1. Introduction
Energy produced by ocean waves has not yet become a commercially viable technology because the cost of energy is too high. Therefore, research projects considering wave energy converters are diversified into numerous topics regarding e.g., structural mooring, system controls, power electronics, hydrology and fluid power technology—all with the aim of reducing the cost of energy as reviewed in e.g., [
1].
The heart of a Wave Energy Converter (WEC) is the Power Take-Off (PTO) system which converts the ocean waves into energy. The focus of this paper is the Wave Power Extraction Algorithm (WPEA) i.e., the algorithm that controls the PTO. In general, the WPEA’s objective is to harvest as much energy as possible with a given PTO system. In this connection it is important to distinguish between the mechanical energy absorbed by the PTO and the output energy (typically electrical) that is delivered from the whole WEC system.
In the wide landscape of WEC converter topologies including e.g., overtopping, attenuators, oscillating water columns, point absorbers, this work focuses on the latter: the point absorber WEC is characterized by the float being small compared to the dominant wave length and in addition most point absorber WEC’s are designed to exploit the heave motion of the float. Point absorber based WEC’s come in numerous configurations: some have a single body moving relative to the sea bed or a fixed structure while other absorbers have two floating bodies moving relative to each other. Point absorber WEC’s are often designed for park installation in such a way that multiple absorbers form an array of WEC’s that supply power to the same electrical grid which in turn smooths out the power fluctuations from a single absorber.
Prior research has shown that the amount of absorbed energy depends a lot on the adopted WPEA. A widely used WPEA for point absorbers is the reactive control principle which is both simple and casual. An energy-optimal reactive WPEA strategy for regular waves has been detailed in e.g., [
2]. However, as ocean waves are random the reactive WPEA must be adapted to irregular waves. In [
2] the controller parameters in the reactive WPEA algorithm are updated based on the history of the past wave series in order to adapt to the current sea state. In [
3] the optimal discrete PTO force where investigated for a much simplified WEC, however the method failed for irregular waves.
Recently, WPEA’s based on the idea of Model Predictive Control (MPC) have attained increasing focus from the wave energy research community, see e.g., [
4,
5,
6,
7,
8,
9,
10,
11], and initial results are encouraging: MPC may lead to increased energy output of a WEC compared to e.g., reactive control WPEA. In the early work of [
4,
6,
8], a linear MPC has been developed and simulated on ideal PTO systems harvesting energy of point absorber WEC’s. These papers acknowledge that practical constraints imposed by the PTO system must be studied to a greater extent. Similar conclusions are drawn by [
11], which demonstrates the potentials of MPC in a simulation study of a model-scale point absorber albeit unrealistic performance requirements for the PTO system are obtained due to the simplicity of the used PTO model. [
10] reports a study of both a centralized MPC and decentralized MPCs applied to a small array of three WECs and concludes that MPC can improve the energy absorption compared to a linear fixed damping controller. In this work, the PTO force is assumed to be continuously controllable within upper and lower bounds. In addition, PTO losses are not considered. In [
7] the PTO system model includes a friction term emulating the PTO energy losses—however, no actual PTO system configuration is discussed.
Mainly based on simulation studies, the literature documents that MPC based WPEAs can outperform the classical reactive WPEA with respect to the amount of absorbed energy using the continuously controllable PTO system. To the knowledge of the authors, no investigations of MPC in the context of WEC exist for discrete PTO systems. It may also be noted that the MPC concept allows actuator constraints such as discrete force levels to be taken directly into account. In addition, limits on maximum actuator motion may be included straightforwardly in the optimization problem formulation. It is not clearly documented how this affects the amount of harvested energy.
This paper focuses on MPC applied to a discrete fluid power PTO system based on a secondary controlled multi-chamber cylinder connected to a number of constant pressure lines. In [
12], the conversion efficiency of such a discrete and multi-chamber PTO system is shown to be significantly higher than a conventional PTO system where a symmetrical cylinder feeds a variable displacement motor [
2,
13]. However, such a technology shift from a continuous to a discrete force system necessitates a WPEA capable of generating a control reference according to the quantized nature of such a system and hence the objective of this paper is to develop and investigate the feasibility of a MPC-based WPEA for a discrete PTO system used in a point absorbed WEC.
