Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles




Abstract
:1. Introduction
2. Design of the Cooperative Braking System
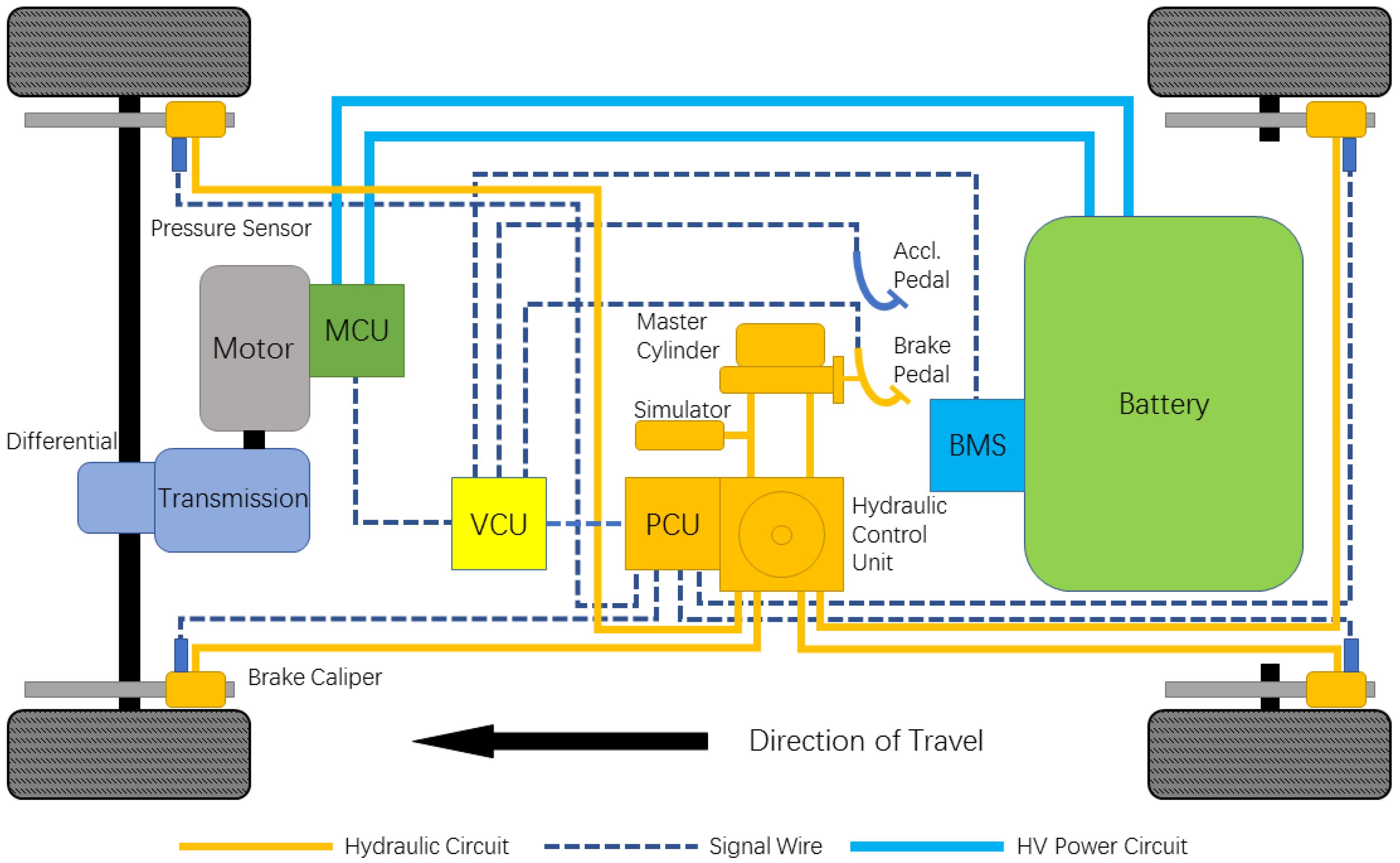
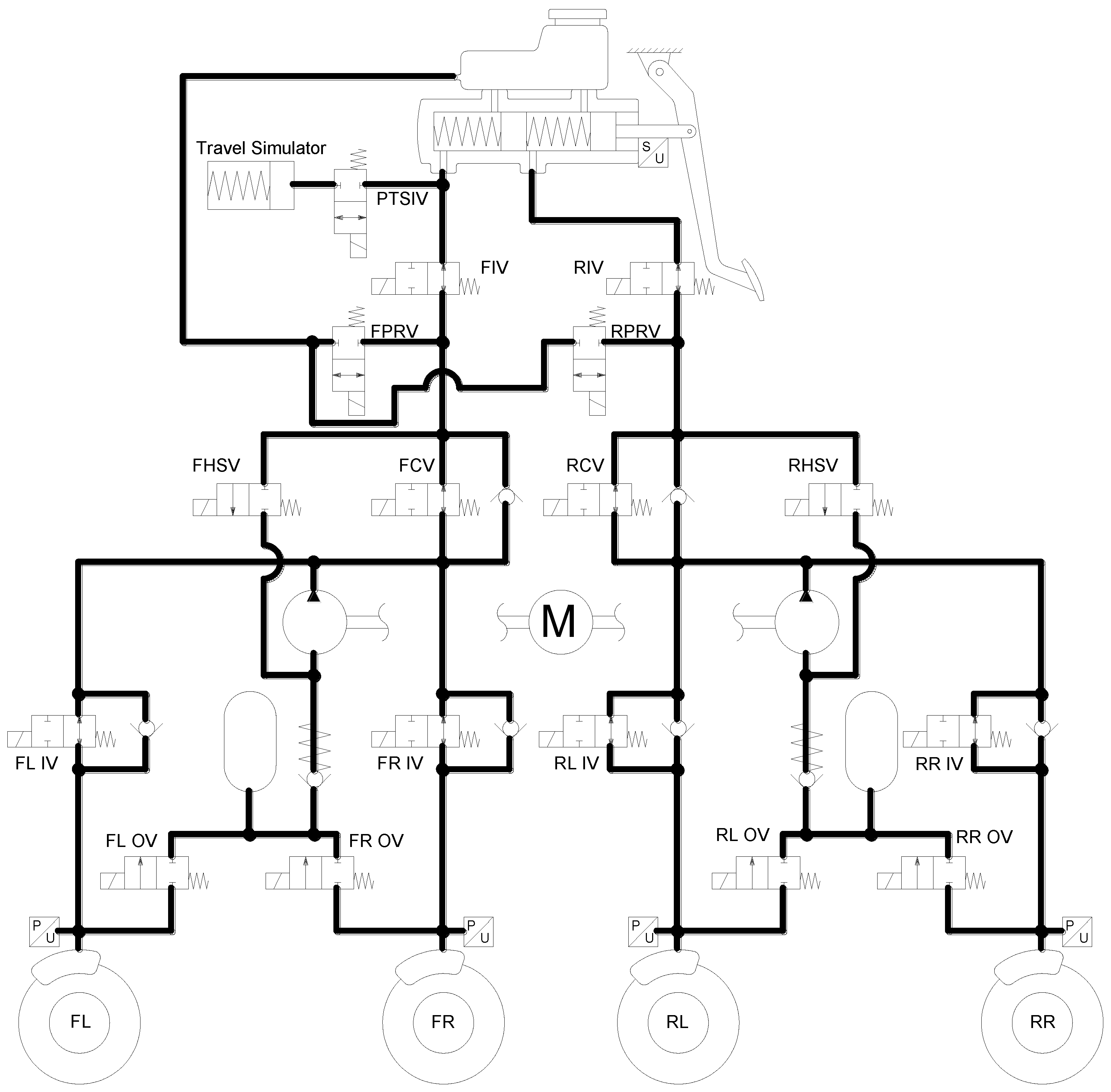
