Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System

 ,
,  and
and
Abstract
:1. Introduction
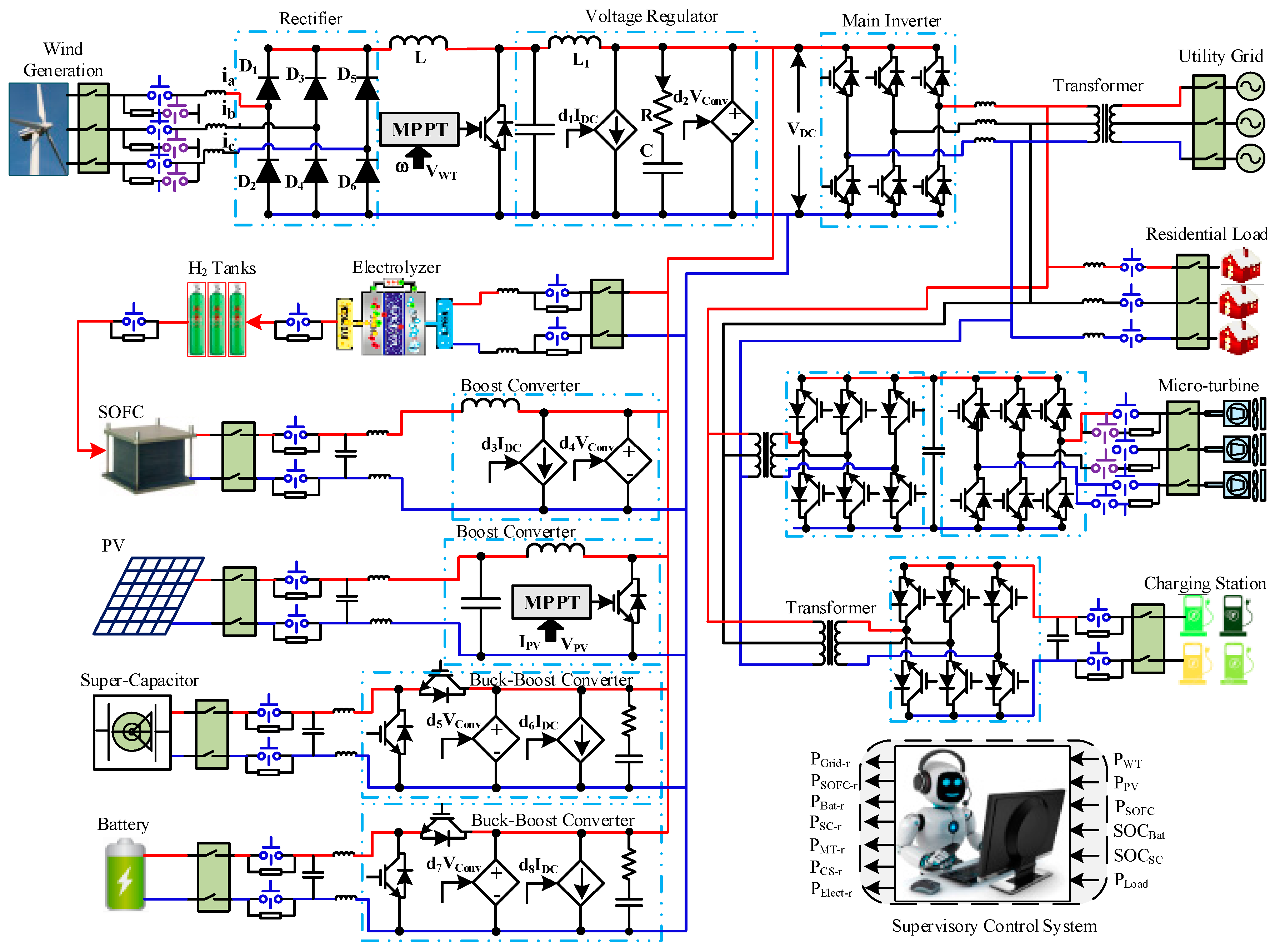
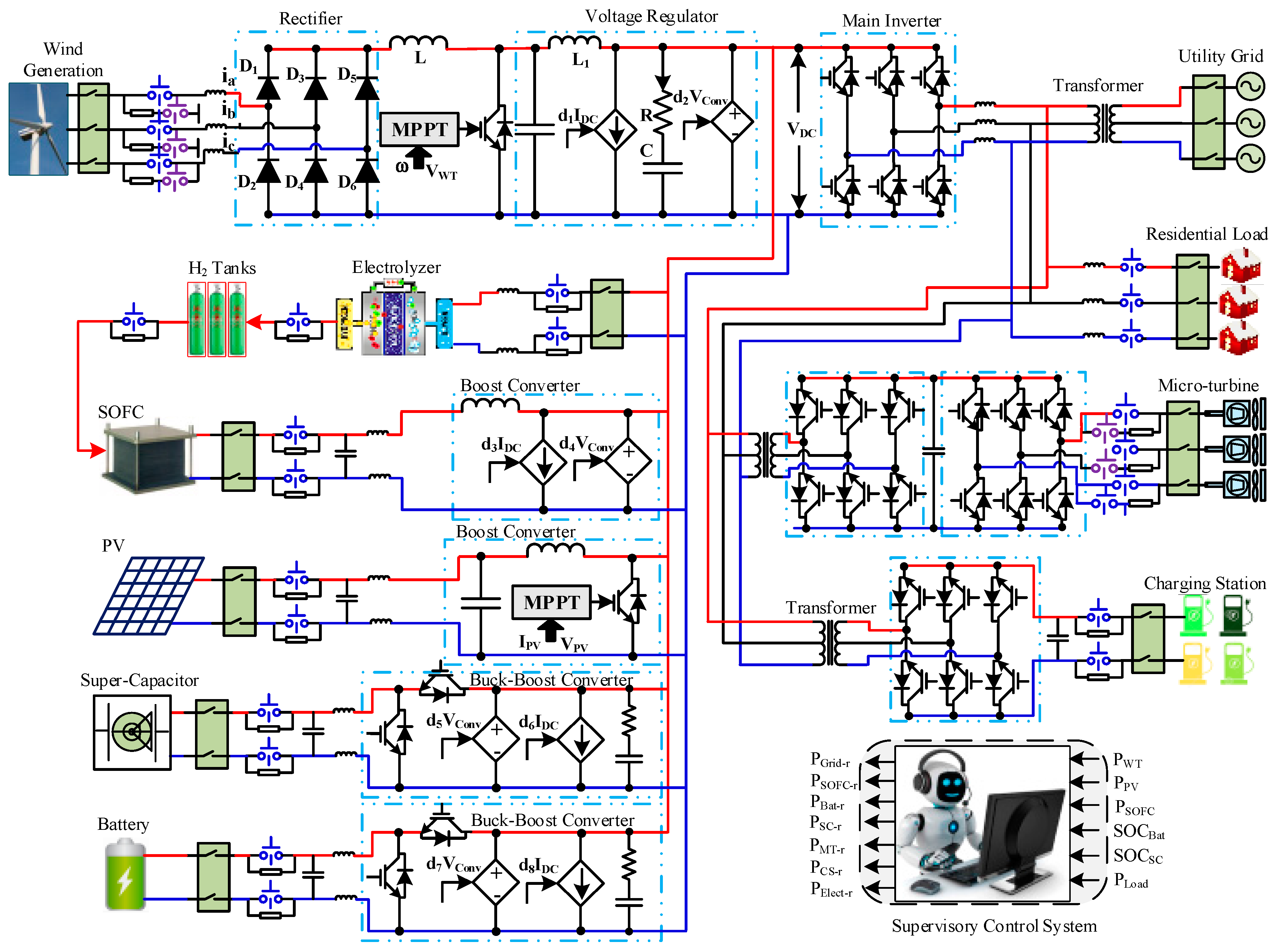
2. HRES Configuration and Problem Formulation
Problem Formulation
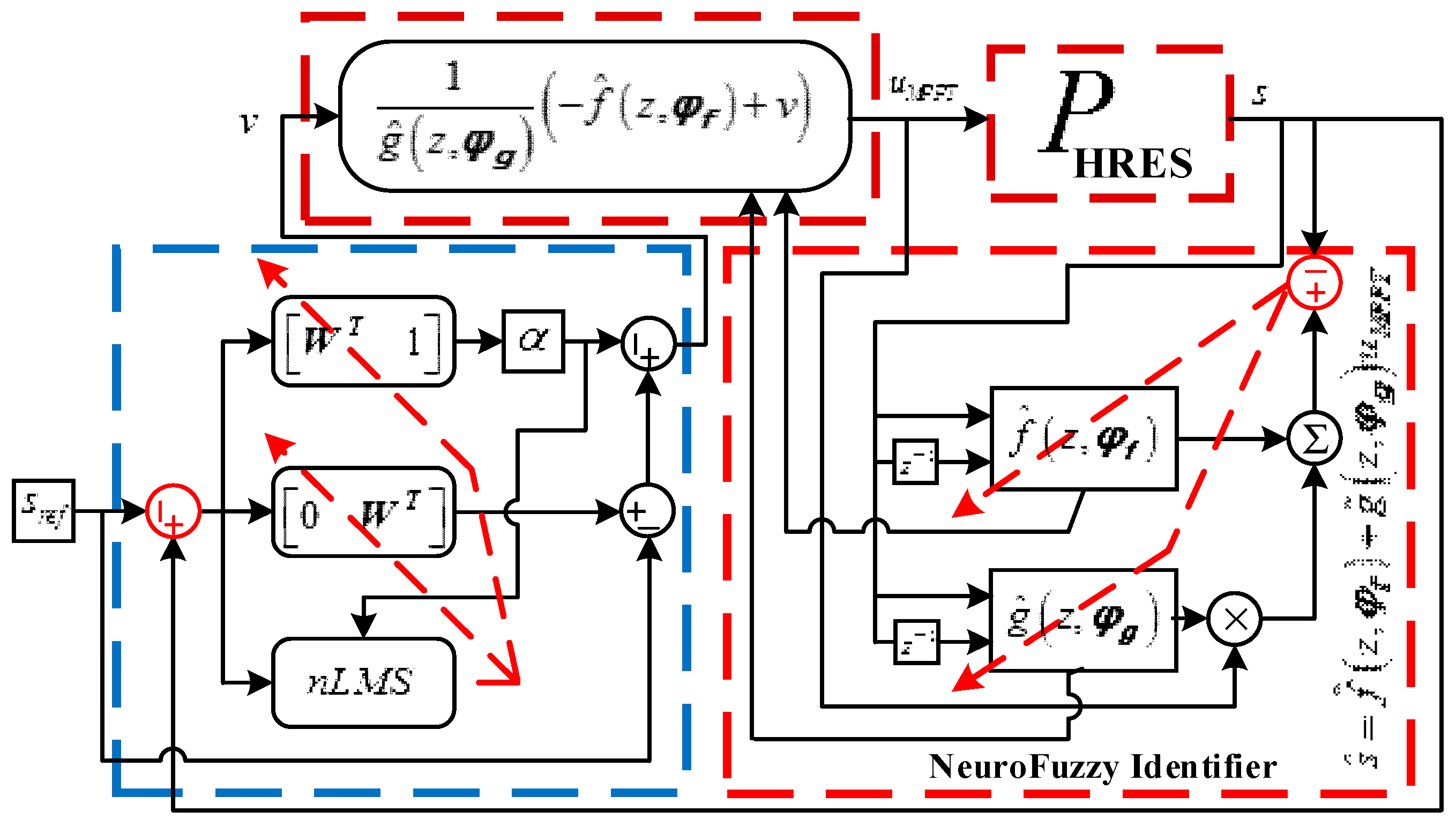
3. Adaptive Feedback Linearization Based NeuroFuzzy MPPT for PV Subsystem
3.1. Adaptive Feedback Linearization Control Law Design
3.2. Adaptive NeuroFuzzy Identification
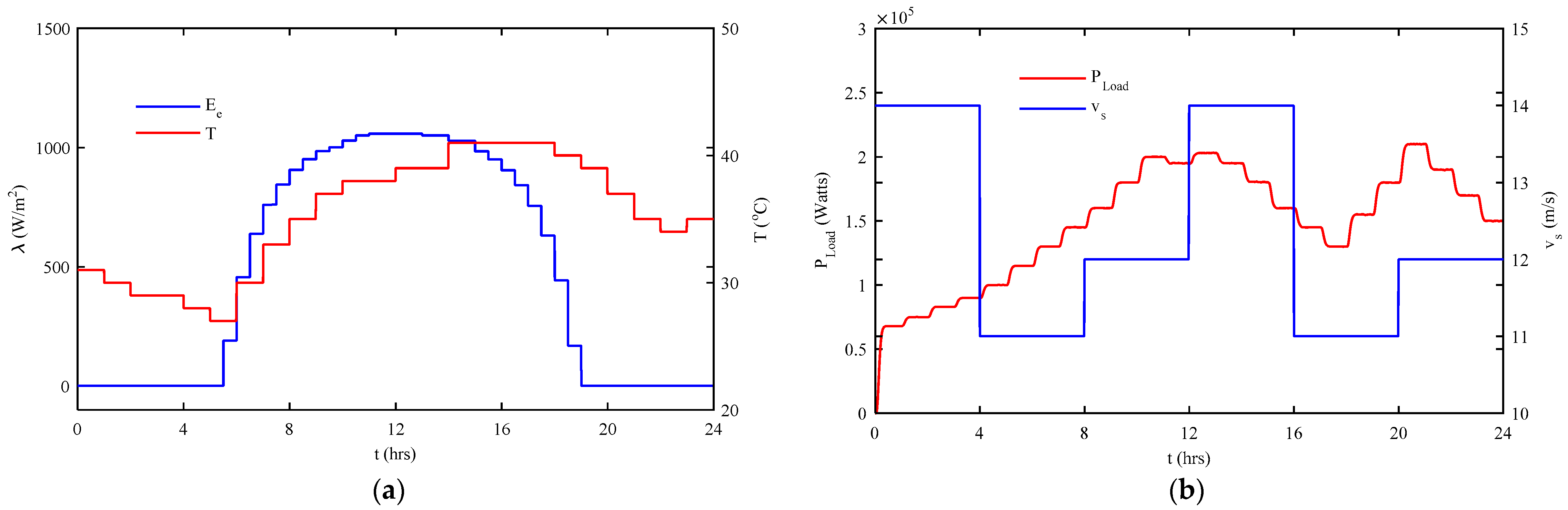
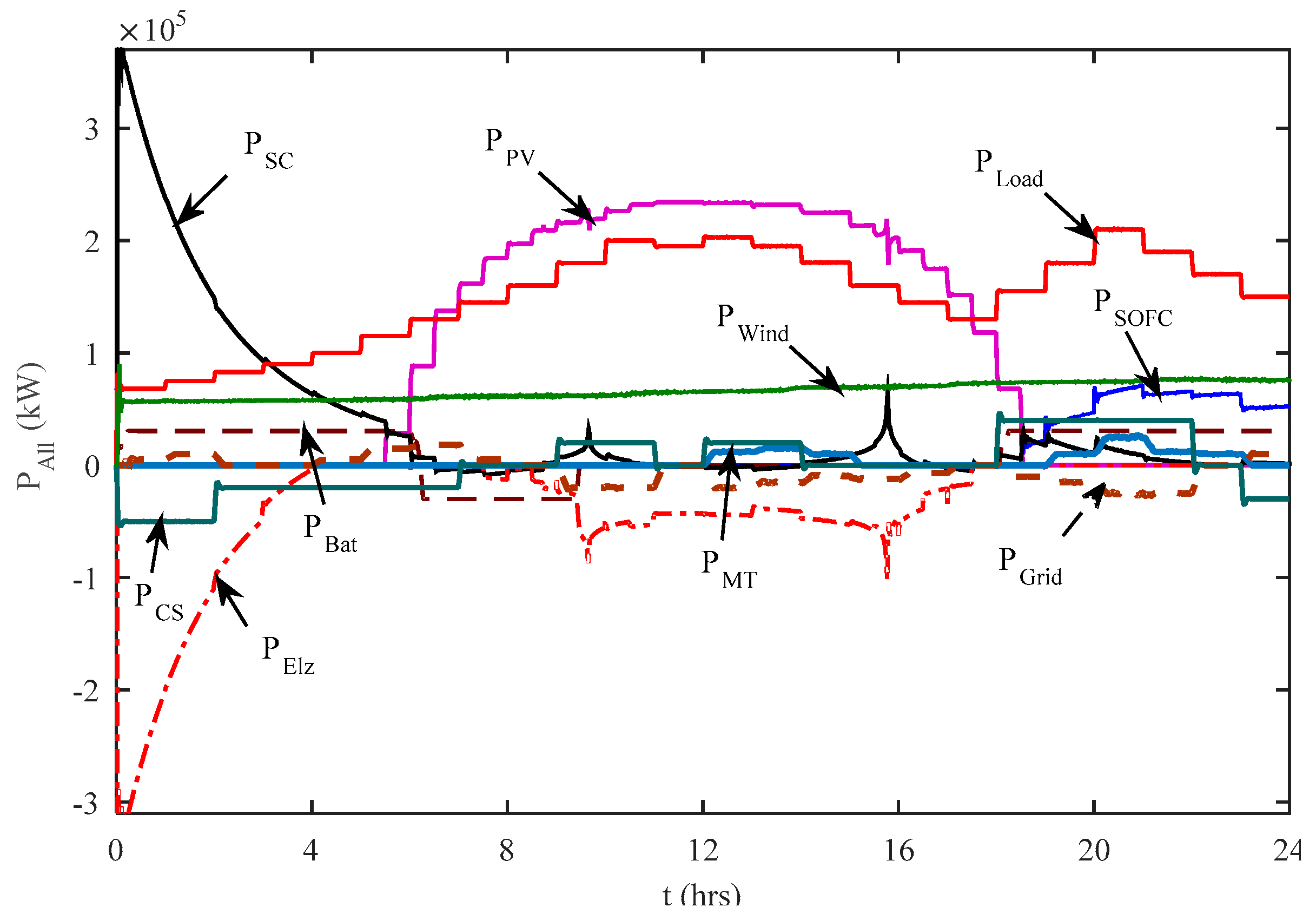
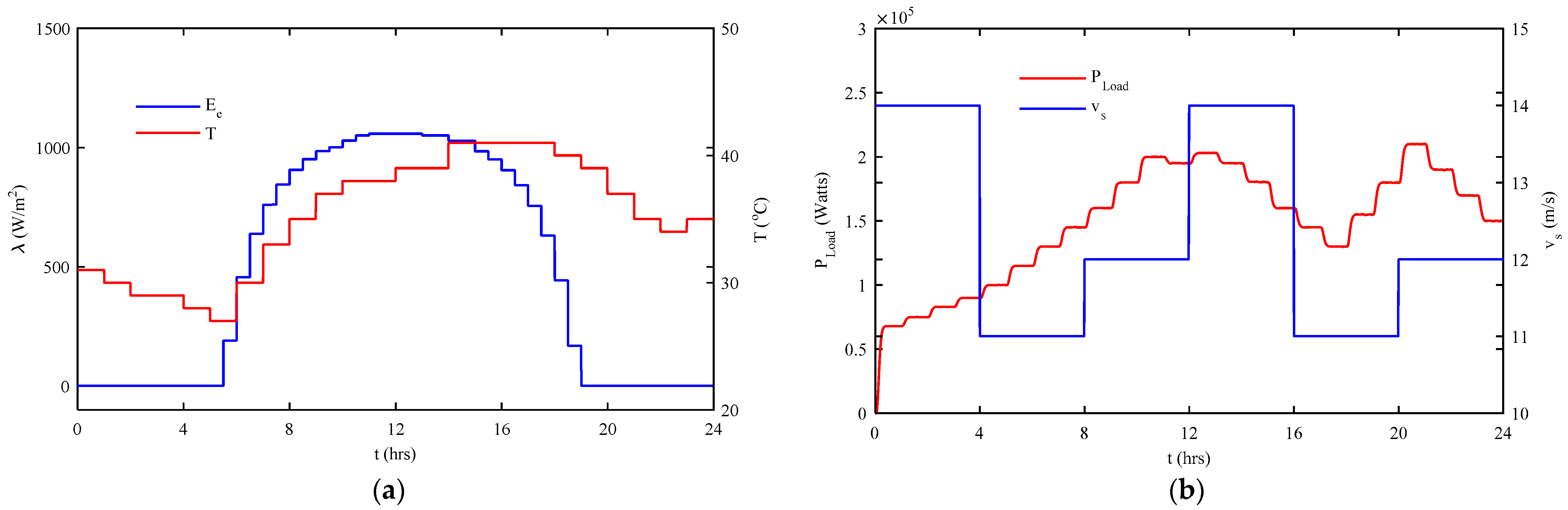
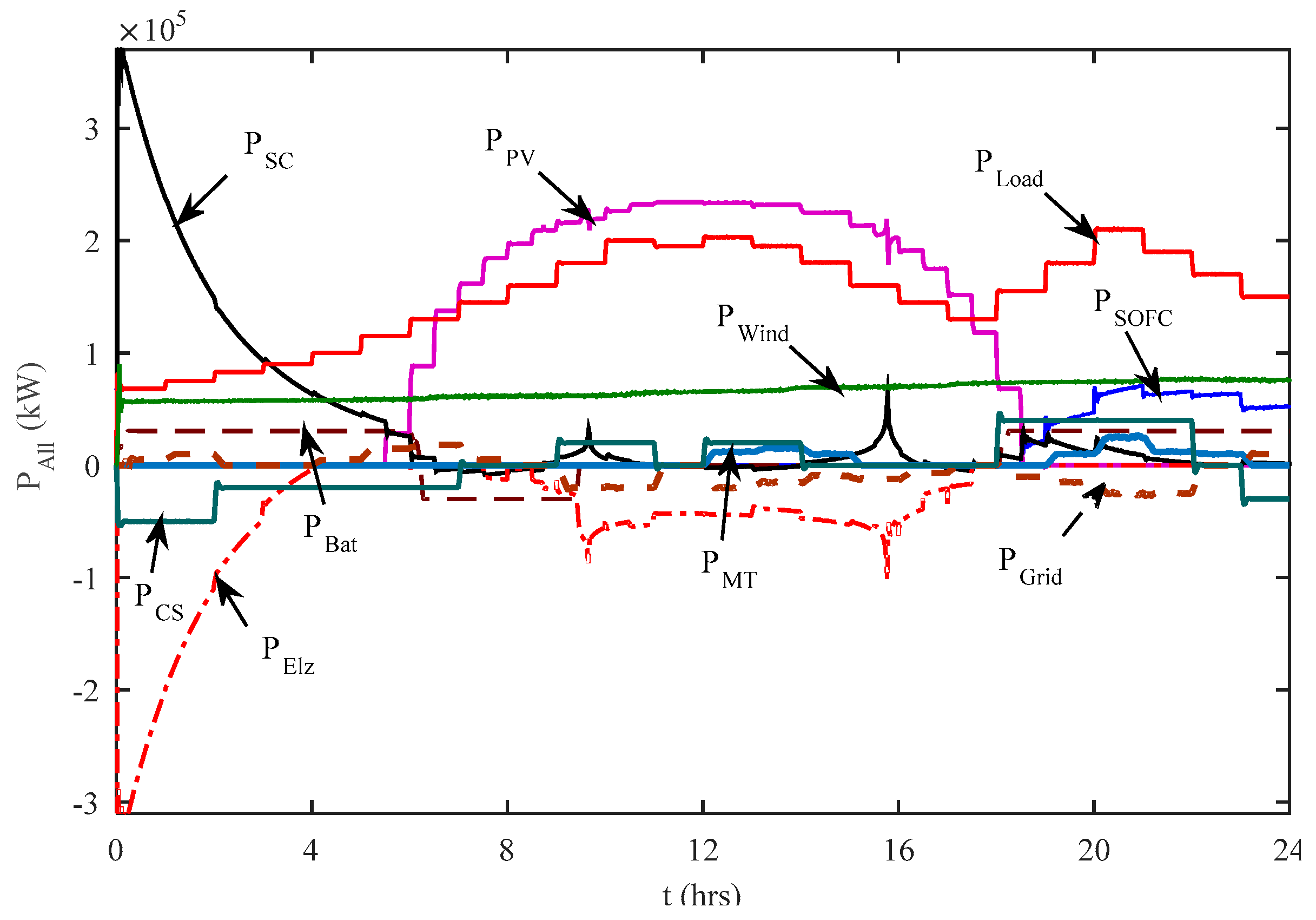
4. Results and Discussion Massachusetts
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
nLMS Algorithm
References
- Mahmud, M.A.; Pota, H.R.; Hossain, M.J.; Roy, N.K. Robust partial feedback linearizing stabilization scheme for three-phase grid-connected photovoltaic systems. IEEE J. Photovolt. 2014, 2, 423–431. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L. Indirect adaptive neurofuzzy Hermite wavelet based control of PV in a grid-connected hybrid power system. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 4341–4353. [Google Scholar] [CrossRef]