The paper is organized as follows: first, an overview of the studied system is given and then a dynamic WEC system model (float and PTO) is presented together with models of the wave climate. Next, the configuration of the MPC based WPEA is presented and it is detailed how the prediction model is derived and how the optimization problem is solved. In addition, PTO system energy losses are modeled and included in the optimization problem. Then, results of extensive calculations for different WPEA’s are reported, documenting how the prediction horizon and time step influence the output energy. Furhtermore, comparisons between MPC-based and a reactive algorithm WPEA are reported.
2. Discrete Power Take-Off System
The power take-off topology studied in this paper was proposed for a multiple-point absorber wave energy converter, see [
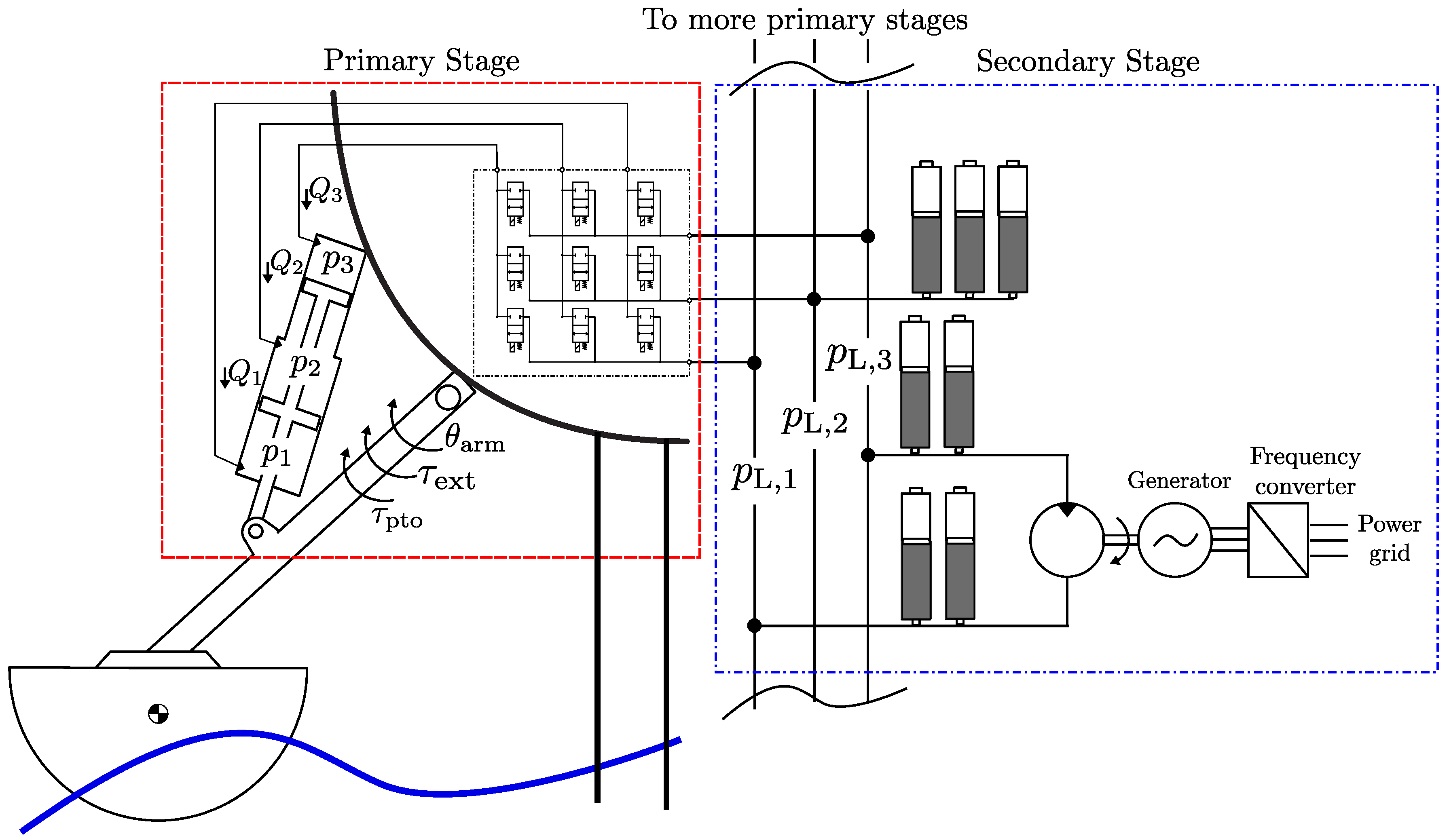
12]. Each absorber is attached to an arm hinged at a fixed structure and in overall terms energy is harvested by the relative motion between the absorber arm and the fixed structure.
