A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares

Abstract
:1. Introduction
2. Method and Analysis of Variable Forgetting Factor Strategy for Recursive Least Squares
2.1. Features of Forgetting Factor Recursive Least Squares
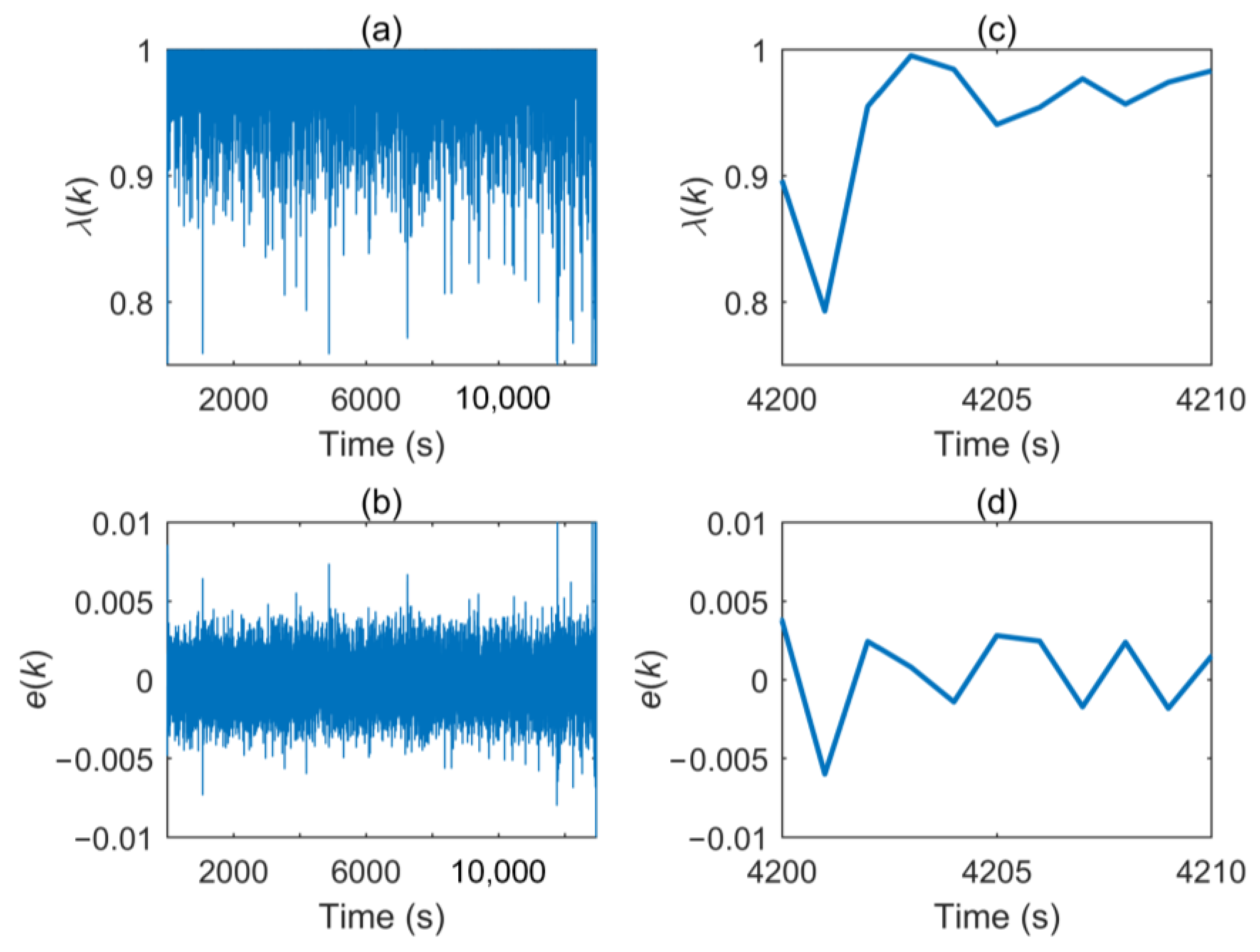
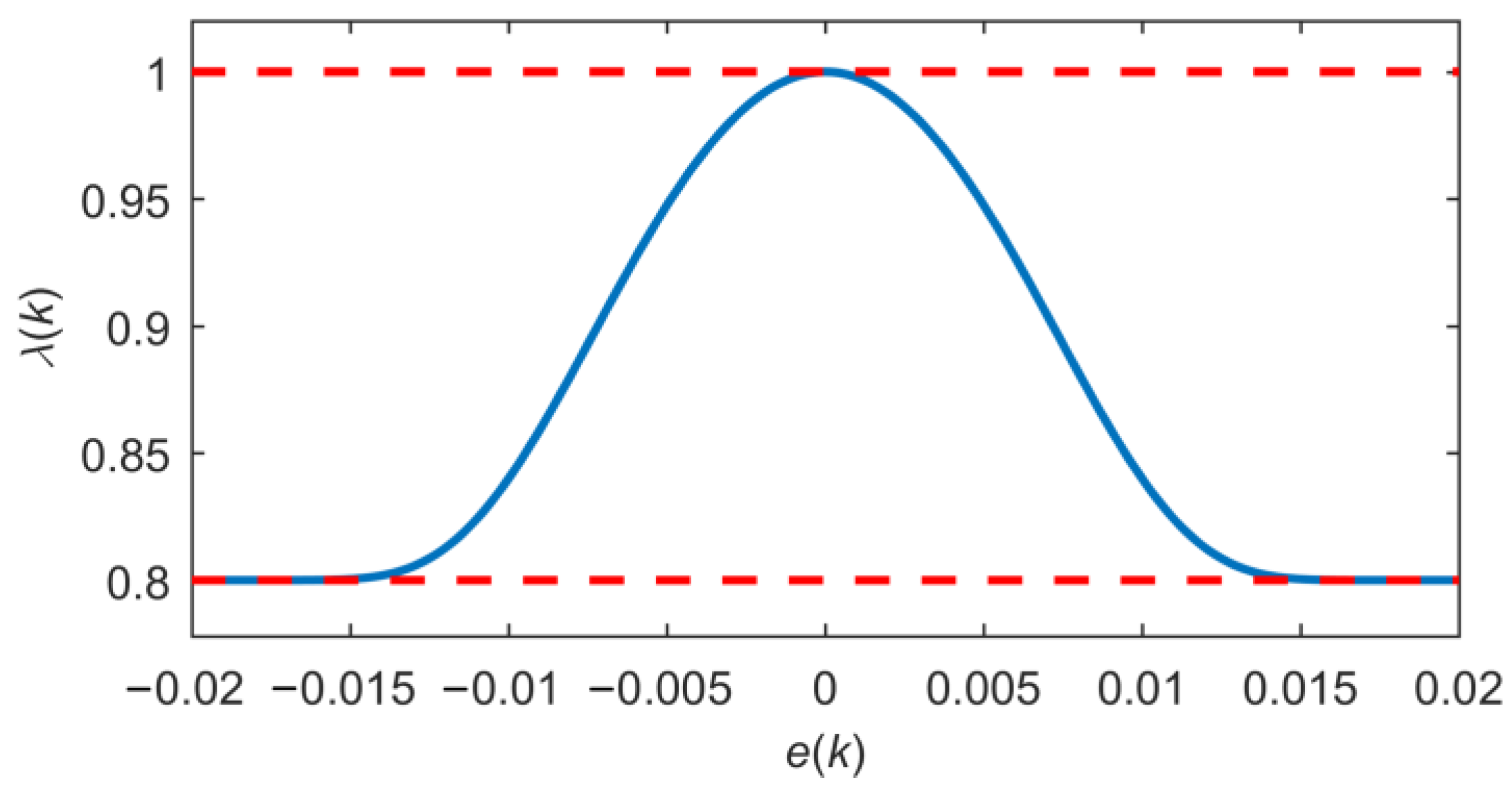
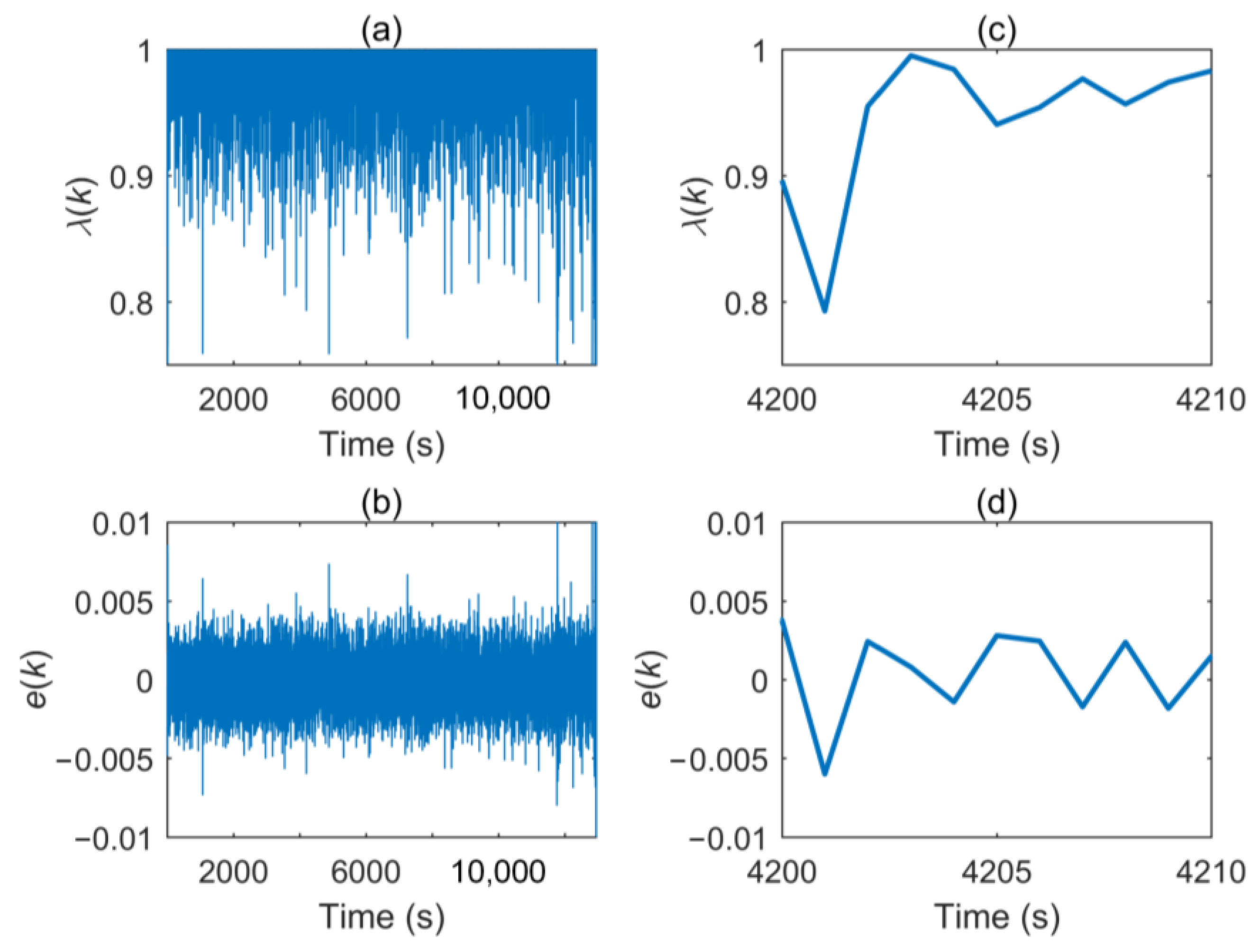
2.2. Variable Forgetting Factor Strategy Considering Errors
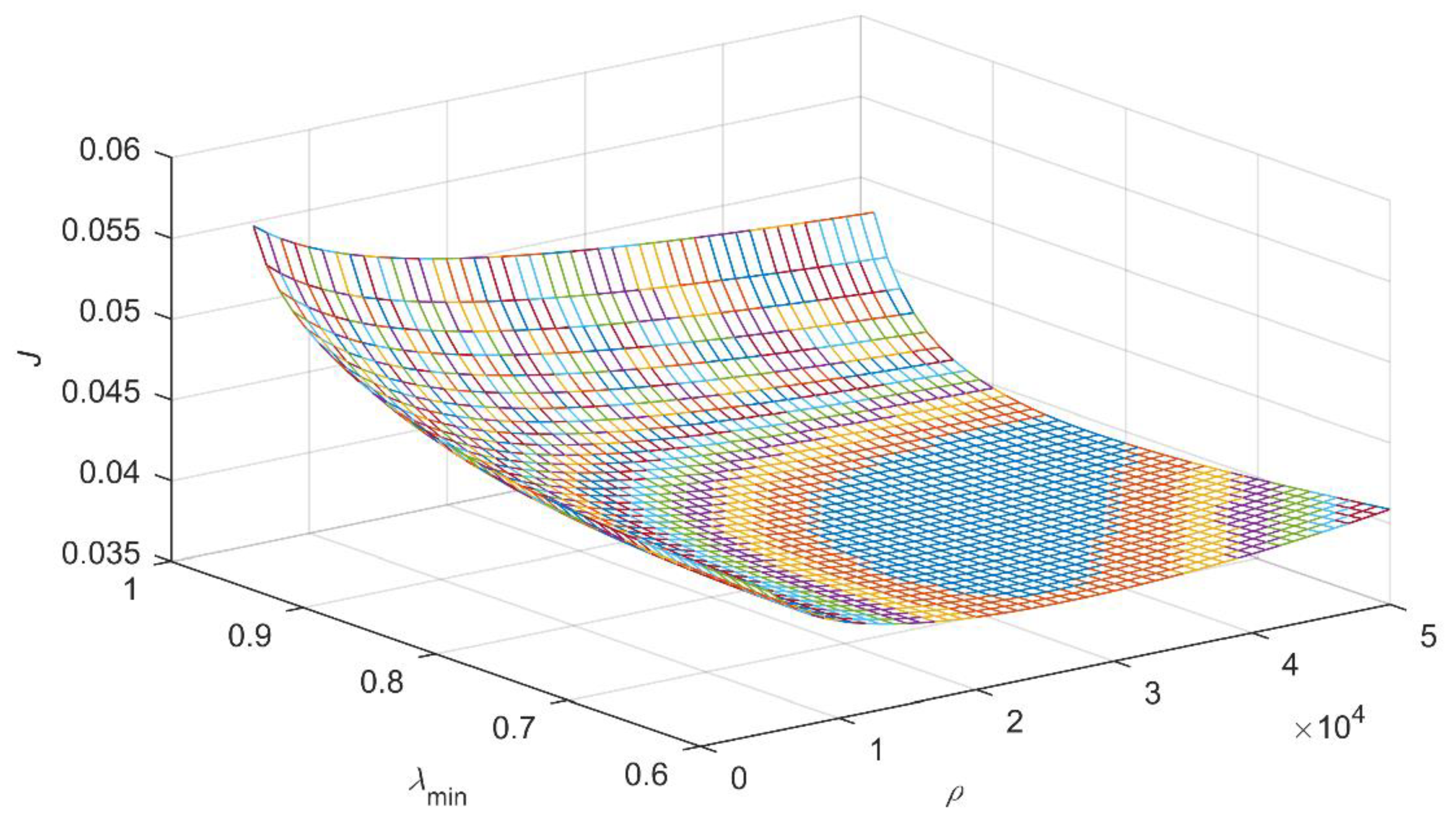
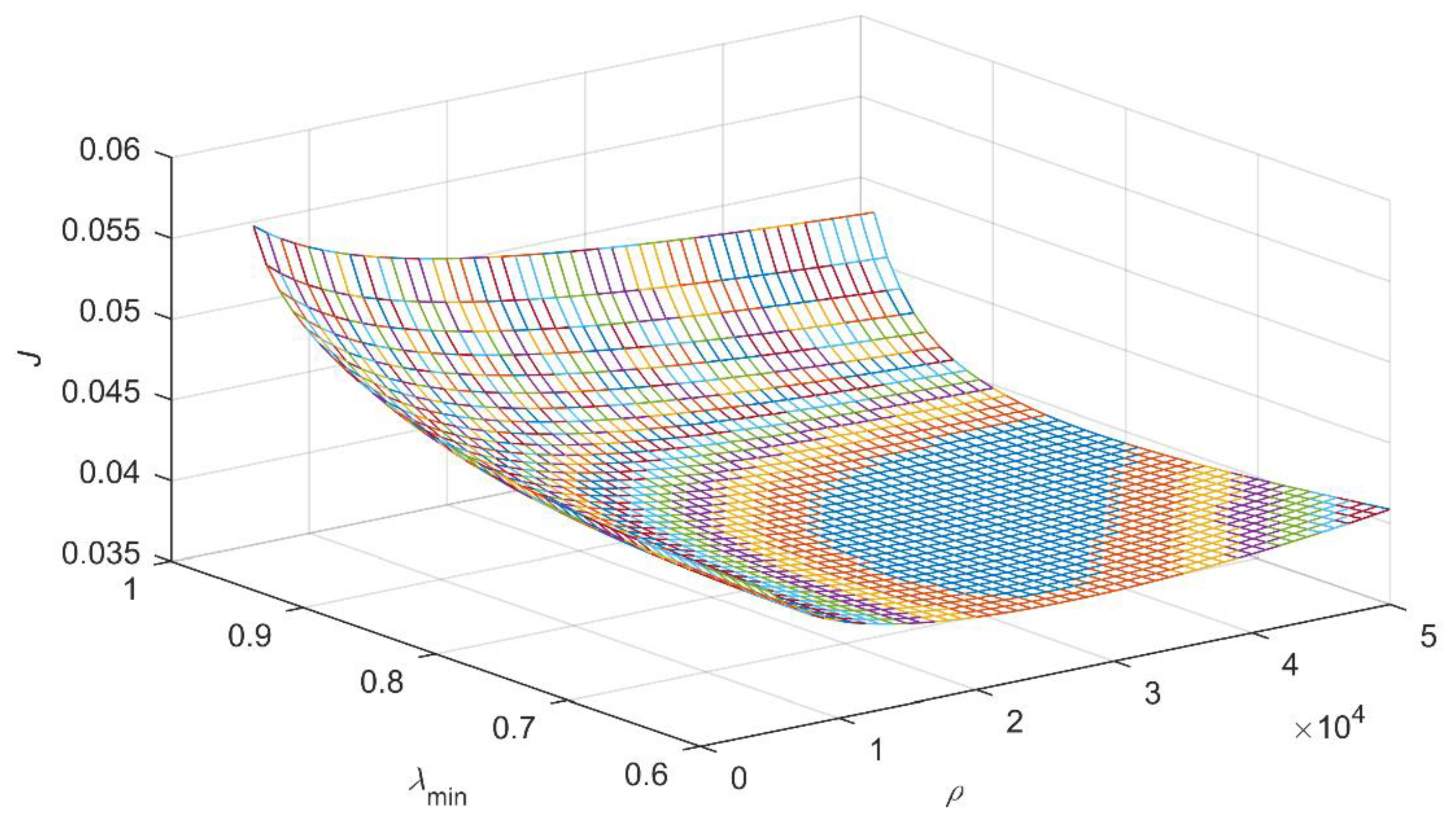
2.3. Effect of Strategy Parameters on Variable Forgetting Factor
3. Novel Methods for Lithium-Ion Battery Online Parameter Identification and State of Charge Estimation
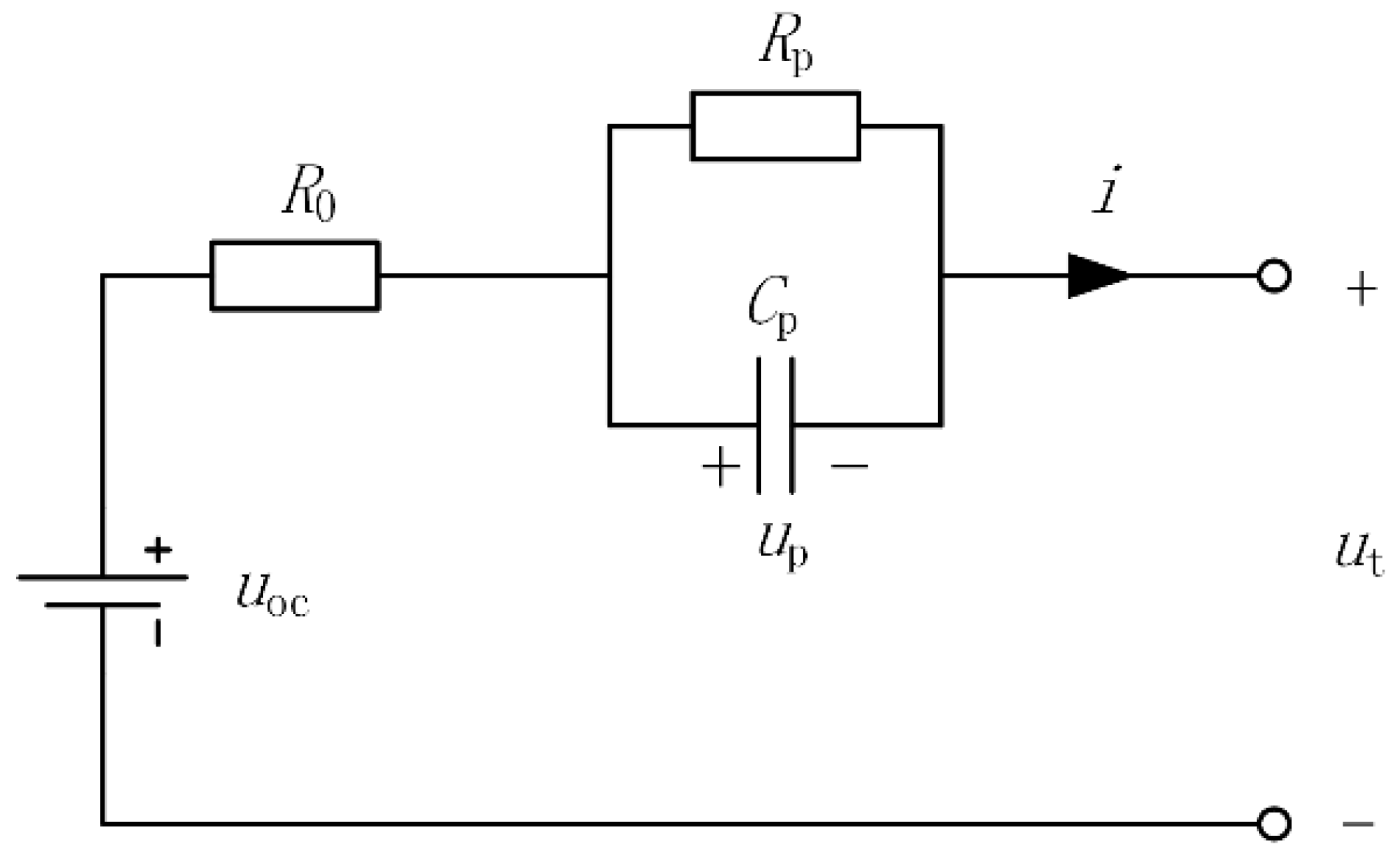
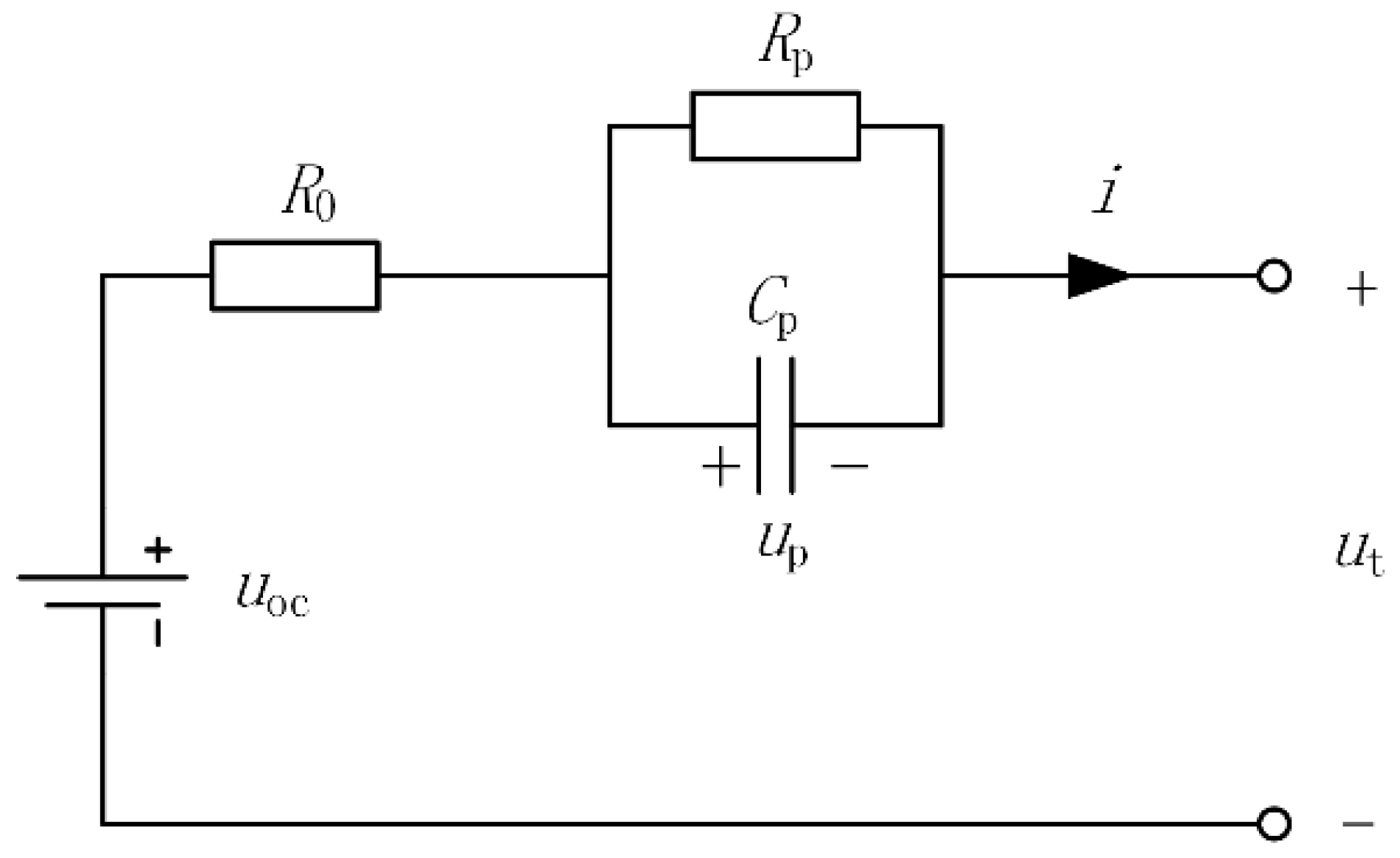
3.1. Battery Modeling
3.2. Method for Online Parameter Identification on the Basis of Variable Forgetting Factor Recursive Least Squares
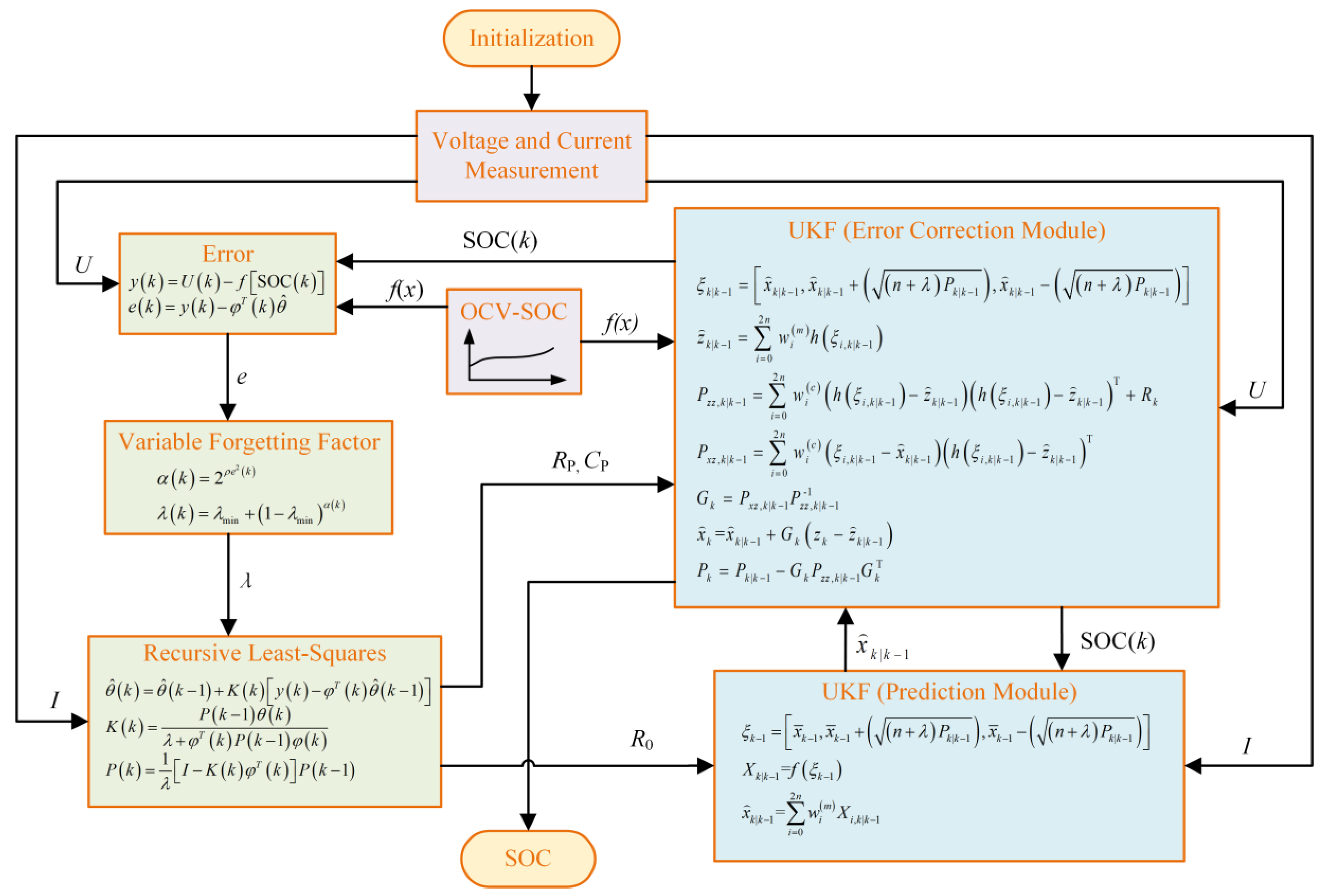
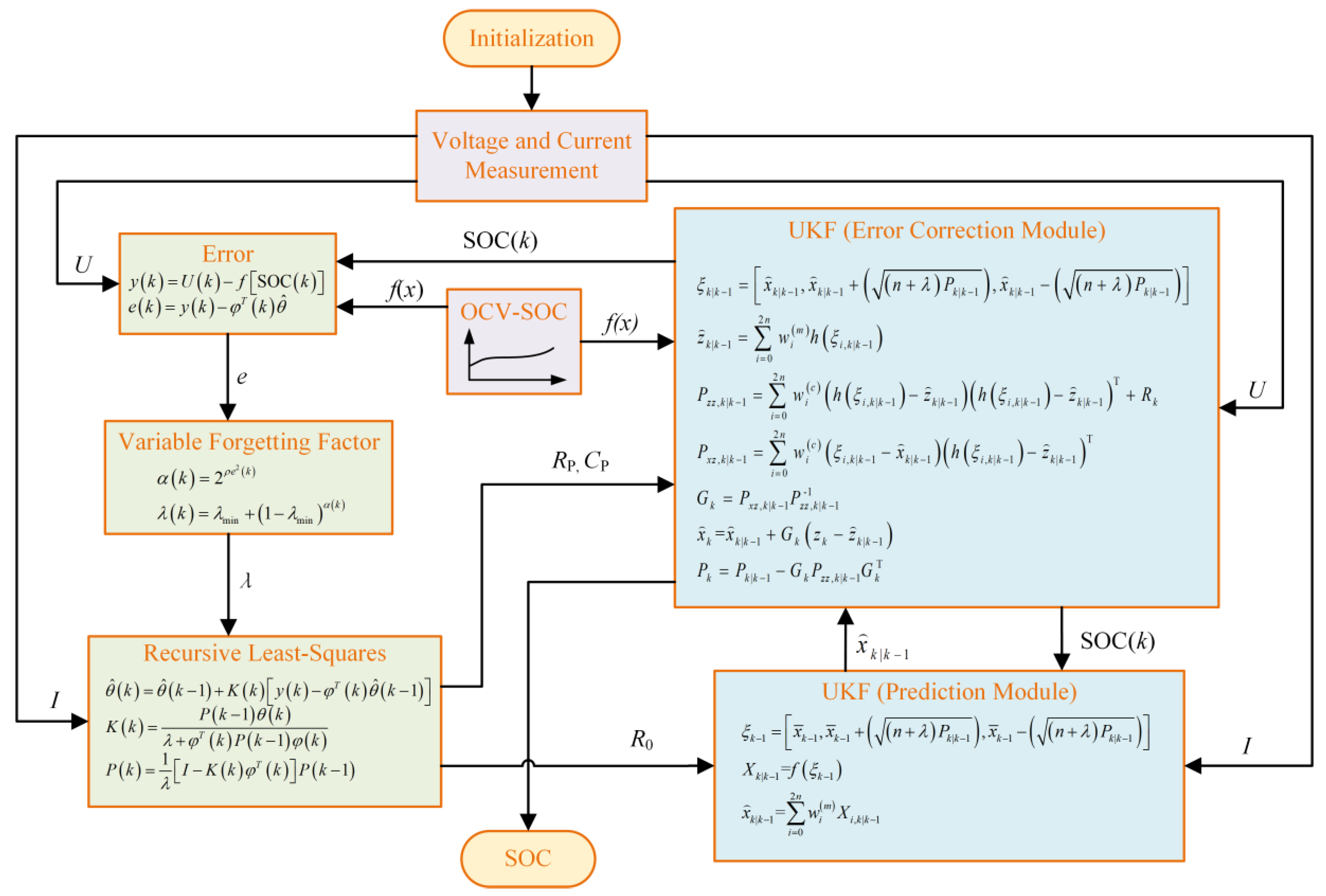
3.3. Joint Algorithm of State of Charge Estimation
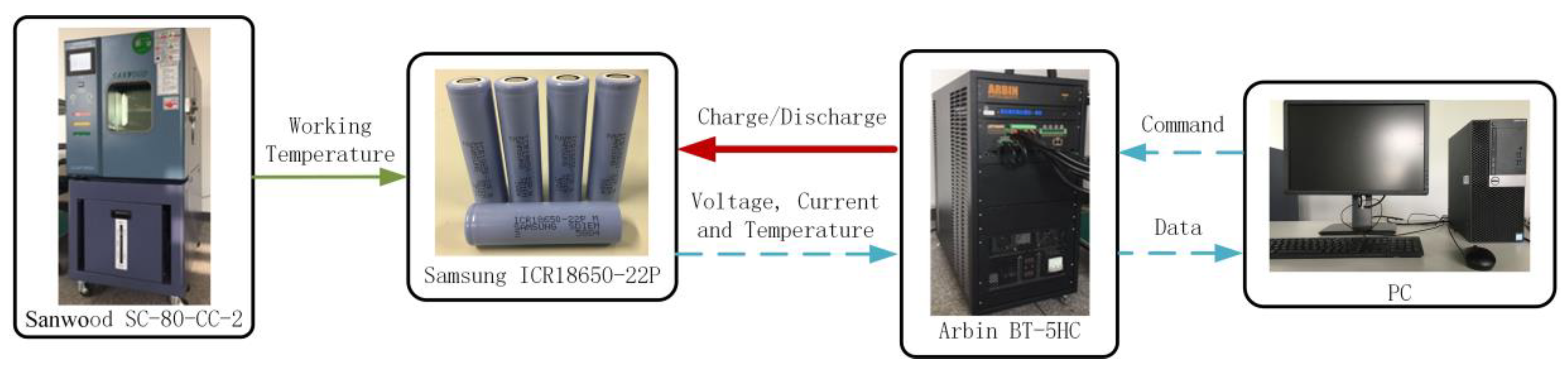
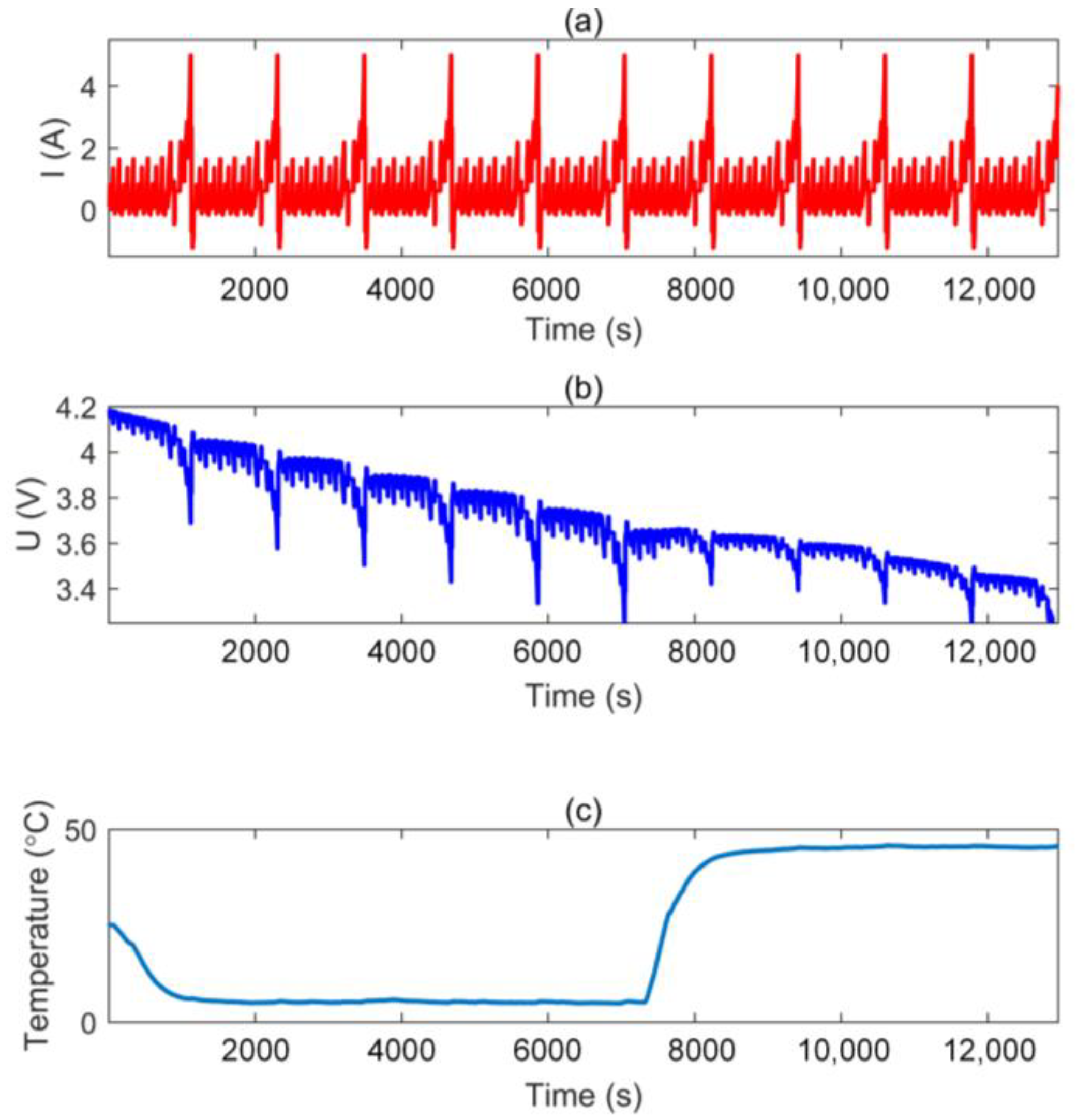
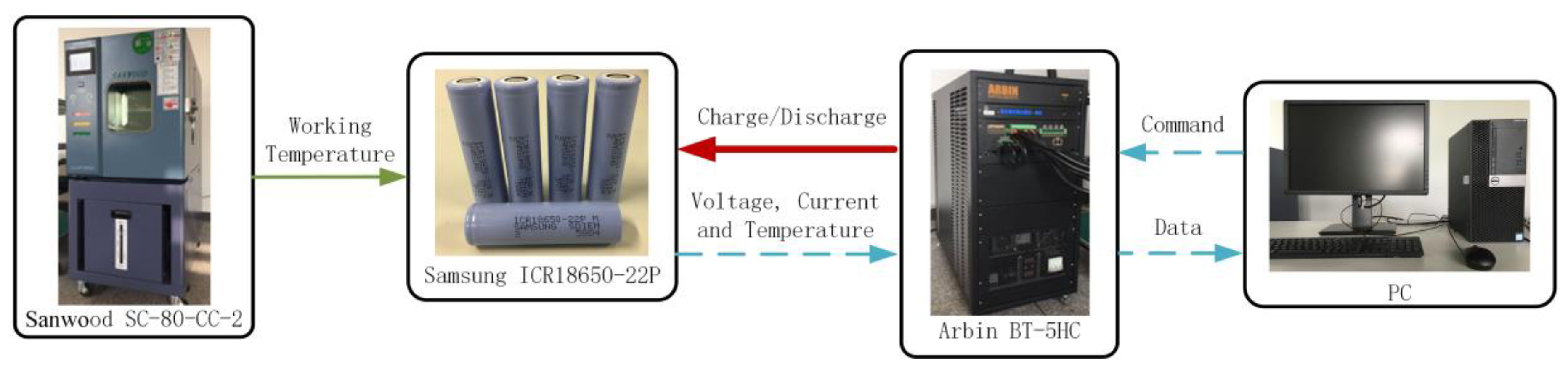
4. Experiment and Discussion
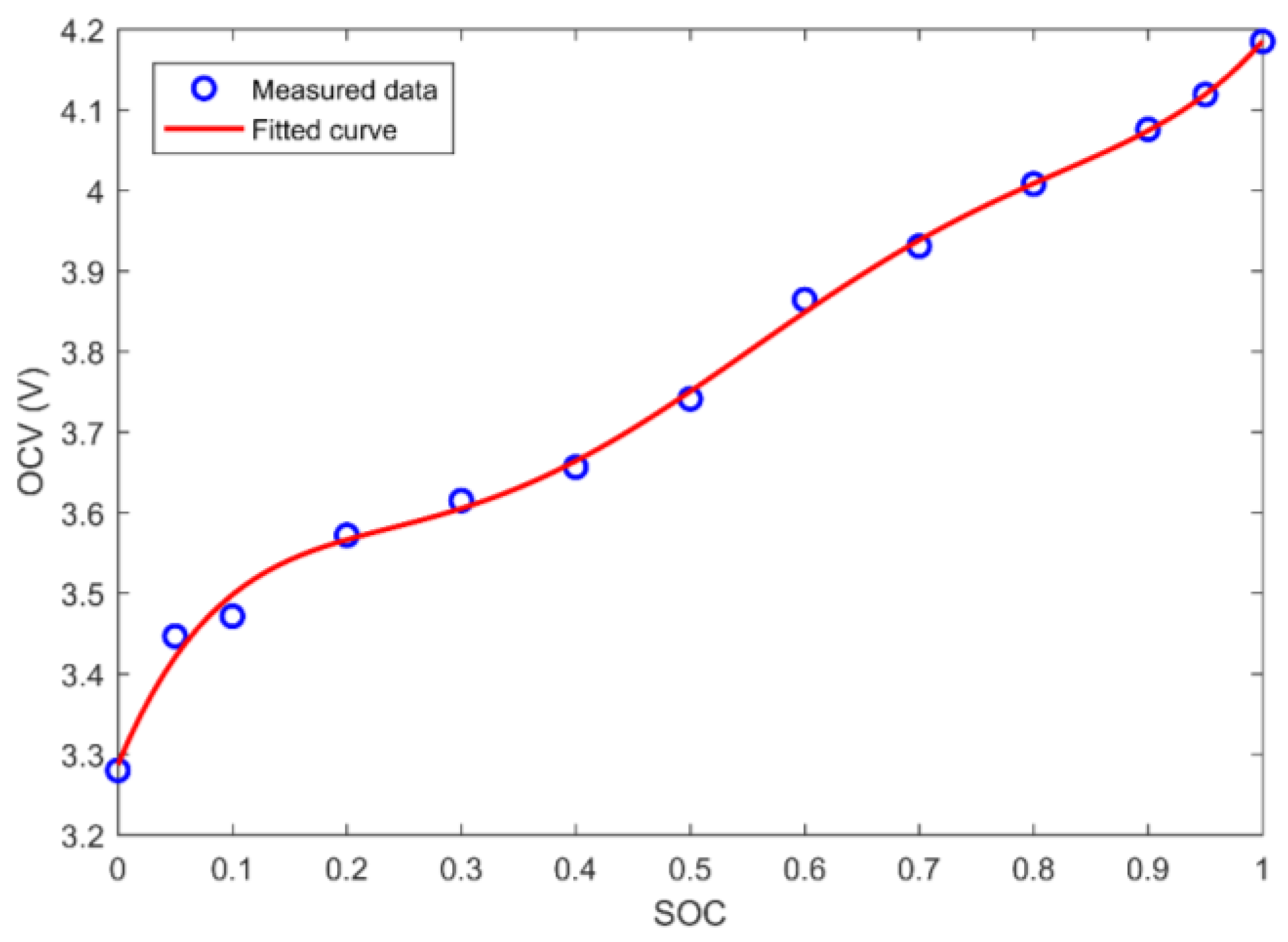
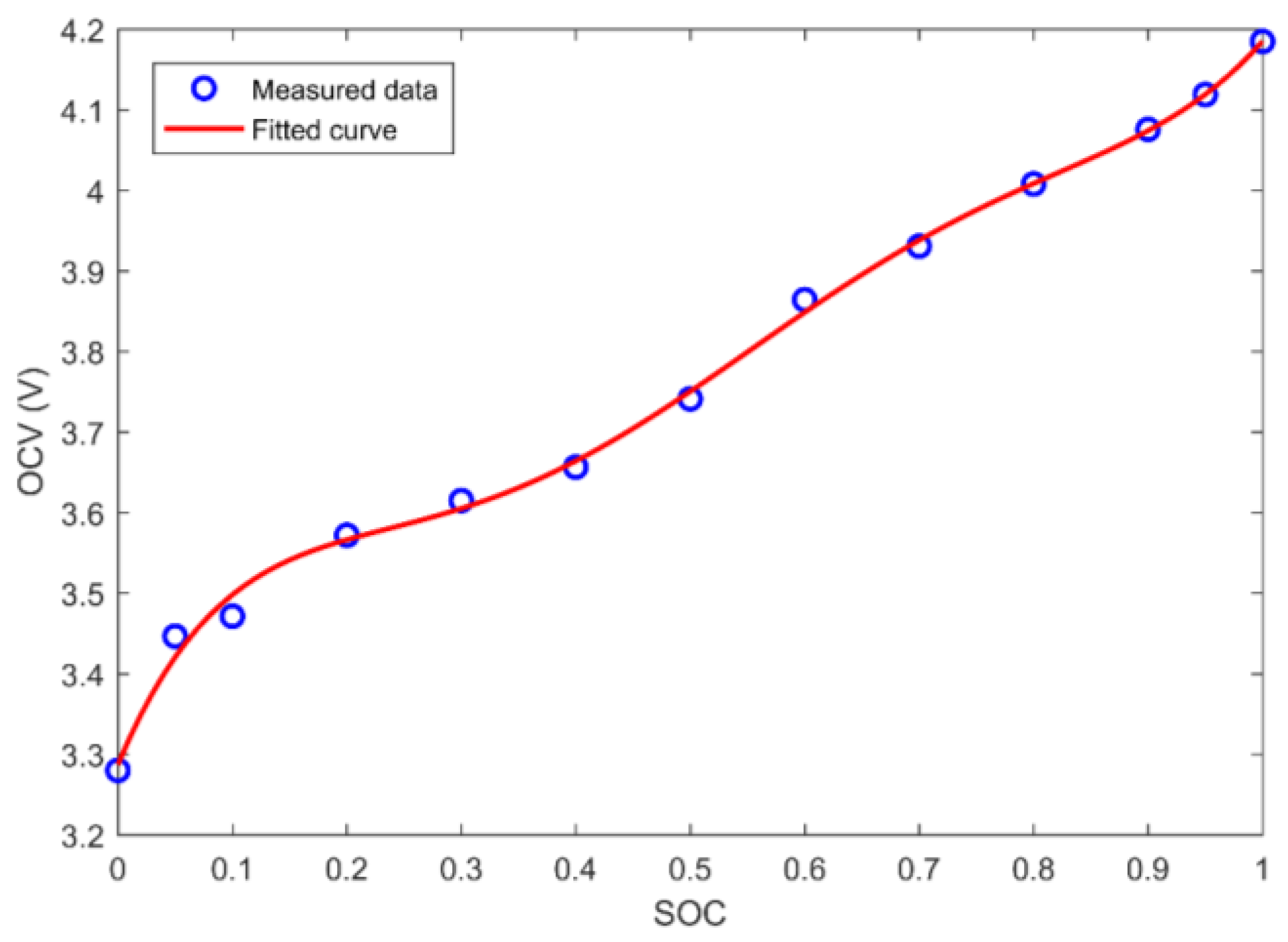
4.1. Capacity Test and OCV–SOC Curve Test of Lithium-Ion Battery
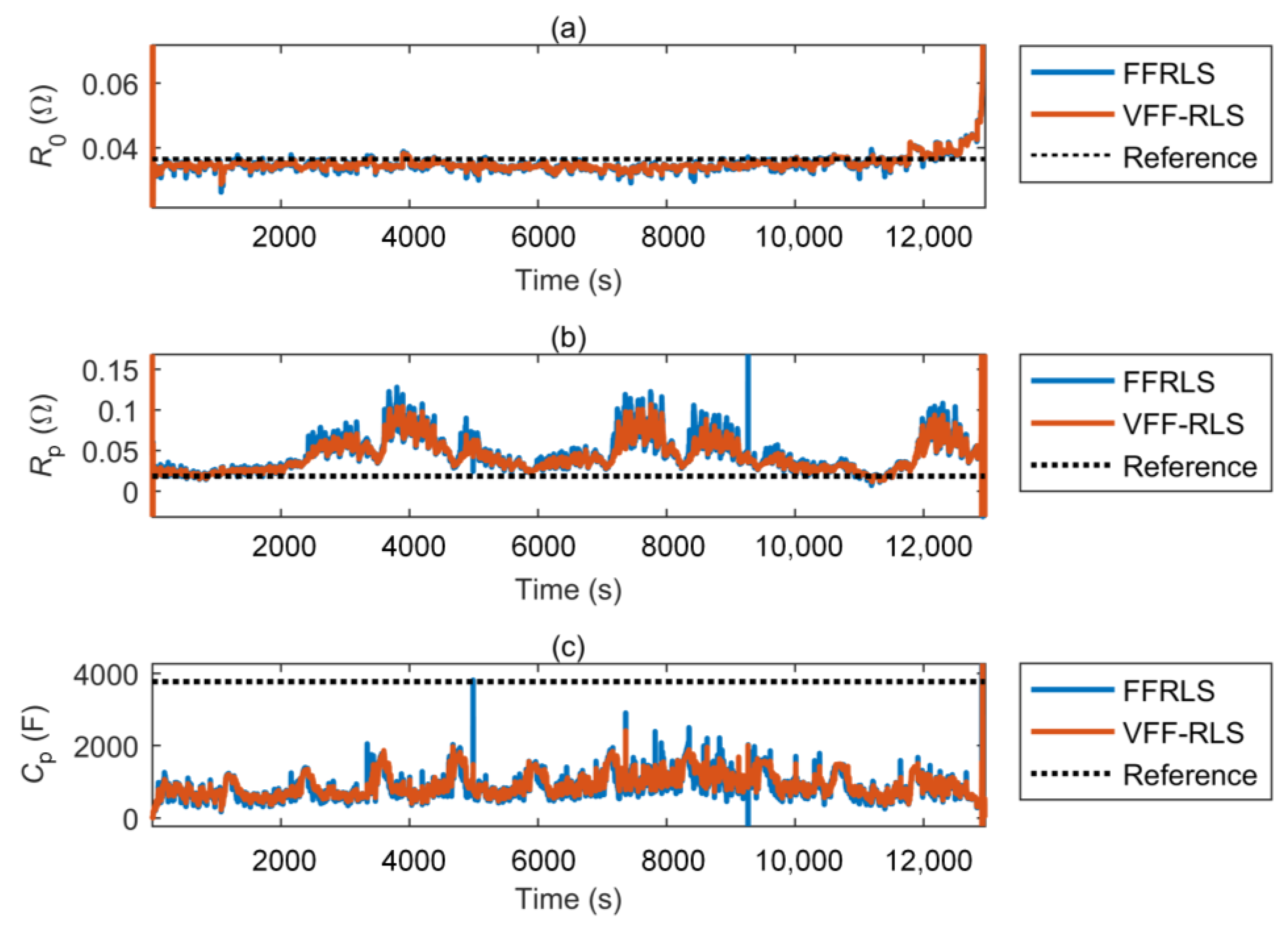
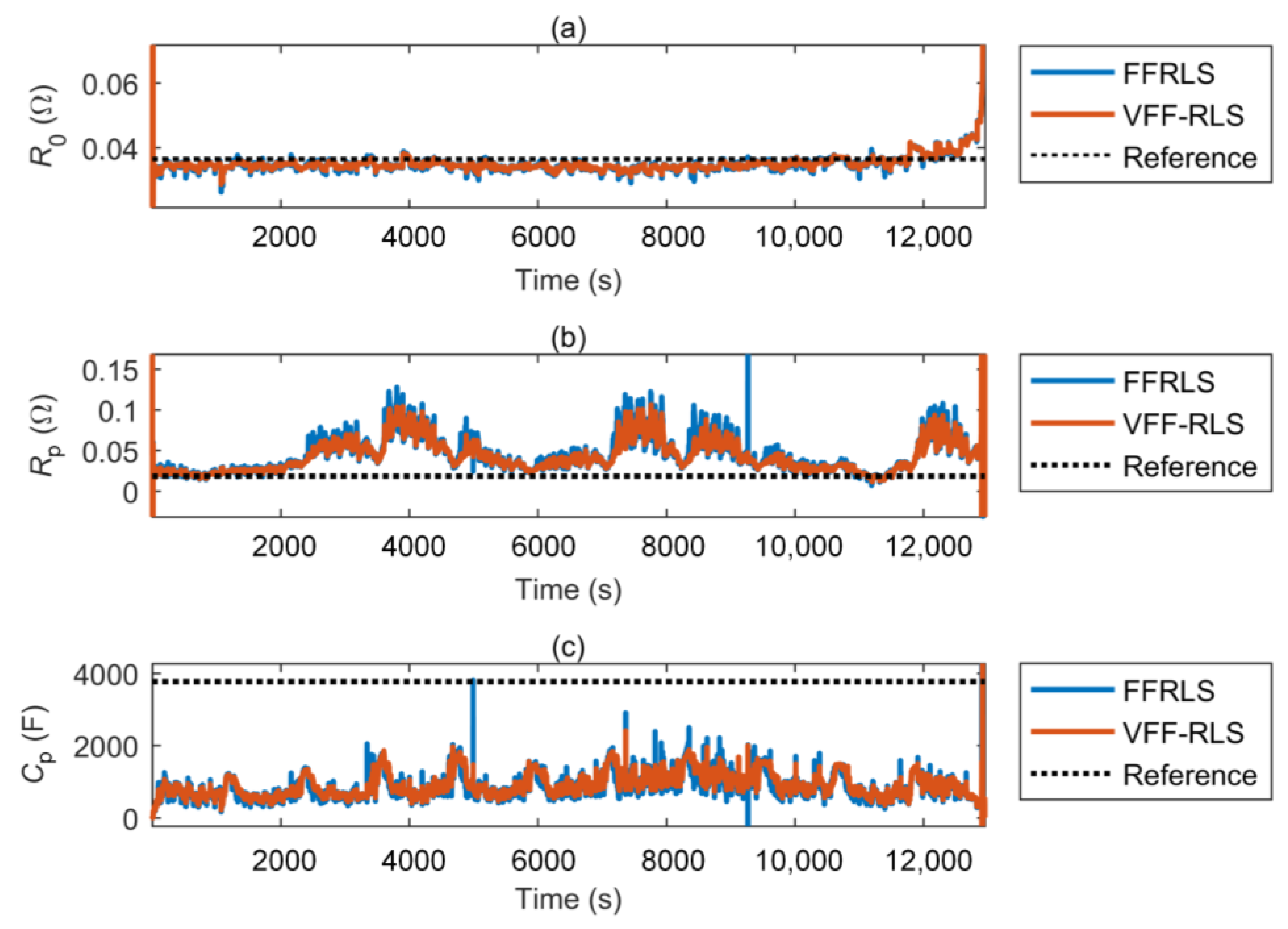
