Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Past Studies
1.2. Novelty of This Work
1.3. Structure of the Work
2. Methodology
2.1. Thermal Comfort and the PMV Index
- M: metabolic rate .
- : basic clothing insulation .
- : indoor air temperature .
- : relative humidity .
- : mean radiant temperature .
- : relative air velocity .
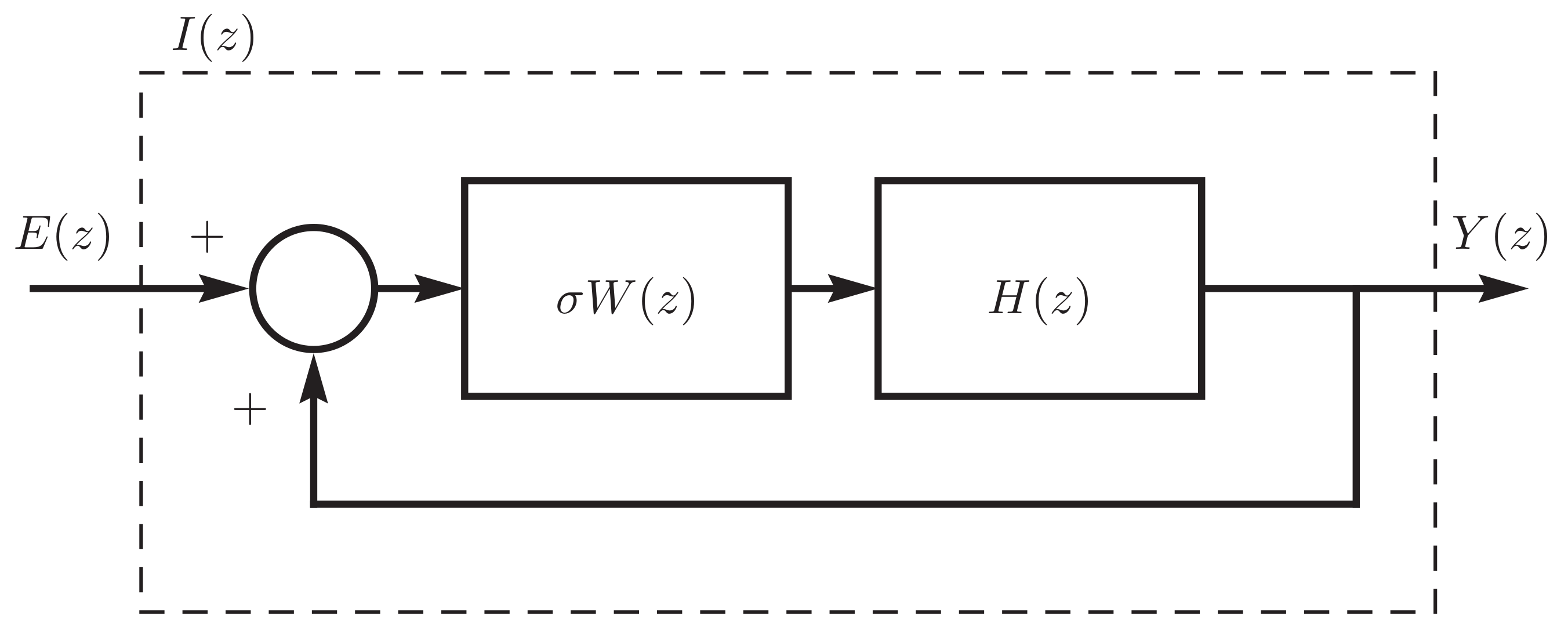
2.2. The Control System
2.3. Test Bed Model
2.3.1. CIESOL Building
2.3.2. Room Simulator
2.4. Linear Model and Person Profile
3. Results and Discussion
3.1. First Simulation Scenario: The Same Person Profile Every Day
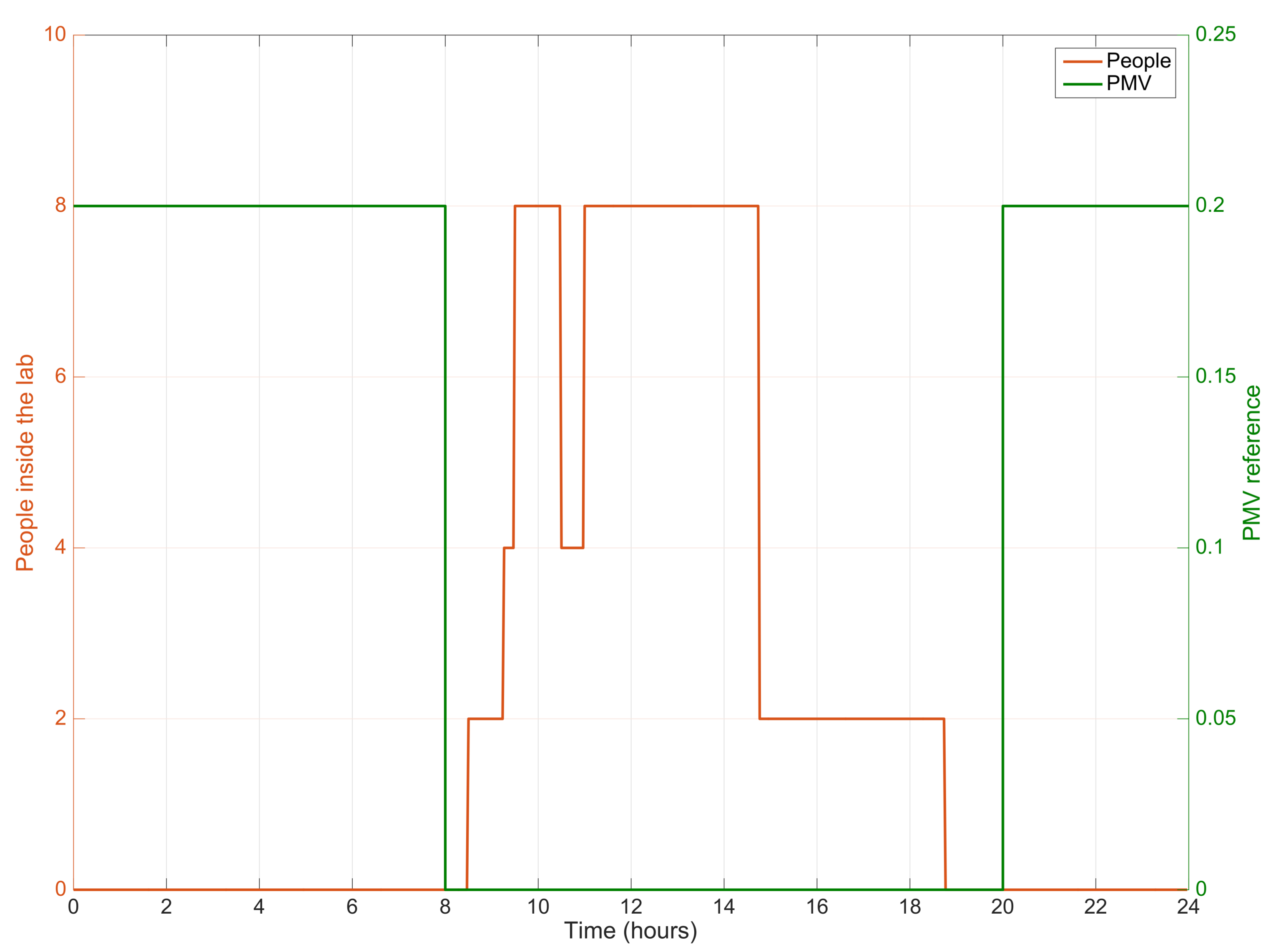
3.2. Second Simulation Scenario: Using Real Data from CIESOL Building
4. Conclusions
4.1. Summary of the Results