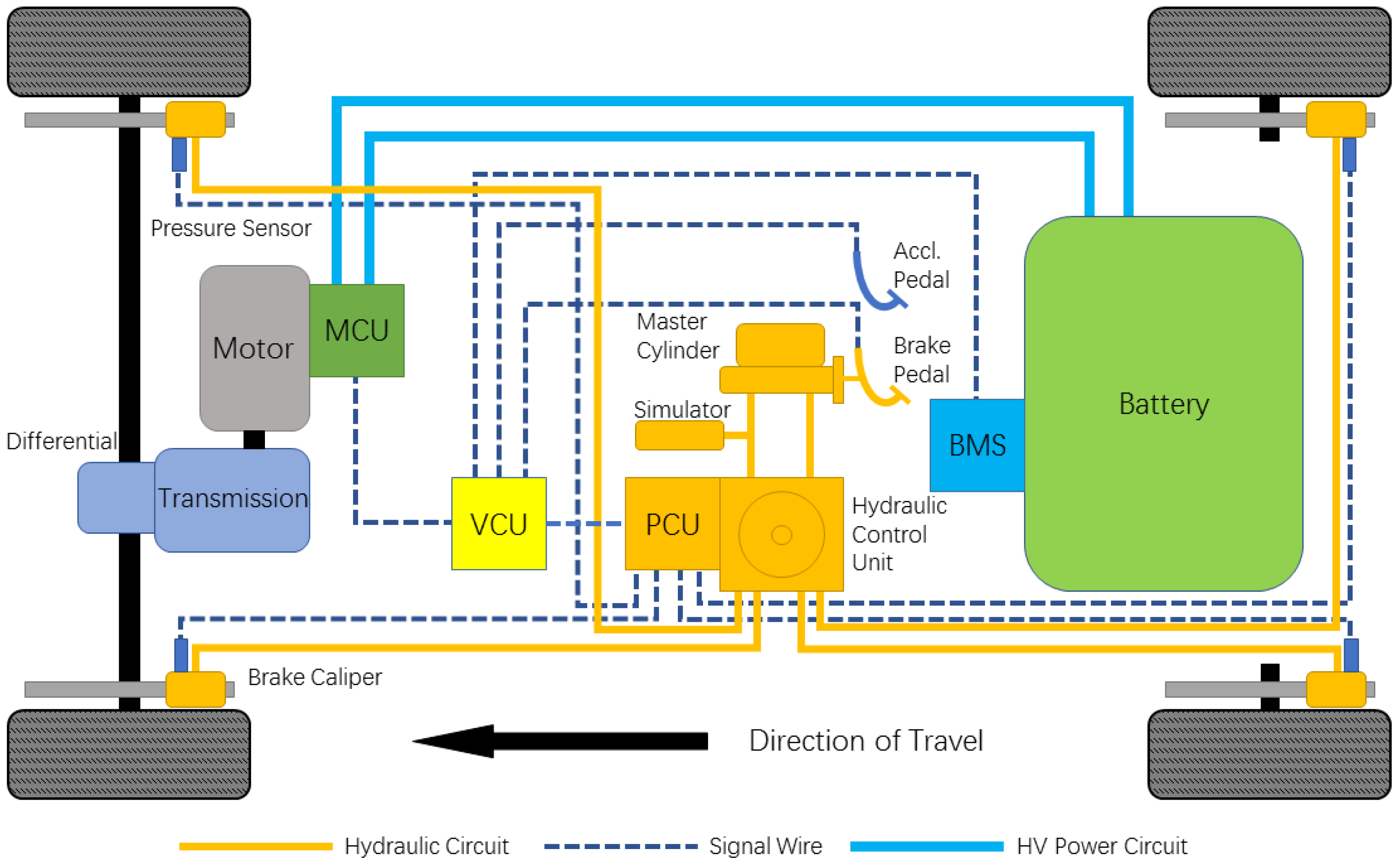
2.1. Design of the Mechanical Structure
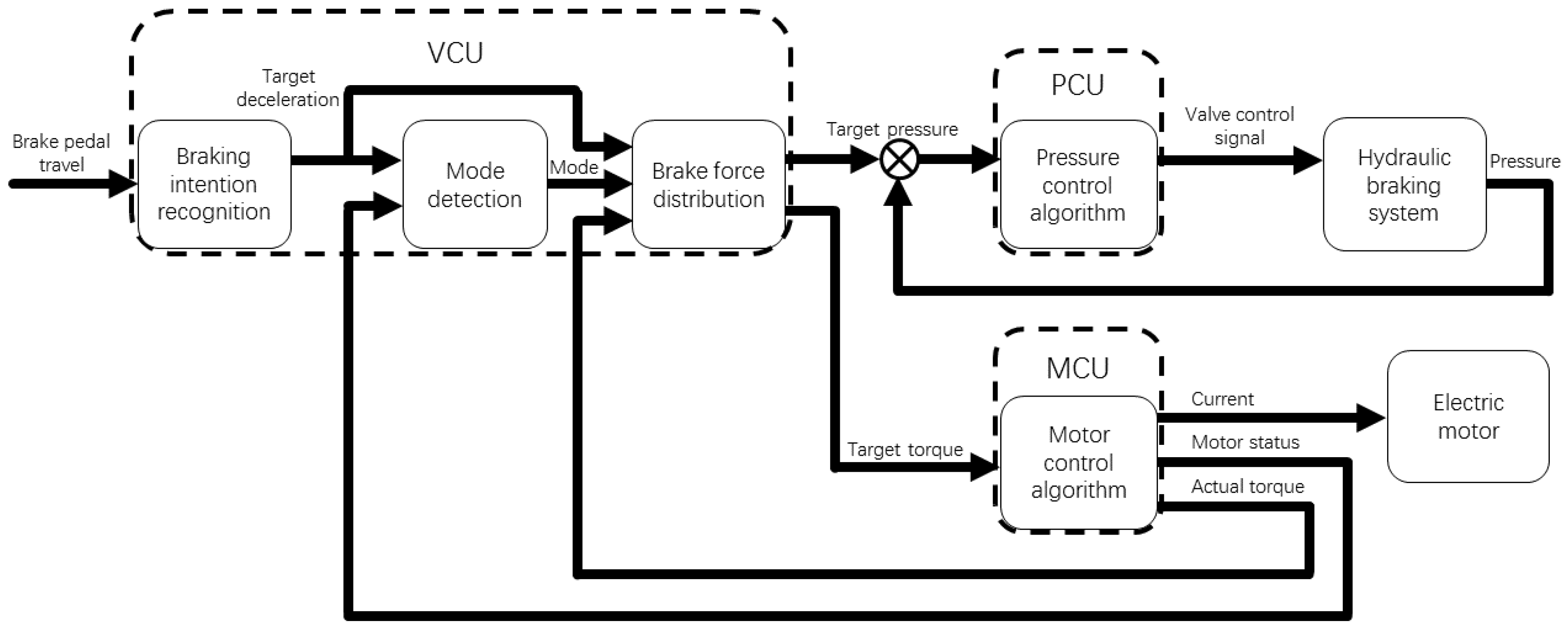