Figure 1 illustrates the system. Each set of float arm, multi-chamber cylinder and valve manifold constitutes a unit named a primary stage. As indicated in
Figure 1, multiple primary stages are connected to a common secondary stage consisting of three pressure lines each equipped with a number of accumulators, a fixed displacement fluid power motor, an electrical generator and a frequency converter for grid connection.
A key advantage of such a topology is that inevitable (but phase shifted) variations in the power production of the individual absorbers do not propagate directly into the secondary stage which in turn leads to a more smooth operation of the fluid power motor and the generator.
It may be noted that the two ports of the fluid power motor are connected to the low (
) and high pressure (
) lines, respectively. The intermediate pressure (
) floats and as detailed in [
12] proper secondary control is needed to stabilize this pressure line.
4. Model Predictive Control of Discrete PTO System
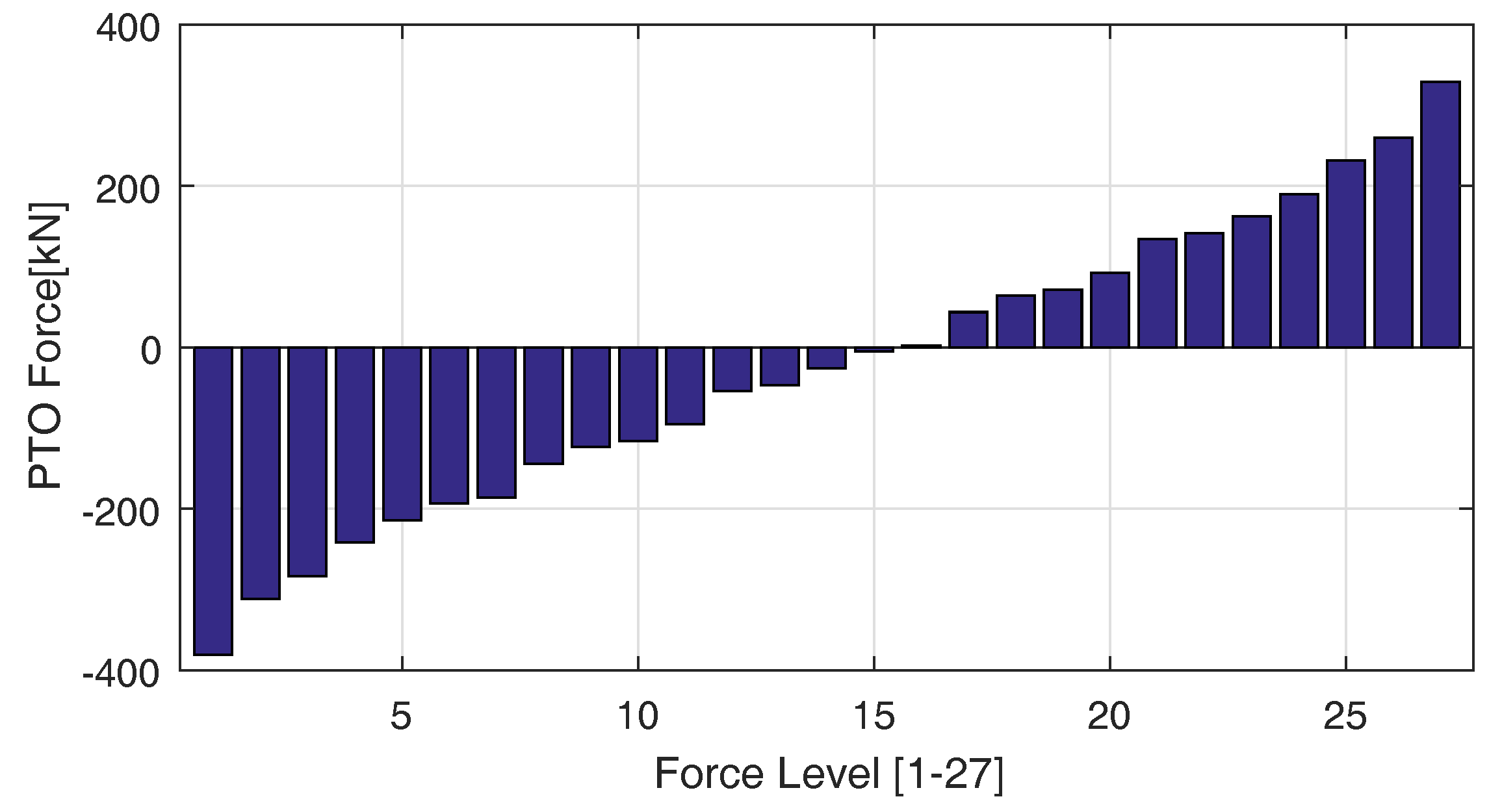
In the context of a PTO system, the overall control problem is to maximize the energy output in (varying) sea states by clever manipulation of the PTO force, which in our case must be selected from a pool of 27 values. Traditionally, a controller is tuned off-line based on ideas such as reactive control [
2] and mapping techniques are used to accommodate quantization of the controller output [
12].
As an alternative to such an indirect approach, to attack both the energy maximization problem and the force level quantization problem, the variant of closed-loop control model known as either receding horizon control or model predictive control has two appealing characteristics for use in a WEC with a discrete PTO system: as detailed in [
15], MPC allows direct handling of constraints such as actuator and state limitations—and also, due to the use of an on-line optimization strategy, MPC should be able to address the energy maximization problem directly during runtime.
The overall idea of MPC is to compute the future controller outputs (i.e., the system inputs) by solving an optimizing problem on each time step of duration . More specifically, the strategy for a discrete-time MPC involves three steps:
Measure (or partially estimate) the full system state at the current sampling time .
Find the
N optimal future system inputs
by solving an optimization problem over a finite time horizon
by using a prediction model to estimate the future system states
based on the initial state
, the future inputs
besides a prior estimates of future disturbances
Apply only the first optimal controller output to the system and loop back to step 1 for the next sampling instant.
Figure 7 illustrates the used notation and the MPC principle: at time
the actual state
is available and an optimal future controller output vector
is determined as outline in Step 2 above. Using
the predicted future state becomes
as shown in the bottom part of
Figure 7. The first element
is immediately applied to the system and as indicated the actual state trajectory may deviate from the prediction leading to another initial state in the next sampling interval starting at
.
In the following subsections, the configuration of the MPC based WPEA is described in detail.
4.1. Prediction Model
Denoting the total input as
the prediction model is the float model in (
6) represented in continuous-time state space as
It may be noted that the PTO system dynamics are not included in (
12) i.e., infinitely fast force development is assumed because the MPC sample time is significantly higher than the force rise time. The prediction of future states are based on a discrete state space model of the float dynamics (
12):
where
relates to controllable input (
) and
is the uncontrollable disturbance (
). In addition,
A,
B and
C are the discrete representation of the system matrices of (
12) using a zero order hold discretization with the sample time equal to
. The angular velocity of the float arm is set to be the system output. By using (
13) recursively, the future states in the prediction horizon may be expressed by the system matrices, the initial state and the future system inputs
and disturbances
as:
The future system outputs
may be stated as:
By decomposing the total system input into the excitation torque and the torque applied by the PTO system, the future states may be reformulated as
Hence, (
16) related the future states
to the initial state
at time
and to the controller output vector
under the assumption that the disturbance
are known in the whole time horizon
.