4.2. Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| E(z) | Error signal |
| Gc(z) | Inner controller |
| Gp(z) | Plant |
| Gx(z) | Stabilizing controller |
| H(z) | Null-phase low-pass filter |
| I | Basic clothing insulation |
| I | Diffuse solar irradiance |
| I | Direct solar irradiance |
| I | Reflected solar irradiance |
| k | Static gain PMV/(m/s) |
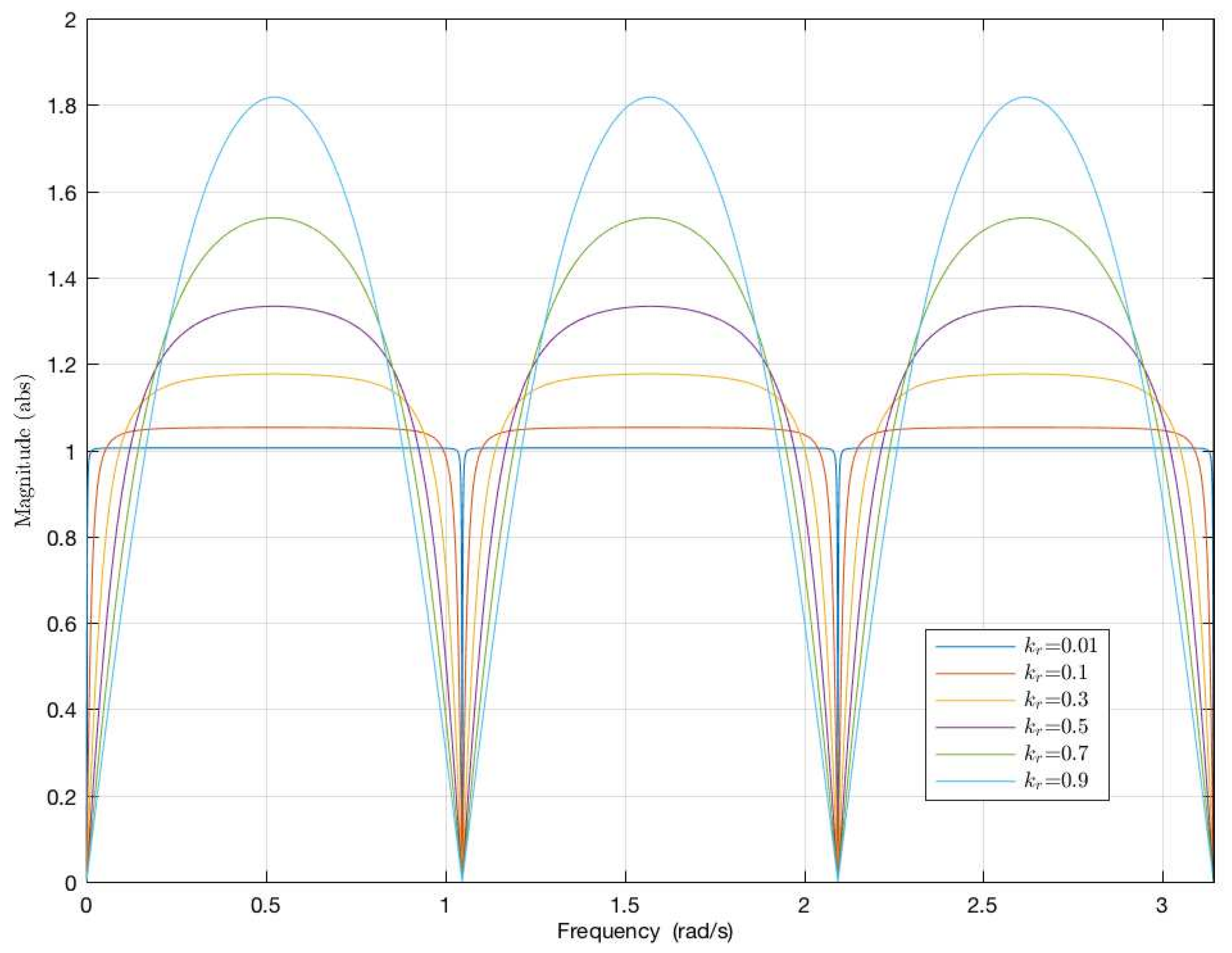
| k | Tuning parameter to define the settling time |
| M | Metabolic rate of a person |
| N | Number of people in the room |
| R(z) | Reference signal |
| RH | Relative humidity |
| t | Indoor air temperature |
| t | Mean radiant temperature |
| T | Outdoor air temperature |
| V | Fan-coil speed (m/s) |
| v | Relative air velocity (m/s) |
| W(z) | Delay function |
| Time constant (s) | |
| HVAC | Heating, Ventilation, and Air Conditioning |
| LTD | Linear Time-Dependent |
| LTI | Linear Time-Invariant |
| MPC | Model-based Predictive Control |
| NZEB | Nearly Zero-Energy Building |
| PI | Proportional–Integral |
| PMV | Predicted Mean Vote |
| PPD | Predicted Percentage Dissatisfied |
| RC | Repetitive control |
| SCADA | Supervisory Control and Data Acquisition |
References
- Berardi, U. Building energy consumption in US, EU, and BRIC countries. Procedia Eng. 2015, 118, 128–136. [Google Scholar] [CrossRef]
- European Comission. Energy Consumption in Buildings. Available online: https://ec.europa.eu/energy/en/topics/energy-efficiency/buildings (accessed on 28 February 2018).