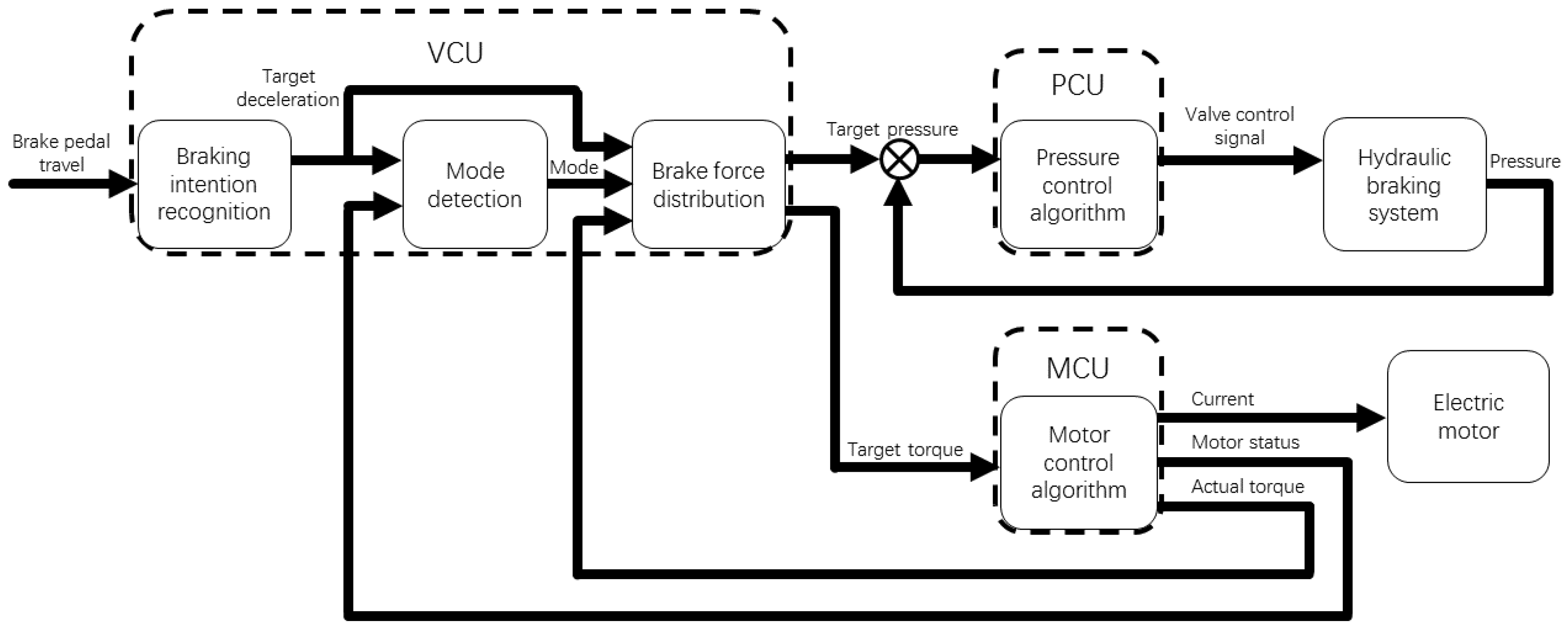
2.2. Design of the Cooperative Braking Controller
2.2.1. Operation Modes of the