A Distributed Secondary Control Algorithm for Automatic Generation Control Considering EDP and Automatic Voltage Control in an AC Microgrid


 ,
, 
Abstract
:1. Introduction
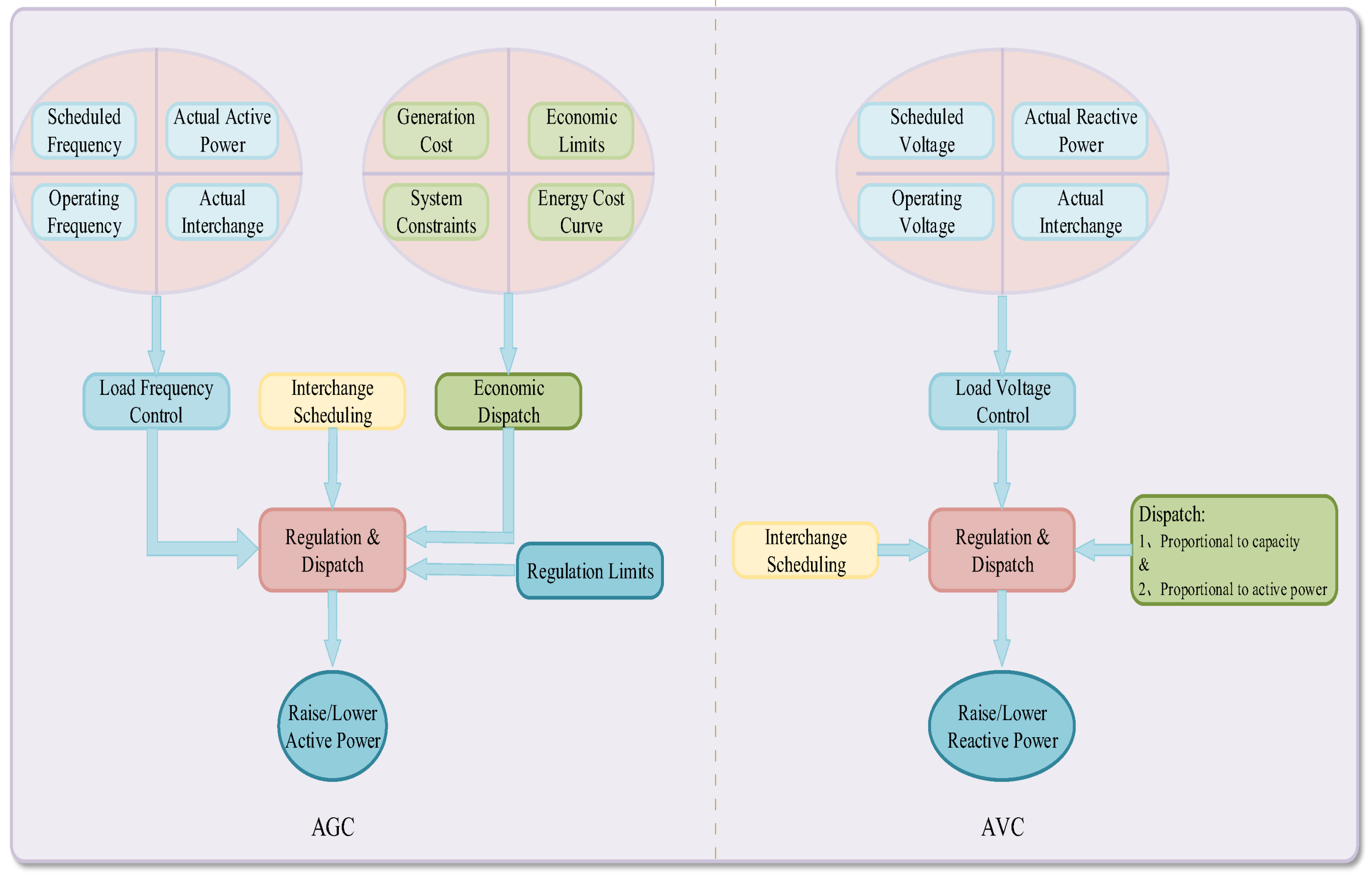
2. Control Structure and Control Objects for Microgrids
- Voltage synchronization:where Vi and Vj are the real output voltages of the i-th and j-th DGs, correspondingly, and VPCC and VMainGrid are the voltages of the point of common coupling (PCC) and the main grid, respectively.
- Frequency synchronization:where fi and fj are the frequencies of the i-th and j-th DGs, correspondingly, and θPCC and θMaingrid are the phase angles [rad] of the PCC and the main grid, respectively.
3. Design of a Distributed Secondary Control Algorithm for the AGC/AVC and EDP Problems
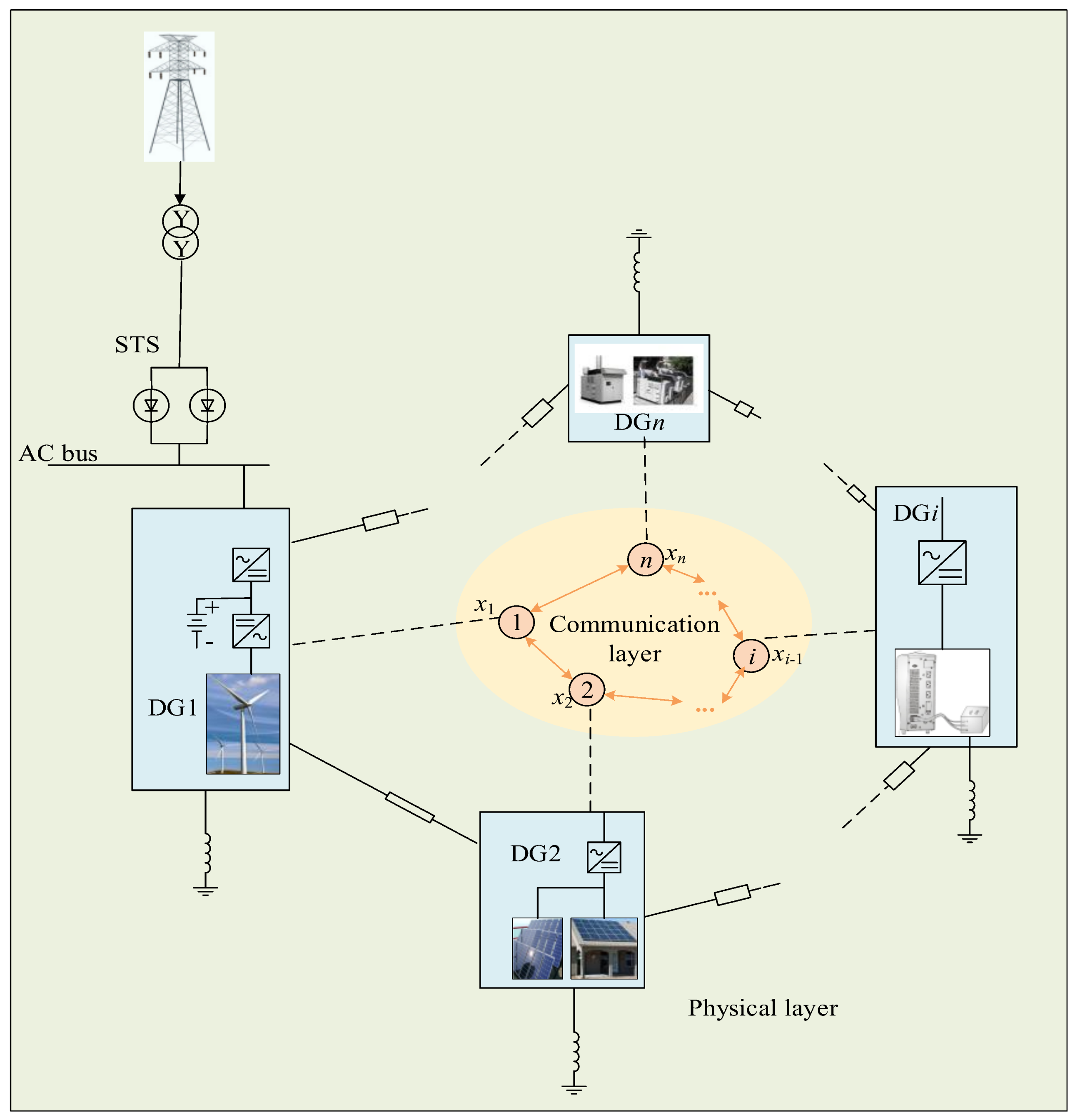
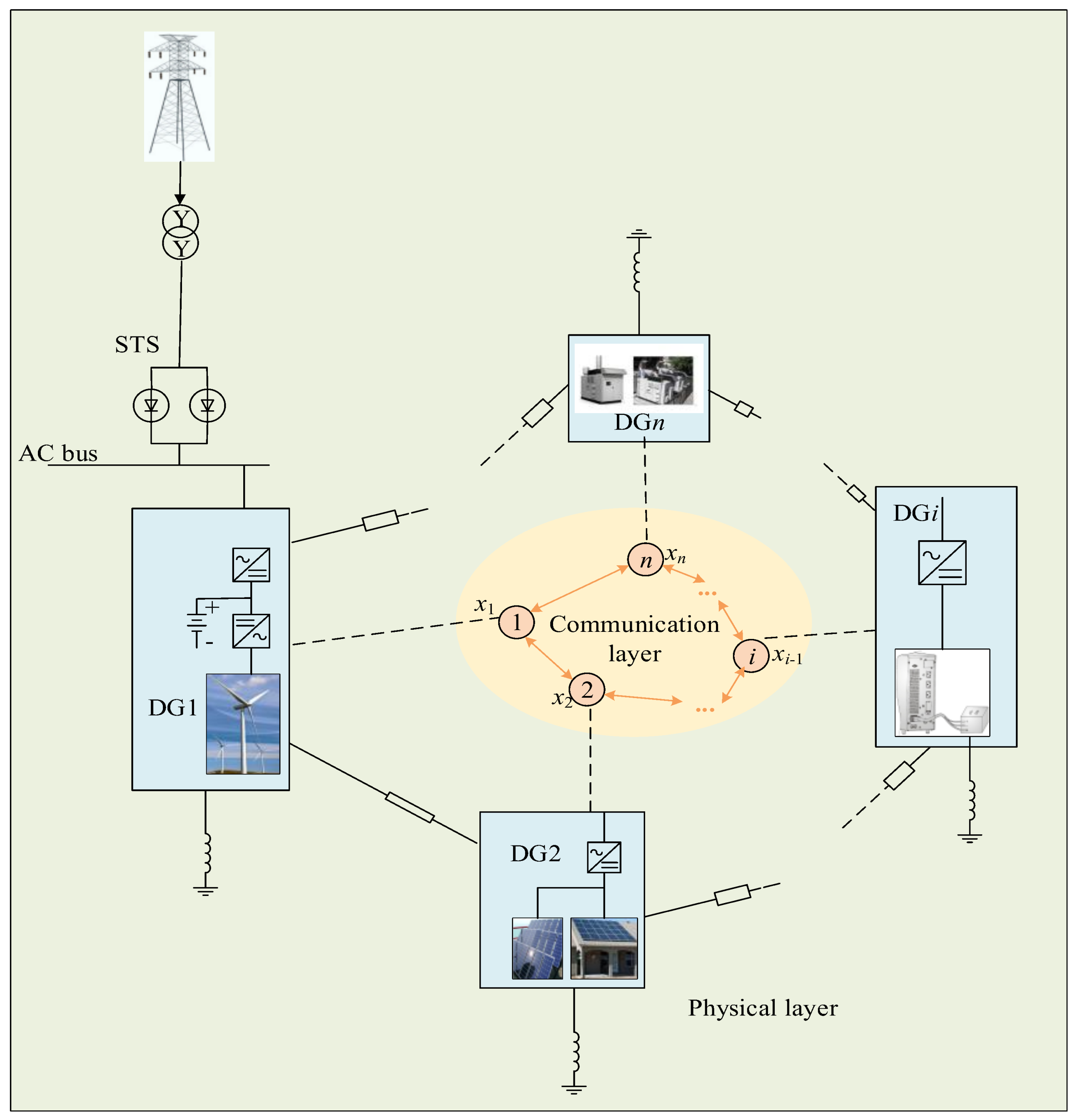
3.1. Microgrid Structure Wirh Communication Network
3.2. Distributed Voltage-Frequency Recovery and Synchronization for AGC/AVC
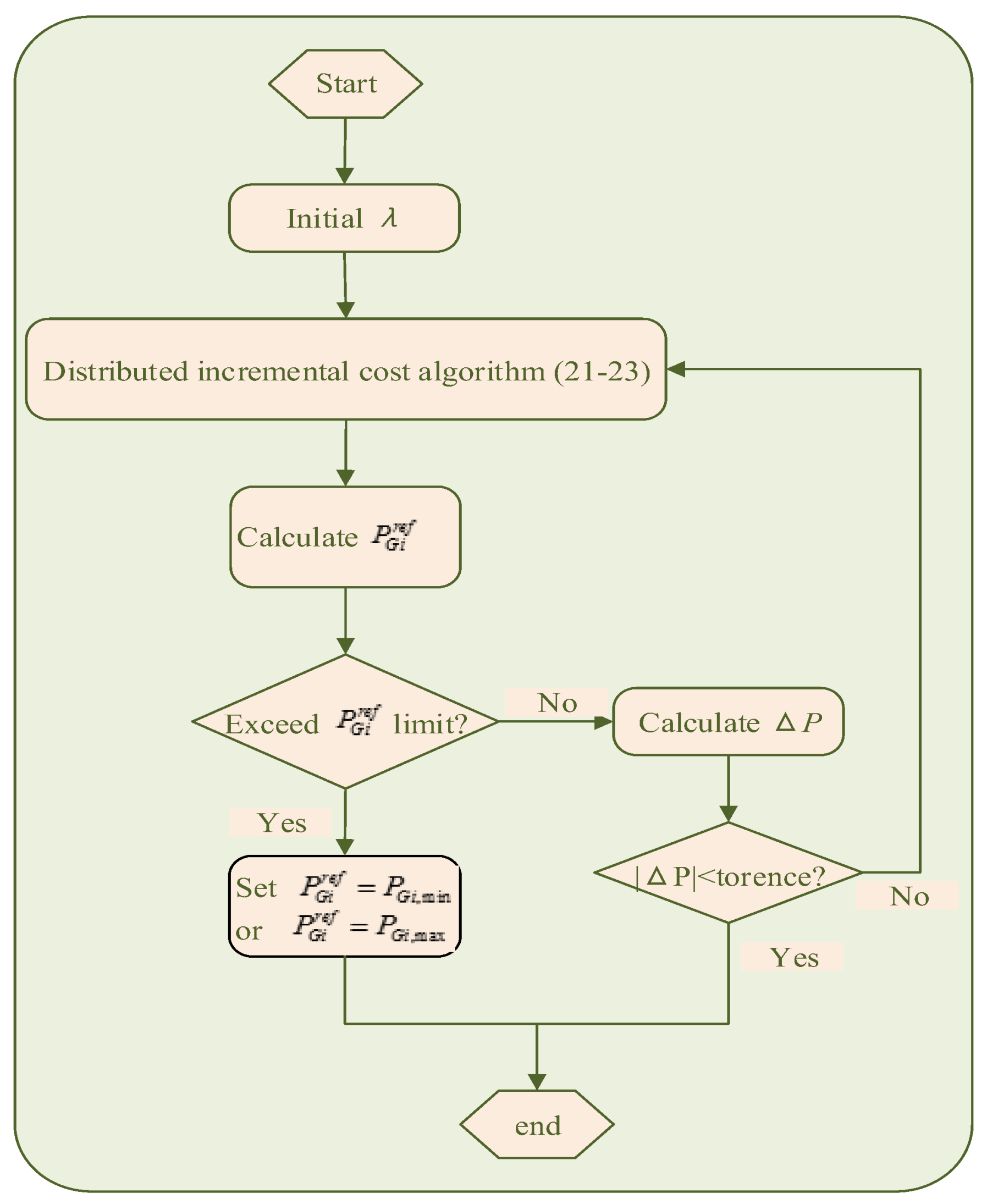
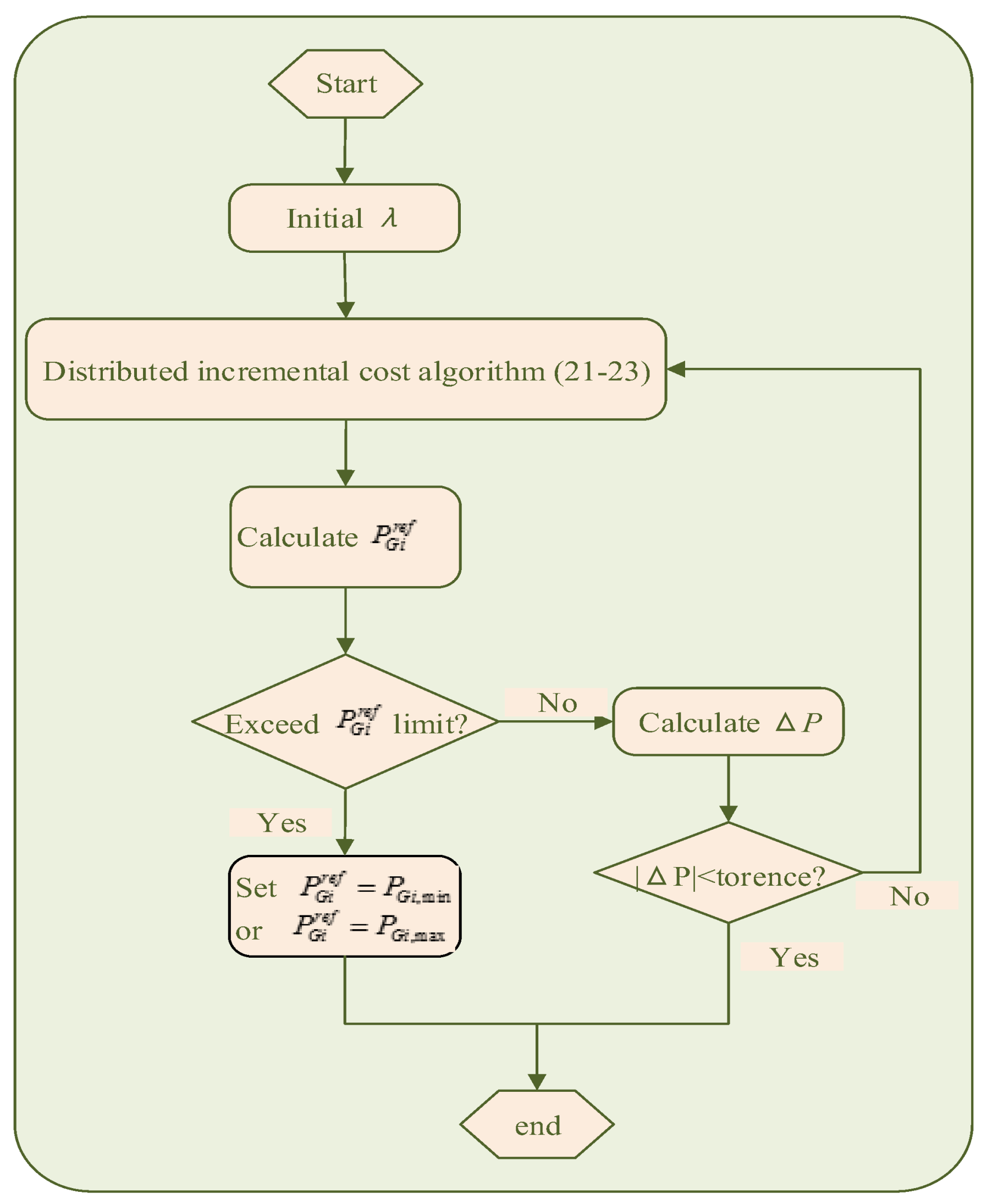
3.3. Distributed Algorithm to Solve EDP for AGC
3.3.1. Without Consideration of Capacity Constraints
3.3.2. Capacity Constraints Considered
3.3.3. Load Demand Estimator
3.3.4. Droop Coefficients Design
4. Simulation
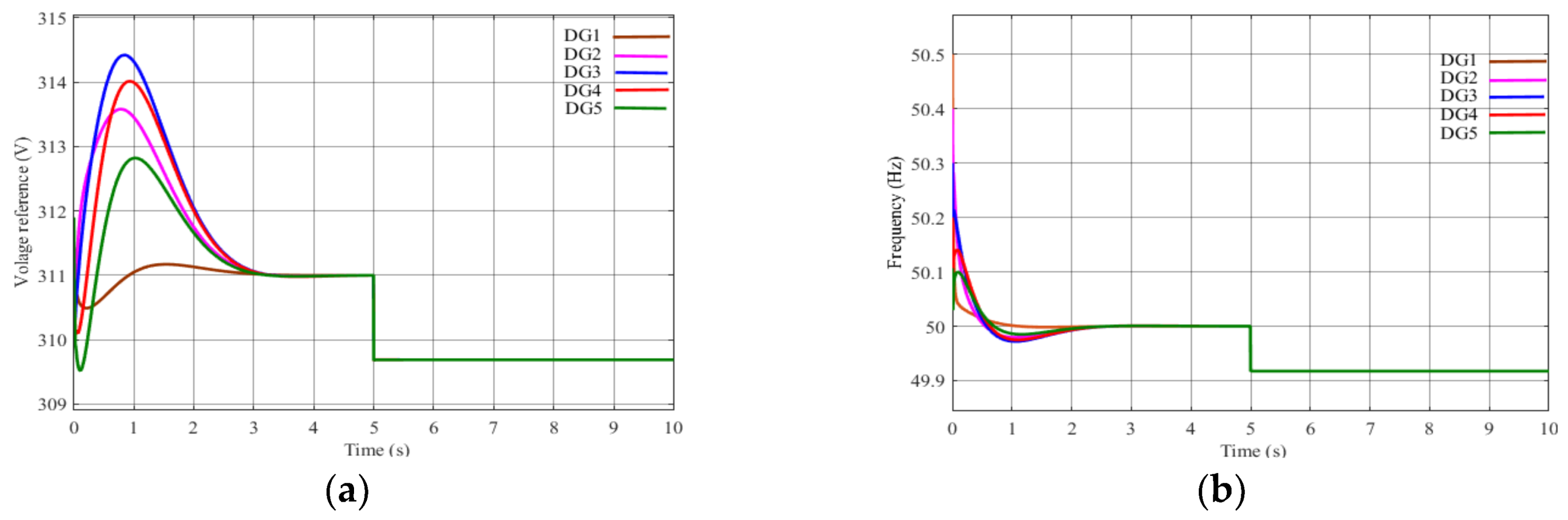
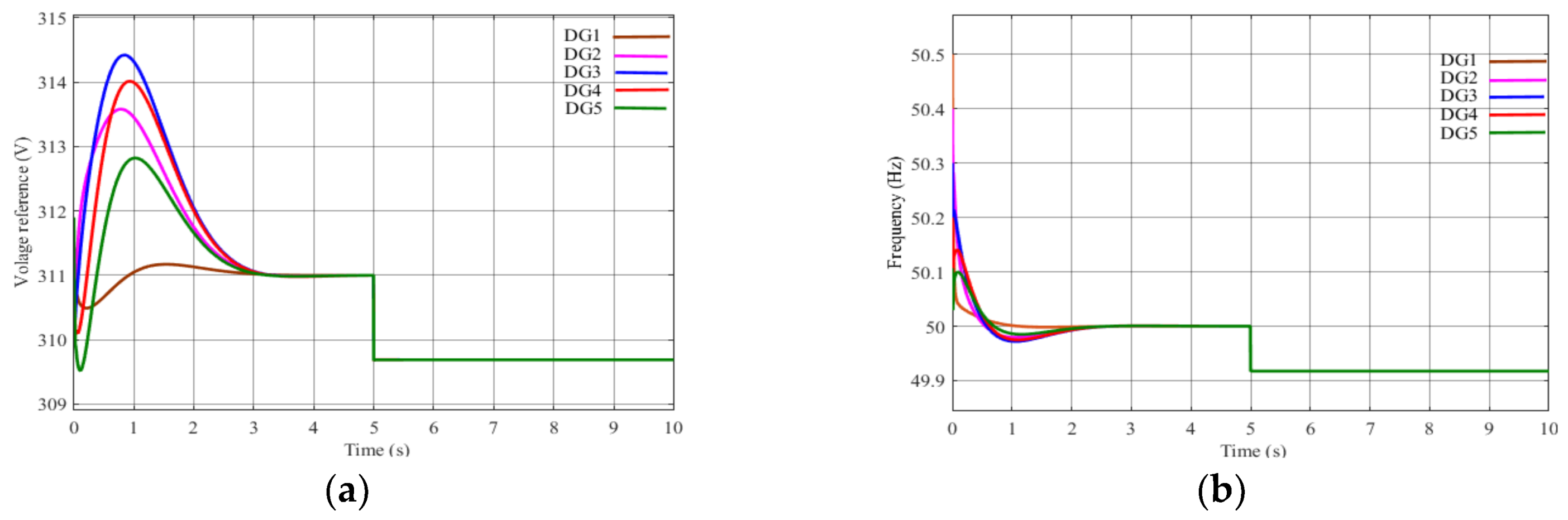
4.1. Case 1: Simulation Results of Voltage and Frequency Recovery and Synchronization