- U.S. Energy Information Administration. Frequently Asked Questions. Available online: http://www.eia.gov/tools/faqs/faq.cfm?id=86&t=1. (accessed on 28 February 2018).
- Al horr, Y.; Arif, M.; Katafygiotou, M.; Mazroei, A.; Kaushik, A.; Elsarrag, E. Impact of indoor environmental quality on occupant well-being and comfort: A review of the literature. Int. J. Sustain. Built Environ. 2016, 5, 1–11. [Google Scholar] [CrossRef]
- 2002/91/CE. Directive 2002/91/CE of the European Parliament and of the Council of 16 December 2002 on the Energy Performance of Buildings. Available online: http://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2003:001:0065:0065:ES:PDF (accessed on 28 February 2018).
- 2009/28/UE. Directive 2009/28/EC of the European Parliament and of the Council of 23 April 2009 on the Promotion of the Use of Energy from Renewable Sources and Amending and Subsequently Repealing Directives 2001/77/EC and 2003/30/EC. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32009L0028&from=EN (accessed on 28 February 2018).
- 2010/31/UE. Directive 2010/31/UE of the European Parliament and of the Council of 19 May 2010 on the Energy Performance of Buildings. Available online: http://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=OJ:L:2010:153:0013:0035:EN:PDF. (accessed on 28 February 2018).
- EN 15251. In Indoor Environmental Input Parameters for Design and Assessment of Energy Performance of Buildings Addressing Indoor Air Quality, Thermal Environment, Lighting and Acoustics; European Committee for Standardisation: London, UK, 2007.
- Feige, A.; Wallbaum, H.; Janser, M.; Windlinger, L. Impact of sustainable office buildings on occupant’s comfort and productivity. J. Corp. Real Estate 2013, 15, 7–34. [Google Scholar] [CrossRef]
- Fisk, W.J. Health and productivity gains from better indoor environments and their relationship with building energy efficiency. Annu. Rev. Energy Environ. 2000, 25, 537–566. [Google Scholar] [CrossRef]
- Kosonen, R.; Tan, F. Assessment of productivity loss in air-conditioned buildings using PMV index. Energy Build. 2004, 36, 987–993. [Google Scholar] [CrossRef]
- Roelofsen, P. The design of the workplace as a strategy for productivity enhancement. In Proceedings of the Proceedings of Clima 2000 Conference, Naples, Italy, 15–18 September 2001. [Google Scholar]
- Andersson, J.; Boerstra, A.; Clements-Croome, D.; Fitzner, K.; Hanssen, S. Indoor Climate and Productivity in Offices; REHVA Guidebook; REHVA: Brussels, Belgium, 2008; Volume 6, ISBN 2-9600468-5-4. [Google Scholar]
- Léger, J.; Rousse, D.R.; Le Borgne, K.; Lassue, S. Comparing electric heating systems at equal thermal comfort: An experimental investigation. Build. Environ. 2018, 128, 161–169. [Google Scholar] [CrossRef]
- Oldewurtel, F.; Parisio, A.; Jones, C.N.; Gyalistras, D.; Gwerder, M.; Stauch, V.; Lehmann, B.; Morari, M. Use of model predictive control and weather forecasts for energy efficient building climate control. Energy Build. 2012, 45, 15–27. [Google Scholar] [CrossRef]
- Zampetti, L.; Arnesano, M.; Revel, G. Experimental testing of a system for the energy-efficient sub-zonal heating management in indoor environments based on PMV. Energy Build. 2018, 166, 229–238. [Google Scholar] [CrossRef]
- Castilla, M.; Álvarez, J.D.; Rodríguez, F.; Berenguel, M. Comfort Control in Buildings; Advances Series in Industrial Control; Springer: Berlin/Heidelberg, Germany, 2014; p. 237. [Google Scholar]
- Pčolka, M.; Žáčeková, E.; Robinett, R.; Čelikovskỳ, S.; Šebek, M. Bridging the gap between the linear and nonlinear predictive control: Adaptations for efficient building climate control. Control Eng. Pract. 2016, 53, 124–138. [Google Scholar] [CrossRef]
