Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers


Abstract
:1. Introduction
- Enhancement of frequency and tie-line power variations in load changes. As is obvious, the multi-area power systems experience many load disturbances during daily operation.
- Alleviating frequency fluctuations and the tie-line power deviations between control areas due to the intermittent performance of wind turbines.
- Diminishing the generation rate of conventional generators in disturbances.
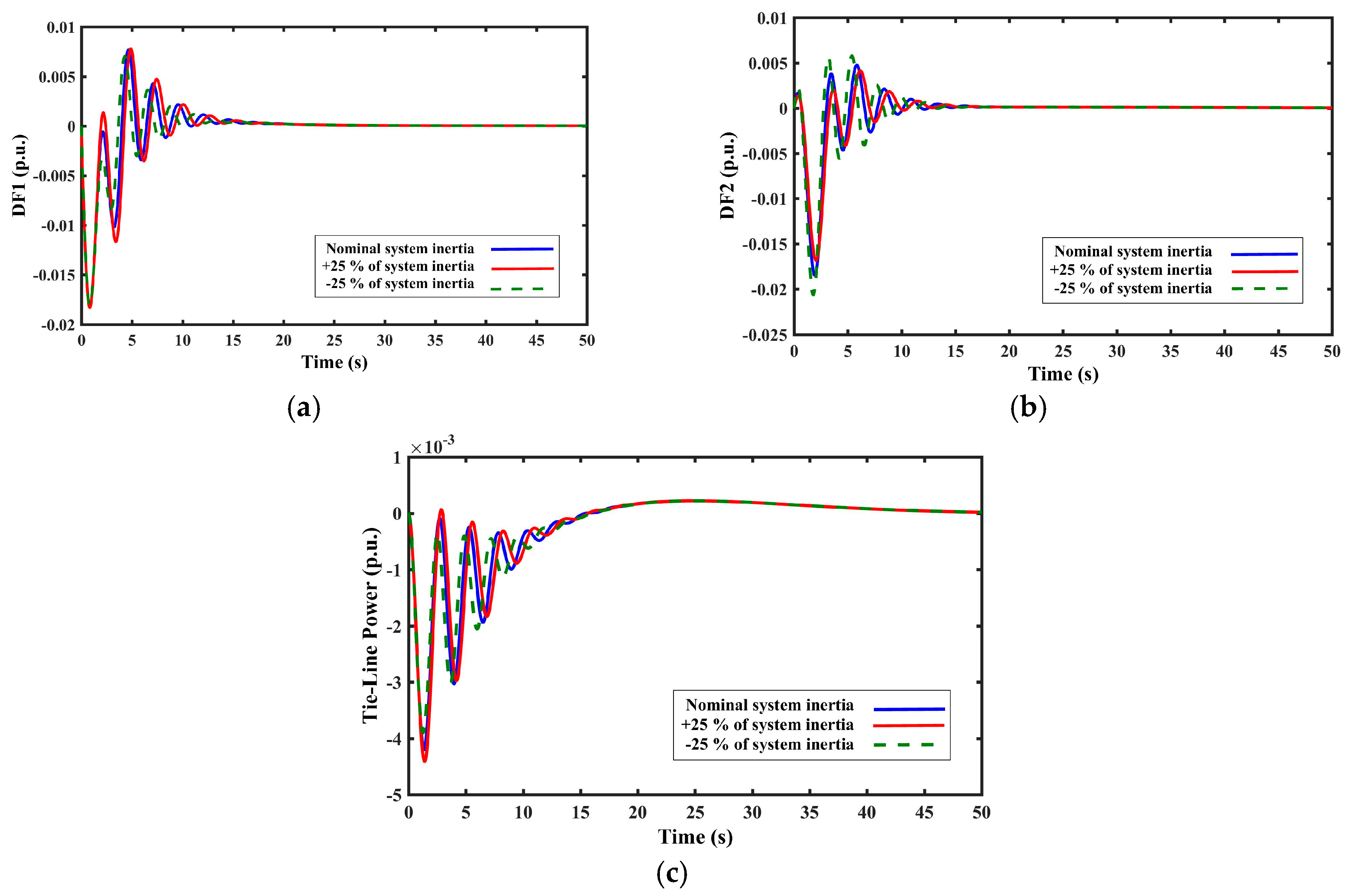
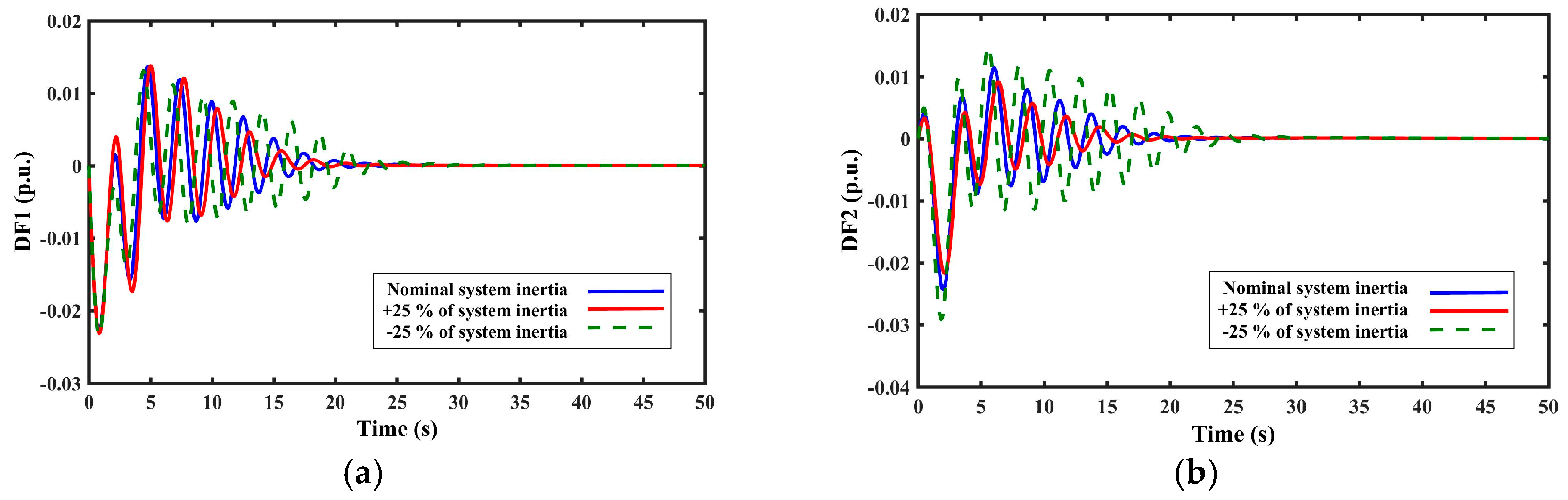
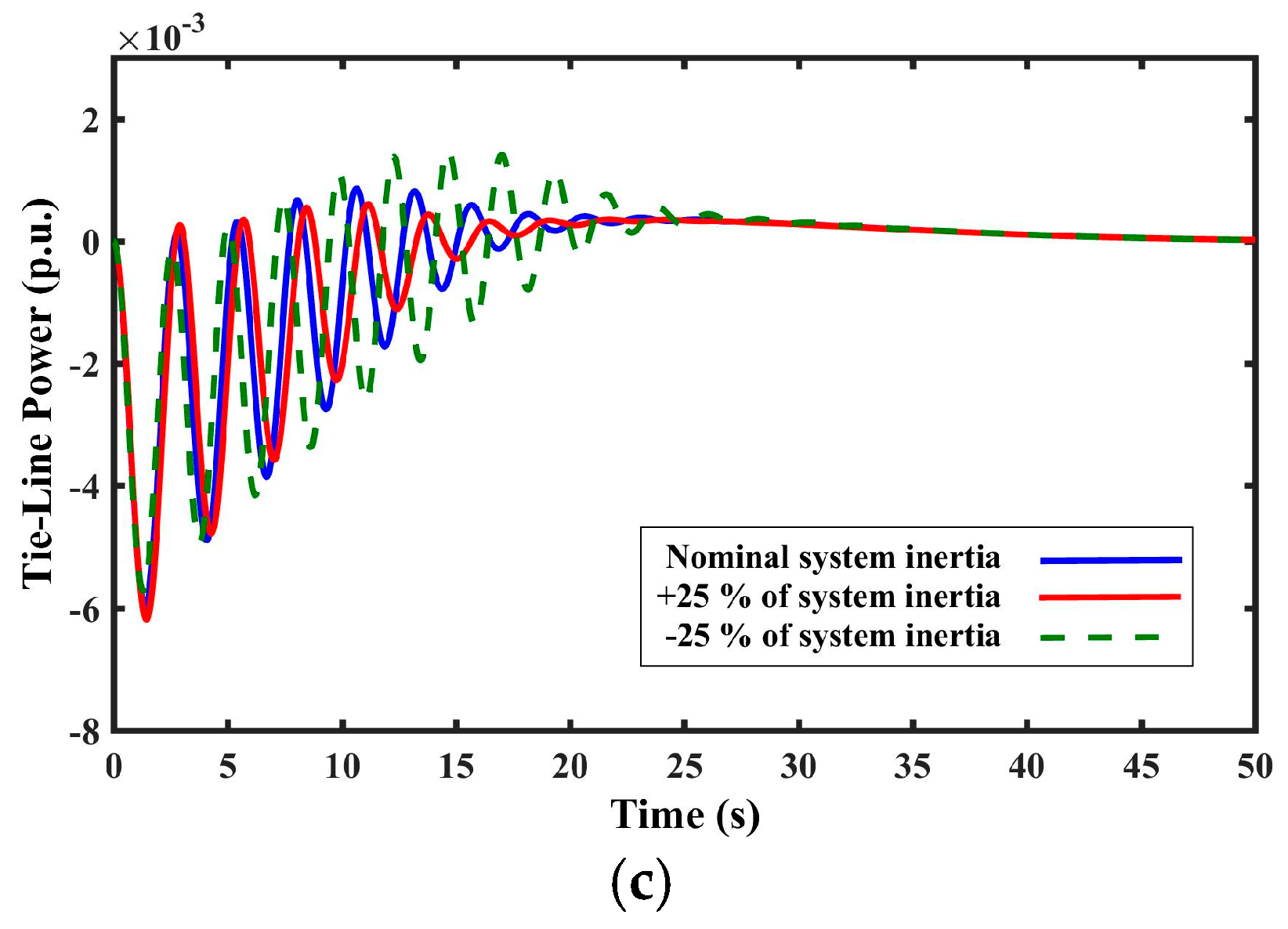
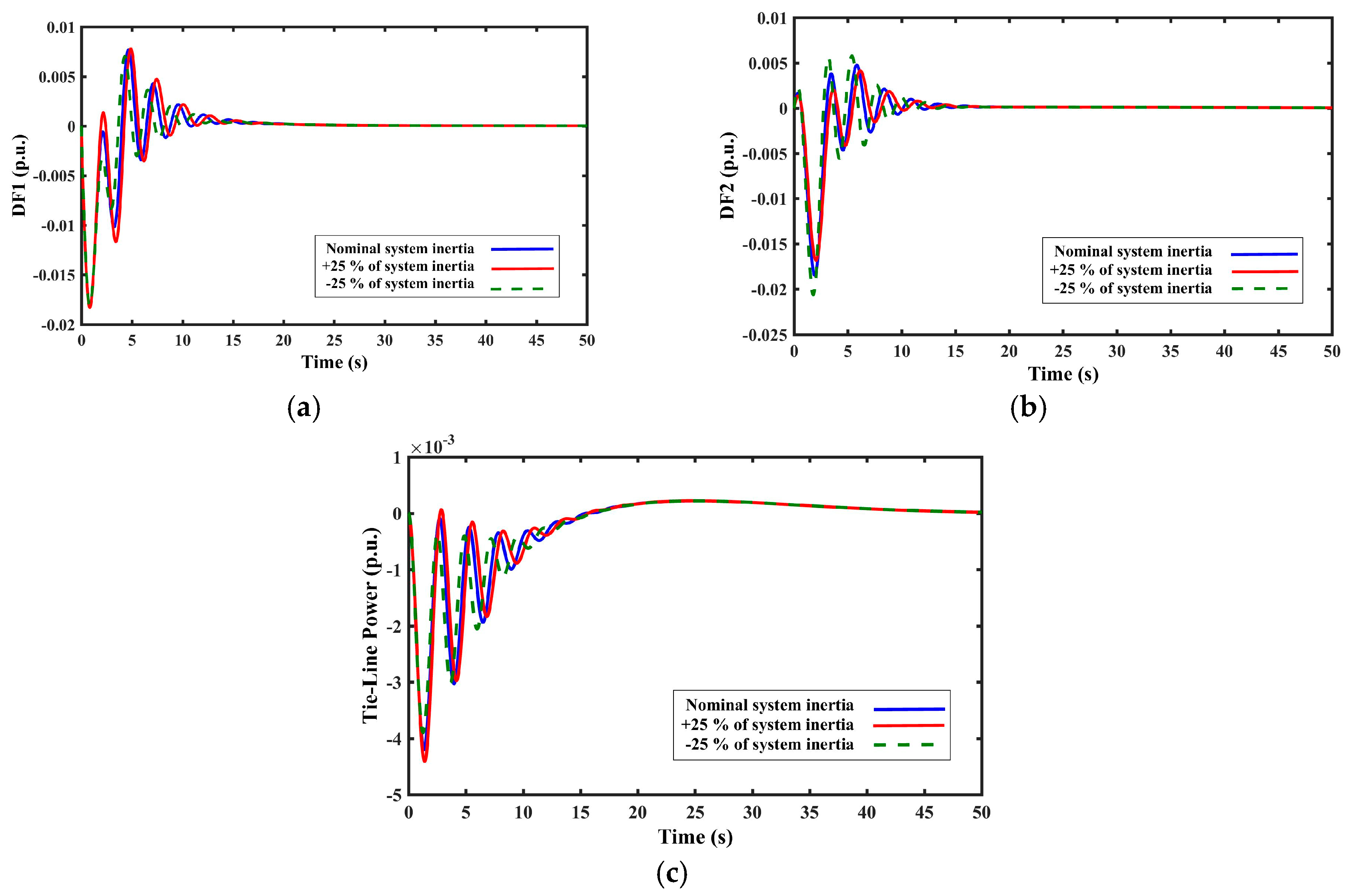
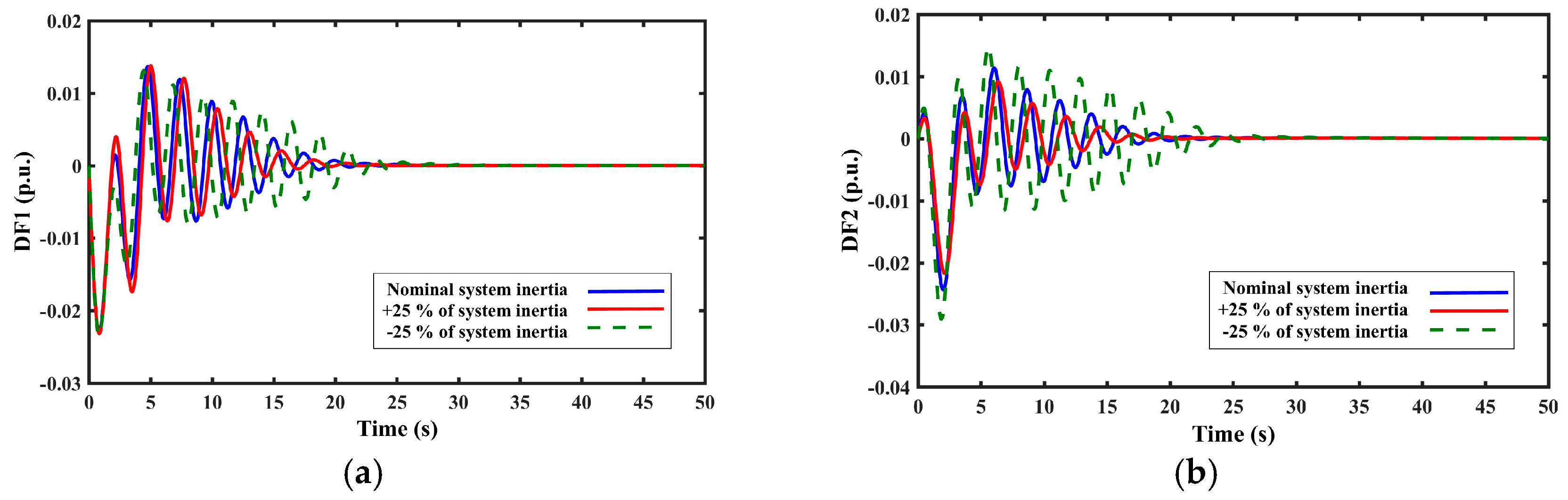
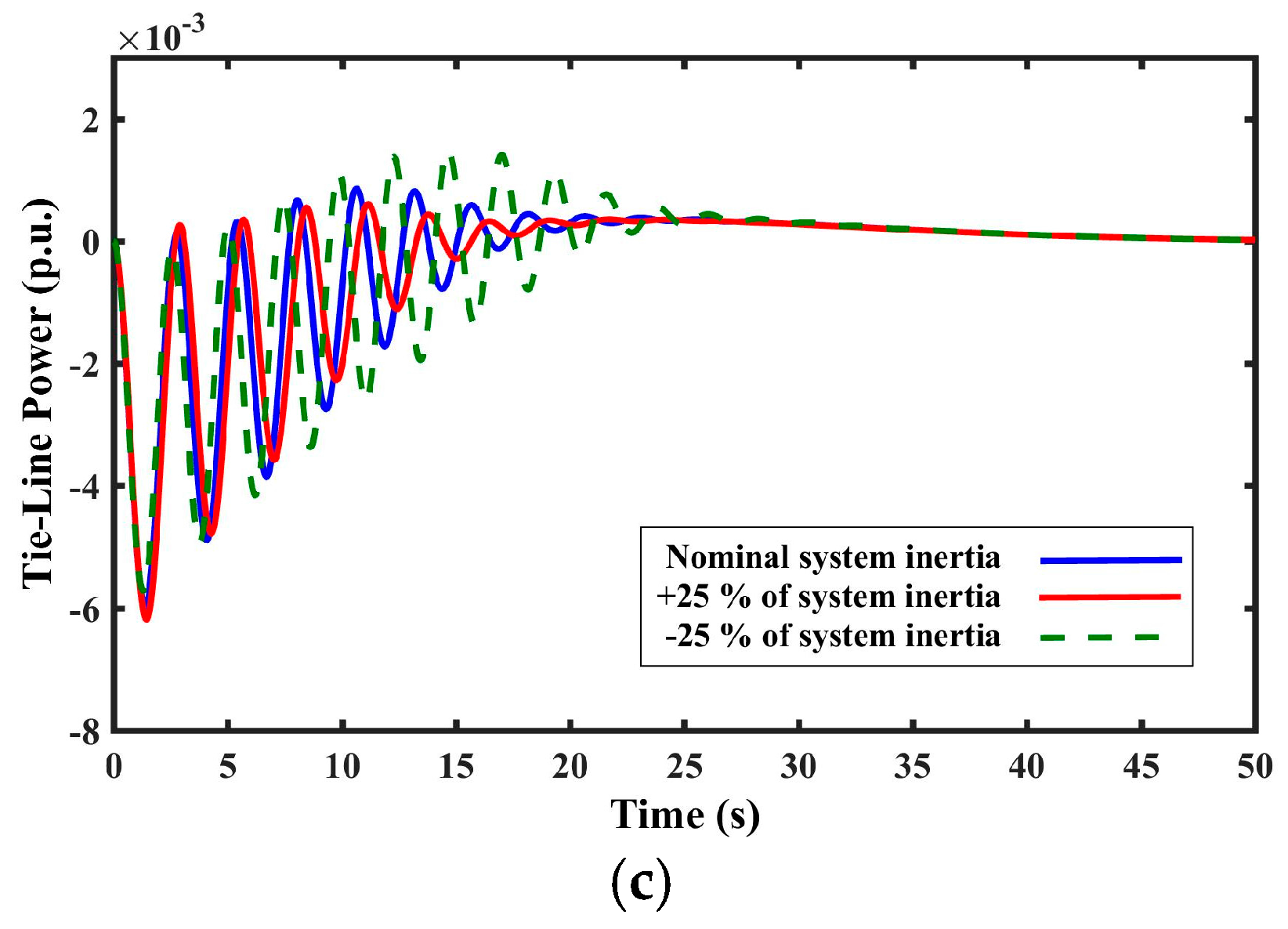
- Reliable performance for sensitivity analysis of the inertia parameter.