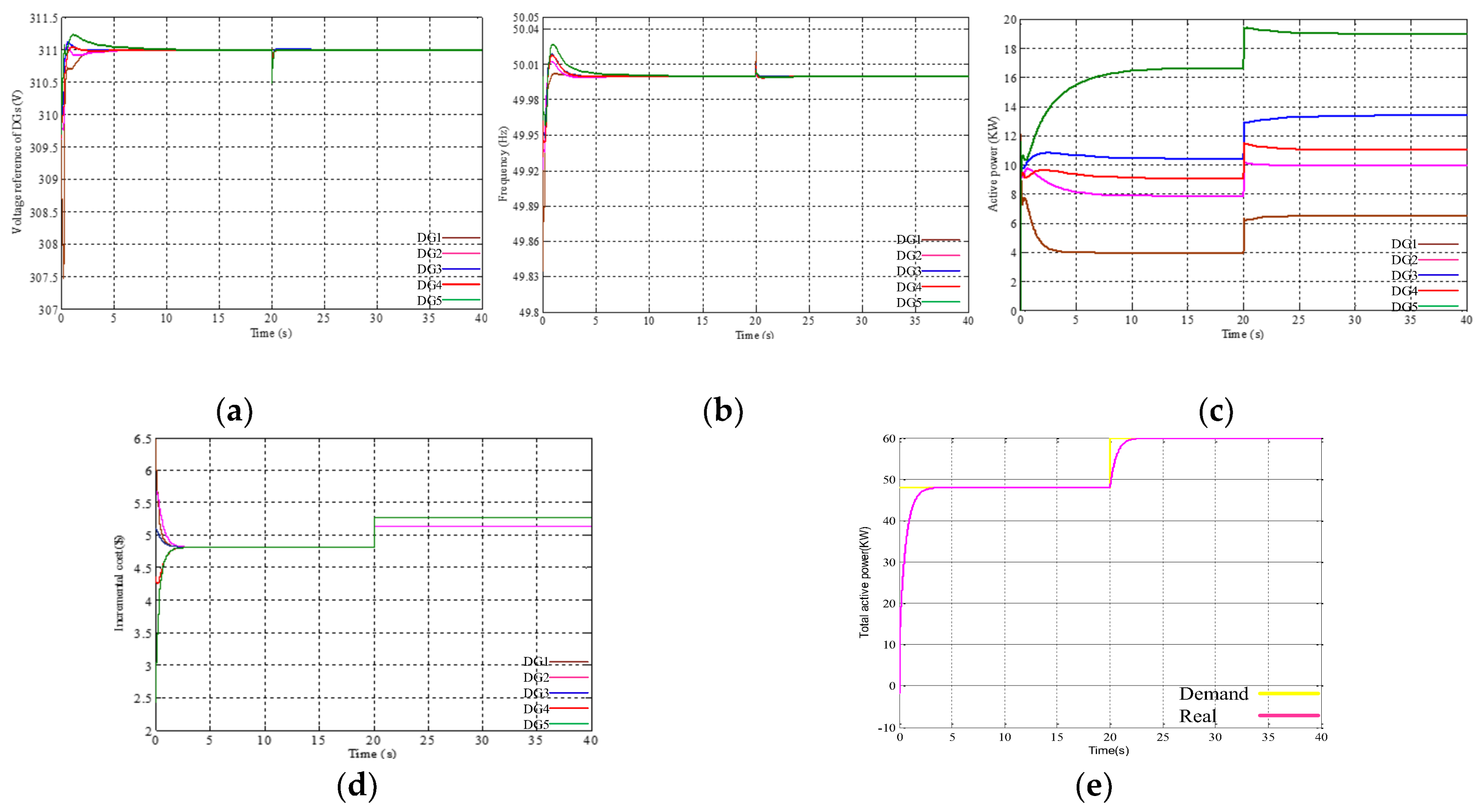
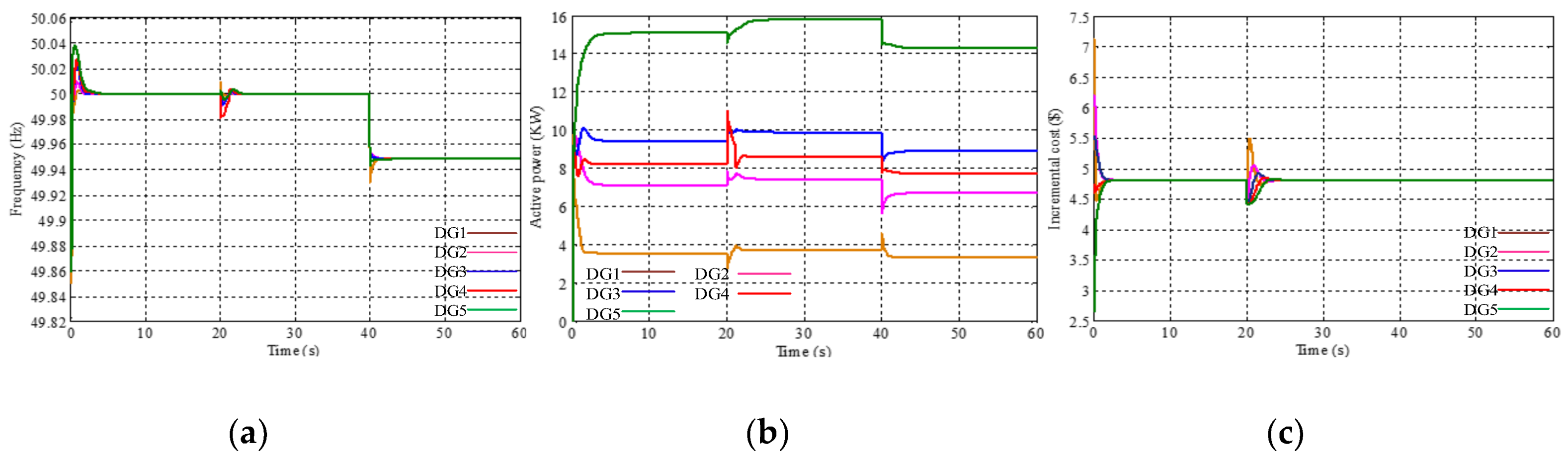
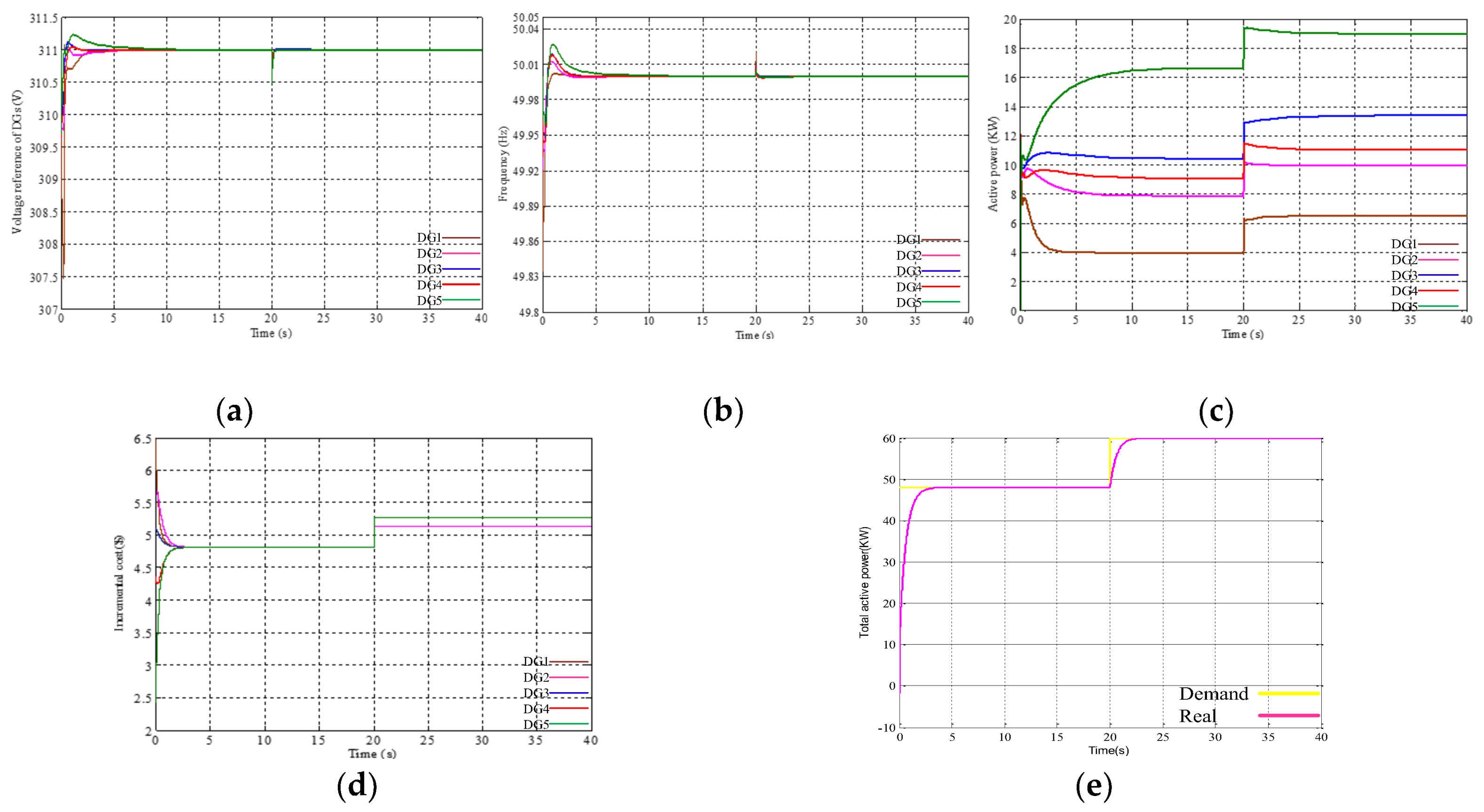
4.2. Case 2: Simulation Results with Load Changing
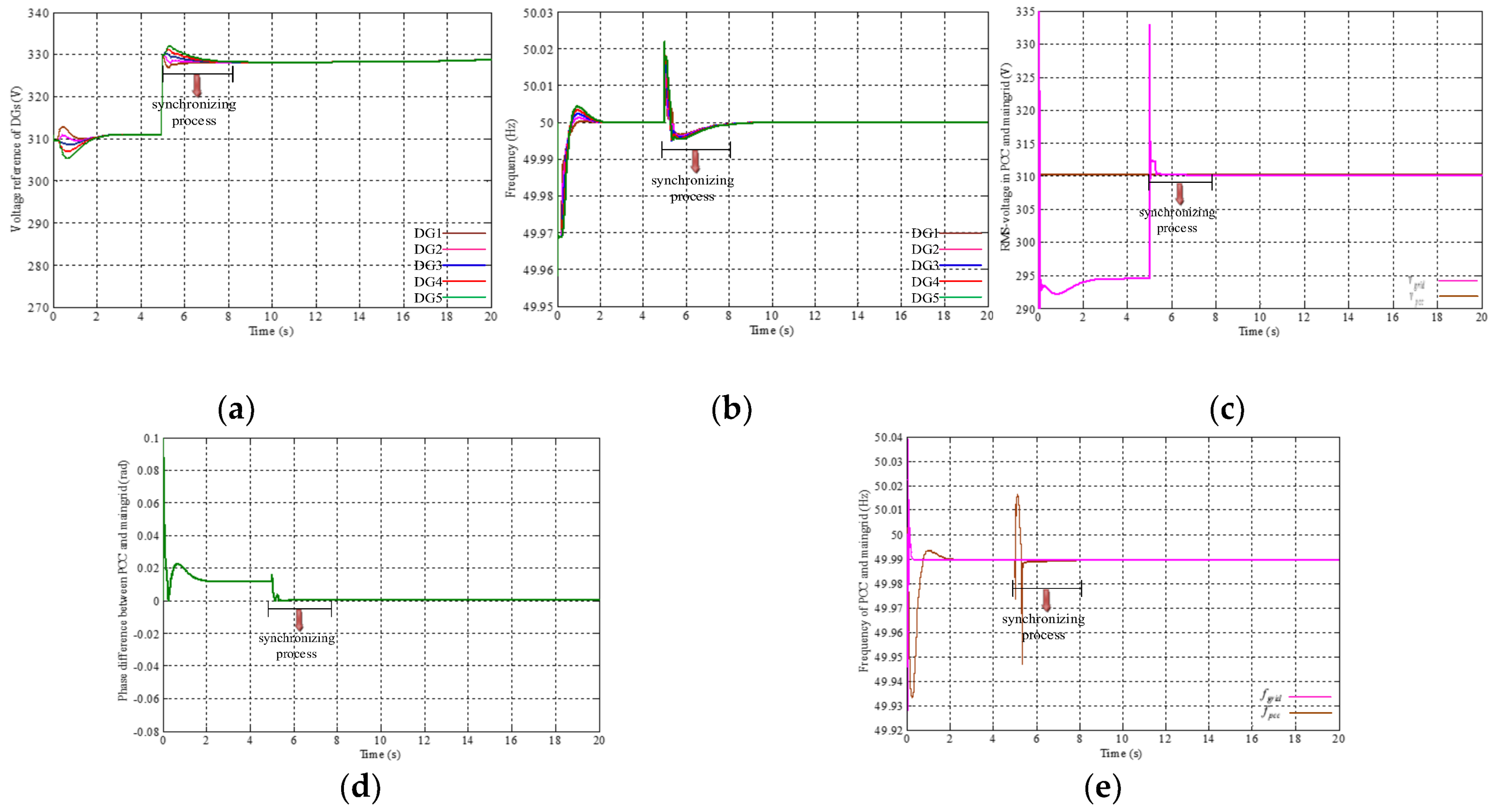
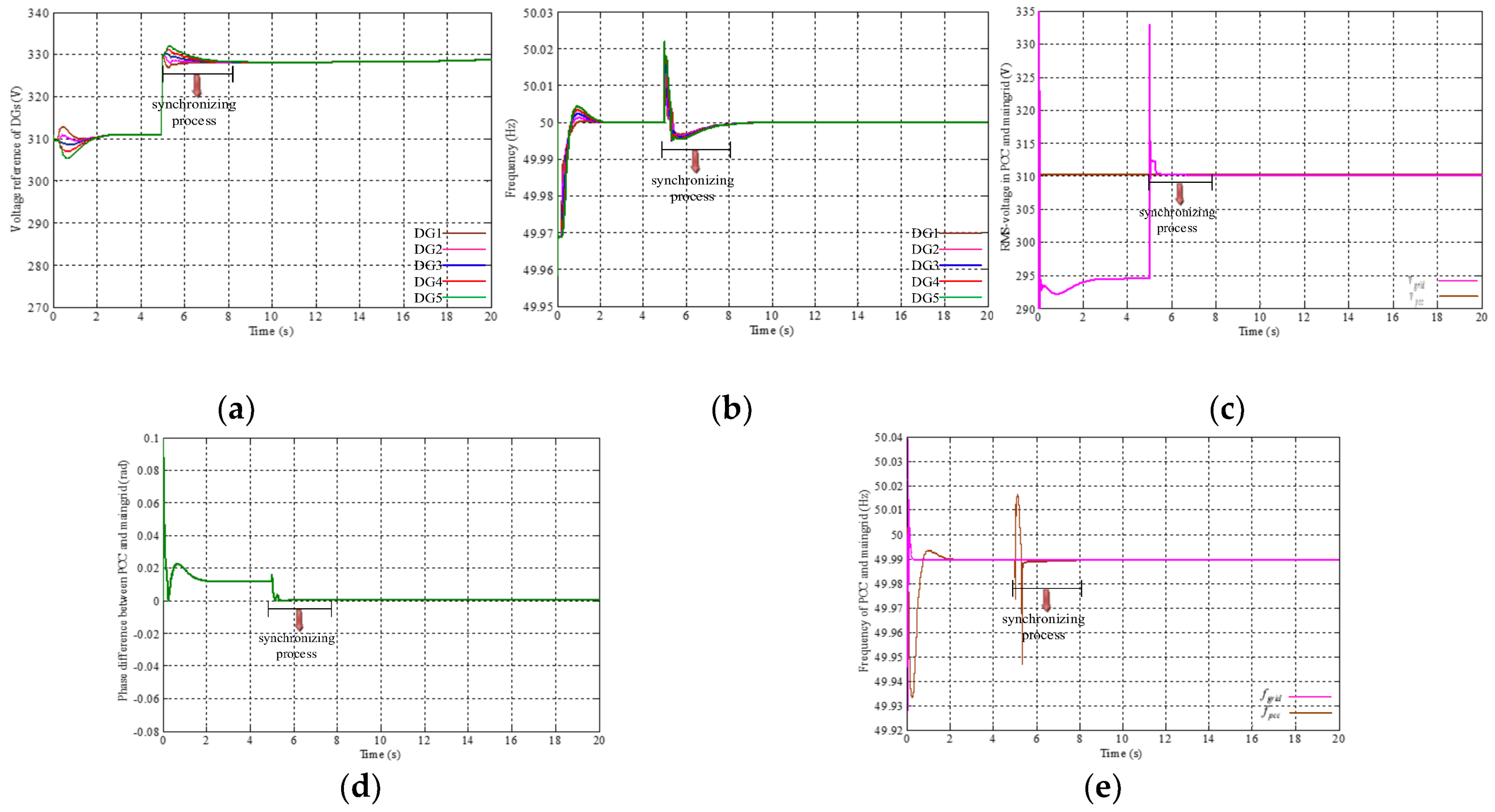
4.3. Case 3: Simulation Results of Seamless Handover from the Islanded Mode to the Grid-Connected Mode
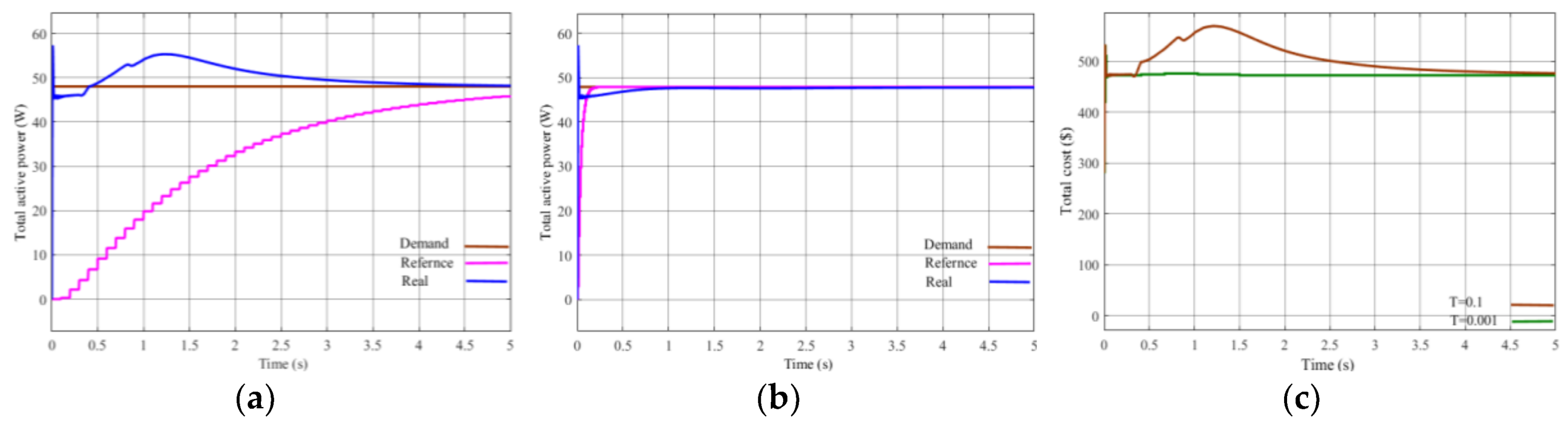
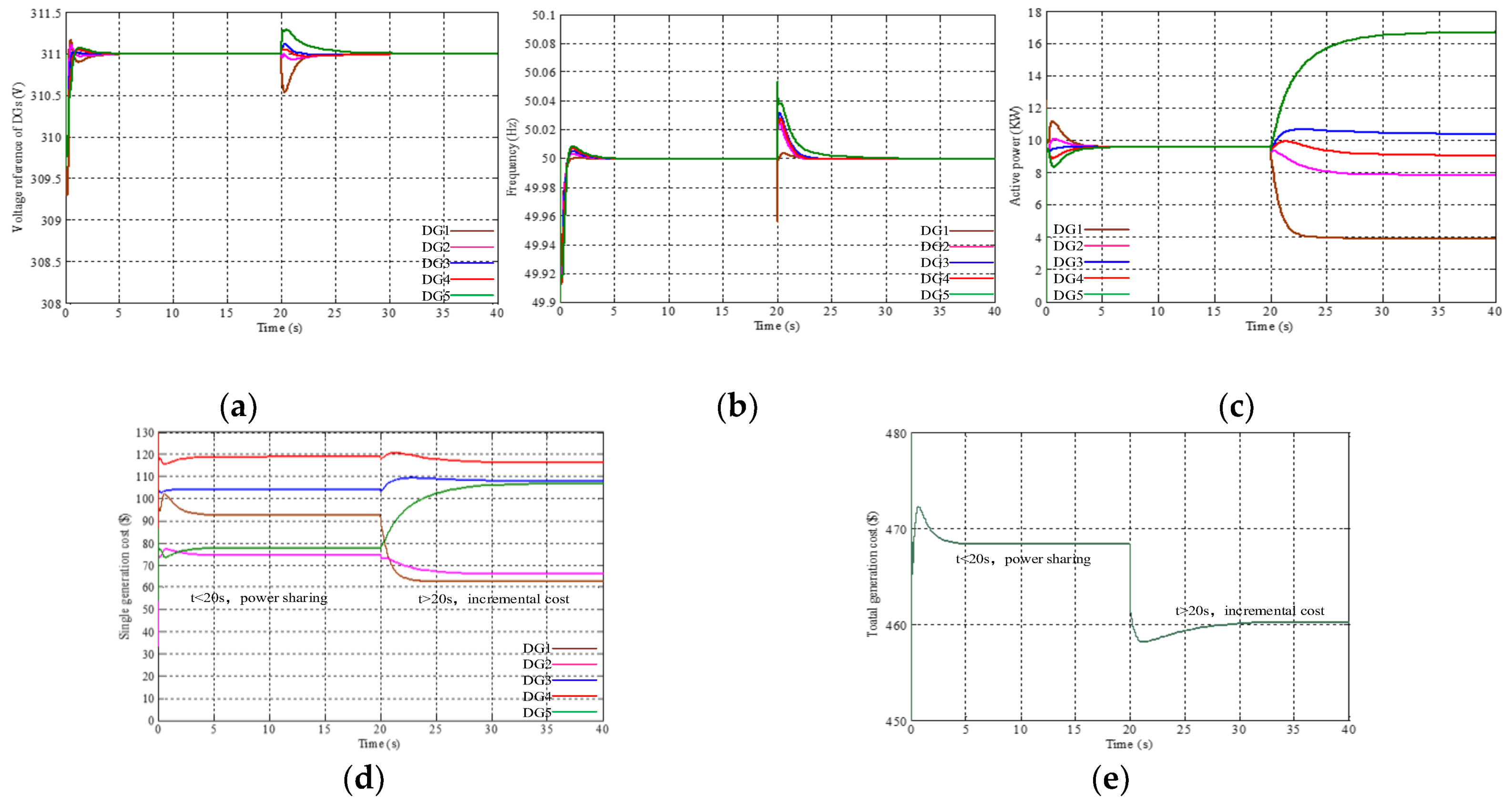
4.4. Case 4: Cost Comparison for Different Control Strategy
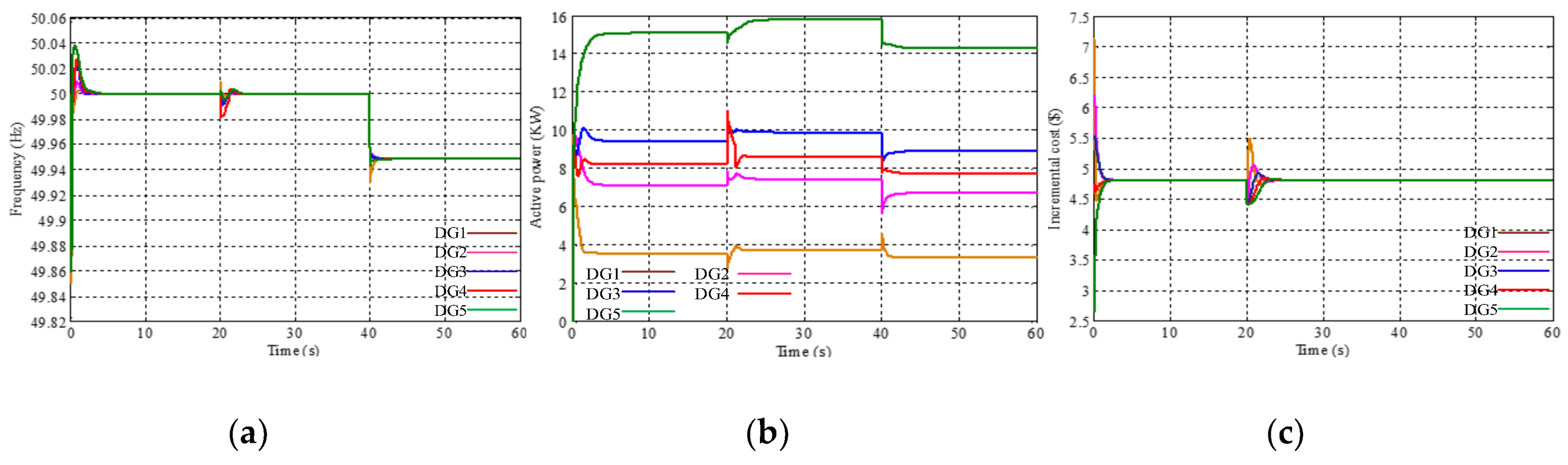
4.5. Case 5: Simulation Results with Communication Failure
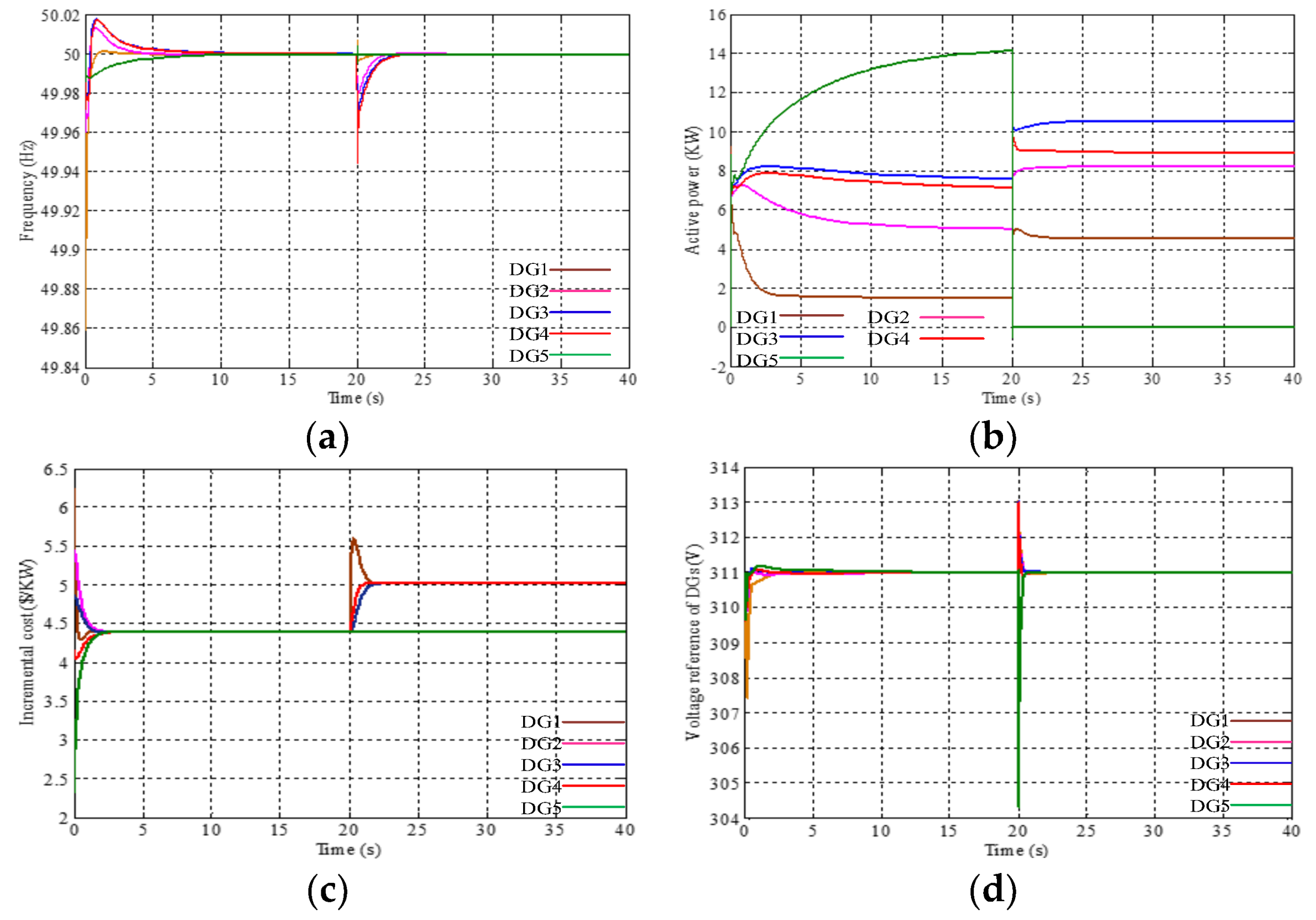
4.6. Case 6: Simulation Results of Plug-and-Play Function
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Keyhani, A.; Marwali, M. Smart Power Grids, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2011; pp. 25–27. [Google Scholar]
- Song, D.; Yang, J.; Fan, X.; Liu, Y.; Liu, A.; Chen, G.; Joo, Y.H. Maximum power extraction for wind turbines through a novel yaw control solution using predicted wind directions. Energy Convers. Manag. 2018, 157, 587–599. [Google Scholar] [CrossRef]
- Song, D.; Yang, J.; Cai, Z.; Dong, M.; Joo, Y.H. Model predictive control with finite control set for variable-speed wind turbines. Energy 2017, 126, 564–572. [Google Scholar] [CrossRef]
- Liang, H.; Zhuang, W. Stochastic Modeling and Optimization in a Microgrid: A Survey. Energies 2014, 7, 2027–2050. [Google Scholar] [CrossRef]
