Peukert-Equation-Based State-of-Charge Estimation for LiFePO4 Batteries Considering the Battery Thermal Evolution Effect



Abstract
1. Introduction
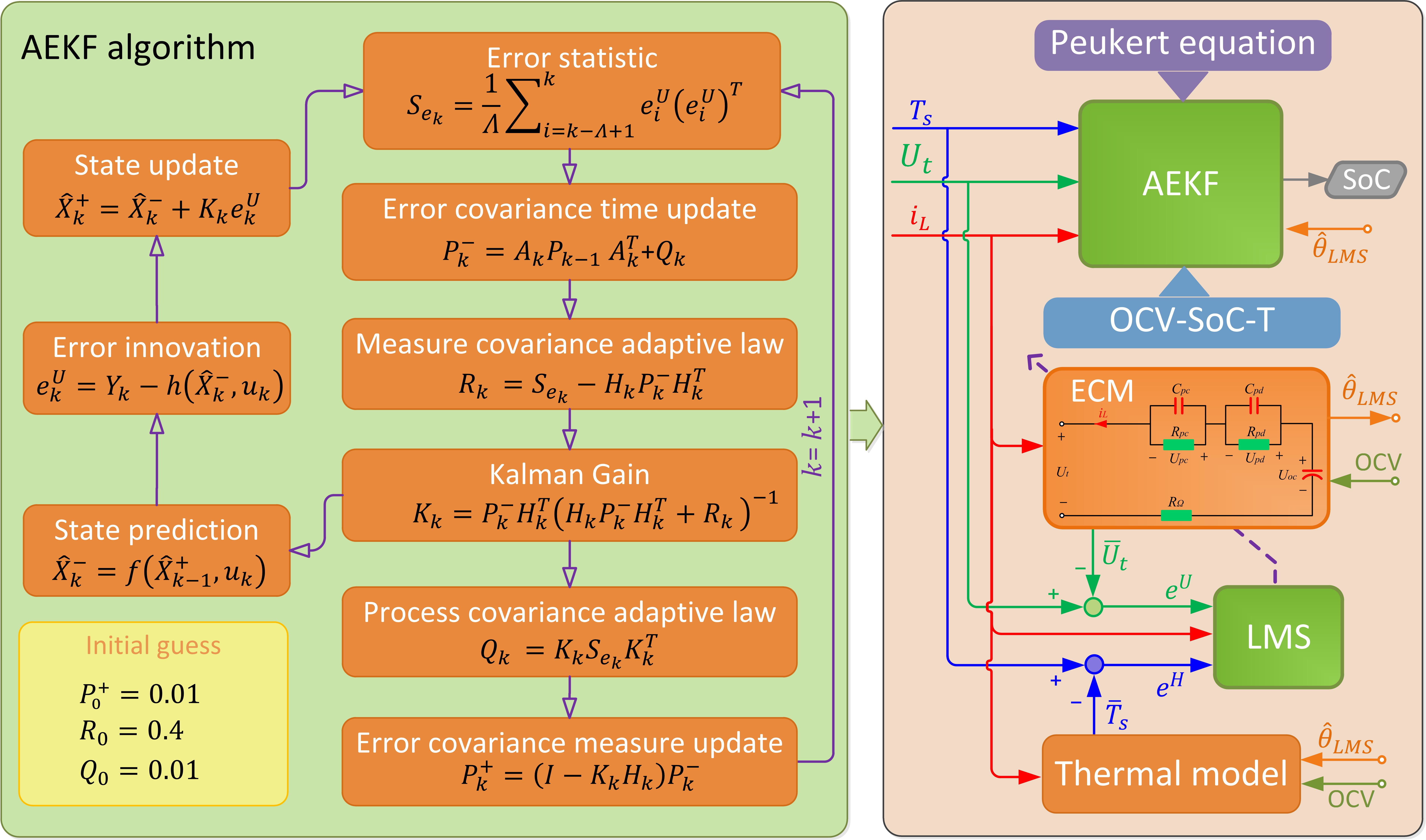
2. Equipment and Tests
2.1. OCV–SoC Correlation Test
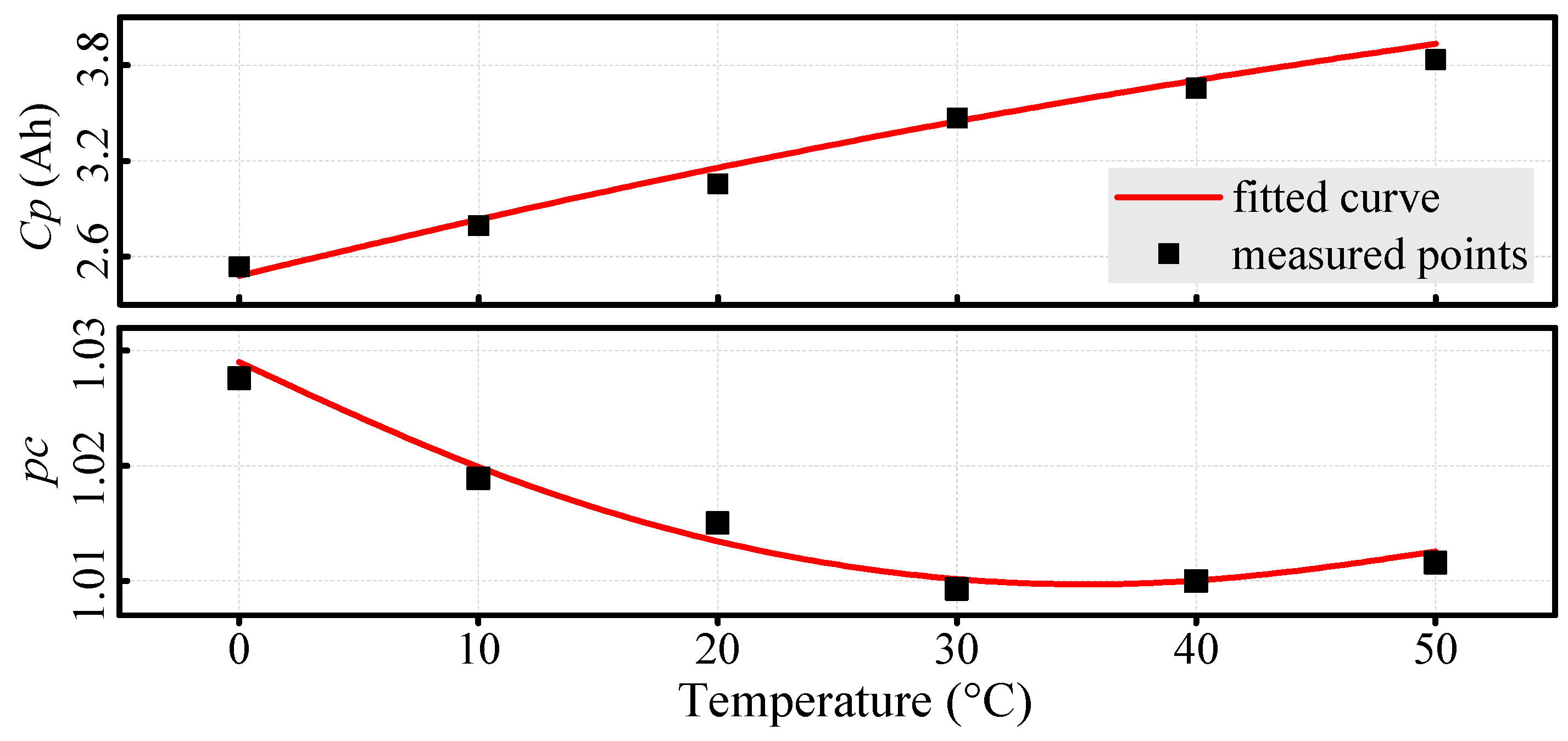
2.2. Peukert Coefficient Identification Test
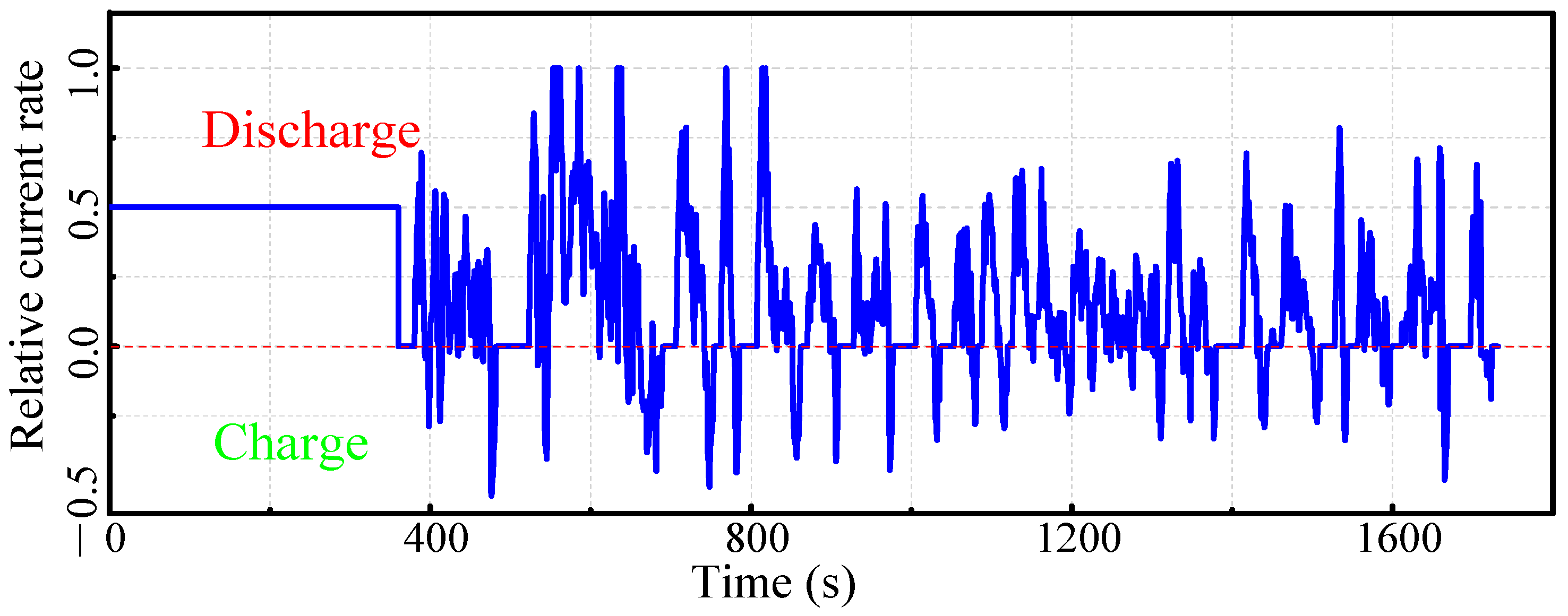
2.3. Method Validation Test
3. Battery Modeling
3.1. ECM
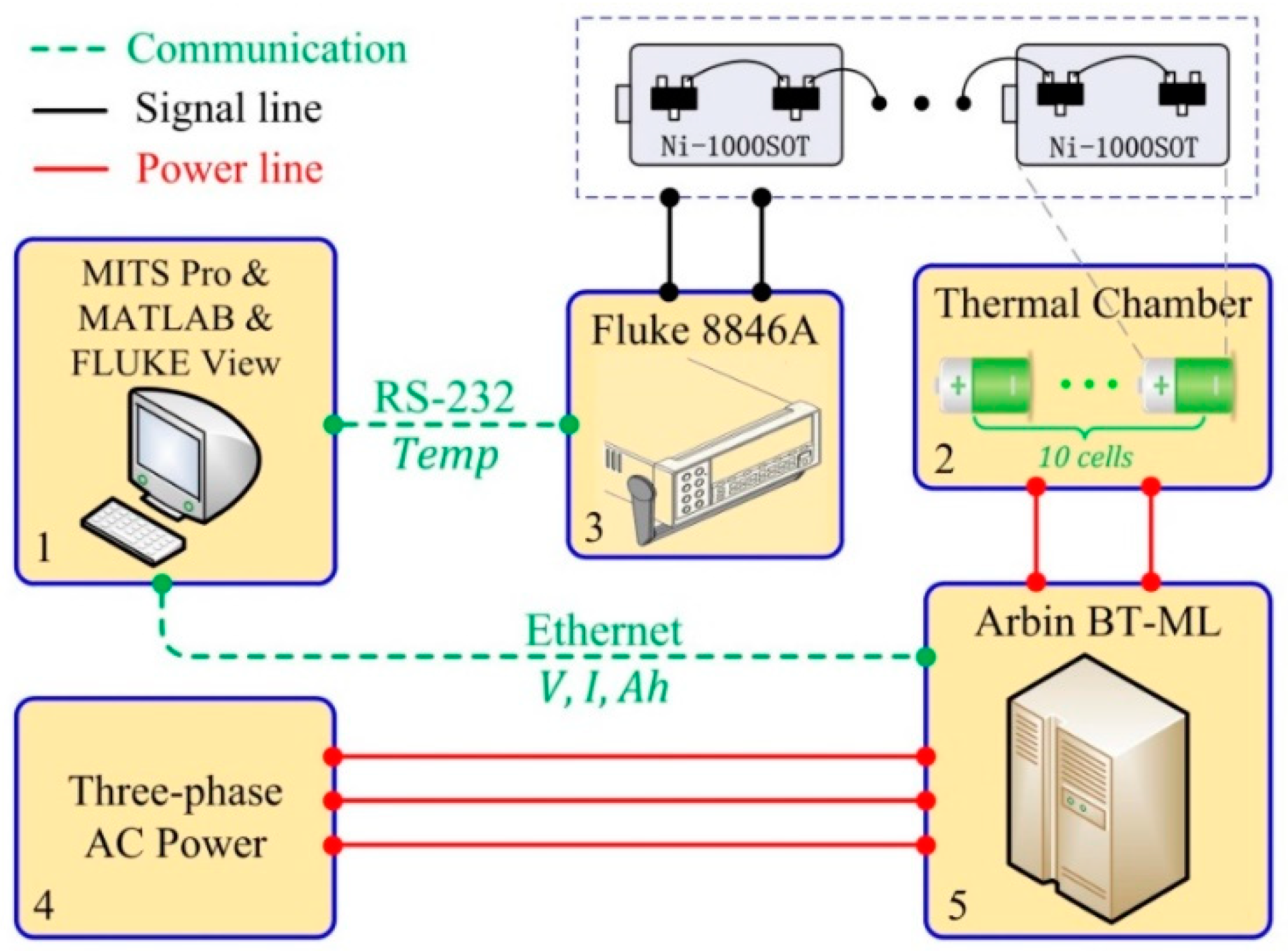
3.2. OCV–SoC–T Correlation
3.3. Thermal Effect Modeling
4. Parameter Identification and SoC Estimation
4.1. On-Line Parameter Identification
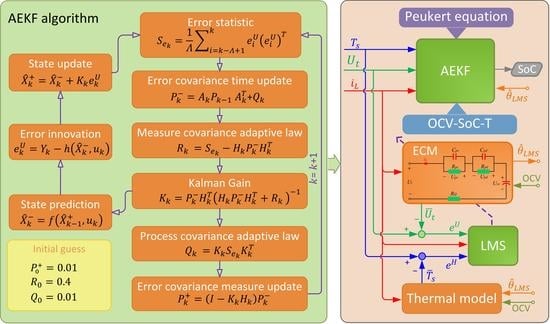
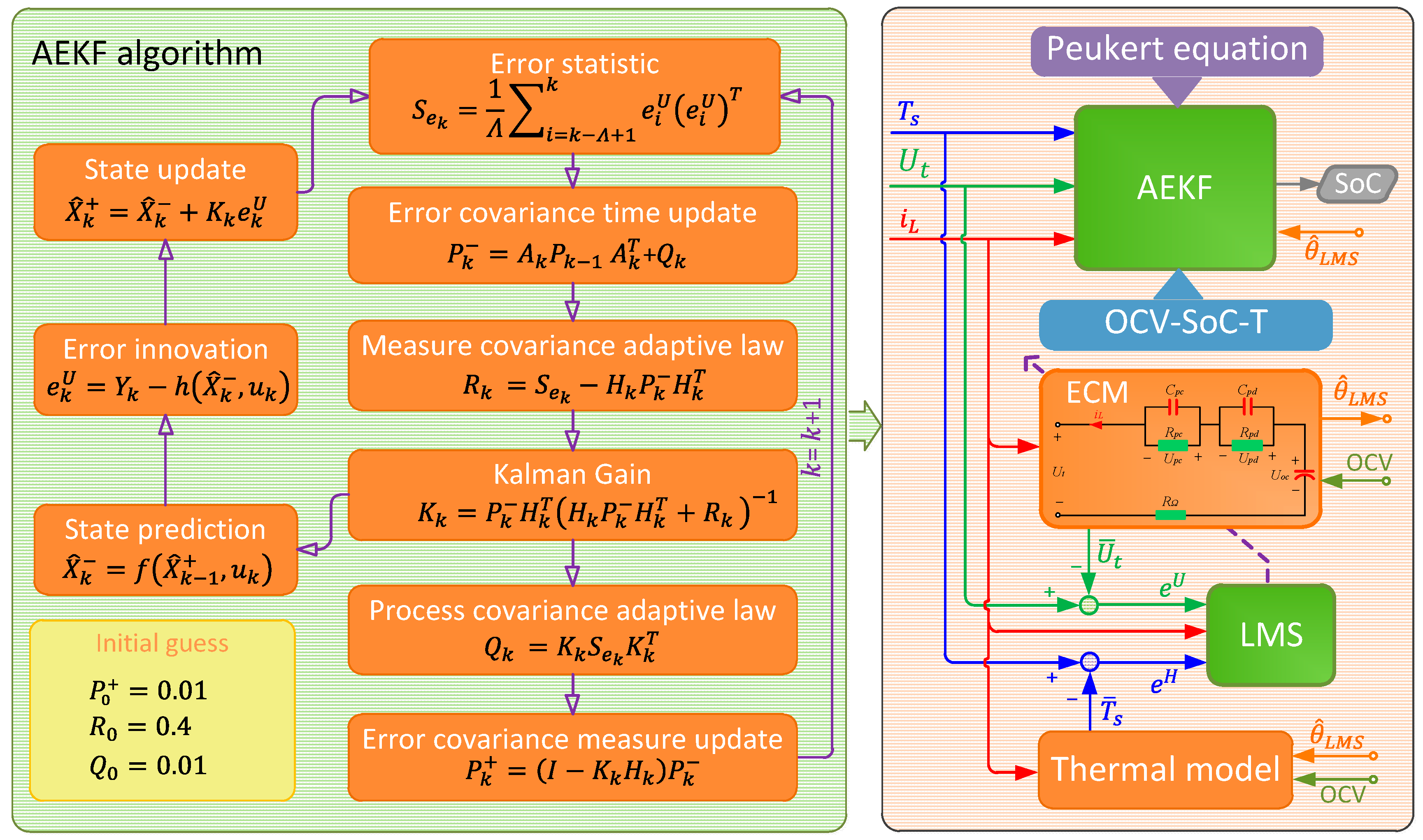
4.2. SoC Estimation Based on AEKF
5. Results and Discussion
5.1. TEM Impact on On-Line Parameter Update
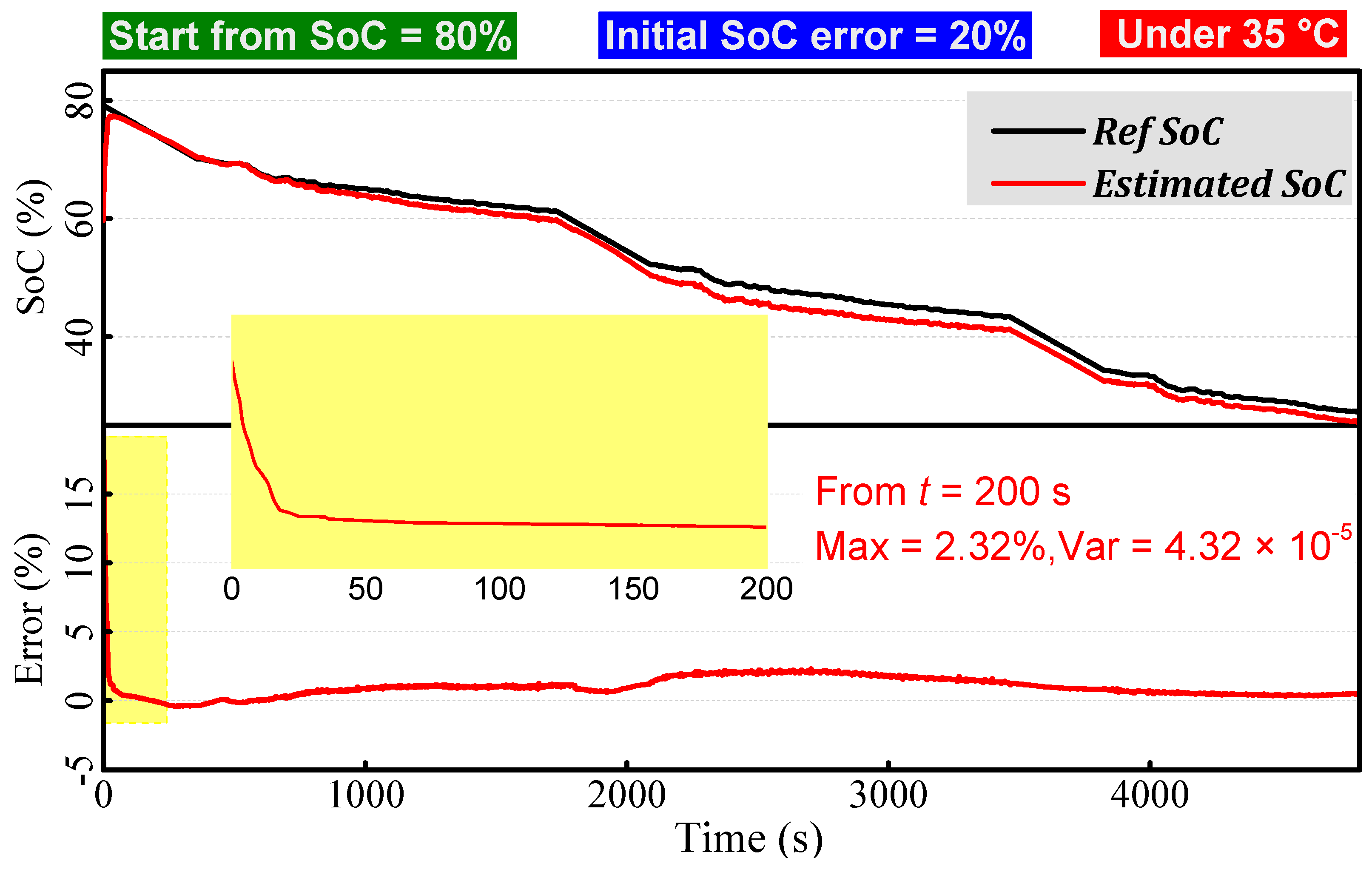
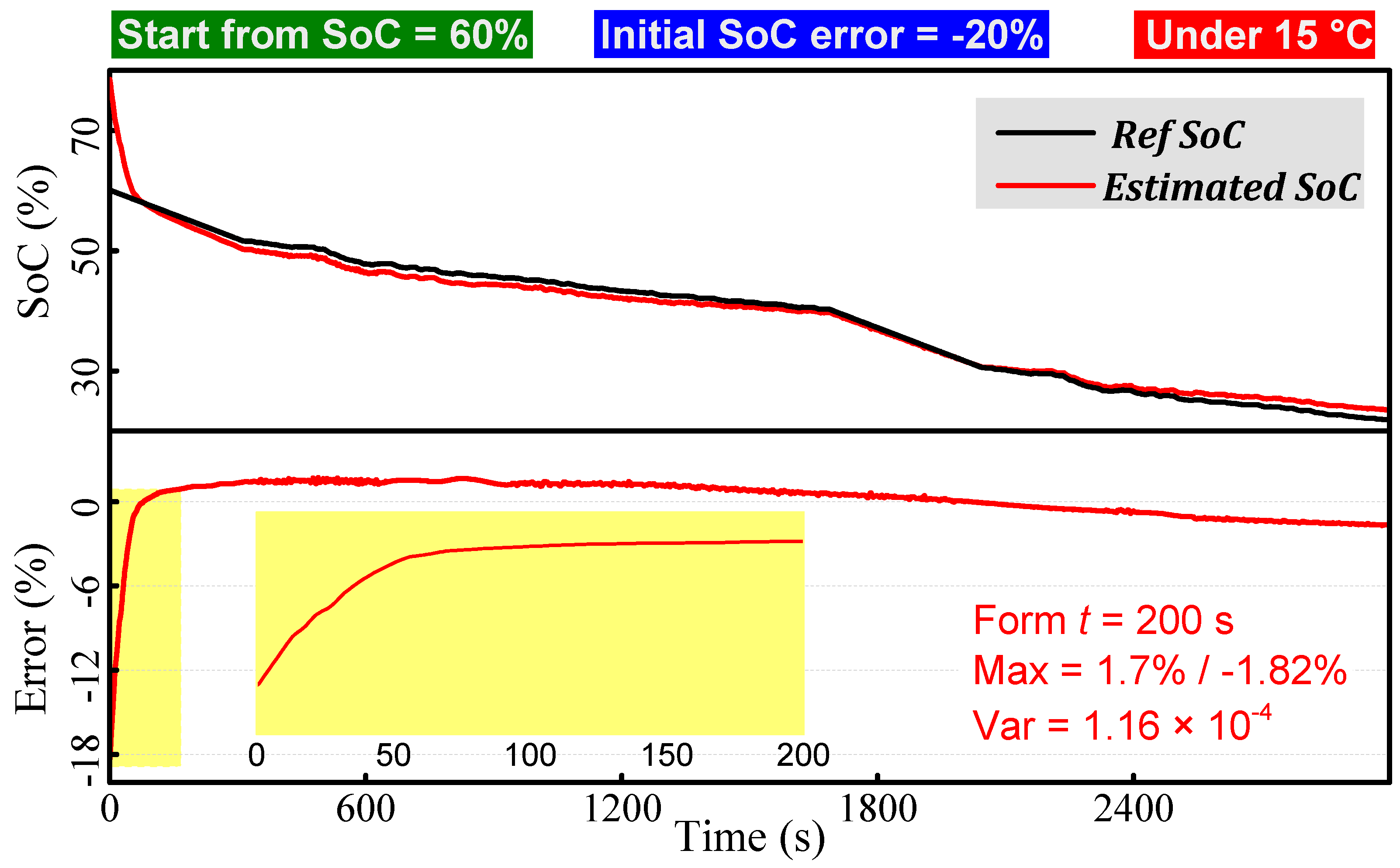
5.2. SoC Estimation Under Constant Temperatures
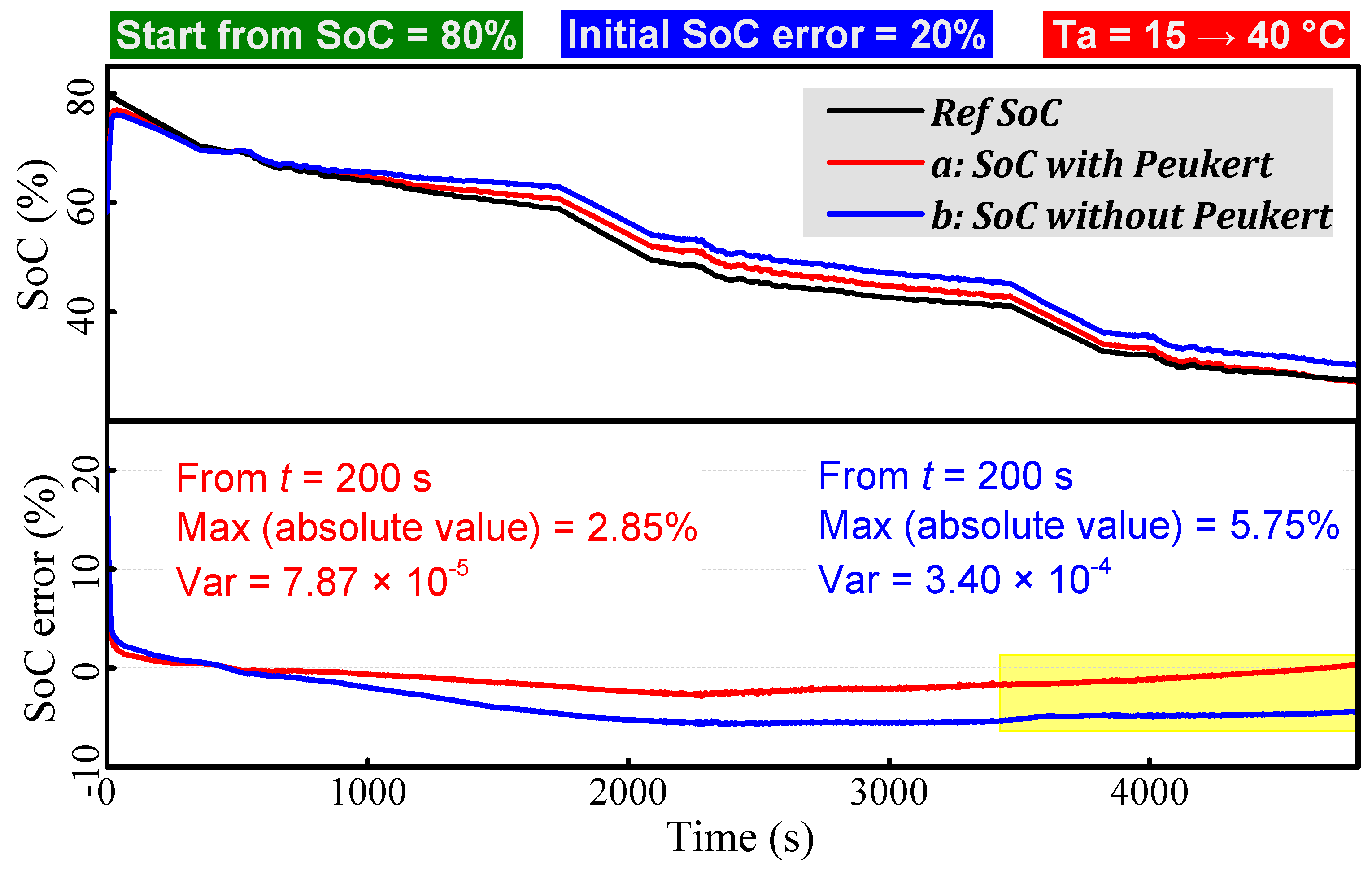
5.3. SoC Estimation under Varying Temperatures
