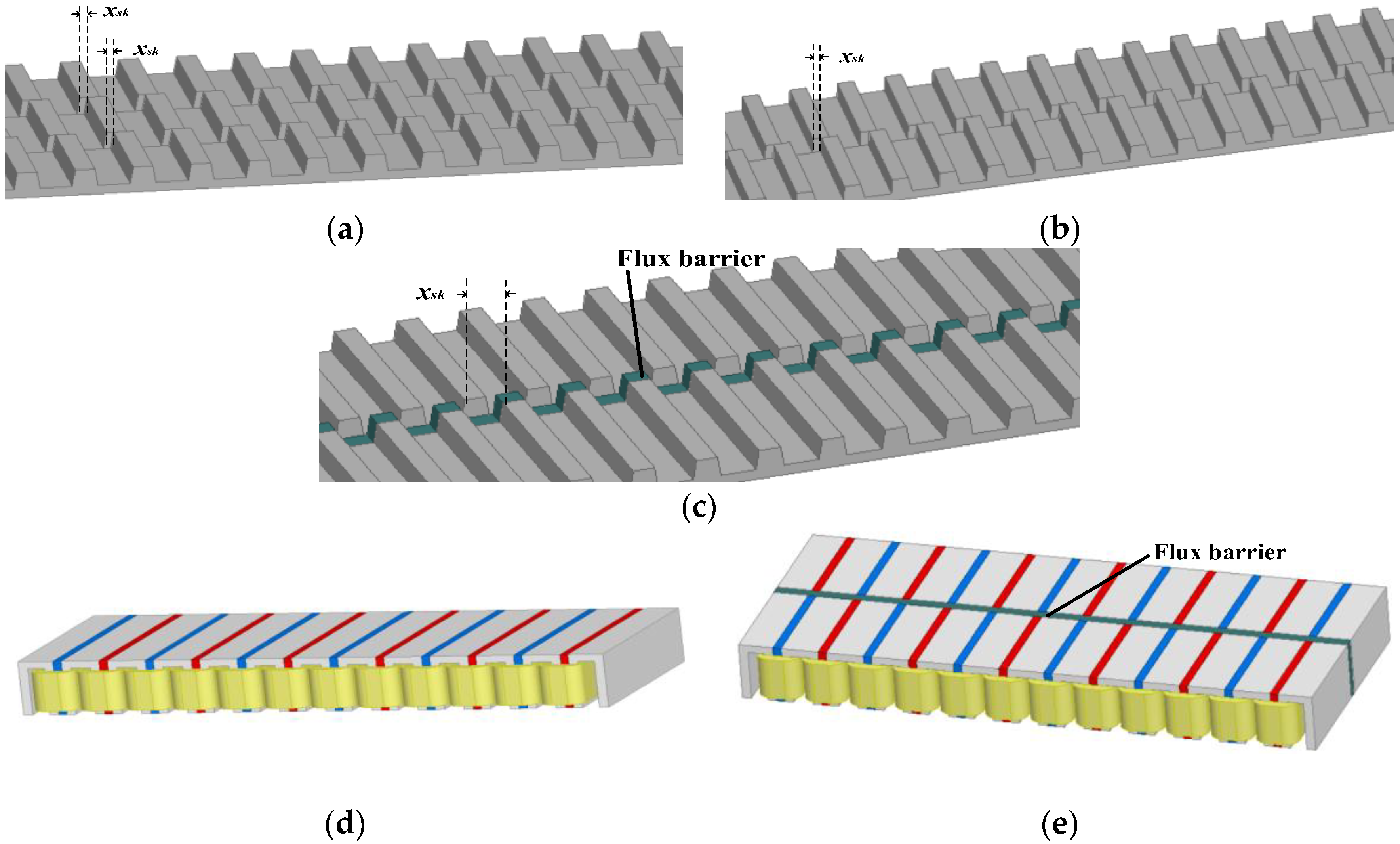
2.2. The Stator Step-Skewed Structures
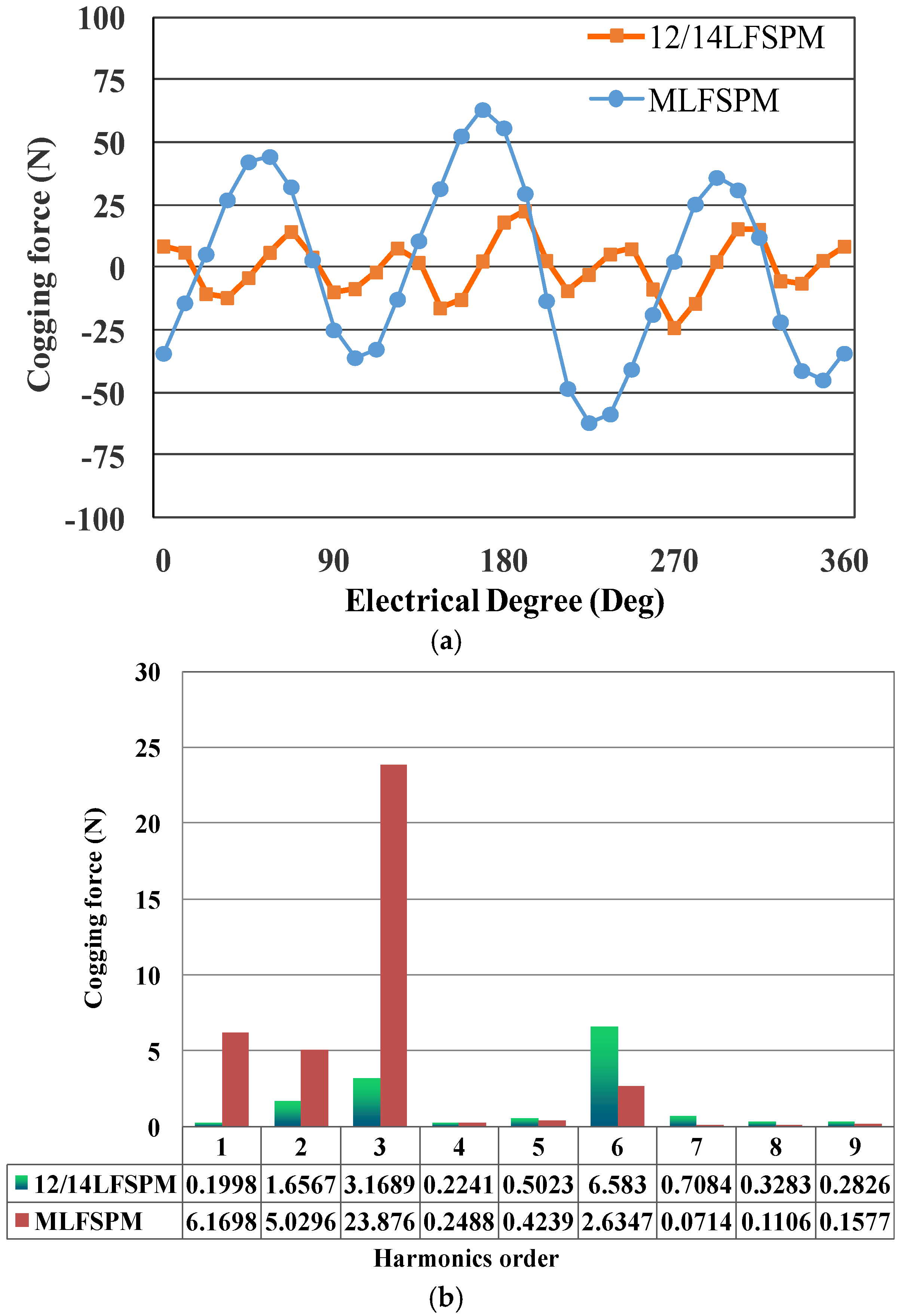
3. Comparison of Cogging Force Reduction
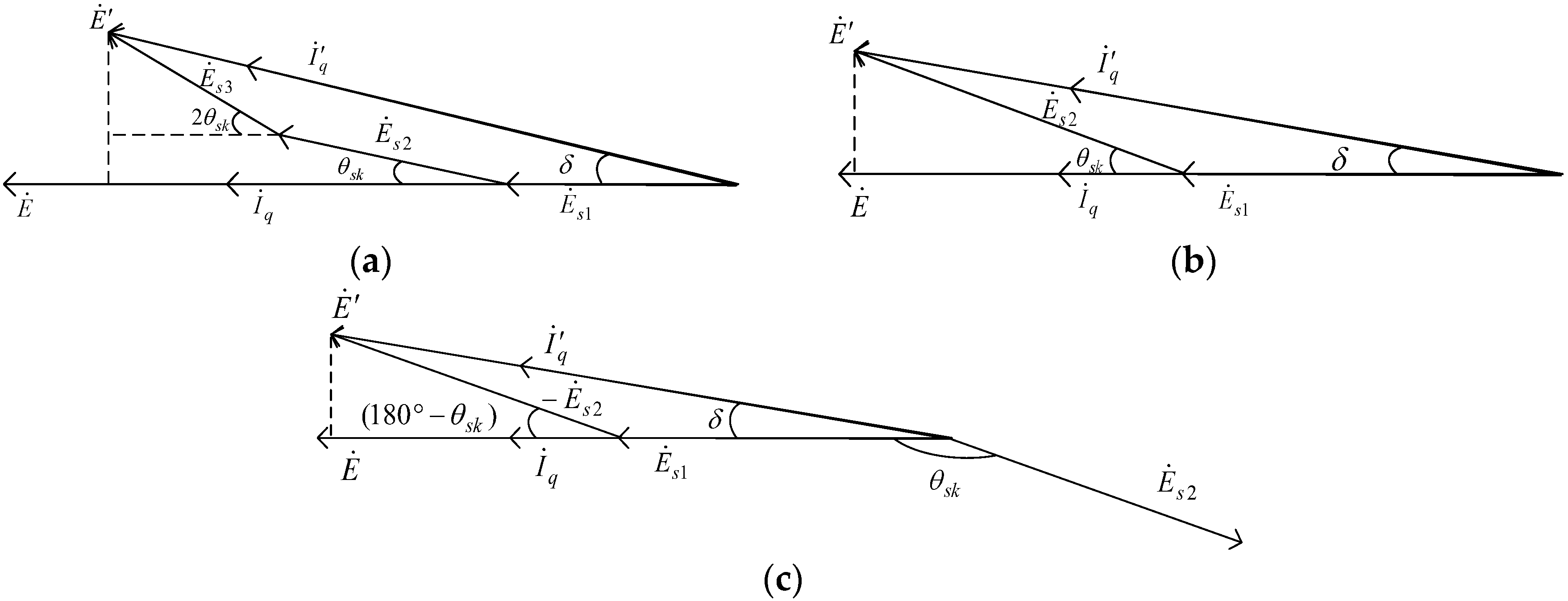
4. The Analysis of the Magnetic Independence
5. Conclusions
