Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation


Abstract
:1. Introduction
2. Constant Speed Control System and Experimental Test Rig
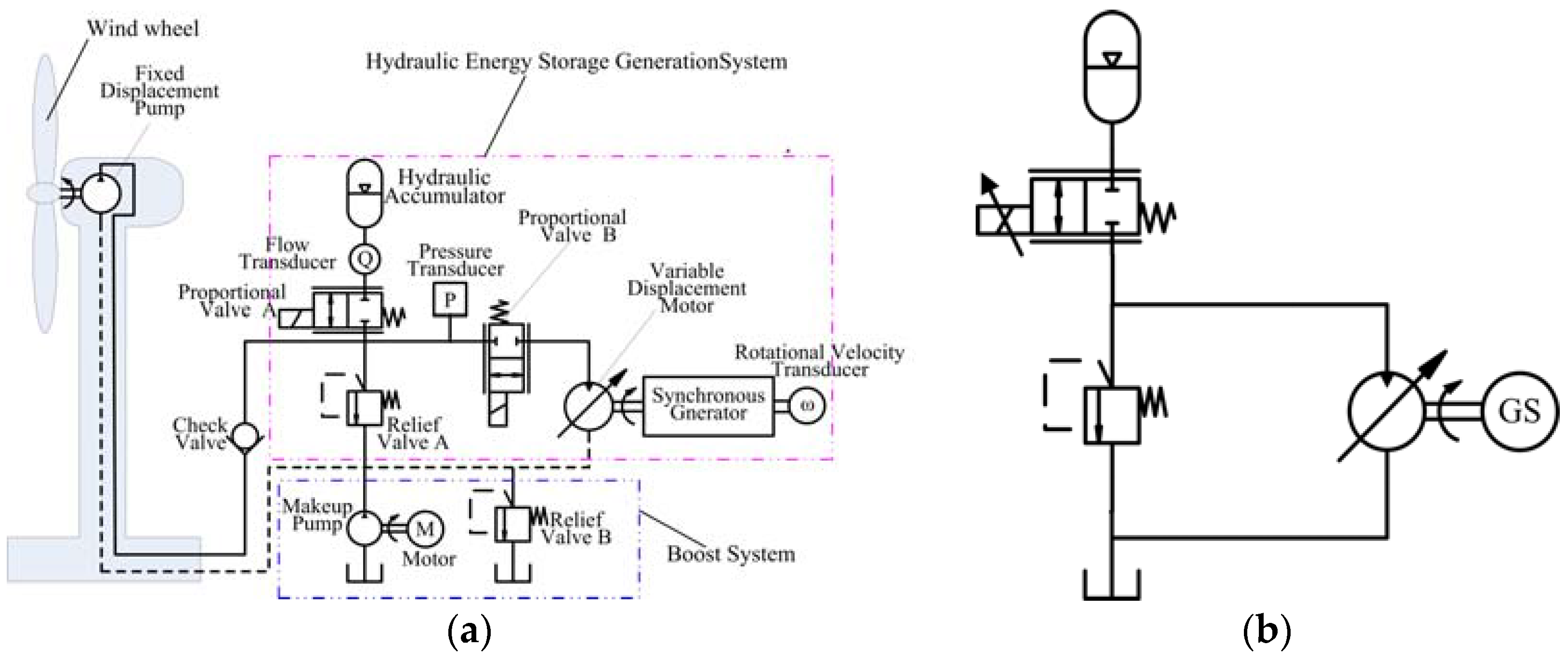
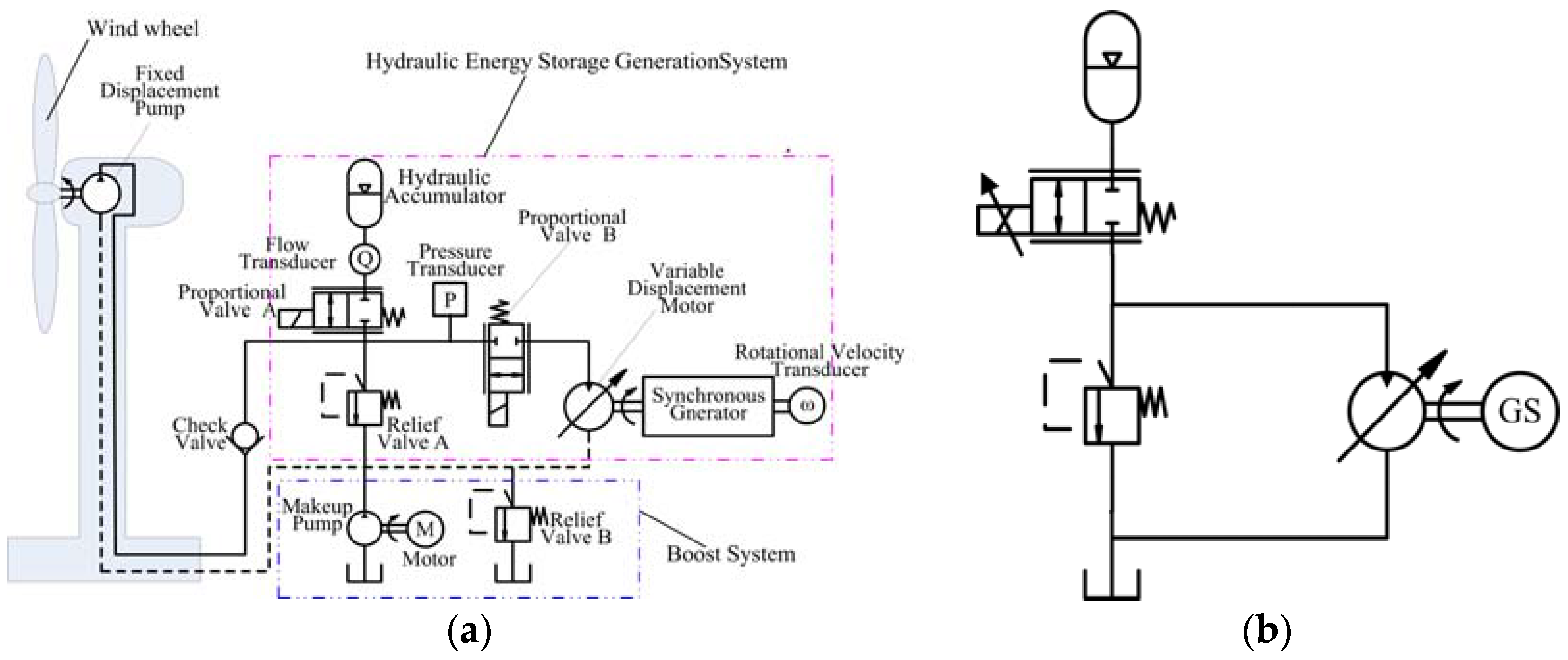
2.1. System Overview
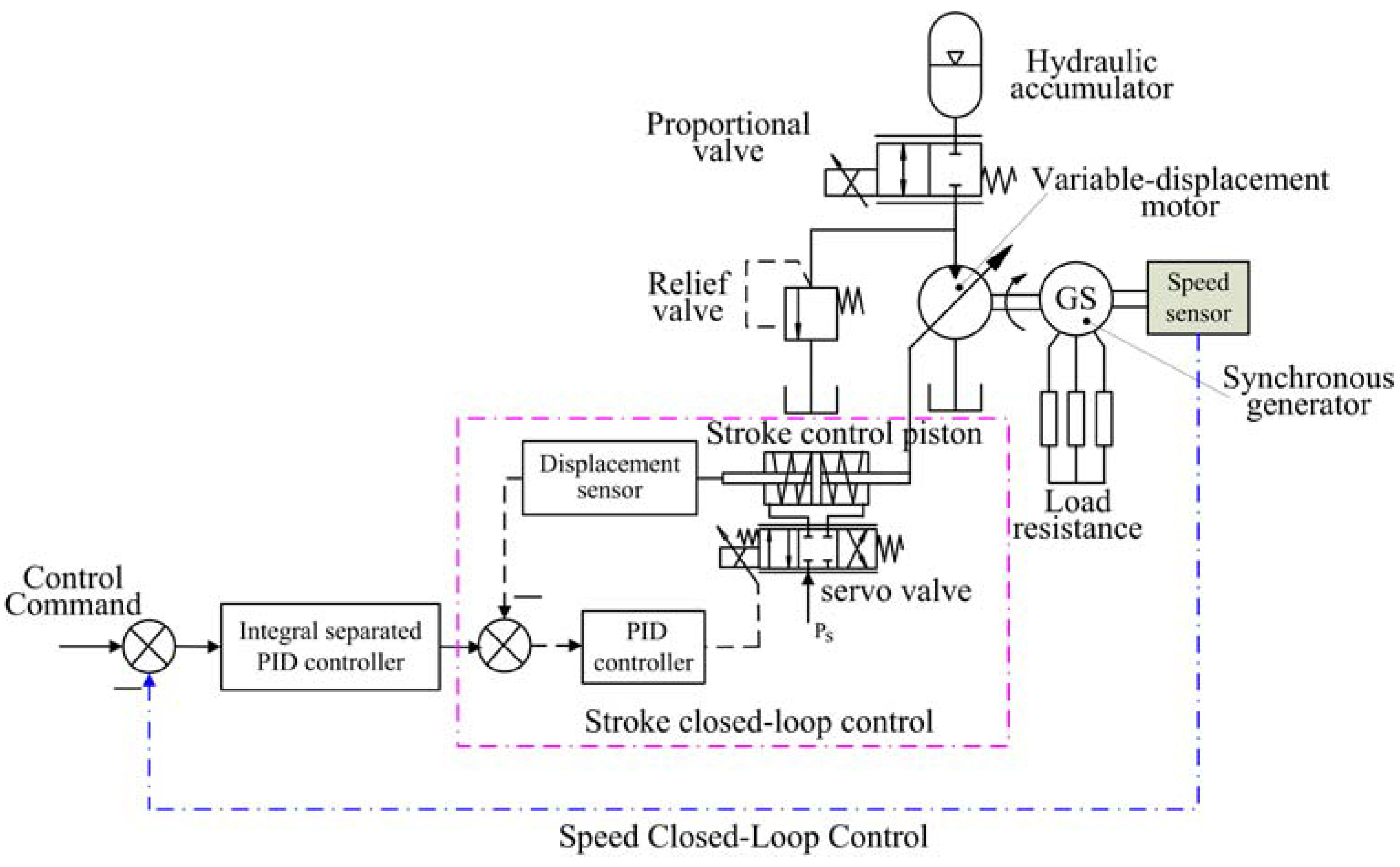
2.2. Control Scheme
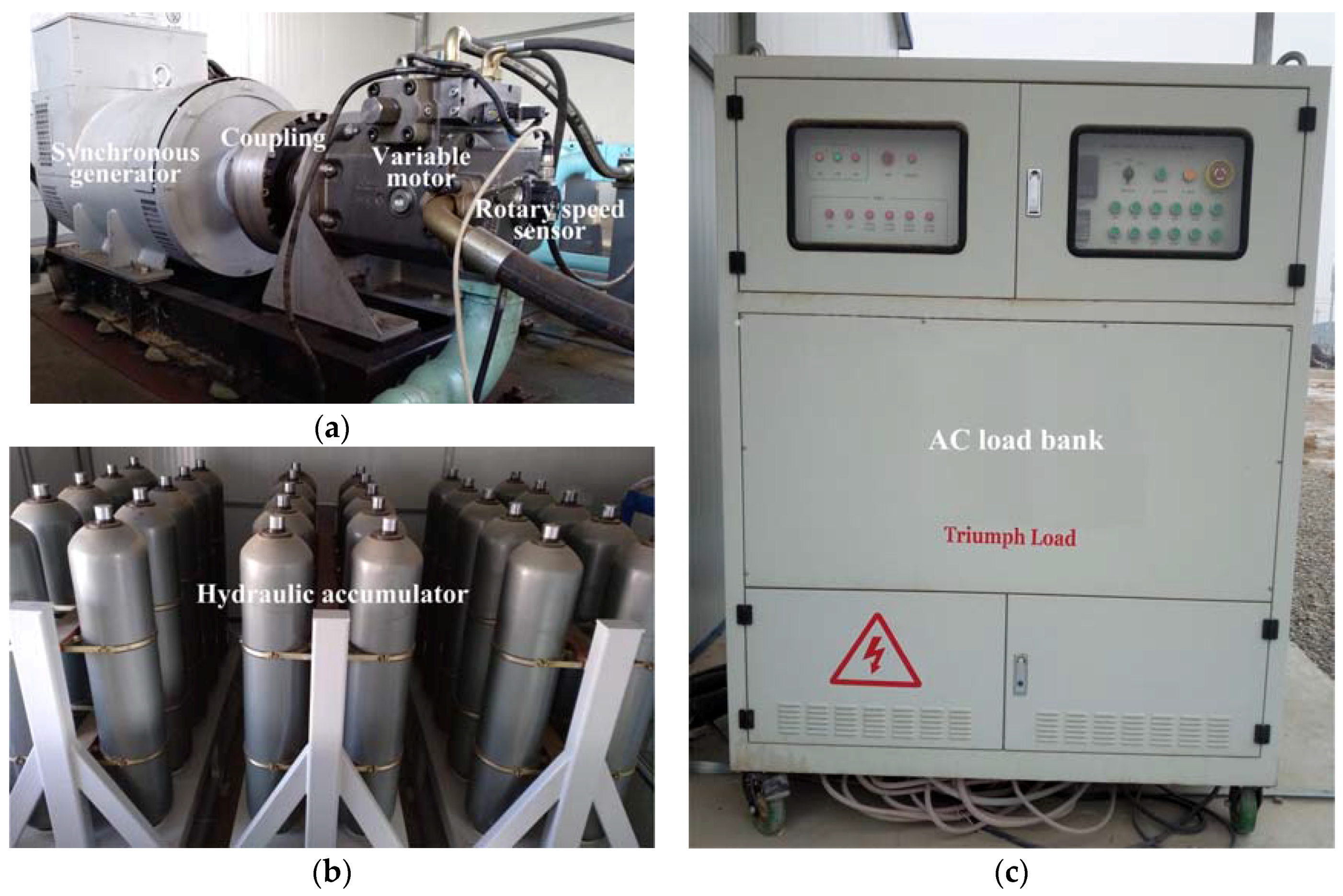
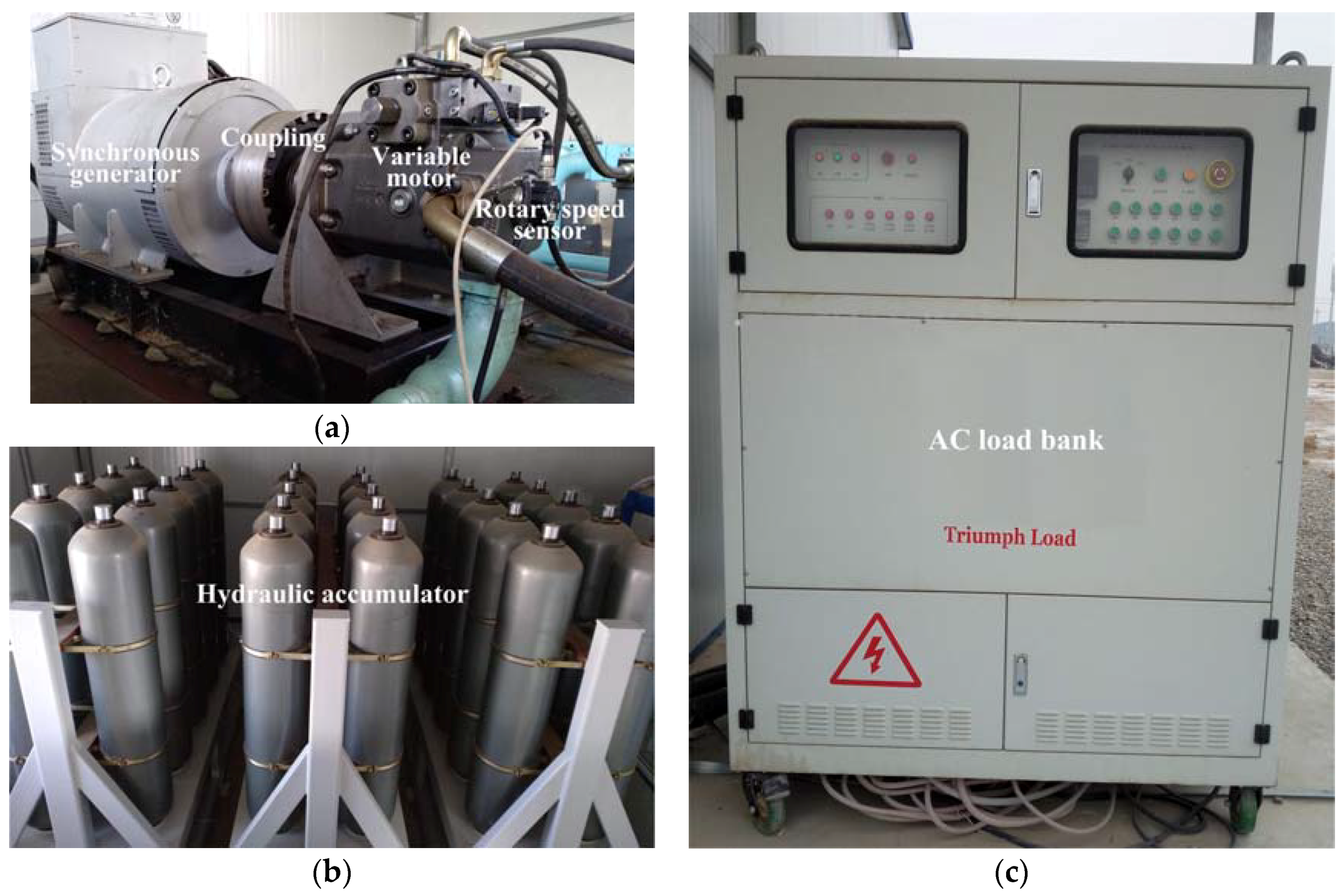
2.3. Experimental Test Rig
3. Mathematical Model
- (1)
- The pressure loss in the pipeline and the dynamic characteristic of the pipeline are neglected for short pipeline length.
- (2)
- Internal and external leakages of the variable motor are laminar flow, which are proportional to the differential pressure. The pressure of the variable motor housing is zero.
- (3)
- Bulk modulus and density of the hydraulic oil are constant.
- (4)
- The dynamic of the relief valve is considered negligible.
3.1. Hydraulic Accumulator
3.2. Proportional Valve
3.3. Relief Valve
3.4. Variable Motor
