1. Introduction
As concern for environmental pollution and climate change grows, new energy-efficient vehicles, and in particular electric vehicles, have gained more and more attention. Electrified powertrains make decentralized driving systems possible, among which the in-wheel motors (IWM) are one important technology [
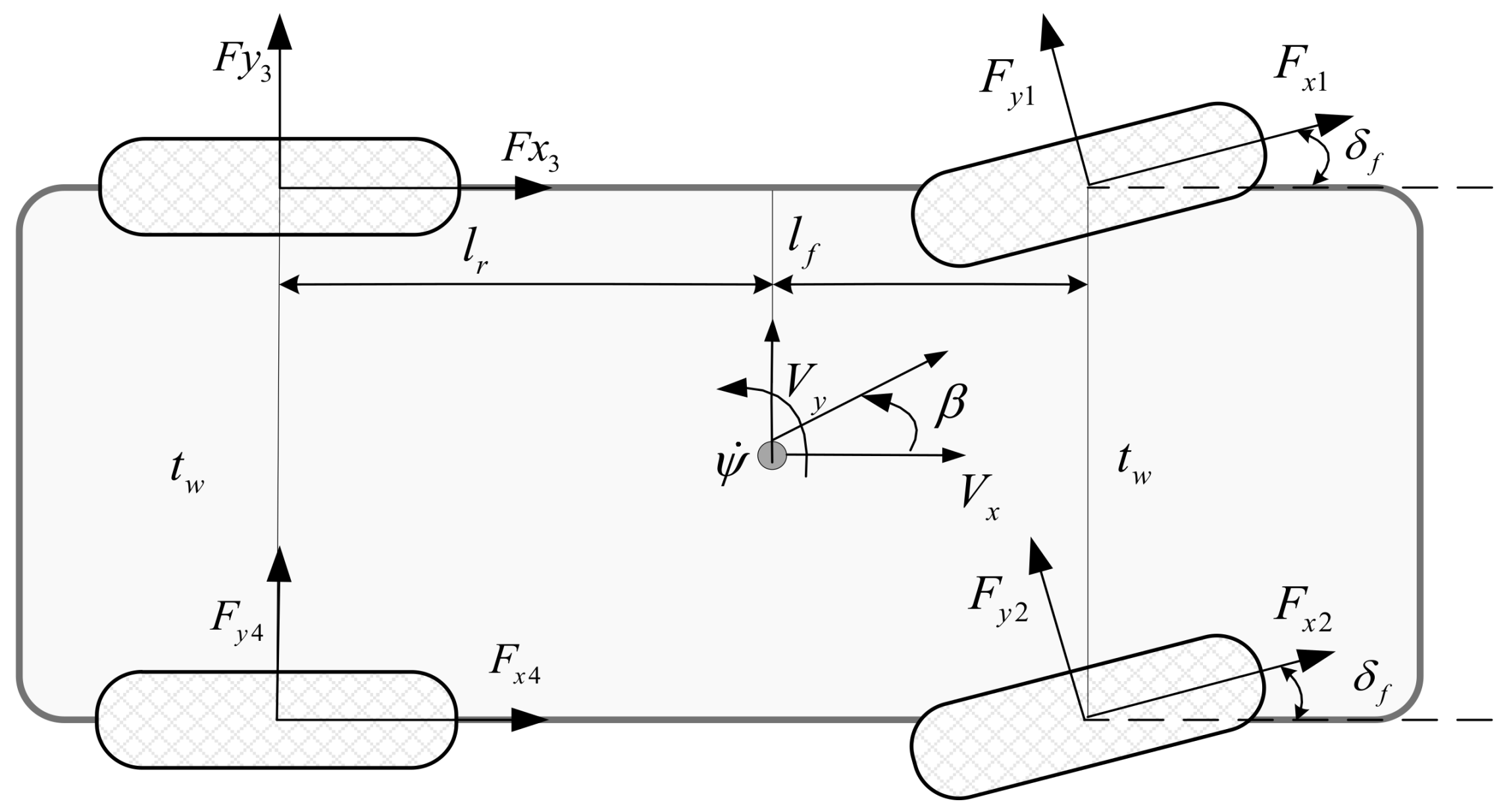
1]. Electric vehicles with four in-wheel motors (4IWM) can directly and independently control their four wheels and can realise more advanced motion control than other types of vehicles. Besides better vehicle performance and safety control, energy-efficient control can also be carried out at the same time and has been considered a very important field of research, since energy-efficient electric vehicles can improve their popularity.
There are several studies about direct yaw moment control (DYC) for the improvement of vehicle handling and stability [
2,
3]. A 4IWM electric vehicle can easily implement DYC and the contribution of DYC to energy saving during cornering has been studied [
4,
5], but its contribution is normally limited. Other researchers are studying optimal torque distribution to improve energy efficiency [
6,
7], where the studies are usually conducted by incorporating the IWM efficiency map.
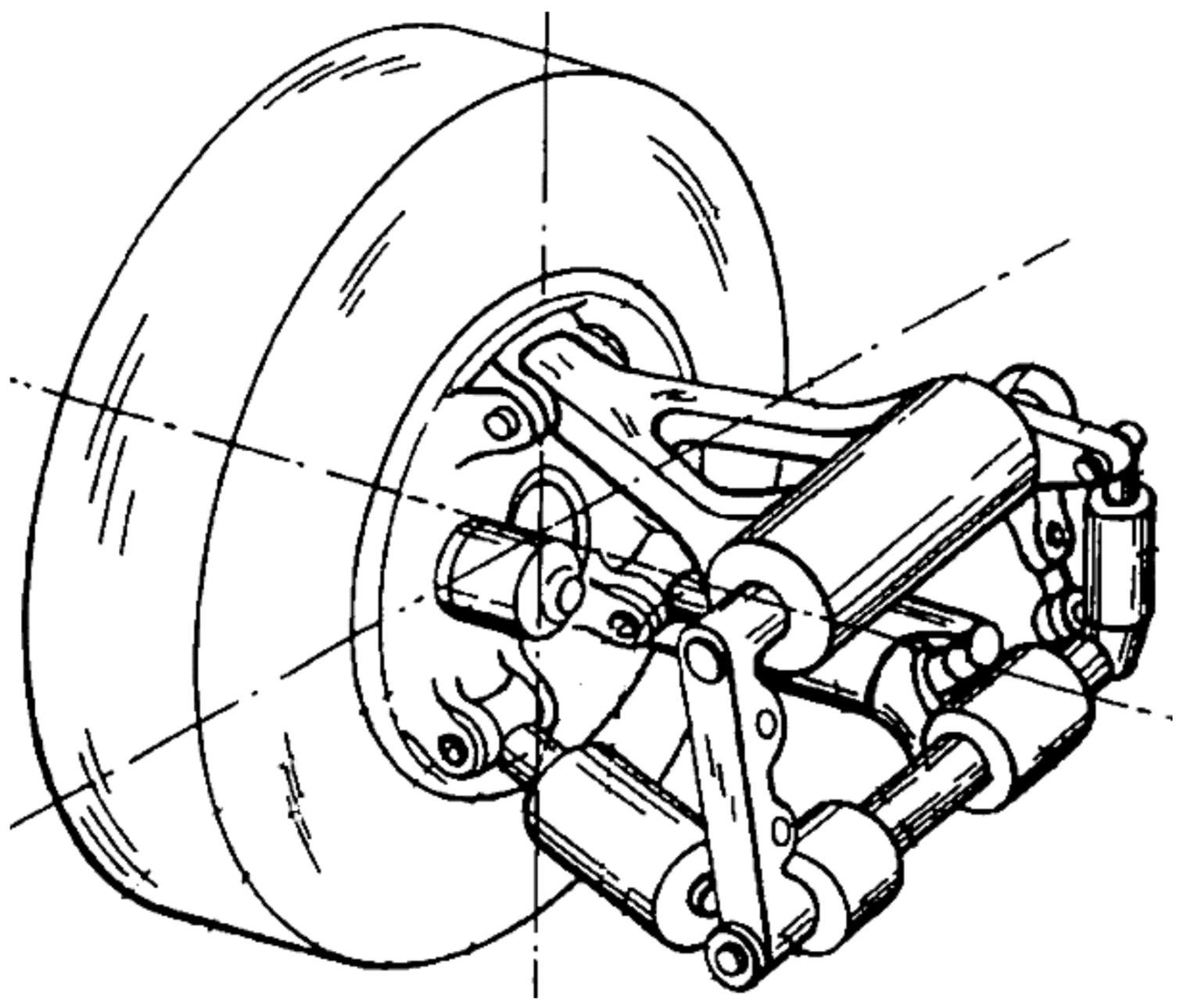
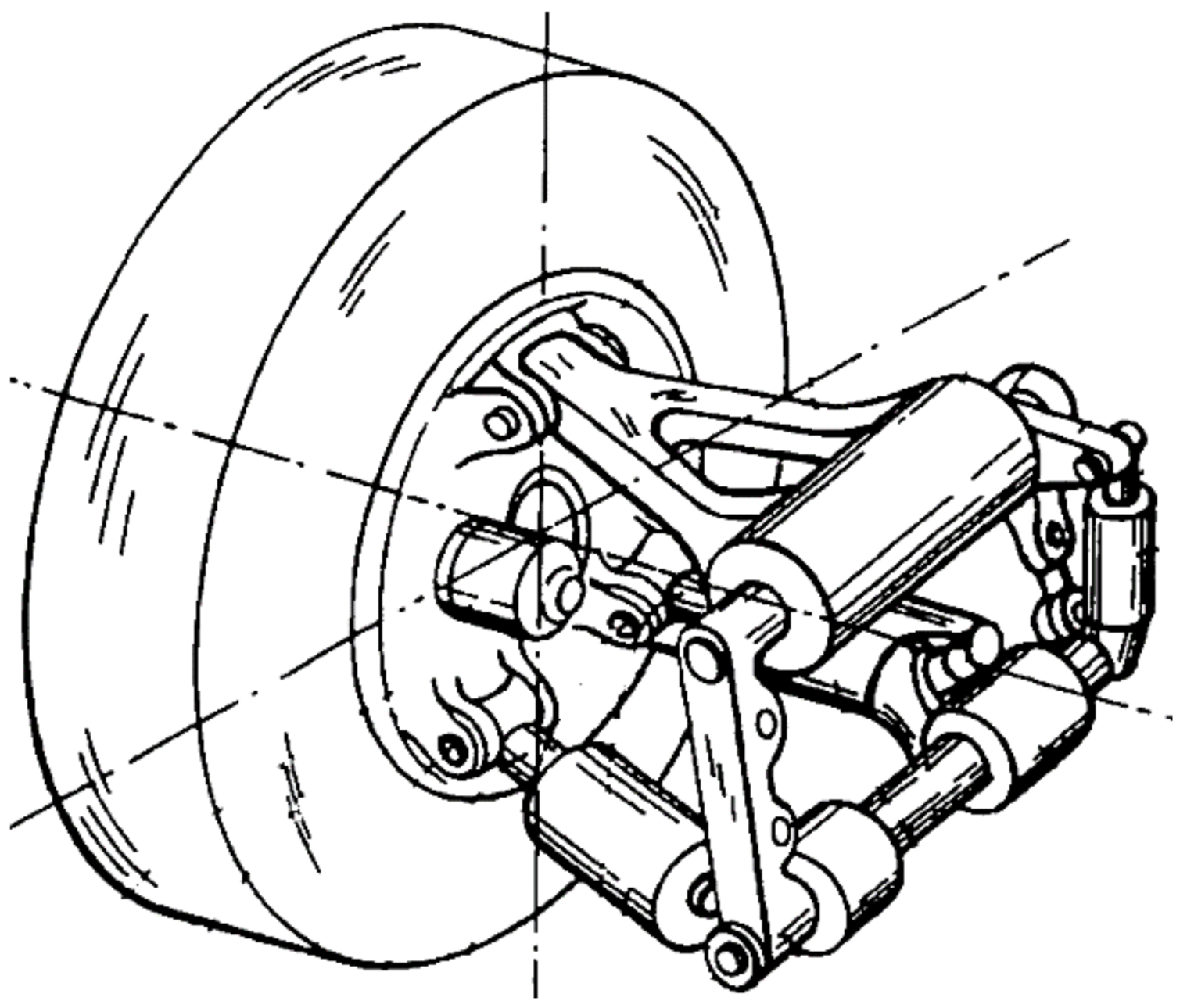
Electrification of vehicle actuators such as steering actuators and camber actuators provides opportunities for more advanced suspension designs, i.e., the active wheel corner module (ACM) [
8], shown in
Figure 1. In addition to 4IWMs, ACM can also realise individual wheel steering and active tyre camber control. In conventional vehicles, tyre camber angles are usually passively tilted according to suspension geometry that limits the possible ranges. Electric vehicles with ACM suspension design can have up to 12 control variables: 4 wheel drives, 4 steering controls and 4 camber controls. This is realised in the research concept vehicle with wheel corner module functionality, developed by KTH Royal Institute of Technology and shown in
Figure 2 [
9].