- (1)
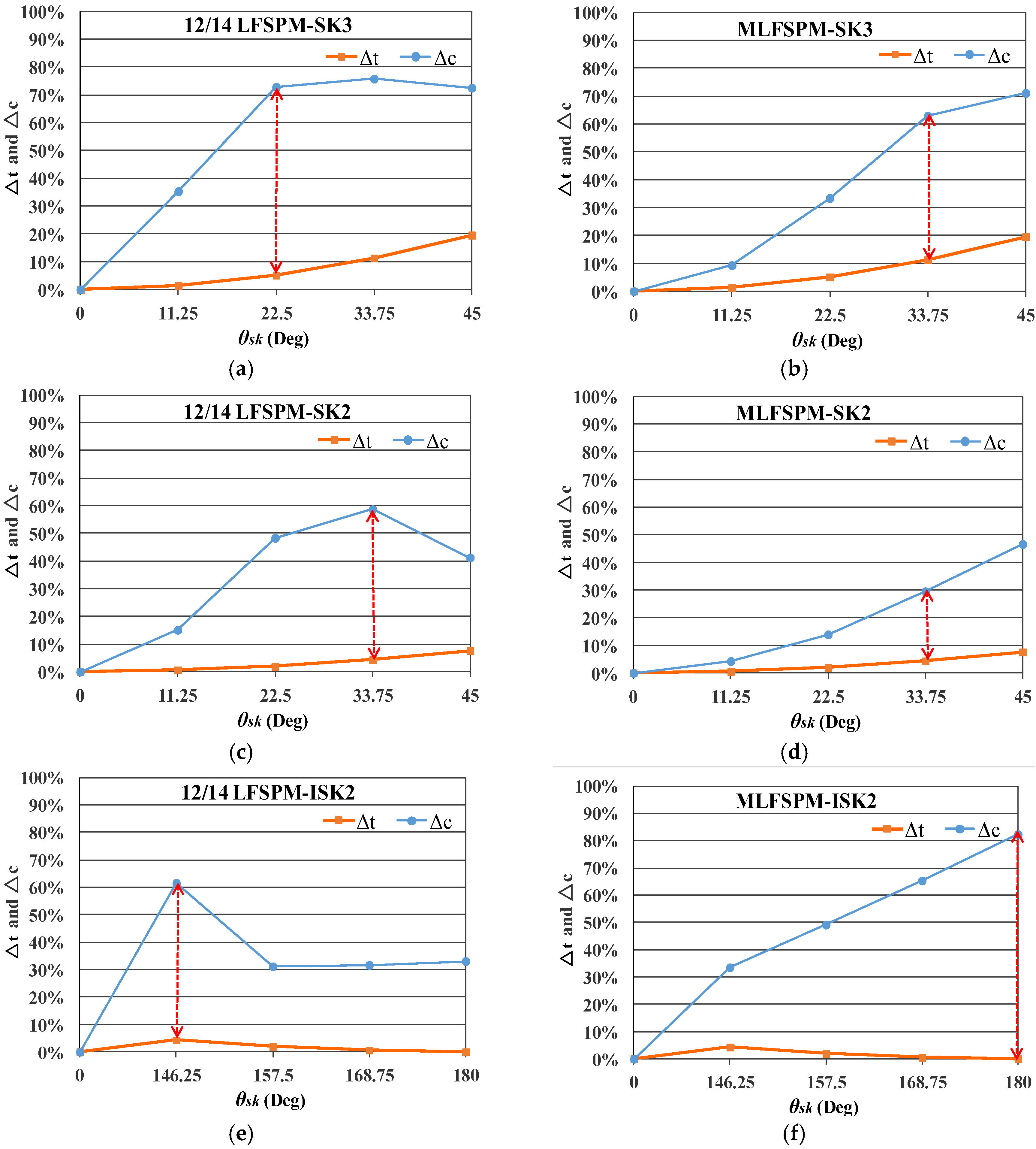
- The step skewed stator is an effective structure to reduce the cogging force, however, the selection of the step skewed structure and corresponding skewed displacement impacts greatly on both the cogging force and average thrust force.
- (2)
- For the stator step skewed structures, the skewed displacement can be selected according to maximum difference between the reduction ratio of the cogging force and the decrease ratio of the average thrust force.