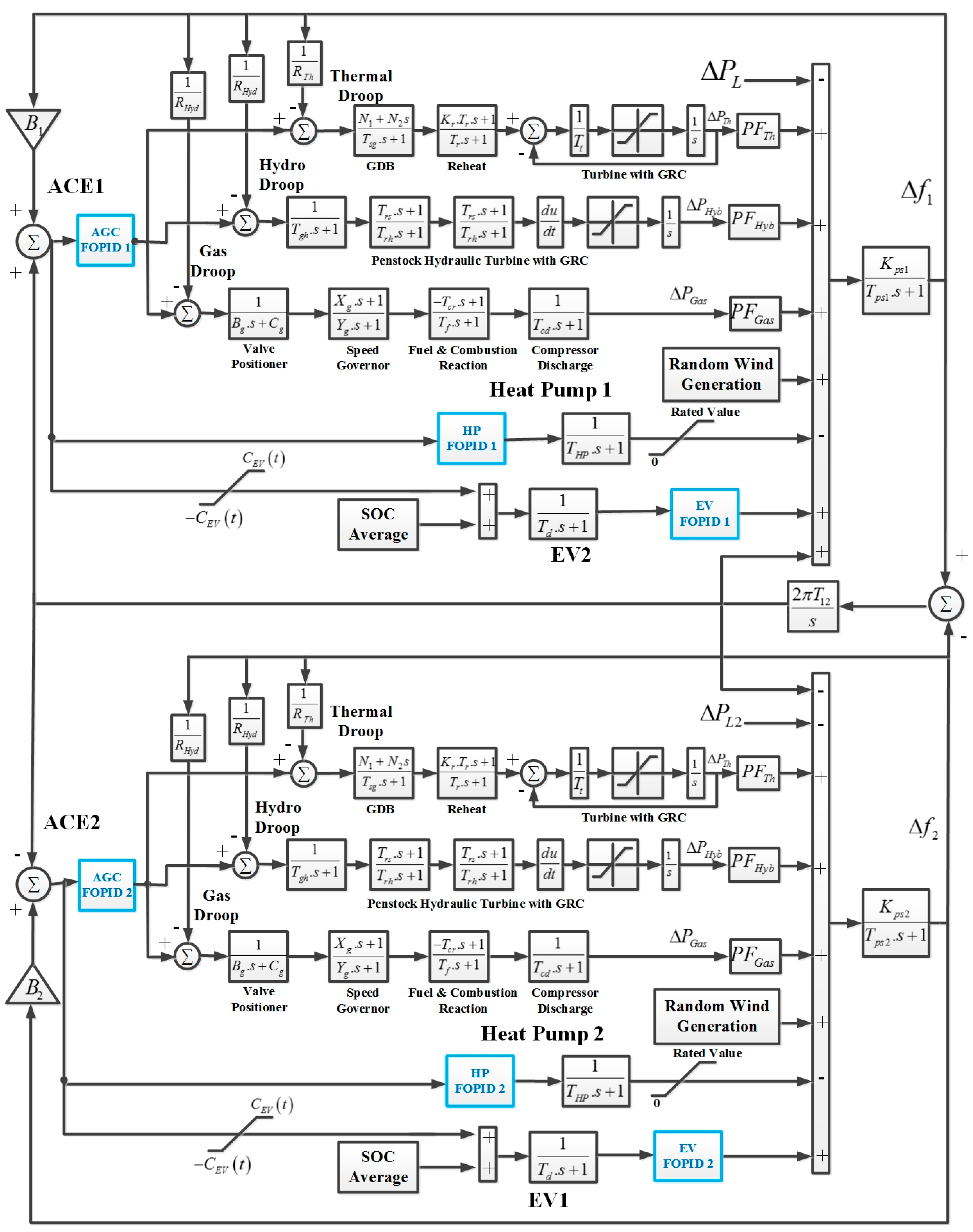
2. System Modelling
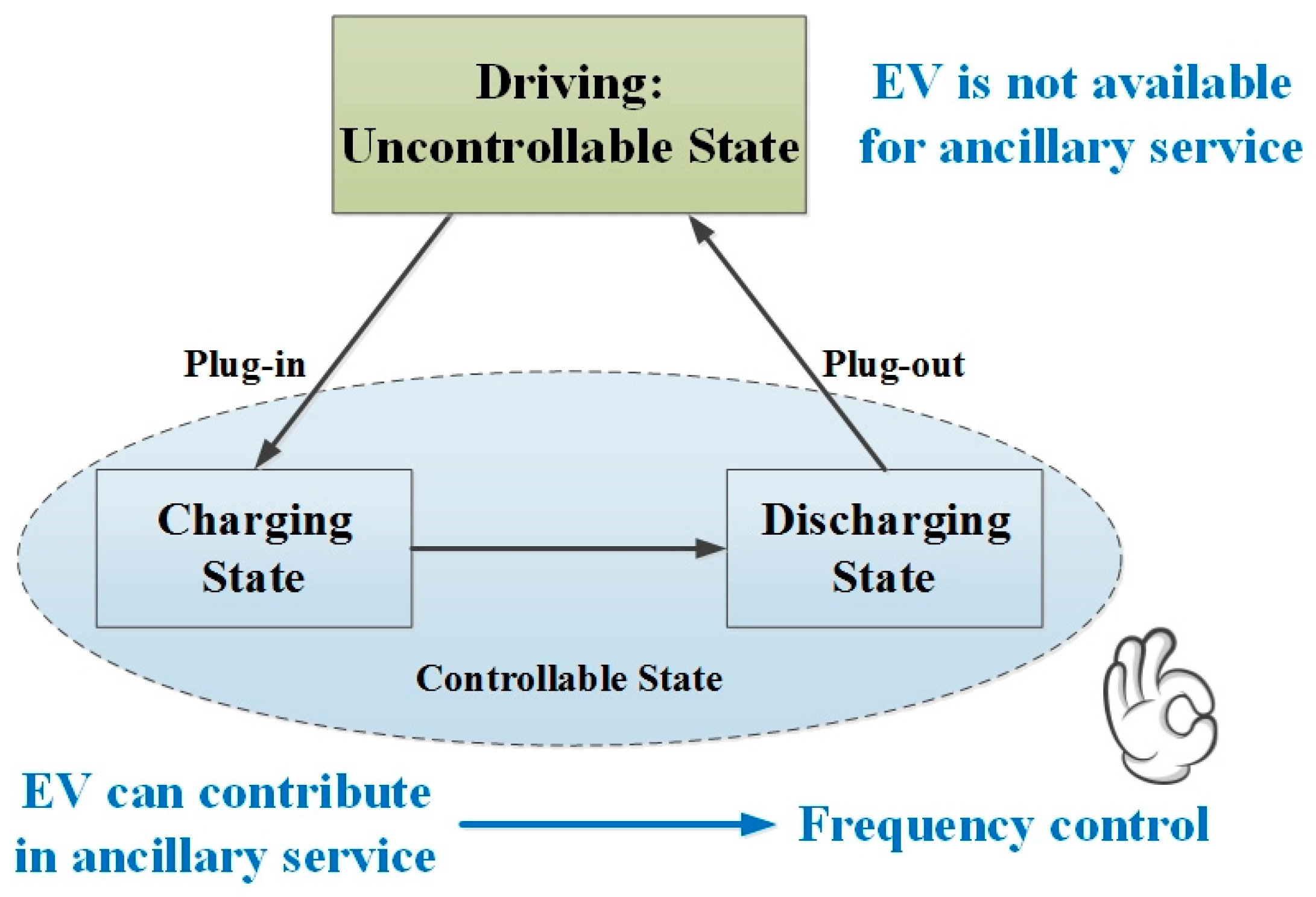
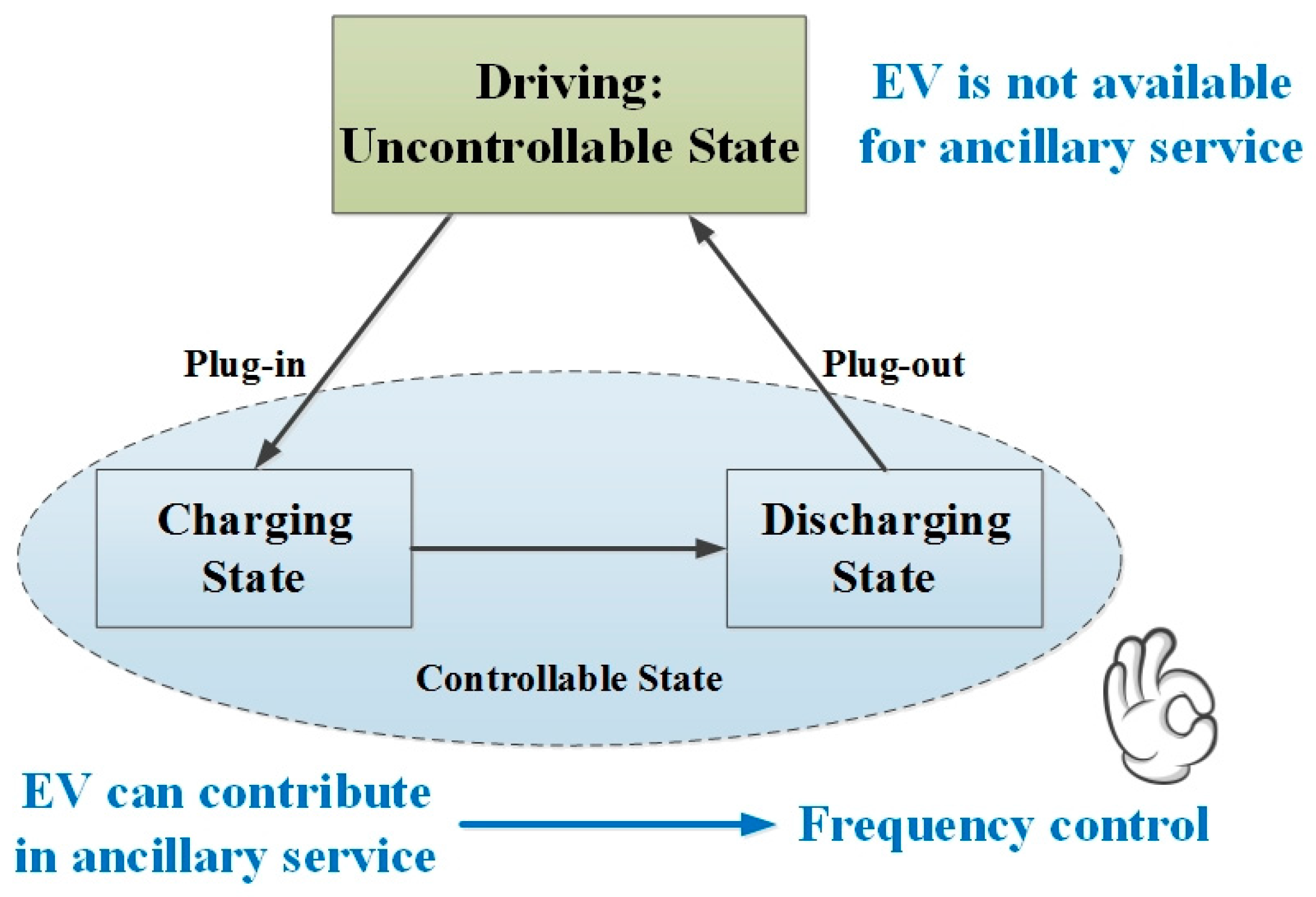
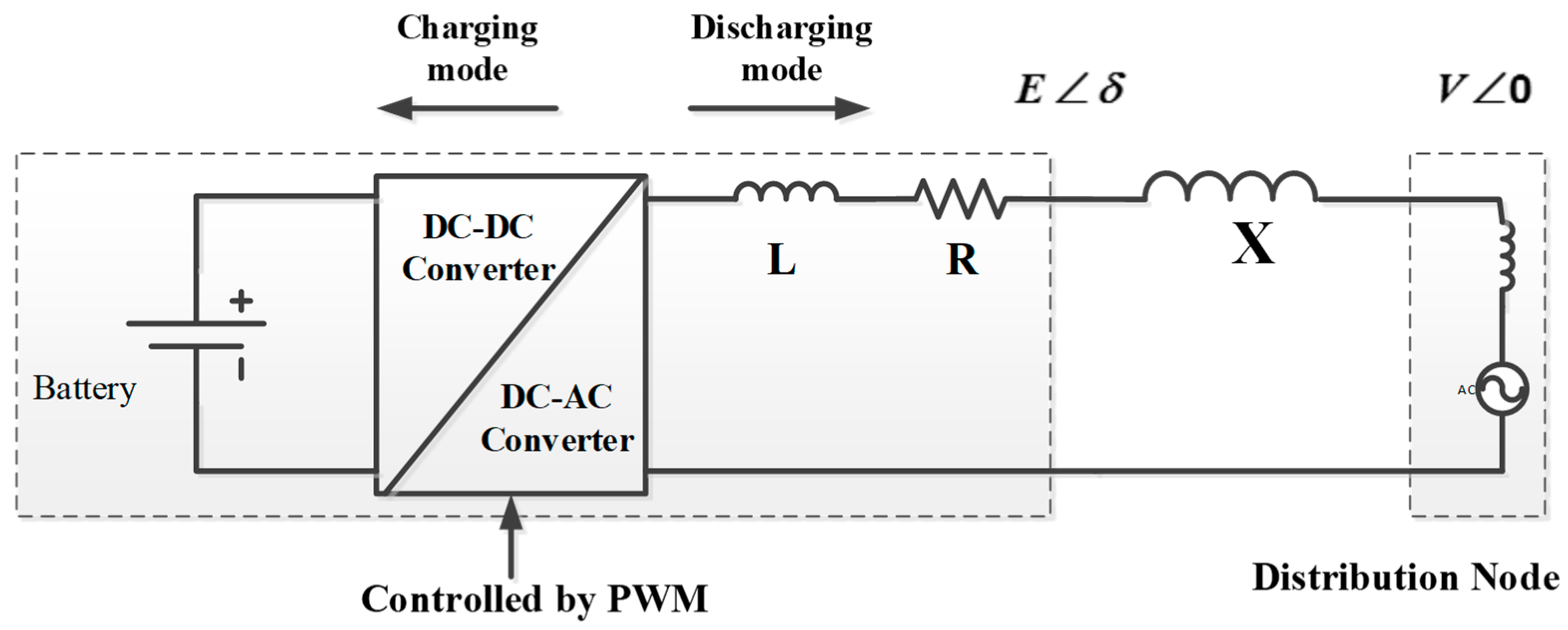
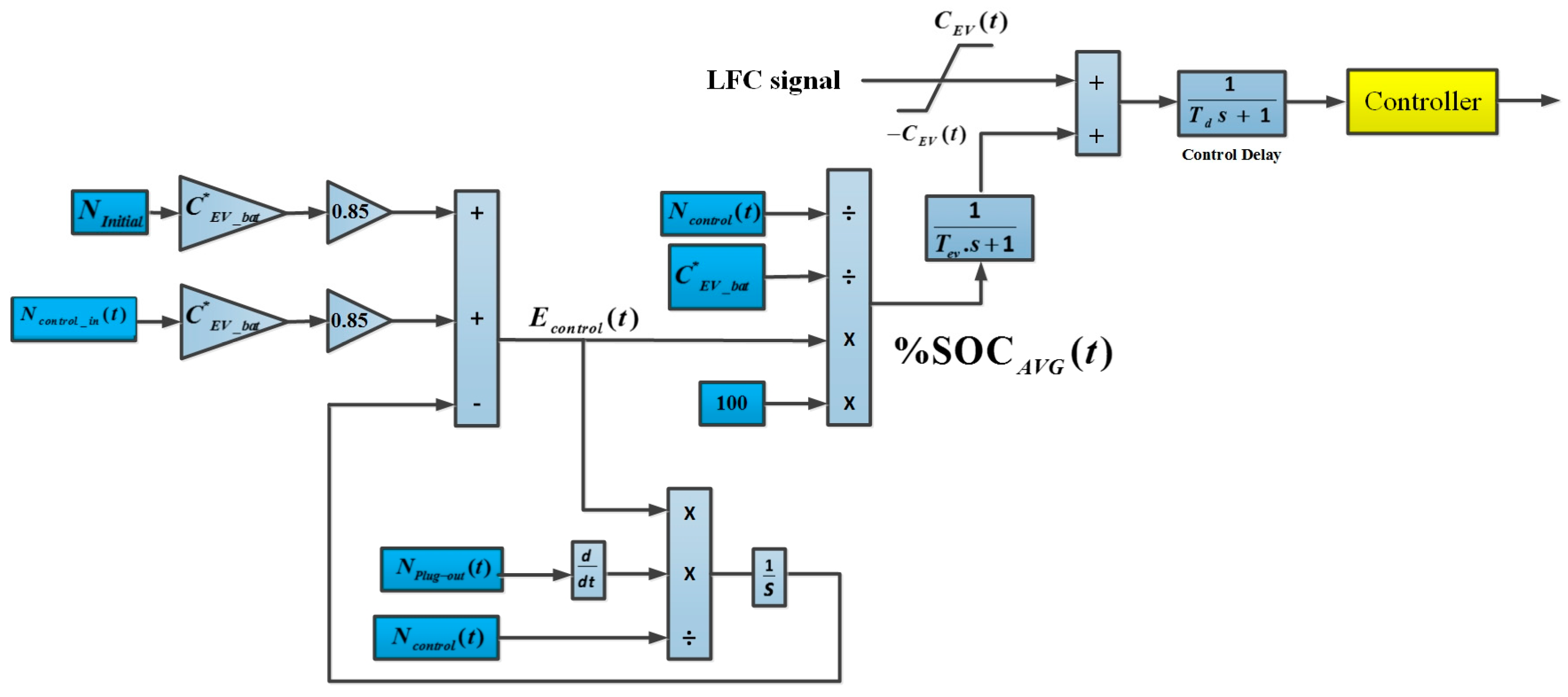
2.1. Modelling of EVs
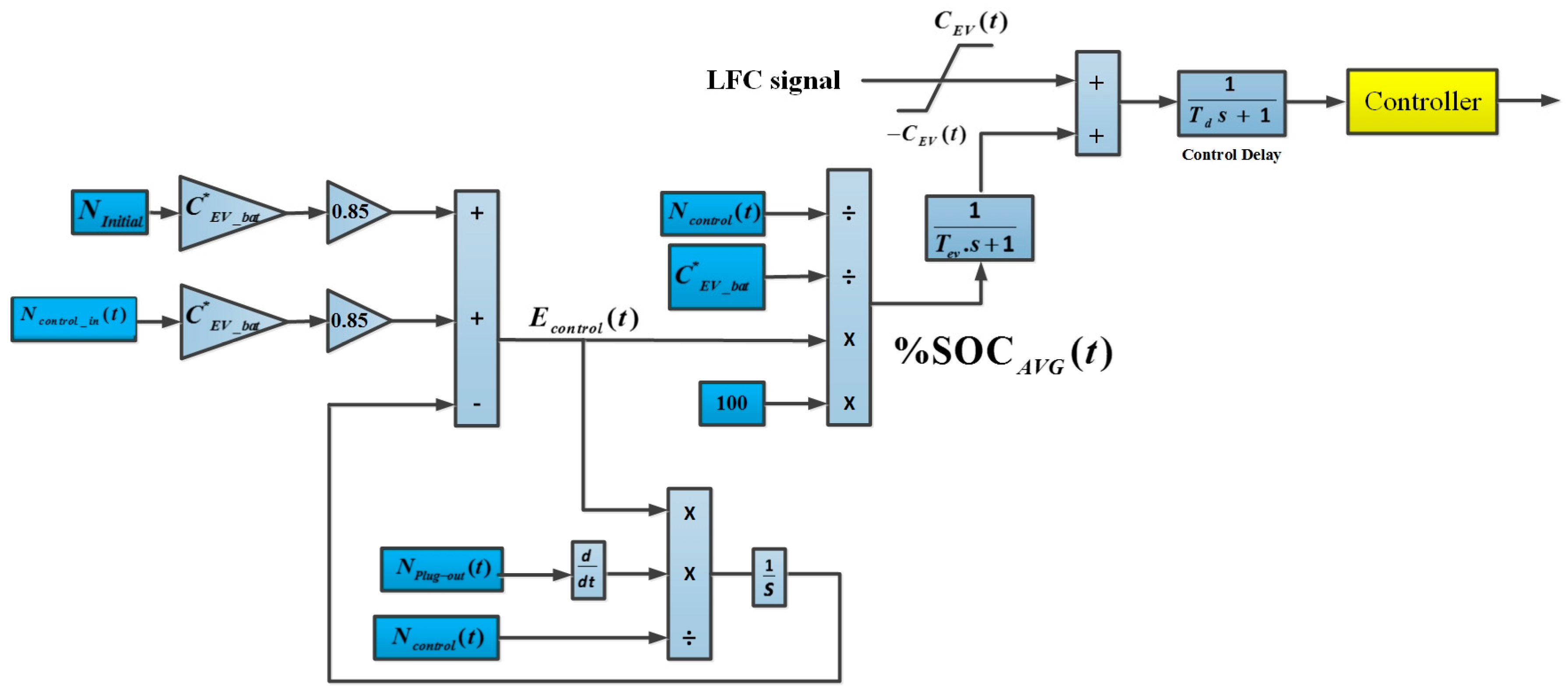
2.1.1. SOC Concept of an EV
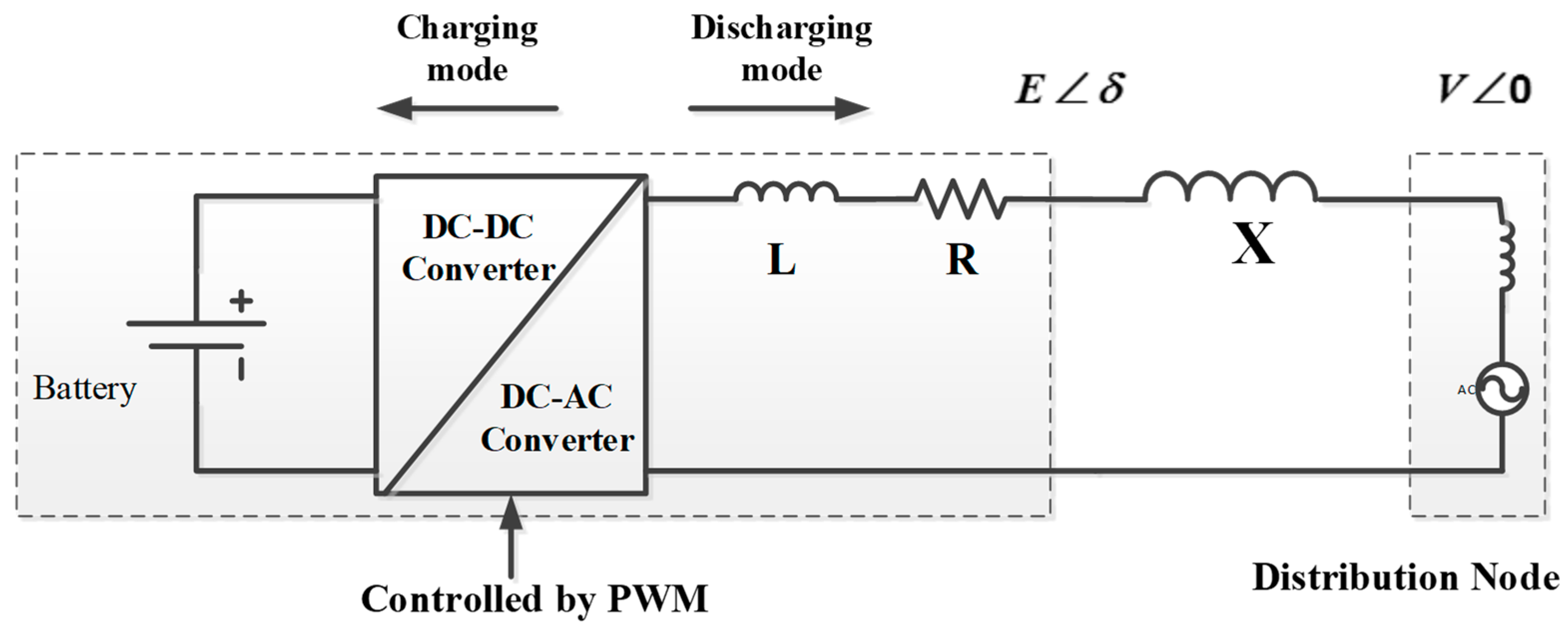
2.1.2. Lumped Model of EVs
- The minimum range, which is 80%, is defined to consider the satisfaction of the EV users. The users wish to use their EVs at a high SOC level for the next trip.
- The maximum range, which is 90%, is defined to consider the lifetime of the battery. It is well known that the charging and discharging states of batteries near 100% SOC can result in deteriorated efficiency and decreased lifetime.