- Han, H.; Hou, X.; Yang, J.; Wu, J.; Su, M.; Guerrero, J.M. Review of power sharing control strategies for islanding operation of AC microgrids. IEEE Trans. Smart Grid 2016, 7, 200–215. [Google Scholar] [CrossRef]
- Qiu, J.; Zhao, J.; Wang, D.; Zheng, Y. Two-Stage Coordinated Operational Strategy for Distributed Energy Resources Considering Wind Power Curtailment Penalty Cost. Energies 2017, 10, 965. [Google Scholar] [CrossRef]
- Palizban, O.; Kauhaniemi, K. Hierarchical control structure in microgrids with distributed generation: Island and grid-connected mode. Renew. Sustain. Energy Rev. 2015, 44, 797–813. [Google Scholar] [CrossRef]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H.; Li, S. Fully distributed hierarchical control of parallel grid-supporting inverters in islanded AC microgrids. IEEE Trans. Ind. Inform. 2018, 14, 679–690. [Google Scholar] [CrossRef]
- Zhao, Z.; Yang, P.; Guerrero, J.M.; Xu, Z.; Green, T.C. Multiple-Time-Scales Hierarchical Frequency Stability Control Strategy of Medium-Voltage Isolated Microgrid. IEEE Trans. Power Electron. 2016, 31, 5974–5991. [Google Scholar] [CrossRef]
- Xiao, Z.; Li, T.; Huang, M.; Shi, J.; Yang, J.; Yu, J.; Wu, W. Hierarchical MAS Based Control Strategy for Microgrid. Energies 2010, 3, 1622–1638. [Google Scholar] [CrossRef]
- D’Arco, S.; Suul, J.A. Equivalence of virtual synchronous machines and frequency-droops for converter-based microgrids. IEEE Trans. Smart Grid 2014, 5, 394–395. [Google Scholar] [CrossRef]