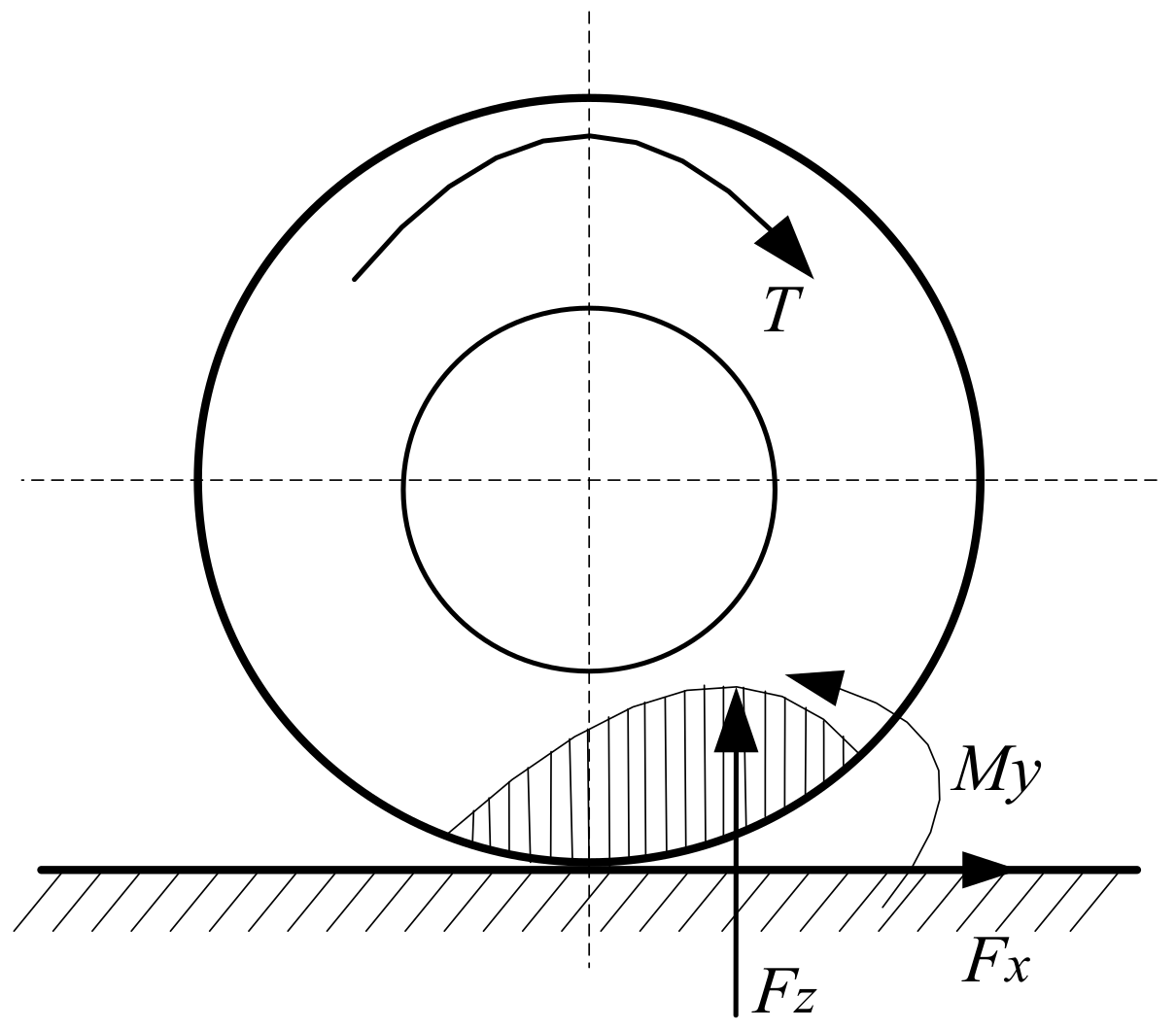
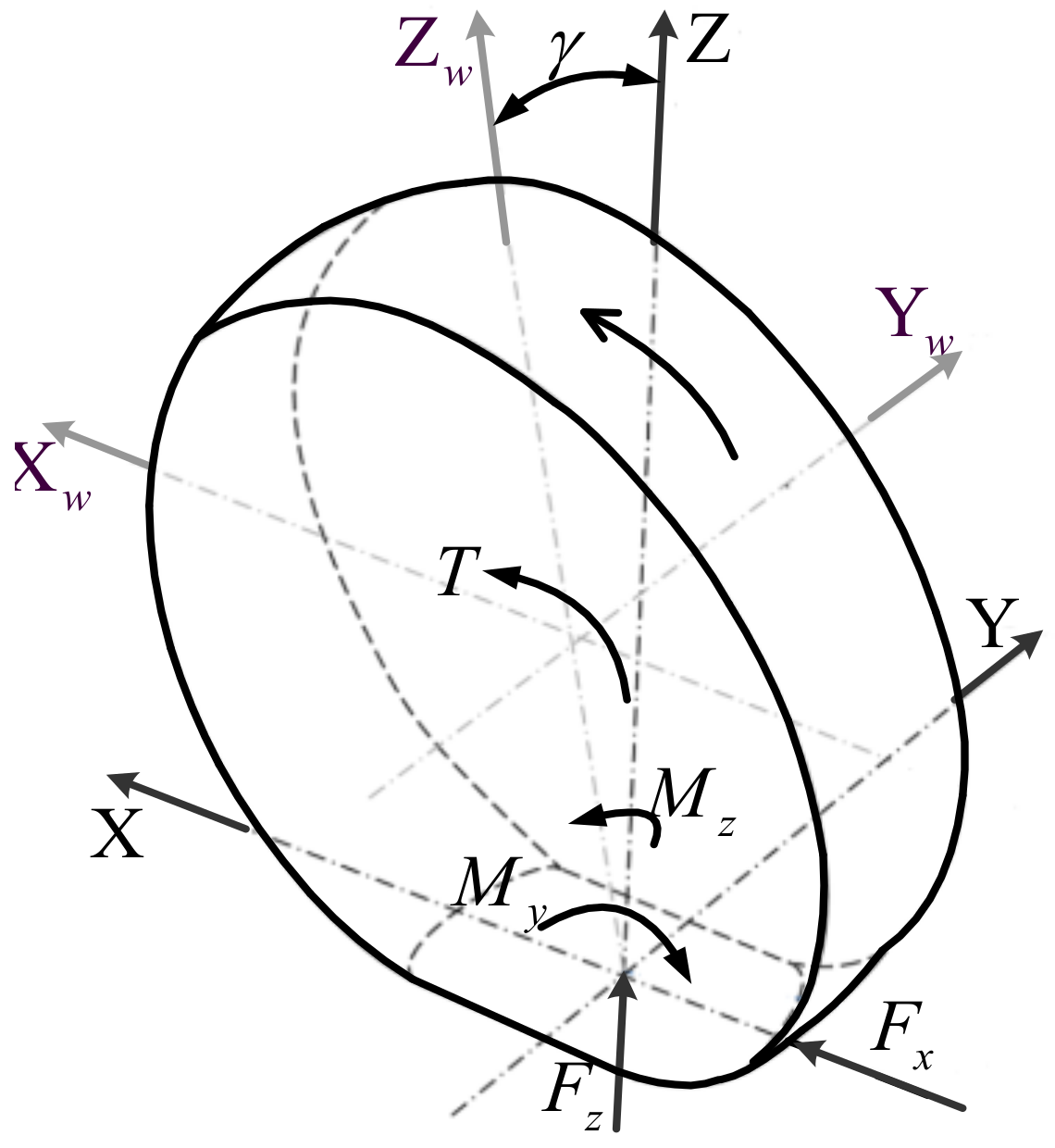
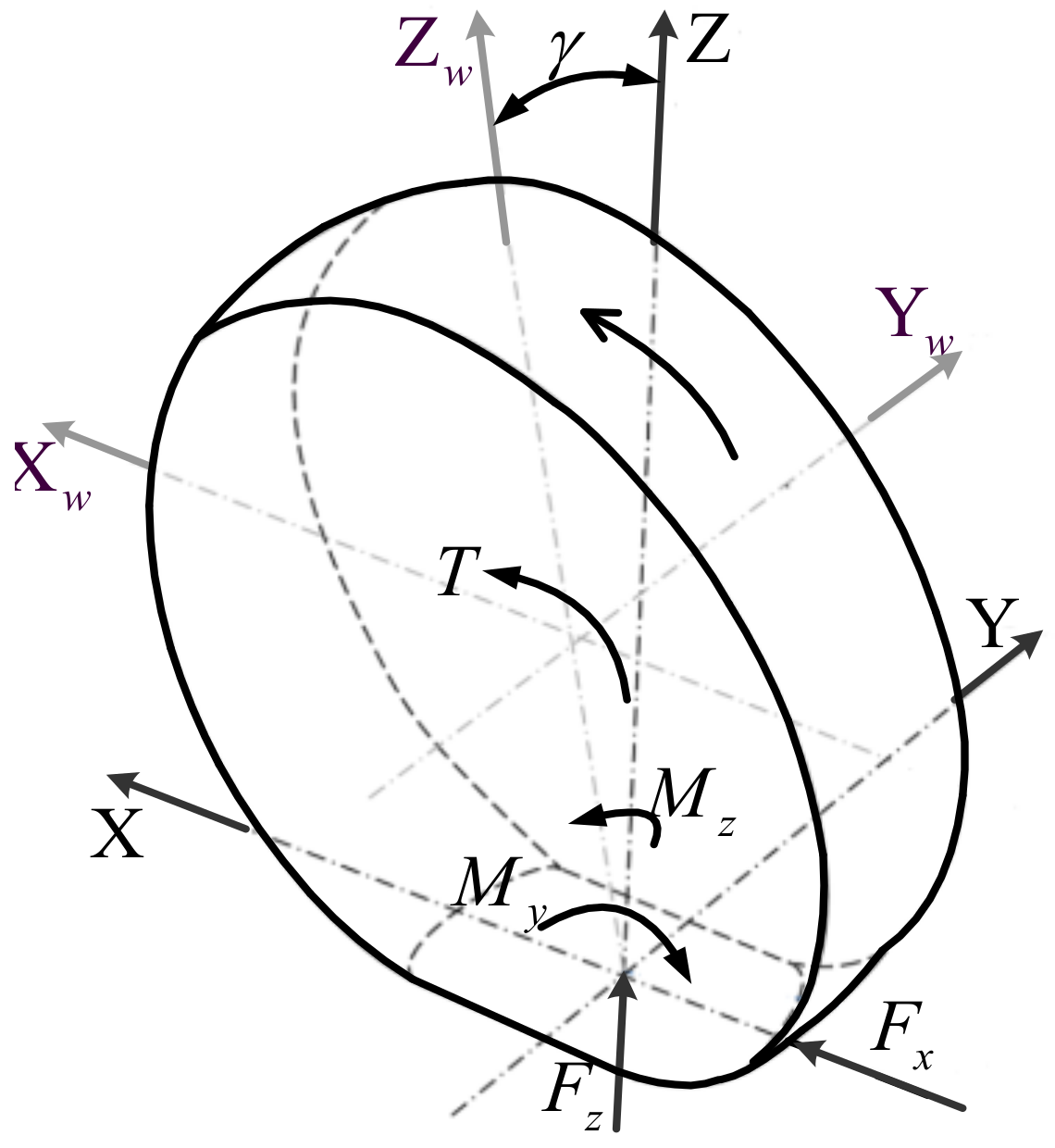
Camber angle is the angle between wheel plane and the normal to road [
10]. For the simplicity of understanding camber control in this paper, the camber is defined as positive when the upper part of the tyre is lent to the left. Publications about controlling the camber angles to reduce energy consumption are quite few. There are some examples of research combining DYC with active camber control [
11,
12] and its effects on energy saving have also been studied [
13,
14]. From the results, the percentage of energy reduction seems promising. However, only camber’s effect on the lateral force was considered and no applicable camber controller has been suggested.
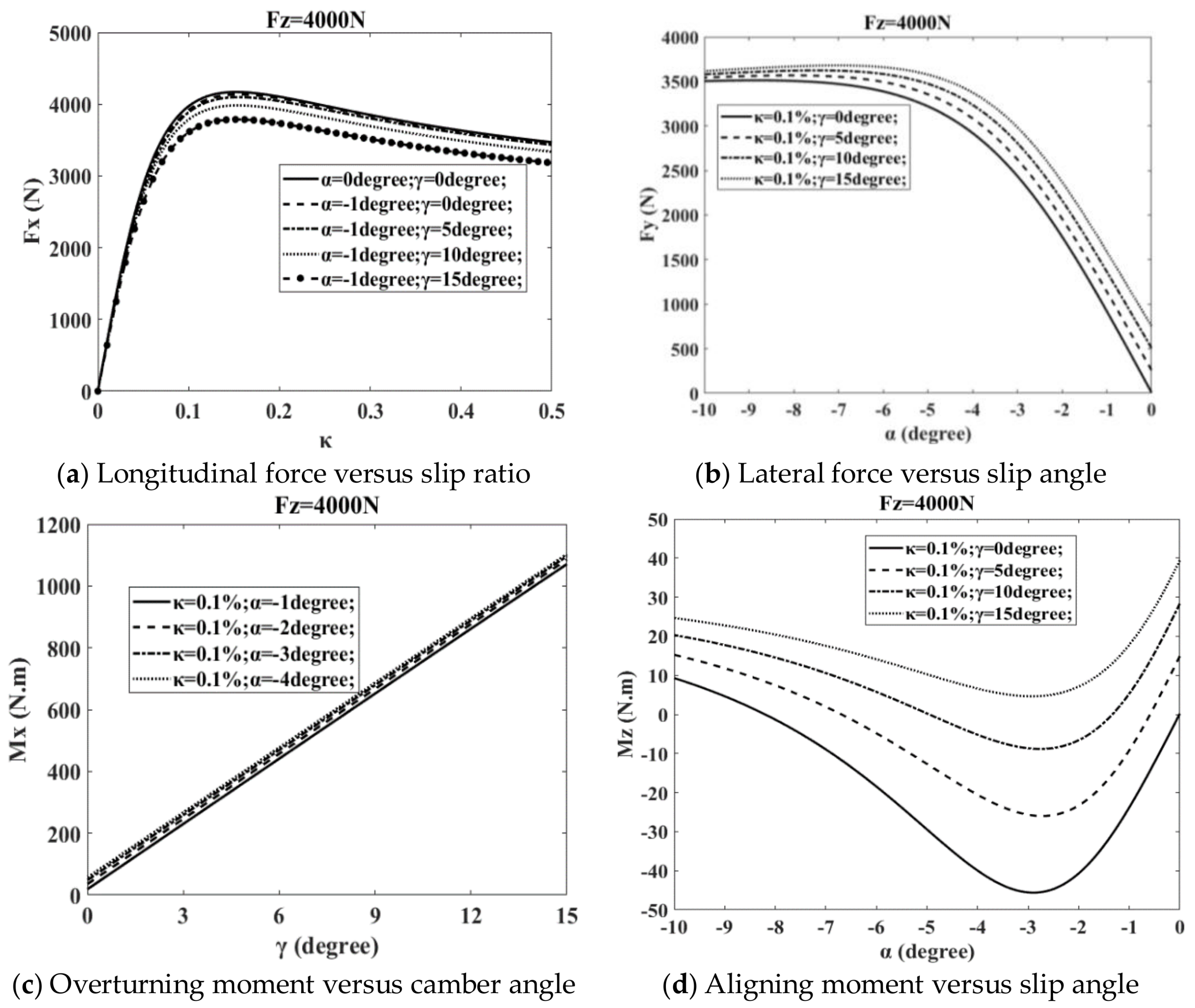
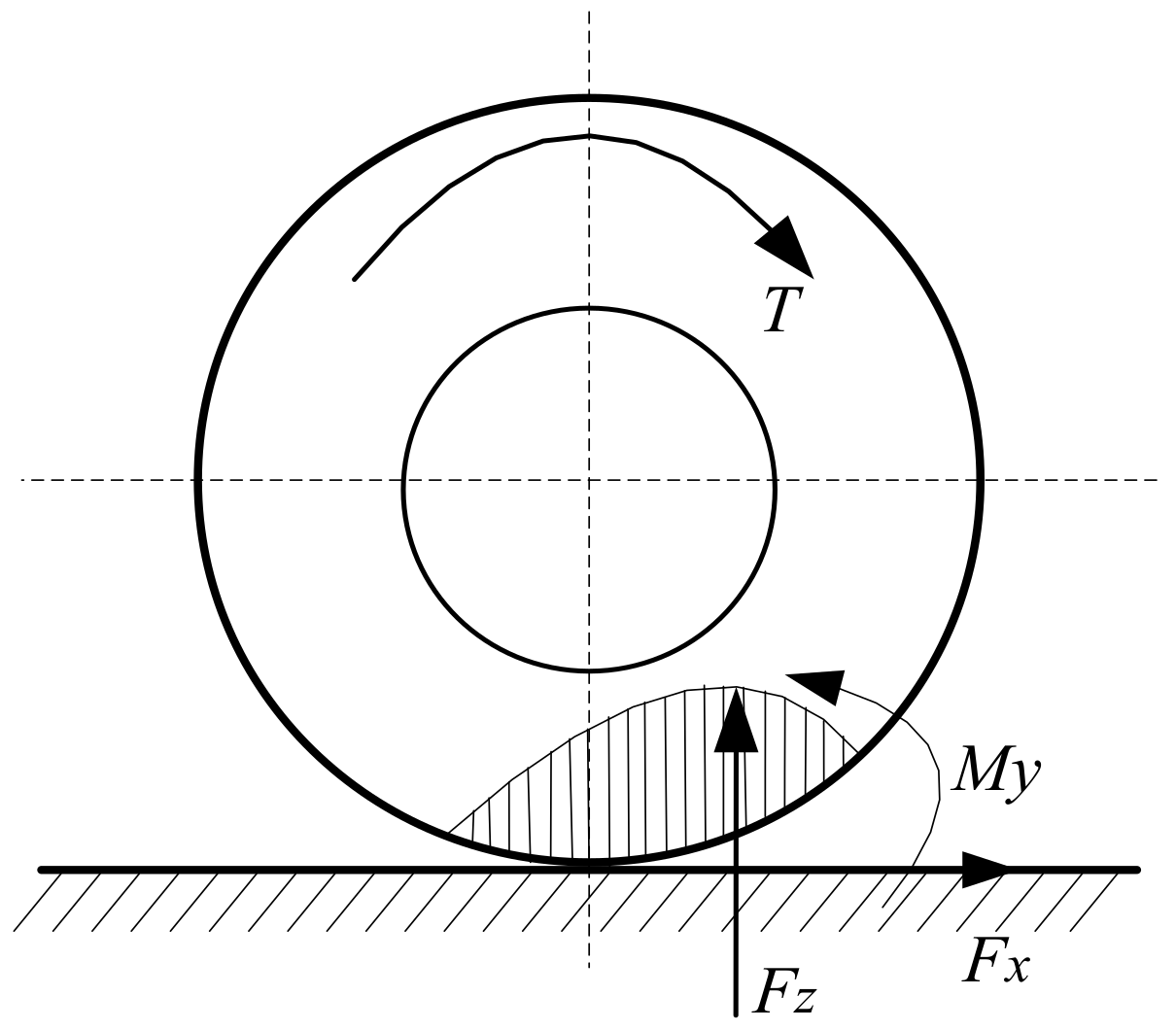
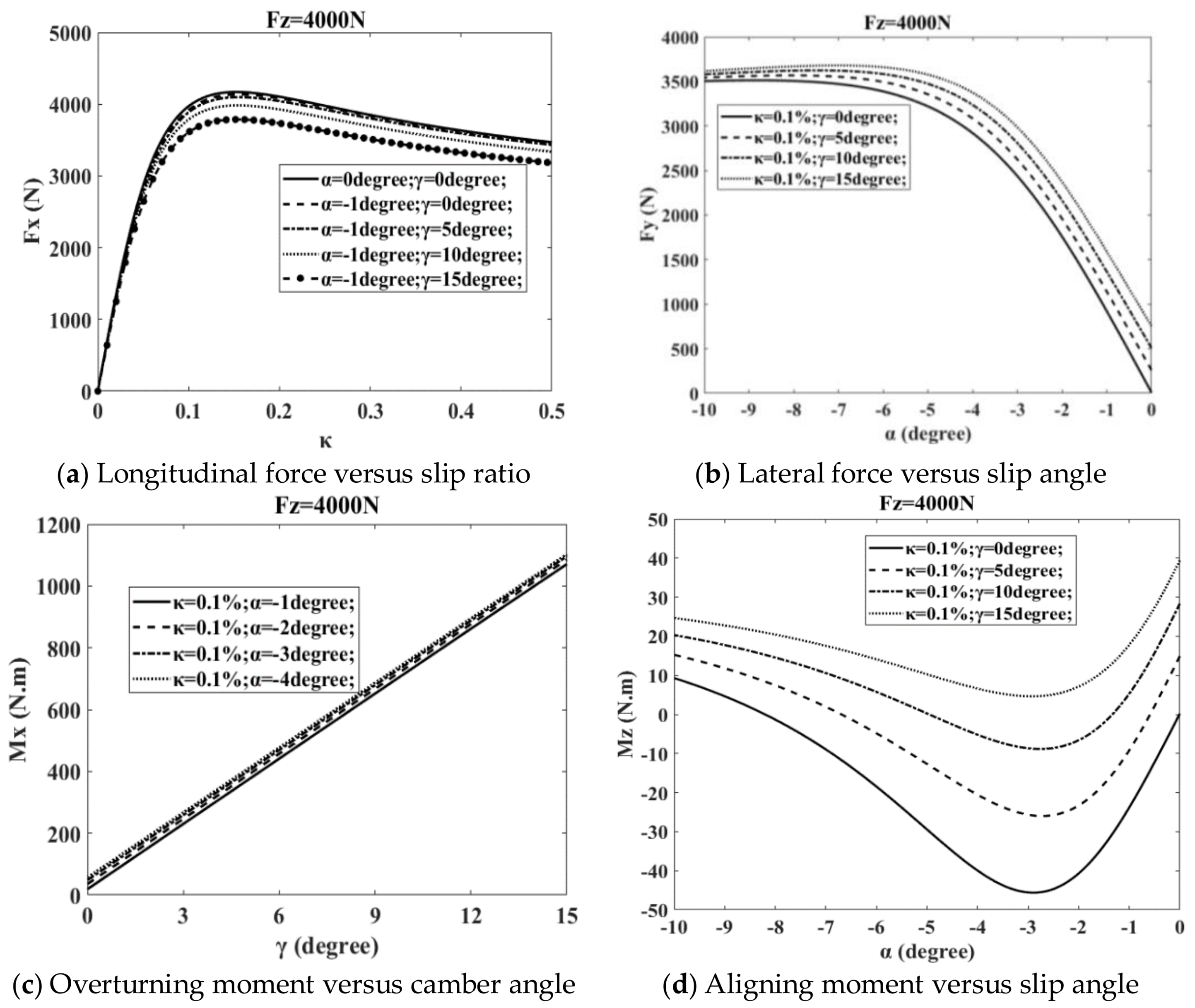
The aim of this work is to analyse how the camber affects power loss during cornering. The components of power loss, which includes the power to control camber angles are established. The longitudinal and lateral tyre forces interact with each other, especially in the case of high lateral acceleration during which the slip angle can be large enough to greatly influence the longitudinal forces. In addition, the camber angle could also cause changes to the forces and moments of the tyre [
10,
15,
16]. For this reason, Magic Formula tyre models for longitudinal force, lateral force, overturning moment and aligning moment are adopted for simulation. Furthermore, a driver model and a method for camber control are designed to follow the designed paths. Two paths and three combinations of camber controls are chosen to primarily study camber’s effect on the components of power loss. After that, more comprehensive simulation settings are then studied and an applicable camber controller is proposed and verified by simulation.