2.2. Modelling of HPs
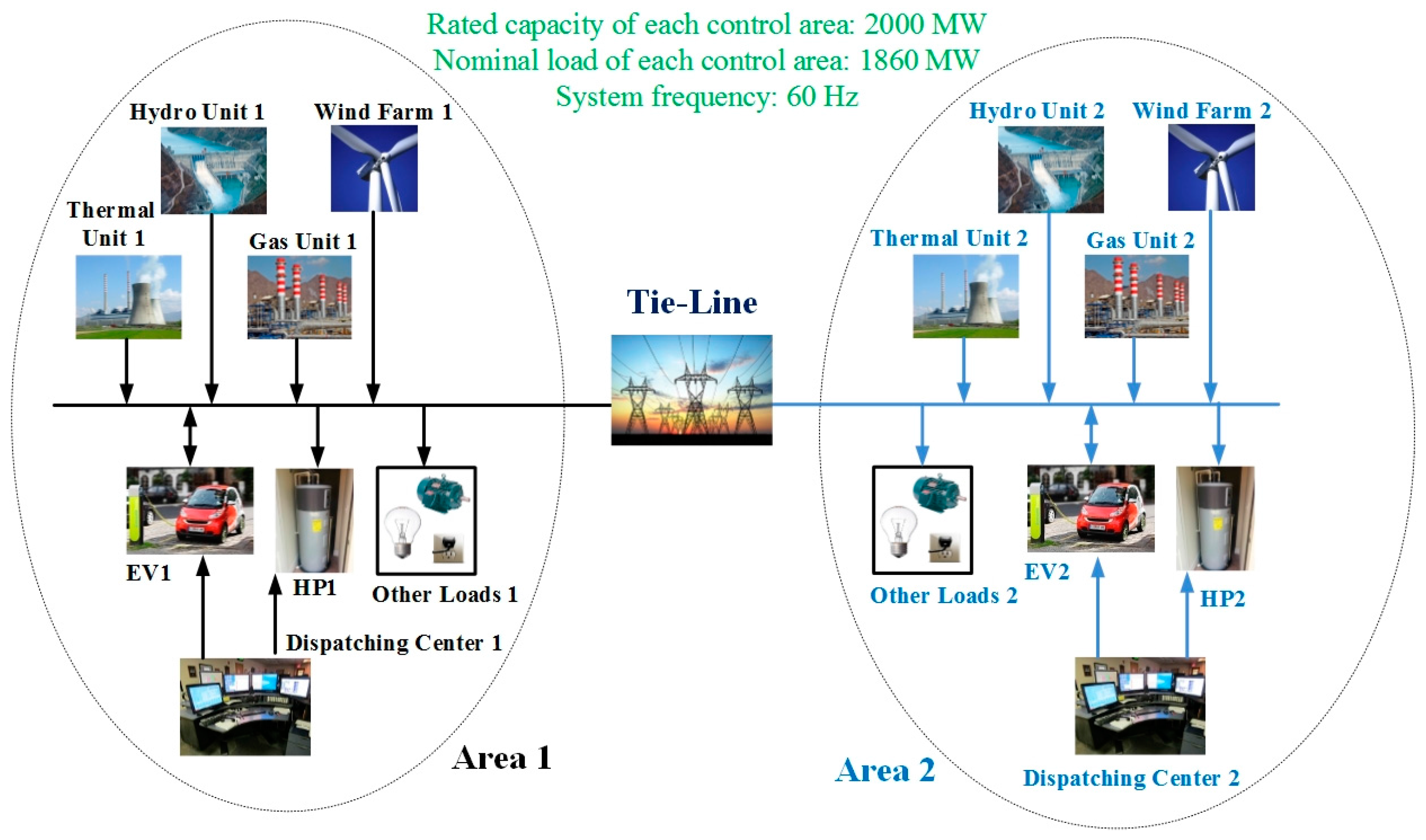
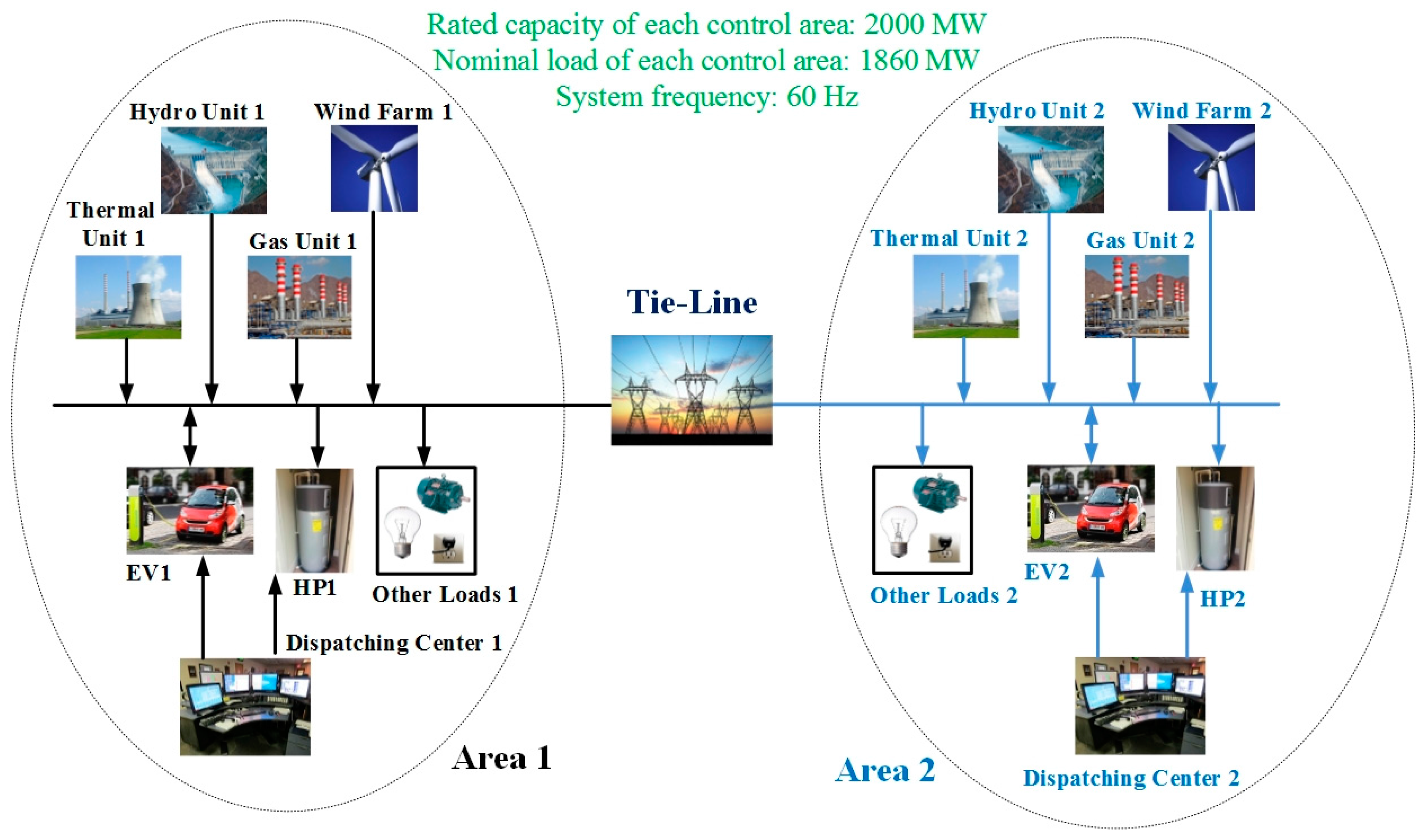
2.3. Power System under Study
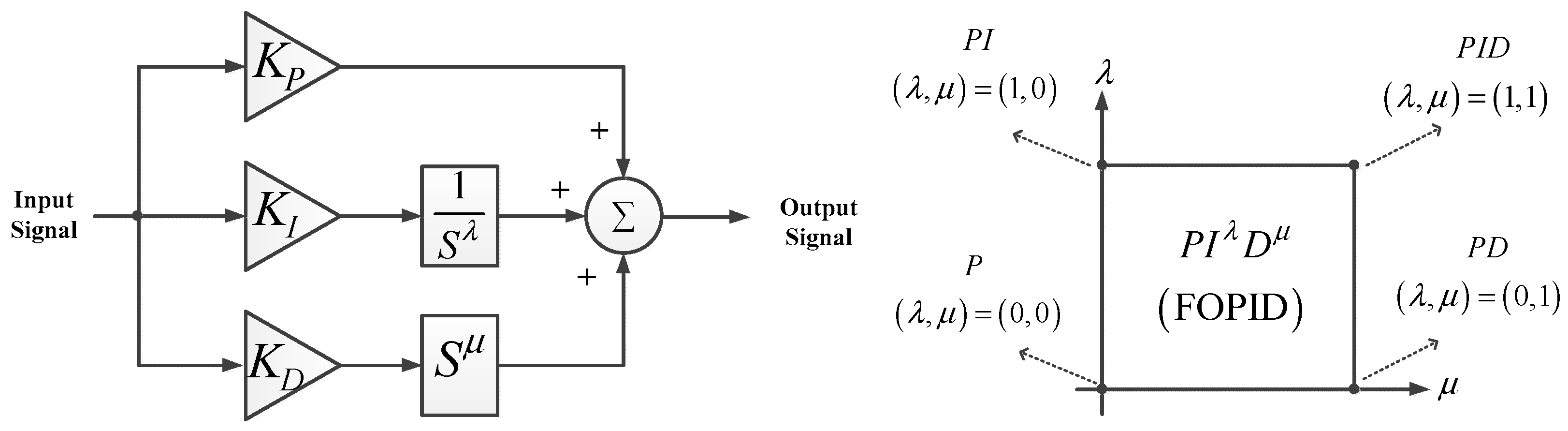
3. Design Procedure of the FOPID Controller
3.1. A Brief Glossary on Fractional Order Calculus
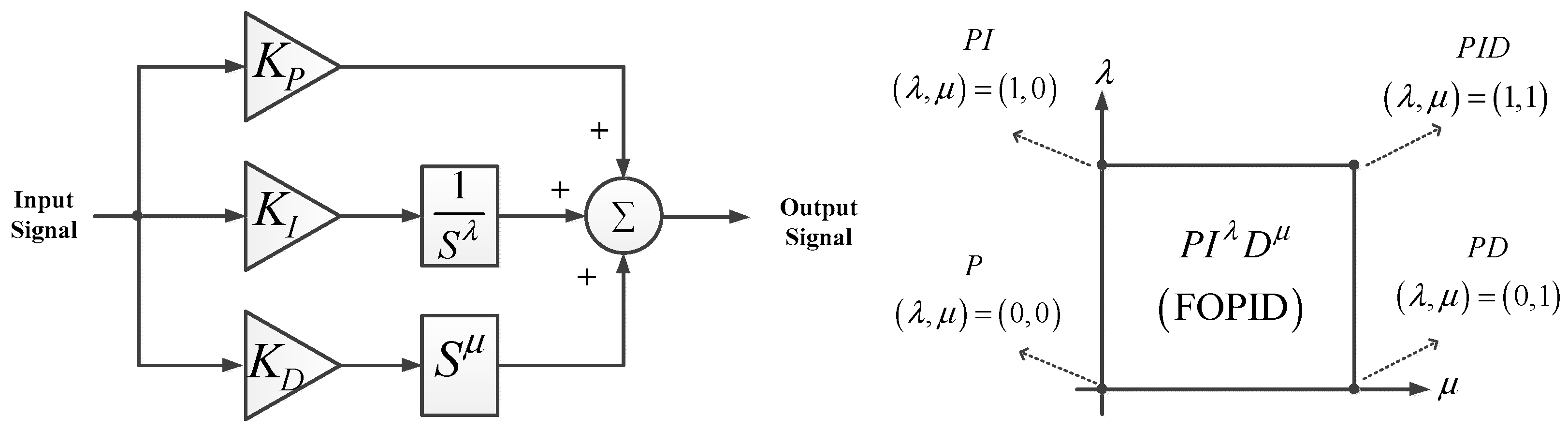
3.2. Fractional Order PID Controller
3.3. Problem Formulation for the Optimization Process
3.4. Sine Cosine Algorithm
4. Numerical Studies and Discussion
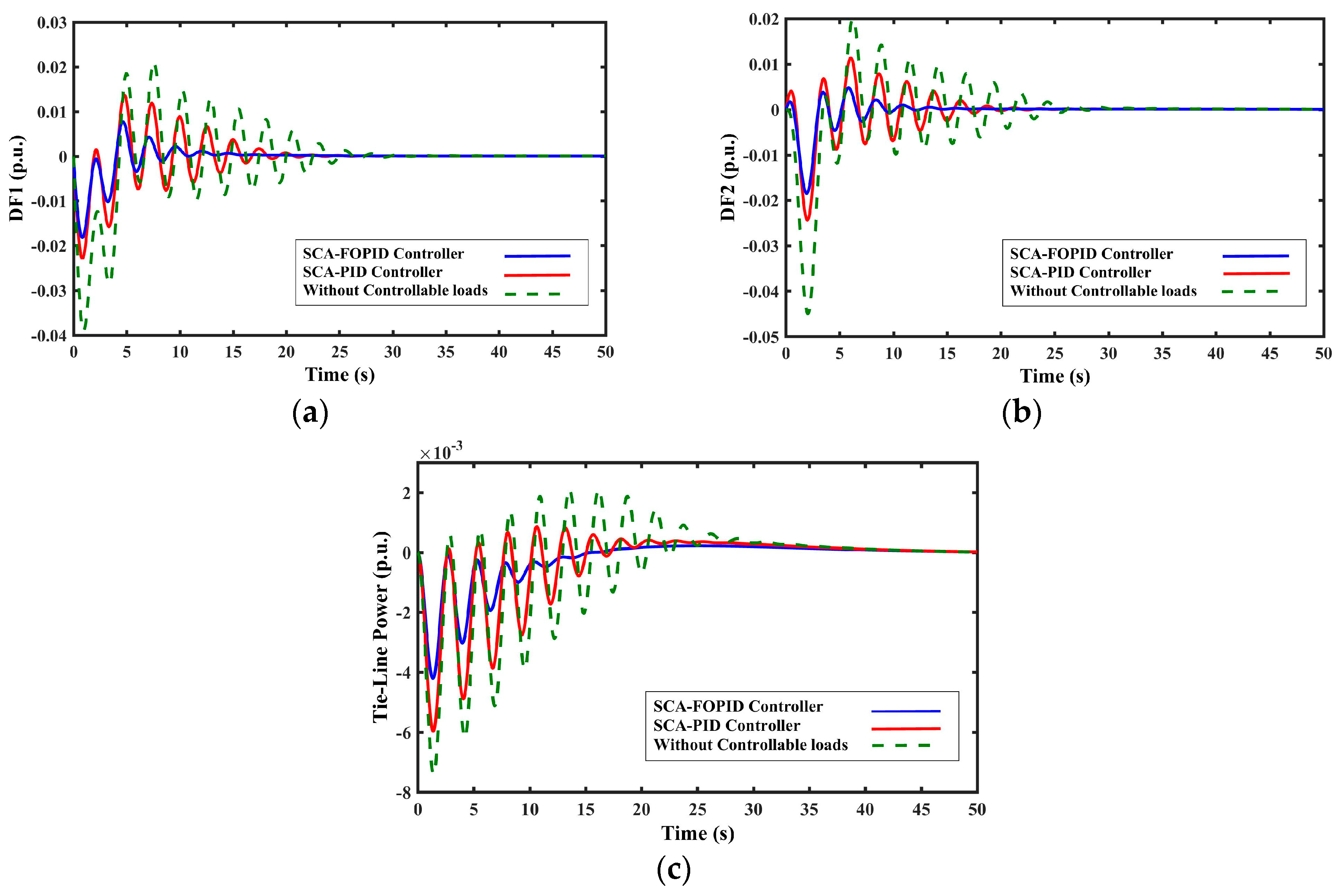
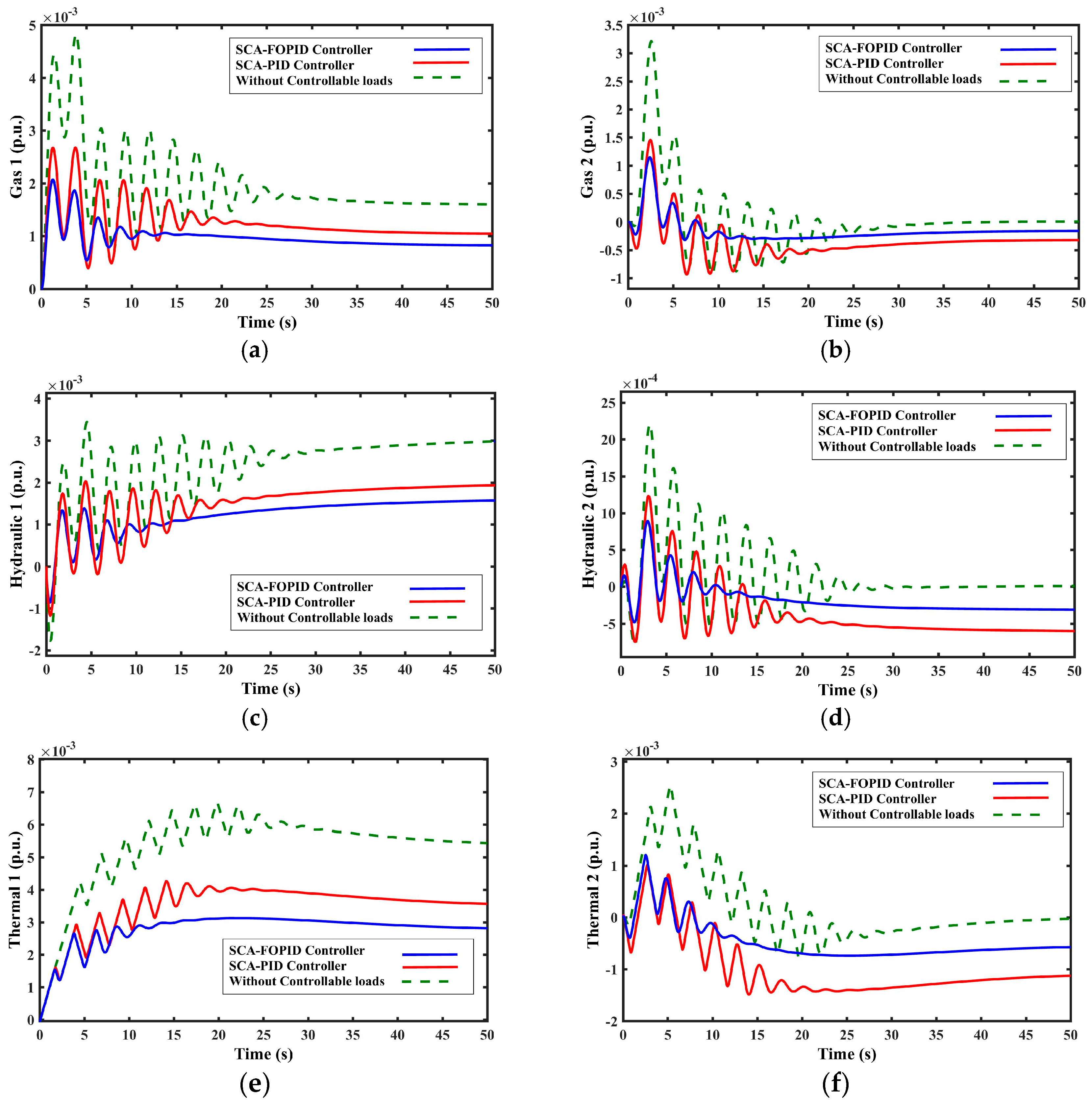
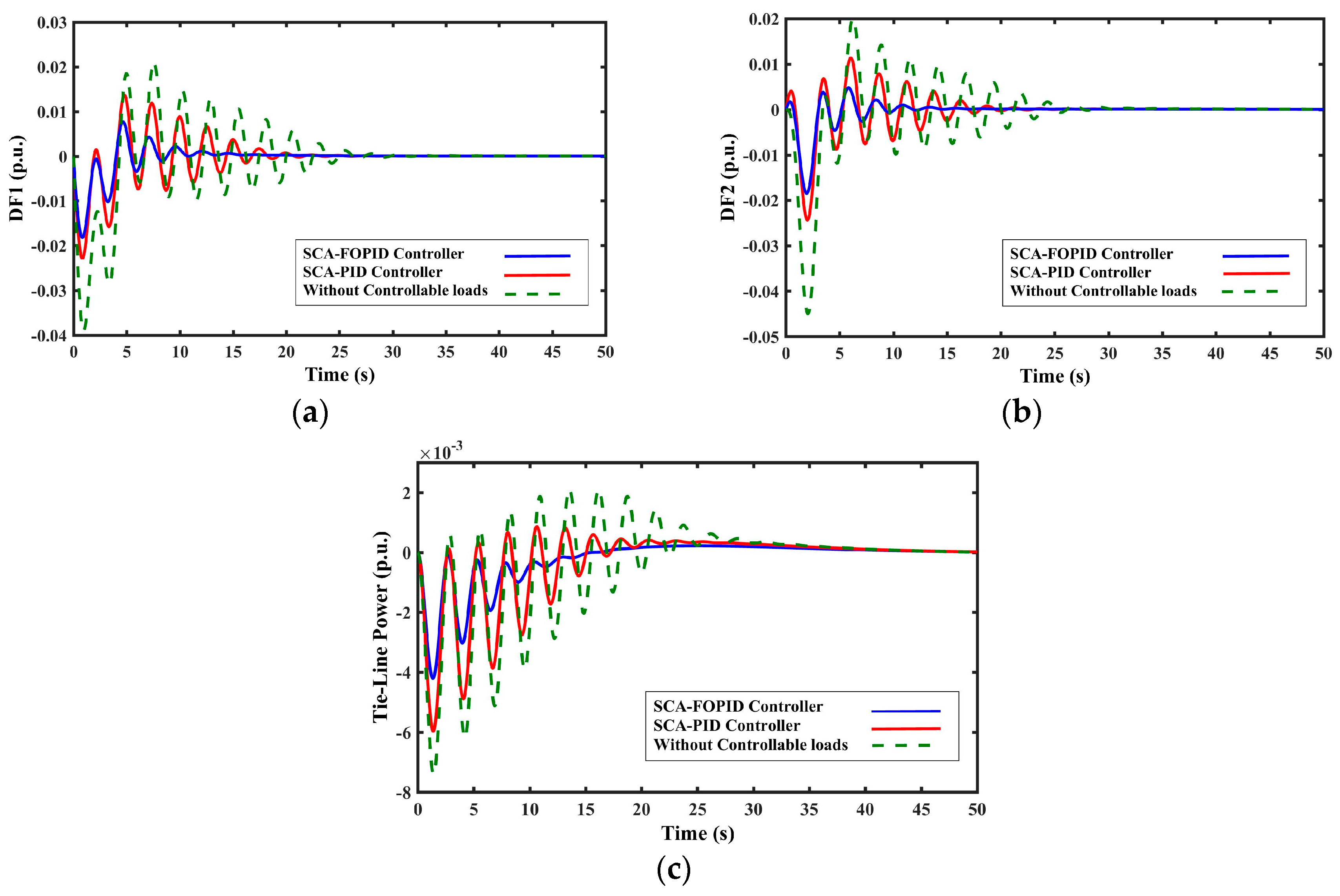
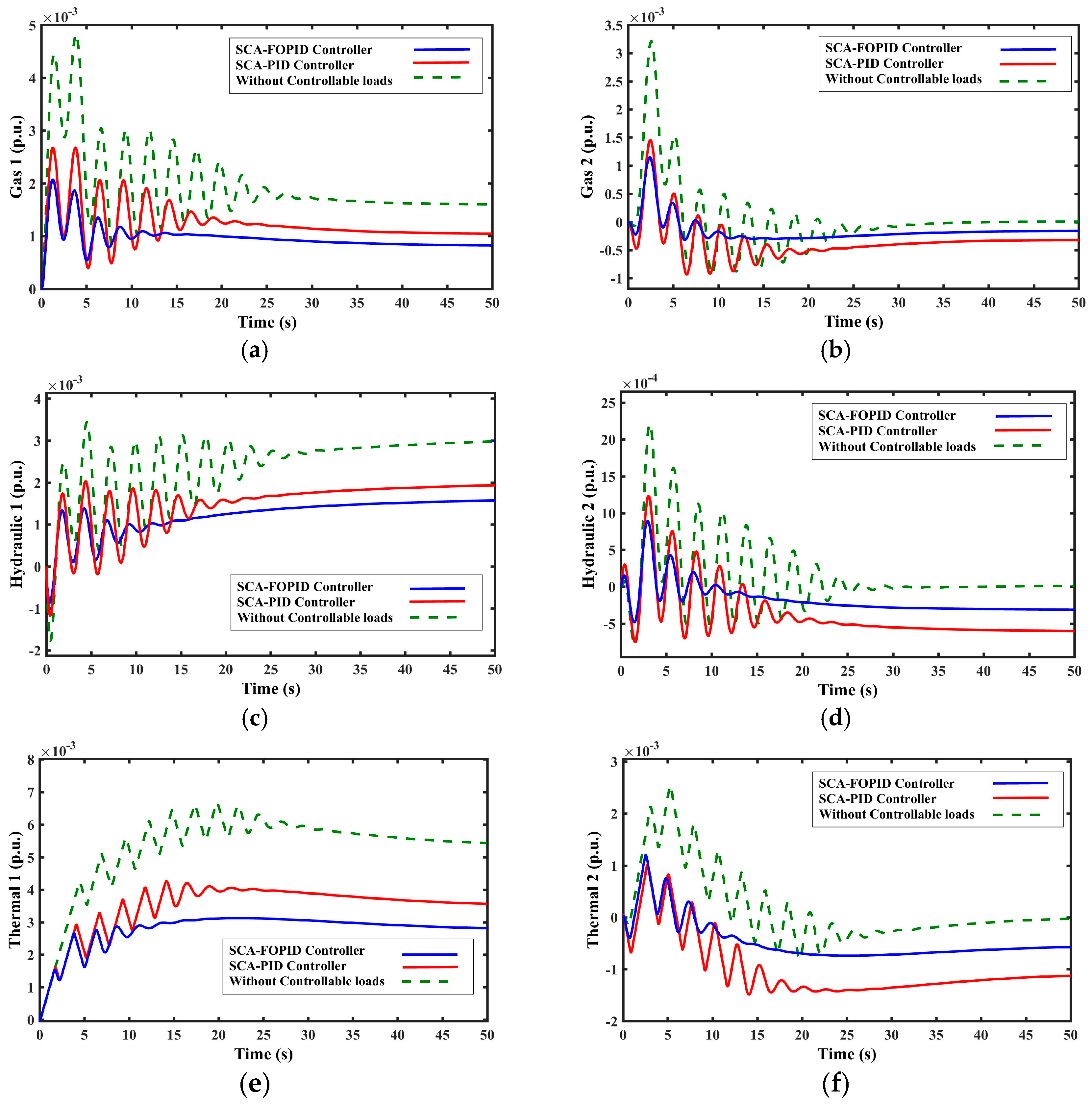
4.1. First Scenario: Step Load Change
- Decreasing the peak value of frequency and tie-line power deviations;
- Fast damping of oscillations in tie-line power deviations;
- Reduction of the generation rate in generation units;
- Better performance indices compared to the PID controller.
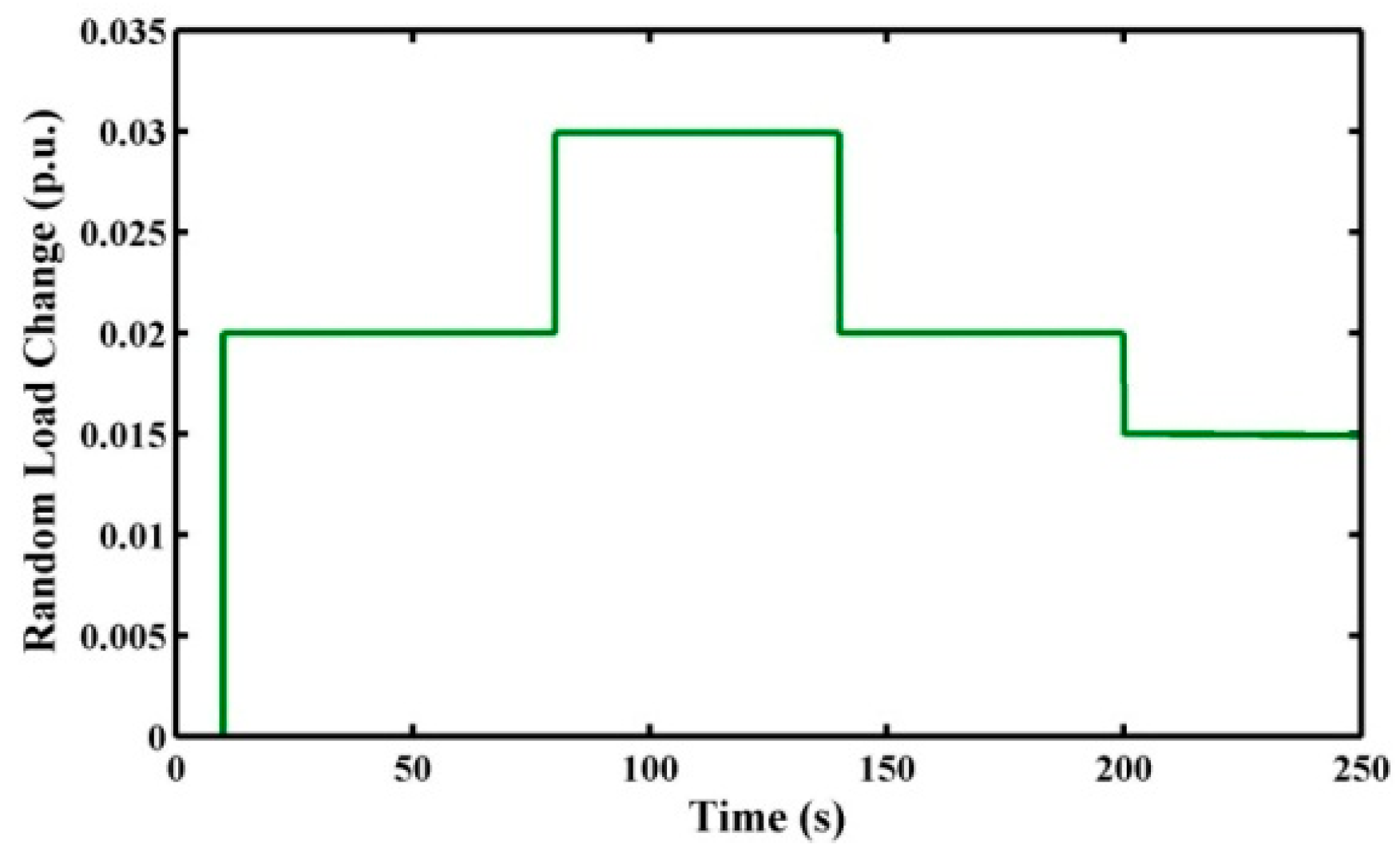
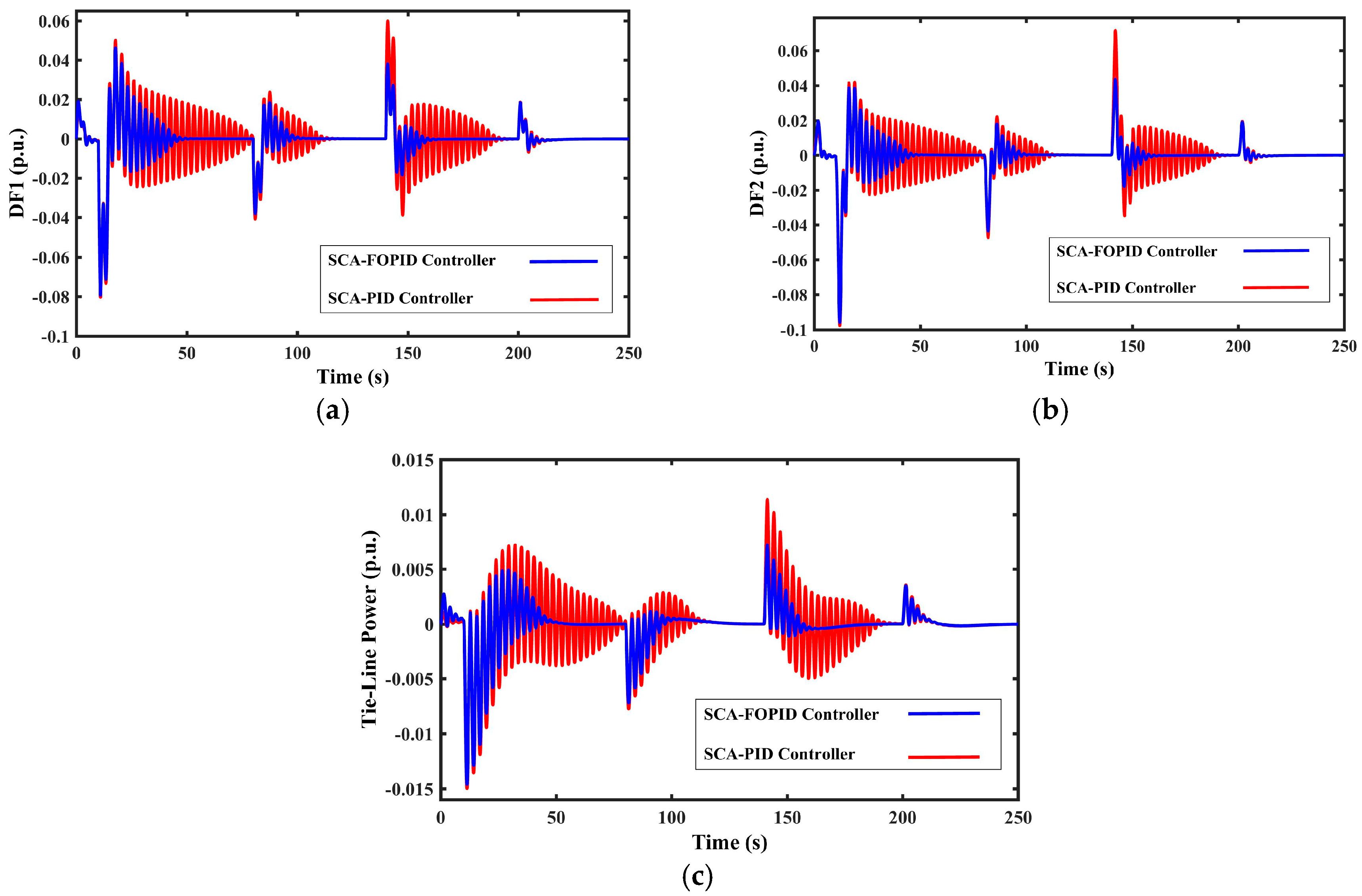
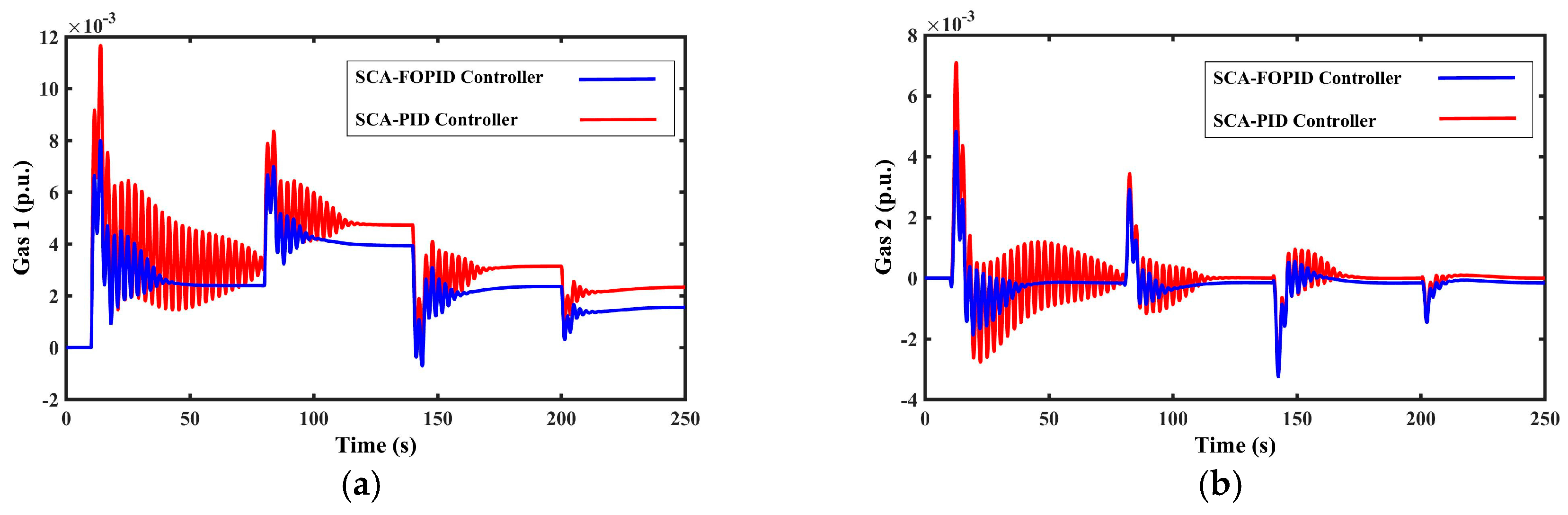
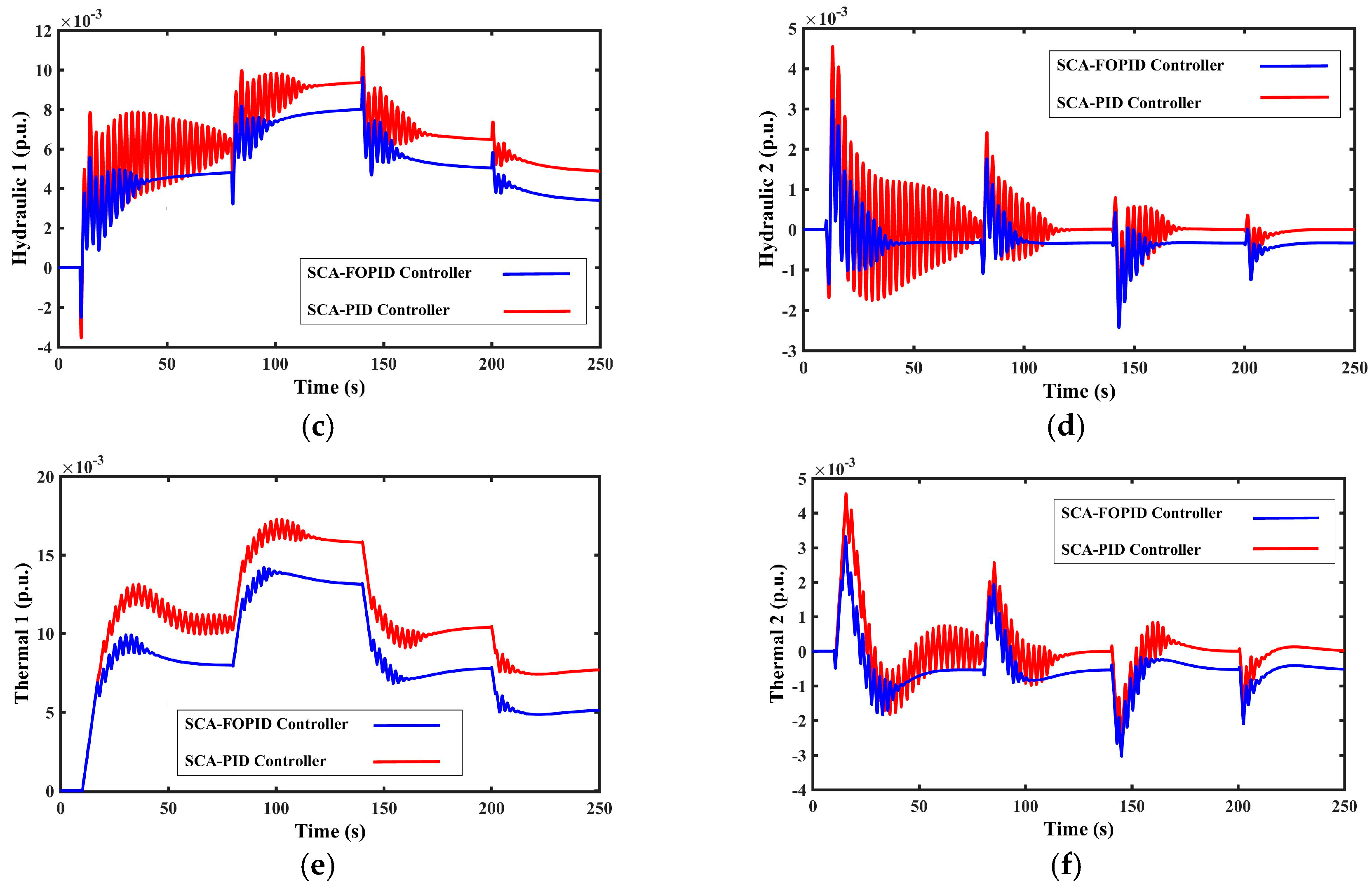
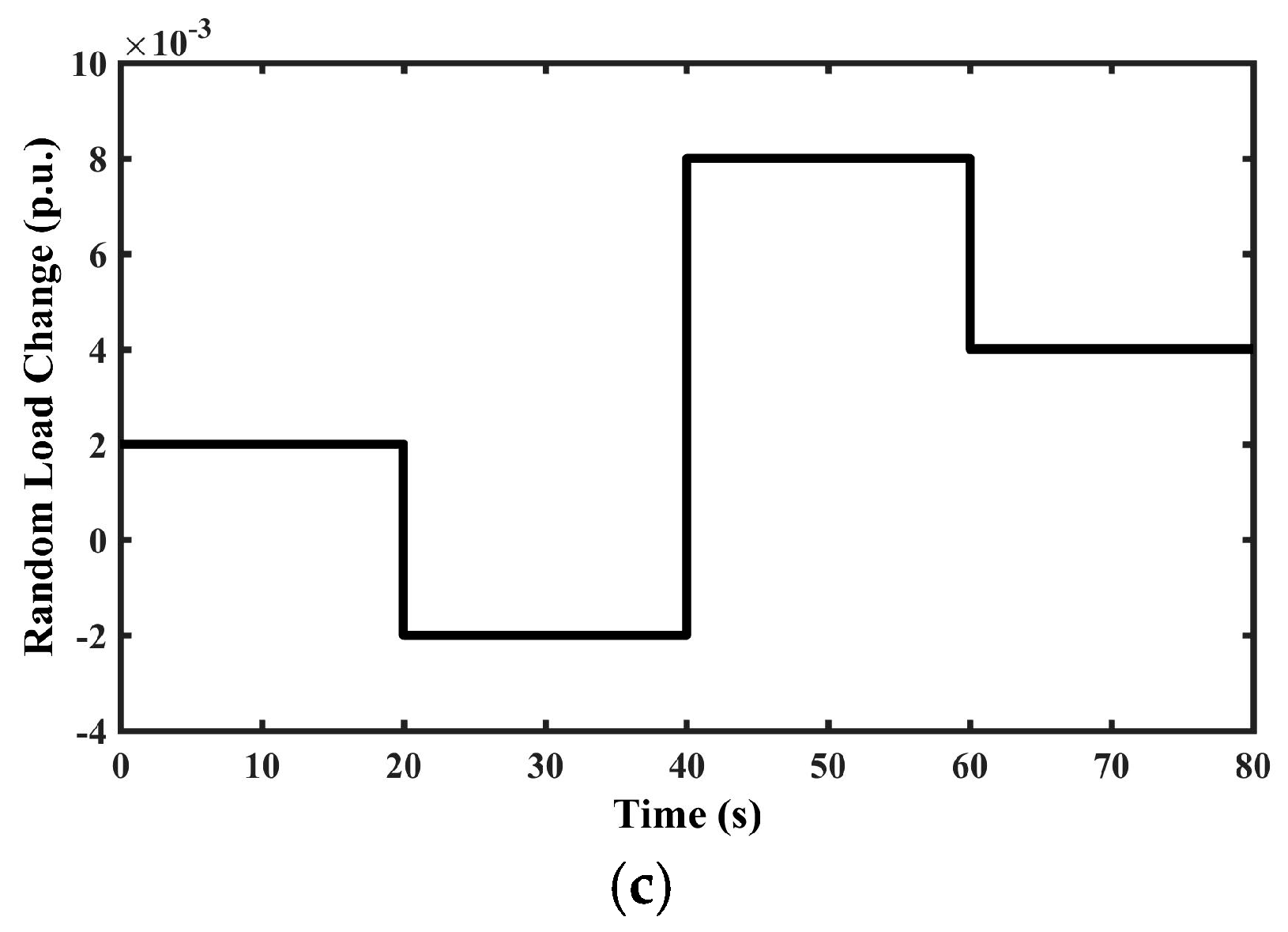
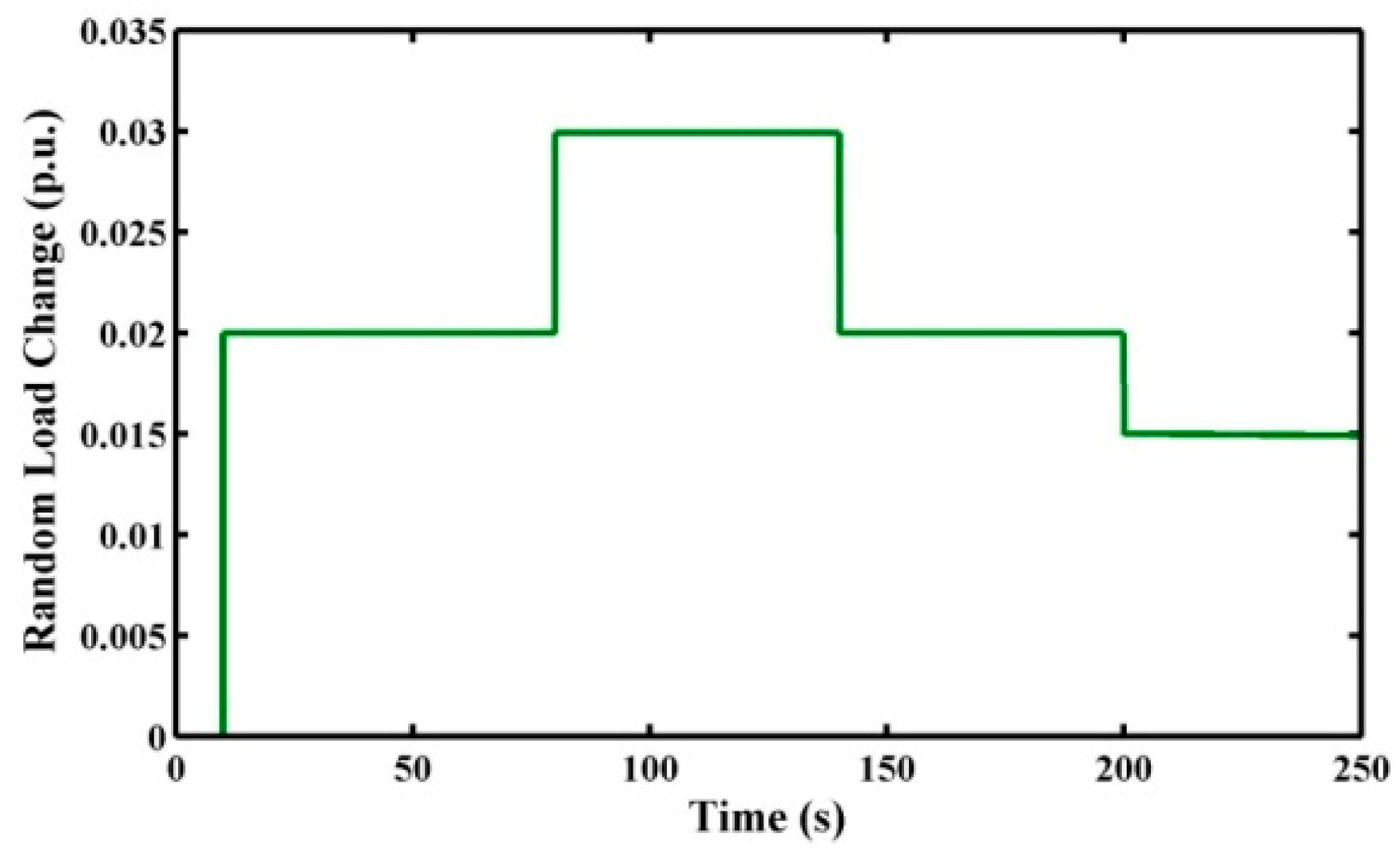
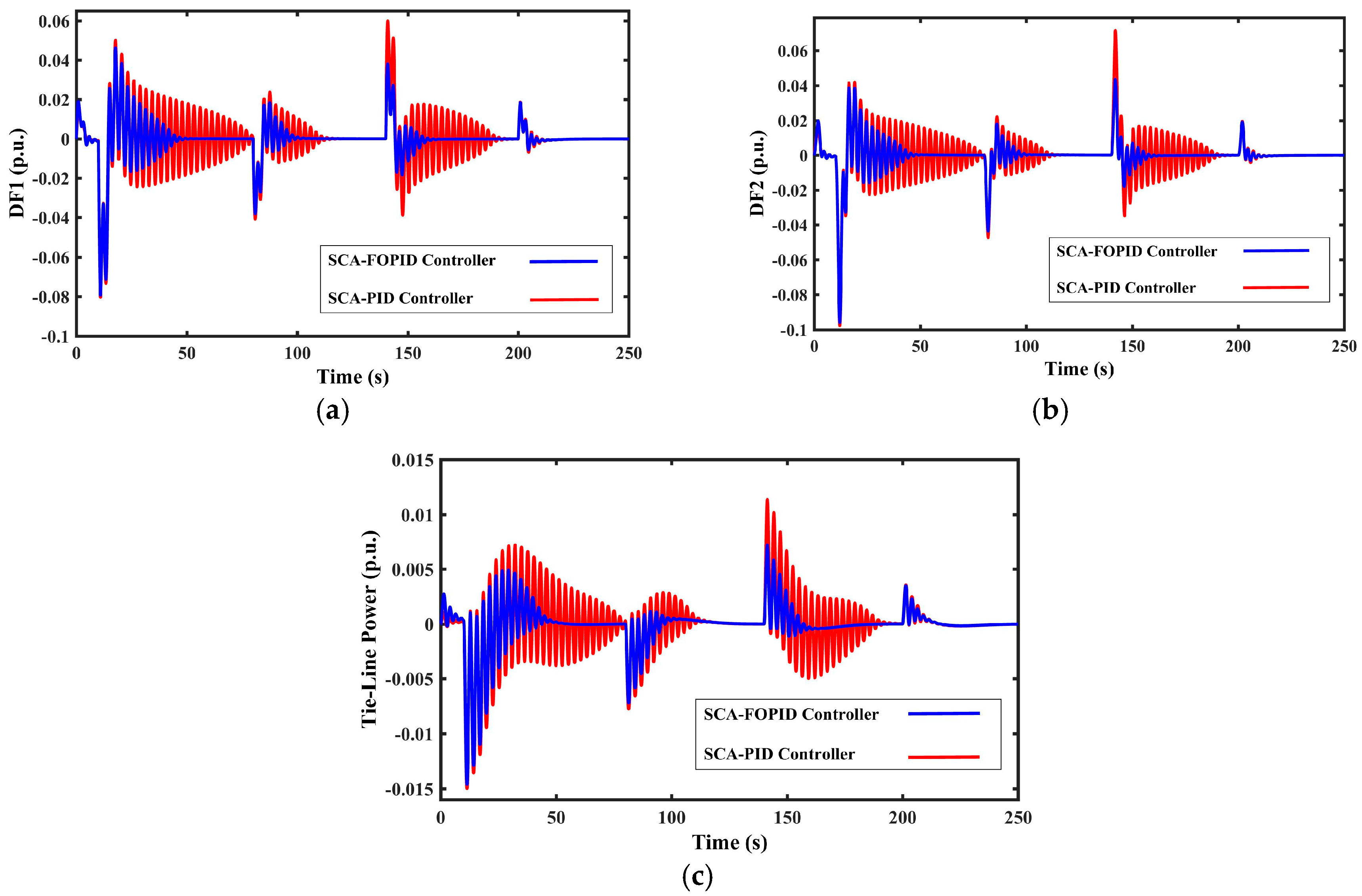
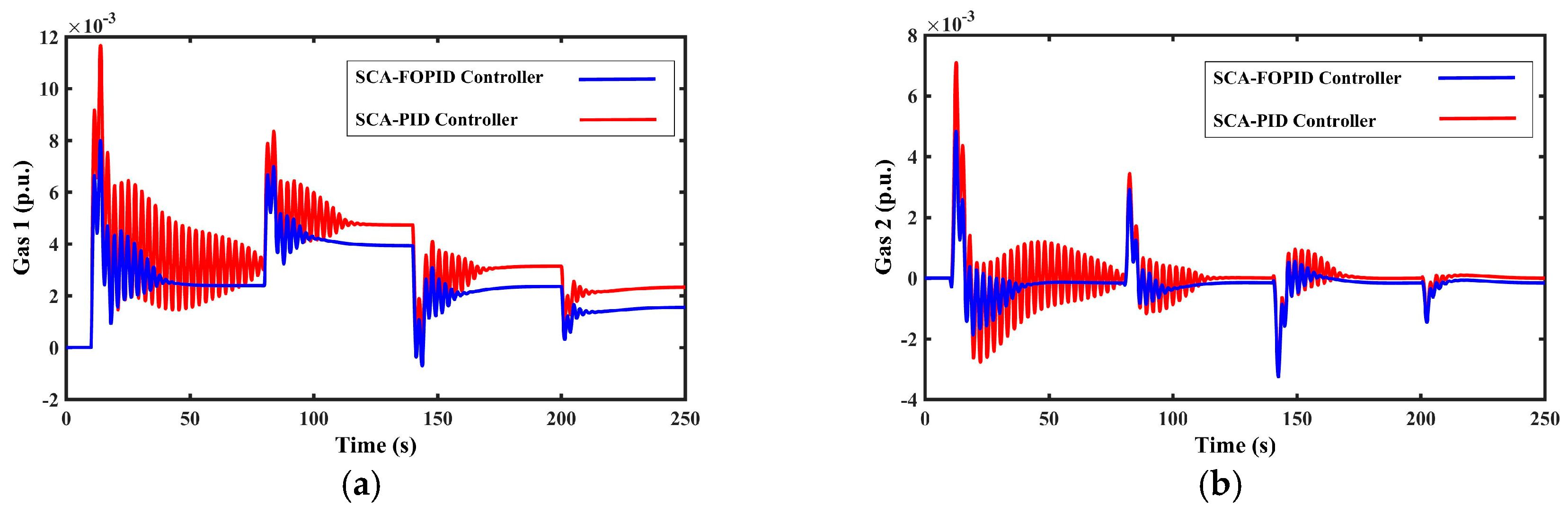
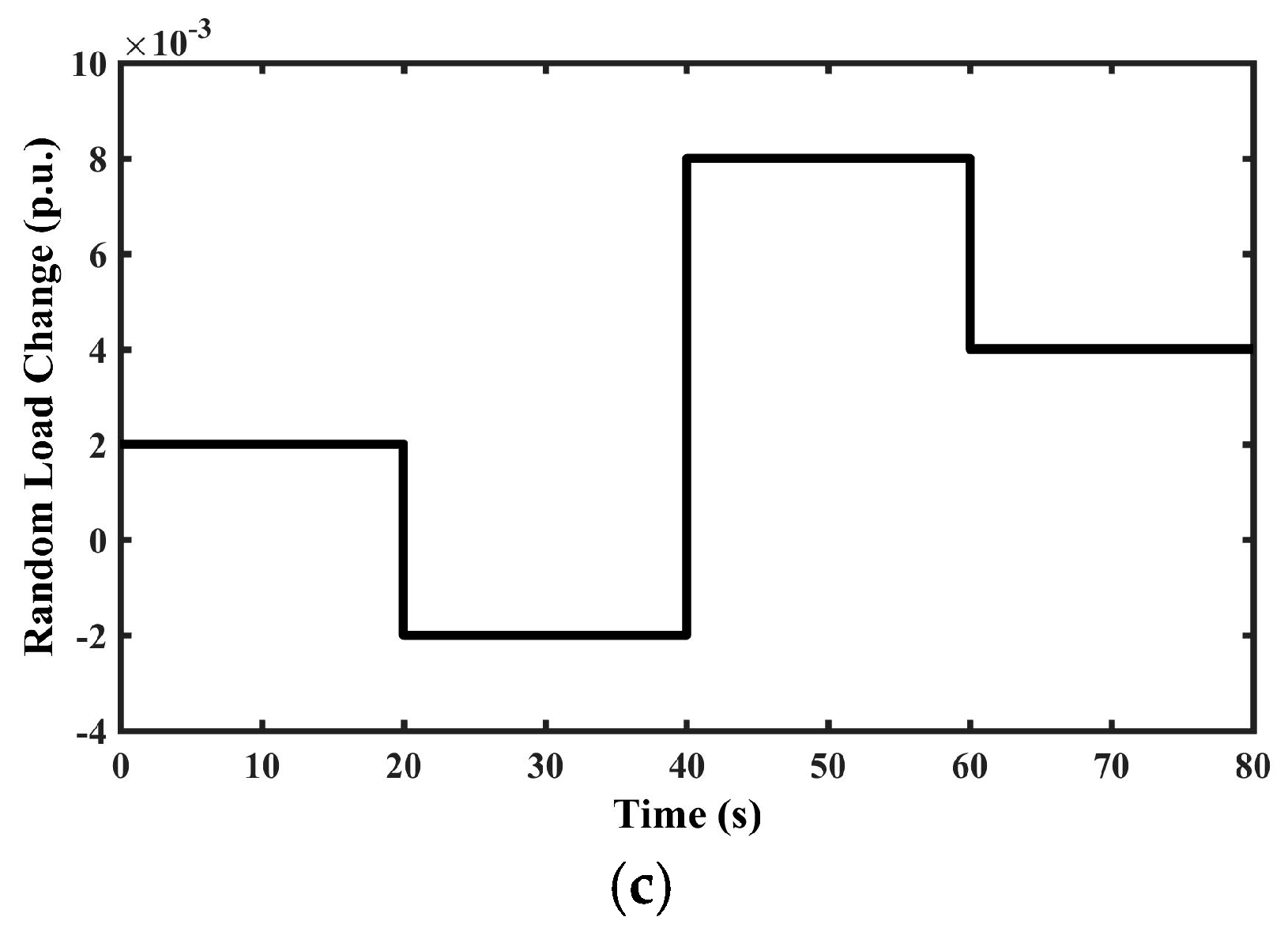
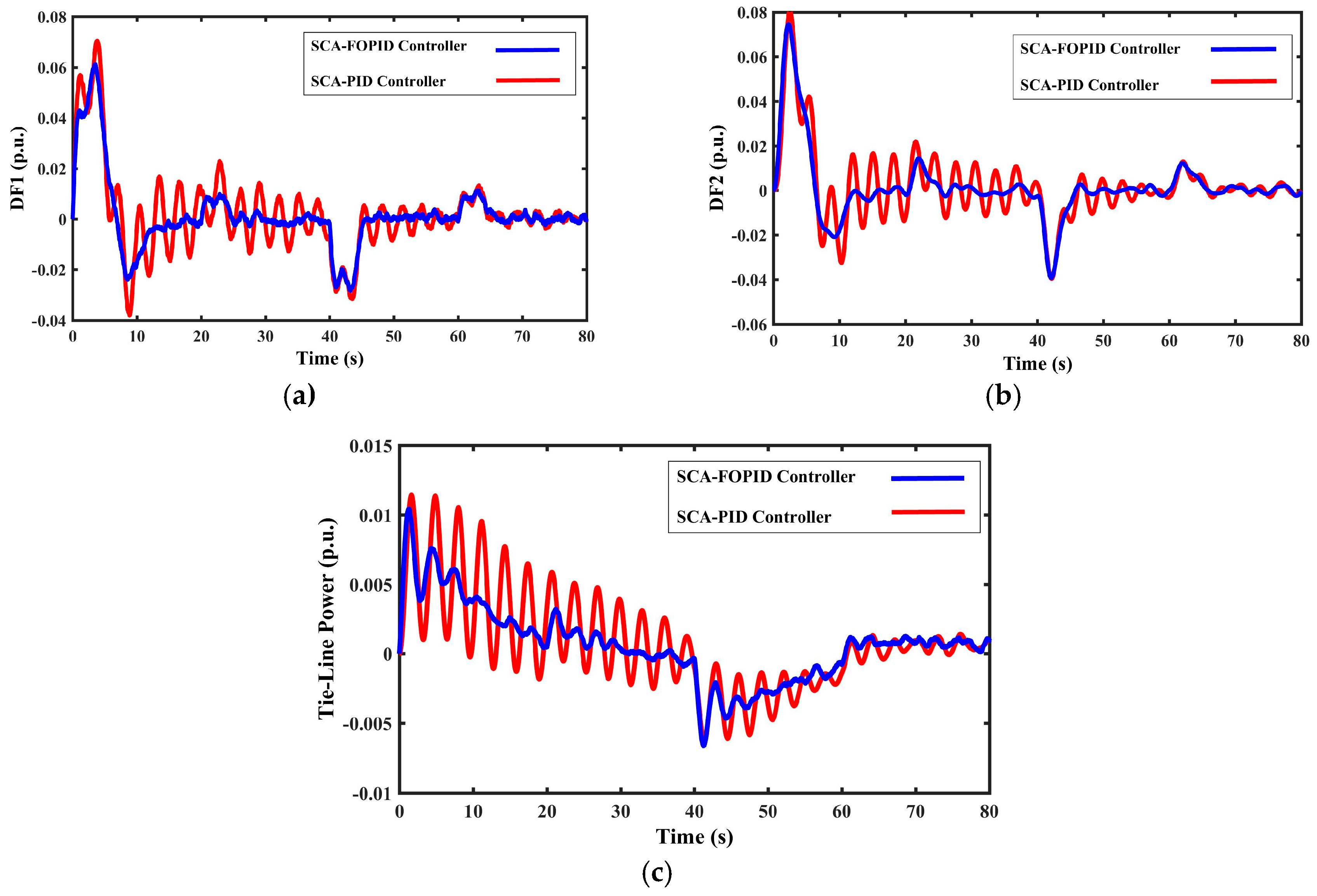
4.2. Second Scenario: Random Load Change
- Good frequency tracking after load changes in the system;
- Desirable oscillation damping due to;
- Reduction of the generation rate in generation units.
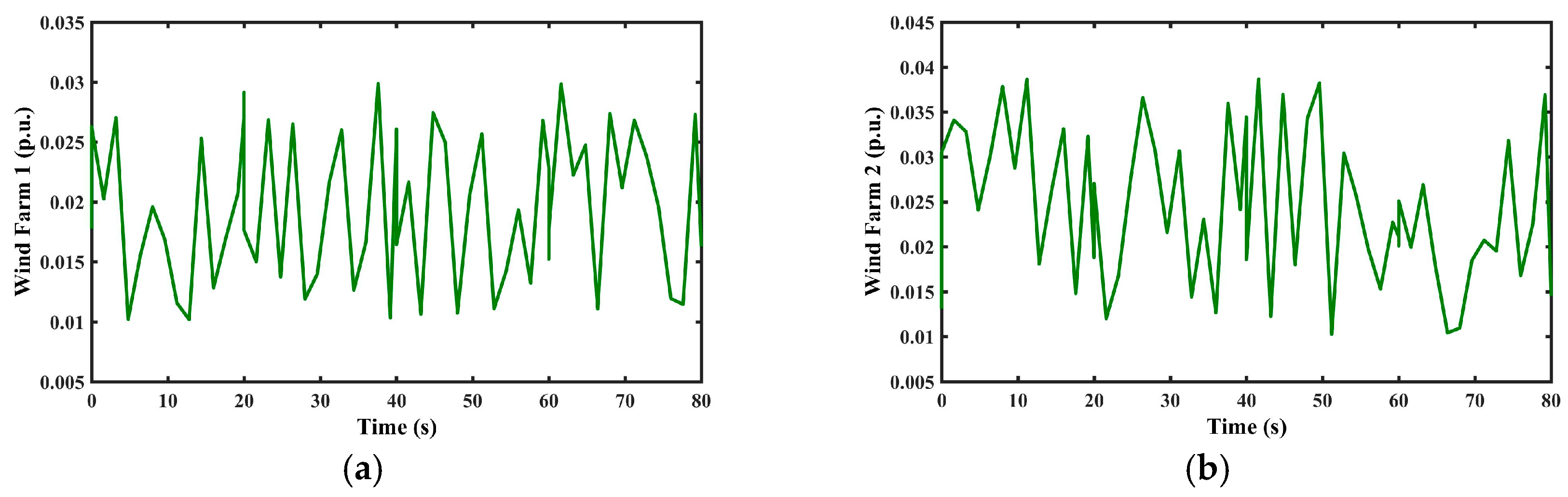
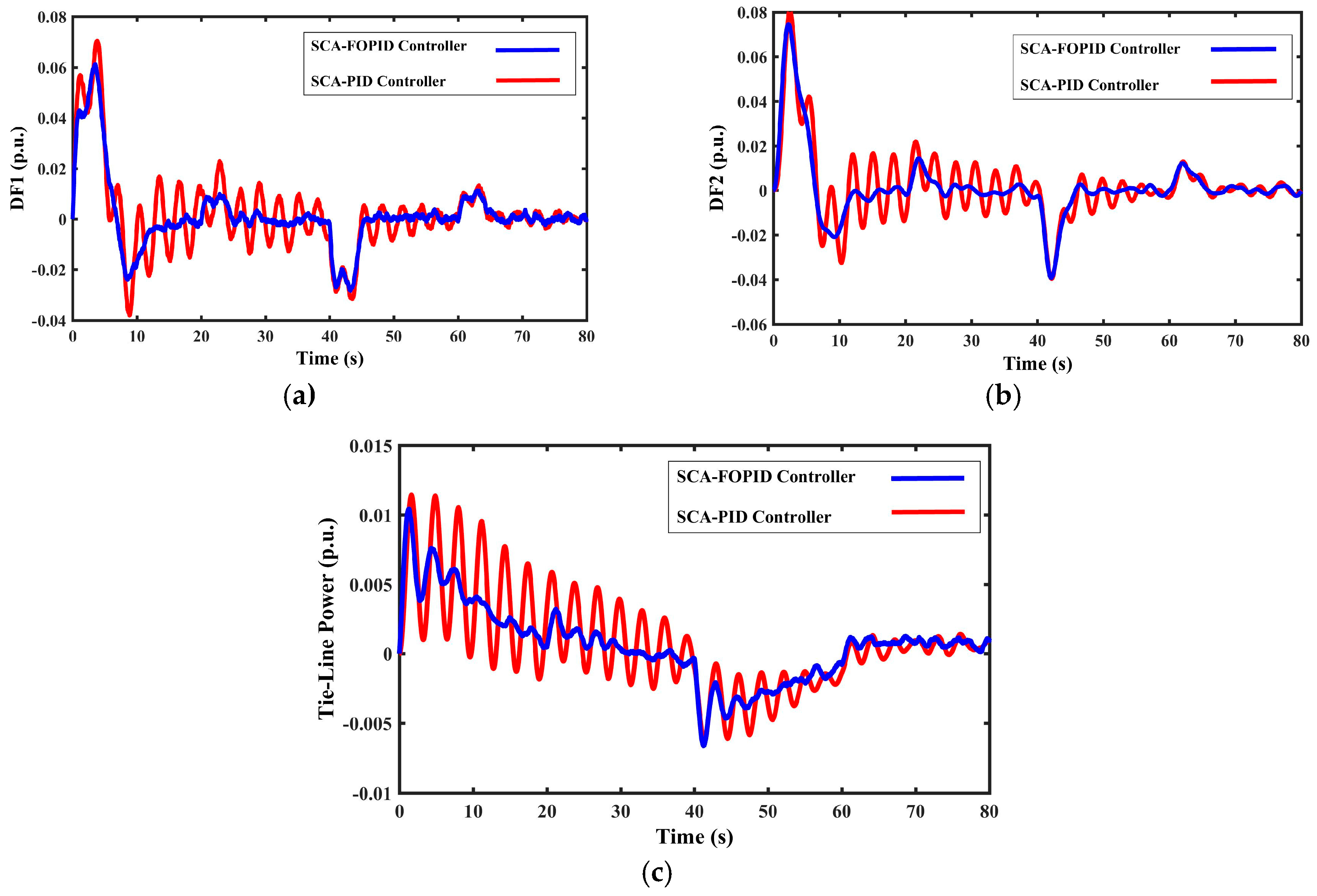
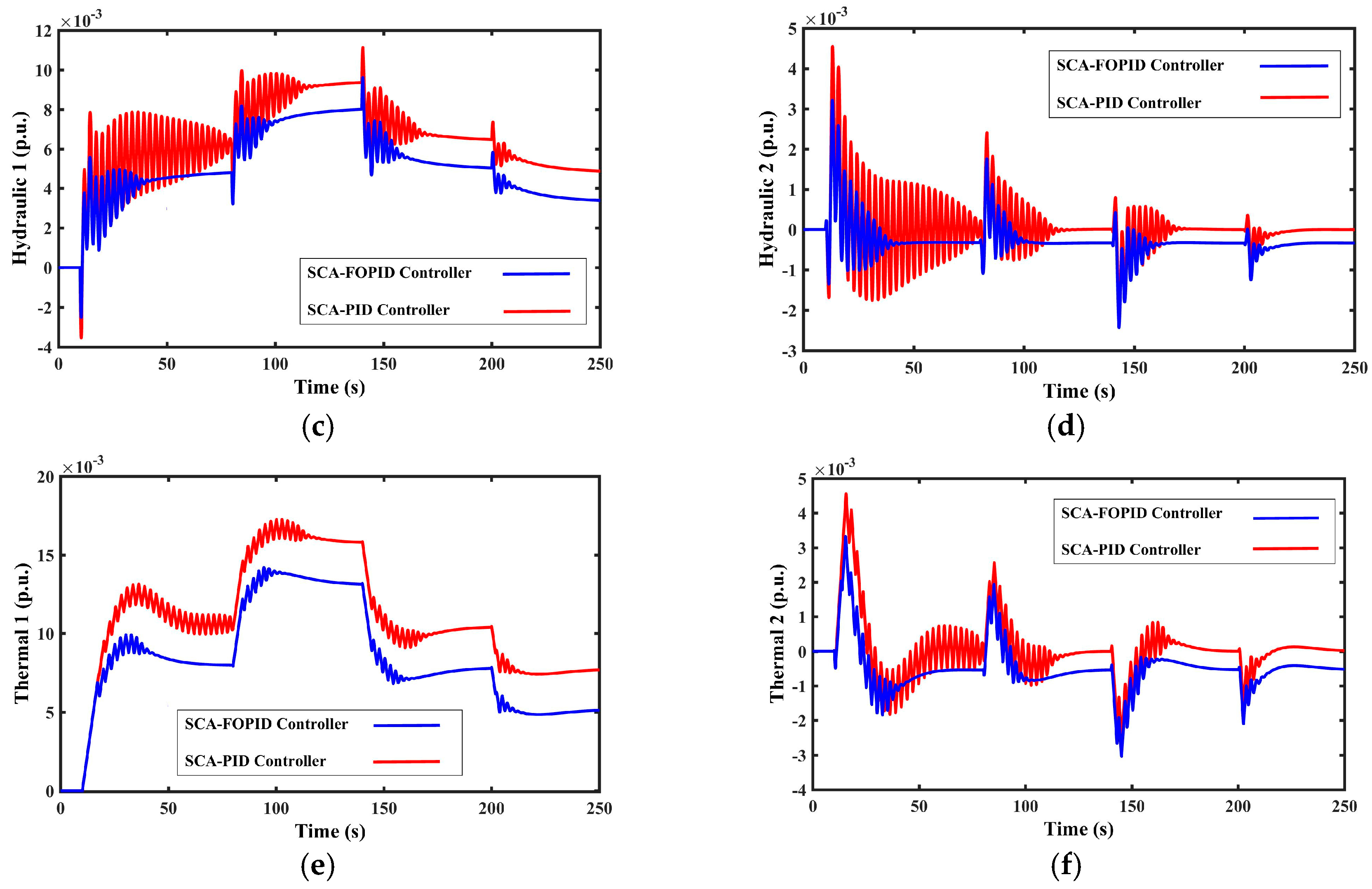
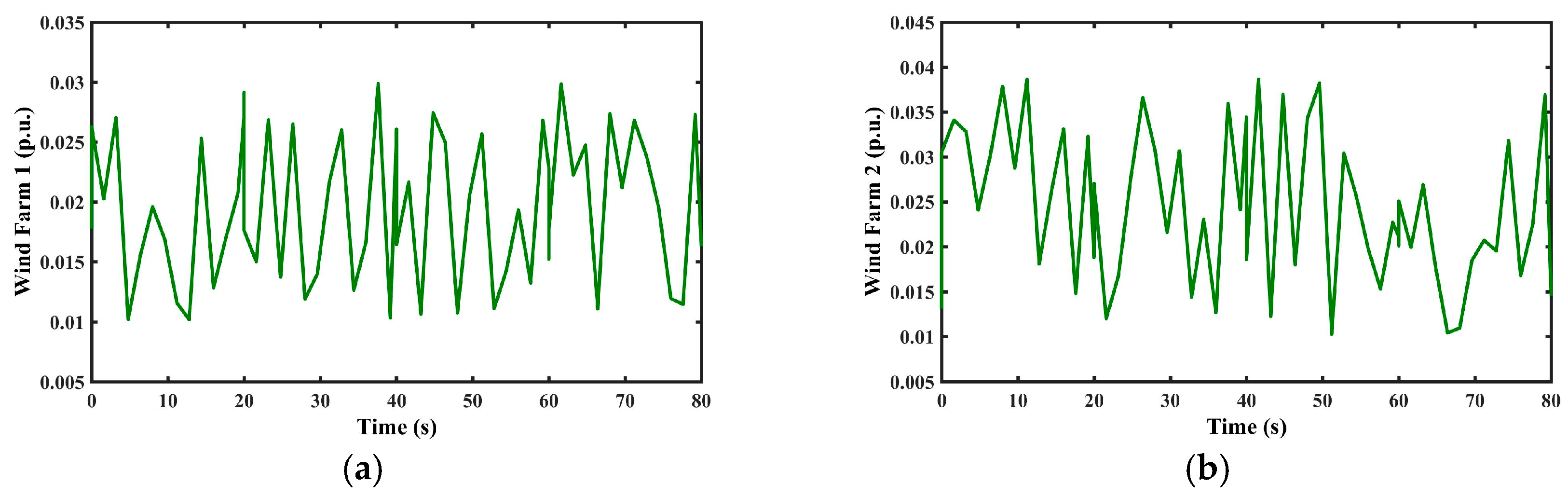
4.3. Third Scenario: Intermittent Generated Power by Wind Farm and Load Change
4.4. Fourth Scenario: Inertia Deviation Analysis
5. Conclusions and Future Work
Author Contributions
Conflicts of Interest
Nomenclature
| Governor speed regulation parameters of thermal, hydro and gas units | Participation factors of thermal, gas and hydro units | ||
| Governor time constant of steam turbine | Time constant of the valve positioner | ||
| Steam turbine time constant | Hydro turbine governor time constant | ||
| Starting time of water in hydro turbine | Compressor discharge volume time constant | ||
| Steam turbine reheat constant | Gas turbine valve positioner | ||
| Steam turbine reheat time constant | Gas turbine fuel time constant | ||
| Power system time constants | Gas turbine combustion reaction time delay | ||