- (3)
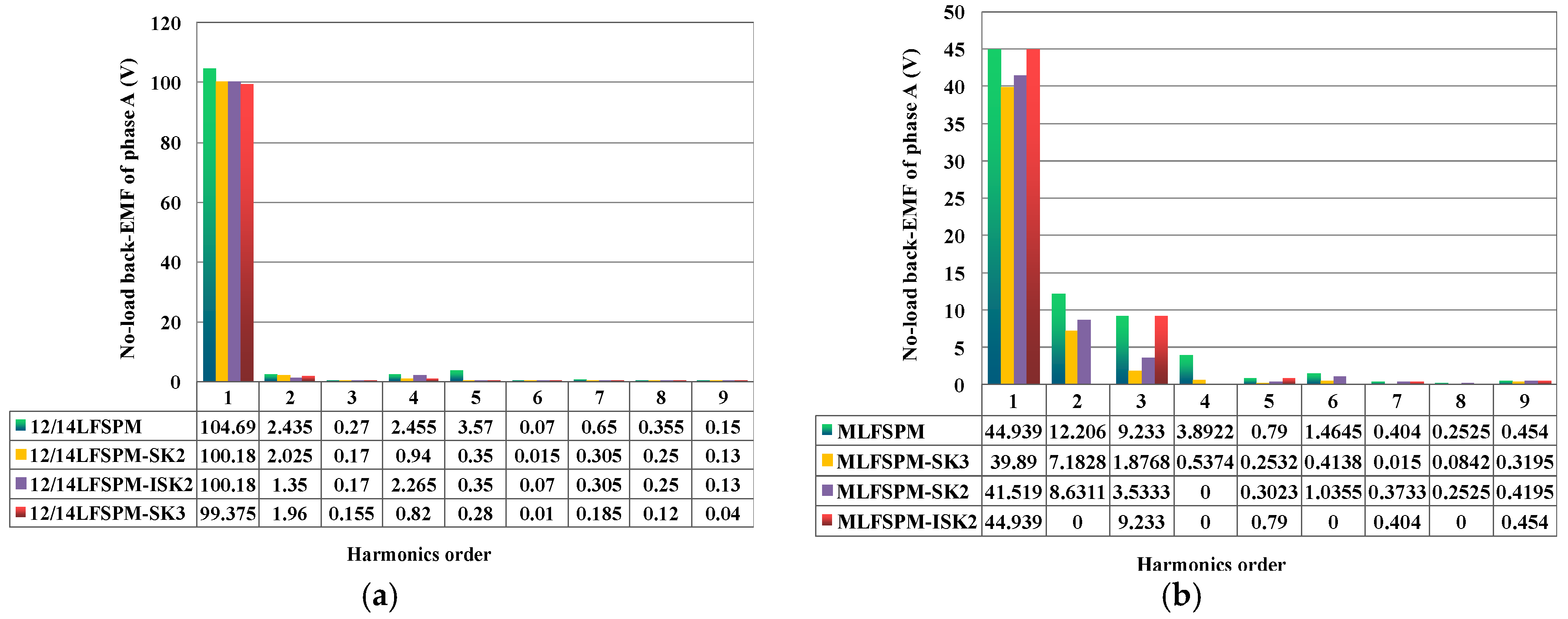
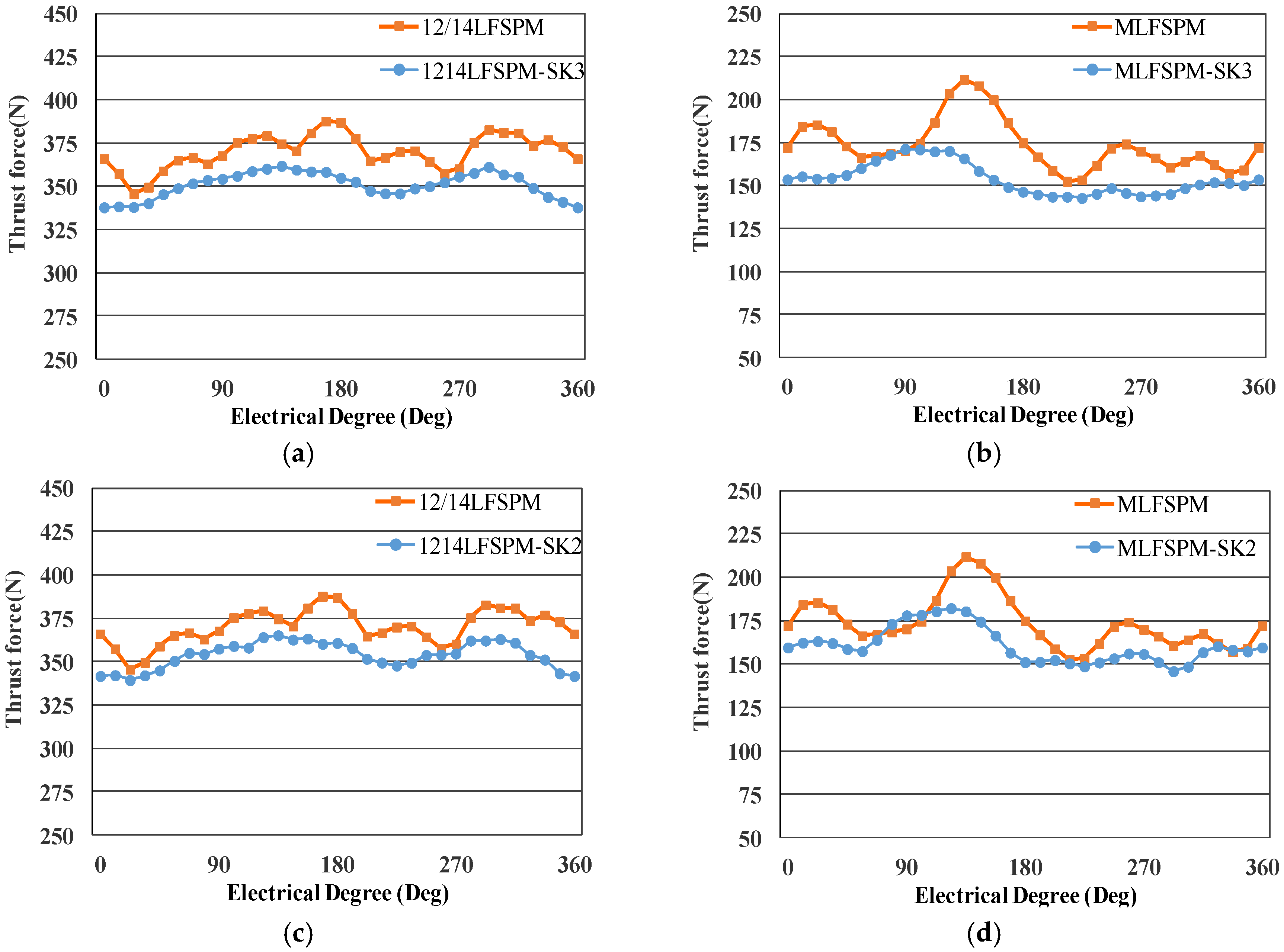
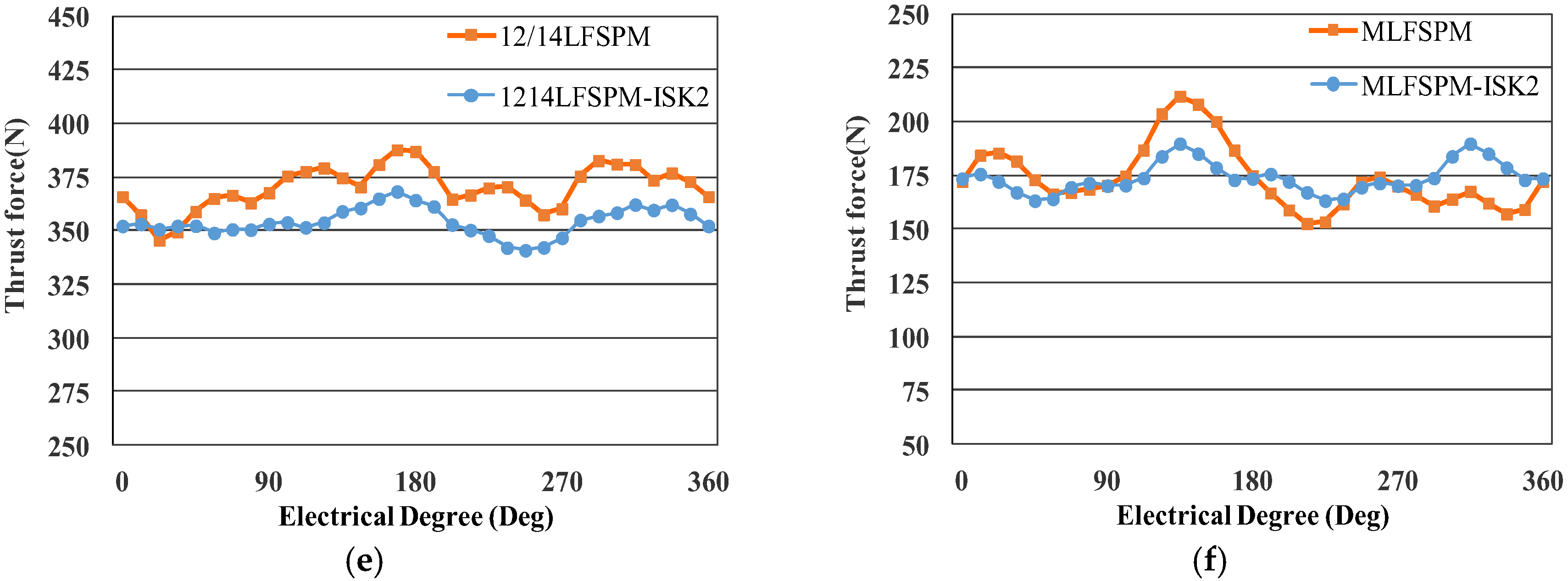
- The harmonics in the no-load back-EMF can also be suppressed by the step skewed structures, and based on the reduction of the cogging force and suppression of the harmonics in the no-load back-EMF, the thrust force ripple is significantly reduced by the stator step skewed structures with a small drop of the thrust force density.
- (4)
- All the stator step skewed structures are general, practical, and can be applied for the cogging force reduction of conventional LFSPM machines and LFSPM machines with special design like modular structure, C-core, E-core structures and so on.