3.5. Synchronous Generator
3.6. Speed Sensor
3.7. Load Bank
4. Simulation and Experiment Study
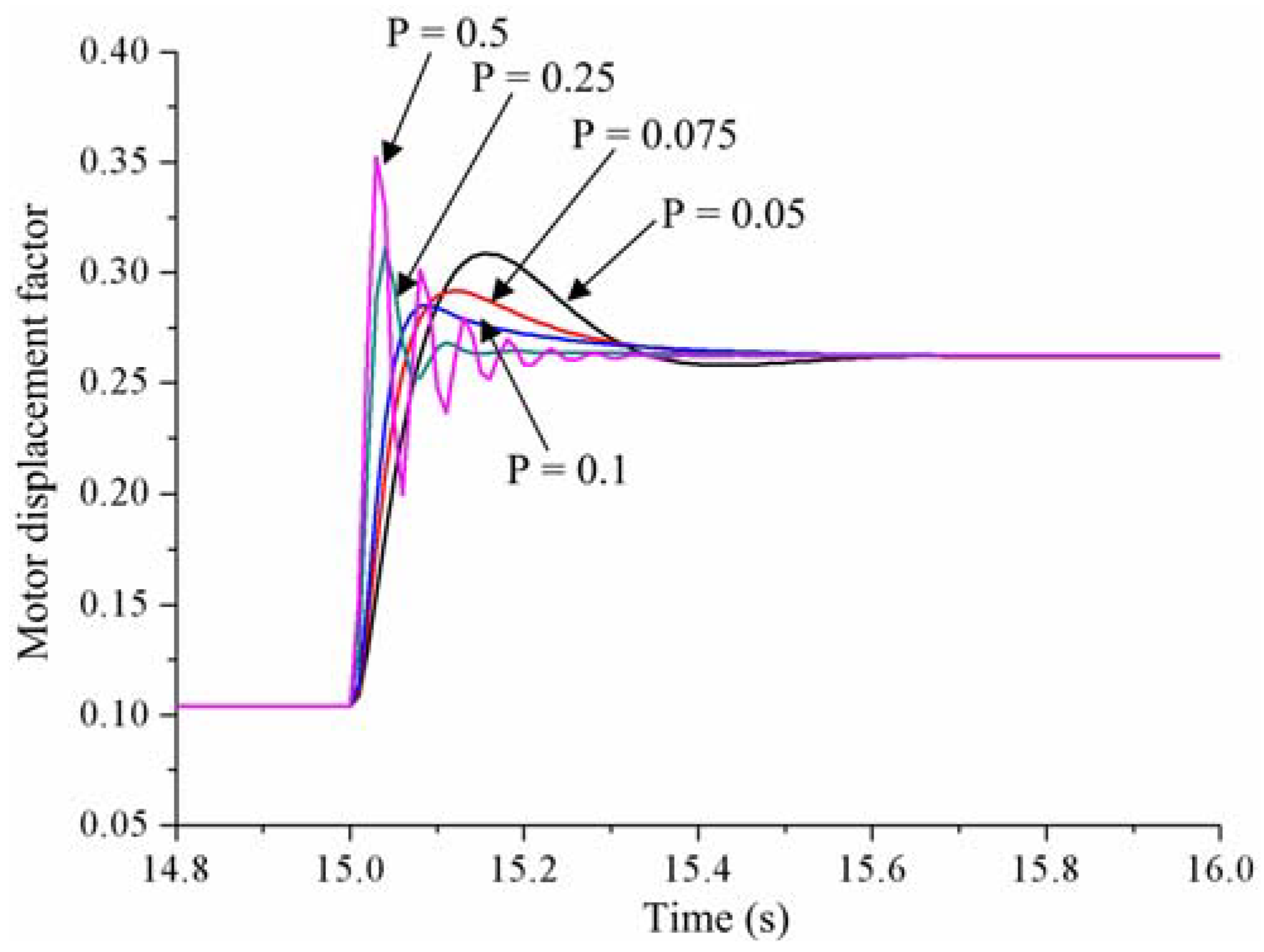
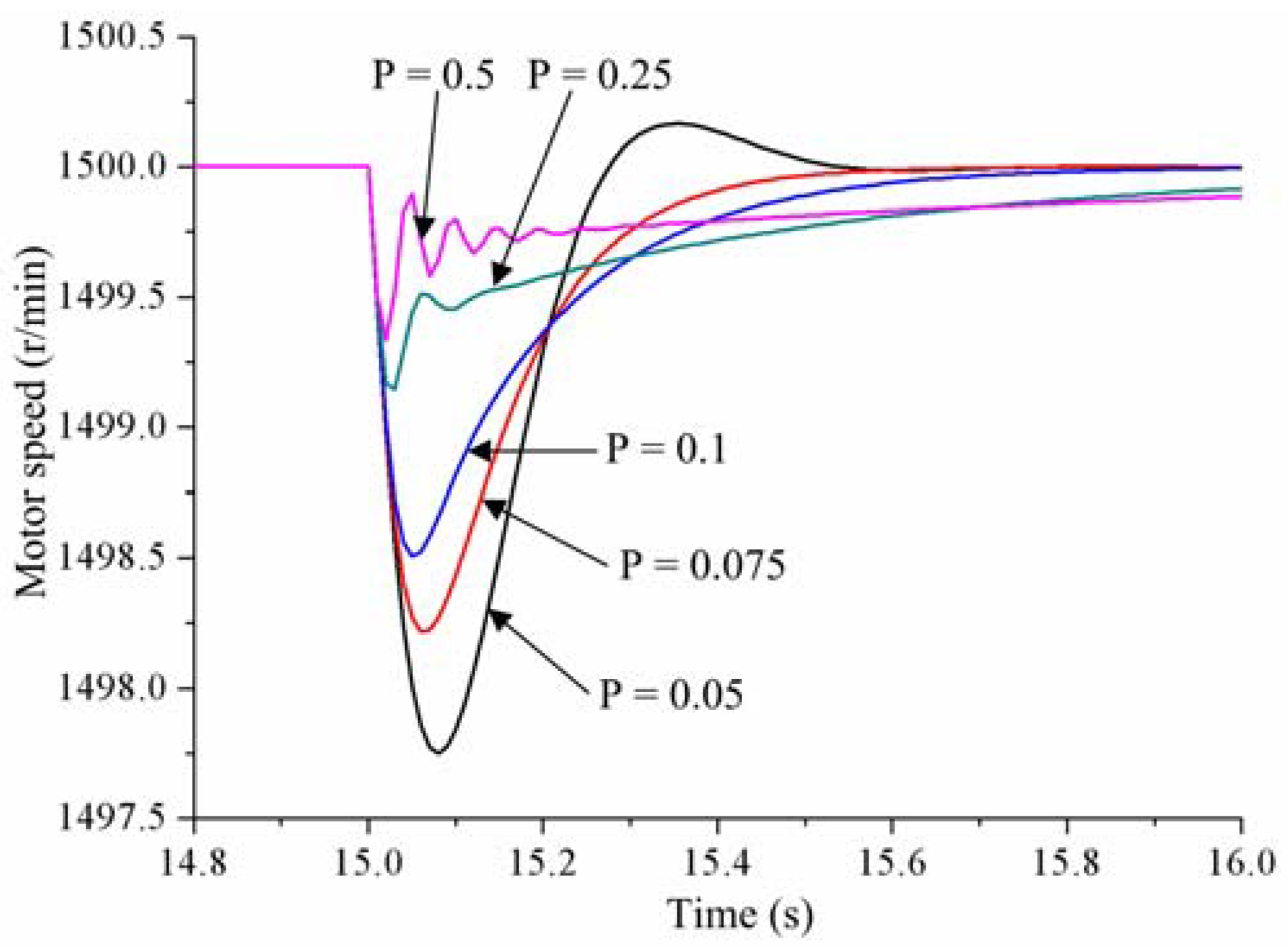
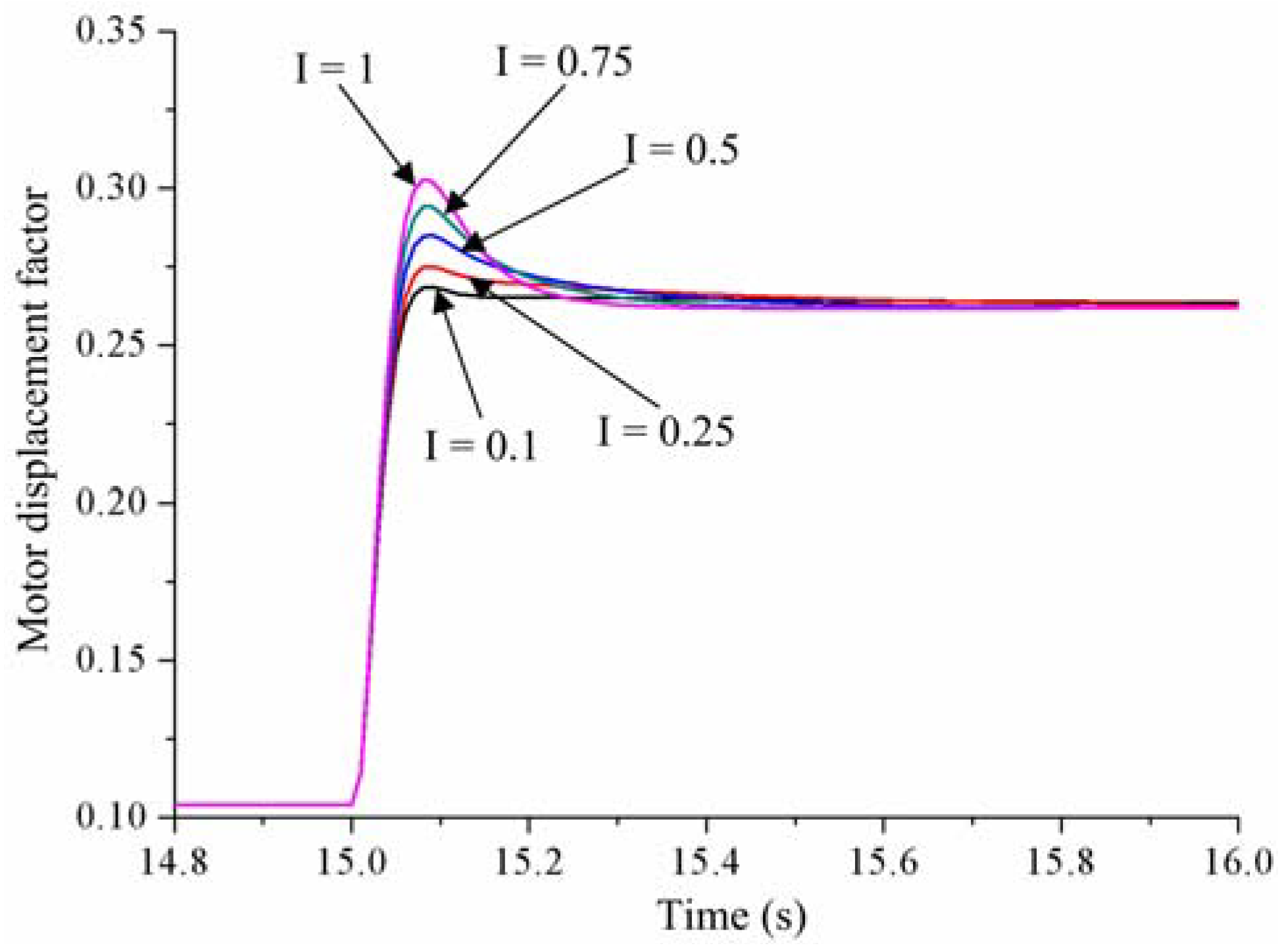
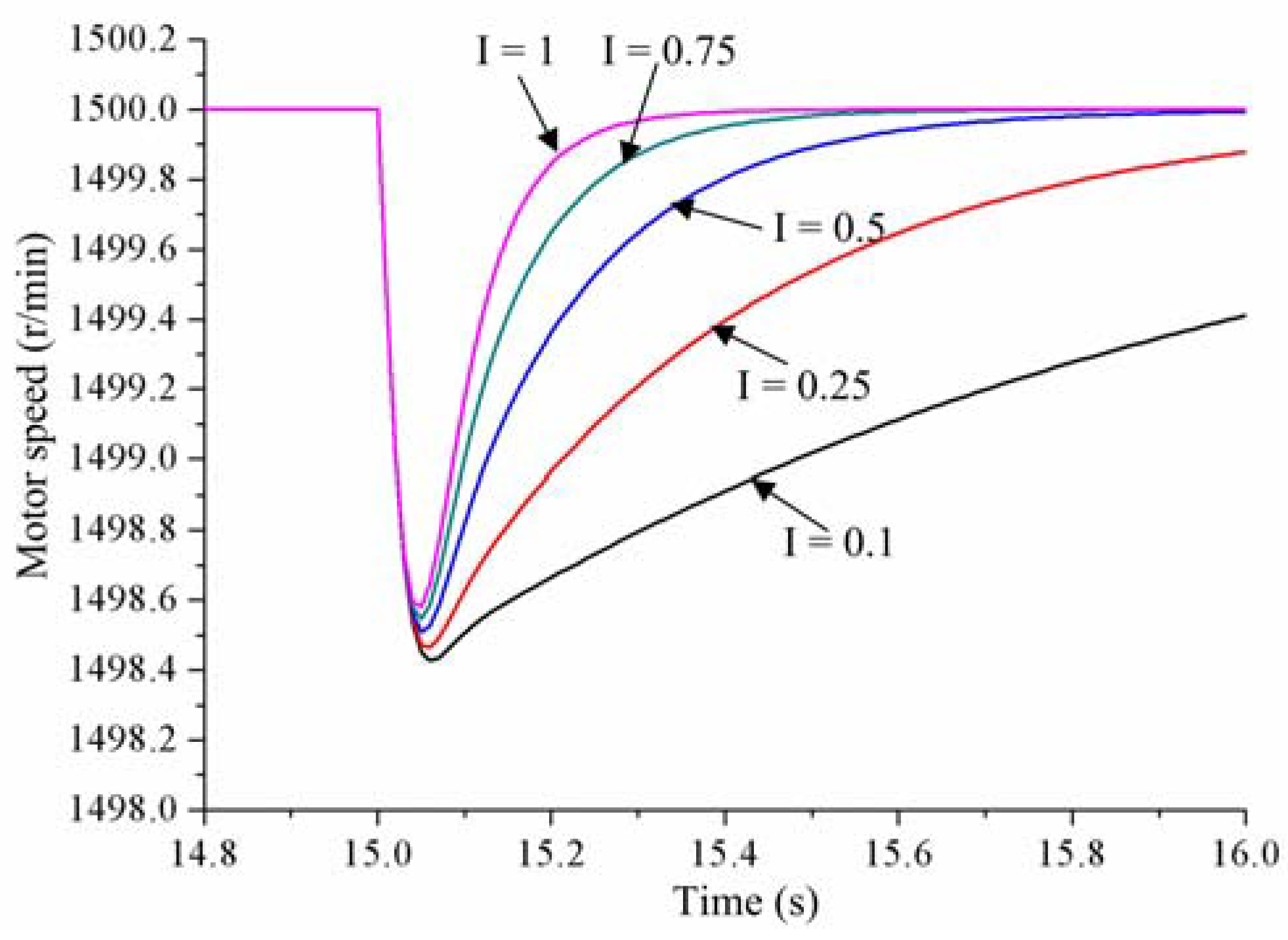
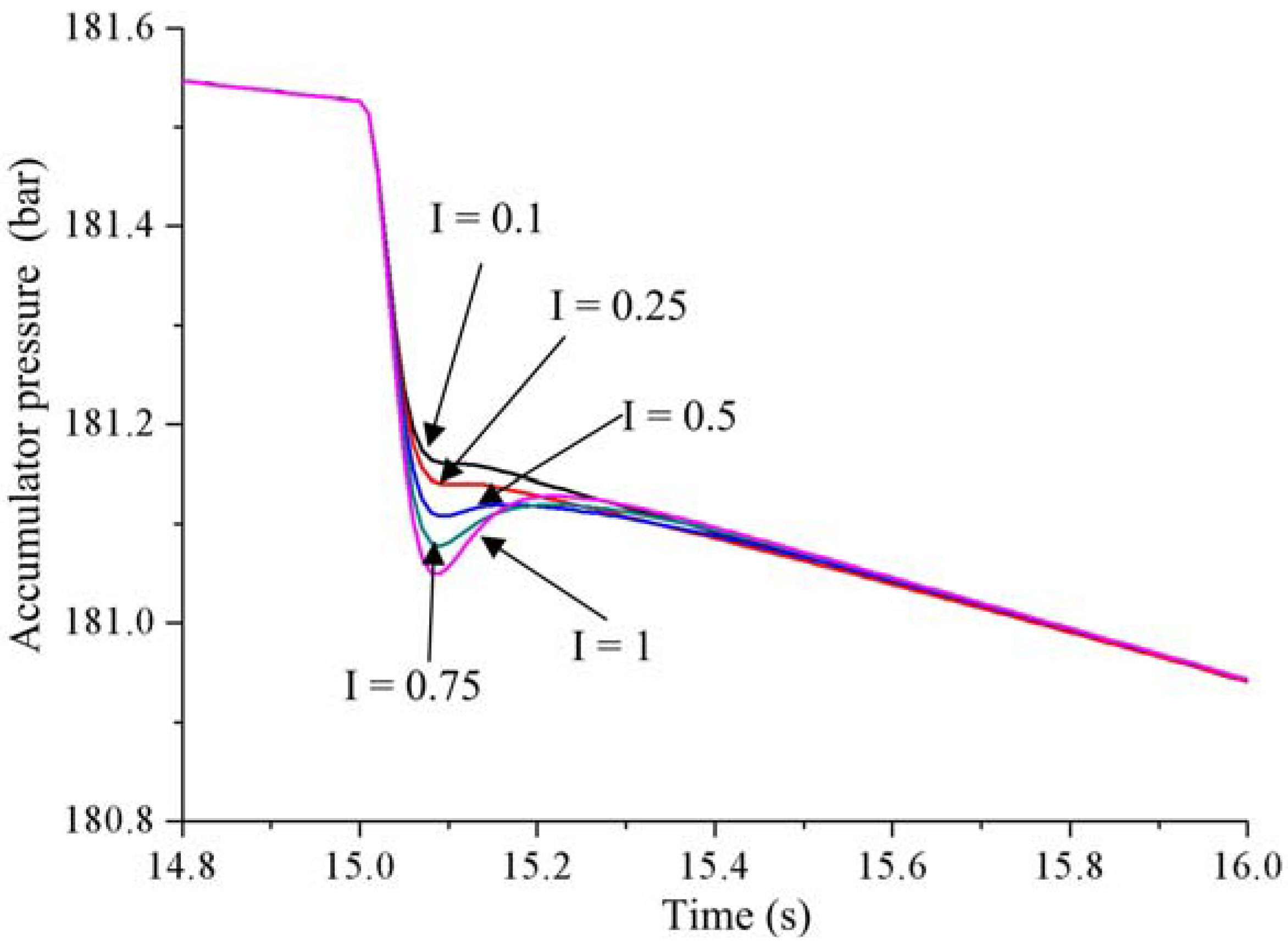
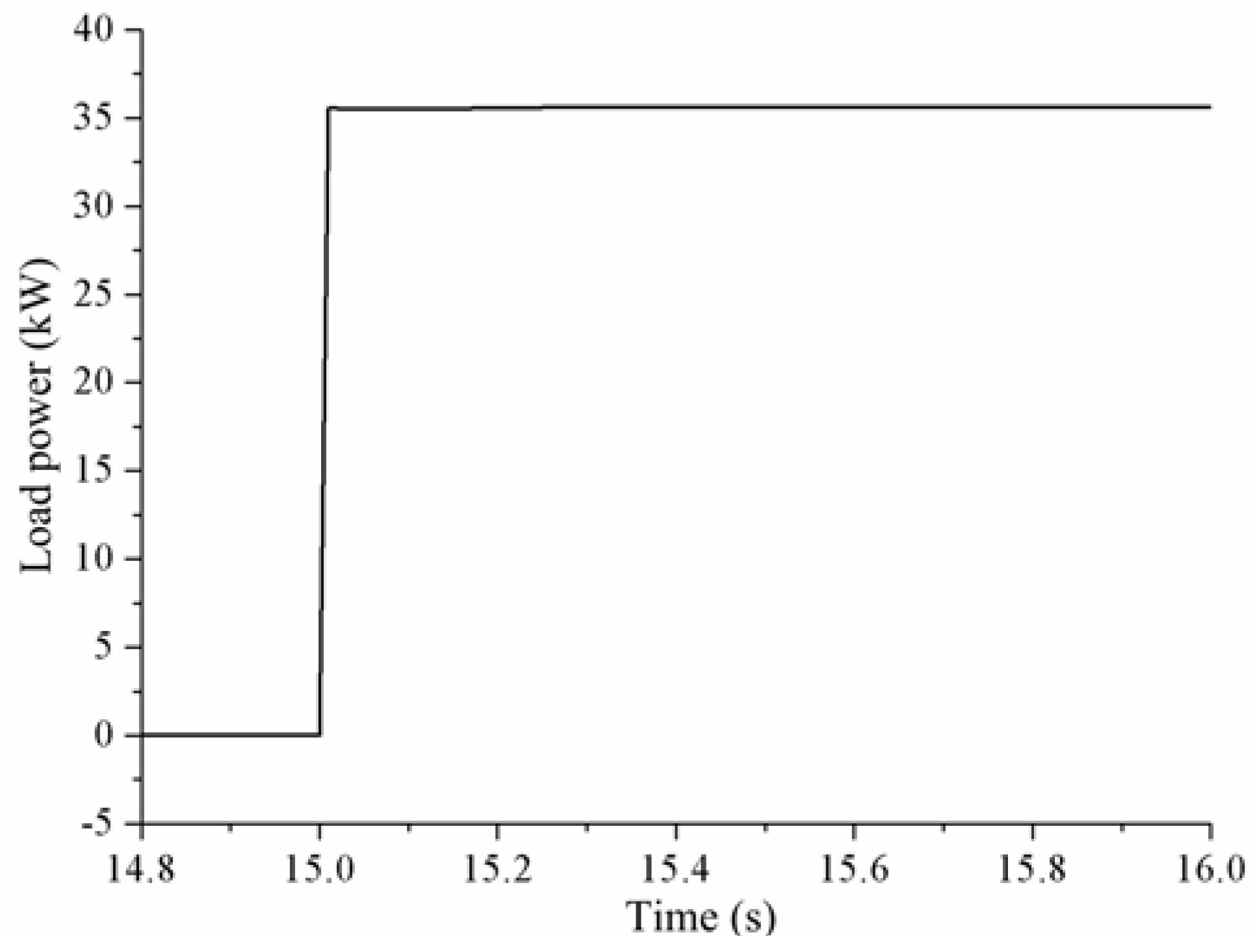
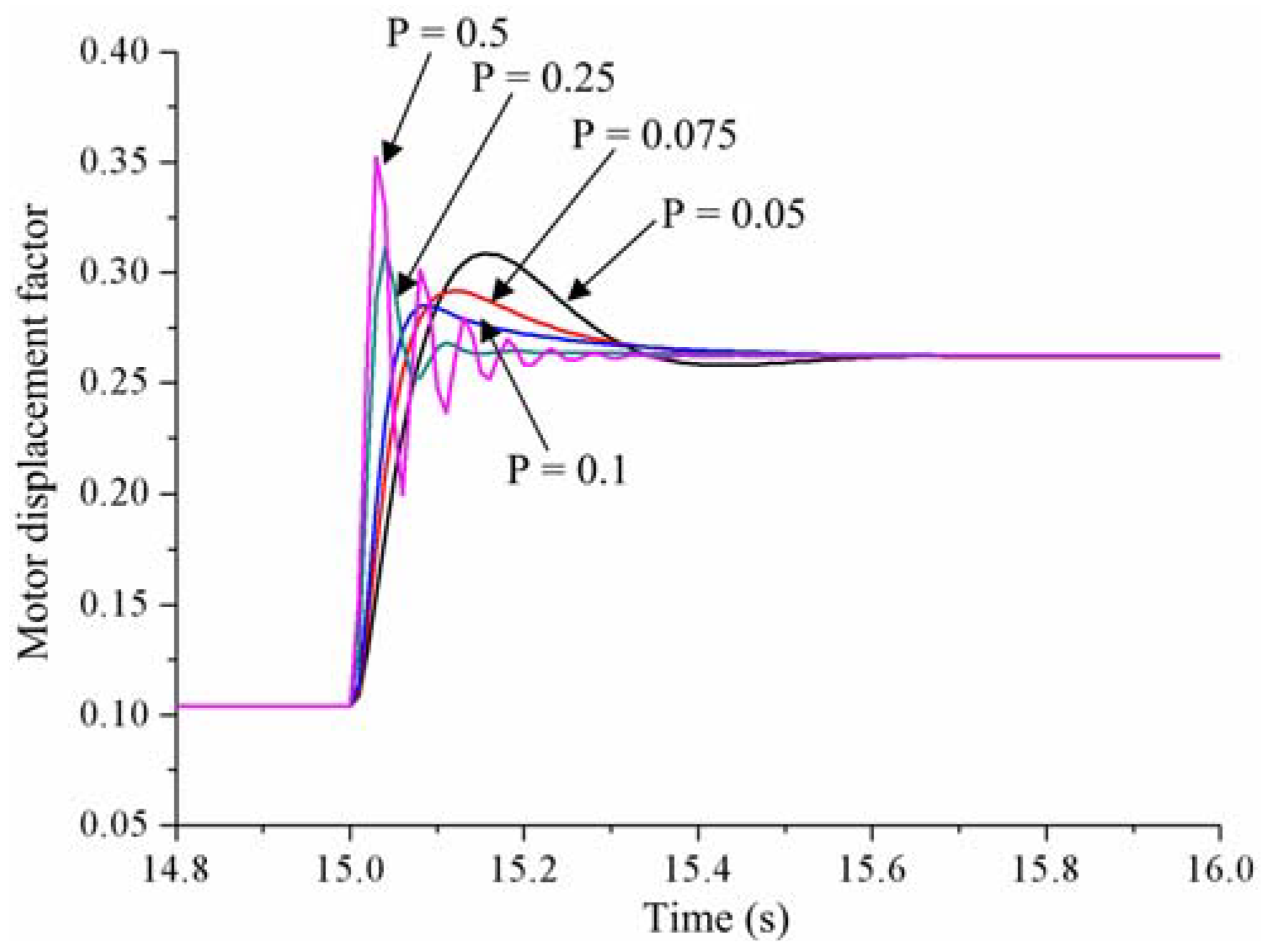
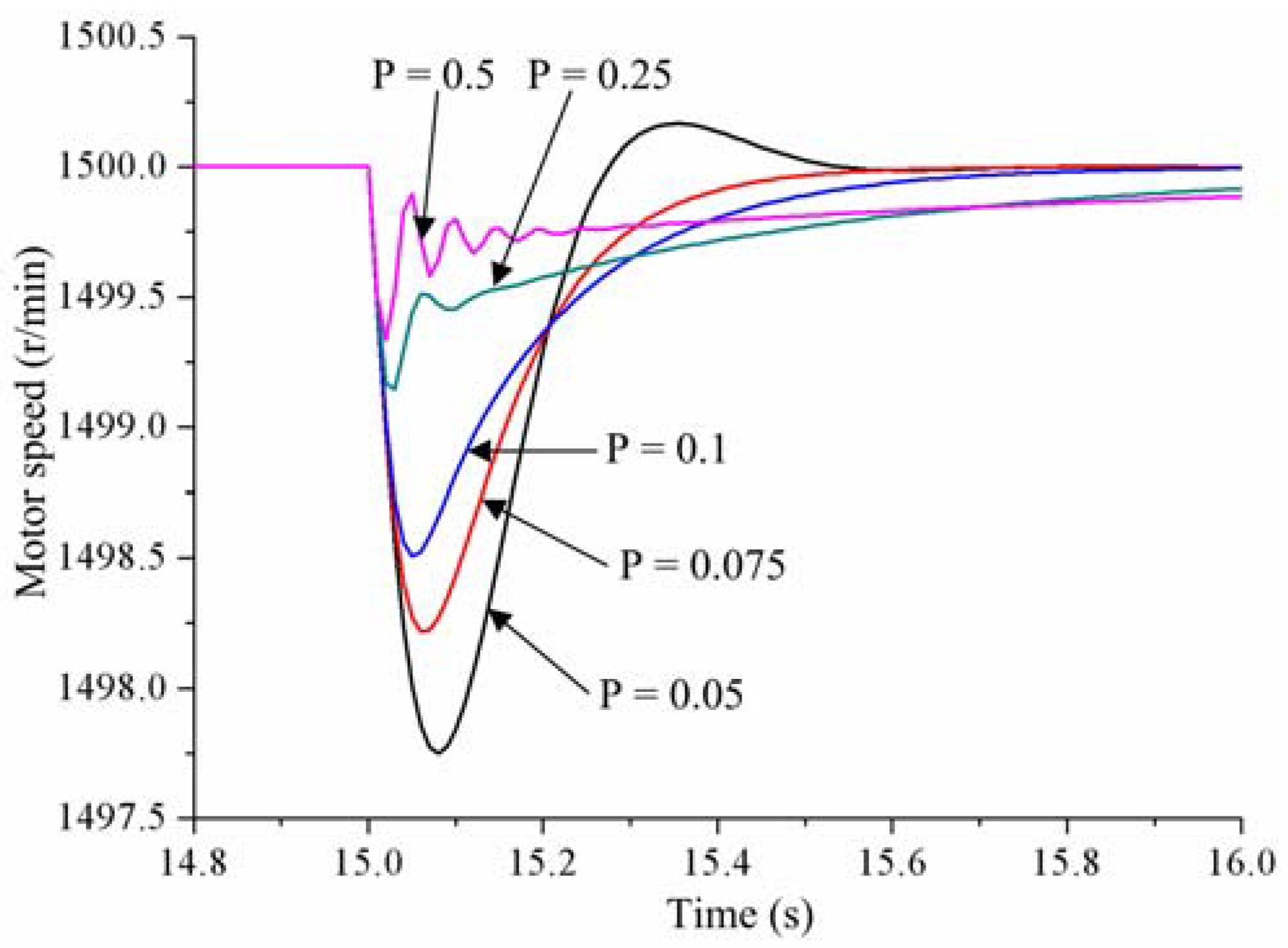
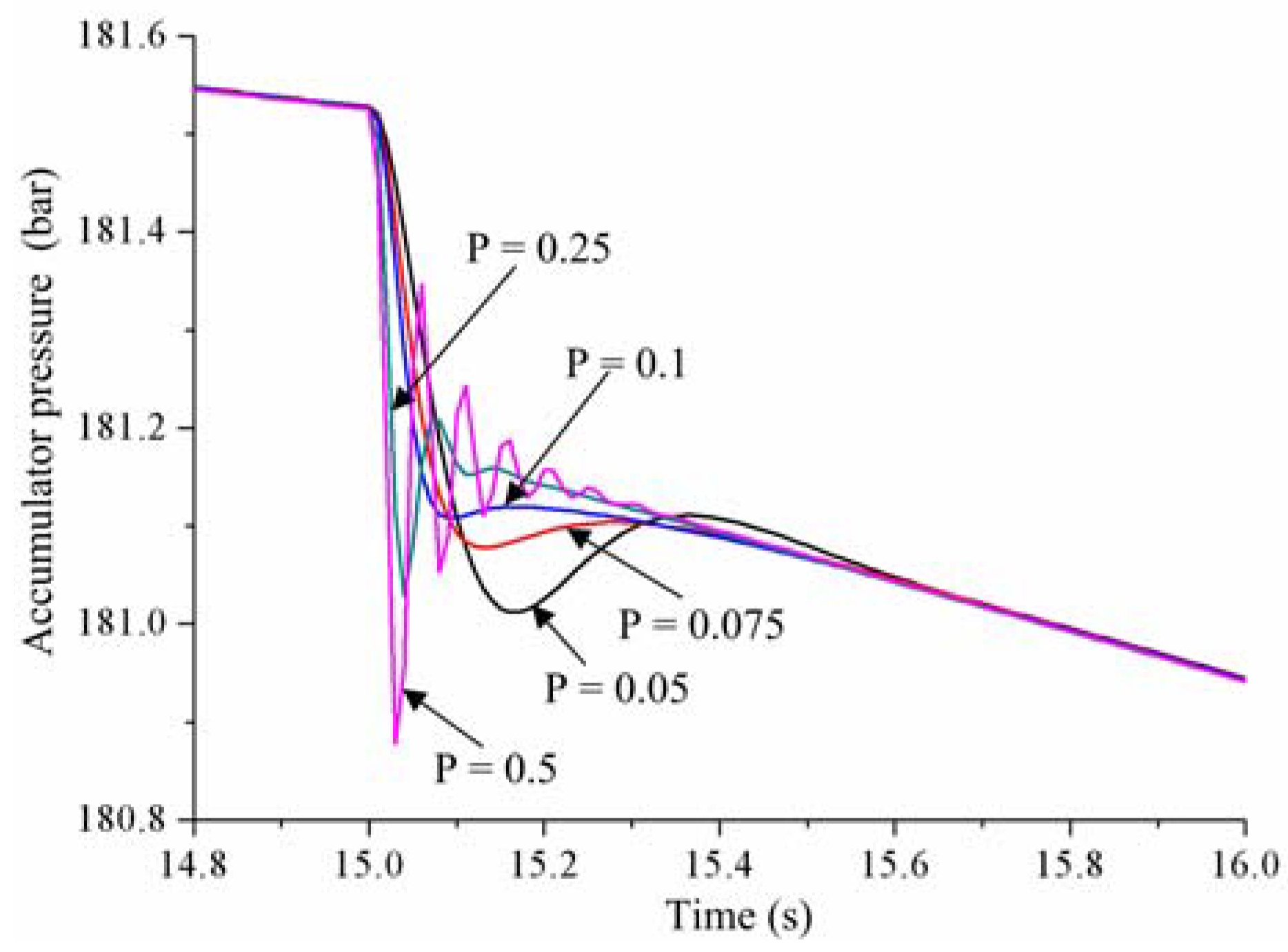
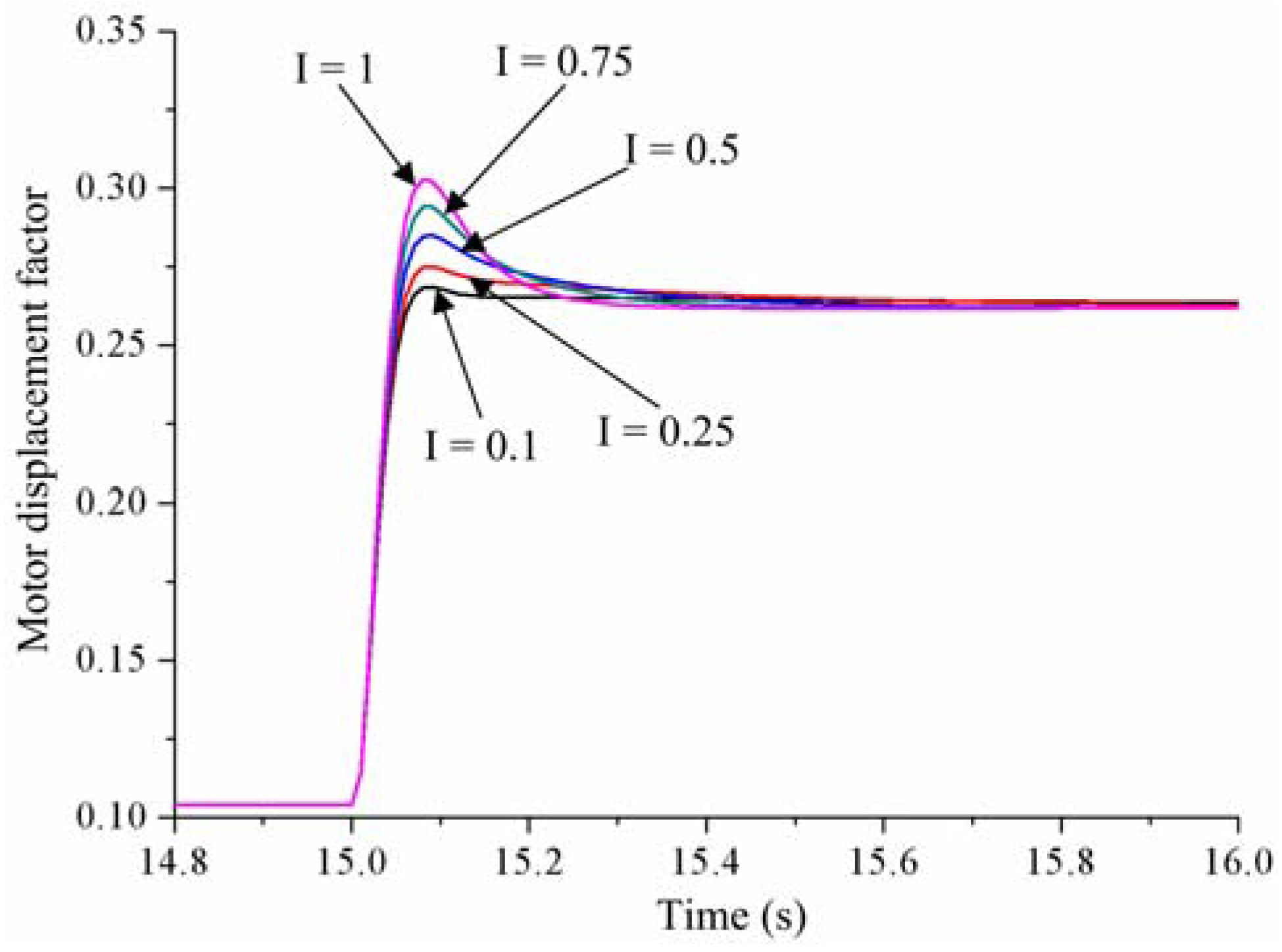
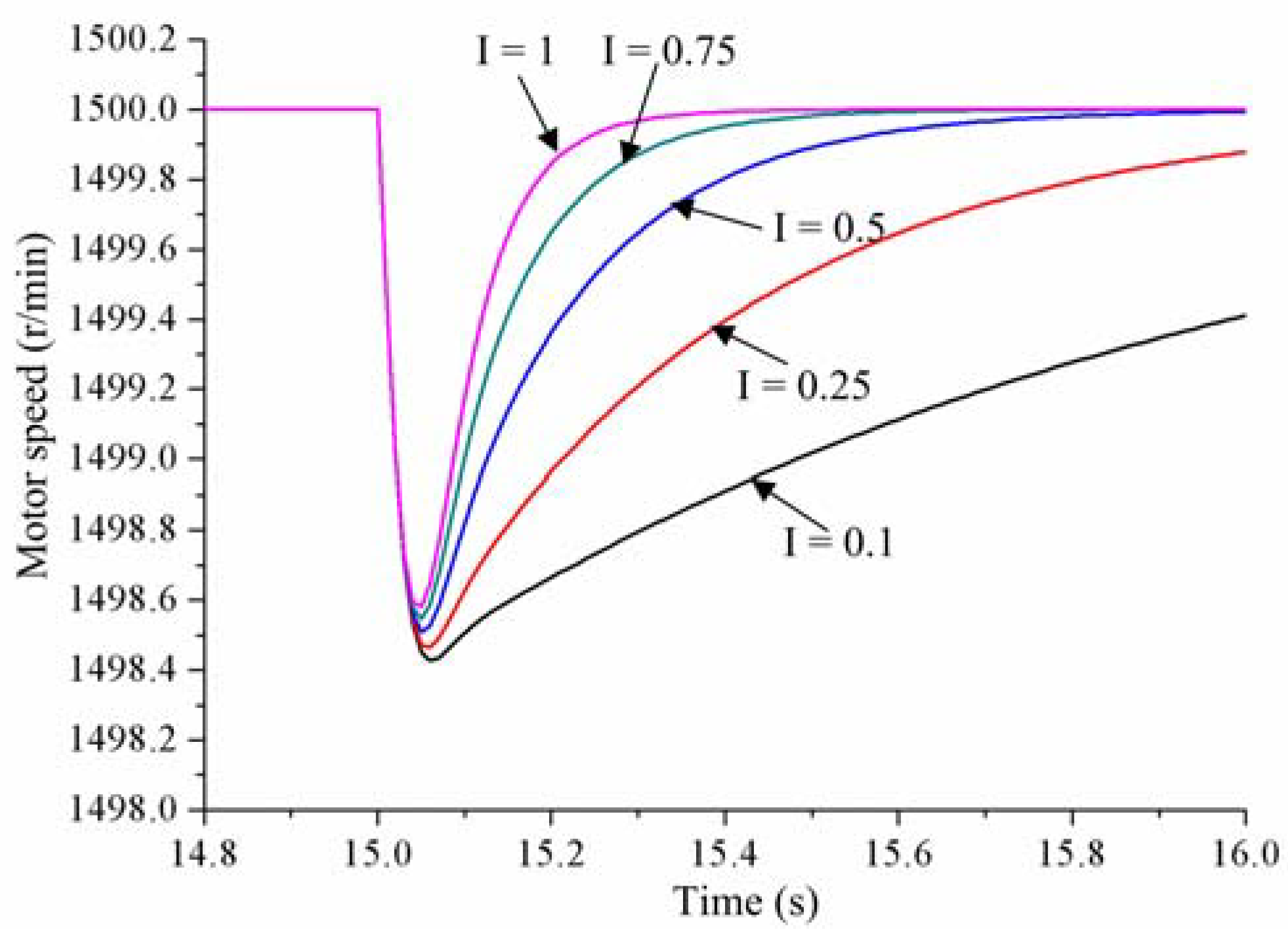
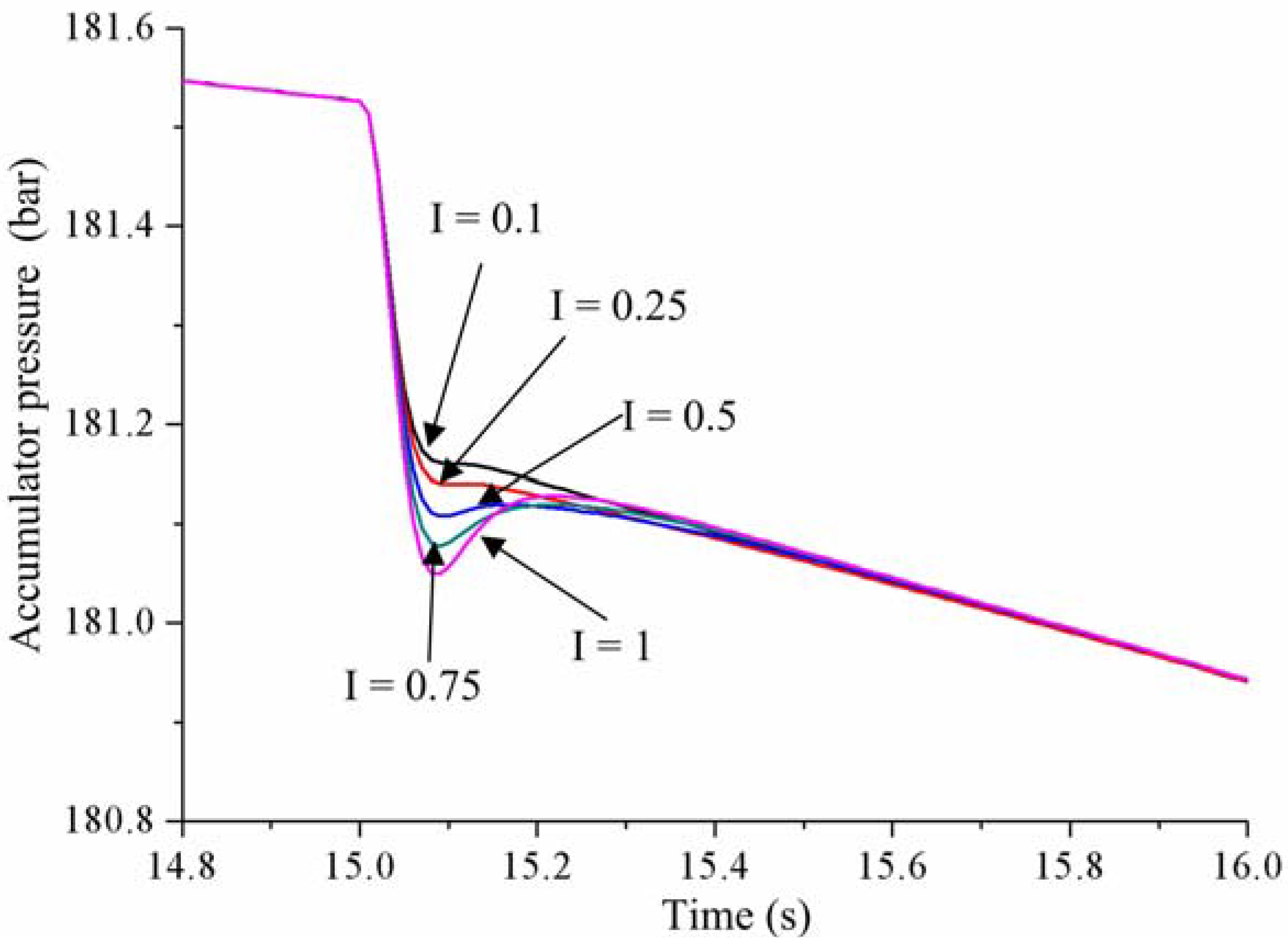
4.1. Simulations of the Robustness on Constant Load Power Step
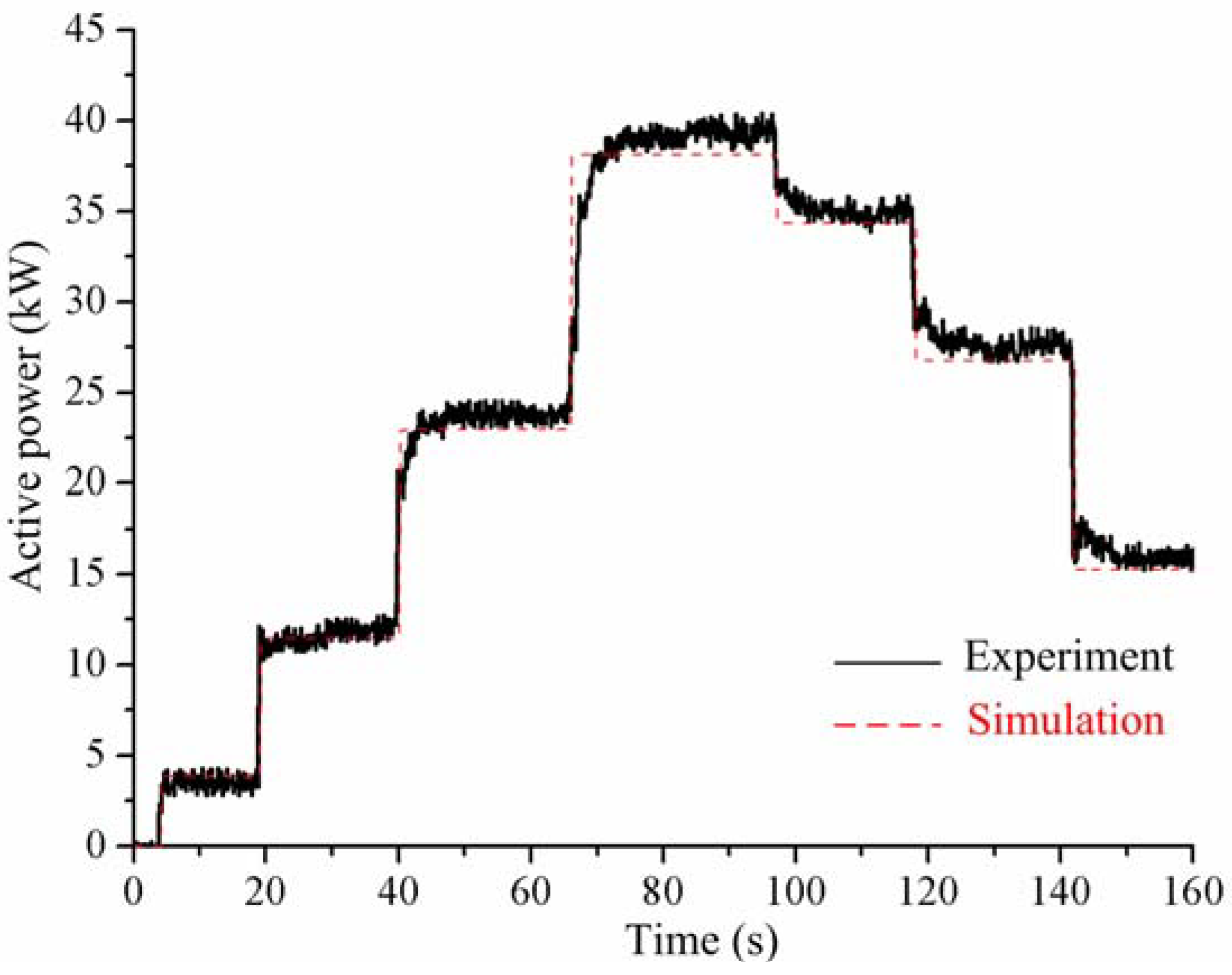
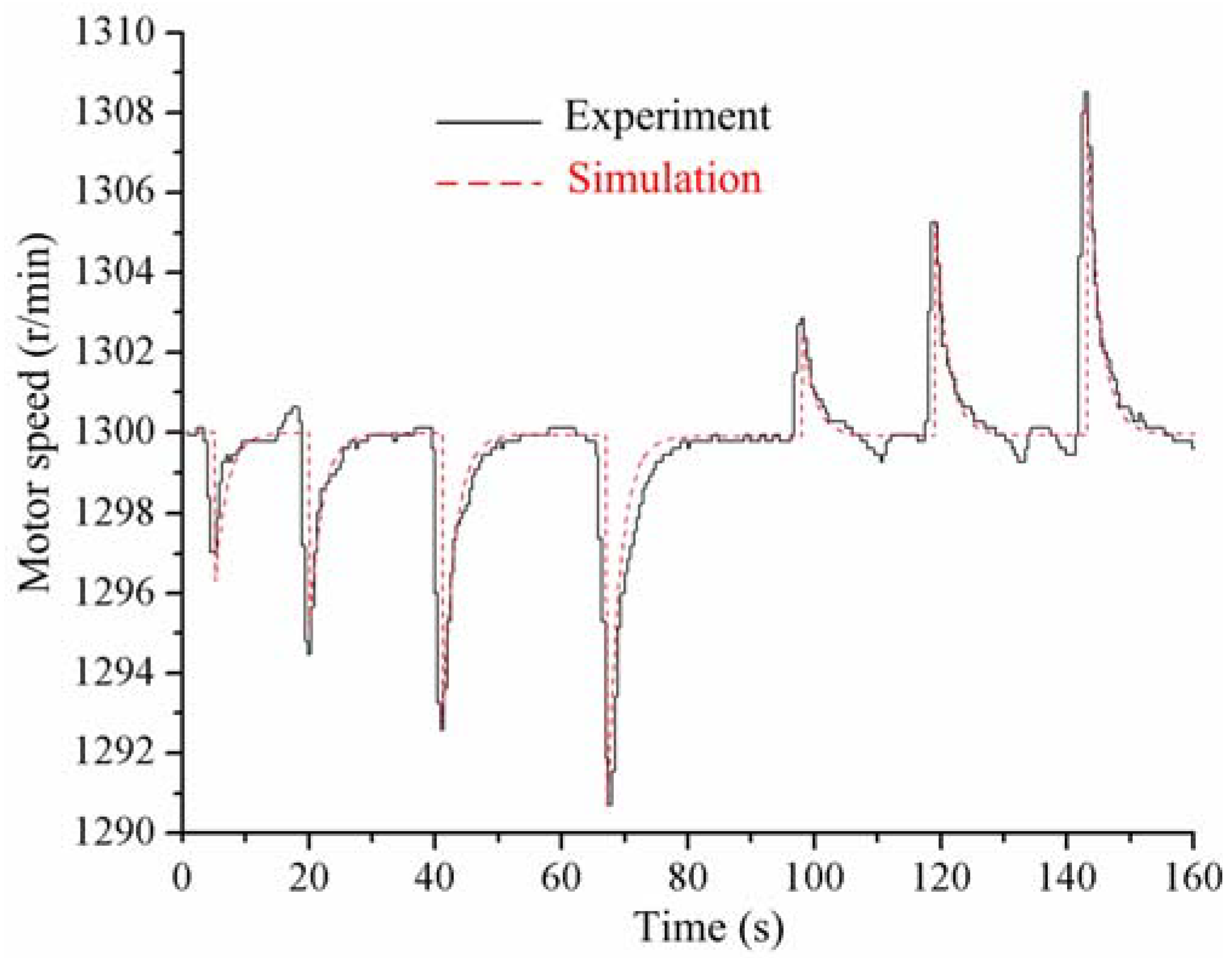
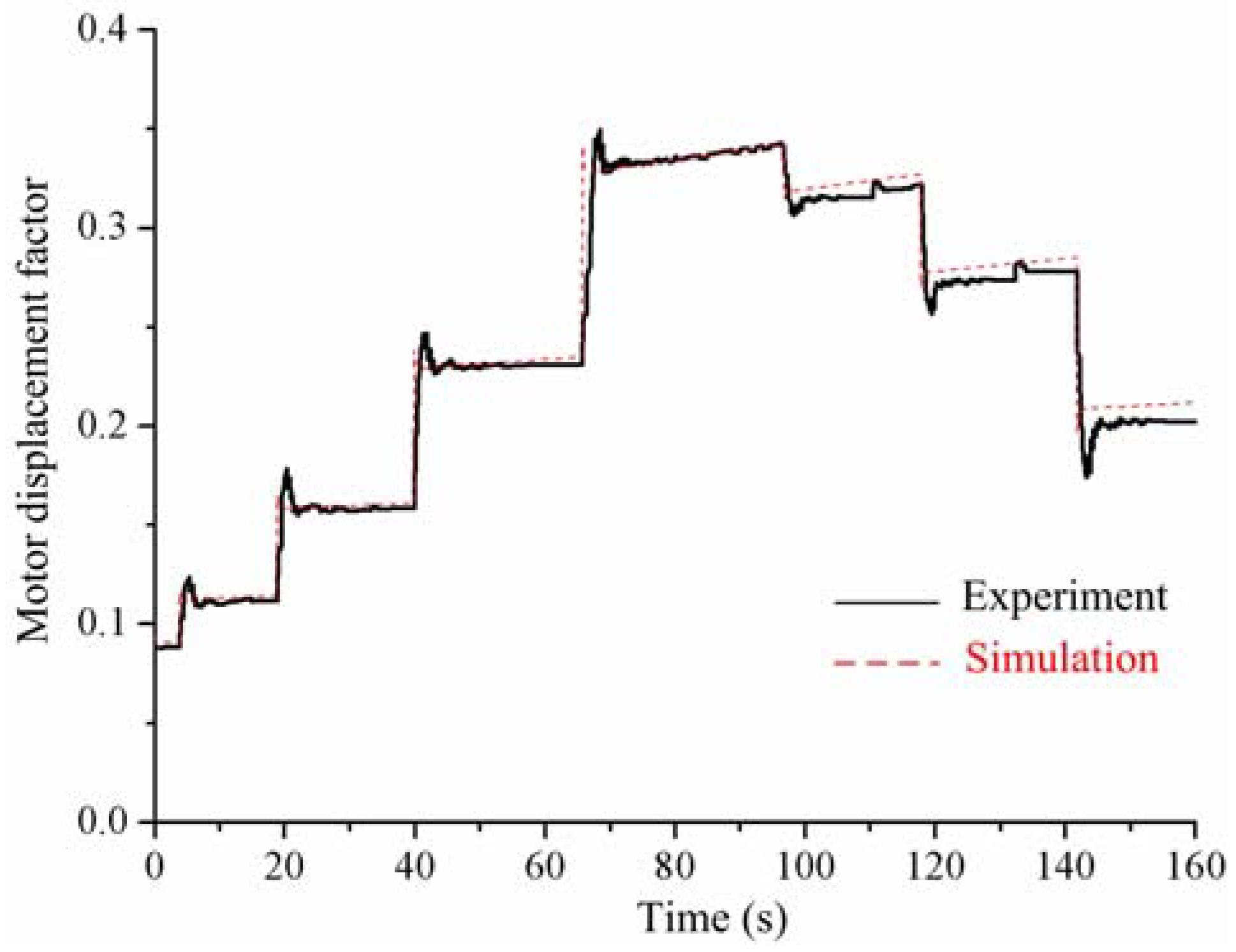
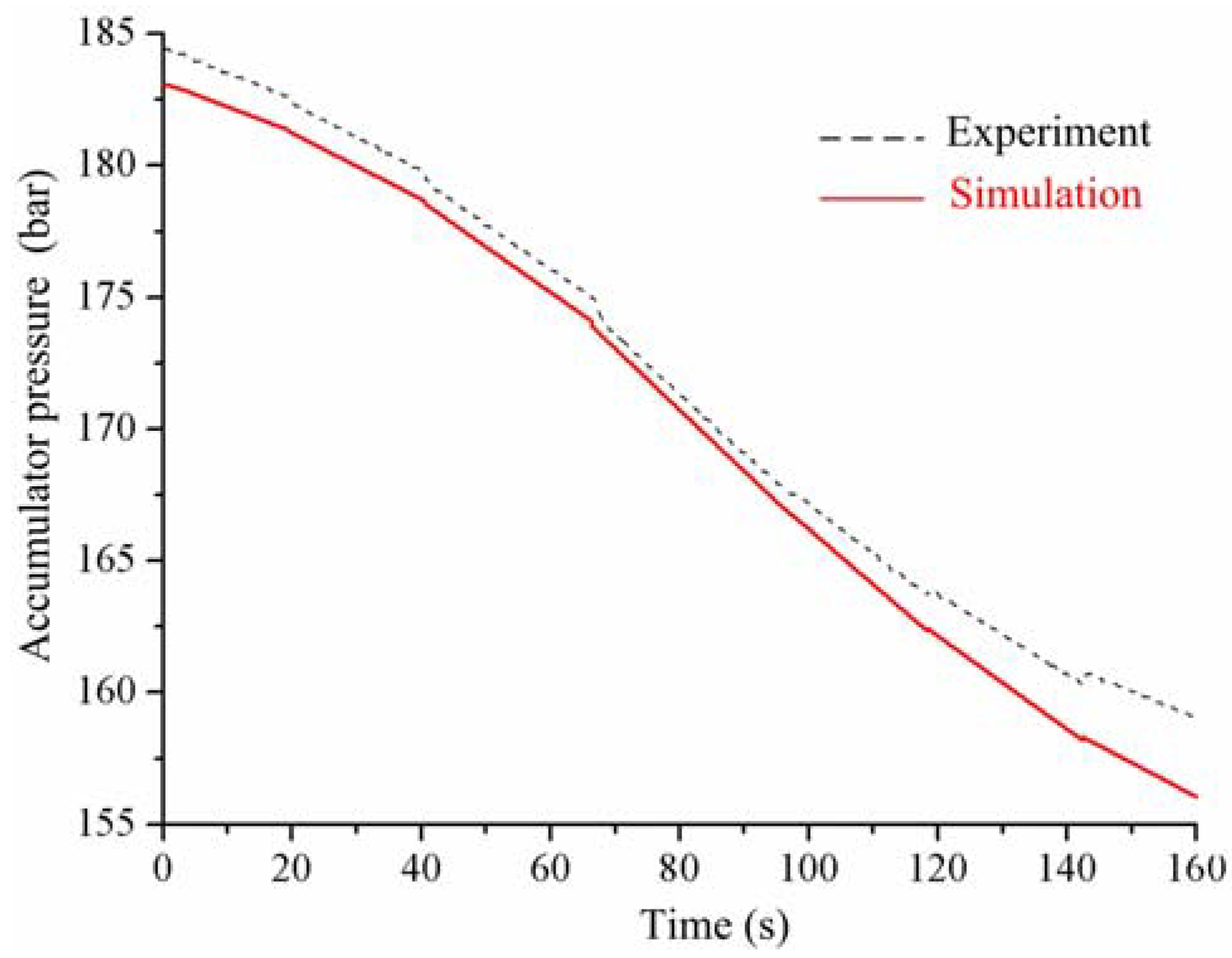
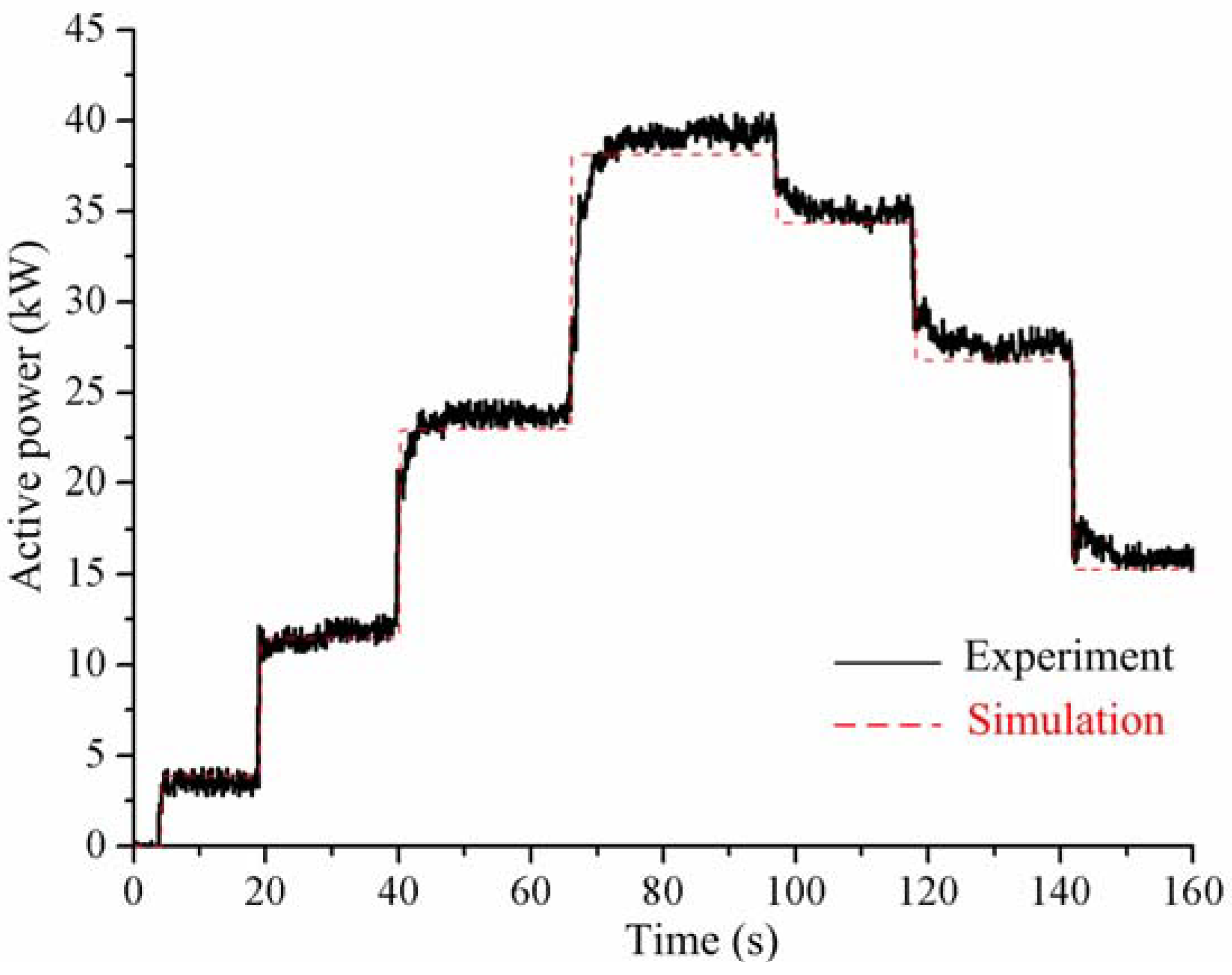
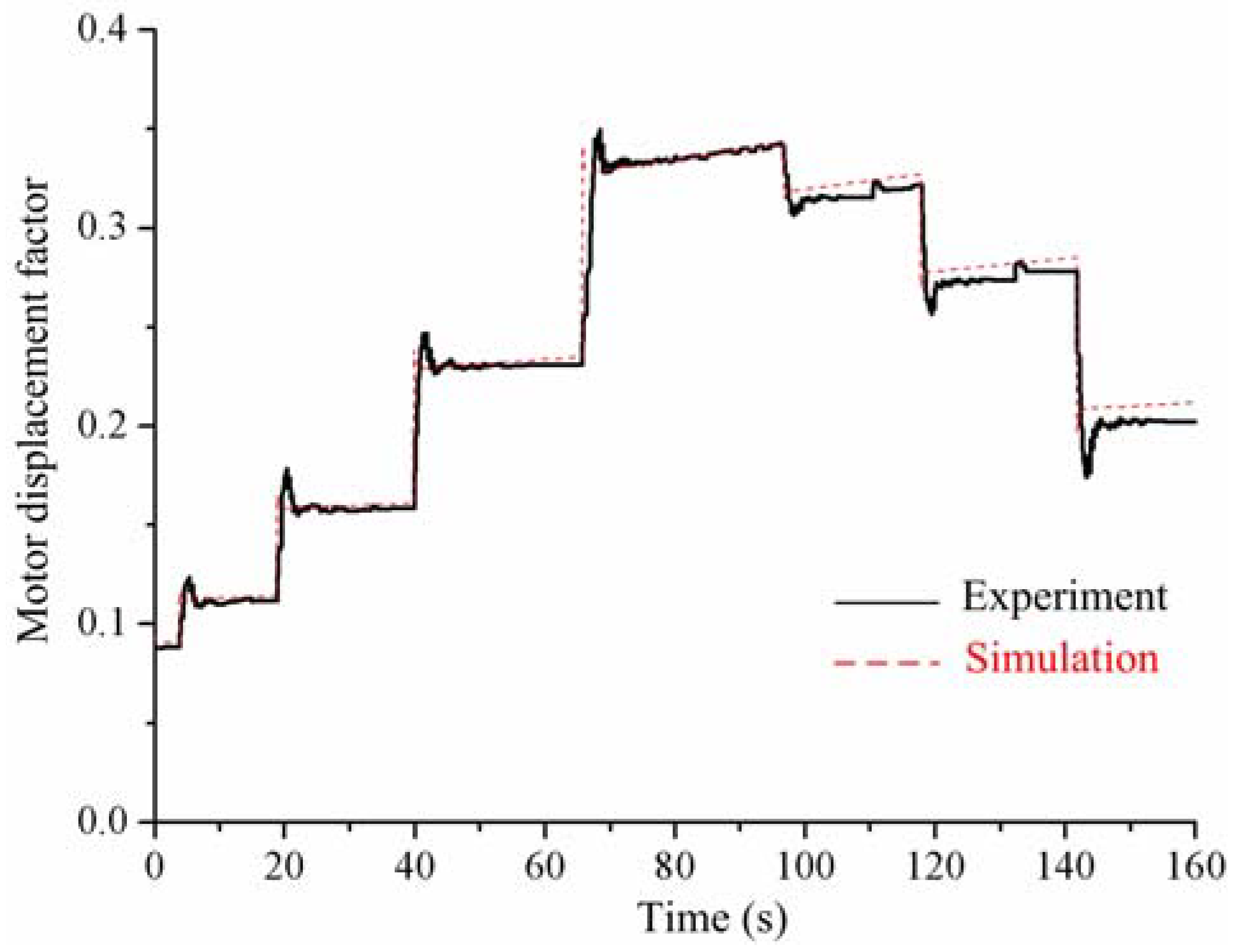
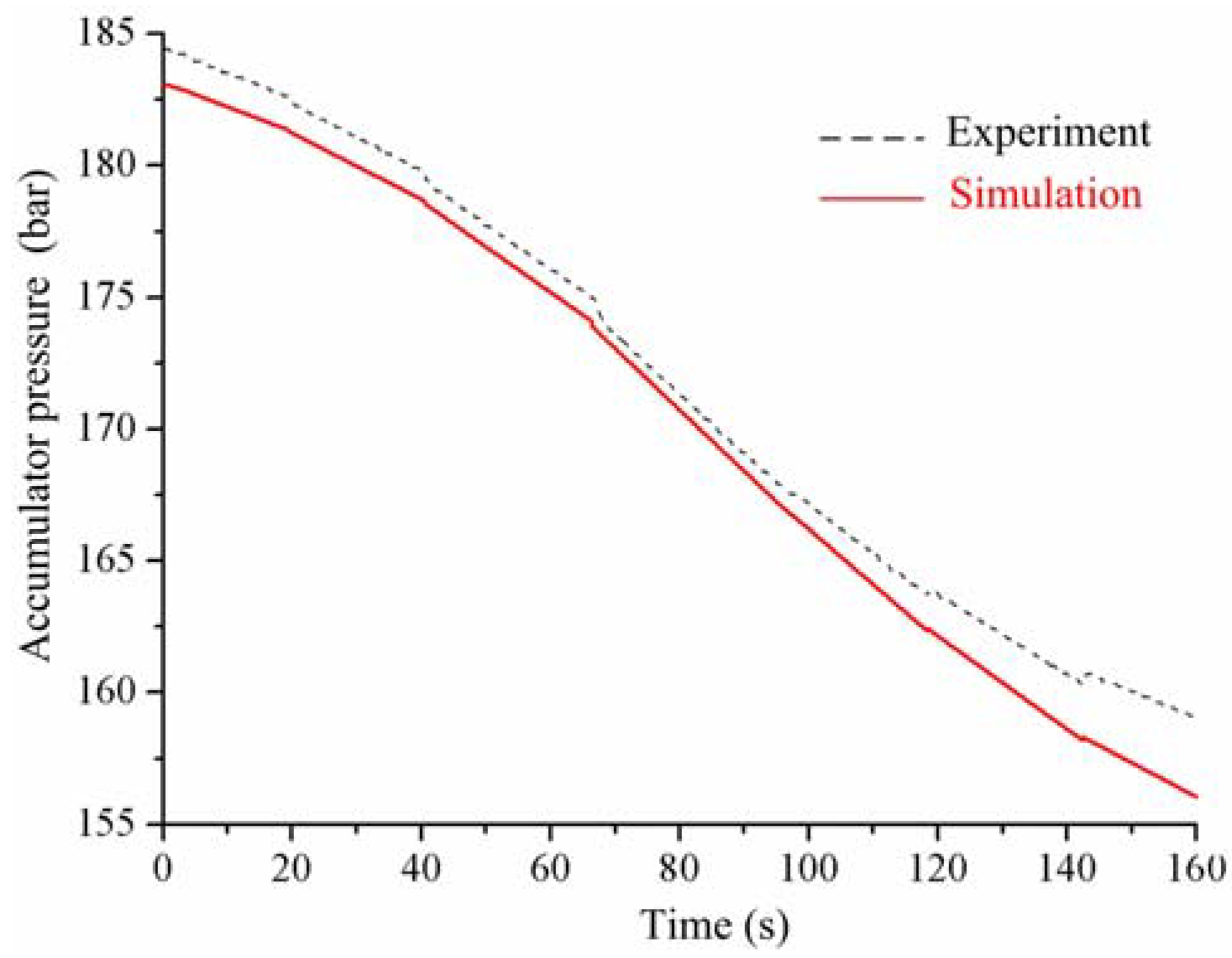
4.2. Experiments of the Robustness on Varied Load Power Step