- Sun, Y.; Hou, X.; Yang, J.; Han, H.; Su, M.; Guerrero, J.M. New Perspectives on Droop Control in AC Microgrid. IEEE Trans. Ind. Electron. 2017, 64, 5741–5745. [Google Scholar] [CrossRef]
- Lu, Q.; Hu, W.; Zheng, L.; Min, Y.; Li, M.; Li, X.; Ge, W.; Wang, Z. Integrated Coordinated Optimization Control of Automatic Generation Control and Automatic Voltage Control in Regional Power Grids. Energies 2012, 5, 3817–3834. [Google Scholar] [CrossRef]
- Lopes, J.A.P.; Moreira, C.L.; Madureira, A.G. Defining control strategies for microgrids islanded operation. IEEE Trans. Power Syst. 2006, 21, 916–924. [Google Scholar] [CrossRef]
- Shafiee, Q.; Guerrero, J.M.; Vasquez, J. Distributed Secondary Control for Islanded Microgrids—A Novel Approach. IEEE Trans. Power Electron. 2014, 29, 1018–1031. [Google Scholar] [CrossRef]
- Guo, F.; Wen, C.; Mao, J.; Song, Y.D. Distributed secondary voltage and frequency restoration control of droop-controlled inverter-based microgrids. IEEE Trans. Ind. Electron. 2015, 62, 4355–4364. [Google Scholar] [CrossRef]
- Rokrok, E.; Shafie-khah, M.; Siano, P.; Catalão, J.P.S. A Decentralized Multi-Agent-Based Approach for Low Voltage Microgrid Restoration. Energies 2017, 10, 1491. [Google Scholar] [CrossRef]
- Pilloni, A.; Pisano, A.; Usai, E. Robust Finite-Time Frequency and Voltage Restoration of Inverter-Based Microgrids via Sliding-Mode Cooperative Control. IEEE Trans. Ind. Electron. 2018, 65, 907–917. [Google Scholar] [CrossRef]