- (5)
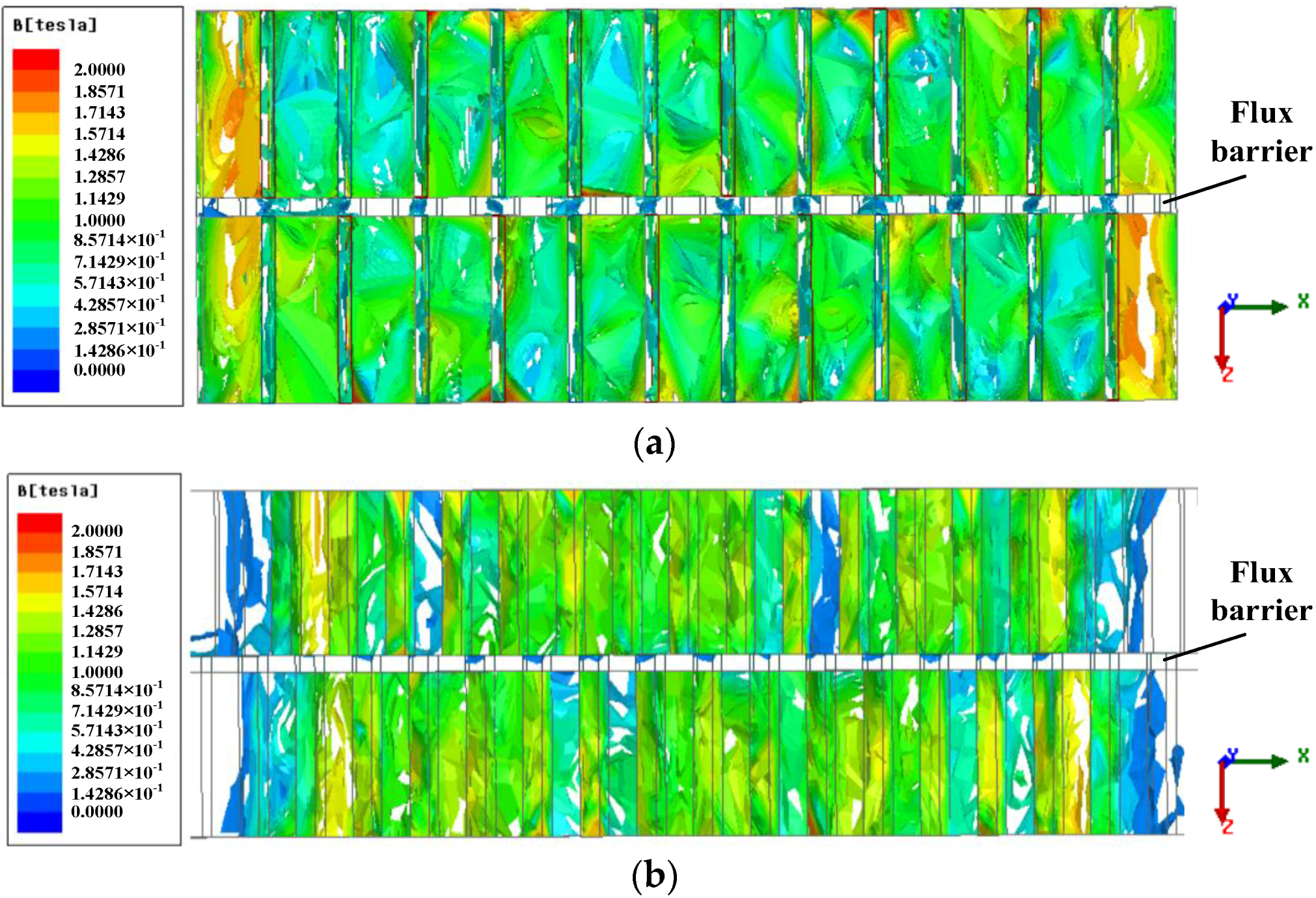
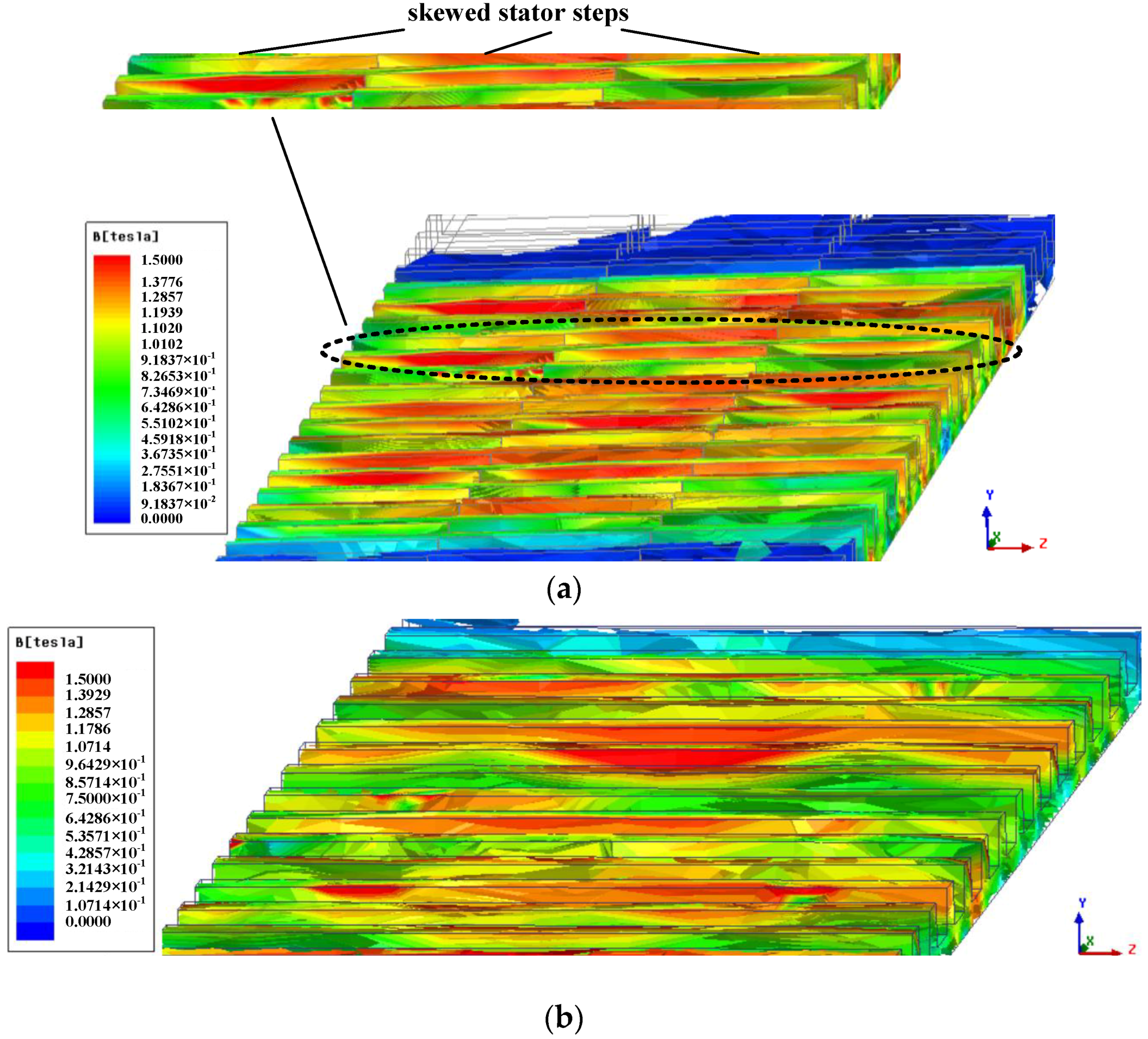
- Compared with the stator of the original structure that made from a single segment, the skewed stator is made from segments that arranged axially with a skewed displacement, decreasing the robustness of the stator. In addition, because of the flux barrier, the robustness of the 12/14 LFSPM machines with ISK2 stator is lower than that of the 12/14 LFSPM machines with SK3 and SK2 stators.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Musolino, A.; Rizzo, R.; Tripodi, E. The double-sided tubular linear induction motor and its possible use in the electromagnetic aircraft launch system. IEEE Trans. Plasma Sci. 2013, 41, 1193–1200. [Google Scholar] [CrossRef]
- Kim, Y.K.; Gu, B.G.; Jung, I.S.; Won, S.H.; Hur, J. Analysis and Design of Slotted Tubular Linear Actuator for the Eco-pedal System of a Vehicle. IEEE Trans. Magn. 2012, 48, 939–942. [Google Scholar] [CrossRef]
- Wai, R.J.; Lee, J.D.; Chuang, K.L. Real-time PID control strategy for Maglev transportation system via particle swarm optimization. IEEE Trans. Ind. Electron. 2011, 58, 629–646. [Google Scholar] [CrossRef]
- Amoros, J.G.; Andrada, P. Sensitivity Analysis of Geometrical Parameters on a Double-Sided Linear Switched Reluctance Motor. IEEE Trans. Ind. Electron. 2010, 57, 311–319. [Google Scholar]
- Lin, F.J.; Shen, P.H.; Yang, S.L.; Chou, P.H. Recurrent radial basis function network-based fuzzy neural network control for permanent magnet linear synchronous motor servo drive. IEEE Trans. Magn. 2006, 42, 3694–3705. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Chen, X.; Chen, J.T.; Howe, D.; Dai, J.S. Novel linear flux-switching permanent magnet machines. In Proceedings of the 2008 IEEE International Conference on Electrical Machines and Systems (ICEMS), Wuhan, China, 17–20 October 2008; pp. 2948–2953. [Google Scholar]
- Min, W.; Chen, J.T.; Zhu, Z.Q.; Zhu, Y.; Duan, G.H. Optimization of linear flux switching permanent magnet motor. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference (VPPC), Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Krop, D.; Encica, L.; Lomonova, E. Analysis of a novel double sided flux switching linear motor topology. In Proceedings of the XIX International Conference on Electrical Machines (ICEM), Rome, Italy, 6–8 September 2010; pp. 1–5. [Google Scholar]
- Cao, R.W.; Cheng, M.; Chris, M.; Hua, W.; Wang, X.; Zhao, W.X. Comparison of Complementary and Modular Linear Flux-Switching Motors with Different Mover and Stator Pole Pitch. IEEE Trans. Magn. 2013, 49, 1493–1504. [Google Scholar] [CrossRef]