- Devi, V.K.; Premkumar, K.; Beevi, A.B.; Ramaiyer, S. A modified Perturb & Observe MPPT technique to tackle steady state and rapidly varying atmospheric conditions. Sol. Energy 2017, 157, 419–426. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified incremental conductance MPPT algorithm to mitigate inaccurate responses under fast-changing solar irradiation level. Sol. Energy 2014, 101, 333–342. [Google Scholar] [CrossRef]
- Sivakumar, P.; Kader, A.A.; Kaliavaradhan, Y.; Arutchelvi, M. Analysis and enhancement of PV efficiency with incremental conductance MPPT technique under non-linear loading conditions. Renew. Energy 2015, 81, 543–550. [Google Scholar] [CrossRef]
- Gokmen, N.; Karatepe, E.; Ugranli, F.; Silvestre, S. Voltage band based global MPPT controller for photovoltaic systems. Sol. Energy 2013, 98, 322–334. [Google Scholar] [CrossRef]
- Dousoky, G.M.; Shoyama, M. New parameter for current-sensorless MPPT in grid-connected photovoltaic VSIs. Sol. Energy 2017, 143, 113–119. [Google Scholar] [CrossRef]
- Giustiniani, A.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Low-frequency current oscillations and maximum power point tracking in grid-connected fuel-cell-based systems. IEEE Trans. Ind. Electron. 2010, 57, 2042–2053. [Google Scholar] [CrossRef]
- Sun, Y.; Li, S.; Lin, B.; Fu, X.; Ramezani, M.; Jaithwa, I. Artificial Neural Network for Control and Grid Integration of Residential Solar Photovoltaic Systems. IEEE Trans. Sustain. Energy 2017, 8, 1484–1495. [Google Scholar] [CrossRef]
- Sundarabalan, C.K.; Selvi, K.; Kubra, K.S. Performance investigation of fuzzy logic controlled MPPT for energy efficient solar PV systems. Lect. Notes Electr. Eng. 2015, 326, 761–770. [Google Scholar] [CrossRef]
- Daraban, S.; Petreus, D.; Morel, C. A novel MPPT (maximum power point tracking) algorithm based on a modified genetic algorithm specialized on tracking the global maximum power point in photovoltaic systems affected by partial shading. Energy 2014, 74, 374–388. [Google Scholar] [CrossRef]
- Babu, T.S.; Rajasekar, N.; Sangeetha, K. Modified particle swarm optimization technique based maximum power point tracking for uniform and under partial shading condition. Appl. Soft Comput. 2015, 34, 613–624. [Google Scholar] [CrossRef]
