1. Introduction
In countries like Brazil, Russia, and China, renewable energy sources may locate far away from the major load centers [
1,
2,
3]. The half-wavelength transmission is an attractive technique for those situations. This kind of transmission has been studied since the 1940s, however, there is no half-wavelength transmission system operating in the world [
4,
5]. The feasibility of half-wavelength transmission systems still needs further study.
Existing researches have investigated the basic characteristics of half-wavelength transmission systems. Previous literature declared that the advantages of half-wavelength transmission systems include:
The half-wavelength transmission line is free from the usual long-line operating problems, such as Ferranti effect, excessive charging current, and generator self-excitation [
6].
There is no need of compensating equipment and switching stations for the half-wavelength transmission line [
7,
8].
The half-wavelength transmission lines are considered to be equivalent to short lines. Synchronization stability is not a limiting factor for power transmission [
6].
The half-wavelength transmission is competitive in terms of economy. Results in previous papers [
9,
10,
11] have shown the economic advantages in comparison with the high-voltage direct current transmission (HVDC).
However, the above declared advantages of half-wavelength transmission systems have not been fully supported in theory. There are some technical problems in the half-wavelength transmission system. Among them, overvoltage and synchronization stability are the most important technical issues that should be considered for the feasibility analysis. Previous researches find that the steady-state voltage is dependent on the transmission power and the power factor [
12]. To avoid steady-state overvoltage, the transmission power should not exceed the surge impedance loading (SIL, which is the power under the matched condition) [
13]. In terms of small signal synchronization stability, a transmission system whose equivalent electric length is slightly longer than the electrical half wavelength is thought to be suitable [
6,
12,
14]. However, the feasible range of the equivalent electric length has not been figured out clearly. Actually, the feasible range is related to the system resonant transmission distance, which is proposed and clarified in this paper.
Under three-phase short circuit faults and asymmetrical faults, the occurrence of power-frequency overvoltage is inevitable and serious, and the transient synchronization stability of the half-wavelength transmission system varies with the fault type and location [
12,
15,
16]. For three-phase faults, the maximum overvoltage has been given a theoretical explanation in a previous paper [
12], but the transient synchronization stability is usually studied by simulations in previous literature, theoretical analysis of the transient synchronization stability is still lacking.
This paper tries to find out the feasible transmission distance of the half-wavelength transmission system in terms of overvoltage and stability. In this process, indicators such as the resonant transmission distance and the synchronization coefficient are proposed to reflect the steady-state characteristics and small signal synchronization stability, and the most serious fault point is defined and derived to study the transient characteristics under three-phase faults.
The main contributions and findings of this paper are:
A general circuit model of half-wavelength power transmission system is established, which can be used to analyze the steady-state and transient overvoltage of half-wavelength power transmission system and the problem of small signal synchronization stability and transient synchronization stability.
The resonance phenomenon of the half-wavelength power transmission system is found, and the concept of resonant transmission distance is proposed. The resonant transmission distance is less than the half-wavelength transmission distance.
When the transmission distance is equal to the resonance transmission distance, there is a specific point on the transmission line whose overvoltage level reaches infinity.
The small signal equation of the half-wavelength transmission system is established, the concept of the synchronization coefficient is put forward, and the range of the transmission distance that can keep the small signal synchronization stability is determined.
The most serious fault location was found, and the formula for calculating the most serious fault location was derived.
It is found that the transient power frequency overvoltage of the transmission system exceeds 10 times the rated voltage when there is a short-circuit fault on the most serious fault location.
If the generator adopts “a constant potential behind a reactance” model and neglects the damping effect when the most serious fault occurs, the half-wavelength power transmission system loses its transient stability definitely, regardless of the transmission power.
Different from all the previous studies, this paper clearly points out that the half-wavelength transmission system is technically impossible and has no feasibility of engineering, because on the one hand, the transient power frequency overvoltage level is unacceptable, and on the other hand, the transient synchronization stability cannot be guaranteed.