4.2. MPC Objective Functions
The main task is to maximize the absorbed PTO energy. Using (
15) and (
16), the total energy
absorbed during the prediction horizon
may be approximated by backward Euler integration of the instantaneous power:
where it may be recalled that
is a function of
The objective function to be maximized is defined as
and the optimization problem is then formulated as
subjected to the constraints that all elements in
must belong to the set of 27 possible values dictated by the discrete PTO system. The optimization problem is solved by a differential evolution algorithm originating from the work of [
16] and refined in e.g., [
17].
As part of the initial feasibility study of MPC for PTO systems, a force-continuous MPC version has been studied, where the allowable forces are not constrained to a discrete set. Instead, a simple bound
for any
k is adopted. In this continuous case the optimization problem may be solved by standard quadratic methods, by rephrasing the absorbed power (
17) into a quadratic form:
where
and
.
4.3. MPC Objective Functions—Included Losses
The problem (
19) does not take the system losses into account which may lead to suboptimal performance from an energy harvesting point of view. As elaborated in the next subsection, the two main loss phenomena are (i) losses
associated with shifting of the PTO force from one level to another and (ii) throttling losses
. Therefore, two alternative MPC strategies are investigated based on the objective functions
The three outlined MPC strategies are compared in
Section 5 once loss models have been established below.
4.4. Loss Models
The losses in the primary stages of the PTO system may be separated into three parts: mechanical friction in the PTO cylinder, loss associated with shifting the pressure inside each cylinder chamber and throttling losses associated with the displacement flow. In the current work, the mechanical friction in the PTO is neglected. The energy loss associated with shifting the chamber pressure from one value to another by switching the chamber to a new pressure line through a valve was analyzed in [
18] and this work is used as a starting point for the loss models introduced below.
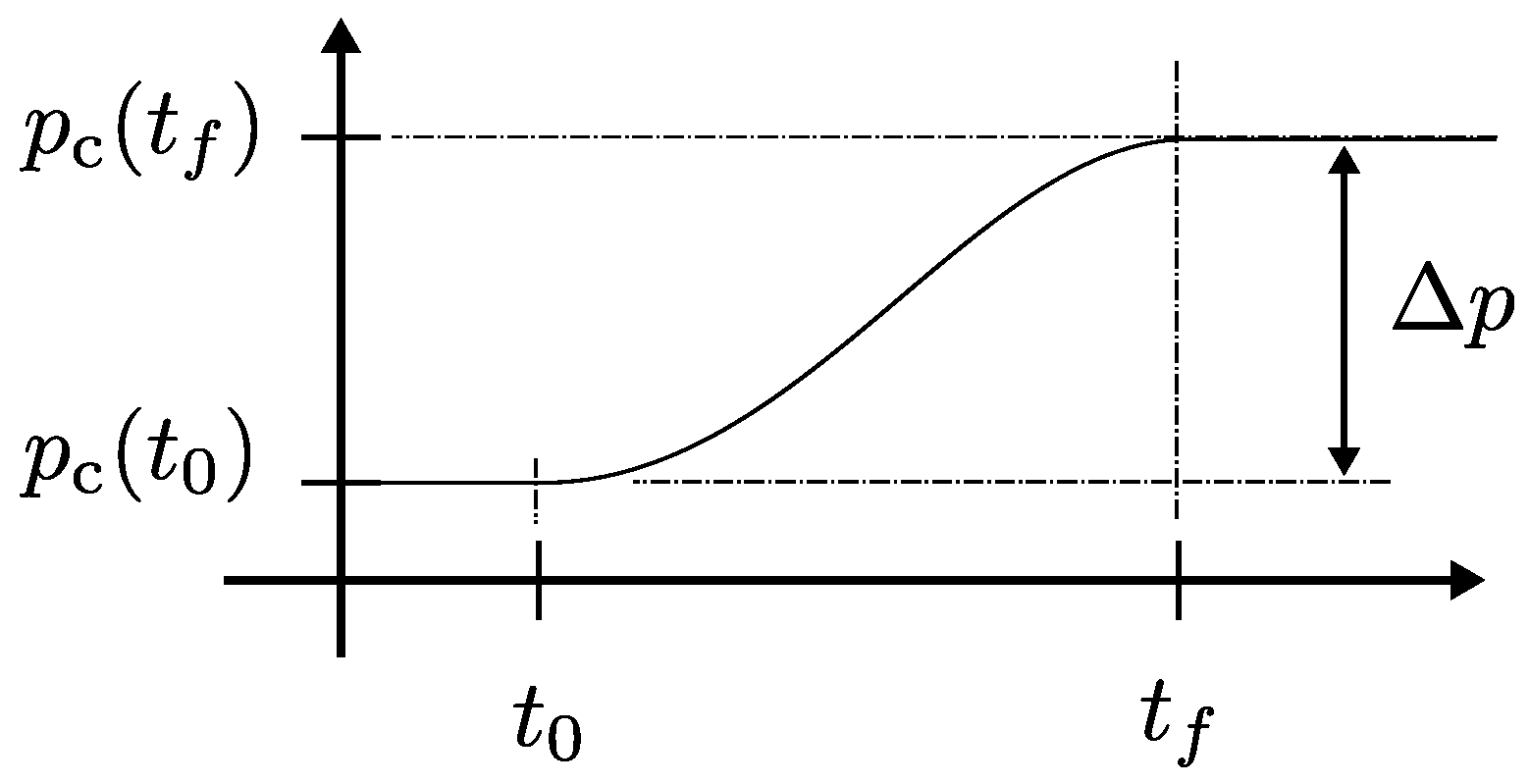
A pressure shift is performed by controlling the valve during the shifting time
such a third order chamber pressure profile appears as illustrated in