5. Controller Design for Camber
Compared to the power loss without camber
, the percentage of energy saving
with camber control can be described as
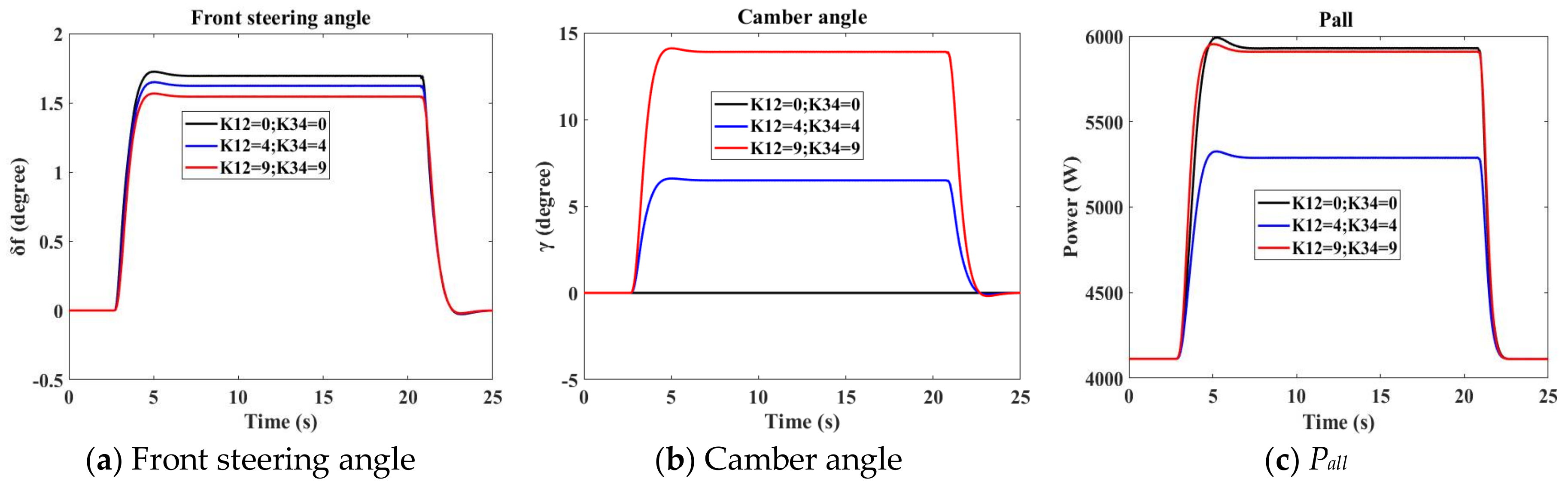
From
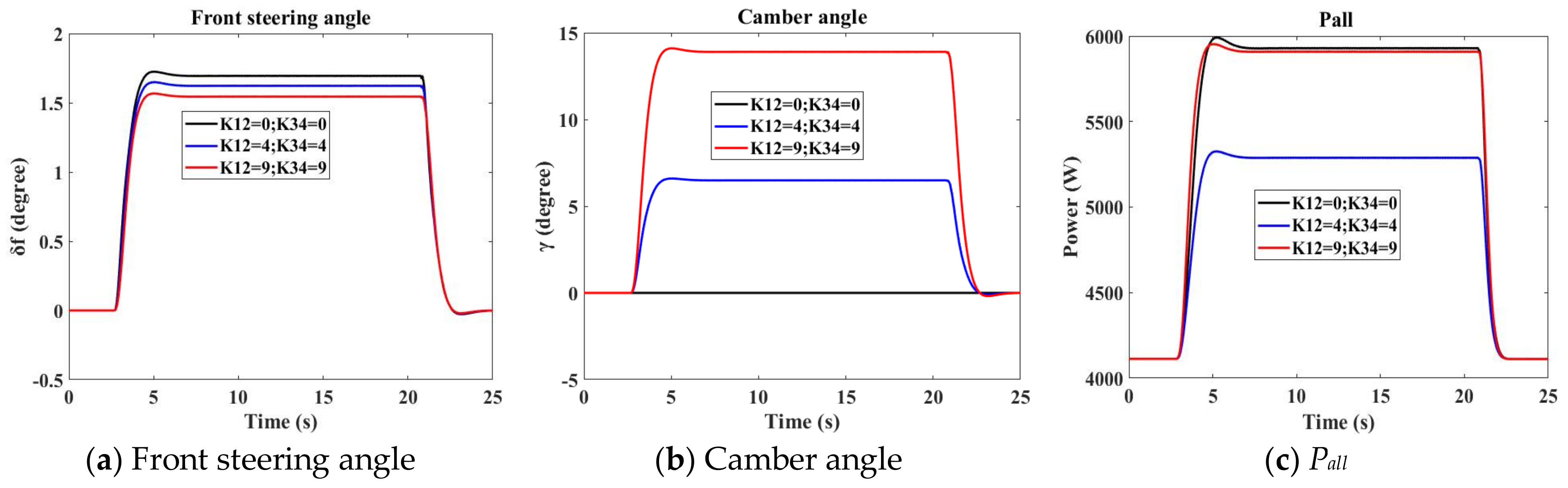
Section 4, for
R = 100 m,
Vx = 62.3 km/h and
ay = 3 m/s
2, when
, the camber angles at steady-state cornering are found to be 6.5
0 and
is 8.31%; for
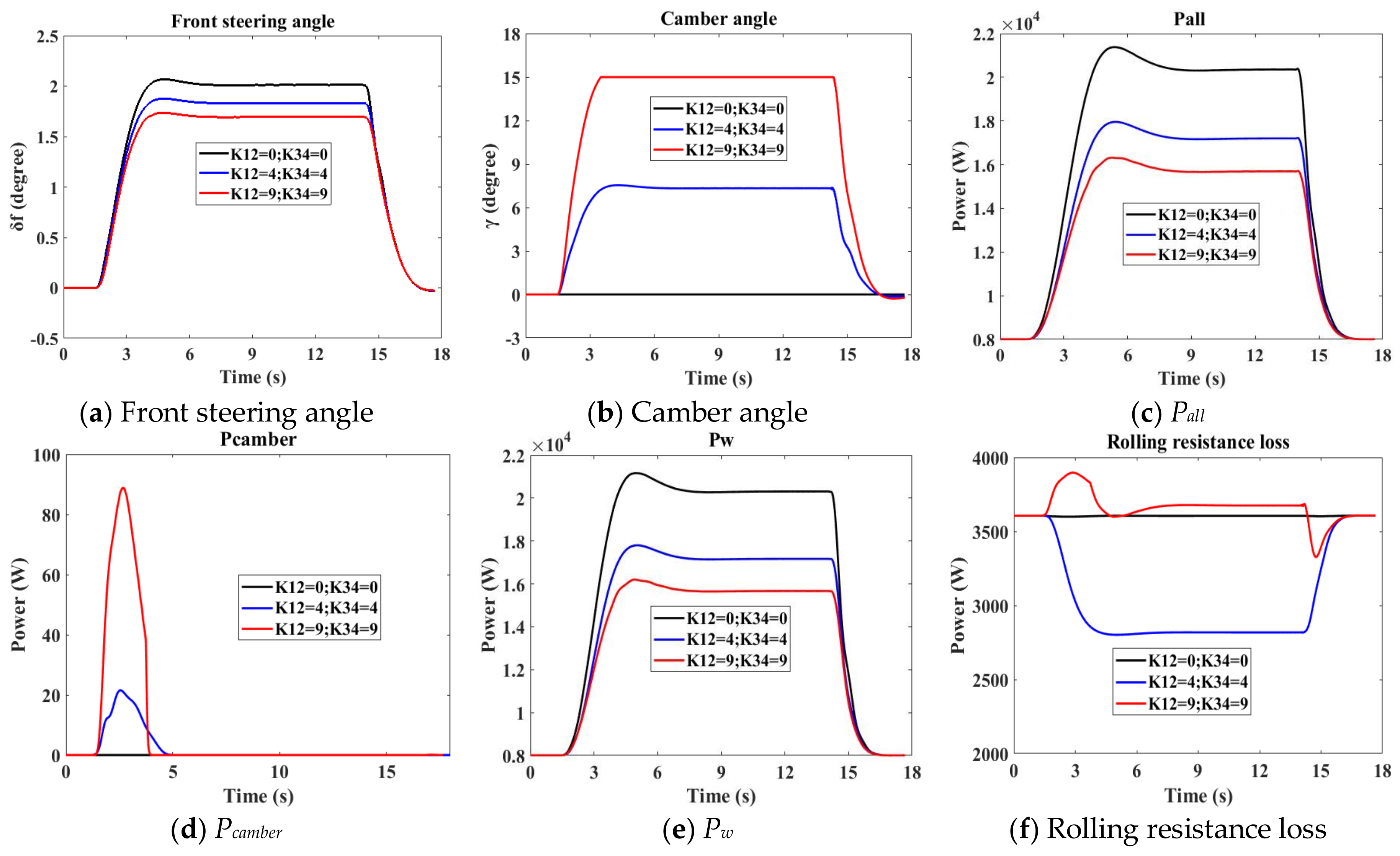
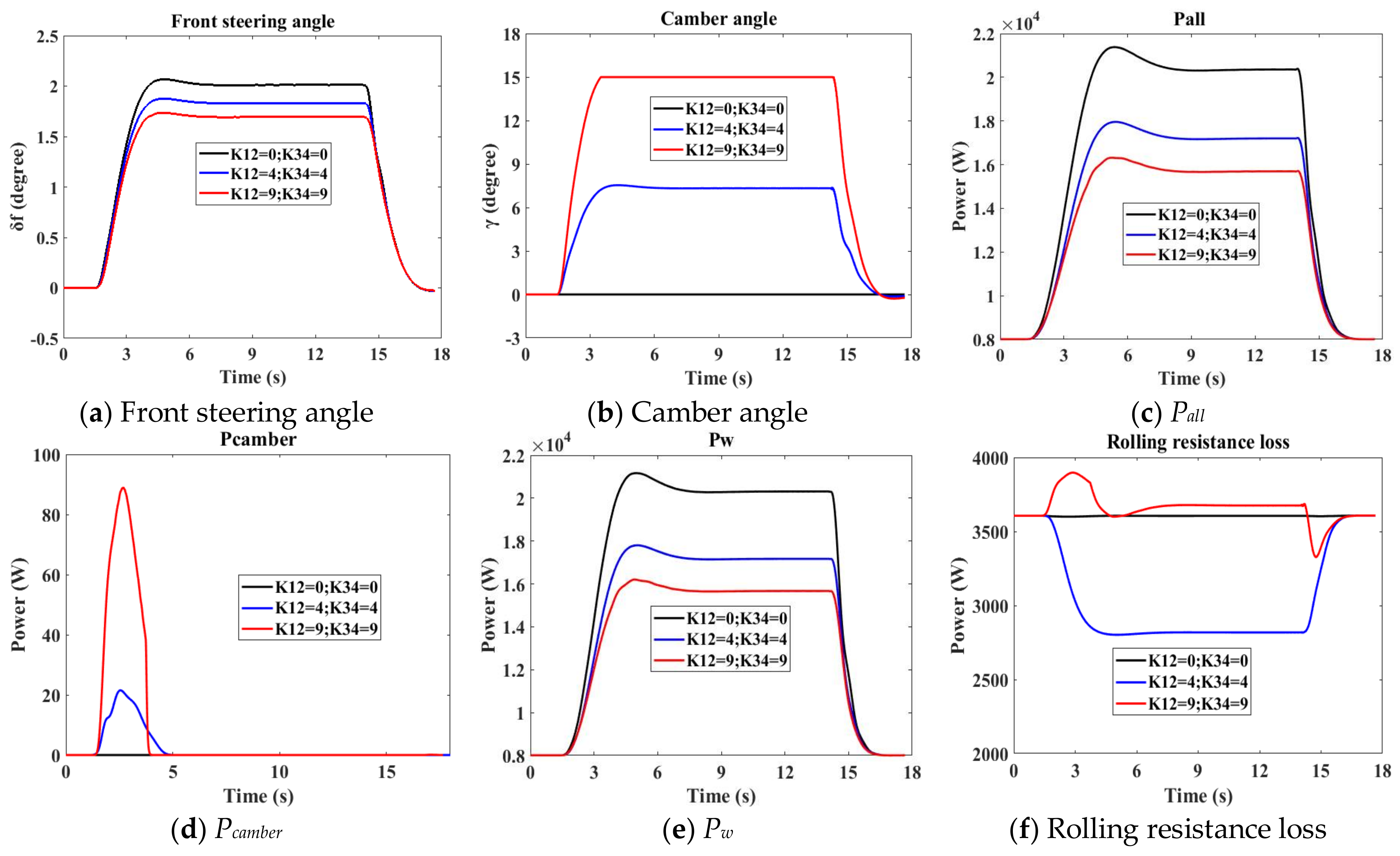
R = 100 m,
Vx = 88.18 km/h and
ay = 6 m/s
2, when
, the camber angles at steady-state cornering are 15
0 and
is 19.11%.