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rauh, N.; Franke, T.; Krems, J.F. Understanding the impact of electric vehicle driving experience on range anxiety. Hum. Factors 2015, 57, 177–187. [Google Scholar] [CrossRef] [PubMed]
- Sheikh, M.; Elmarakbi, A.; Rehman, S. Thermal and Electrical Failure Analysis of Lithium-Ion Battery after Crash. 2nd IEEC 2017. Available online: http://sure.sunderland.ac.uk/8061/ (accessed on 7 February 2018).
- Li, Y.; Wang, C.; Gong, J. A wavelet transform-adaptive unscented Kalman filter approach for state of charge estimation of LiFePo4 battery. Int. J. Energy Res. 2017, 42, 587–600. [Google Scholar] [CrossRef]
- Zhang, C.; Li, K.; Pei, L. An integrated approach for real-time model-based state-of-charge estimation of lithium-ion batteries. J. Power Sources 2015, 283, 24–36. [Google Scholar] [CrossRef]
- Waag, W.; Fleischer, C.; Sauer, D.U. Critical review of the methods for monitoring of lithium-ion batteries in electric and hybrid vehicles. J. Power Sources 2014, 258, 321–339. [Google Scholar] [CrossRef]
- Kang, L.W.; Zhao, X.; Ma, J. A new neural network model for the state-of-charge estimation in the battery degradation process. Appl. Energy 2014, 121, 20–27. [Google Scholar] [CrossRef]
- Hametner, C.; Jakubek, S. State of charge estimation for Lithium Ion cells: Design of experiments, nonlinear identification and fuzzy observer design. J. Power Sources 2013, 238, 413–421. [Google Scholar] [CrossRef]
- Hu, J.N.; Hu, J.J.; Lin, H.B. State-of-charge estimation for battery management system using optimized support vector machine for regression. J. Power Sources 2014, 269, 682–693. [Google Scholar] [CrossRef]
- Seaman, A.; Dao, T.S.; McPhee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Sources 2014, 256, 410–423. [Google Scholar] [CrossRef]
- Lai, X.; Zheng, Y.; Sun, T. A comparative study of different equivalent circuit models for estimating state-of-charge of lithium-ion batteries. Electrochim. Acta 2018, 259, 566–577. [Google Scholar] [CrossRef]
- Guo, X.; Kang, L.; Yao, Y.; Huang, Z.; Li, W. Joint estimation of the electric vehicle power battery state of charge based on the least squares method and the Kalman filter algorithm. Energies 2016, 9, 100. [Google Scholar] [CrossRef]