Figure 8. The cylinder volume rate of change is assumed constant during the pressure shifting time such that
i.e., the piston velocity is assumed constant during the pressure shifting time
.
The energy loss for a pressure shift of
is in [
18] shown to be:
To include the shifting losses in the MPC objective functions it should be stated as a function of the quantized force levels. Using (
24) for all three chambers, the total shifting loss in the prediction horizon
may then be stated as:
where
is the pressure in the
i’th chamber at time instant
n found using a lookup table mapping the force level to corresponding chamber pressures. In addition, in (
25)
is the
ith chamber volume in the
nth prediction step.
relates geometrically to the arm angle
as seen in
Figure 1.
To calculate the steady state throttle losses, it may be noted that for each chamber
, three valves are used to connect to the low, medium, and high pressure lines, respectively. In practice the three valves belonging to the same pressure chamber are identical i.e., these three valves all have the same flow coefficient labeled
. Knowing the flow into the
ith chamber, the throttling power losses associated with that flow is
, independently of which pressure line the chamber is connected to. The total throttle loss for all chambers may thus be expressed as
where
defines the total loss coefficient.
Table 2 lists the chamber areas
and flow coefficients
.
Using a backward Euler approximation, the total throttle energy loss in the whole prediction horizon may now be calculated by
where
is the piston velocity in the
nth prediction step. Note that
may be calculated straightforwardly once the arm angular velocity
has been calculated by the prediction model when the geometry (
Figure 1) is known.
6. Conclusions
The study presented in this paper clearly indicates that a MPC based WPEA is capable of improving the energy output of a WEC using a discrete fluid power PTO system. Especially, it is concluded that the inclusion of energy losses in the conversion system is of utmost importance because the optimal PTO force depends highly on the PTO system losses.
Under the assumption that incoming wave is known, the MPC algorithm excels compared to the reactive algorithm with its ability to adapt on-line to the incoming irregular waves and the inherent inclusion of the quantized PTO system.