- Wang, C.F.; Shen, J.X.; Wang, Y. A new method for reduction of detent force in permanent magnet flux-switching linear motors. IEEE Trans. Magn. 2009, 45, 2843–2846. [Google Scholar] [CrossRef]
- Min, W.; Chen, J.T.; Zhu, Z.Q.; Zhu, Y.; Zhang, M.; Duan, G.H. Optimization and comparison of novel e-core and c-core linear switched flux PM machines. IEEE Trans. Magn. 2011, 47, 2134–2141. [Google Scholar] [CrossRef]
- Du, Y.; Yang, G.; Quan, L.; Zhu, X.Y.; Xiao, F.; Wu, H.Y. Detent force reduction of a C-core linear flux-switching permanent magnet machine with multiple additional teeth. Energies 2017, 10, 318. [Google Scholar] [CrossRef]
- Zhou, S.G.; Yu, H.T.; Hu, M.Q.; Jiang, C.X.; Hao, L. Reduction of Cogging Force in a Linear Flux-Switching Permanent-Magnet Brushless AC Machine for Direct-Drive Applications. IEEE Trans. Magn. 2011, 47, 3252–3255. [Google Scholar] [CrossRef]
- Zhong, W.; Yu, H.; Hu, M.; Shi, Z.; Liu, Q. Study on a Novel Pseudo-Six-Phase Linear Flux-Switching Permanent-Magnet Machine for Direct Drive. IEEE Trans. Appl. Supercond. 2016, 26, 1–4. [Google Scholar] [CrossRef]
- Jin, M.J.; Wang, Y.; Shen, J.X.; Luk, P.C.K.; Fei, W.Z.; Wang, C.F. Cogging torque suppression in a permanent magnet flux-switching integrated-starter-generator. IET Electr. Power Appl. 2010, 4, 647–656. [Google Scholar] [CrossRef]
- Wang, Y.; Jin, M.J.; Fei, W.; Shen, J.X. Cogging torque reduction in PM flux-switching machines by rotor teeth axial pairing. IET Electr. Power Appl. 2010, 4, 500–506. [Google Scholar] [CrossRef]
- Liu, X.D.; Gu, Z.X.; Zhao, J. Torque Ripple Reduction of a Novel Modular Arc-Linear Flux-Switching Permanent-Magnet Motor with Rotor Step Skewing. Energies 2016, 9, 404. [Google Scholar] [CrossRef]
- Fei, W.; Luk, P.C.K.; Shen, J. Torque analysis of permanentmagnet flux switching machines with rotor step skewing. IEEE Trans. Magn. 2012, 48, 2664–2673. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Zhou, Y.J. Torque Density and Magnet Usage Efficiency Enhancement of Sandwiched Switched Flux Permanent Magnet Machines Using V-Shaped Magnets. IEEE Trans. Magn. 2013, 49, 3834–3837. [Google Scholar] [CrossRef]
- Hao, W.J.; Wang, Y. Thrust Force Enhancement and Ripple Reduction of A Sandwiched Linear Flux Switching Permanent Magnet Machine with Segment Stator for Urban Rail Transit. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 924–931. [Google Scholar] [CrossRef]
- Hao, W.J.; Wang, Y. Thrust Force Ripple reduction of two C-core Linear Flux-Switching Permanent Magnet Machines of High Thrust Force Capability. Energies 2017, 10, 1608. [Google Scholar] [CrossRef]