- Wei, J.; Dong, G.; Chen, Z. On-board adaptive model for state of charge estimation of lithium-ion batteries based on Kalman filter with proportional integral-based error adjustment. J. Power Sources 2017, 365, 308–319. [Google Scholar] [CrossRef]
- Yu, Z.; Huai, R.; Xiao, L. State-of-charge estimation for lithium-ion batteries using a kalman filter based on local linearization. Energies 2015, 8, 7854–7873. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Peukert, W. Über die Abhängigkeit der Kapacität von der Entladestromstärke bei. Bleiakkumulatoren. Elektrotechnische Z. 1897, 20, 20–21. [Google Scholar]
- Omar, N.; Bossche, P.V.D.; Coosemans, T.; Mierlo, J.V. Peukert revisited—Critical appraisal and need for modification for lithium-ion batteries. Energies 2013, 6, 5625–5641. [Google Scholar] [CrossRef]
- Doerffel, D.; Sharkh, S.A. A critical review of using the Peukert equation for determining the remaining capacity of lead-acid and lithium-ion batteries. J. Power Sources 2006, 155, 395–400. [Google Scholar] [CrossRef]
- Abu-Sharkh, S.; Doerffel, D. Rapid test and non-linear model characterisation of solid-state lithium-ion batteries. J. Power Sources 2004, 130, 266–274. [Google Scholar] [CrossRef]
- Pei, L.; Wang, T.; Lu, R. Development of a voltage relaxation model for rapid open-circuit voltage prediction in lithium-ion batteries. J. Power Sources 2014, 253, 412–418. [Google Scholar] [CrossRef]
- Bernardi, D.; Pawlikowski, E.; Newman, J. A general energy balance for battery systems. J. Electrochem. Soc. 1985, 132, 5–12. [Google Scholar] [CrossRef]
- Wei, Z.; Lim, T.M.; Skyllas-Kazacos, M.; Wai, N.; Tseng, K.J. Online state of charge and model parameter co-estimation based on a novel multi-timescale estimator for vanadium redox flow battery. Appl. Energy 2016, 172, 169–179. [Google Scholar] [CrossRef]
- Zhang, C.; Allafi, W.; Dinh, Q. Online estimation of battery equivalent circuit model parameters and state of charge using decoupled least squares technique. Energy 2018, 142, 678–688. [Google Scholar] [CrossRef]