Cooperative Braking System
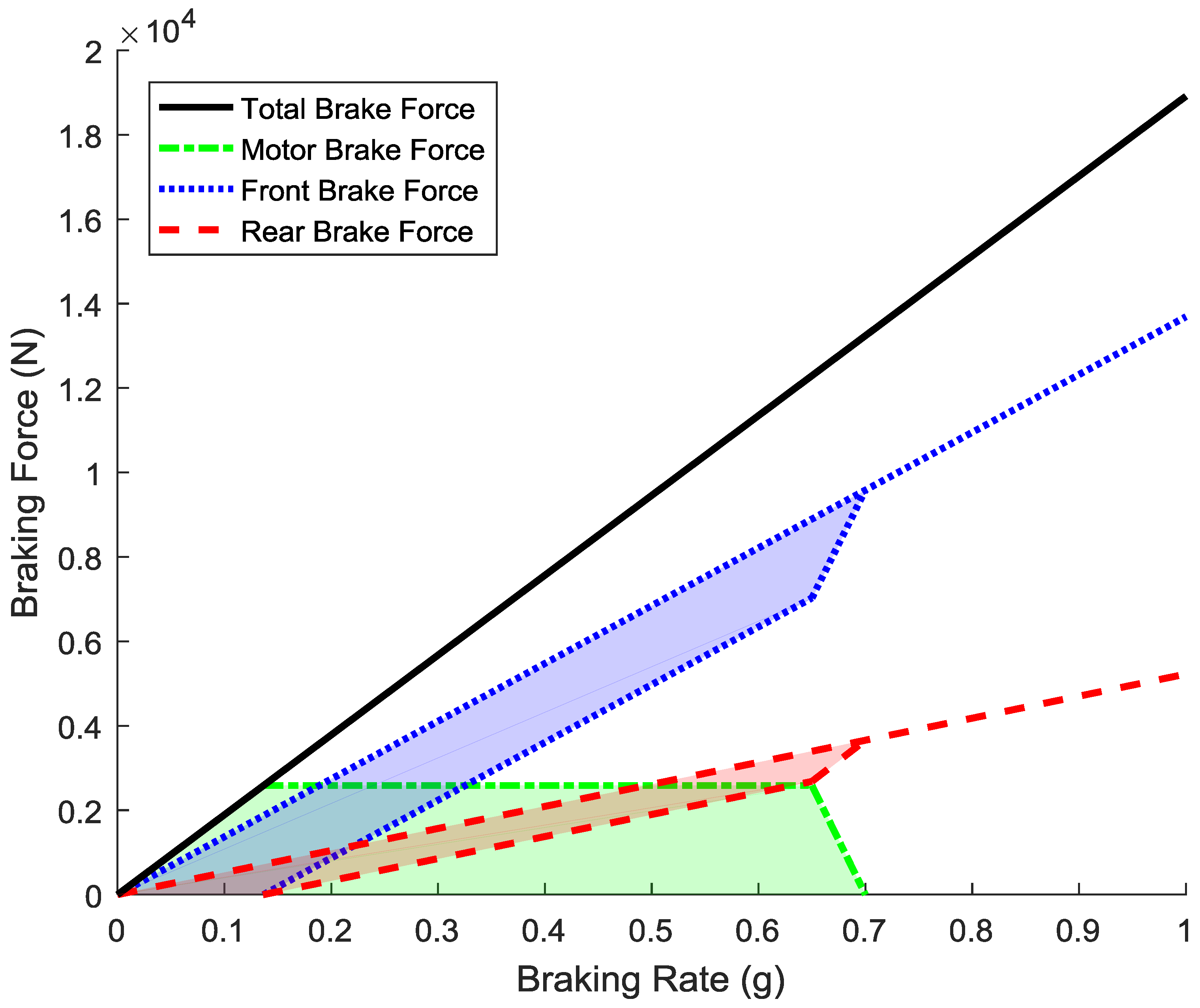
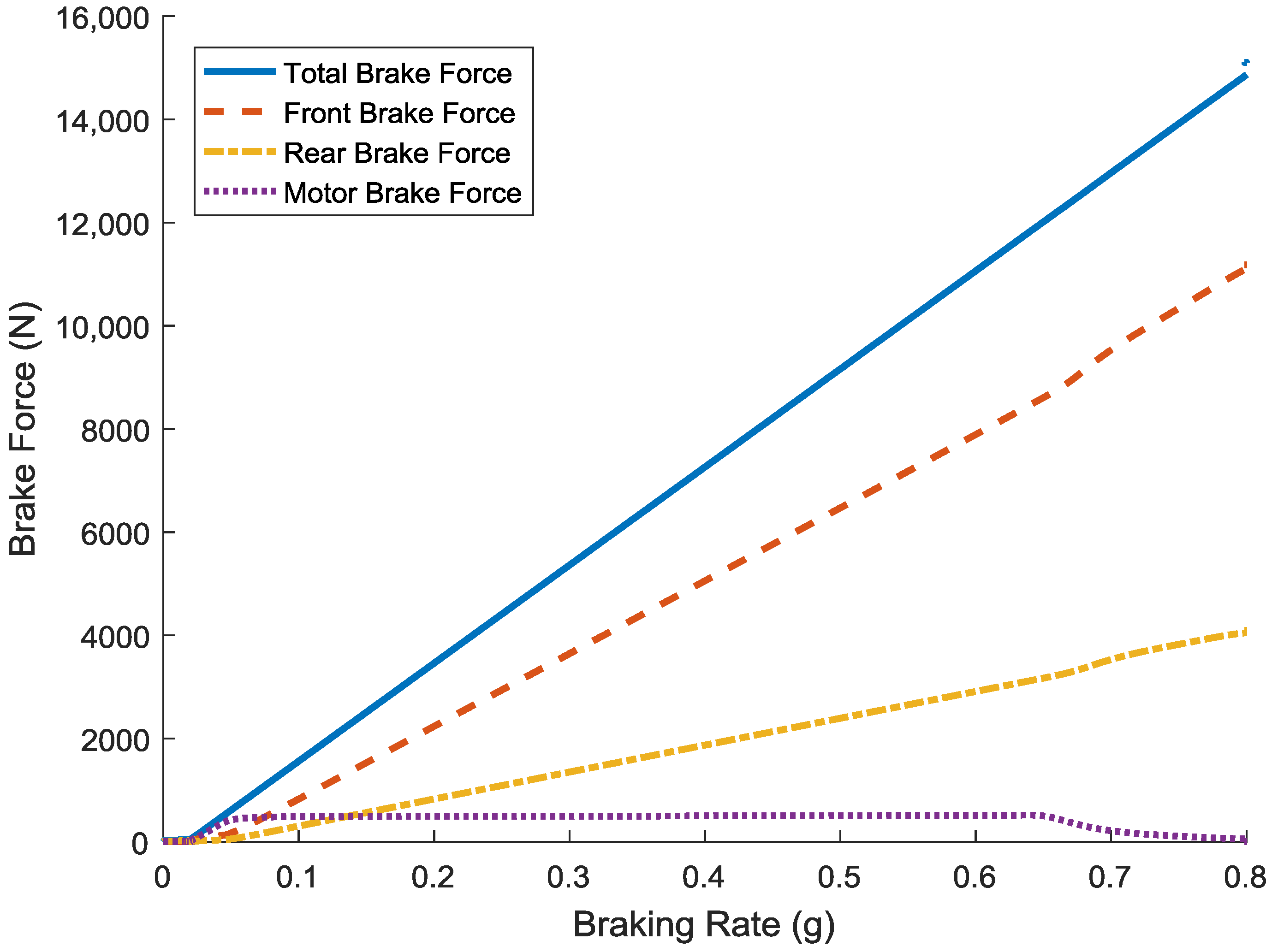