4.2. Results of Online Parameter Identification by FFRLS and VFF-RLS
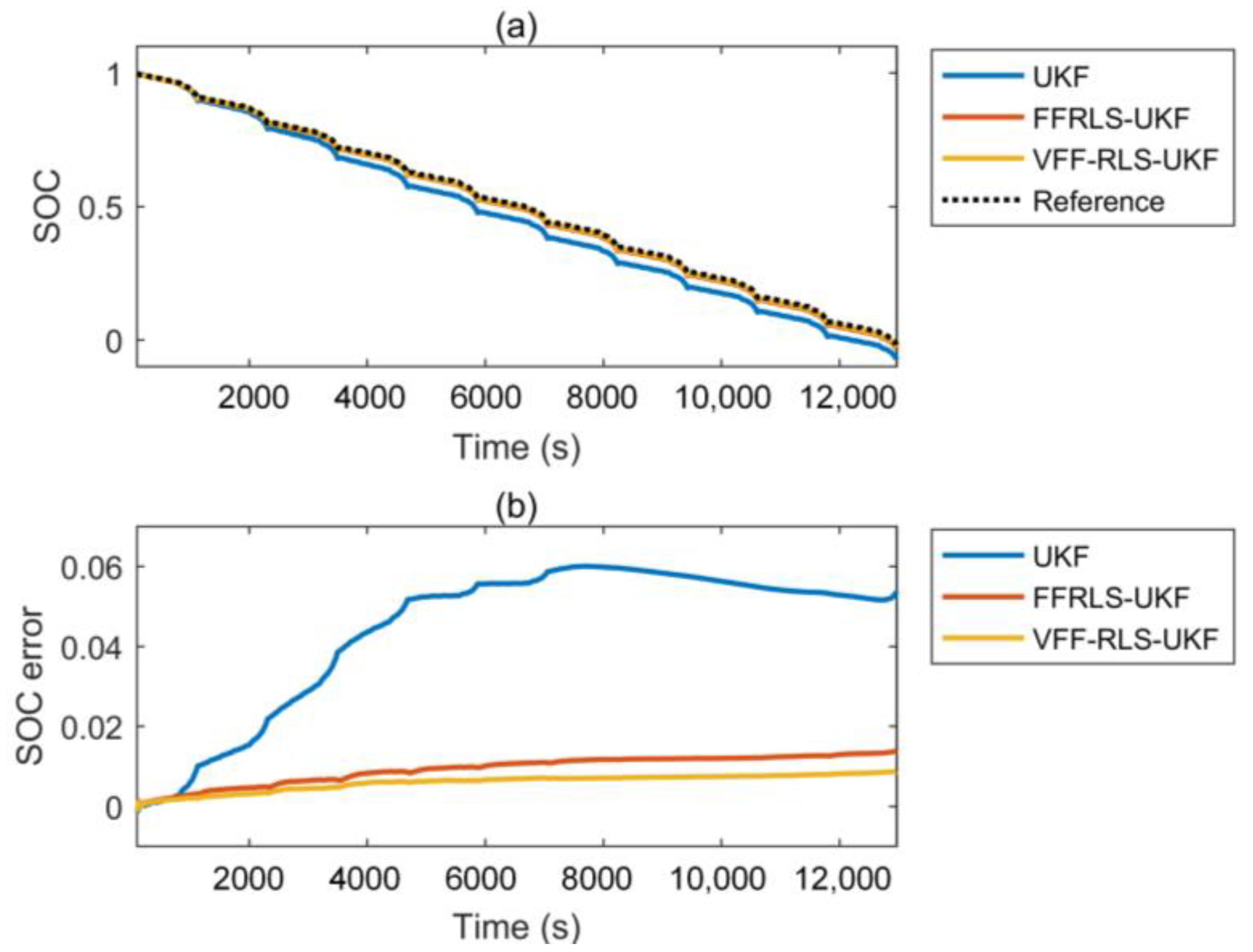
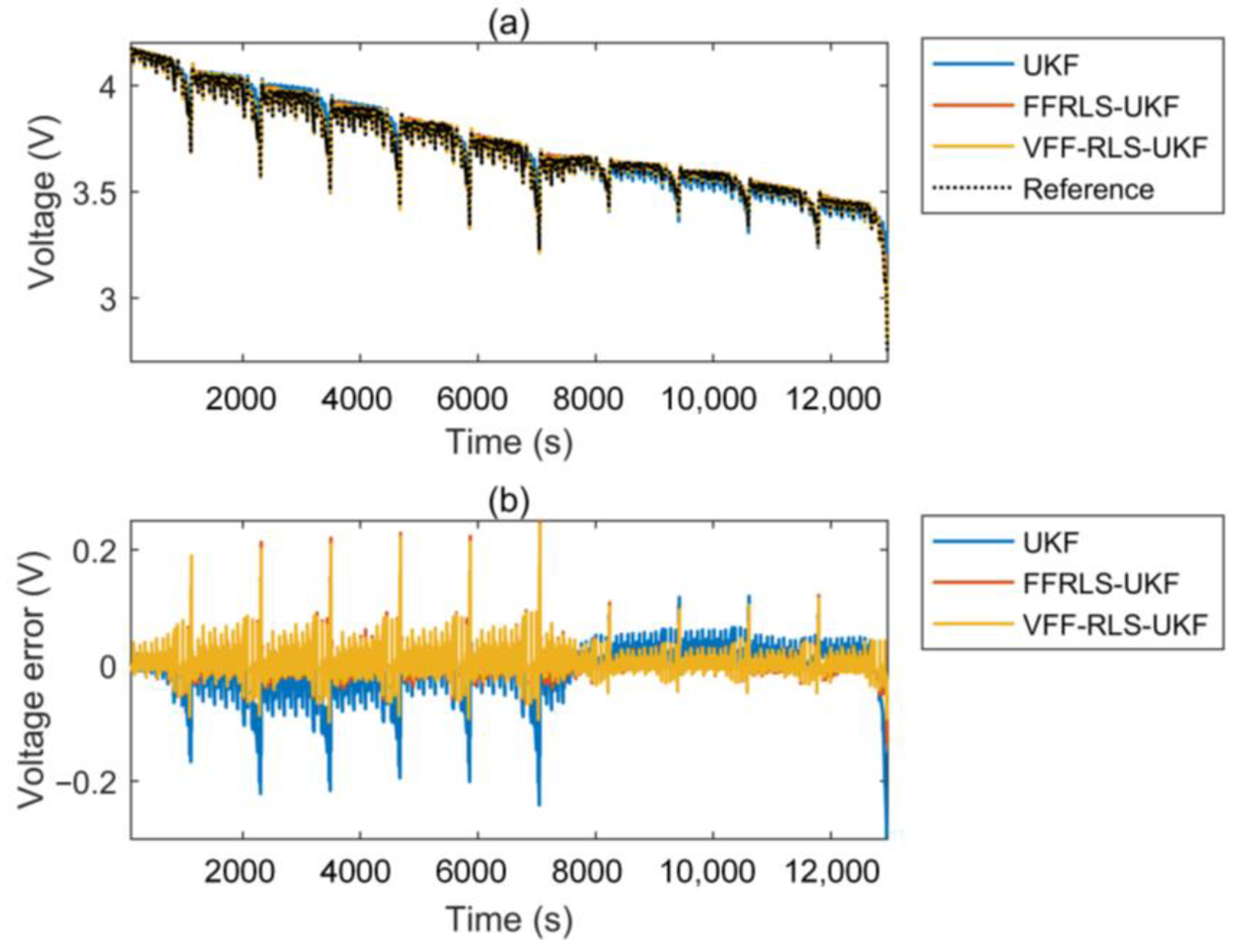
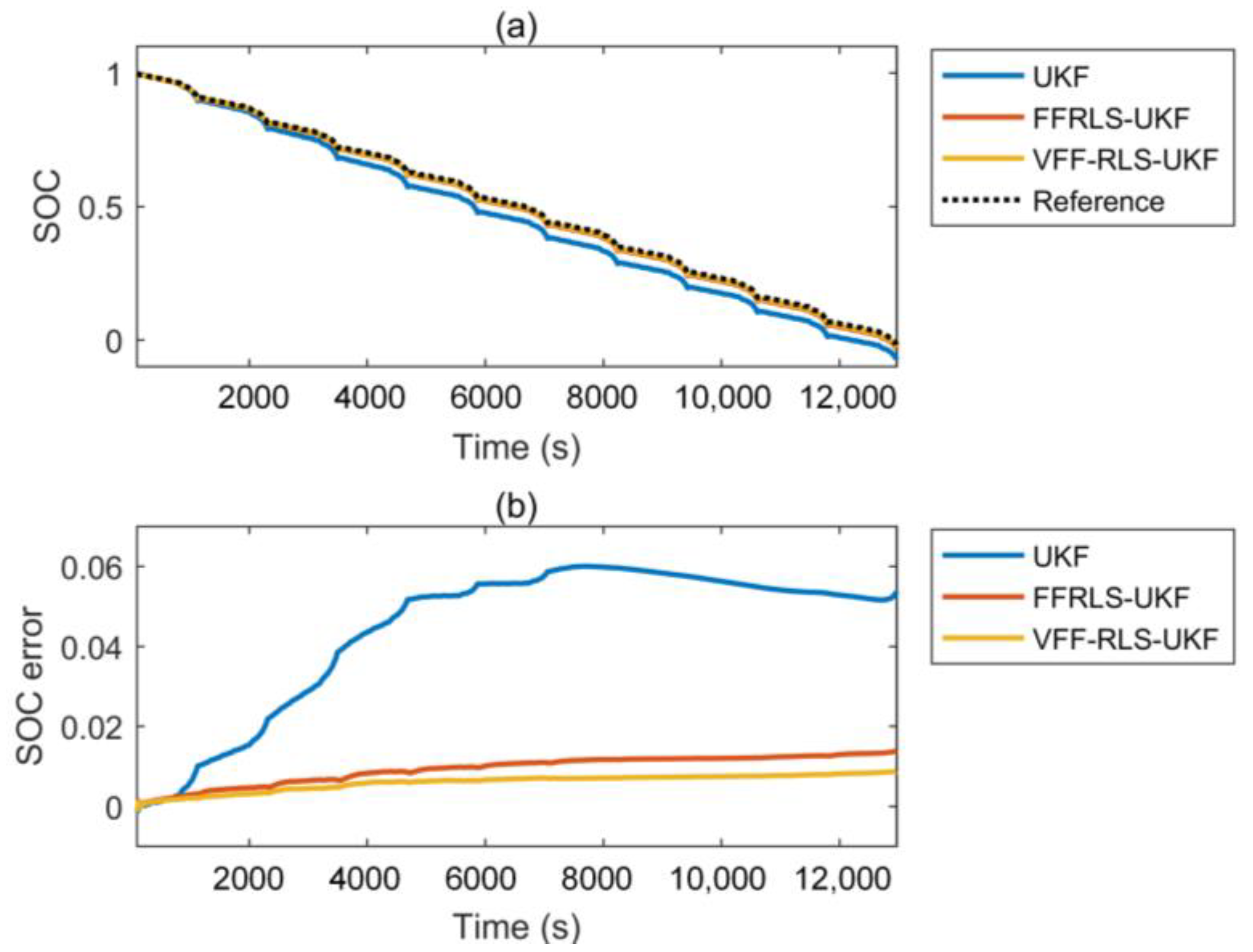
4.3. Results of SOC and Terminal Voltage Estimation by UKF, FFRLS-UKF, and VFF-RLS-UKF
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Acronyms
| BMS | Battery management system |
| FFRLS | Forgetting factor recursive least squares |
| GNL | General nonlinear |
| NEDC | New European Driving Cycle |
| OCV | Open-circuit voltage |
| PC | Personal computer |
| PF | Particle filtering |
| PNGV | Partnership for a New Generation of Vehicles |
| RLS | Recursive least squares |
| RMSE | Root-mean-square error |
| SMO | Sliding mode observer |
| SOC | State of charge |
| SOH | State of health |
| UKF | Unscented Kalman filter |
| VFF | Variable forgetting factor |
References
- Blomgren, G.E. The development and future of lithium ion batteries. J. Electrochem. Soc. 2016, 164, A5019–A5025. [Google Scholar] [CrossRef]
- Hoque, M.M.; Hannan, M.A.; Mohamed, A.; Ayob, A. Battery charge equalization controller in electric vehicle applications: A review. Renew. Sustain. Energy Rev. 2017, 75, 1363–1385. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, W.; Lei, G. A review of li-ion battery equivalent circuit models. Trans. Electr. Electron. Mater. 2016, 17, 311–316. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 1. Background. J. Power Sources 2004, 134, 252–261. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 2. Modeling and identification. J. Power Sources 2004, 134, 262–276. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- He, Z.; Gao, M.; Wang, C.; Wang, L.; Liu, Y. Adaptive state of charge estimation for li-ion batteries based on an unscented Kalman filter with an enhanced battery model. Energies 2013, 6, 4134–4151. [Google Scholar] [CrossRef]
- Sun, F.C.; Hu, X.S.; Zou, Y.; Li, S.G. Adaptive unscented Kalman filtering for state of charge estimation of a lithium-ion battery for electric vehicles. Energy 2011, 36, 3531–3540. [Google Scholar] [CrossRef]
- Xia, B.; Wang, H.; Tian, Y.; Wang, M.; Sun, W.; Xu, Z. State of charge estimation of lithium-ion batteries using an adaptive cubature Kalman filter. Energies 2015, 8, 5916–5936. [Google Scholar] [CrossRef]
- Xia, B.Z.; Sun, Z.; Zhang, R.F.; Lao, Z.Z. A cubature particle filter algorithm to estimate the state of the charge of lithium-ion batteries based on a second-order equivalent circuit model. Energies 2017, 10, 15. [Google Scholar] [CrossRef]
- Xia, B.; Sun, Z.; Zhang, R.; Cui, D.; Lao, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. A comparative study of three improved algorithms based on particle filter algorithms in soc estimation of lithium ion batteries. Energies 2017, 10, 1149. [Google Scholar] [CrossRef]