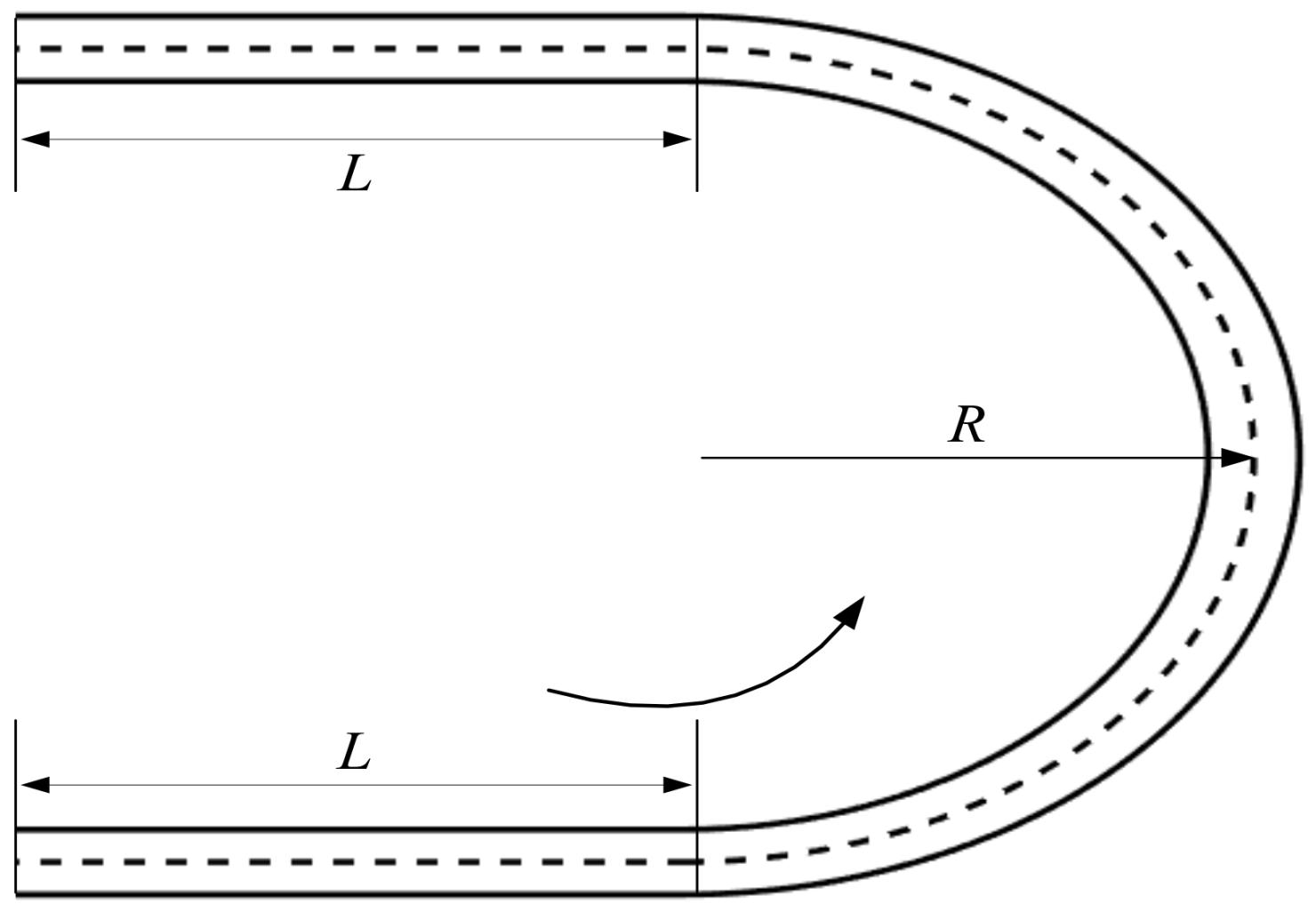
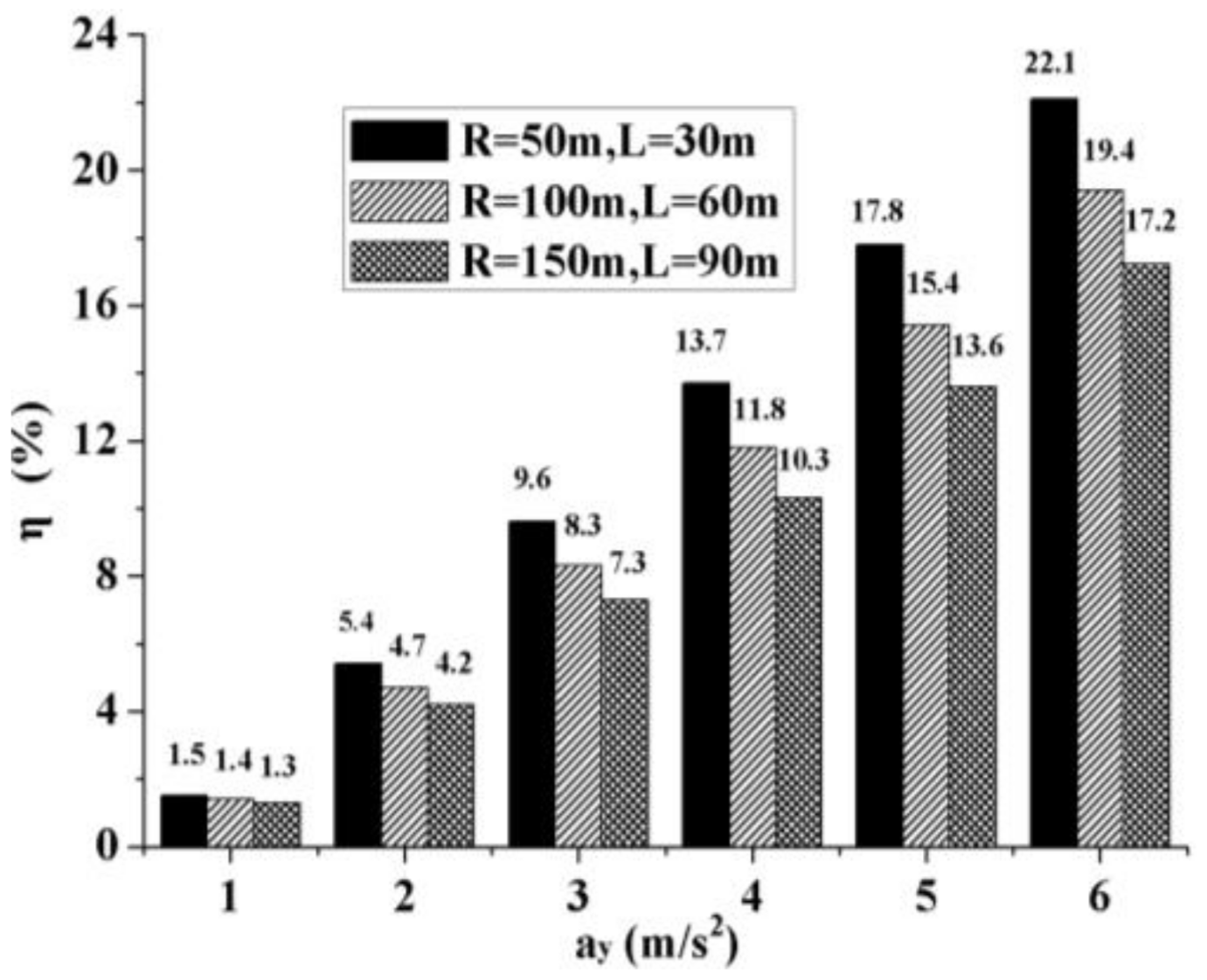
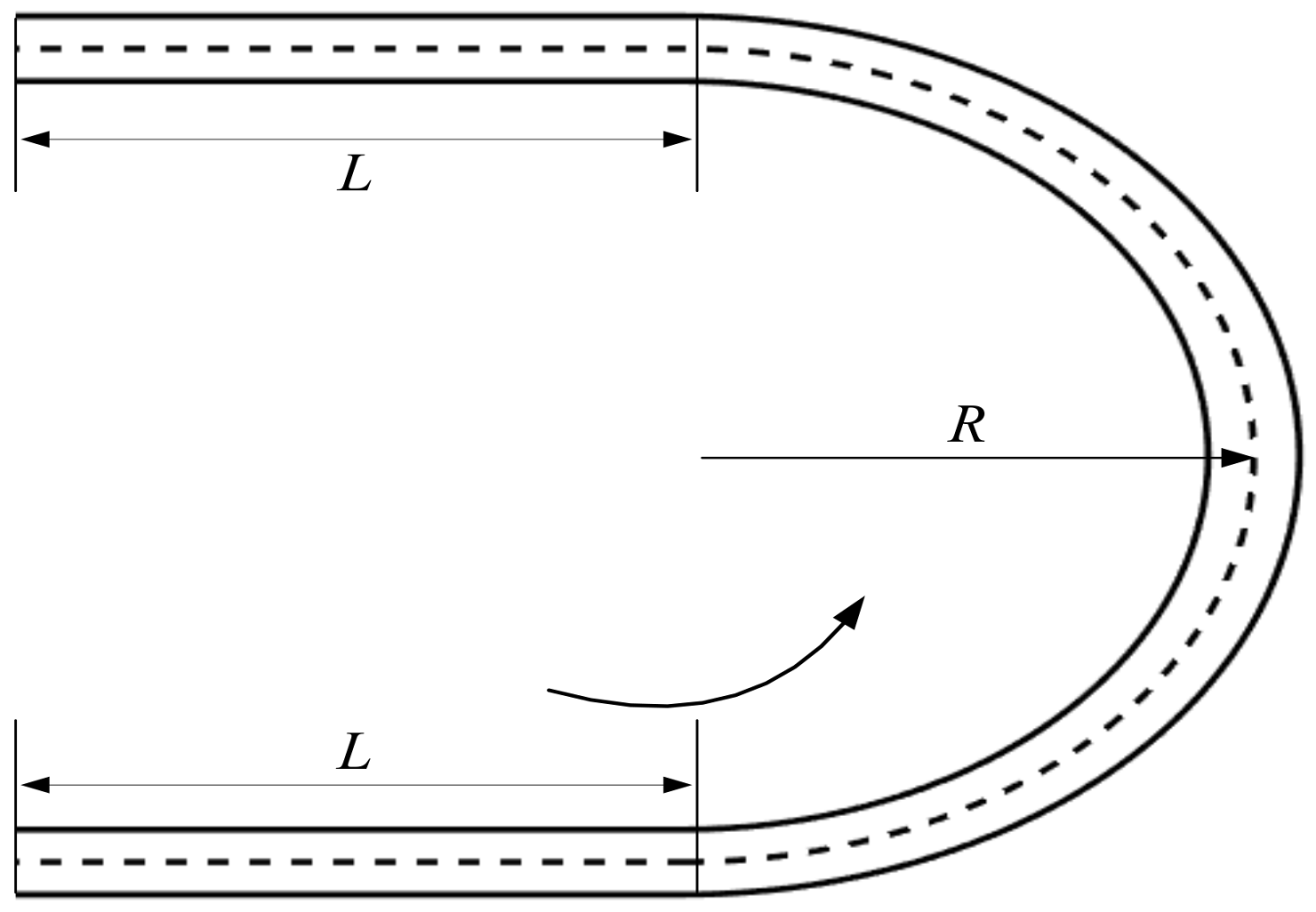
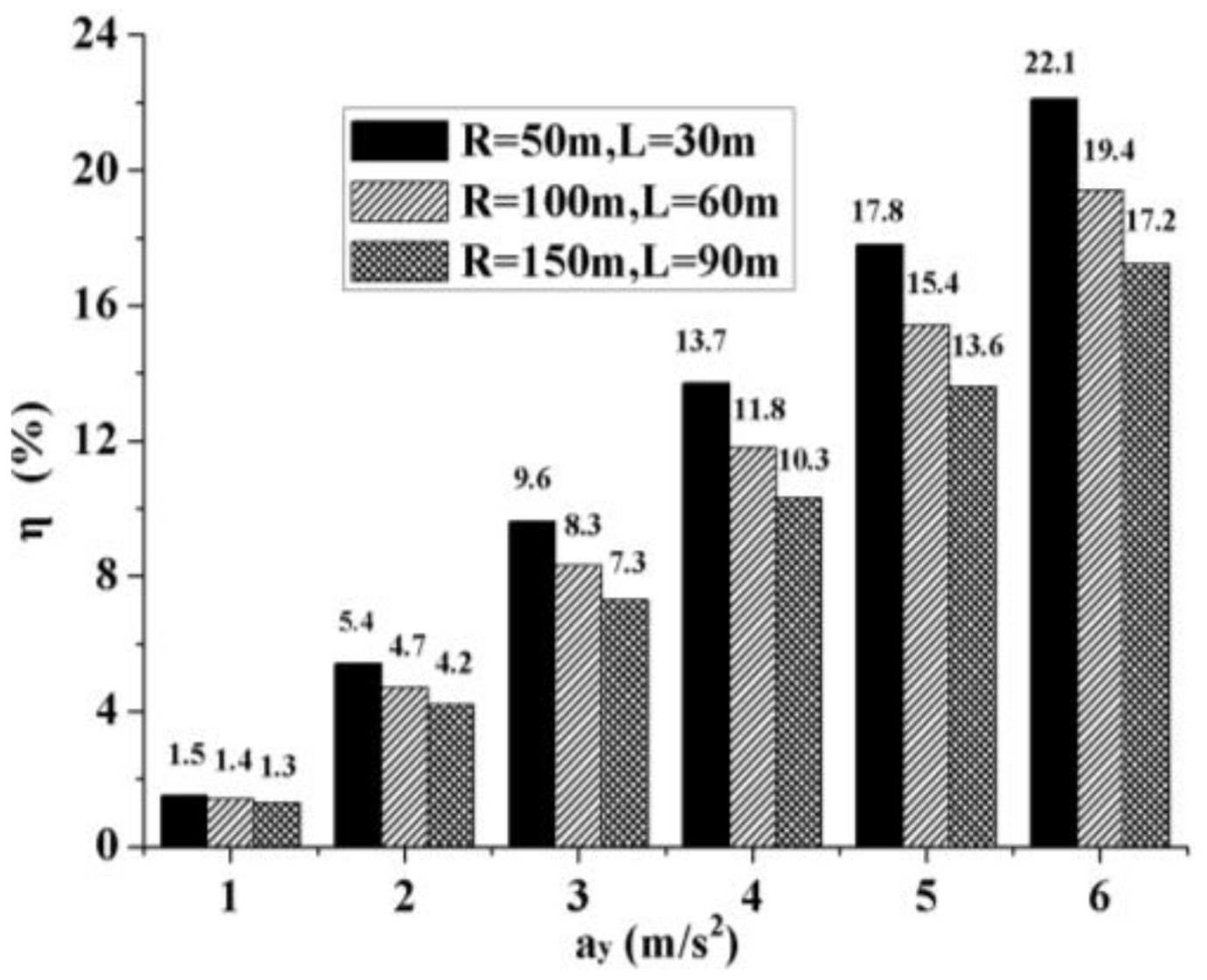
These results show that camber can be very promising to save energy during cornering. However, how to fully use the potential of camber for different driving scenarios remains to be explored and a camber controller needs to be designed. A more comprehensive test scheme has been developed and is shown in
Table 7. Besides
L = 60 m and
R = 100 m, two groups of path parameters (
L = 30 m,
R = 50 m;
L = 90 m,
R = 150 m) are added. Six lateral accelerations (1, 2, 3, 4, 5 and 6 m/s
2) at steady-state cornering are studied and corresponding velocities are deducted.