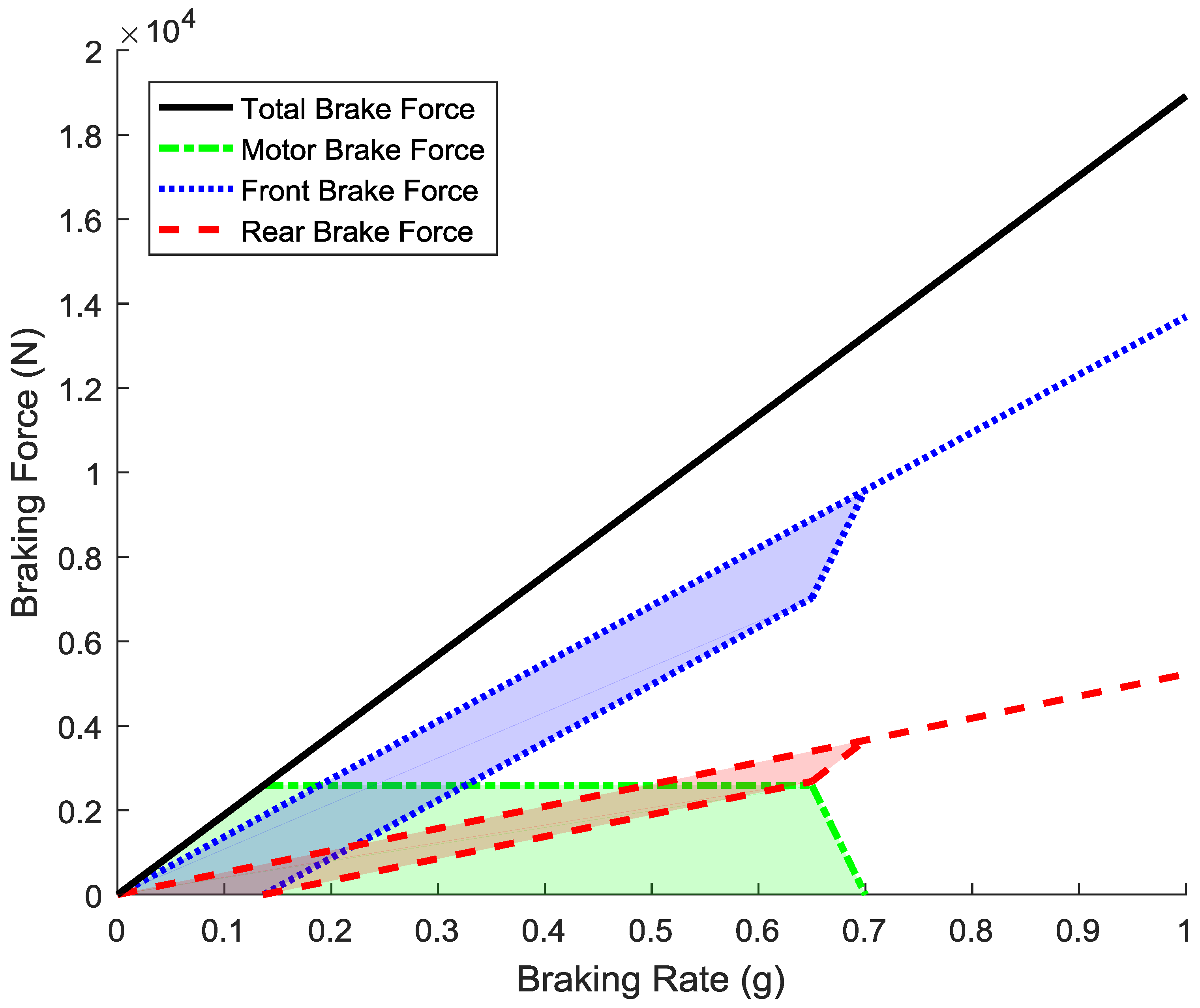
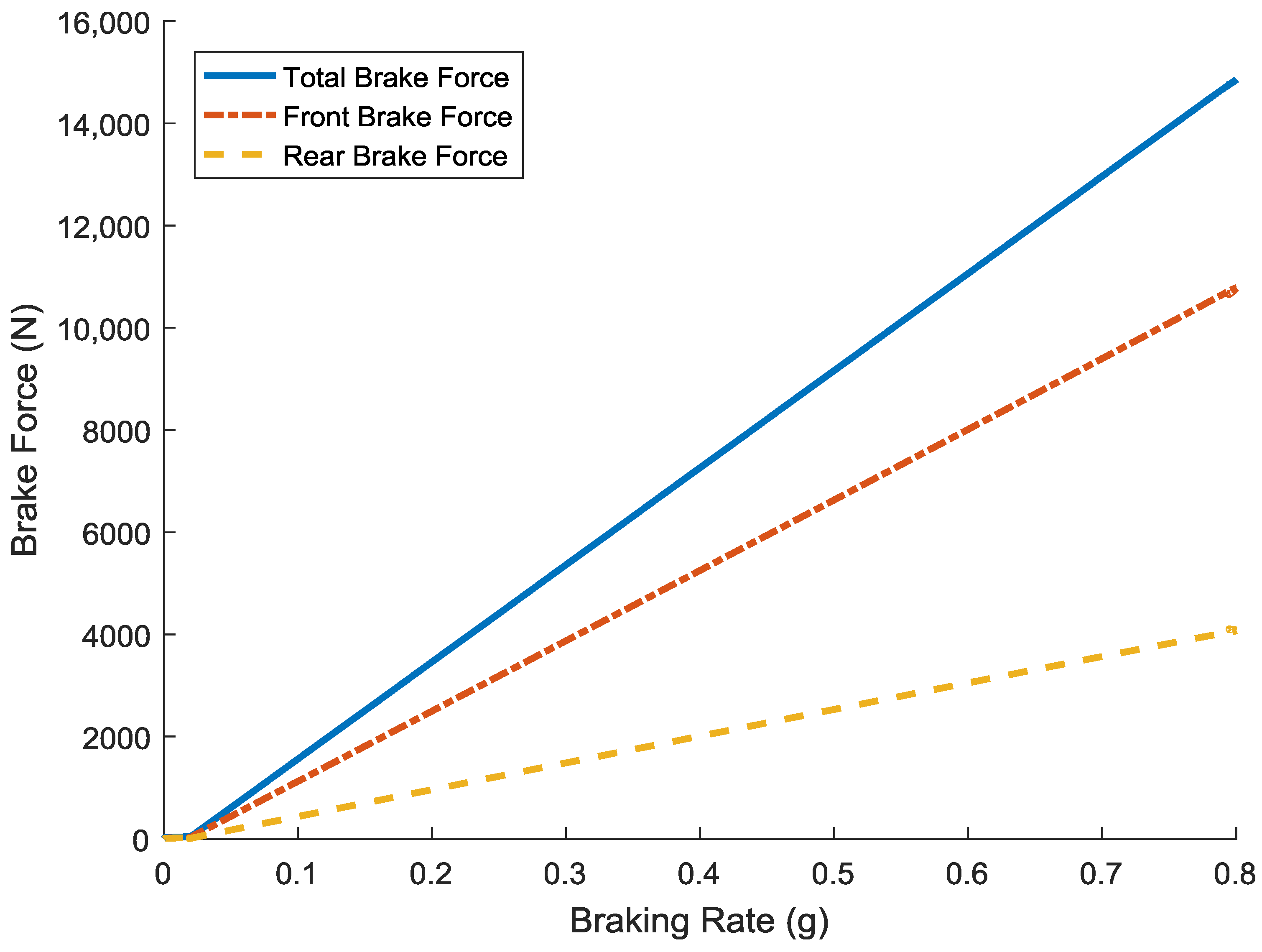
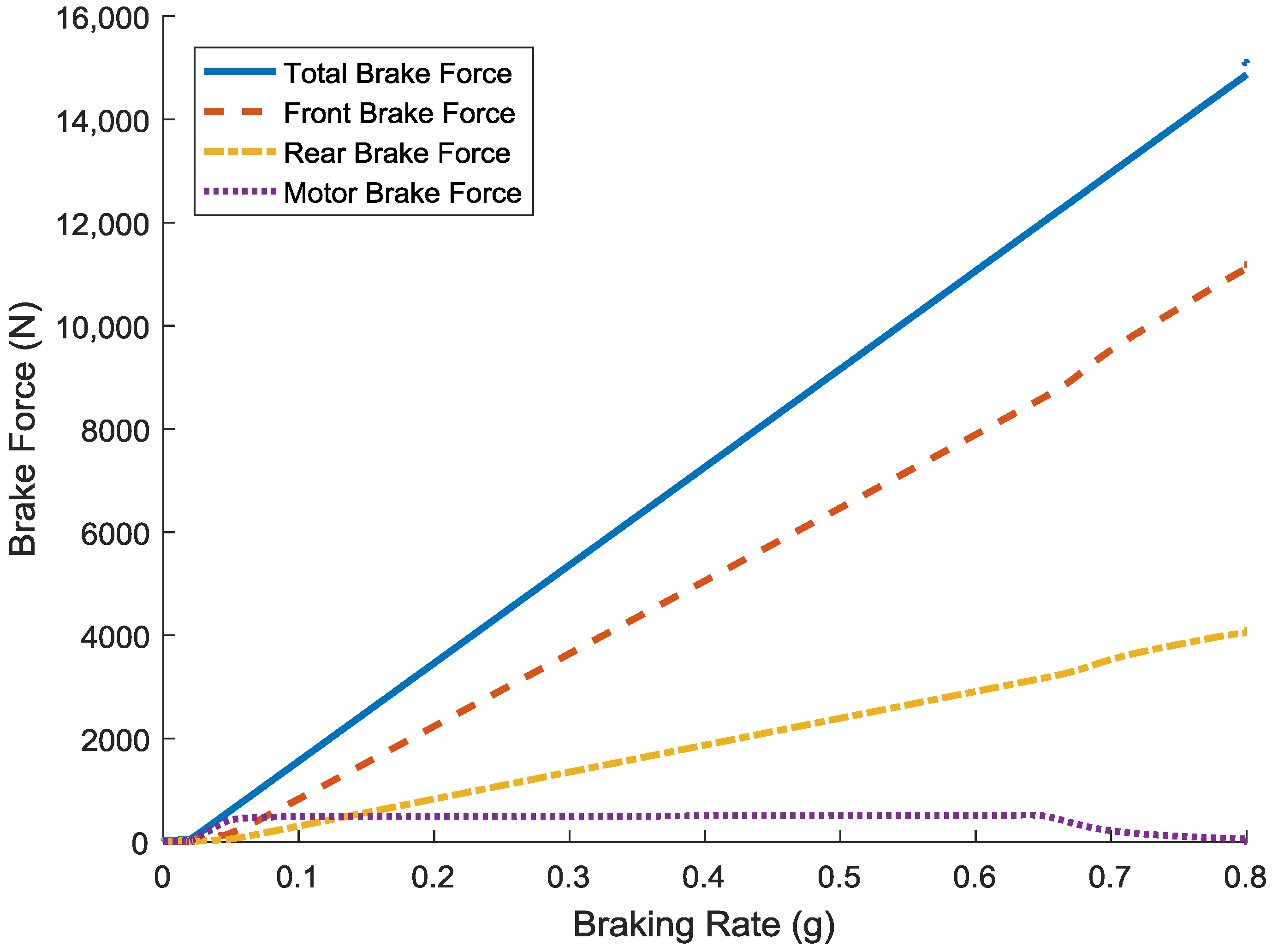