- Tan, K.; Peng, X.; So, P.; Chu, Y.; Chen, M. Centralized control for parallel operation of distributed generation inverters in microgrids. IEEE Trans. Smart Grid 2012, 3, 1977–1987. [Google Scholar] [CrossRef] [Green Version]
- Ahn, C.; Peng, H. Decentralized and real-time power dispatch control for an islanded microgrid supported by distributed power sources. Energies 2013, 6, 6439–6454. [Google Scholar] [CrossRef]
- Yan, B.; Wang, B.; Zhu, L.; Liu, H.; Liu, Y.; Ji, X.; Liu, D. A novel, stable, and economic power sharing scheme for an autonomous microgrid in the energy internet. Energies 2015, 8, 12741–12764. [Google Scholar] [CrossRef]
- Han, H.; Li, L.; Wang, L.; Su, M.; Zhao, Y.; Guerrero, J.M. A Novel Decentralized Economic Operation in Islanded AC Microgrids. Energies 2017, 10, 804. [Google Scholar] [CrossRef]
- Zhang, Z.; Chow, M.-Y. Convergence analysis of the incremental cost consensus algorithm under different communication network topologies in a smart grid. IEEE Trans. Power Syst. 2012, 27, 1761–1768. [Google Scholar] [CrossRef]
- Chen, G.; Lewis, F.L.; Feng, E.N.; Song, Y. Distributed optimal active power control of multiple generation systems. IEEE Trans. Ind. Electron. 2015, 62, 7079–7090. [Google Scholar] [CrossRef]
- Yang, Z.; Xiang, J.; Li, Y. Distributed Consensus Based Supply–Demand Balance Algorithm for Economic Dispatch Problem in a Smart Grid with Switching Graph. IEEE Trans. Ind. Electron. 2017, 64, 1600–1610. [Google Scholar] [CrossRef]