- Zhang, F.; Liu, G.; Fang, L. A battery state of charge estimation method using sliding mode observer. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 989–994. [Google Scholar]
- Kim, I.S. The novel state of charge estimation method for lithium battery using sliding mode observer. J. Power Sources 2006, 163, 584–590. [Google Scholar] [CrossRef]
- Yan, J.; Xu, G.; Xu, Y.; Xie, B. Battery state-of-charge estimation based on H∞ filter for hybrid electric vehicle. In Proceedings of the 10th International Conference on Control, Automation, Robotics and Vision, Hanoi, Vietnam, 17–20 December 2008; pp. 464–469. [Google Scholar]
- Zhang, F.; Liu, G.; Fang, L.; Wang, H. Estimation of battery state of charge with H∞ observer: Applied to a robot for inspecting power transmission lines. IEEE Trans. Ind. Electron. 2012, 59, 1086–1095. [Google Scholar] [CrossRef]
- Xia, B.; Zheng, W.; Zhang, R.; Lao, Z.; Sun, Z. A novel observer for lithium-ion battery state of charge estimation in electric vehicles based on a second-order equivalent circuit model. Energies 2017, 10, 1150. [Google Scholar] [CrossRef]
- Cuma, M.U.; Koroglu, T. A comprehensive review on estimation strategies used in hybrid and battery electric vehicles. Renew. Sustain. Energy Rev. 2015, 42, 517–531. [Google Scholar] [CrossRef]
- Xu, J.; Cao, B.; Cao, J.; Zou, Z. A comparison study of the model based soc estimation methods for lithium-ion batteries. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–5. [Google Scholar]