- Dong, G.; Wei, J.; Zhang, C.; Chen, Z. Online state of charge estimation and open circuit voltage hysteresis modeling of LiFePO4 battery using invariant imbedding method. Appl. Energy 2016, 162, 163–171. [Google Scholar] [CrossRef]
- Wei, Z.; Zhao, J.; Ji, D.; Tseng, K.J. A multi-timescale estimator for battery state of charge and capacity dual estimation based on an online identified model. Appl. Energy 2017, 204, 1264–1274. [Google Scholar] [CrossRef]
- Chen, Z.; Mi, C.C.; Fu, Y. Online battery state of health estimation based on genetic algorithm for electric and hybrid vehicle applications. J. Power Sources 2013, 240, 184–192. [Google Scholar] [CrossRef]
- Li, X.; Shu, X.; Shen, J.; Xiao, R.; Yan, W.; Chen, Z. An On-Board Remaining Useful Life Estimation Algorithm for Lithium-Ion Batteries of Electric Vehicles. Energies 2017, 10, 691. [Google Scholar] [CrossRef]
- Li, J.; Barillas, J.K.; Guenther, C. Sequential Monte Carlo filter for state estimation of LiFePO4 batteries based on an online updated model. J. Power Sources 2014, 247, 156–162. [Google Scholar] [CrossRef]