| Lead time constant of gas turbine governor | Hydro turbine speed governor reset time | ||
| Lag time constant of gas turbine governor | Synchronizing coefficient | ||
| Frequency bias coefficients | Power system gains |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
References
- Eremia, M.; Shahidehpour, M. Handbook of Electrical Power System Dynamics: Modeling, Stability, and Control; John Wiley and Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Machowski, J. Power System Dynamics: Stability and Control, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Bevrani, H. Robust Power System Frequency Control, 2nd ed.; Springer: Berlin, Gemany, 2014. [Google Scholar]
- Babahajiani, P.; Shafiee, Q.; Bevrani, H. Intelligent demand response contribution in frequency control of multi-area power systems. IEEE Trans. Smart Grid 2016. [Google Scholar] [CrossRef]
- Qi, Y.; Wang, D.; Jia, H.; Pu, T.; Chen, N.; Liu, K. Frequency control ancillary service provided by efficient power plants integrated in queuing-controlled domestic water heaters. Energies 2017, 10, 559. [Google Scholar] [CrossRef]
- Ma, K.; Yuan, C.; Yang, J.; Liu, Z.; Guan, X. Switched control strategies of aggregated commercial HVAC systems for demand response in smart grids. Energies 2017, 10, 953. [Google Scholar] [CrossRef]
- Motalleb, M.; Thornton, M.; Reihani, E.; Ghorbani, R. Providing frequency regulation reserve services using demand response scheduling. Energy Convers. Manag. 2016, 124, 439–452. [Google Scholar] [CrossRef]
- Mu, Y.; Wu, J.; Ekanayake, J.; Jenkins, N.; Jia, H. Primary frequency response from electric vehicles in the great Britain power system. IEEE Trans. Smart Grid 2013, 4, 1142–1150. [Google Scholar] [CrossRef]
- Brenna, M.; Foiadelli, F.; Longo, M.; Zaninelli, D. e-Mobility forecast for the transnational e-corridor planning. IEEE Trans. Intell. Transp. Syst. 2016, 17, 680–689. [Google Scholar] [CrossRef]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.; Abdel-Gawad, A.F.; Matayoshi, H. A polar fuzzy control scheme for hybrid power system using vehicle-to-grid technique. Energies 2017, 10, 1083. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A.; Tada, Y. System frequency control by heat pump water heaters (HPWHs) on customer side based on statistical HPWH model in power system with a large penetration of renewable energy sources. In Proceedings of the 2010 International Conference on Power System Technology (POWERCON), Hangzhou, China, 24–28 October 2010. [Google Scholar]