- Cao, R.W.; Cheng, M.; Hua, W. Investigation and General Design Principle of a New Series of Complementary and Modular Linear FSPM Motors. IEEE Trans. Ind. Electron. 2013, 60, 5436–5446. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item and Symbol | 12/14 LFSPM | Modular LFSPM (MLFSPM) |
|---|---|---|
| Air gap length, g (mm) | 1 | 1 |
| Total height, ht (mm) | 38 | 38 |
| Machine depth, D (mm) | 80 | 80 |
| Mover slot pith, tms (mm) | 20 | 20 |
| PM/Flux barrier thickness, wpm (mm) | 3.5 | 3.5 |
| Mover tooth width, wmt (mm) | 4 | 4 |
| Stator pole width, wst (mm) | 5.8 | 5.8 |
| Stator pole pith, ts (mm) | 17.14 | 17.14 |
| Magnet remanence, Br (T) | 1.2 | 1.2 |
| Number of phases | 3 | 3 |
| Armature windings per phase | 200 turns | 200 turns |
| Rated current amplitude, INm (A) | 10 | 10 |
| Rated power, PN (KW) | 1.48 | 0.7 |
| Rated force, FN (N) | 370 | 175 |
| Velocity | 4 m/s | 4 m/s |
| Structure | Name |
|---|---|
| 12/14 LFSPM with three-step skewed stator | 12/14 LFSPM-SK3 |
| 12/14 LFSPM with two-step skewed stator | 12/14 LFSPM-SK2 |
| 12/14 LFSPM with improved two-step skewed stator | 12/14 LFSPM-ISK2 |
| MLFSPM with three-step skewed stator | MLFSPM-SK3 |
| MLFSPM with two-step skewed stator | MLFSPM-SK2 |
| MLFSPM with improved two-step skewed stator | MLFSPM-ISK2 |
| Structure | θsk | xsk | Δt | Δc | THDemf | σ 2D FEA | σ 3D FEA |
|---|---|---|---|---|---|---|---|
| 12/14 LFSPM | 0° | 0 | 0% | 100% | 4.8% | 11.4% | 14.1% |
| 12/14 LFSPM-SK3 | 22.5° | 5% | 73% | 2.2% | 6.8% | 8.9% | |
| 12/14 LFSPM-SK2 | 33.75° | 4% | 59% | 2.3% | 6.6% | 8.3% | |
| 12/14 LFSPM-ISK2 | 146.25° | 4% | 62% | 2.7% | 7.7% | 10% | |
| MLFSPM | 0° | 0 | 0% | 100% | 35% | 34% | 35.7% |
| MLFSPM-SK3 | 33.75° | 11% | 63% | 18% | 18% | 18.2% | |
| MLFSPM-SK2 | 45° | 8% | 47% | 22% | 22% | 23.1% | |
| MLFSPM-ISK2 | 180° | 0% | 82% | 18% | 14% | 16.7% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, W.; Wang, Y. Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines. Energies 2018, 11, 2172. https://doi.org/10.3390/en11082172
Hao W, Wang Y. Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines. Energies. 2018; 11(8):2172. https://doi.org/10.3390/en11082172
Chicago/Turabian StyleHao, Wenjuan, and Yu Wang. 2018. "Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines" Energies 11, no. 8: 2172. https://doi.org/10.3390/en11082172
APA StyleHao, W., & Wang, Y. (2018). Comparison of the Stator Step Skewed Structures for Cogging Force Reduction of Linear Flux Switching Permanent Magnet Machines. Energies, 11(8), 2172. https://doi.org/10.3390/en11082172