- Lalili, D.; Mellit, A.; Lourci, N.; Medjahed, B.; Berkouk, E.M. Input output feedback linearization control and variable step size MPPT algorithm of a grid-connected photovoltaic inverter. Renew. Energy 2011, 36, 3282–3291. [Google Scholar] [CrossRef]
- Lalili, D.; Mellit, A.; Lourci, N.; Medjahed, B.; Boubakir, C. State feedback control and variable step size MPPT algorithm of the three-level grid-connected photovoltaic inverter. Sol. Energy 2013, 98, 561–571. [Google Scholar] [CrossRef]
- Lu, Q.; Sun, Y.; Mei, S. Nonlinear Control Systems and Power System Dynamics; Springer Science & Business Media: New York, NY, USA, 2013; Volume 10, p. 376. [Google Scholar] [CrossRef]
- Eriksson, R.; Soder, L. On the coordinated control of multiple HVDC links using input–output exact linearization in large power systems. Int. J. Electr. Power Energy Syst. 2012, 43, 118–125. [Google Scholar] [CrossRef]
- Alonge, F.; Cirrincione, M.; Pucci, M.; Sferlazza, A. Input–output feedback linearization control with on-line MRAS-based inductor resistance estimation of linear induction motors including the dynamic end effects. IEEE Trans. Ind. Appl. 2016, 52, 254–266. [Google Scholar] [CrossRef]