- Guo, X.; Kang, L.; Yao, Y.; Huang, Z.; Li, W. Joint estimation of the electric vehicle power battery state of charge based on the least squares method and the Kalman filter algorithm. Energies 2016, 9, 100. [Google Scholar] [CrossRef]
- Duong, V.-H.; Bastawrous, H.A.; Lim, K.; See, K.W.; Zhang, P.; Dou, S.X. Online state of charge and model parameters estimation of the LiFePO4 battery in electric vehicles using multiple adaptive forgetting factors recursive least-squares. J. Power Sources 2015, 296, 215–224. [Google Scholar] [CrossRef]
- Li, Y.; Wang, C.; Gong, J. A combination Kalman filter approach for state of charge estimation of lithium-ion battery considering model uncertainty. Energy 2016, 109, 933–946. [Google Scholar] [CrossRef]
- Chaoui, H.; Gualous, H. Online parameter and state estimation of lithium-ion batteries under temperature effects. Electr. Power Syst. Res. 2017, 145, 73–82. [Google Scholar] [CrossRef]
- Liu, C.Z.; Liu, W.Q.; Wang, L.Y.; Hu, G.D.; Ma, L.P.; Ren, B.Y. A new method of modeling and state of charge estimation of the battery. J. Power Sources 2016, 320, 1–12. [Google Scholar] [CrossRef]
- Feng, T.; Yang, L.; Zhao, X.; Zhang, H.; Qiang, J. Online identification of lithium-ion battery parameters based on an improved equivalent-circuit model and its implementation on battery state-of-power prediction. J. Power Sources 2015, 281, 192–203. [Google Scholar] [CrossRef]