- Xiong, R.; Sun, F.; He, H.; Nguyen, T.D. A data-driven adaptive state of charge and power capability joint estimator of lithium-ion polymer battery used in electric vehicles. Energy 2013, 63, 295–308. [Google Scholar] [CrossRef]
- Wei, Z.; Zou, C.; Leng, F.; Soong, B.H.; Tseng, K.J. Online model identification and state-of-charge estimate for lithium-ion battery with a recursive total least squares-based observer. IEEE Trans. Ind. Electron. 2018, 65, 1336–1346. [Google Scholar] [CrossRef]
- Mehra, R. Approaches to adaptive filtering. IEEE Trans. Autom. Control 1972, 17, 693–698. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Chemistry | LiFePO4/graphite |
| Rated capacity () | 3.3 Ah@1C 27 °C |
| Nominal voltage | 3.2 V |
| Upper cut-off voltage | 3.65 V |
| Lower cut-off voltage | 2.0 V |
| Operation temperature | −10–55 °C |
| 29.10 | −23.97 | 0.347 | 4.448 | 1.166 | 11.55 | 4.656 × 10−3 | −4.392 × 10−5 |
| Symbol | Meaning | Value |
|---|---|---|
| Heat capacity | 1015 J·Kg−1·K−1 | |
| Convective heat transfer coefficient | 6.32 W·m−2·K−1 | |
| Effective surface area (10 cells) | 5.61 × 10−2 | |
| Mass (10 cells) | 0.89 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, J.; Ma, J.; Chen, J. Peukert-Equation-Based State-of-Charge Estimation for LiFePO4 Batteries Considering the Battery Thermal Evolution Effect. Energies 2018, 11, 1112. https://doi.org/10.3390/en11051112
Xie J, Ma J, Chen J. Peukert-Equation-Based State-of-Charge Estimation for LiFePO4 Batteries Considering the Battery Thermal Evolution Effect. Energies. 2018; 11(5):1112. https://doi.org/10.3390/en11051112
Chicago/Turabian StyleXie, Jiale, Jiachen Ma, and Jun Chen. 2018. "Peukert-Equation-Based State-of-Charge Estimation for LiFePO4 Batteries Considering the Battery Thermal Evolution Effect" Energies 11, no. 5: 1112. https://doi.org/10.3390/en11051112
APA StyleXie, J., Ma, J., & Chen, J. (2018). Peukert-Equation-Based State-of-Charge Estimation for LiFePO4 Batteries Considering the Battery Thermal Evolution Effect. Energies, 11(5), 1112. https://doi.org/10.3390/en11051112