- Han, S.; Han, S.; Sezaki, K. Development of an optimal vehicle-to-grid aggregator for frequency regulation. IEEE Trans. Smart Grid 2010, 1, 65–72. [Google Scholar]
- Izadkhast, S.; Garcia-Gonzalez Frias, P.; Ramirez-Elizondo, L.; Bauer, P. An aggregate model of plug-in electric vehicles including distribution network characteristics for primary frequency control. IEEE Trans. Power Syst. 2016, 31, 2987–2998. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Lin, J. Decentralized vehicle-to-grid control for primary frequency regulation considering charging demands. IEEE Trans. Power Syst. 2013, 28, 3480–3489. [Google Scholar] [CrossRef]
- Liu, H.; Hu, Z.; Song, Y.; Wang, J.; Xie, X. Vehicle-to-Grid Control for Supplementary Frequency Regulation Considering Charging Demands. IEEE Trans. Power Syst. 2015, 30, 3110–3119. [Google Scholar] [CrossRef]
- Masuta, T.; Yokoyama, A. Supplementary load frequency control by use of a number of both electric vehicles and heat pump water heaters. IEEE Trans. Smart Grid 2012, 3, 1253–1262. [Google Scholar] [CrossRef]
- Meng, J.; Mu, Y.; Jia, H.; Wu, J.; Yu, X.; Qu, B. Dynamic frequency response from electric vehicles considering travelling behavior in the Great Britain power system. Appl. Energy 2016, 162, 966–979. [Google Scholar] [CrossRef]
- Falahati, S.; Taher, S.; Shahidehpour, M. Grid frequency control with electric vehicles by using of an optimized fuzzy controller. Appl. Energy 2016, 178, 918–928. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. Coordinated Control of Wind Turbine Blade Pitch Angle and PHEVs Using MPCs for Load Frequency Control of Microgrid. IEEE Syst. J. 2016, 10, 97–105. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2012, 5, 371–380. [Google Scholar] [CrossRef]
- Debbarma, S.; Dutta, A. Utilizing electric vehicles for LFC in restructured power systems using fractional order controller. IEEE Trans. Smart Grid 2017, 8, 2554–2564. [Google Scholar] [CrossRef]
- Oshnoei, A.; Hagh, M.T.; Khezri, R.; Mohammadi-Ivatloo, B. Application of IPSO and fuzzy logic methods in electrical vehicles for efficient frequency control of multi-area power systems. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; pp. 1349–1354. [Google Scholar]
- Zhong, J.; He, L.; Li, C.; Cao, Y.; Wang, J.; Fang, B.; Zeng, L.; Xiao, G. Coordinated control for large-scale EV charging facilities and energy storage devices participating in frequency regulation. Appl. Energy 2014, 123, 253–262. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust controller design of heat pump and plug-in hybrid electric vehicle for frequency control in a smart microgrid based on specified-structure mixed control technique. Appl. Energy 2011, 123, 3860–3868. [Google Scholar] [CrossRef]