This paper is organized as follows. The circuit model of the half-wavelength transmission system is given in
Section 2. The resonant transmission distance is defined in
Section 3. The steady-state overvoltage and the small signal synchronization stability of the system are analyzed in
Section 4 and
Section 5 to determine the feasible transmission distance. After considering the frequency variation, the feasible range of the transmission distance is presented in
Section 6. For feasible transmission distances, the transient power frequency overvoltage and the transient synchronization stability characteristics under three-phase short circuit faults are analyzed in
Section 7 and
Section 8, respectively. At last, conclusions are drawn.
2. Circuit Model
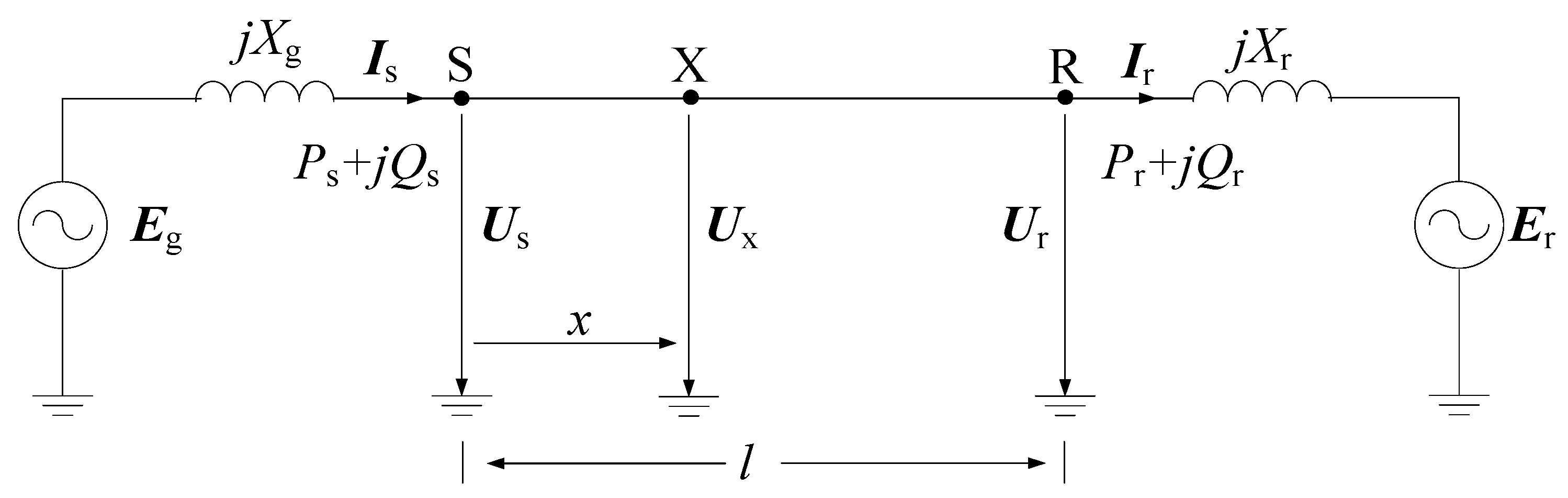
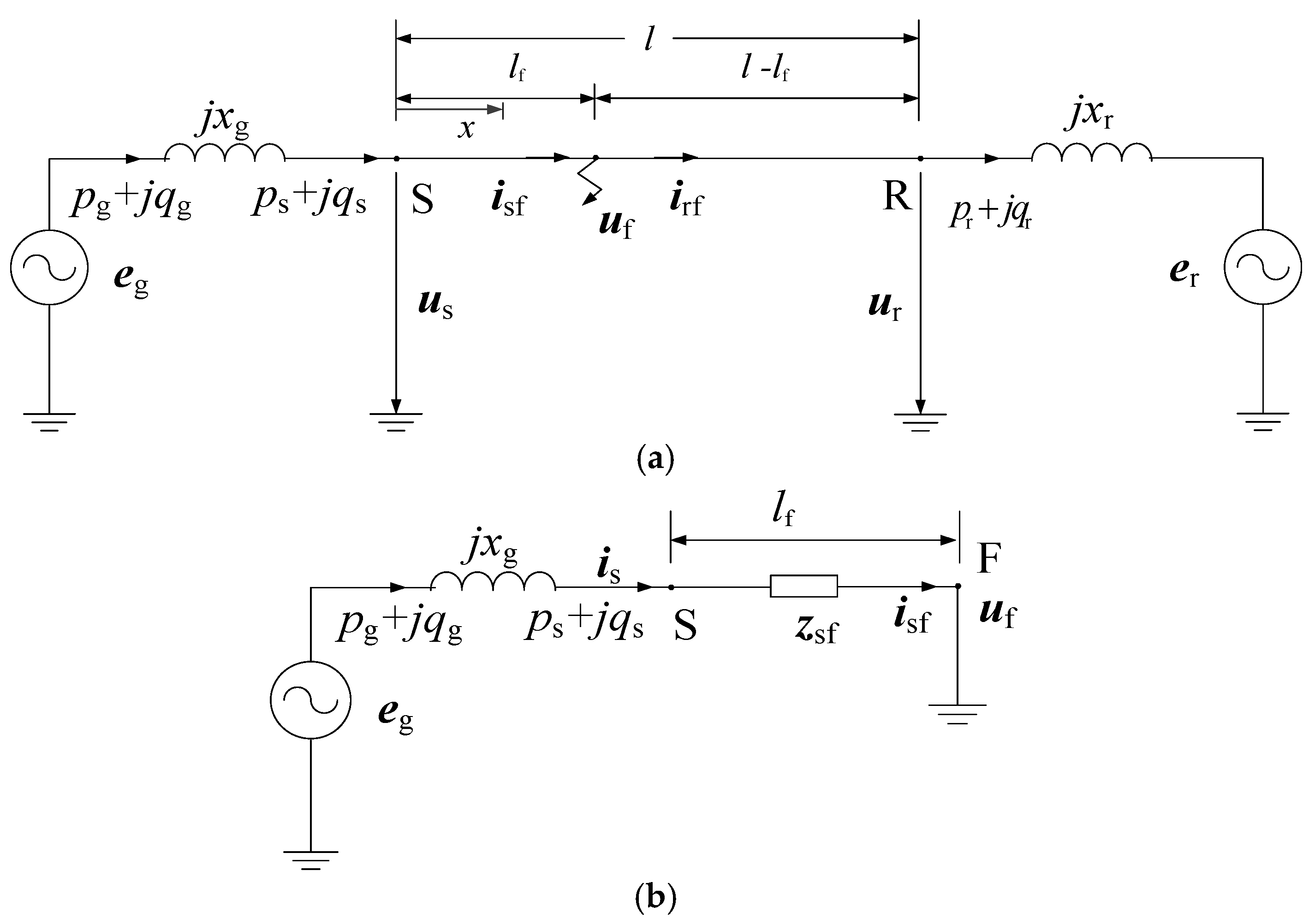
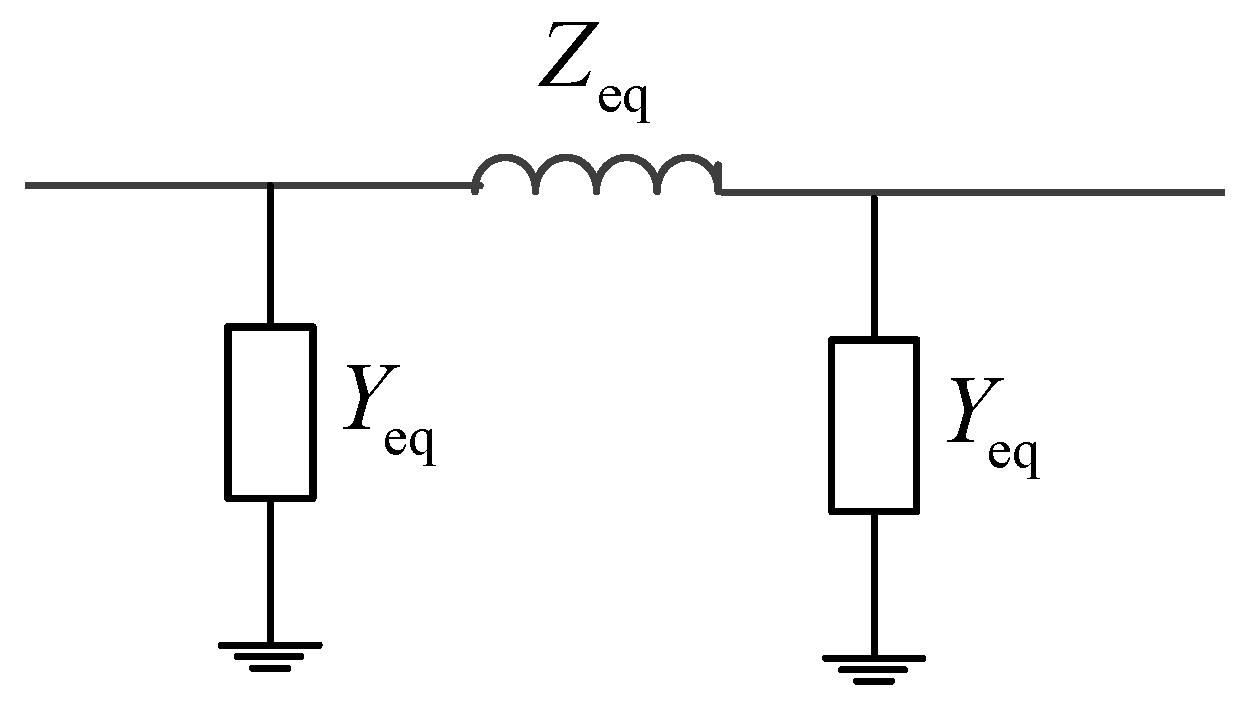
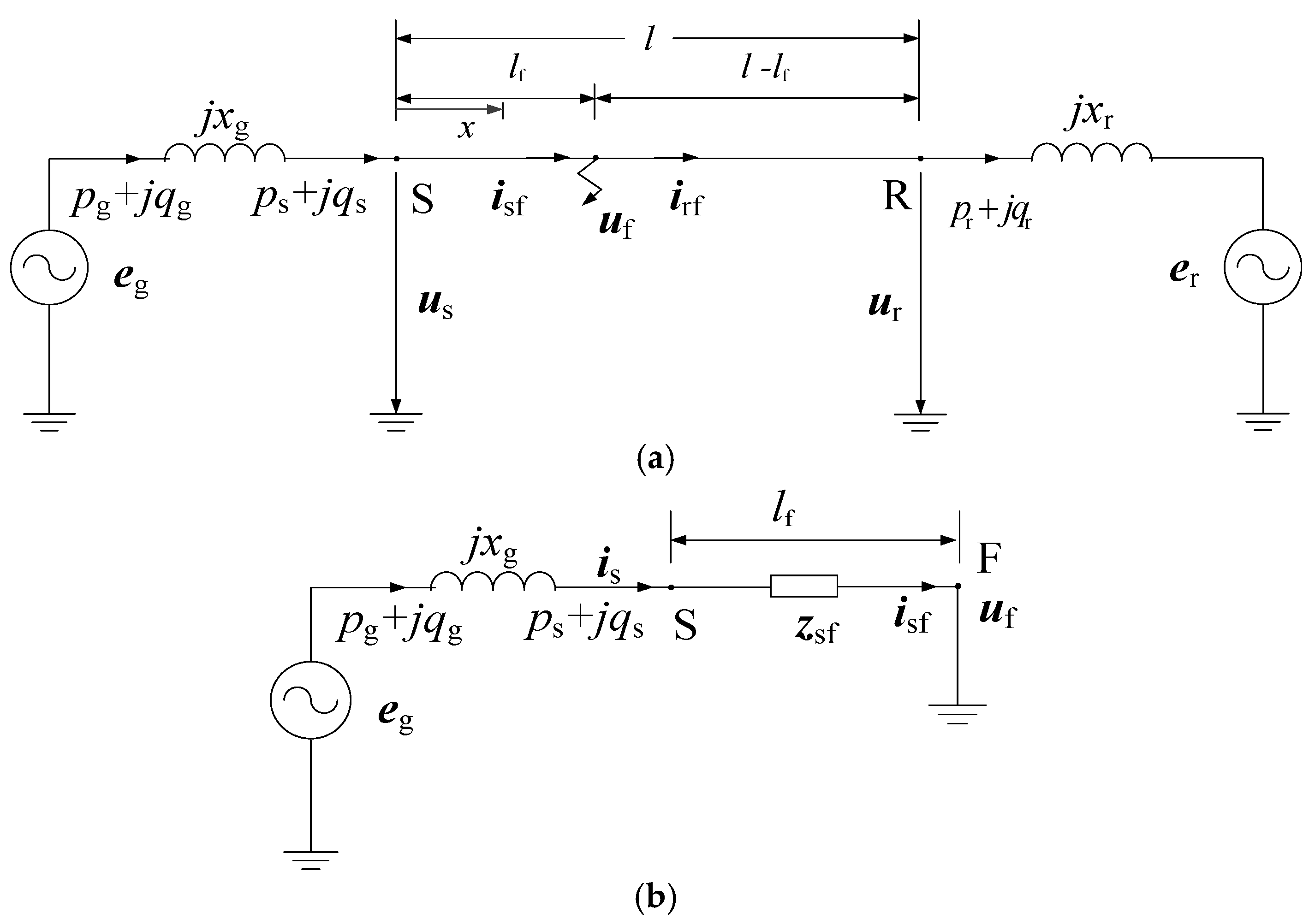
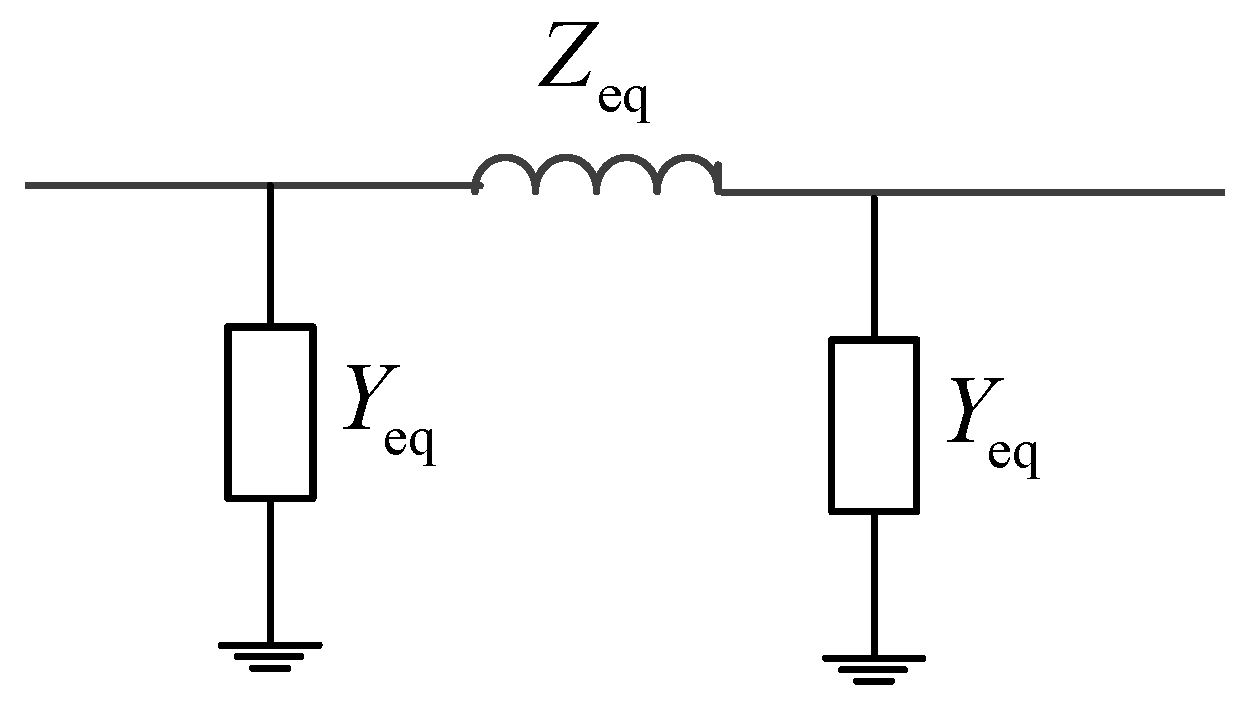
Half-wavelength transmission lines are usually applied in point-to-grid transmission systems or grid-to-grid transmission systems. For both cases, the steady-state characteristics and the synchronization stability of the system can be analyzed by the single-machine-infinite-bus system. When considering the sending-end system and the receiving-end system, a general long-distance transmission system can be represented by
Figure 1. The transmission line adopts the positive sequence distributed parameter model; the sending-end generator-transformer unit adopts the classical generator model; the receiving-end system is represented by the Thevenin equivalent circuit.
As shown in
Figure 1,
Eg and
Xg are the equivalent electromotive force and the equivalent impedance of the sending-end generator-transformer unit;
Er and
Xr are the equivalent source voltage and the equivalent impedance of the receiving-end system.
Us and
Ur are the voltages at both ends of the transmission line.
Is and
Ir are the currents of the sending end and receiving end.
Ux is the voltage at the point
x km away from the sending end.
l is the length of the transmission line (or called the transmission distance).
Ps and
Qs are the active and reactive power of the sending end;
Pr and
Qr are the active and reactive power of the receiving end.
When taking the line resistance into consideration, the basic characteristic of the transmission line is described by the long line equations:
where
ZC is the line’s surge impedance;
γ is the line’s propagation coefficient.
ZC and
γ can be calculated by:
where
R1,
L1,
G1, and
C1 are the positive sequence resistance, inductance, conductance, and capacitance of per unit length, respectively;
ω is the angular frequency;
α is the attenuation constant and
β is the phase constant.
To facilitate the description of system characteristics and to carry out numerical calculations, a test system is analyzed in this paper. The rated frequency of the system is supposed to be 50 Hz. The unit length line parameters are given by [
17,
18], and the surge impedance and the propagation coefficient are calculated by (3) and (4). Detailed parameters are shown in
Table 1.
As shown in
Table 1, the attenuation constant (
α) is much smaller than the phase constant (
β); the phase angle of the surge impedance is negligible. These system parameters are very close to those of lossless lines.
The half wavelength of the test system is:
The rated voltage of the line (
Urated) is supposed to be 1000 kV, and then the surge impedance loading is:
In this paper, the rated voltage and the surge impedance loading of the transmission line are set as the reference voltage (UB) and the reference capacity (SB) for the per-unit system, respectively. The actual values of physical quantities are represented by upper-case letters, and the corresponding per-unit values are represented by lower-case letters in this paper.
In order to analyze the typical application of half wavelength transmission system in transmitting bulk power from energy bases to the load centers, assume the parameters of the two end systems are as shown in
Table 2.
First we neglect the losses of the transmission line, according to the long line equations and
Figure 1, we have:
where the admittance matrix [
y] is:
According to (7), the following per-unit power equations can be derived:
where
δg is the phase angle difference between
eg and
er.
Similarly, if the line losses are considered, the power equations become:
where:
When the transmission line parameters and
xg,
xr,
eg,
er are given,
C1–
C6 and
–
are constants. The detail expressions are given in the
Appendix A.1.
3. Resonant Transmission Distance
Using (9), we have:
where:
When
, Δ
0 = 0. Then according to (8), the denominators of elements in the admittance matrix [
y] are zero. Series resonance occurs between the transmission line and the equivalent reactance of both sides of the system. If we define the transmission distance at this condition as the resonant transmission distance and denote it as
lresnt, then we have:
As shown in (21), lresnt is dependent on the parameters of the transmission line and the equivalent reactance of both ends, but not related to eg and er.