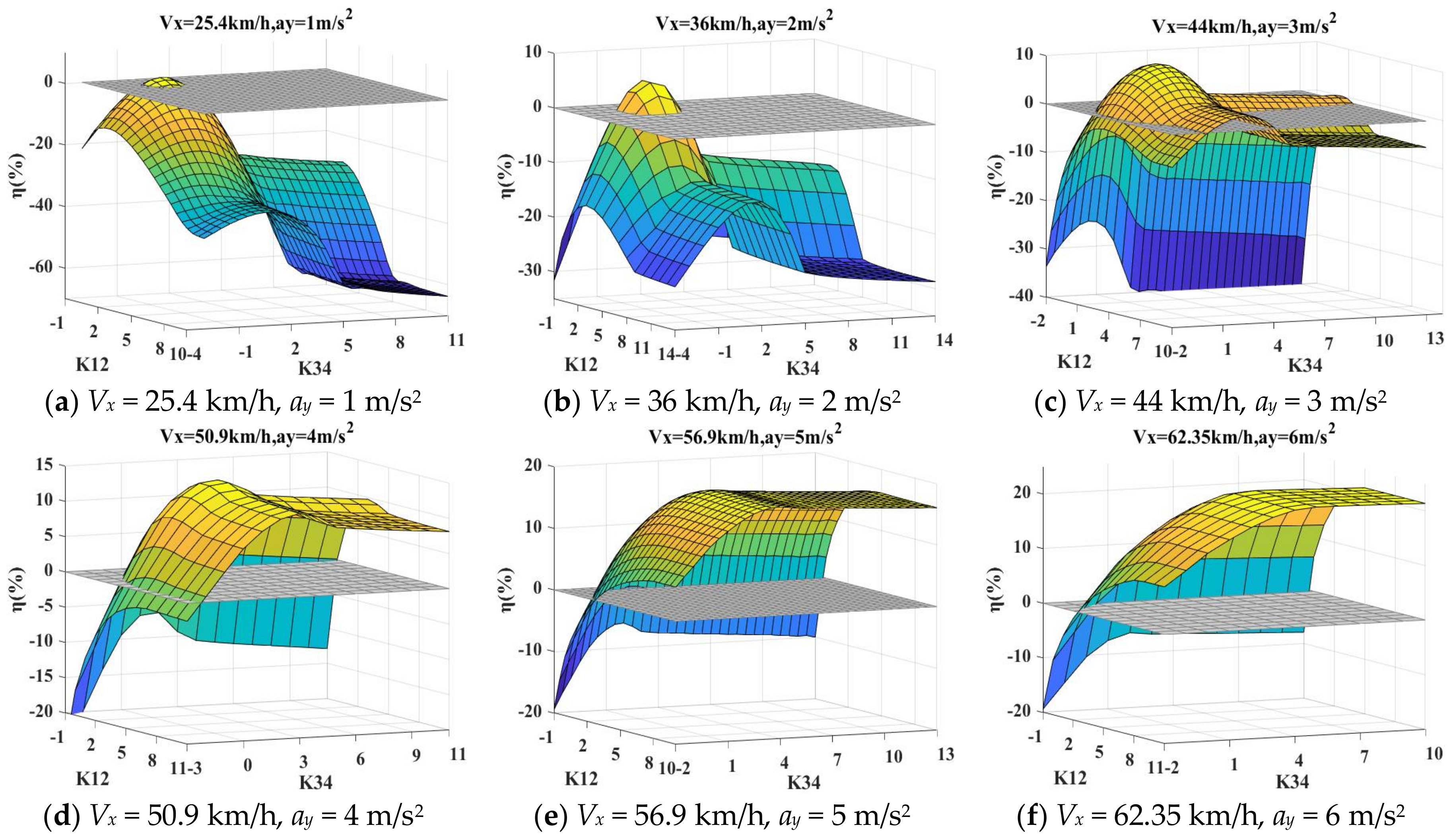
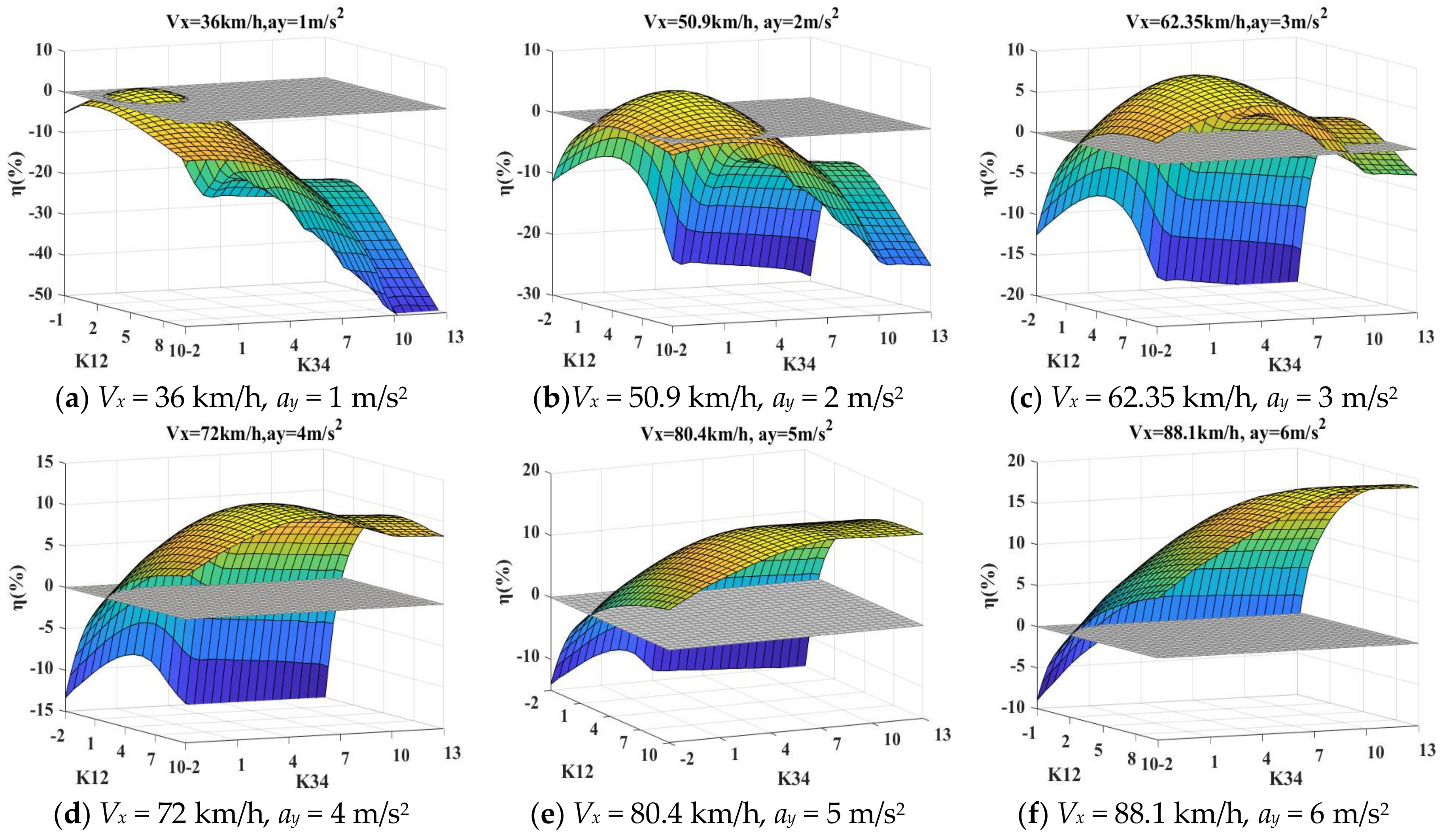
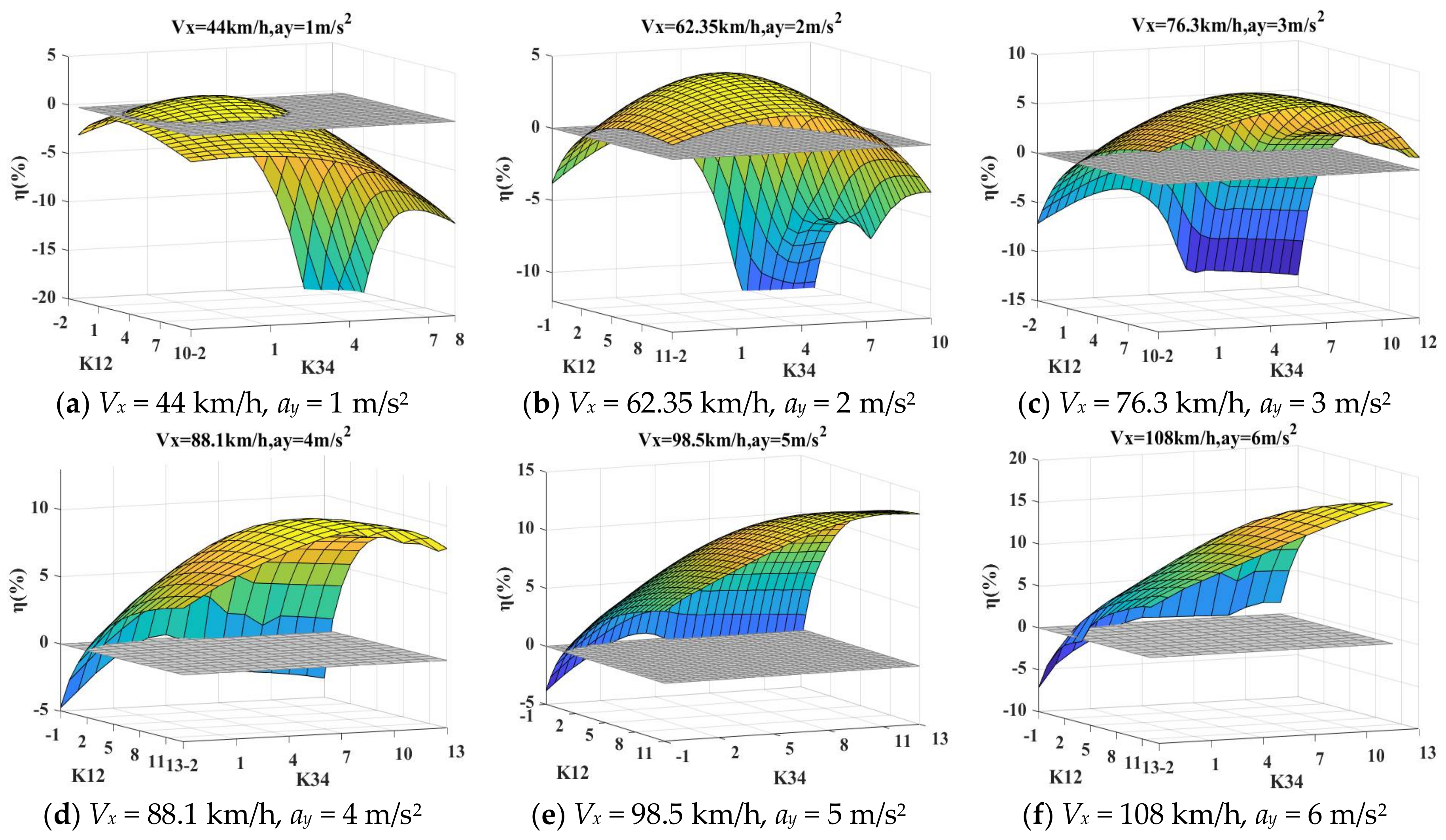
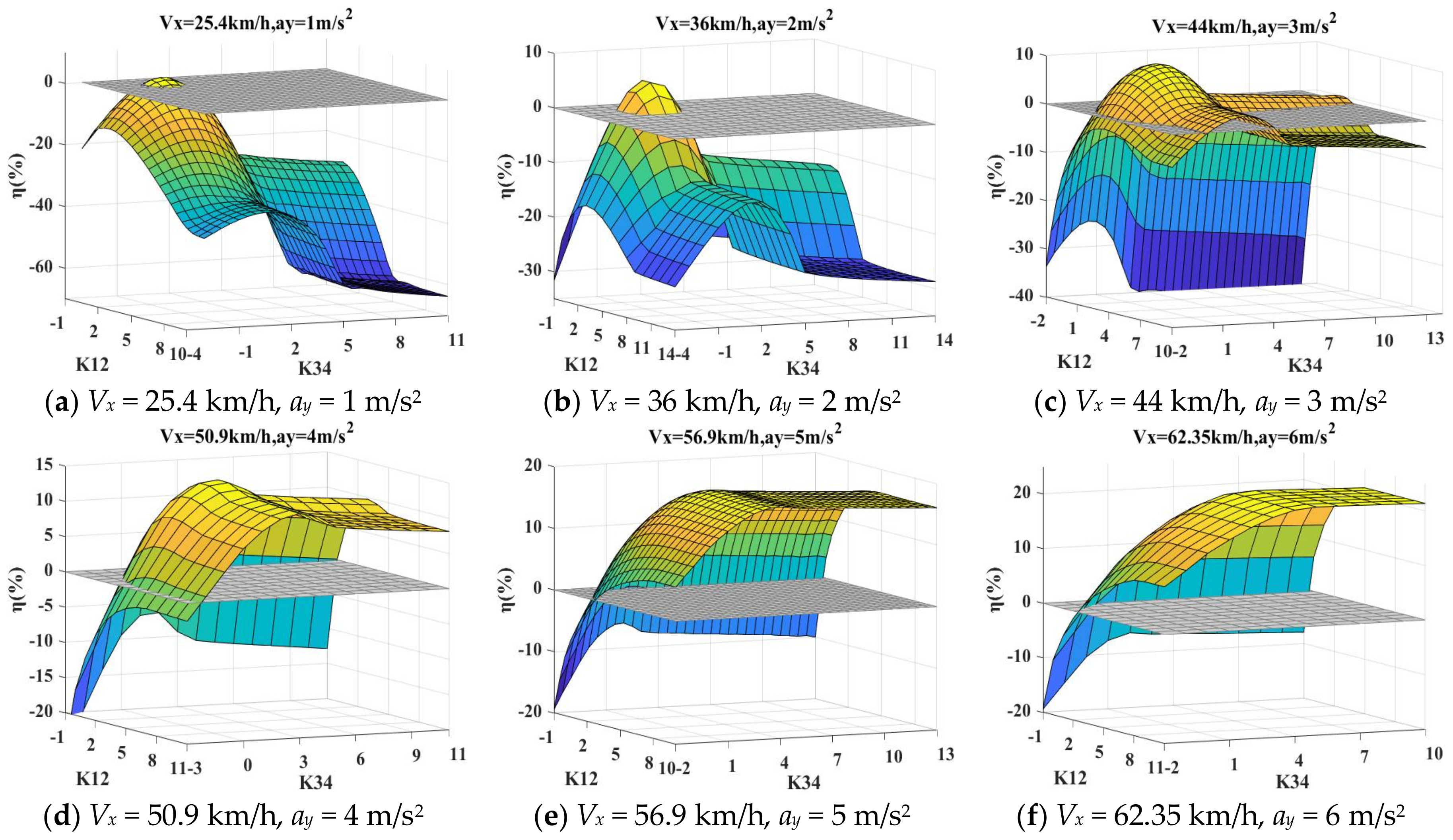
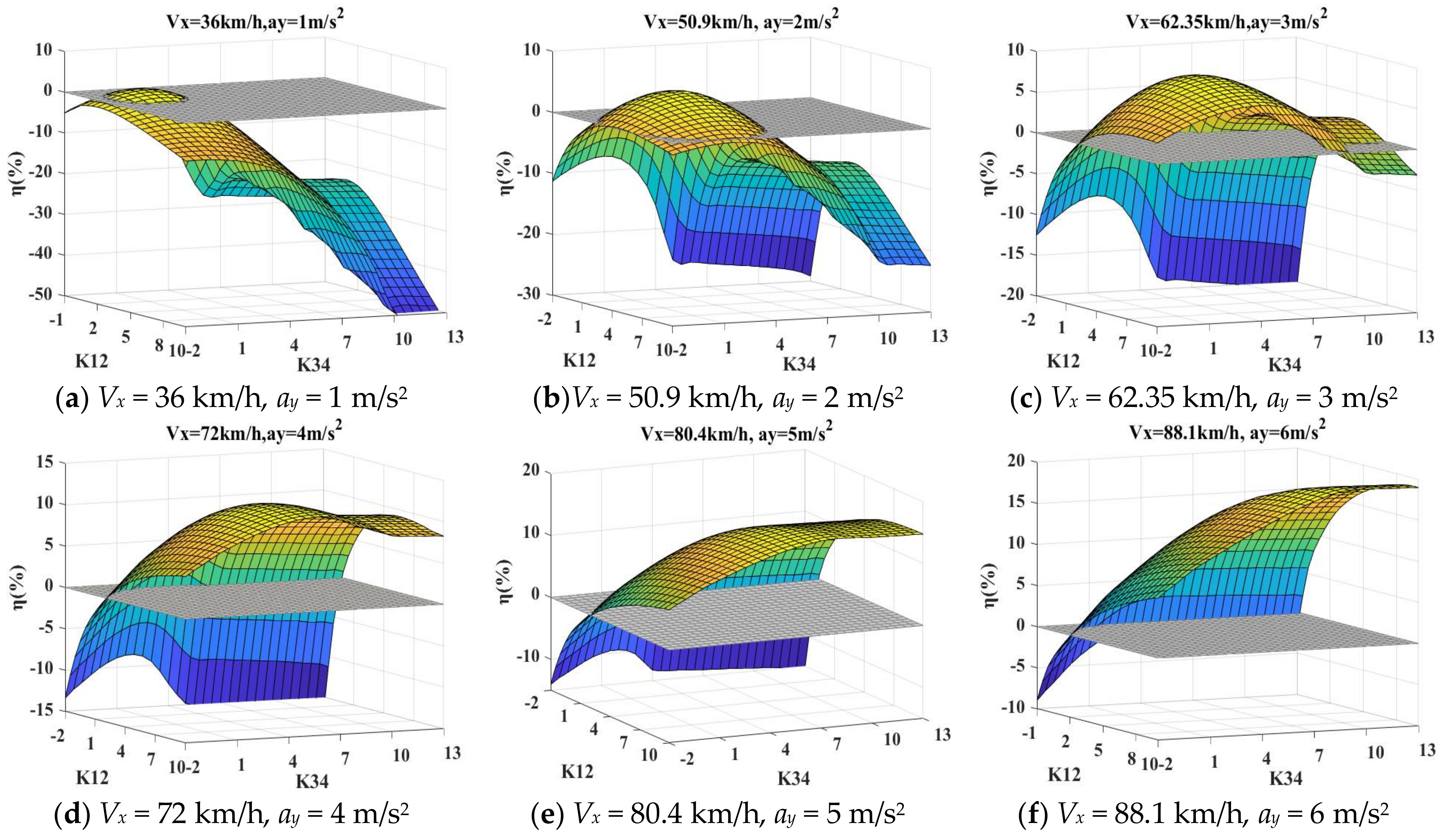
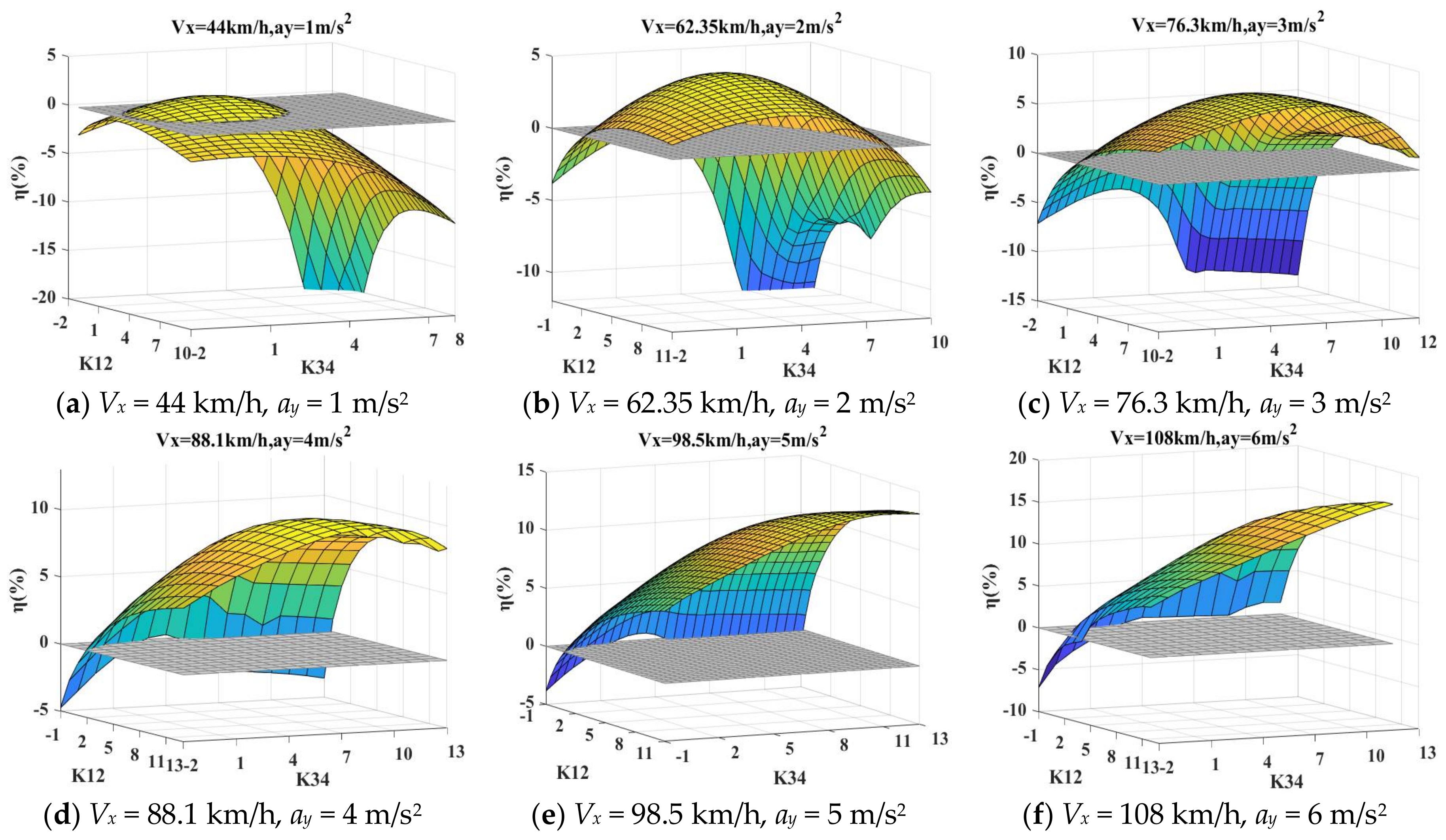
Figure 14,
Figure 15 and
Figure 16 present the results for the simulation setups in
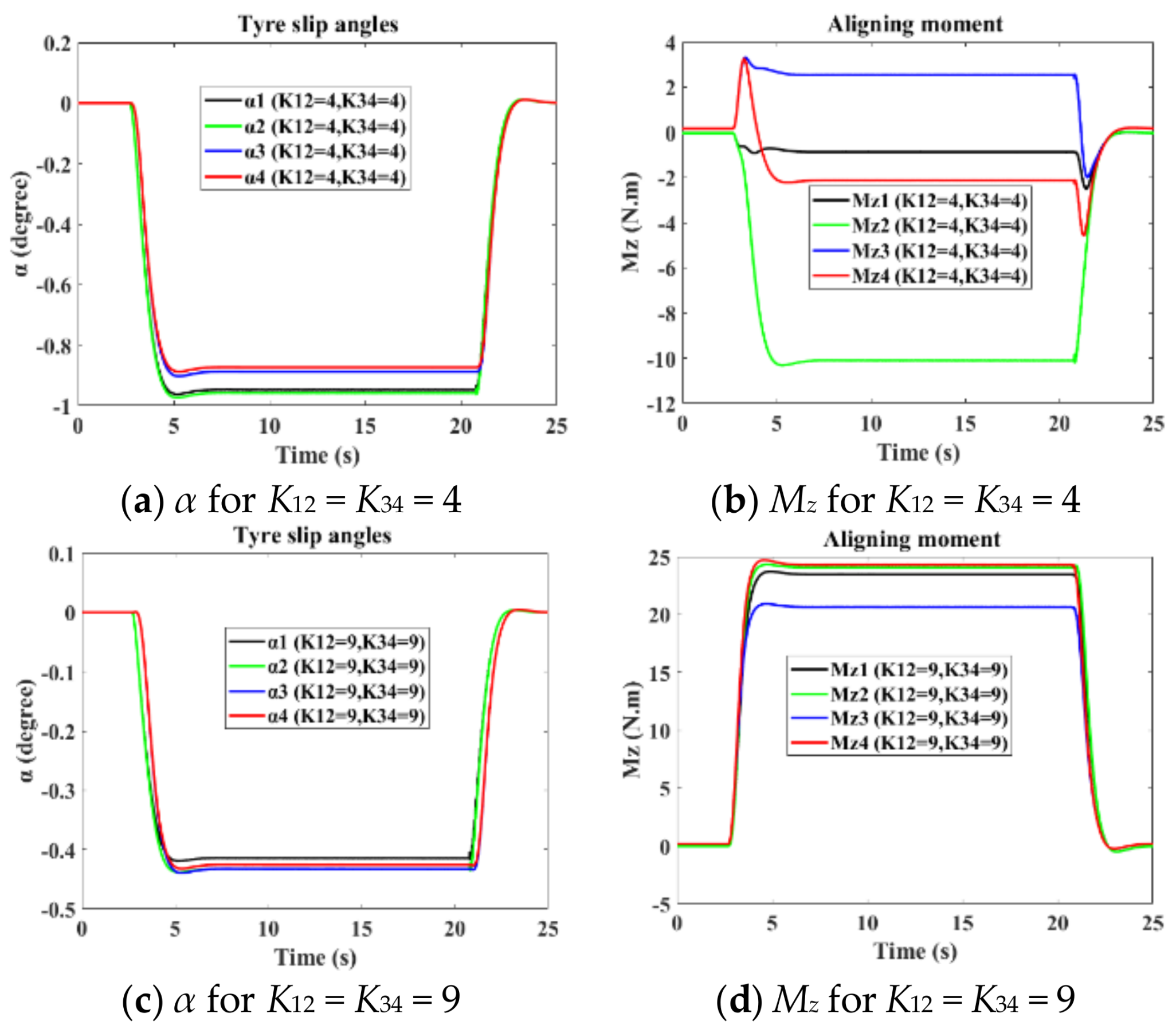
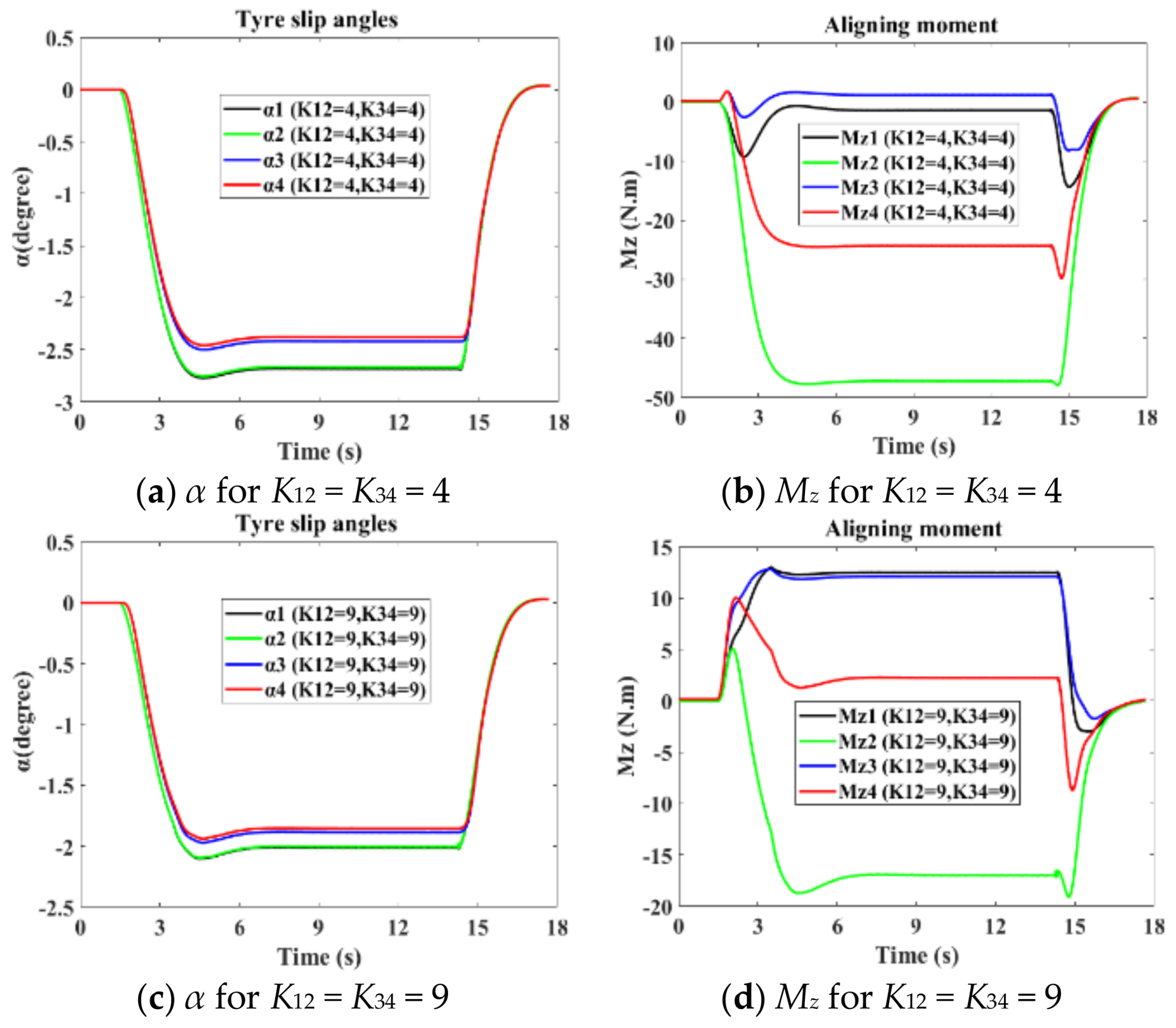
Table 7 and the reference 0% energy saving planes are also plotted in these figures. Firstly, it is shown that the higher the lateral acceleration at steady-state cornering is, the more energy saving can be achieved. The main function of the camber control is to reduce the lateral slip loss and when the lateral acceleration is small during the cornering, the percentage of lateral slip loss of total power loss is small. Camber control therefore makes no significant contribution to energy saving. Because of different working slip regions of