- Singh, M.; Kumar, P.; Kar, I. Implementation of vehicle to grid infrastructure using fuzzy logic controller. IEEE Trans Smart Grid 2012, 3, 565–577. [Google Scholar] [CrossRef]
- Senjyu, T.; Tokudome, M.; Yona, A.; Funabashi, T. A frequency control approach by decentralized controllable loads in small power systems. In Proceedings of the IEEE 2nd International Power and Energy Conference (PECon 2008), Johor Bahru, Malaysia, 1–3 December 2008; pp. 1074–1080. [Google Scholar]
- Kundur, P. Power System Stability and Control; McGraw-Hill: New York, NY, USA, 1994. [Google Scholar]
- Zare, K.; Hagh, M.T.; Morsali, J. Effective oscillation damping of an interconnected multi-source power system with automatic generation control and TCSC. Int. J. Electr. Power Energy Syst. 2015, 65, 220–230. [Google Scholar] [CrossRef]
- Khezri, R.; Golshannavaz, S.; Shokoohi, S.; Bevrani, H. Fuzzy Logic Based Fine-tuning Approach for Robust Load Frequency Control in a Multi-area Power System. Electr. Power Compon. Syst. 2016, 44, 2073–2083. [Google Scholar] [CrossRef]
- Golshannavaz, S.; Khezri, R.; Esmaeeli, M.; Siano, P.L. A two-stage robust-intelligent controller design for efficient LFC based on Kharitonov theorem and fuzzy logic. J. Ambient Intell. Hum. Comput. 2017, 1–10. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Fractional order AGC for distributed energy resources using robust optimization. IEEE Trans. Smart Grid 2015, 7, 2175–2186. [Google Scholar] [CrossRef]
- Das, S.; Pan, I. On the mixed loop-shaping tradeoffs in fractional-order control of the AVR system. IEEE Trans. Ind. Inform. 2014, 10, 1982–1992. [Google Scholar] [CrossRef]
- Swati, S.; Yogesh, V.H. Fractional order PID controller for load frequency control. Energy Convers. Manag. 2014, 85, 343–353. [Google Scholar]
- Bevrani, H.; Hiyama, T. Intelligent Automatic Generation Control; CRC Press: New York, NY, USA, 2011. [Google Scholar]
- Mirjalili, S. SCA: A sine cosine algorithm for solving optimization problems. Knowl.-Based Syst. 2016, 96, 120–133. [Google Scholar] [CrossRef]

| Controller Type | Areas | λ | μ | |||
|---|---|---|---|---|---|---|
| FOPID-EV | Area 1 | 0.9884 | −49.5249 | 0.7378 | 0.6704 | 0.6544 |
| FOPID-HP | Area 1 | 0.6021 | 4.0225 | 0.699 | 0.4755 | 0.5298 |
| FOPID-AGC | Area 1 | 0.9123 | 0.3865 | 0.5927 | 0.7014 | 0.6839 |