When the losses of the transmission line are considered, the resonant transmission distance can also be calculated by (21) according to (18). For the test system, lresnt is about 2707 km, βlresnt is about 165.8°.
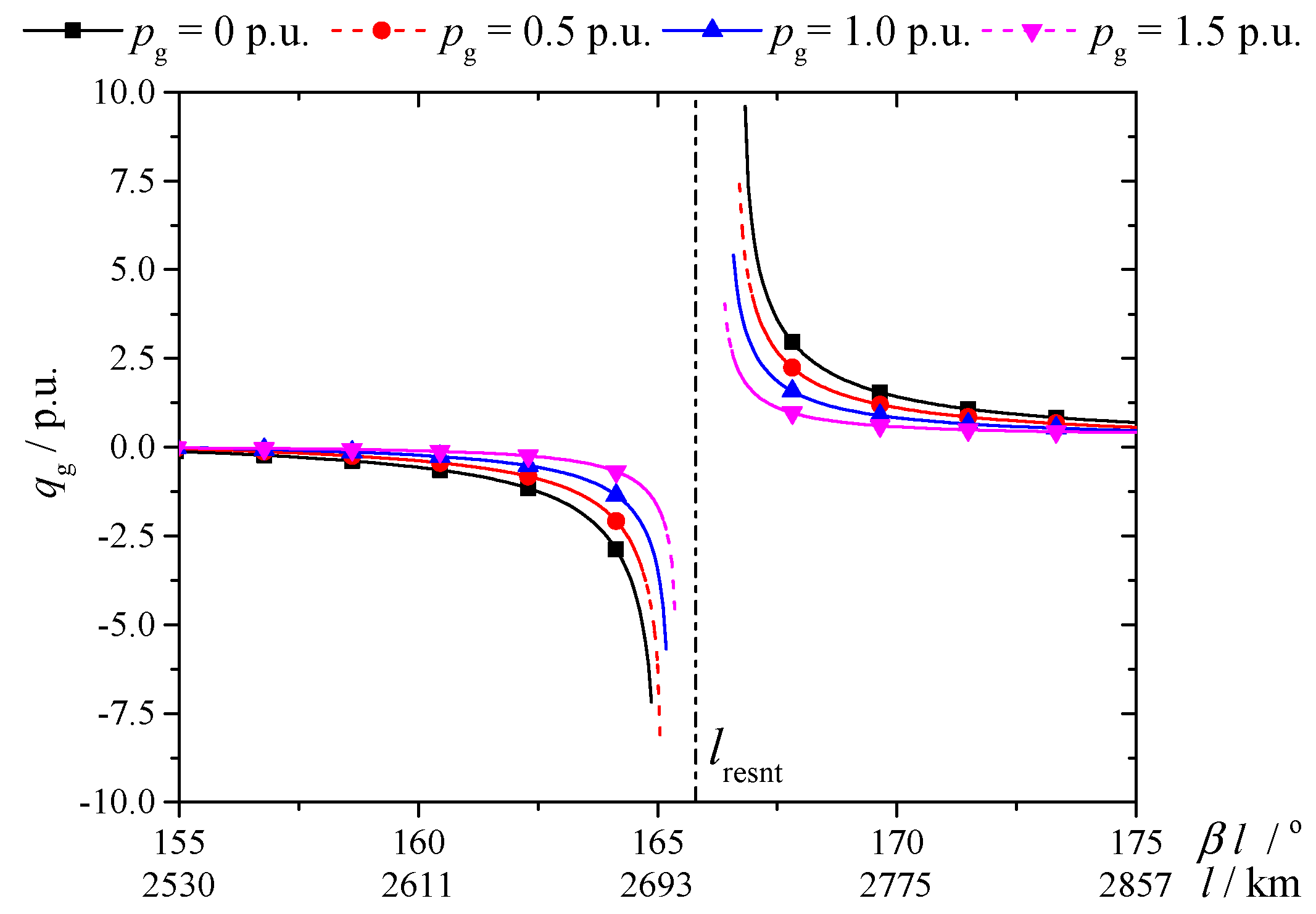
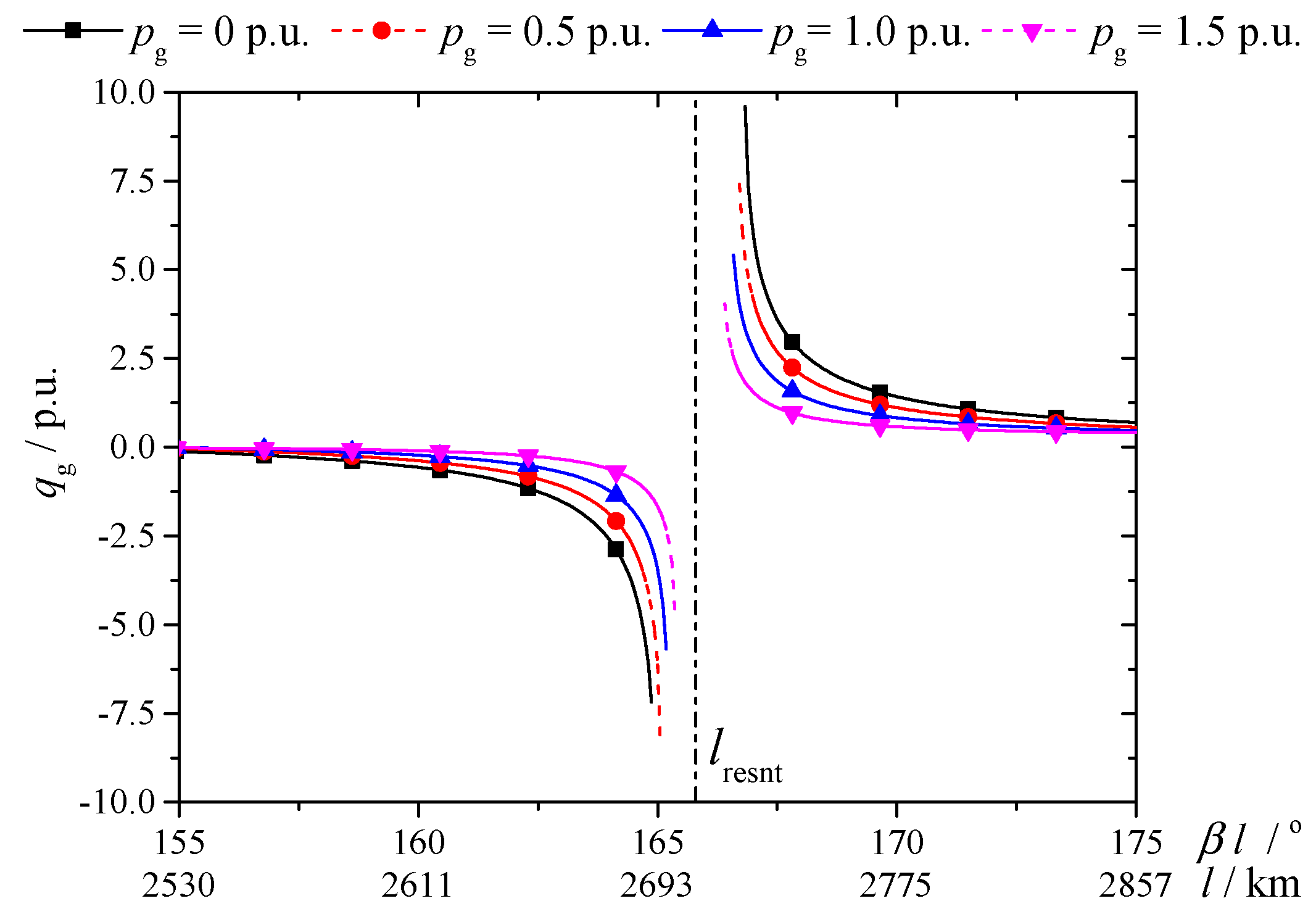
To analyze the test system’s characteristic, we set a general terminal condition, which is
eg = 1.1 p.u. and
er = 1.0 p.u. Then
qg is calculated under different transmission power and transmission distances, and the results are shown in
Figure 2.
As shown in
Figure 2, when the transmission distance is close to
lresnt (in 2700–2715 km), there is no solution for (13), so the test system cannot operate; when the transmission distance is not in the above range, the test system can operate, but the absolute value of
qg is too large. For example, when
βl = 167°, if
pg = 0 p.u., 0.5 p.u., 1.0 p.u. and 1.5 p.u., then
qg is 5.81 p.u., 4.06 p.u., 2.69 p.u., and 1.53 p.u., respectively. It can be seen that the less the
pg is, the greater the absolute value of the
qg is. With the increase of the deviation between
l and
lresnt,
qg decreases; when
l reduces to below 2639 km or
l increases to over 2804 km, the absolute value of
qg decreases to below 1.0 p.u.
Thereby, the transmission distance should stay away from lresnt to make the system operational and to decrease the reactive power.
4. Steady-State Overvoltage Analysis
In order to further determine the feasible transmission distance, the steady-state overvoltage is analyzed. According to the long line equations, the voltage at the point
x km away from the sending end is:
where:
where * indicates the conjugate complex.