Mz introduced in
Section 4.3, at low accelerations higher camber angle settings might increase rolling resistance loss considerably as can be seen from
Figure 14a–c,
Figure 15a–c and
Figure 16a–c. For 6 m/s
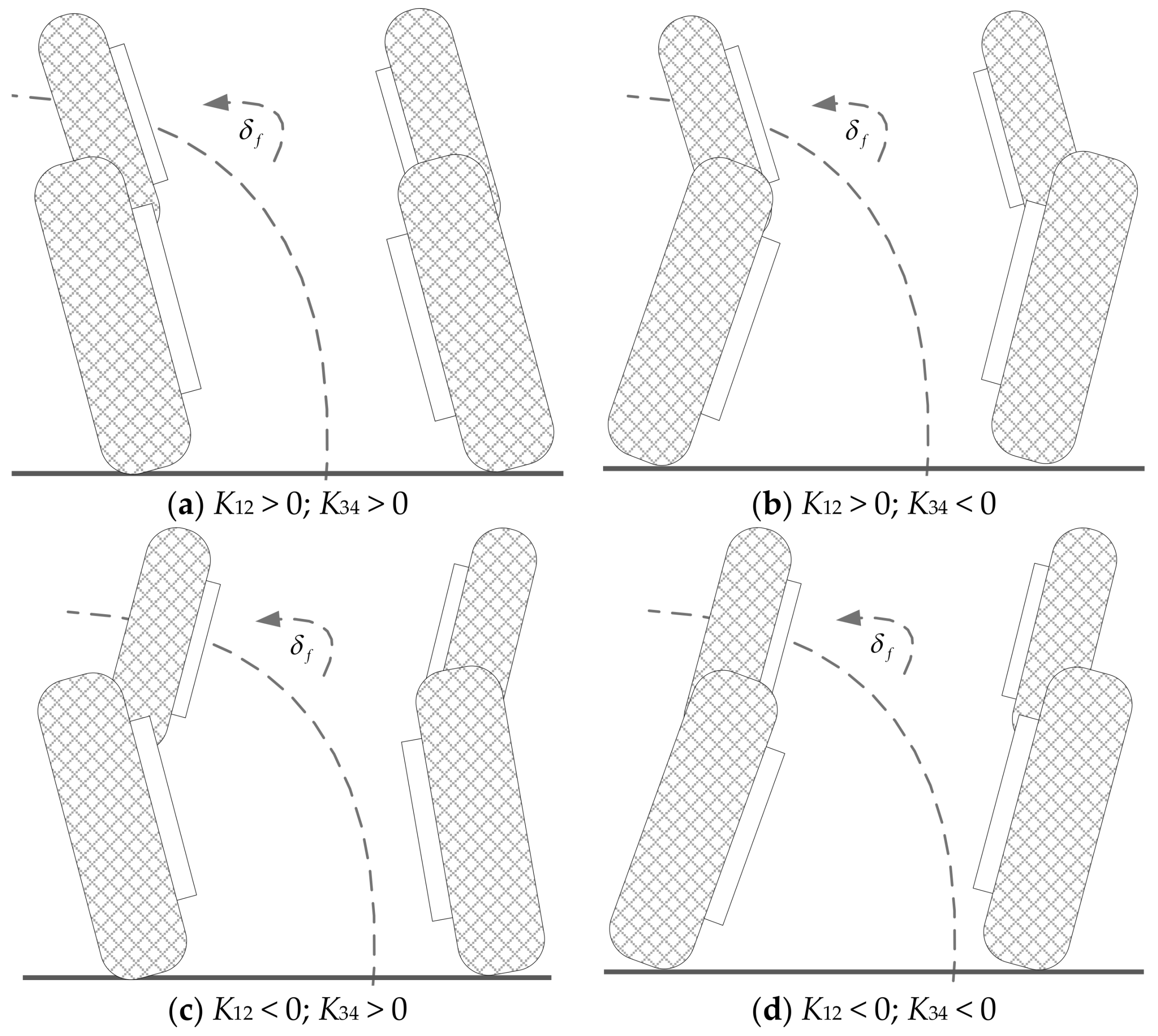
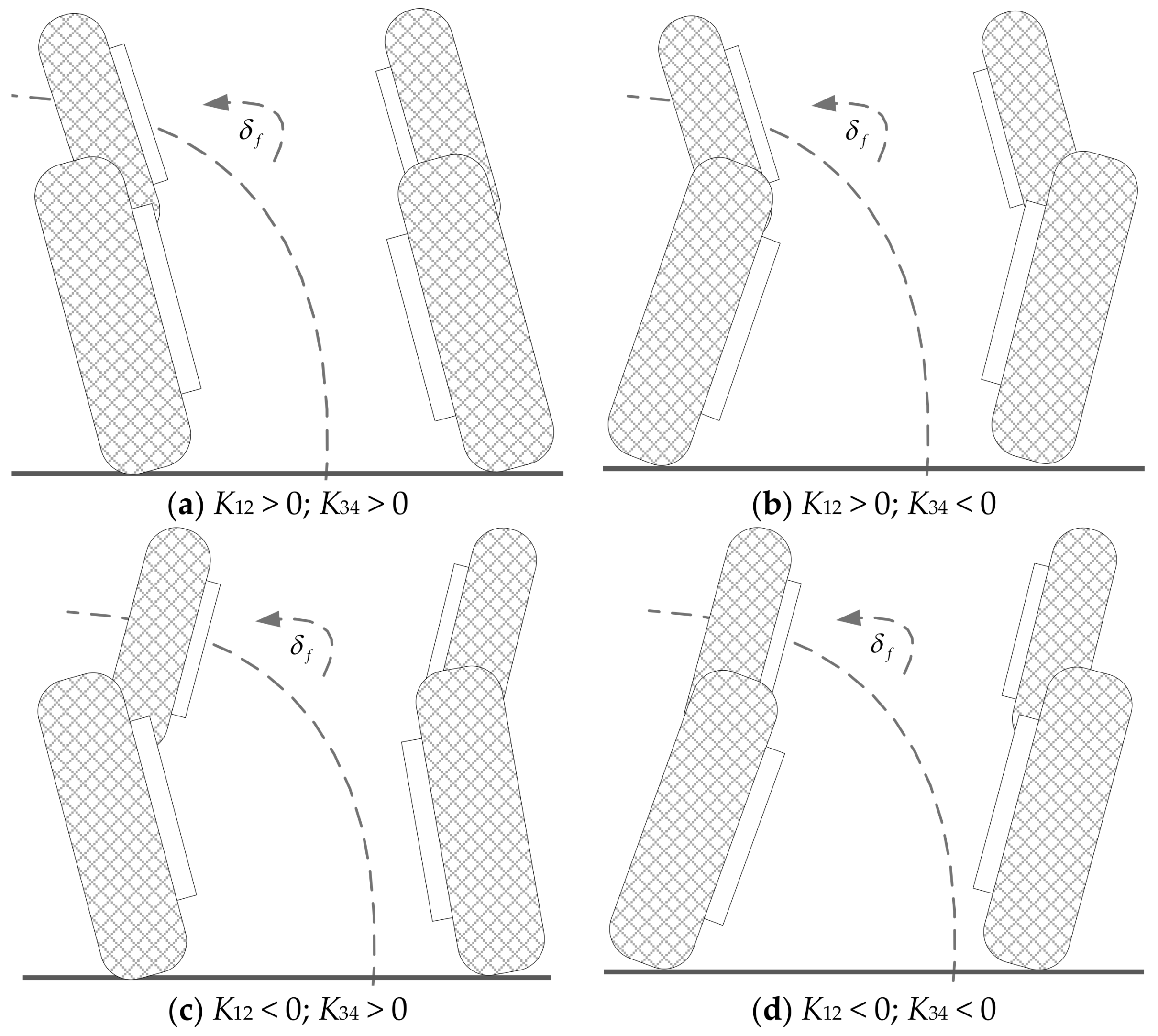
2, the results show that for larger values of
K12 and
K34, more energy can be saved. But for the rest of the lateral accelerations there are maximum energy saving points. Above all, these points are not singular and many combinations of
K12 and
K34 can be chosen for energy saving control.
For the simplicity of the camber control, the same camber angles for the front and the rear tyres are preferred i.e.,
K12 =
K34. To study these assumptions, the combinations of
K12 and
K34 are chosen and the camber angles during the steady-state cornering part are also shown in