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Jha, D. A comprehensive review on wind energy systems for electric power generation: Current situation and improved technologies to realize future development. Int. J. Renew. Energy Res. 2017, 7, 1786–1805. [Google Scholar]
- Global Wind Energy Council (GWEC). Global Wind Report: Annual Market Update; GWEC: Brussels, Belgium, 2016. [Google Scholar]
- Silva, P.; Giuffrida, A.; Fergnani, N.; Macchi, E.; Cantù, M.; Suffredini, R.; Schiavetti, M.; Gigliucci, G. Performance prediction of a multi-MW wind turbine adopting an advanced hydrostatic transmission. Energy 2014, 64, 450–461. [Google Scholar] [CrossRef]
- Ragheb, A.; Ragheb, M. Wind turbine gearbox technologies. In Proceedings of the 2010 1st International Nuclear Renewable Energy Conference (INREC), Amman, Jordan, 21–24 March 2010. [Google Scholar]
- Saidur, R.; Rahim, N.A.; Islam, M.R.; Solangi, K.H. Environmental impact of wind energy. Renew. Sustain. Energy Rev. 2011, 15, 2423–2430. [Google Scholar] [CrossRef]
- Pedersen, E.; Larsman, P. The impact of visual factors on noise annoyance among people living in the vicinity of wind turbines. J. Environ. Psychol. 2008, 28, 379–389. [Google Scholar] [CrossRef]
- Polinder, H.; van de Pijl, F.F.A.; de Vilder, G.J.; Tavner, P.J. Comparison of direct-drive and geared generator concepts for wind turbines. IEEE Trans. Energy Convers. 2006, 21, 725–733. [Google Scholar] [CrossRef]
- Cai, M.; Wang, Y.; Jiao, Z.; Shi, Y. Review of fluid and control technology of hydraulic wind turbines. Front. Mech. Eng. 2017, 12, 312–320. [Google Scholar] [CrossRef]
- Nikranjbar, A.; Sharbabaki, A.N. Simulation and control of wind turbine using hydrostatic drive train. Majlesi J. Energy Manag. 2013, 2, 12–17. [Google Scholar]
- Jiang, Z.; Yang, L.; Gao, Z.; Moan, T. Numerical simulation of a wind turbine with a hydraulic transmission system. Energy Procedia 2014, 53, 44–55. [Google Scholar] [CrossRef]