- Jalilzadeh Hamidia, R.; Livania, H.; Hosseinianb, S.H.; Gharehpetianb, G.B. Distributed cooperative control system for smart microgrids. Electr. Power Syst. Res. 2016, 130, 241–250. [Google Scholar] [CrossRef]
- Mashhour, E.; Moghaddas-Tafreshi, S.M. Bidding strategy of virtual power plant for participating in energy and spinning reserve markets—Part I: Problem formulation. IEEE Trans. Power Syst. 2011, 26, 949–956. [Google Scholar] [CrossRef]
- Gozde, H.; Taplamacioglu, M.E. Automatic generation control application with craziness based particle swarm optimization in a thermal power system. Int. J. Electr. Power Energy Syst. 2011, 33, 8–16. [Google Scholar] [CrossRef]
- Liu, Z.; Su, M.; Sun, Y.; Han, H.; Hou, X.; Guerrero, J.M. Stability analysis of DC microgrids with constant power load under distributed control methods. Automatica 2018, 90, 62–72. [Google Scholar] [CrossRef]
- Xin, H.; Lu, Z.; Qu, Z.; Gan, D.; Qi, D. Cooperative control strategy for multiple photovoltaic generators in distribution networks. IET Control Theory Appl. 2011, 5, 1617–1629. [Google Scholar] [CrossRef]
- Sun, Y.; Zhong, C.; Hou, X.; Yang, J.; Han, H.; Guerrero, J.M. Distributed cooperative synchronization strategy for multi-bus microgrids. Electr. Power Energy Syst. 2017, 86, 18–28. [Google Scholar] [CrossRef]