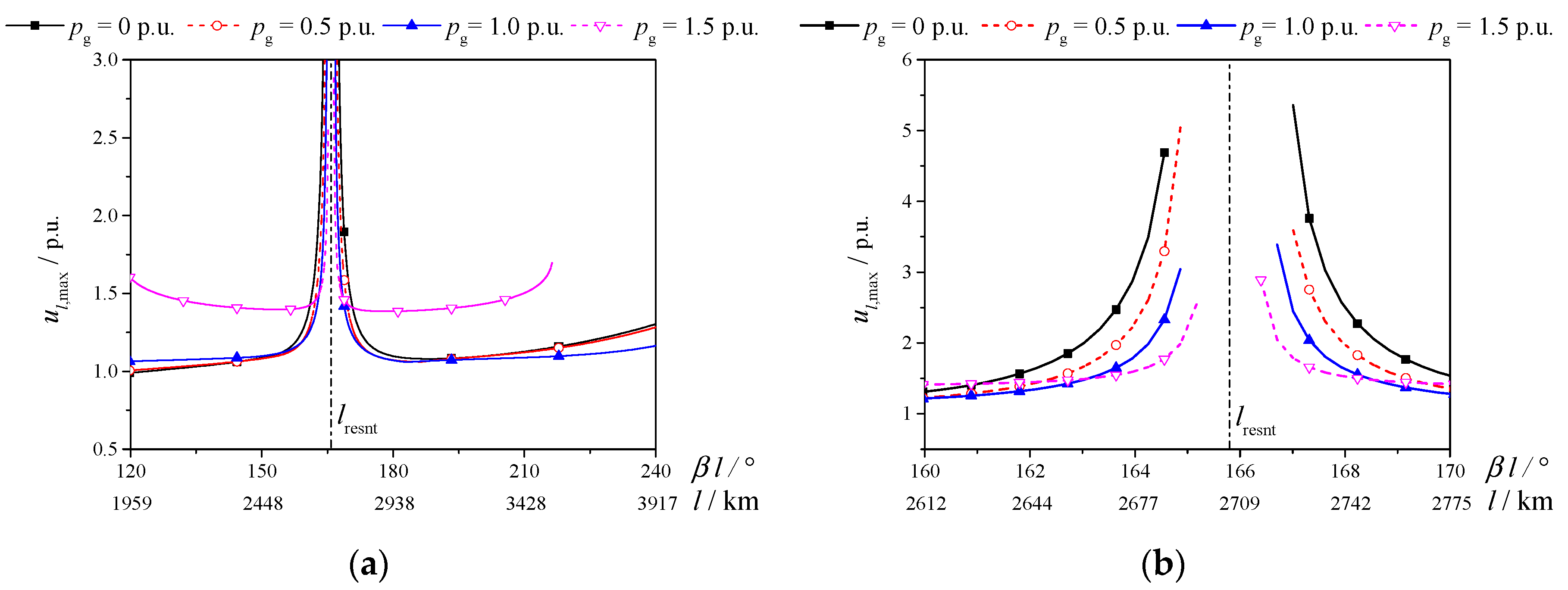
Under the terminal condition
eg = 1.1 p.u. and
er = 1.0 p.u., taking
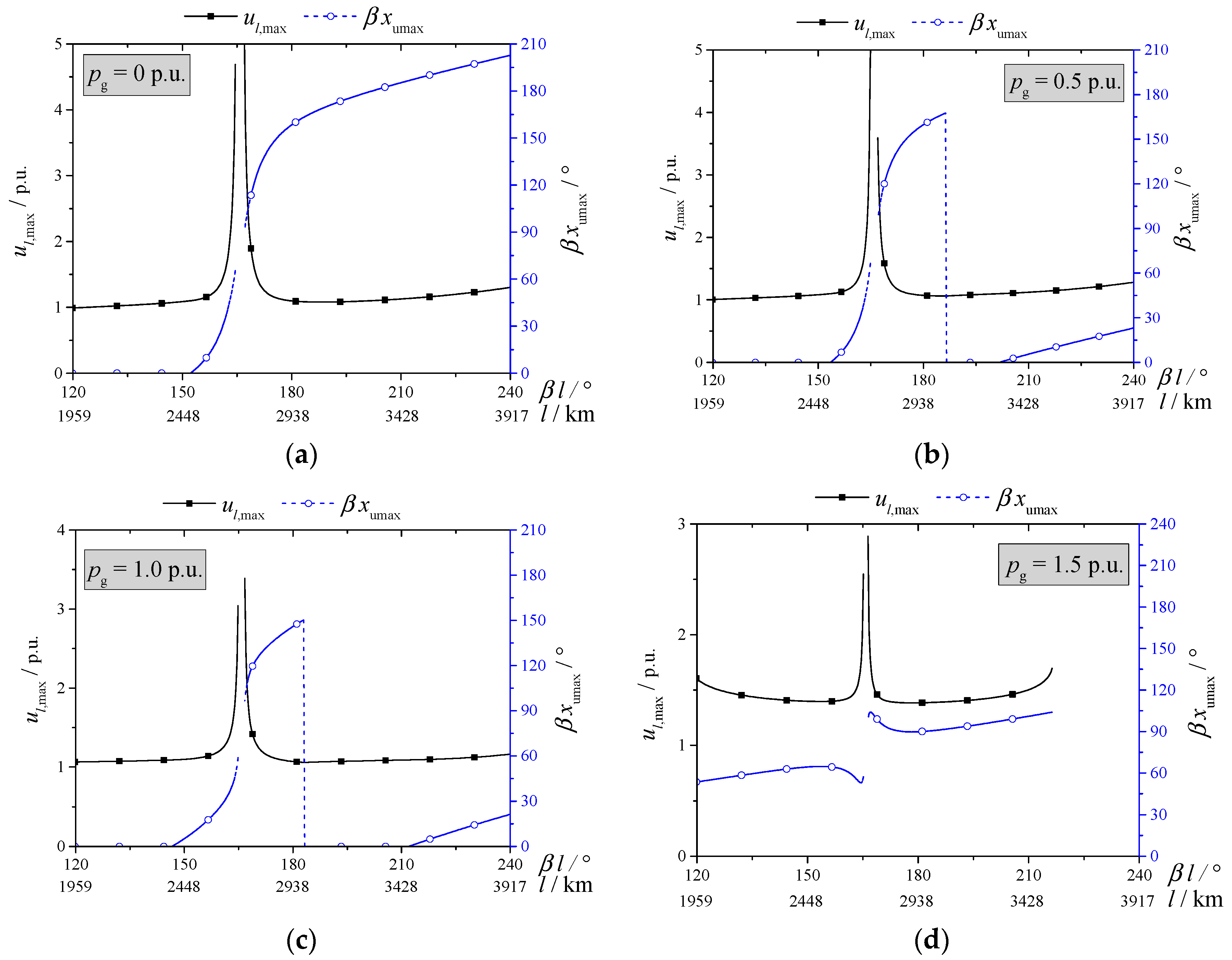
pg as a parameter, for different transmission distances, the maximum voltage along the whole transmission line, which is defined as
ul,max, is calculated as shown in
Figure 3.
Figure 3a is a large range picture of
ul,max in different transmission distances; while
Figure 3b is a small range picture of
ul,max for clearer presentation.
- (1)
Under different pg, when l gets closer to lresnt, ul,max has an abrupt increase;
- (2)
As shown in
Figure 3b, for
l in the range of 163.3°–164.6° and 167.0°–168.2°,
ul,max decreases with the increase of
pg;
- (3)
As shown in
Figure 3a, when
pg is 1.5 p.u., there is obvious overvoltage for all the transmission distances and
ul,max is close to
pg for most transmission distances. Actually, this is true for any transmission power larger than 1.0 p.u.
- (4)
As shown in
Figure 3a, there is no operation point when
pg is 1.5 p.u. and
βl is larger than 217.1°; similarly, as shown in
Figure 3b, there is no operation point when
pg is 0.0 p.u. and
βl is in the range of 164.6°–167.0°.
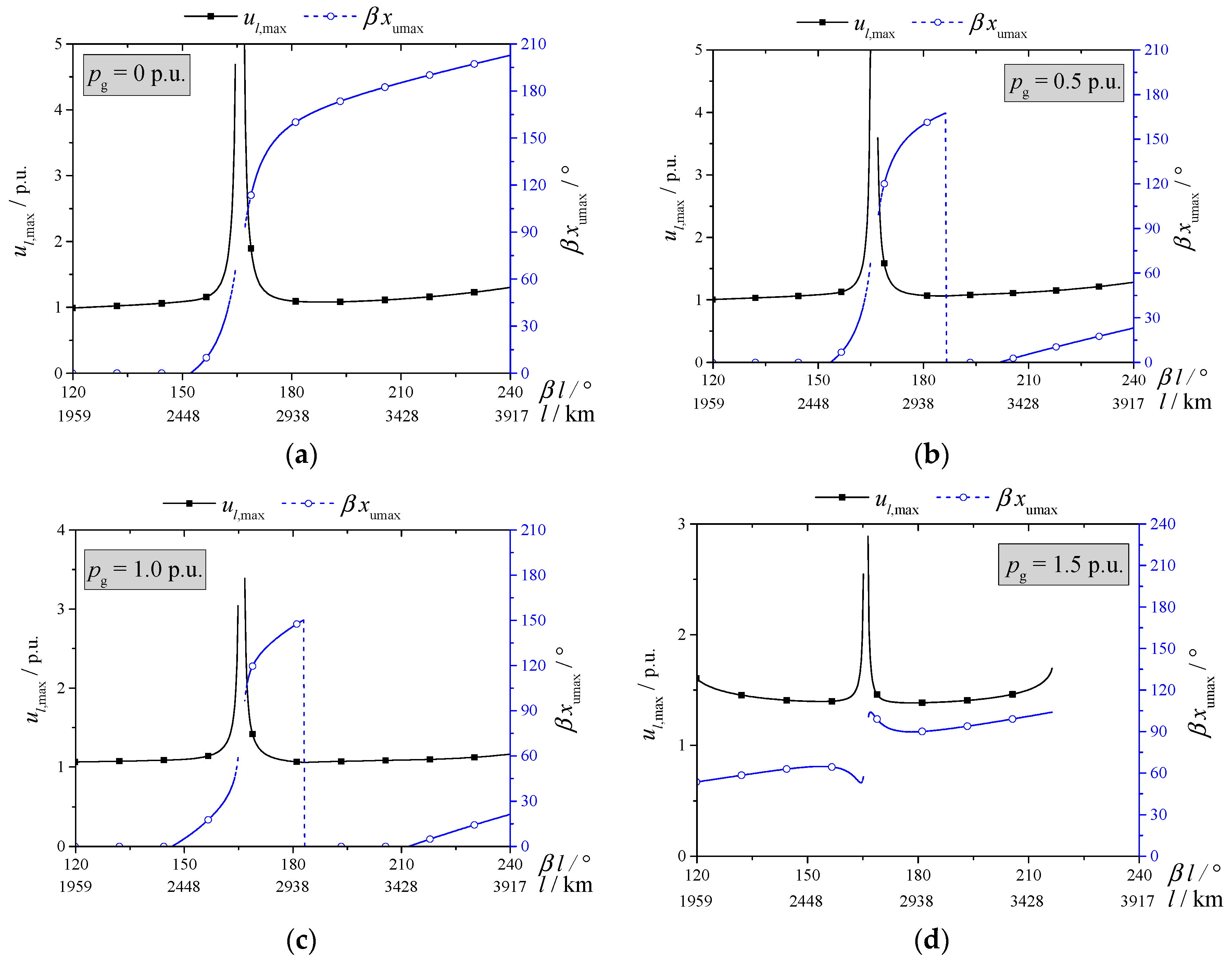
Figure 3 only gives the maximum voltage along the whole line, we still need to know the location where the maximum voltage occurs. The location where the maximum voltage (
ul,max) occurs is defined as
xumax (in km) or
βxumax (in deg.). The maximum voltage (
ul,max) and its location (
βxumax) for different transmission distances with fixed transmission power are illustrated in
Figure 4 and described in
Table 3.
As shown in
Figure 4 and
Table 3, taking
pg = 1.0 p.u for example, when the transmission distance is 2448.3 km (150°), 2725.8 km (167°), 2938.0 km (180°), and 3427.7 km (210°), respectively, the maximum voltage along the transmission line (
ul,max) is 1.098 p.u., 2.446 p.u., 1.071 p.u., and 1.088 p.u., respectively, and the location where the maximum voltage occurs (
xumax or
βxumax) is 88.1 km (5.4°), 1682.8 km (103.1°), 2378.1 km (145.7°), and 0.0 km (0°), respectively.
If we choose
ul,max < 1.5 p.u. as the permissible range of overvoltage, when
pg changes from 0 p.u. to 1.5 p.u., the feasible range of transmission distance for the test system is:
5. Small Signal Synchronization Stability Analysis
The rotor motion equation of the system is:
where
ω0,
ωg,
H,
pm, and
D are the rated angular frequency of the system, the angular frequency of the generator, the inertia time constant, the mechanical power and the damping coefficient of the generator, respectively. When
pm is supposed to be constant, the linearized equation of the rotor motion equation at the operating point (
δg(0),
ω0) is:
where
K1, Δ
loss and
have been defined in (13)–(18).