| PID-EV | Area 1 | 0.8382 | −33.0185 | 0.4237 | - | - |
| PID-HP | Area 1 | 0.7707 | −29.1804 | 0.359 | - | - |
| PID-AGC | Area 1 | 0.8544 | 0.2979 | 0.584 | - | - |
| FOPID-EV | Area 2 | 0.2218 | −27.2737 | 0.382 | 0.454 | 0.4059 |
| FOPID-HP | Area 2 | 0.7942 | 2.9808 | 0.2378 | 0.4235 | 0.382 |
| FOPID-AGC | Area 2 | 0.5284 | 0.2517 | 0.232 | 0.5012 | 0.4631 |
| PID-EV | Area 2 | 0.5465 | −42.1408 | 0.2954 | - | - |
| PID-HP | Area 2 | 0.4119 | −40.1123 | 0.1785 | - | - |
| PID-AGC | Area 2 | 0.4811 | 0.2977 | 0.5133 | - | - |
| Controller Type | Signal | MDR | PO | PT | ST | ITSE |
|---|---|---|---|---|---|---|
| FOPID EV, HP and AGC | 0.1914 | 0.82 | 0.8265 | 15.0637 | 0.002 | |
| 0.8493 | 1.9337 | 11.3998 | ||||
| −0.5798 | 1.353 | 9.831 | ||||
| PID EV, HP and AGC | 0.3172 | 1.2918 | 0.8457 | 20.2843 | 0.0085 | |
| 1.4368 | 2.0081 | 19.0228 | ||||
| −0.4027 | 1.3988 | 15.9148 | ||||
| Just AGC | 0.0498 | 2.8985 | 0.9309 | 28.1927 | 0.0333 | |
| 3.494 | 2.0776 | 27.1289 | ||||
| −0.2607 | 1.3934 | 26.5925 |
| Controller Type | Signal | MDR | PO | PT (s) | ST (s) | ITSE |
|---|---|---|---|---|---|---|
| FOPID EV, HP and AGC | 0.157 | 0.8296 | 0.8265 | 15.692 | 0.0021 | |
| 0.6827 | 2.0474 | 12.0101 | ||||
| −0.5588 | 1.4045 | 10.2723 | ||||
| FOPID EV, HP and AGC | 0.2331 | 0.8047 | 0.8175 | 13.9472 | 0.0019 | |
| 1.0629 | 1.7901 | 12.4747 | ||||
| −0.6099 | 1.2731 | 10.9536 | ||||
| PID EV, HP and AGC | 0.299 | 1.3178 | 0.8417 | 18.6309 | 0.0069 | |
| 1.1718 | 2.1419 | 17.3286 | ||||
| −0.3812 | 1.4602 | 12.9268 | ||||
| PID EV, HP and AGC | 0.3408 | 1.3386 | 0.8053 | 24.487 | 0.0162 | |
| 1.9065 | 1.8441 | 24.6646 | ||||
| −0.4284 | 1.2821 | 23.9932 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khezri, R.; Oshnoei, A.; Tarafdar Hagh, M.; Muyeen, S. Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies 2018, 11, 420. https://doi.org/10.3390/en11020420
Khezri R, Oshnoei A, Tarafdar Hagh M, Muyeen S. Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies. 2018; 11(2):420. https://doi.org/10.3390/en11020420
Chicago/Turabian StyleKhezri, Rahmat, Arman Oshnoei, Mehrdad Tarafdar Hagh, and SM Muyeen. 2018. "Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers" Energies 11, no. 2: 420. https://doi.org/10.3390/en11020420
APA StyleKhezri, R., Oshnoei, A., Tarafdar Hagh, M., & Muyeen, S. (2018). Coordination of Heat Pumps, Electric Vehicles and AGC for Efficient LFC in a Smart Hybrid Power System via SCA-Based Optimized FOPID Controllers. Energies, 11(2), 420. https://doi.org/10.3390/en11020420