- Ascione, F.; Bianco, N.; De Stasio, C.; Mauro, G.M.; Vanoli, G.P. Simulation-based model predictive control by the multi-objective optimization of building energy performance and thermal comfort. Energy Build. 2016, 111, 131–144. [Google Scholar] [CrossRef]
- Ma, J.; Qin, S.J.; Salsbury, T. Application of economic MPC to the energy and demand minimization of a commercial building. J. Process Control 2014, 24, 1282–1291. [Google Scholar] [CrossRef]
- Liang, J.; Ruxu, D. Thermal comfort control based on neural network for HVAC application. In Proceedings of the 2005 IEEE Conference on Control Applications, Toronto, ON, Canada, 28–31 August 2005; pp. 819–824. [Google Scholar]
- Liang, J.; Du, R. Design of intelligent comfort control system with human learning and minimum power control strategies. Energy Convers. Manag. 2008, 49, 517–528. [Google Scholar] [CrossRef]
- Marvuglia, A.; Messineo, A.; Nicolosi, G. Coupling a neural network temperature predictor and a fuzzy logic controller to perform thermal comfort regulation in an office building. Build. Environ. 2014, 72, 287–299. [Google Scholar] [CrossRef]
- Congradac, V.; Kulic, F. HVAC system optimization with CO2 concentration control using genetic algorithms. Energy Build. 2009, 41, 571–577. [Google Scholar] [CrossRef]
- Nassif, N.; Kajl, S.; Sabouring, R. Two-objective online optimization of supervisory control strategy. In Proceedings of the 8th Building Simulation Conference, Eindhoven, The Netherlands, 11–14 August 2003; pp. 927–943. [Google Scholar]
- Guo, W.; Zhou, M. Technologies toward thermal comfort-based and energy-efficient HVAC systems: A review. In Proceedings of the IEEE Conference on Systems, Man, and Cybernetics, San Antonio, TX, USA, 11–14 October 2009; pp. 3883–3888. [Google Scholar]
- Jazizadeh, F.; Ghahramani, A.; Becerik-Gerber, B.; Kichkaylo, T.; Orosz, M. User-led decentralized thermal comfort driven HVAC operations for improved efficiency in office buildings. Energy Build. 2014, 70, 398–410. [Google Scholar] [CrossRef]
- Longman, R.W. Iterative learning control and repetitive control for engineering practice. Int. J. Control 2000, 73, 930–954. [Google Scholar] [CrossRef]
- Tomizuka, M. Dealing with periodic disturbances in controls of mechanical systems. Annu. Rev. Control 2008, 32, 193–199. [Google Scholar] [CrossRef]
- Francis, B.; Wonham, W. Internal Model Principle in Control Theory. Automatica 1976, 12, 457–465. [Google Scholar] [CrossRef]
- Álvarez, J.D.; Costa-Castelló, R.; Castilla, M.; Camacho, E.F. Repetitive control to counteract the effect of people on thermal comfort control. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1187–1191. [Google Scholar]
- Vinther, K.; Chandan, V.; Alleyne, A.G. Learning/repetitive control for building systems with nearly periodic disturbances. In Proceedings of the 2013 European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013; pp. 1198–1203. [Google Scholar]
- Minakais, M.; Okaeme, C.C.; Mishra, S.; Wen, J.T. Iterative Learning Control for coupled temperature and humidity in buildings. In Proceedings of the 20th IFAC World Congress, Toulouse, France, 9–14 July 2017. [Google Scholar]
- Peng, C.; Sun, L.; Tomizuka, M. Constrained Iterative Learning Control with PSO-Youla feedback tuning for building temperature control. IFAC-PapersOnLine 2017, 50, 3135–3141. [Google Scholar] [CrossRef]
- Castilla, M.; Bonilla, J.; Álvarez, J.D.; Rodríguez, F. A room simulation tool for thermal comfort control in a bioclimatic building: A real example of use with an optimal controller. Optim. Control Appl. Methods 2016, 37, 479–495. [Google Scholar] [CrossRef]