- Liutanakul, P.; Pierfederici, S.; Meibody-Tabar, F. Application of SMC with I/O feedback linearization to the control of the cascade controlled-rectifier/inverter-motor drive system with a small dc-link capacitor. IEEE Trans. Power Electr. 2008, 23, 2489–2499. [Google Scholar] [CrossRef]
- Korayem, M.H.; Yousefzadeh, M.; Manteghi, S. Dynamics and input–output feedback linearization control of a wheeled mobile cable-driven parallel robot. Multibody Syst. Dyn. 2017, 40, 55–73. [Google Scholar] [CrossRef]
- Kim, J.; Croft, E.A. Full-State Tracking Control for Flexible Joint Robots with Singular Perturbation Techniques. IEEE Trans. Control Syst. Technol. 2017, PP, 1–11. [Google Scholar] [CrossRef]
- Ahmad, S.; Khan, L. Performance Analysis of Conjugate Gradient Algorithms Applied to the Neuro-Fuzzy Feedback Linearization-Based Adaptive Control Paradigm for Multiple HVDC Links in AC/DC Power System. Energies 2017, 10, 819. [Google Scholar] [CrossRef]
- Chaouachi, A.; Kamel, R.M.; Nagasaka, K. A novel multi-model neuro-fuzzy-based MPPT for three-phase grid-connected photovoltaic system. Sol. Energy 2010, 84, 2219–2229. [Google Scholar] [CrossRef]
- Rezvani, A.; Gandomkar, M. Modeling and control of grid connected intelligent hybrid photovoltaic system using new hybrid fuzzy-neural method. Sol. Energy 2016, 127, 1–8. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L. Adaptive control paradigm for photovoltaic and solid oxide fuel cell in a grid-integrated hybrid renewable energy system. PLoS ONE 2017, 12, e0173966. [Google Scholar] [CrossRef]
- Sidra, M.; Khan, L.; Ahmed, S.; Bader, R. Indirect adaptive soft computing based wavelet-embedded control paradigms for WT/PV/SOFC in a grid/charging station connected hybrid power system. PLoS ONE 2017, 12, e0183750. [Google Scholar] [CrossRef]
- Hassan, S.Z.; Li, H.; Kamal, T.; Arifoglu, U.; Sidra, M.; Khan, K. Neuro-Fuzzy Wavelet Based Adaptive MPPT Algorithm for Photovoltaic Systems. Energies 2017, 10, 394. [Google Scholar] [CrossRef]