The characteristic equation of the system is:
Because
H and
D are positive, the small signal synchronization stability condition of the system finally becomes:
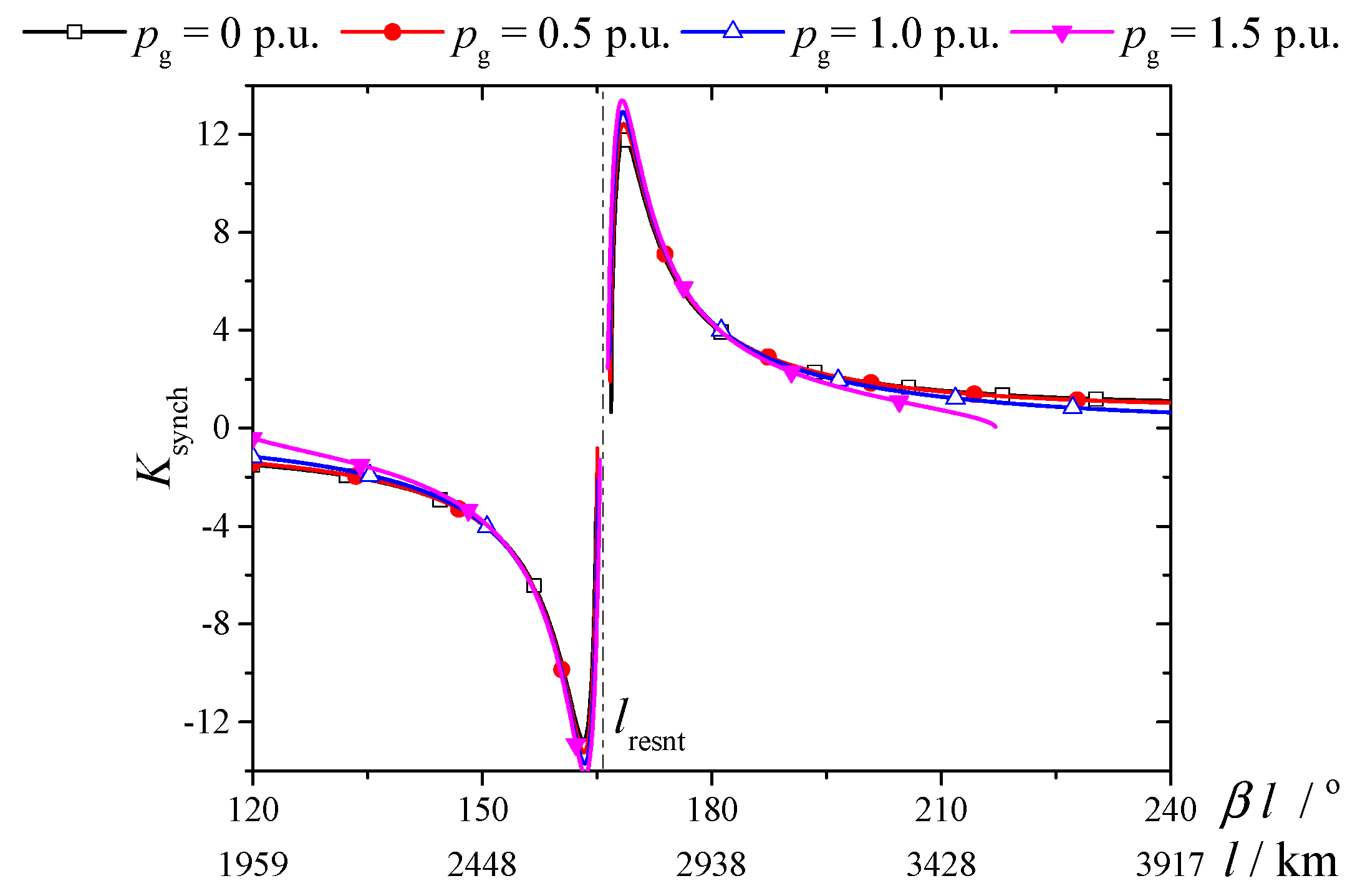
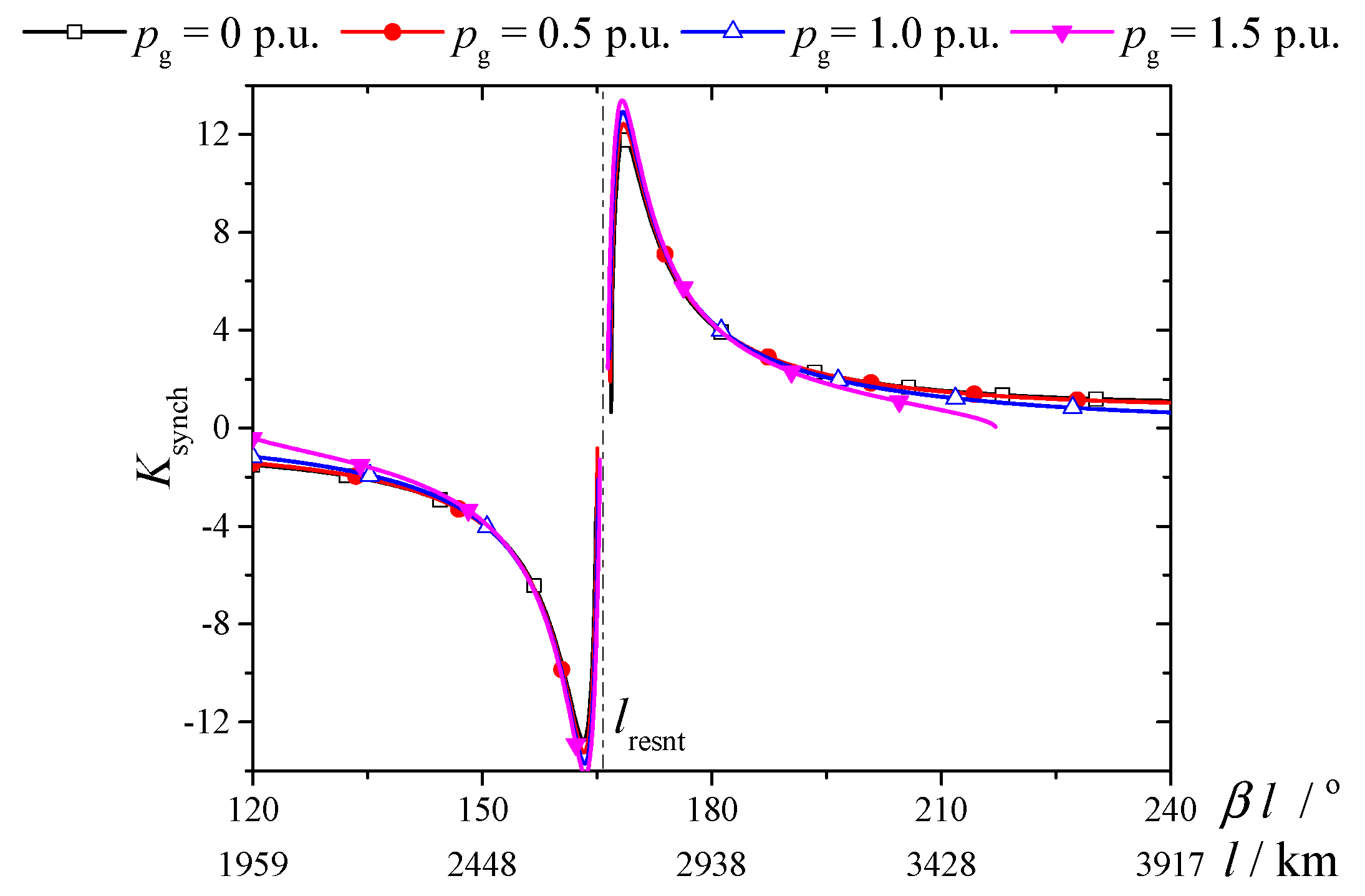
We define
Ksynch as the synchronization coefficient. The characteristic of the half-wavelength transmission system can be summarized as: if
Ksynch is positive, the system is stable under small disturbances; otherwise, the system is unstable. For the test system with the terminal condition of
eg = 1.1 p.u. and
er = 1.0 p.u., the synchronization coefficient are calculated under different transmission distances with fixed transmission power
pg. The results are shown in
Figure 5 and described in
Table 4.
As shown in
Figure 5 and
Table 4, taking
βl = 150° for example, when
pg = 0 p.u., 0.5 p.u., 1.0 p.u., and 1.5 p.u., respectively,
Ksynch = −3.88, −3.91, −3.88 and −3.78 respectively. From
Figure 5 we can see: in the studied transmission distance range, when
l is smaller than
lresnt,
Ksynch is negative; and when
l is greater than
lresnt, e.g.,
βl = 167°,
Ksynch becomes positive. So, only when
l is larger than
lresnt, may the system be stable. Considering the small signal synchronization stability condition of the test system, when
pg changes from 0 p.u. to 1.5 p.u., the feasible transmission distance range is:
7. Transient Overvoltage Analysis
This section studies the transient overvoltage characteristic under three-phase short circuit faults. The test system and the transient model mentioned in
Section 2 are adopted. The transmission distance is supposed to be in the feasible range given by (34). The system is in the steady state at
t = 0−, and the fault occurs at
t = 0+. The system model under the three-phase short circuit fault is shown in
Figure 7.
In
Figure 7, all the per-unit values in lower-case letters are based on SIL and the rated voltage of the transmission line. The meanings of the variables in
Figure 7 are the same as in
Figure 1. Besides,
lf is the distance between the fault point and the sending end;
uf is the voltage of the fault point;
isf and
irf are the currents of the fault point;
zsf is the input impedance seen from the sending end.
When the phase angle of
Zc is ignored, using
uf = 0 and the long line equations, we can deduce:
Then, the input impedance
zsf can be expressed as:
During the fault period, the magnitude of
eg is constant. According to (36) and the sending end equivalent circuit shown in
Figure 7b,
us and
is can be expressed as:
According to the long line equations and (37), we can calculate
ux by:
Then the magnitude of
ux is:
It can be proved that when the imaginary part of (th
γlf +
jxg) is zero,
ux will get its maximum value
ufmax. So we define
lfmax as the solution of the equation Im
(th
γlfmax + jxg) = 0, whose meaning is the fault distance which will cause the largest overvoltage compared to the other fault distance. After
lfmax is defined, we next define the location at which the maximum overvoltage occurs, which is defined as
xf,umax. The meaning of
xf,umax is: when a three phase fault occurs at
lfmax, the maximum overvoltage
ufmax will occur at
xf,umax. According to the definitions of
ufmax,
lfmax, and
xf,umax, we can derive their expressions from (39) as:
It is shown by (40) that lfmax is shorter than the half wavelength, and it is independent of eg and er. For the test system, βlfmax is about 168.7°, which is smaller than any feasible transmission distance given by (34). This means that there is always a fault point on the transmission line that will cause the maximum overvoltage.
According to (41), the maximum overvoltage occurs at the point exactly a quarter wavelength away from the fault point.
Using (42), we can estimate the maximum overvoltage ufmax. Because , and xg < 1, p.u. So the power-frequency overvoltage is larger than 10 p.u. for the test system. Actually, such a serious overvoltage is unacceptable in the actual power system.
Simulations have been done by PSS/E to illustrate the above conclusion. The structure of the test system is shown in
Figure 1. The system parameters given in
Section 2 are adopted. The transmission distance is 3200 km. From the sending end of line, a voltage measurement point is set every 160 km, and is numbered from 0 to 20. According to the previous analysis, when the fault point is 2753.4 km away from the sending end (i.e.,
lfmax = 2753.4 km), the maximum overvoltage (
ufmax) will occur at the point 1284.4 km away from the sending end (i.e.,
xf,umax = 1284.4 km), which is near the 8th measurement point (which is 1280 km away from the sending end).