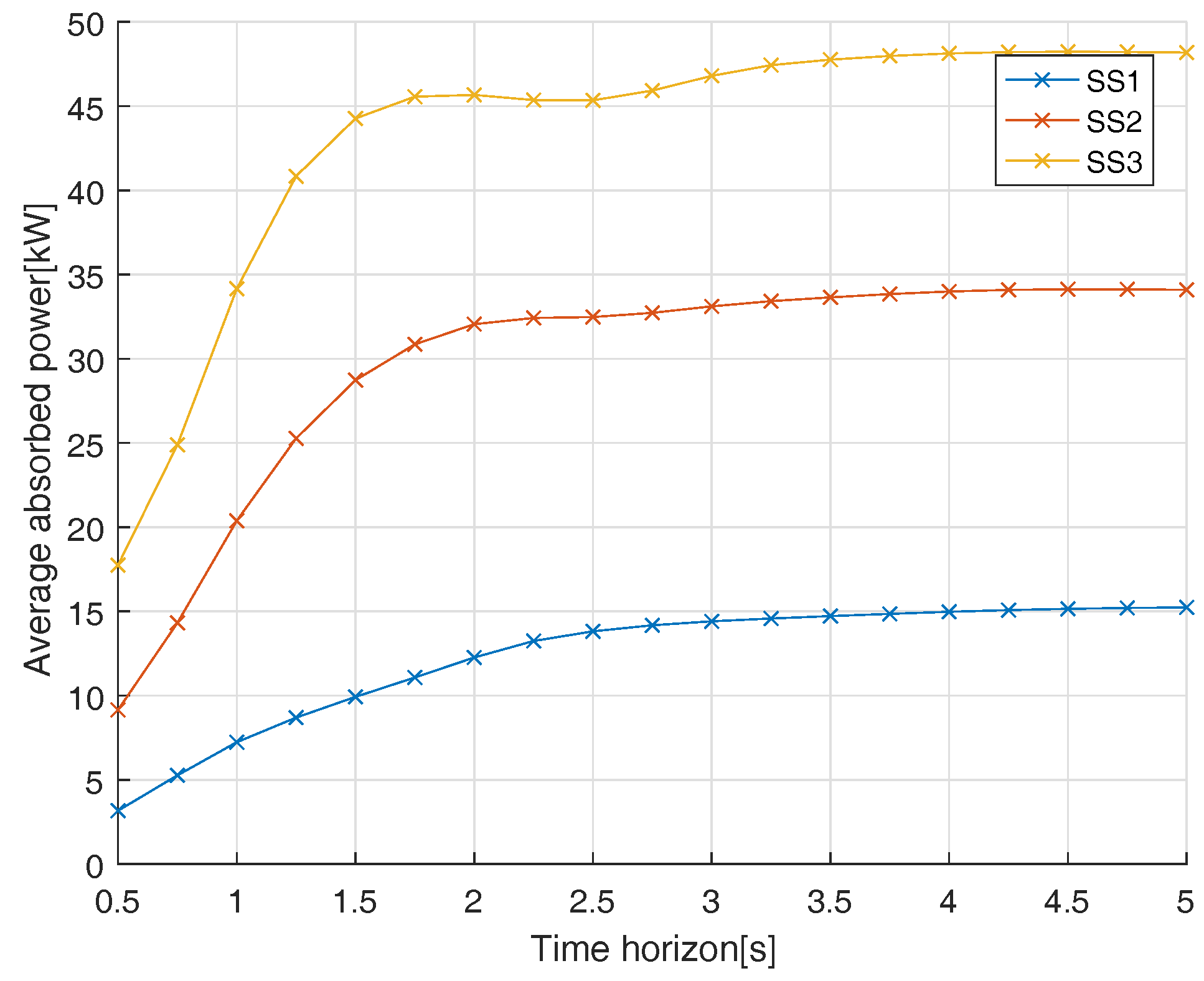
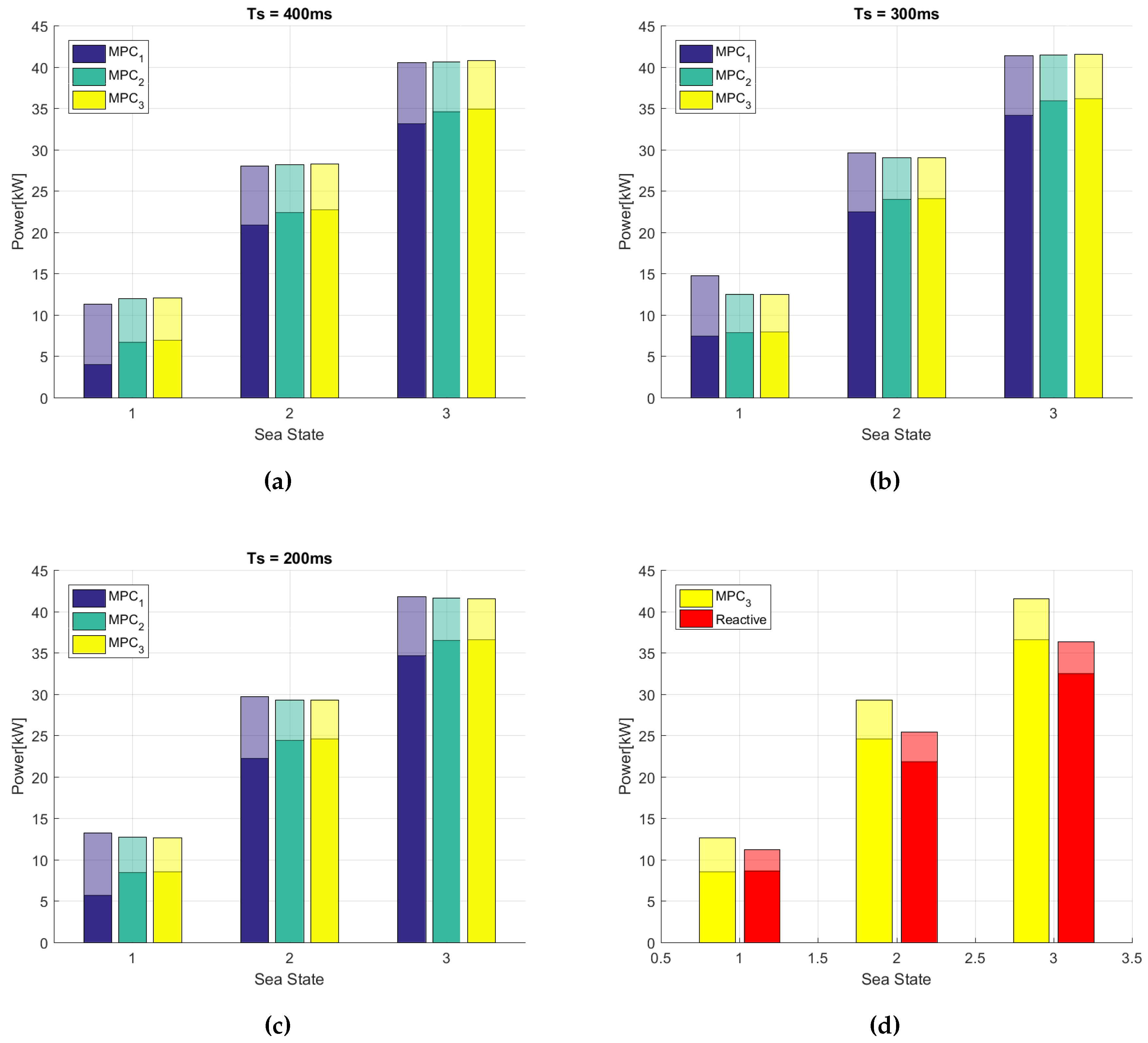
The investigation points out that a step time as short as possible is preferable whereas a prediction horizon above 5 s seems futile.
In conclusion, model predictive control based wave power extraction algorithms appear favorable for wave energy converters utilizing discrete fluid power PTO system. Future research is directed toward the practical real-time implementation of MPC, including studies of model complexity reductions and optimization algorithm implementation. This will be investigated using the test facility described in [
19,
20]. Furthermore, the required accuracy of the wave prediction algorithm is a topic of great importance.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}