- Sidra, M.; Ali, S.; Ahmad, S.; Khan, L.; Hassan, S.Z.; Kamal, T. Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System. Energies 2017, 10, 1923. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Design and real-time implementation of a new auto-tuned adaptive MPPT control for a photovoltaic system. Int. J. Electr. Power 2015, 64, 792–803. [Google Scholar] [CrossRef]
- Ahmad, S.; Khan, L. A self-tuning NeuroFuzzy feedback linearization-based damping control strategy for multiple HVDC links. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 913–938. [Google Scholar] [CrossRef]
- Thomas, B.; De Blasio, R. IEEE 1547 series of standards: Interconnection issues. IEEE Trans. Power Electron. 2004, 19, 1159–1162. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
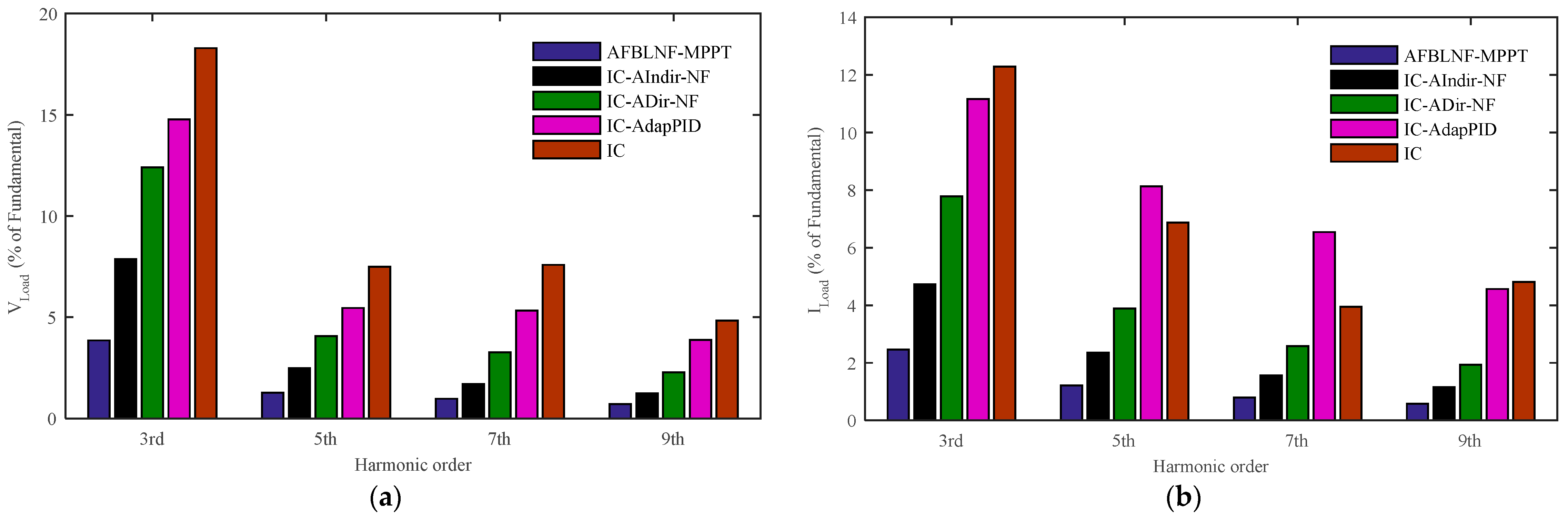
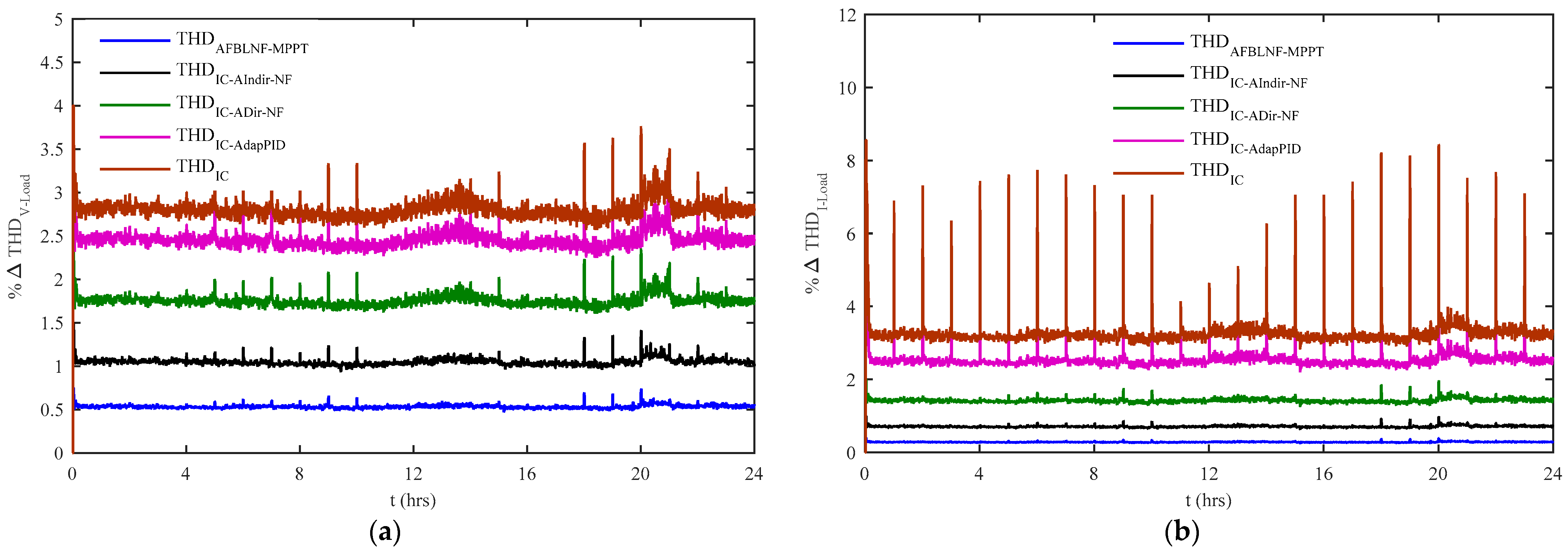
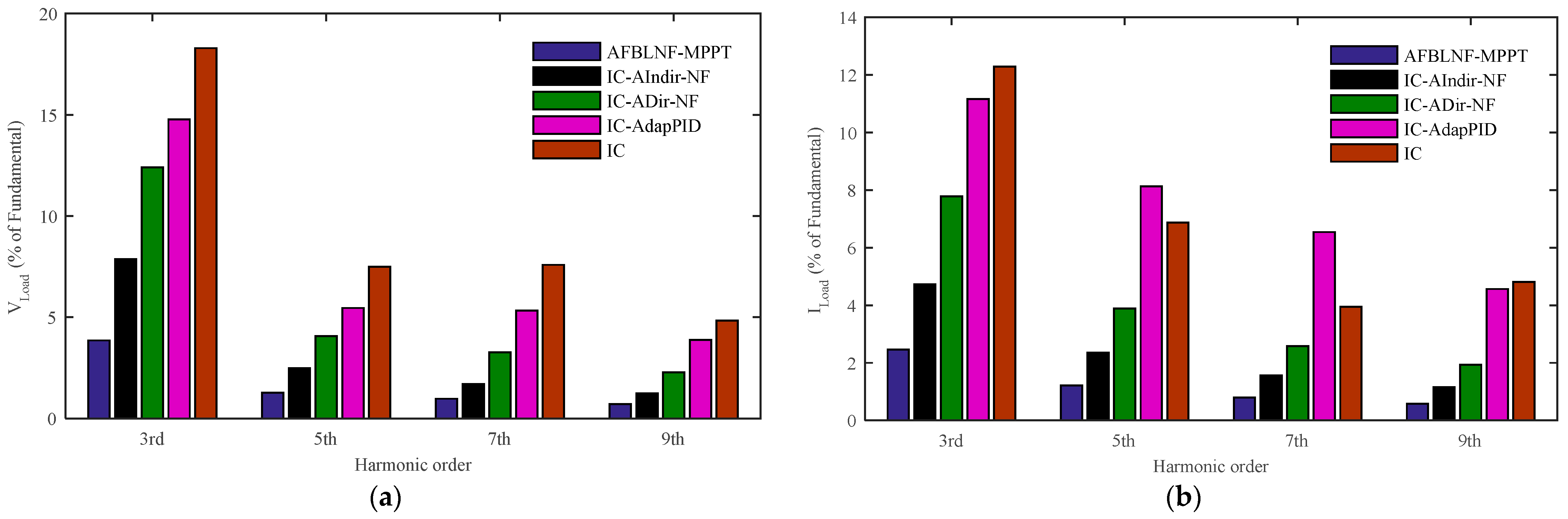
| % Age Improvement in Odd Harmonics Reduction with AFBLNF-MPPT as Compared to IC-AIndir-NF, IC-ADir-NF, IC-AdapPID and IC Control Schemes | ||||||||
|---|---|---|---|---|---|---|---|---|
| % Improvement | 3rd Harmonics | 5th Harmonics | 7th Harmonics | 9th Harmonics | ||||
| VLoad | ILoad | VLoad | ILoad | VLoad | ILoad | VLoad | ILoad | |