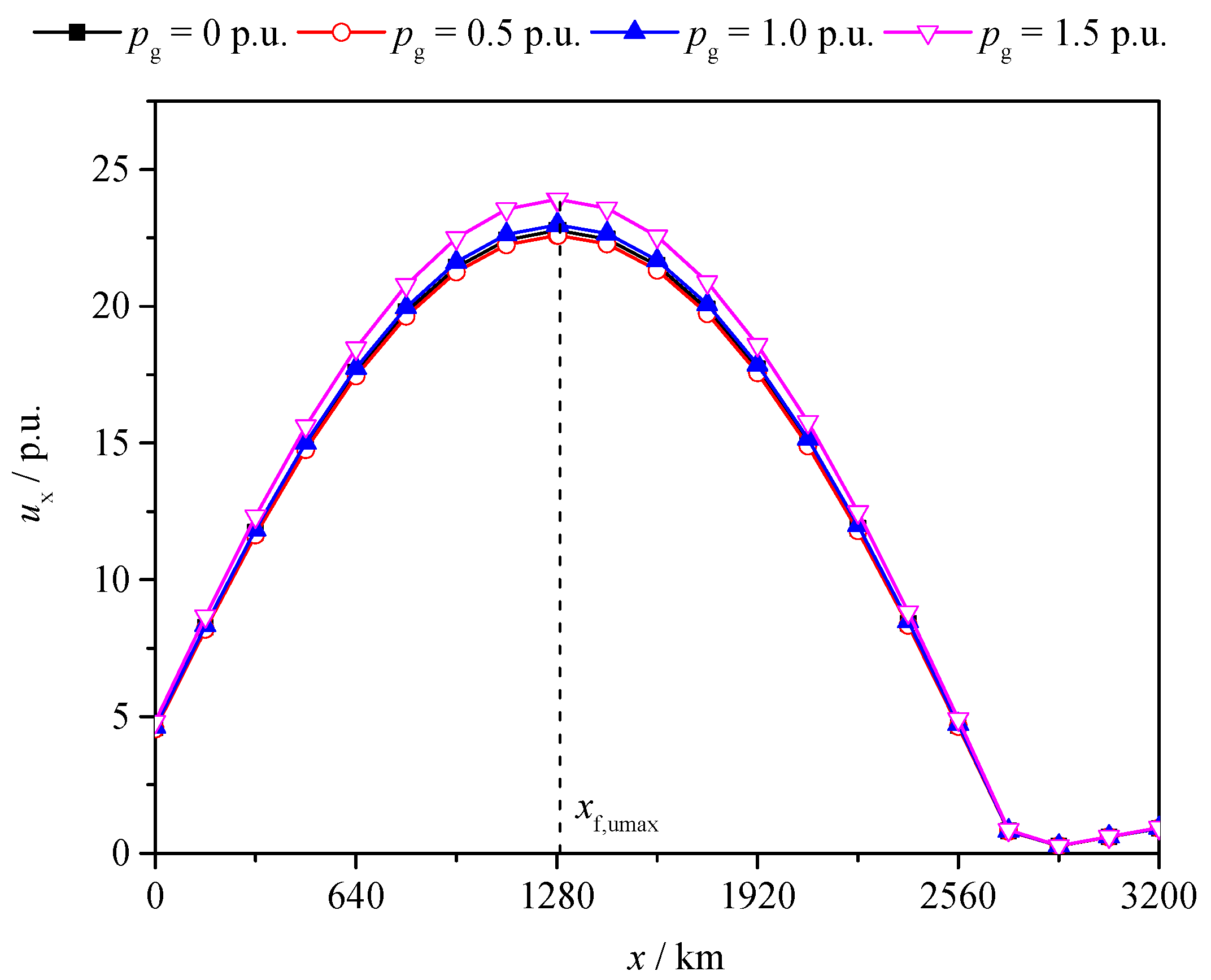
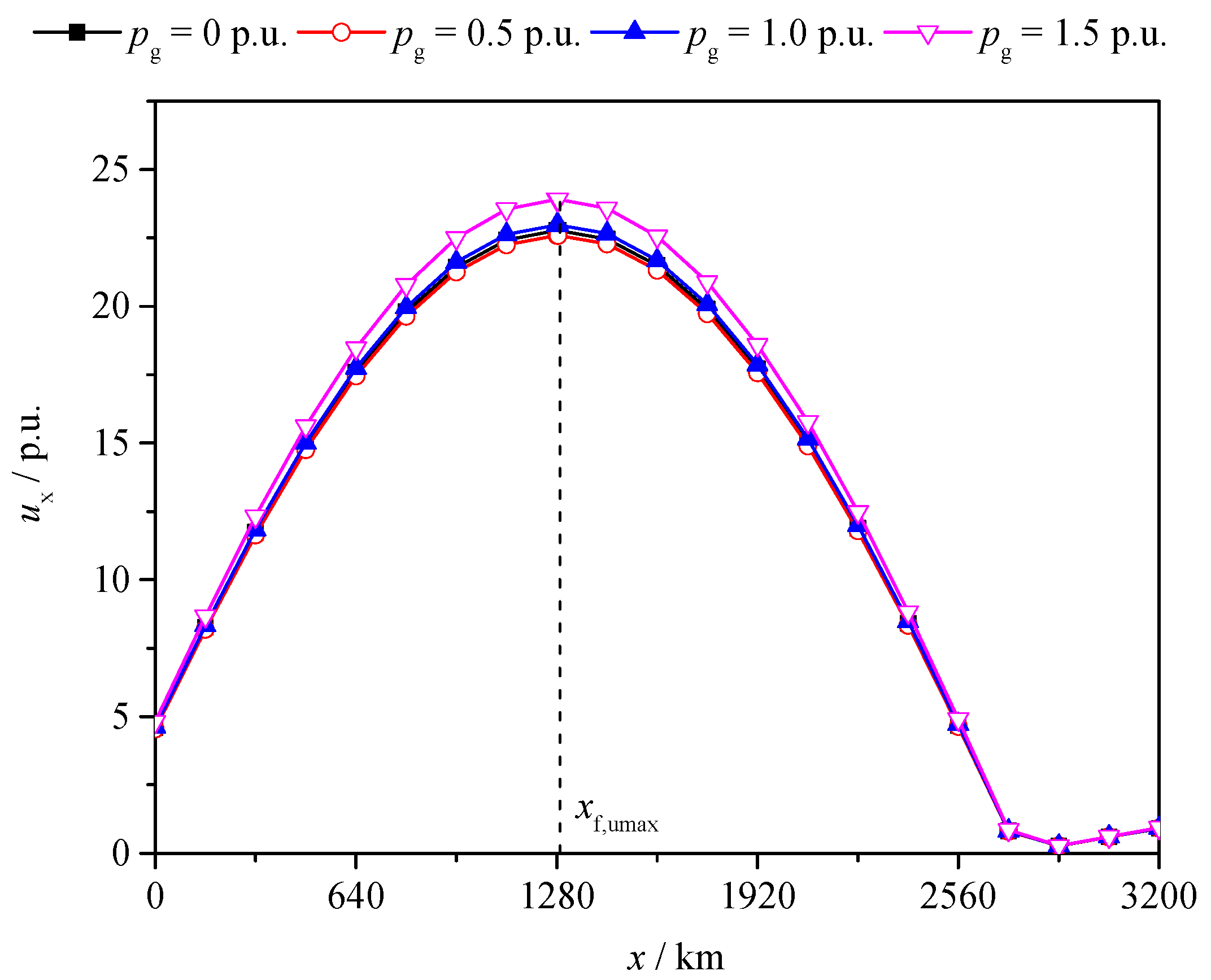
When the above fault occurs, the voltage profile of the line is shown in
Figure 8.
As shown in
Figure 8, when
pg = 0 p.u., 0.5 p.u., 1.0 p.u., and 1.5 p.u., respectively, the maximum overvoltage is 22.77 p.u., 22.59 p.u., 22.98 p.u., and 23.91 p.u., respectively. This example illustrates that the maximum overvoltage (
ufmax) is much larger than 10 p.u., which cannot be accepted in real engineering.
8. Transient Synchronization Stability Analysis
During the fault period, the power of the sending end can be calculated by:
According to (43), the electromagnetic power of the sending-end generator is not varied with time during the fault period. We denote it by
ps(1). When
lf =
lfmax,
ps(1) gets its maximum value
psmax(1):
Because when lf = lfmax, both ps(1) and ux get their maximum values, we define lfmax as the most serious fault point. Using (44), we can estimate the maximum electromagnetic power. Because , and xg < 1, so p.u.
During the fault period, the rotor motion equation is:
If the effect of the governor is ignored,
pm =
ps(0), where
ps(0) is the electromagnetic power of the steady state. For the convenience of analysis,
D is supposed to be zero. If the fault is cleared at time
tclear, the states at the fault clearing time can be calculated by:
where
ωg(0) = 1.0 p.u.;
δg(0) is the phase angle difference between
eg and
er before the fault;
ωg(1) and
δg(1) are the angular frequency and phase angle difference at the fault clearing time.
Next we analyze the transient synchronization stability under the fault at the most serious fault point lfmax.
For the fault occurs at
lfmax, the states at the fault clearing time are:
After the fault is cleared, the system structure recovers. If the losses of the transmission line are ignored, the expression of the generator electromagnetic power is the same as (10):
where
ps(2) is the generator electromagnetic power after the fault is cleared.
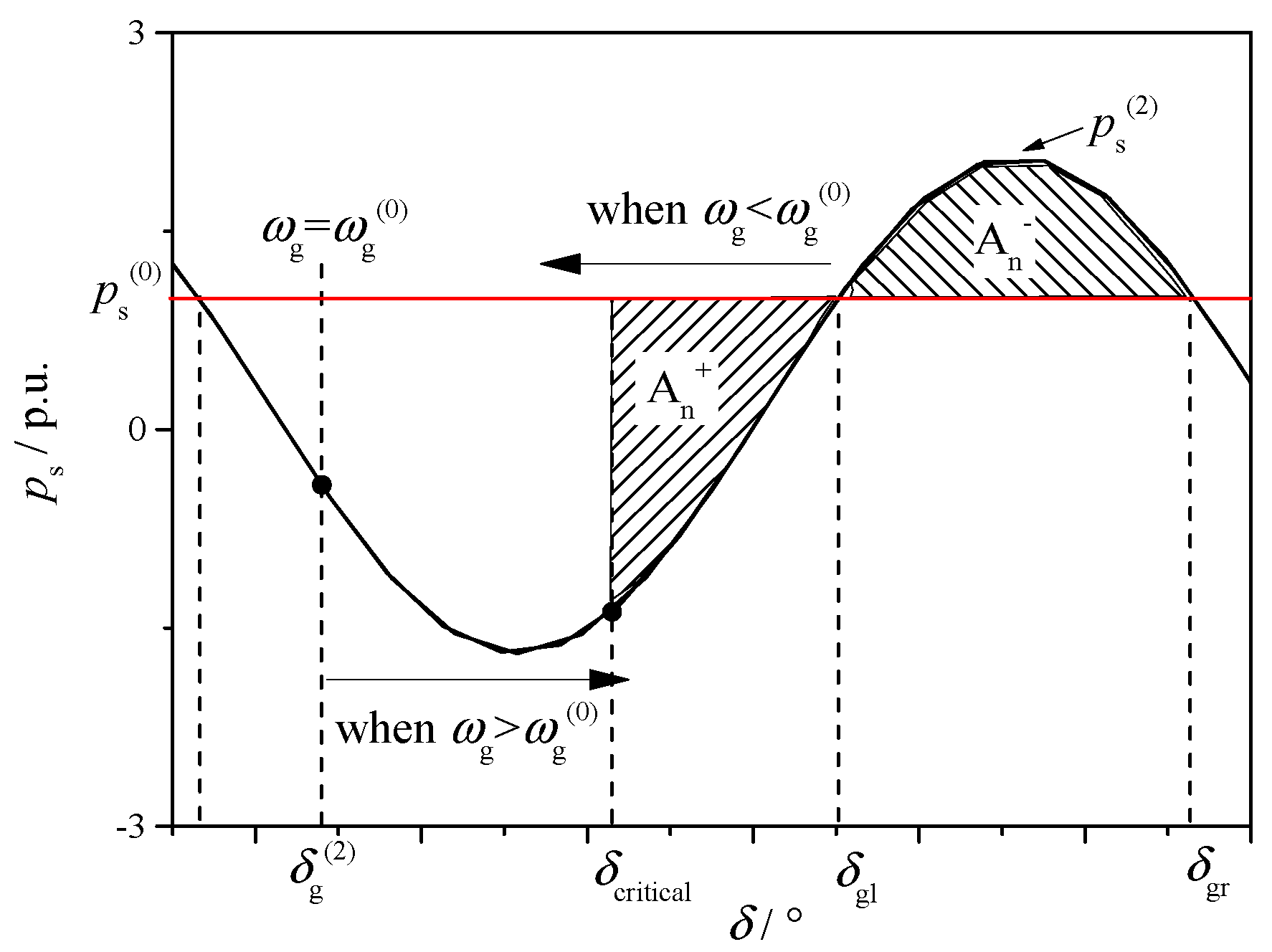
According to (48), the electromagnetic power is a sine wave with respect to the power angle of the generator, as shown in
Figure 9. During the fault period, the generator gets an initial deceleration area, A
1¯. At the fault clearing time,
ωg(1) is less than
ωg(0) according to (47), so the phase angle (
δg) will continue to decrease after the fault is cleared.