- Wei, Z.; Lim, T.M.; Skyllas-Kazacos, M.; Wai, N.; Tseng, K.J. Online state of charge and model parameter co-estimation based on a novel multi-timescale estimator for vanadium redox flow battery. Appl. Energy 2016, 172, 169–179. [Google Scholar] [CrossRef]
- Xia, B.; Lao, Z.; Zhang, R.; Tian, Y.; Chen, G.; Sun, Z.; Wang, W.; Sun, W.; Lai, Y.; Wang, M.; et al. Online parameter identification and state of charge estimation of lithium-ion batteries based on forgetting factor recursive least squares and nonlinear Kalman filter. Energies 2017, 11, 3. [Google Scholar] [CrossRef]
- Song, S.W.; Lim, J.S.; Baek, S.J.; Sung, K.M. Gauss newton variable forgetting factor recursive least squares for time varying parameter tracking. Electron. Lett. 2000, 36, 988–990. [Google Scholar] [CrossRef]
- Shu-Hung, L.; So, C.F. Gradient-based variable forgetting factor RLS algorithm in time-varying environments. IEEE Trans. Signal Process. 2005, 53, 3141–3150. [Google Scholar] [CrossRef]
- Paleologu, C.; Benesty, J.; Ciochina, S. A robust variable forgetting factor recursive least-squares algorithm for system identification. IEEE Signal Process. Lett. 2008, 15, 597–600. [Google Scholar] [CrossRef]
- Lu, L.; Zhao, H.; Chen, B. Improved-variable-forgetting-factor recursive algorithm based on the logarithmic cost for volterra system identification. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 588–592. [Google Scholar] [CrossRef]