- Zhang, Y.; Kong, X.; Li, H.; Chao, A. Controls of hydraulic wind turbine. In Proceedings of the 2015 International Conference on Mechanical Engineering and Electrical Systems, EDP Sciences, Singapore, 16–18 December 2015. [Google Scholar]
- Díaz-González, F.; Sumper, A.; Gomis-Bellmunt, O.; Villafáfila-Robles, R. A review of energy storage technologies for wind power applications. Renew. Sustain. Energy Rev. 2012, 16, 2154–2171. [Google Scholar] [CrossRef]
- Chudy, M.; Herbst, L.; Lalk, J. Wind farms associated with flywheel energy storage plants. In Proceedings of the Innovative Smart Grid Technologies Conference Europe (ISGT-Europe), Istanbul, Turkey, 12–15 October 2014. [Google Scholar]
- Ali, A.E.; Libardi, N.C.; Anwar, S.; Izadian, A. Design of a compressed air energy storage system for hydrostatic wind turbines. Energy 2018, 6, 229–244. [Google Scholar] [CrossRef]
- Liu, C.; Cheng, M.-S.; Zhao, B.-C.; Dai, Z.-M. A wind power plant with thermal energy storage for improving the utilization of wind energy. Energies 2017, 10, 2126. [Google Scholar] [CrossRef]
- Yao, D.L.; Choi, S.S.; Tseng, K.J.; Lie, T.T. A statistical approach to the design of a dispatchable wind power-battery energy storage system. IEEE Trans. Energy Convers. 2009, 24, 916–925. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, G.; Wei, L.; Yue, D. Variable speed and constant frequency control of hydraulic wind turbine with energy storage system. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Qin, C.; Innes-Wimsatt, E.; Loth, E. Hydraulic-electric hybrid wind turbines: Tower mass saving and energy storage capacity. Renew. Energy 2016, 99, 69–79. [Google Scholar] [CrossRef]
- Yu, H.; Liu, Y.; Wang, Y.; Wang, M.; Qin, X. Speed governing controller of gasoline engine based on integral-separation fuzzy PID control. In Proceedings of the 2016 3rd International Conference on Information Science and Control Engineering (ICISCE), Beijing, China, 8–10 July 2016. [Google Scholar]