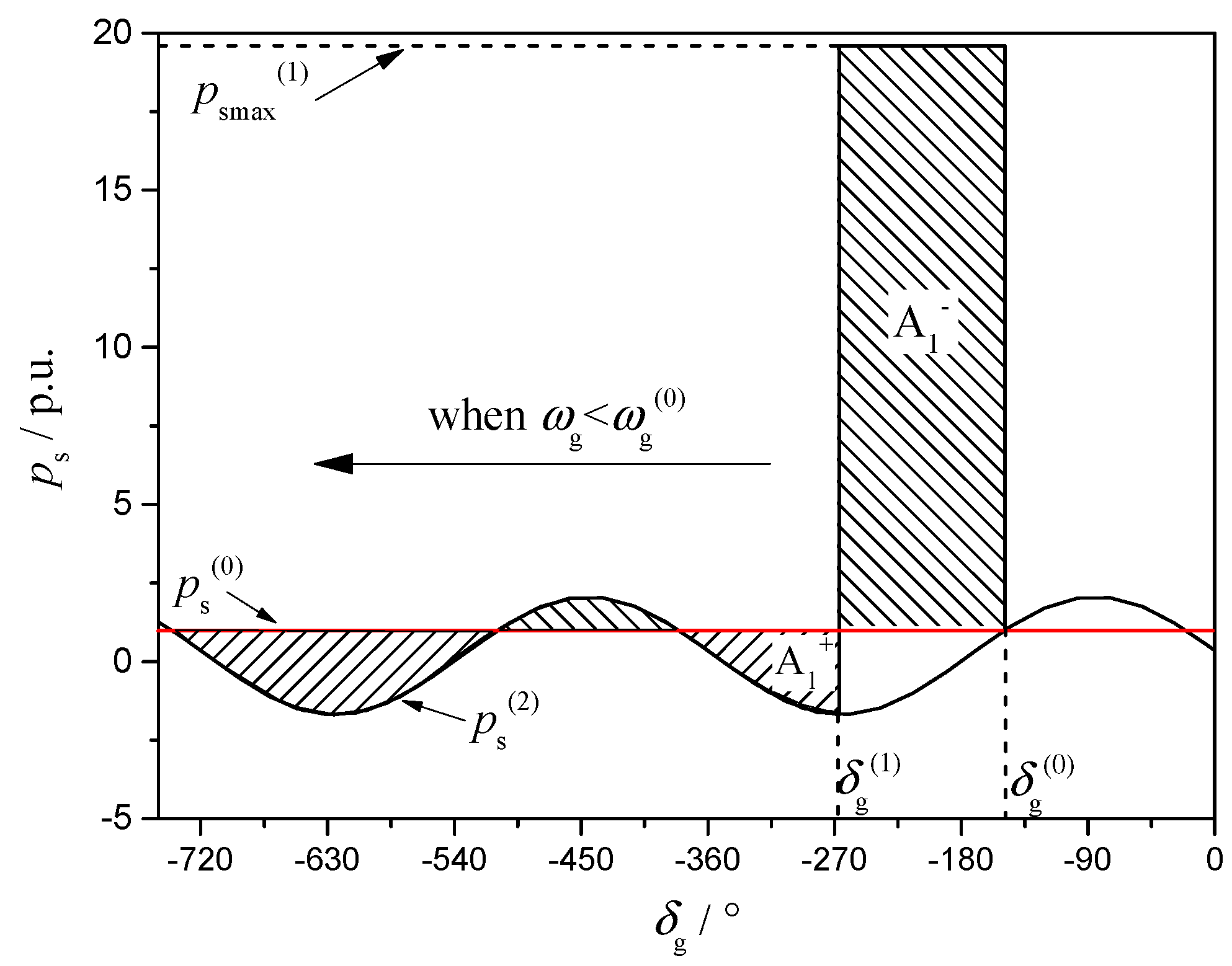
For the fault at lfmax, because psmax(1) is much larger than ps(0) and the fault clearance requires a certain amount of time, in general, the acceleration area A1+ cannot compensate A1¯. If the mechanical power of the generator is zero (ps(0) = 0), in any sinusoidal cycle of the phase angle, the acceleration area obtained by the generator is always equal to the deceleration area. The phase angle of the generator will keep decreasing after the fault. This means that the system will lose stability after the fault.
If the mechanical power of the generator is positive (
ps(0) > 0), the acceleration area is always larger than the deceleration area in a sinusoidal cycle of the phase angle, as shown in
Figure 10. This means the initial deceleration area (A
1¯) will be compensated gradually. When the initial deceleration area is totally compensated,
ωg will recover to
ωg(0). Suppose that when
δg reaches
δg(2),
ωg recovers to
ωg(0), and the initial deceleration area is totally compensated, then the last compensating area is gotten at
δg(2), this is to say,
ps must be smaller than
ps(0) when
δg is at
δg(2).
On the other hand, there is a critical phase angle (
δcritical) that makes A
n+ = A
n¯, as shown in
Figure 10. Before
ωg recovers to
ωg(0),
δg is in the decreasing state. Next we will prove that
δg(2) must be less than
δcritical, i.e.,
δg(2) must be on the left of
δcritical.
If δg(2) > δcritical, i.e., δg(2) is on the right of δcritical, then An+ cannot compensate An−, the sum of the deceleration area and the acceleration area will be negative, and ωg will be still less than ωg(0) when δg reaches (from right to left) δg(2). This contradicts to the definition of δg(2). Thereby, δg(2) must be less than δcritical, i.e., δg(2) must be on the left of δcritical.
After ωg increases to ωg(0), because δg(2) is on the left of δcritical, the acceleration area is always larger than the deceleration area. Then ωg will always be larger than ωg(0), and δg is in the increasing state. In this situation, when δg reaches δgr, ωg is still larger than ωg(0), and δg will keep increasing. The system also loses stability after the fault.
In conclusion, the phase angle δg will keep decreasing, or keep increasing after a certain time of decreasing. In both cases, the system will lose stability under the fault that occurs at the most serious fault point. Actually, the same conclusion will be obtained through similar derivation process when the losses of the transmission line are considered and the power equation is expressed as (13).
The above result shows that if the sending-end generator is modeled by the classical model, the system will lose stability under the fault that occurs at the most serious fault point.
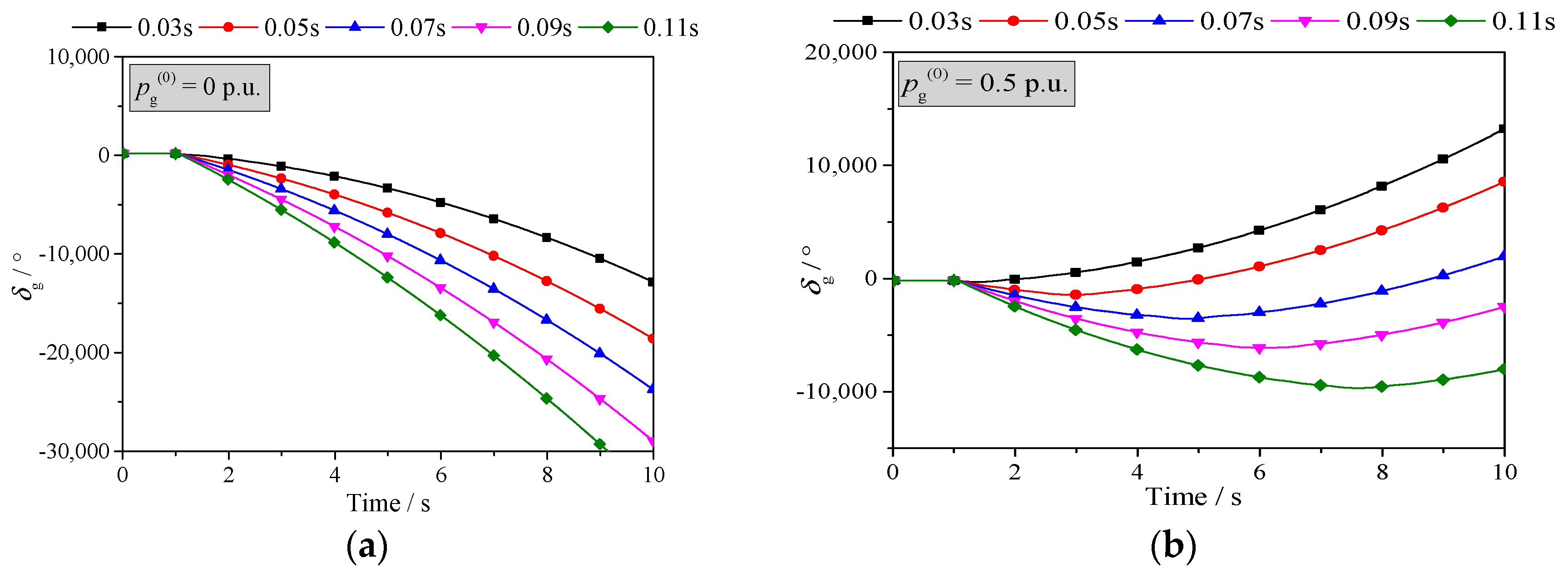
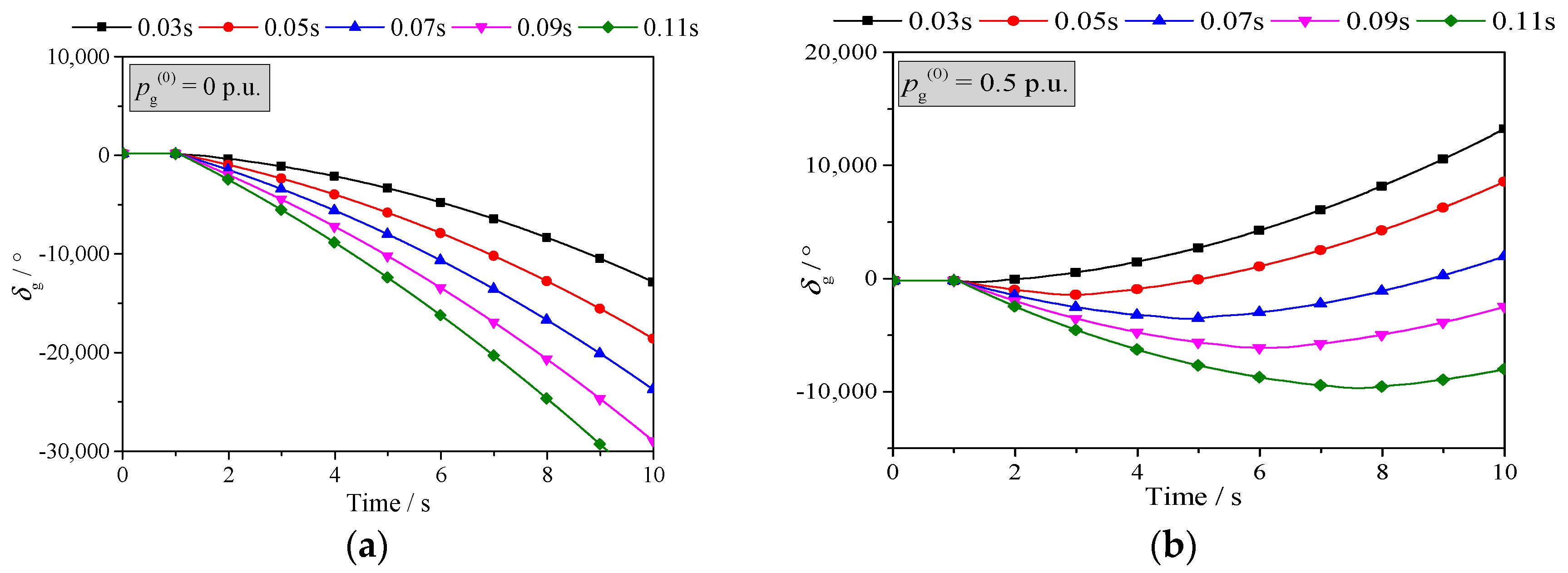
Simulations have been done to illustrate this conclusion. The test system in
Section 7 is adopted. The sending end generator is modeled by the classical model with H = 8.692 p.u. and D = 0. The receiving end system is represented by the Thevenin equivalent circuit with
xr = 0.05 p.u. In the simulations, the short circuit fault occurs at
lfmax at 1 s. The swing curves of the sending-end generator power angle under different fault clearing time (0.03–0.11 s) are shown in
Figure 11.