| (B-A)/B % | 51% | 48% | 49% | 49% | 42% | 49% | 42% | 50% |
| (C-A)/C % | 69% | 68% | 69% | 69% | 70% | 69% | 69% | 70% |
| (D-A)/D % | 74% | 78% | 77% | 85% | 82% | 88% | 82% | 87% |
| (E-A)/E % | 79% | 80% | 83% | 82% | 87% | 80% | 85% | 90% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mumtaz, S.; Ahmad, S.; Khan, L.; Ali, S.; Kamal, T.; Hassan, S.Z. Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System. Energies 2018, 11, 606. https://doi.org/10.3390/en11030606
Mumtaz S, Ahmad S, Khan L, Ali S, Kamal T, Hassan SZ. Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System. Energies. 2018; 11(3):606. https://doi.org/10.3390/en11030606
Chicago/Turabian StyleMumtaz, Sidra, Saghir Ahmad, Laiq Khan, Saima Ali, Tariq Kamal, and Syed Zulqadar Hassan. 2018. "Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System" Energies 11, no. 3: 606. https://doi.org/10.3390/en11030606
APA StyleMumtaz, S., Ahmad, S., Khan, L., Ali, S., Kamal, T., & Hassan, S. Z. (2018). Adaptive Feedback Linearization Based NeuroFuzzy Maximum Power Point Tracking for a Photovoltaic System. Energies, 11(3), 606. https://doi.org/10.3390/en11030606