- Jen, Y.; Lee, C. Robust speed control of a pump-controlled motor system. IEE Proc. D Control Theory Appl. 1992, 139, 503–510. [Google Scholar] [CrossRef]
- Xu, M.; Ni, J.; Chen, G. Dynamic simulation of variable-speed valve-controlled-motor drive system with a power-assisted device. J. Mech. Eng. 2014, 60, 581–591. [Google Scholar] [CrossRef]
- Hernandez, R.G.; Ramirez, R.G. Modeling and control of a wind turbine synchronous generator. In Proceedings of the Electronics, Robotics and Automotive Mechanics Conference(CERMA), Cuernavaca, Morelos, Mexico, 15–18 November 2011. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Accumulator volume | V0 | 6000 | L |
| Gas precharge pressure | P0 | 100 | bar |
| Accumulator pressure | Pa | 185 | bar |
| Pipe diameter | Dp | 76 | mm |
| Pipe length | Lp | 2 | m |
| Motor displacement | Vm | 500 | cm3/rev |
| Moment of inertia | Jt | 60 | kg·m2 |
| Coefficient of viscosity | Bv | 0.05 | Nm/(r/min) |
| Number of pole pairs | P | 2 | |
| Stator winding resistance | Ra | 0.006 | Ω |
| Motor speed command | Us | 1500 | r/min |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Yang, G.; Wei, L.; Yue, D.; Tao, Y. Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation. Energies 2018, 11, 1310. https://doi.org/10.3390/en11051310
Liu Z, Yang G, Wei L, Yue D, Tao Y. Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation. Energies. 2018; 11(5):1310. https://doi.org/10.3390/en11051310
Chicago/Turabian StyleLiu, Zengguang, Guolai Yang, Liejiang Wei, Daling Yue, and Yanhua Tao. 2018. "Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation" Energies 11, no. 5: 1310. https://doi.org/10.3390/en11051310
APA StyleLiu, Z., Yang, G., Wei, L., Yue, D., & Tao, Y. (2018). Research on the Robustness of the Constant Speed Control of Hydraulic Energy Storage Generation. Energies, 11(5), 1310. https://doi.org/10.3390/en11051310