As shown in
Figure 11, when
pg(0) = 0 p.u.,
δg keeps decreasing after the fault. When
pg(0) = 0.5 p.u., 1.0 p.u. and 1.5 p.u. respectively,
δg keeps increasing after a certain time of decreasing. For all the cases, the system is unstable after the fault. This is consistent with the conclusion of the previous analysis.
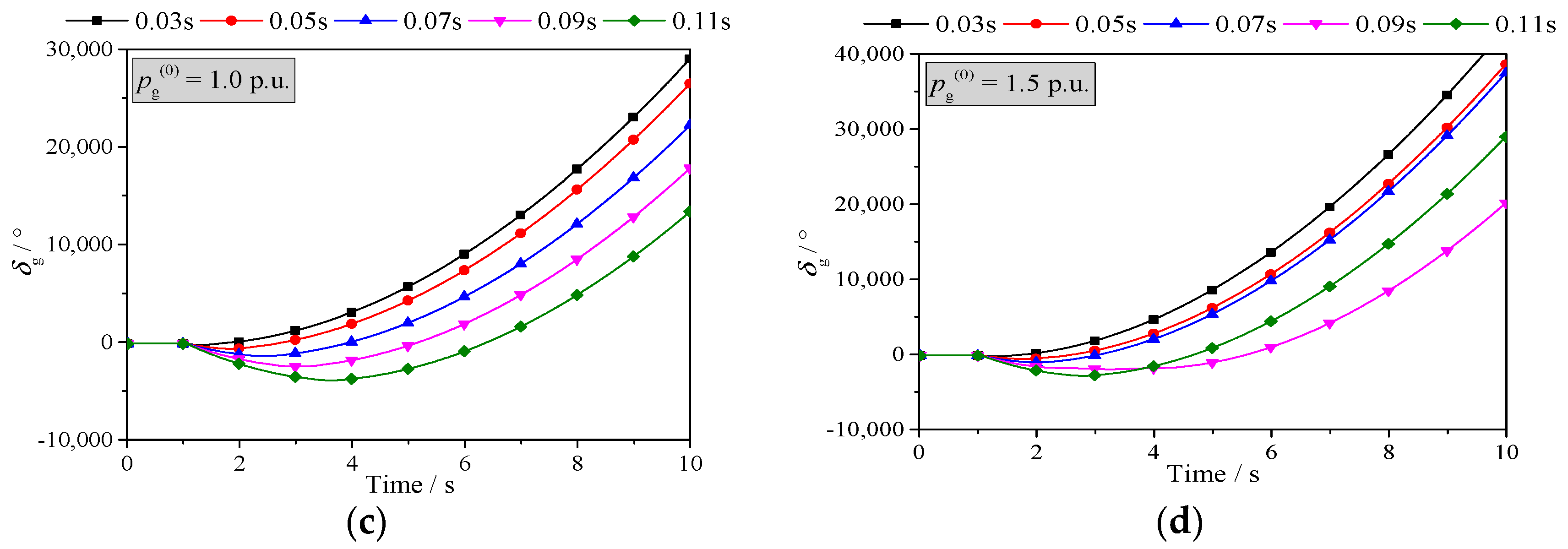
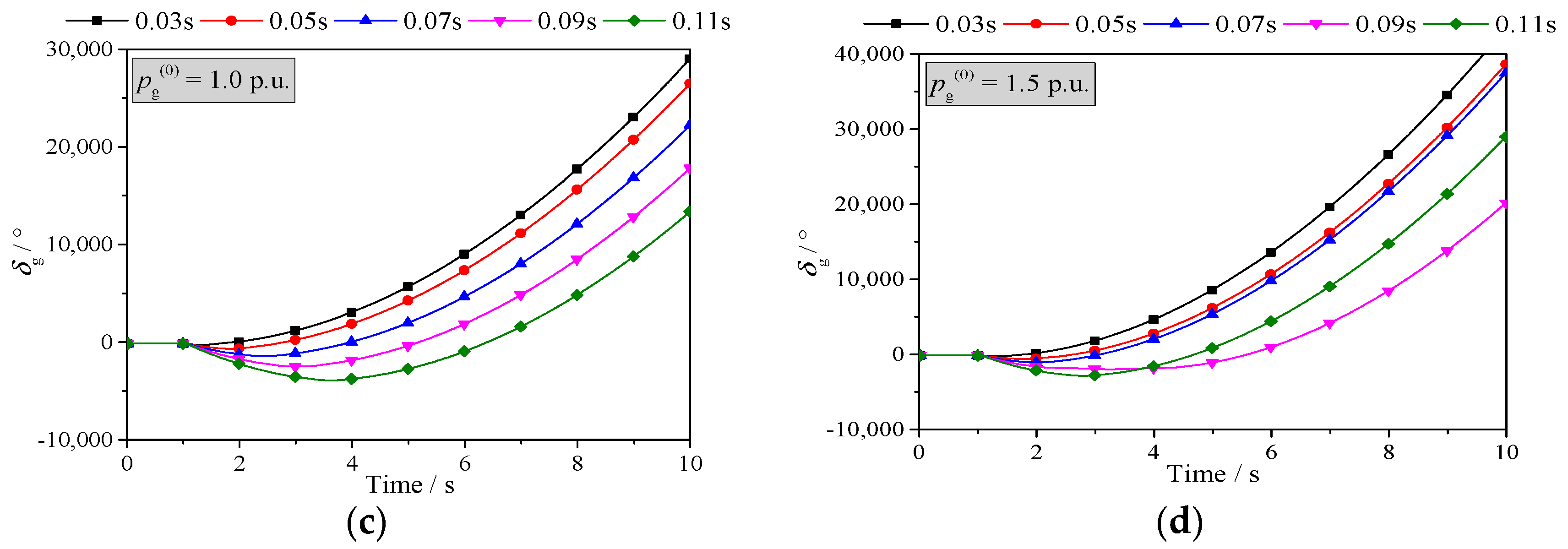
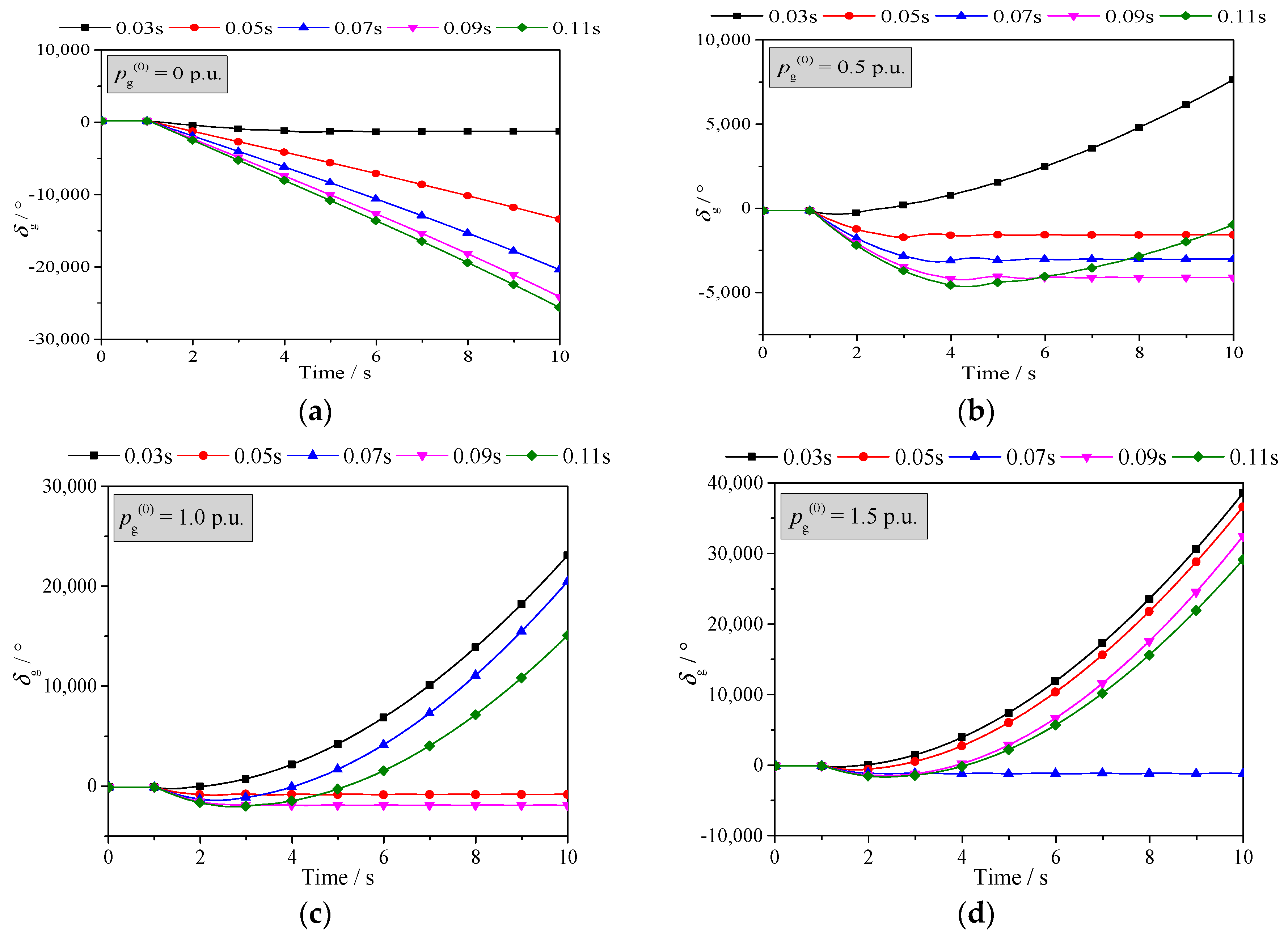
If a detailed generator model is adopted and the effect of the excitation system is considered (detailed data is given in the
Appendix A.2), the results under the same fault are shown in
Figure 12.
As shown in
Figure 12, when
pg(0) = 0 p.u., if the fault clearing time is 0.03 s, the system can keep stable; if the fault clearing time is 0.05 s, 0.07 s, 0.09 s, or 0.11 s, the system will lose stability. When
pg(0) = 0.5 p.u., if the fault clearing time is 0.05 s, 0.07 s, or 0.09 s, the system can keep stable; if the fault clearing time is 0.03 s or 0.11 s, the system will lose stability. When
pg(0) = 1.0 p.u., if fault clearing time is 0.05 s or 0.09 s, the system can keep stable; if fault clearing time is 0.03 s, 0.07 s, or 0.11 s, the system will lose stability. When
pg(0) = 1.5 p.u., if fault clearing time is 0.07 s, the system can keep stable; otherwise, the system will lose stability.
When the system loses stability, if pg(0) = 0 p.u., δg will keep decreasing; if pg(0) is positive, δg will keep increasing after a certain time of decreasing. This is the same as the result of the classical model.
In conclusion, if a detailed generator model is adopted and the effect of the excitation system is considered, the stability of the system is uncertain, it depends on the value of the fault clearing time. However, the fault clearing time that keeps the system stable is segmented, so there is no fault critical clearing time.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}