- Nasirian, V.; Davoudi, A.; Lewis, F. Distributed adaptive droop control for DC distribution system. IEEE Trans. Energy Convers. 2014, 29, 944–956. [Google Scholar] [CrossRef]
- Han, H.; Wang, H.; Sun, Y.; Yang, J.; Liu, Z. Distributed control scheme on cost optimisation under communication delays for DC microgrids. IET Gener. Trans. Distrib. 2017, 11, 4193–4201. [Google Scholar] [CrossRef]
- Li, Z.; Duan, Z.; Chen, G.; Huang, L. Consensus of multiagent systems and synchronization of complex networks: A unified viewpoint. IEEE Trans. Circuits Syst. I 2010, 57, 213–224. [Google Scholar]
- Chatterjee, S.; Kumar, P.; Chatterjee, S. A techno-commercial review on grid connected photovoltaic system. Renew. Sustain. Energy Rev. 2018, 81, 2371–2397. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Parameters | DG1–5 |
|---|---|---|
| P-f droop coefficient | mref | 10−5 (Hz/W) |
| Q-V droop coefficient | nref | 10−3 (V/Var) |
| Voltage deviation proportional term | kpvs | 10 |
| Voltage deviation integral term | kivs | 0.1 |
| Frequency deviation proportional term | kpfs | 5 |
| Frequency deviation integral term | kifs | 0.1 |
| Power deviation proportional term | kpps | 0.05 |
| Distributed cooperative voltage gain | kv | 150 |
| Distributed cooperative frequency gain | kf | 5 |
| Distributed cooperative incremental gain | kλ | 5 |
| Voltage proportional term | kpv | 0.0015 |
| Voltage integral term | kiv | 4 |
| Current proportional term | kpi | 4 |
| Unit | Coefficient of Cost Function | Pimin (KW) | Pimax (KW) | ||