- Chu, Y.J.; Mak, C.M. A variable forgetting factor diffusion recursive least squares algorithm for distributed estimation. Signal Process. 2017, 140, 219–225. [Google Scholar] [CrossRef]
- Chen, H.; Liu, H.J.; Li, D.L.; Dai, J. Time-varying parameters measurement by least square method with variable forgetting factors. High Volt. Eng. 2008, 34, 7. [Google Scholar]
- Li, Q.; Wang, Y.; Zhang, X. Analysis and simulation of a variable forgetting factor RLS algorithm. Mod. Electron. Tech. 2008, 17. [Google Scholar] [CrossRef]
- Haykin, S. Adaptive Filter Theory, 4th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Lee, S.S.; Kim, T.H.; Hu, S.J.; Cai, W.W.; Abell, J.A. Joining technologies for automotive lithium-ion battery manufacturing: A review. In Proceedings of the ASME 2010 International Manufacturing Science and Engineering Conference, Erie, PA, USA, 12–15 October 2010; pp. 541–549. [Google Scholar]
- Schweighofer, B.; Raab, K.M.; Brasseur, G. Modeling of high power automotive batteries by the use of an automated test system. IEEE Trans. Instrum. Measur. 2003, 52, 1087–1091. [Google Scholar] [CrossRef]
- Johnson, V.H. Battery performance models in advisor. J. Power Sources 2002, 110, 321–329. [Google Scholar] [CrossRef]