Table 8. These combinations are the optimal points or near the optimal ones. It can be seen that for certain
ay during the steady-state cornering, the efficient camber angles are approximately equal.
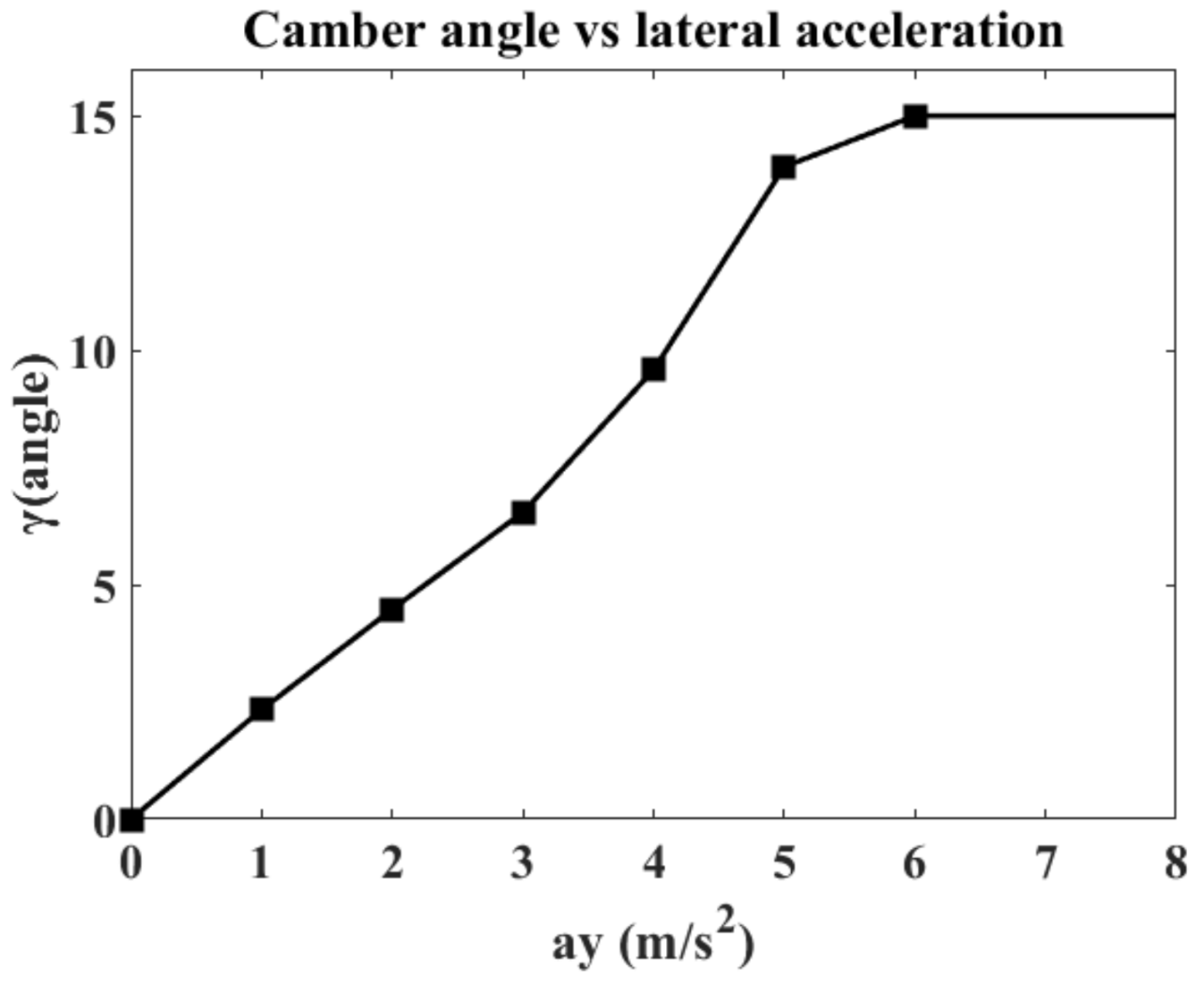
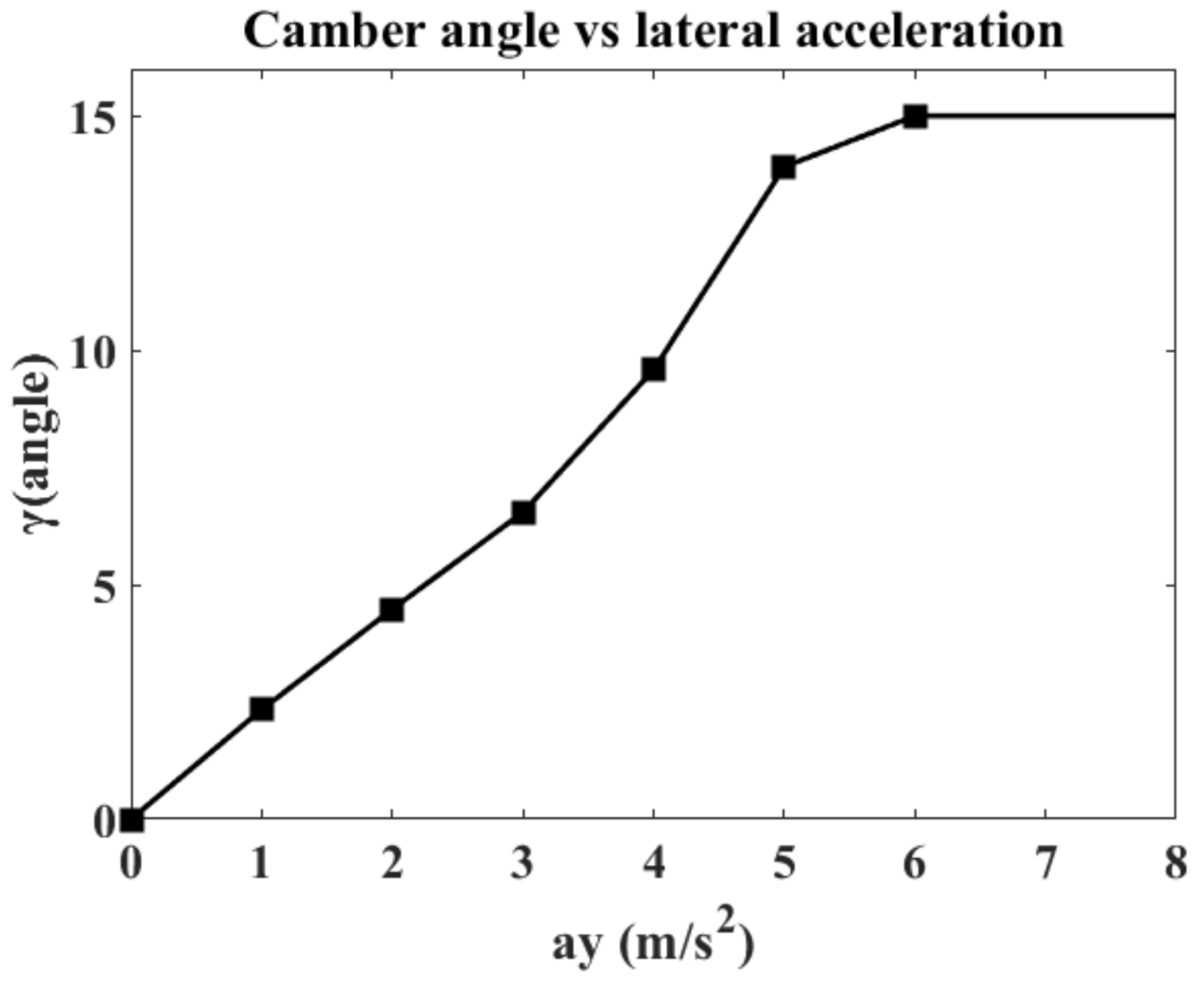
As a consequence, it is assumed that the camber angle can be controlled with the information of
ay. A controller which uses
ay as criteria for the camber control is shown in
Figure 17 and the mean value of the three camber angles in
Table 8 for each lateral acceleration
ay is used. Although, at high lateral accelerations such as 6m/s
2 and above, camber setting larger than 15° may save more energy, the average driver generally drives below 4 m/s
2 and 6 m/s
2 or higher only occurs in extreme situations [
25]. Also with the concern of suspension working space, 15° camber angle is still chosen for lateral acceleration higher than 6 m/s
2 in this work.