|---|---|---|---|---|---|
| αi | βi | γi | |||
| DG1 | 0.087 | 4.13 | 45 | 0 | 10 |
| DG2 | 0.076 | 3.62 | 33 | 0 | 10 |
| DG3 | 0.075 | 3.25 | 66 | 0 | 15 |
| DG4 | 0.112 | 2.78 | 82 | 0 | 20 |
| DG5 | 0.098 | 1.54 | 54 | 0 | 40 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, M.; Li, L.; Wang, L.; Song, D.; Liu, Z.; Tian, X.; Li, Z.; Wang, Y. A Distributed Secondary Control Algorithm for Automatic Generation Control Considering EDP and Automatic Voltage Control in an AC Microgrid. Energies 2018, 11, 932. https://doi.org/10.3390/en11040932
Dong M, Li L, Wang L, Song D, Liu Z, Tian X, Li Z, Wang Y. A Distributed Secondary Control Algorithm for Automatic Generation Control Considering EDP and Automatic Voltage Control in an AC Microgrid. Energies. 2018; 11(4):932. https://doi.org/10.3390/en11040932
Chicago/Turabian StyleDong, Mi, Li Li, Lina Wang, Dongran Song, Zhangjie Liu, Xiaoyu Tian, Zhengguo Li, and Yinghua Wang. 2018. "A Distributed Secondary Control Algorithm for Automatic Generation Control Considering EDP and Automatic Voltage Control in an AC Microgrid" Energies 11, no. 4: 932. https://doi.org/10.3390/en11040932
APA StyleDong, M., Li, L., Wang, L., Song, D., Liu, Z., Tian, X., Li, Z., & Wang, Y. (2018). A Distributed Secondary Control Algorithm for Automatic Generation Control Considering EDP and Automatic Voltage Control in an AC Microgrid. Energies, 11(4), 932. https://doi.org/10.3390/en11040932