- ASHRAE. ASHRAE Handbook—Fundamentals; The American Society of Heating, Refrigerating and Air-Conditioning Engineers: Atlanta, GA, USA, 2017. [Google Scholar]
- ASHRAE55. Thermal Environment Conditions for Human Occupancy; The American Society of Heating, Refrigerating and Air-Conditioning Engineers: Atlanta, GA, USA, 2017. [Google Scholar]
- ISO7730. Ergonomics of the Thermal Environment: Analytical Determination and Interpretation of Thermal Comfort Using Calculation of the PMV and PPD Indices and Local Thermal Comfort; International Standardization Organization: Geneva, Switzerland, 2005. [Google Scholar]
- Fanger, P.O. Assessment of man’s thermal comfort in practice. Br. J. Ind. Med. 1973, 30, 313–324. [Google Scholar] [CrossRef] [PubMed]
- D’Ambrosio Alfano, F.R.; Olesen, B.W.; Palella, B.I. Povl Ole Fanger’s Impact Ten Years Later. Energy Build. 2017, 152, 243–249. [Google Scholar] [CrossRef]
- D’Ambrosio Alfano, F.R.; Olesen, B.W.; Palella, B.I.; Riccio, G. Thermal Comfort: Design and Assessment for Energy Saving. Energy Build. 2014, 81, 326–336. [Google Scholar] [CrossRef]
- D’Ambrosio Alfano, F.R.; Palella, B.I.; Riccio, G. Notes on the Calculation of the PMV index by means of Apps. Energy Procedia 2016, 101, 249–256. [Google Scholar] [CrossRef]
- Oliveira, A.V.M.; Gaspar, A.R.; Raimundo, A.M.; Quintela, D.A. On the measurement of globe temperatures: Analysis of the influence of different parameters. Extrem. Physiol. Med. 2015, 4, A14. [Google Scholar] [CrossRef][Green Version]
- Quintela, D.A.; Gaspar, A.R.; Raimundo, A.M.; Oliveira, A.V.M.; Cardoso, D. Assessment of the performance of globe thermometers under different environmental conditions. In Occupational Safety and Hygiene II. Selected Extended and Revises Contributions from the International Symposium Occupational Safety and Hygiene; Taylor & Francis: London, UK, 2014; Volume 1, pp. 523–528. [Google Scholar]
- ISO 7726. Ergonomics of the Thermal Environment—Instruments for Measuring Physical Quantities; International Standardization Organization: Geneva, Switzerland, 1998. [Google Scholar]
- Costa-Castello, R.; Nebot, J.; Griñó, R. Demonstration of the Internal Model Principle by Digital Repetitive Control of an Educational Laboratory Plant. IEEE Trans. Educ. 2005, 48, 73–80. [Google Scholar] [CrossRef]
- Ramos, G.A.; Costa-Castelló, R. Power factor correction and harmonic compensation using second-order odd-harmonic repetitive control. IET Control Theory Appl. 2012, 6, 1–12. [Google Scholar] [CrossRef]
- Inoue, T.; Nakano, M.; Kubo, T.; Matsumoto, S.; Baba, H. High Accuracy Control of a Proton Synchroton Magnet Power Supply. In Proceedings of the 8th IFAC World Congress, Kyoto, Japan, 24–28 August 1981; pp. 216–220. [Google Scholar]
- Camacho, E.F.; Alba, C.B. Model Predictive Control; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar]











© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez, J.D.; Costa-Castelló, R.; Castilla, M.D.M. Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings. Energies 2018, 11, 976. https://doi.org/10.3390/en11040976
Álvarez JD, Costa-Castelló R, Castilla MDM. Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings. Energies. 2018; 11(4):976. https://doi.org/10.3390/en11040976
Chicago/Turabian StyleÁlvarez, José Domingo, Ramon Costa-Castelló, and María Del Mar Castilla. 2018. "Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings" Energies 11, no. 4: 976. https://doi.org/10.3390/en11040976
APA StyleÁlvarez, J. D., Costa-Castelló, R., & Castilla, M. D. M. (2018). Repetitive Control to Improve Users’ Thermal Comfort and Energy Efficiency in Buildings. Energies, 11(4), 976. https://doi.org/10.3390/en11040976