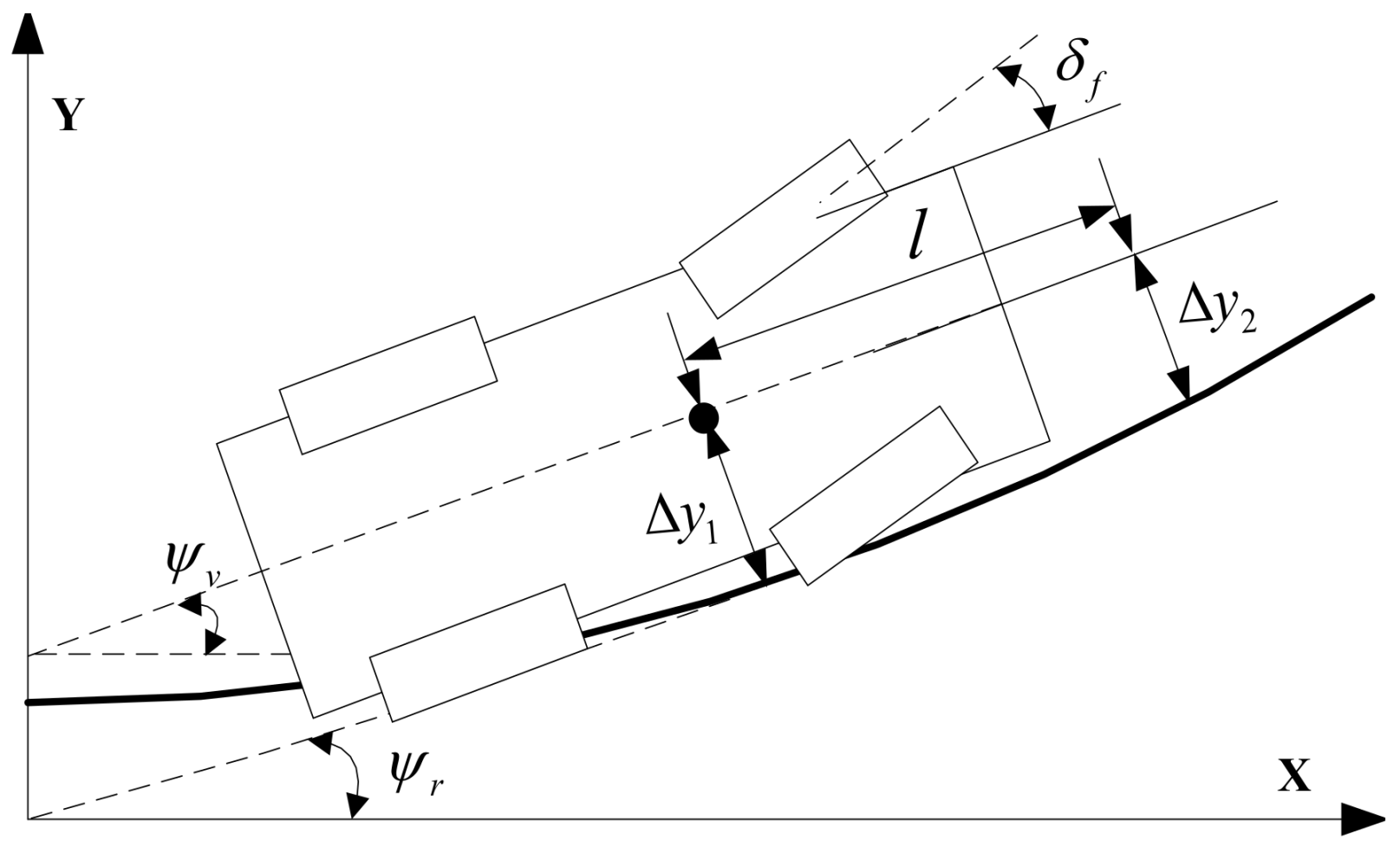
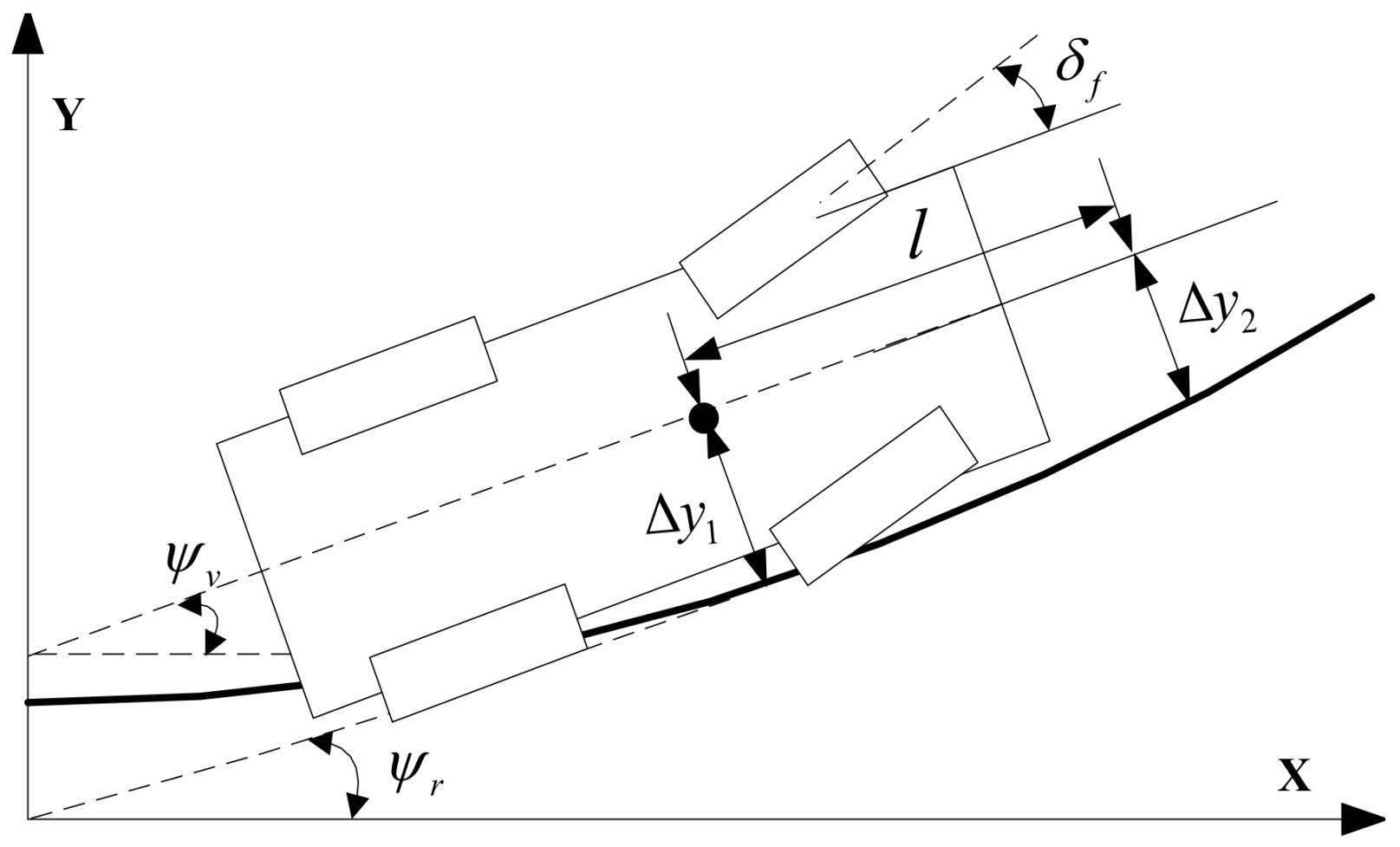
From
Figure 10a and
Figure 11a, although implementing camber control can reduce steering angle, the reduction is small and the linear relation between
δf and
ay for each constant velocity can be regarded to be unchanged. Therefore, a feedforward camber controller based on the information
δf and
Vx is designed for simulation purposes. With the designed camber controller, the percentages of energy saving for the chosen driving scenarios defined in
Table 7 are shown in
Figure 18. The results show that the designed camber controller has a very promising application prospect for energy saving.
6. Conclusions
In order to analyse how a variation in camber angles influences the power loss during cornering, this paper formulates the components of the power loss. Different paths and velocities are designed for evaluation of camber effects. In
Section 4, three combinations of
K12 and
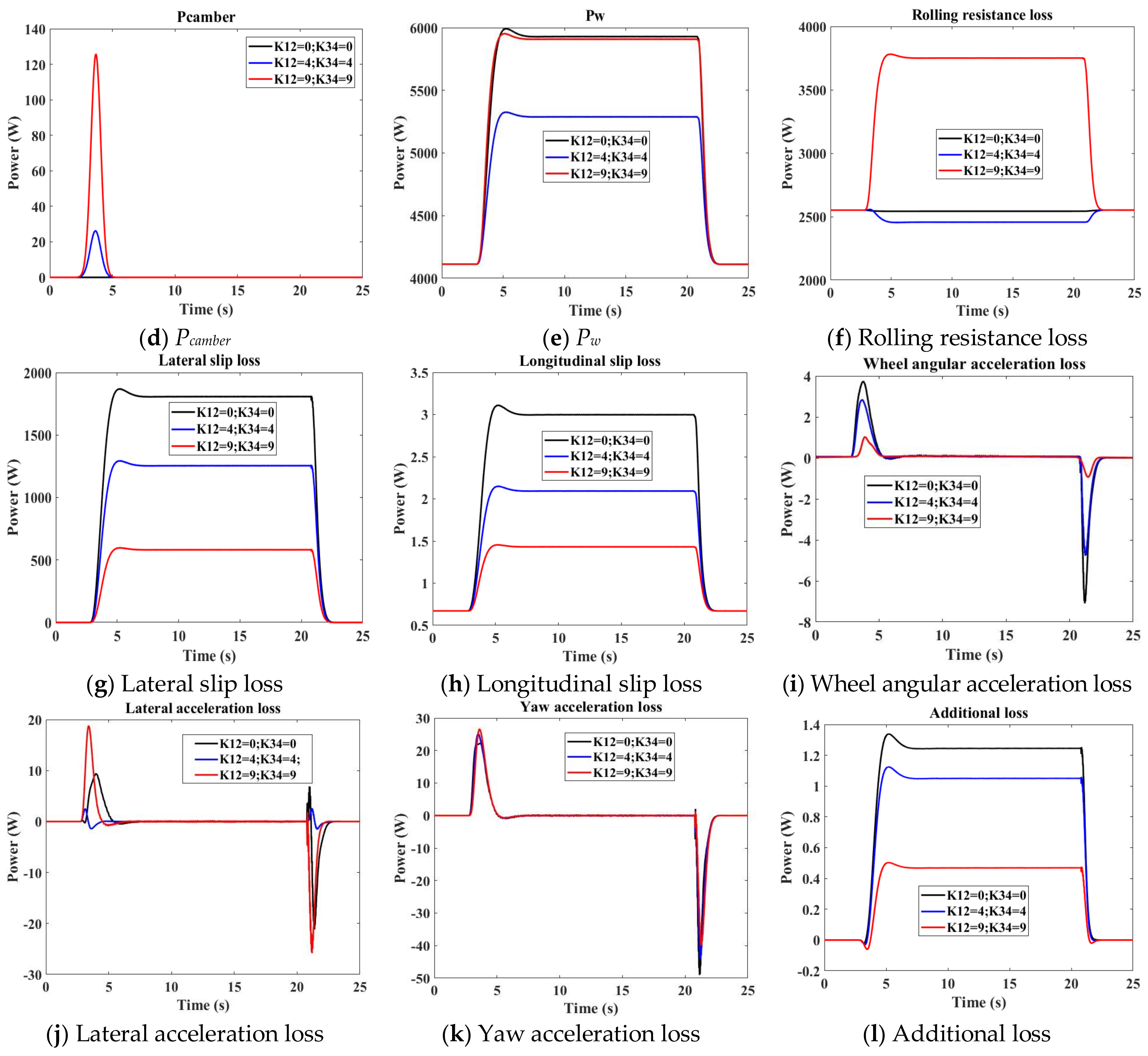
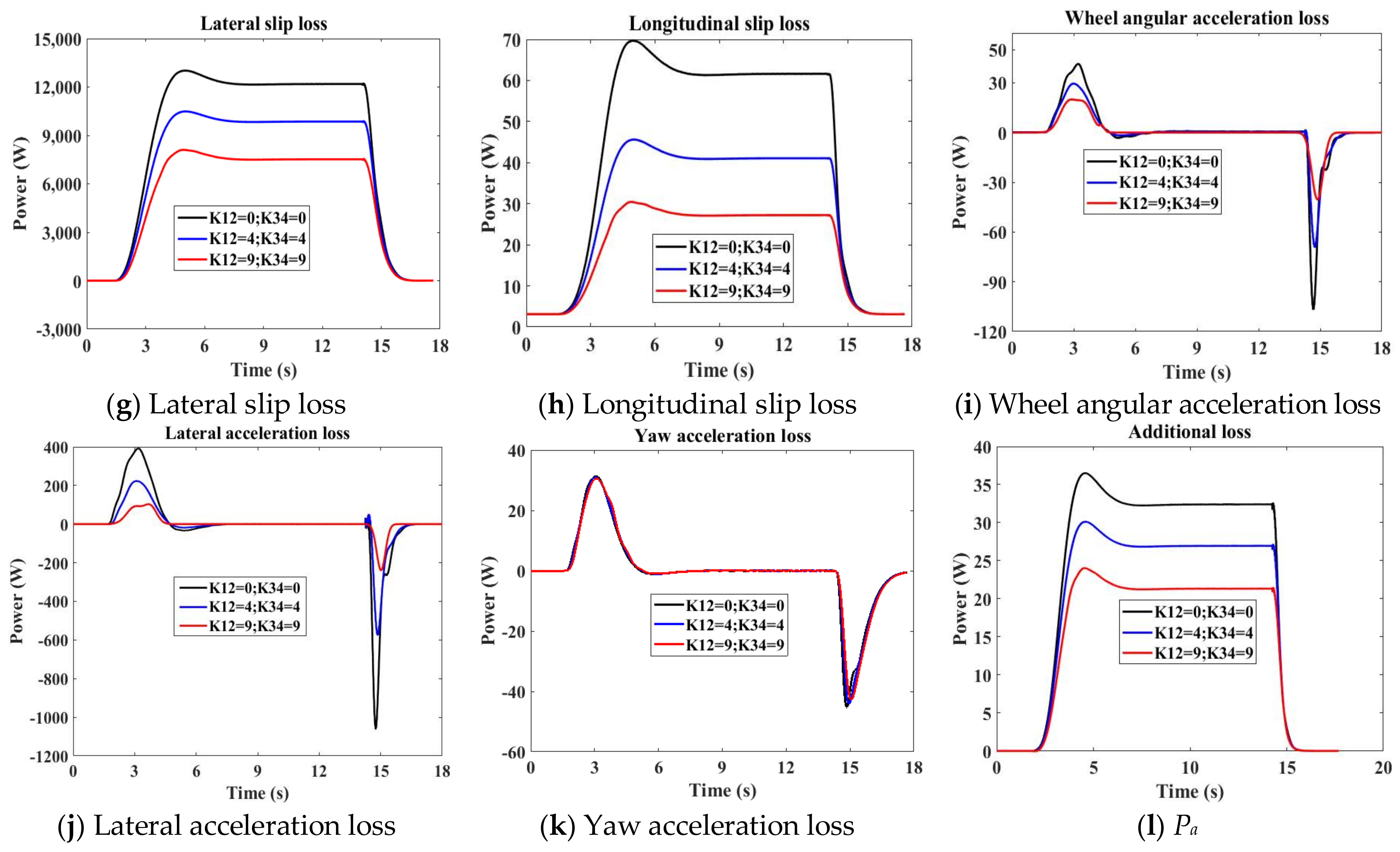
K34, two designed paths and two velocities are primarily studied. With camber control, the components of total power loss, which includes the power for controlling camber, are studied and from the results it is concluded that the three main components are aerodynamic loss, rolling resistance loss and lateral slip loss. For chosen combinations of
K12 and
K34, camber control can reduce lateral slip loss but can also cause different changes in rolling resistance loss. In
Section 5, different combinations of
K12 and
K34, three paths and six velocities (corresponding to six accelerations at steady-state cornering) for each path are further studied.
The contribution of camber angle control to energy saving is obvious when lateral acceleration is high. There are multiple choices of
K12 and
K34 that can have a positive impact. The strategy of implementing the same camber angles for all tyres is chosen to be adopted. From
Table 8, for each lateral acceleration the efficient camber angles are almost equal even if the velocities are different. The camber controller based on lateral acceleration is then developed and the effectiveness of the controller is evaluated. The results show that the proposed control algorithm is promising to save energy during cornering.
In future work, the longitudinal acceleration can be included and the tyre wear change due to camber control also needs to be considered. It is of great interest to explore expected energy saving within the probability density function of driving at various speeds and lateral accelerations with camber control. The change in the stability factors remains to be explored. Camber control is closely related to tyre properties and it is therefore important to know the tyre information before camber control is applied.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}