- Johnson, V.H.; Pesaran, A.A.; Sack, T. Temperature-Dependent Battery Models for High-Power Lithium-Ion Batteries. In Proceedings of the 17th Annual Electric Vehicle Symposium, Montreal, QC, Canada, 16–18 October 2000. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | UKF 1 | FFRLS-UKF 2 | VFF-RLS-UKF 3 |
|---|---|---|---|
| Mean error | 0.04398 | 0.00926 | 0.00595 |
| Max error | 0.06001 | 0.01391 | 0.00871 |
| RMSE 4 | 0.04767 | 0.00989 | 0.00630 |
| Method | UKF | FFRLS-UKF | VFF-RLS-UKF |
|---|---|---|---|
| Mean error | 0.02696 | 0.00843 | 0.00687 |
| Max error | 0.45917 | 0.24947 | 0.24345 |
| RMSE | 0.04112 | 0.01393 | 0.01224 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lao, Z.; Xia, B.; Wang, W.; Sun, W.; Lai, Y.; Wang, M. A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares. Energies 2018, 11, 1358. https://doi.org/10.3390/en11061358
Lao Z, Xia B, Wang W, Sun W, Lai Y, Wang M. A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares. Energies. 2018; 11(6):1358. https://doi.org/10.3390/en11061358
Chicago/Turabian StyleLao, Zizhou, Bizhong Xia, Wei Wang, Wei Sun, Yongzhi Lai, and Mingwang Wang. 2018. "A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares" Energies 11, no. 6: 1358. https://doi.org/10.3390/en11061358
APA StyleLao, Z., Xia, B., Wang, W., Sun, W., Lai, Y., & Wang, M. (2018). A Novel Method for Lithium-Ion Battery Online Parameter Identification Based on Variable Forgetting Factor Recursive Least Squares. Energies, 11(6), 1358. https://doi.org/10.3390/en11061358