2.2.2. Brake Force Distribution Strategy in Cooperative Braking Mode
2.2.3. Pressure Control Method of the Hydraulic Braking System
3. Simulation Platform and System Components Modeling
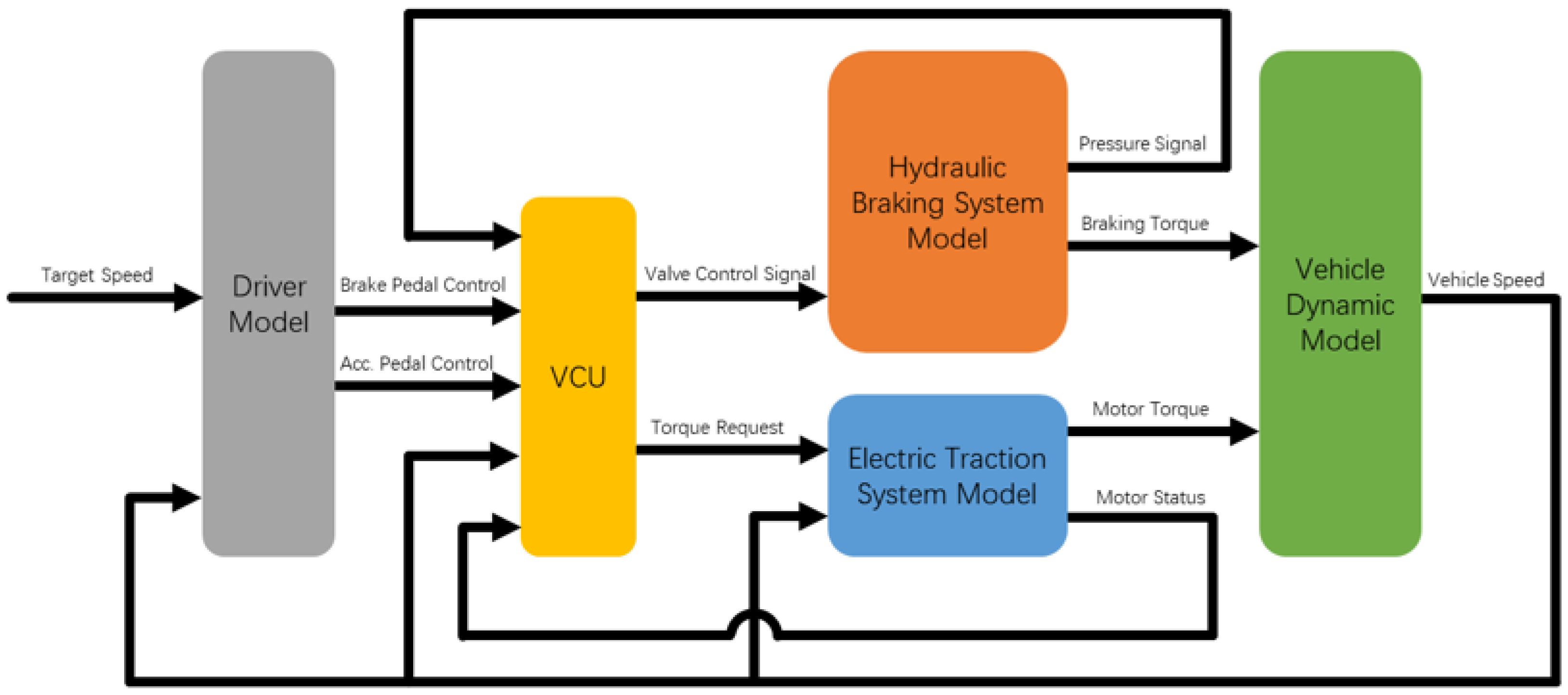
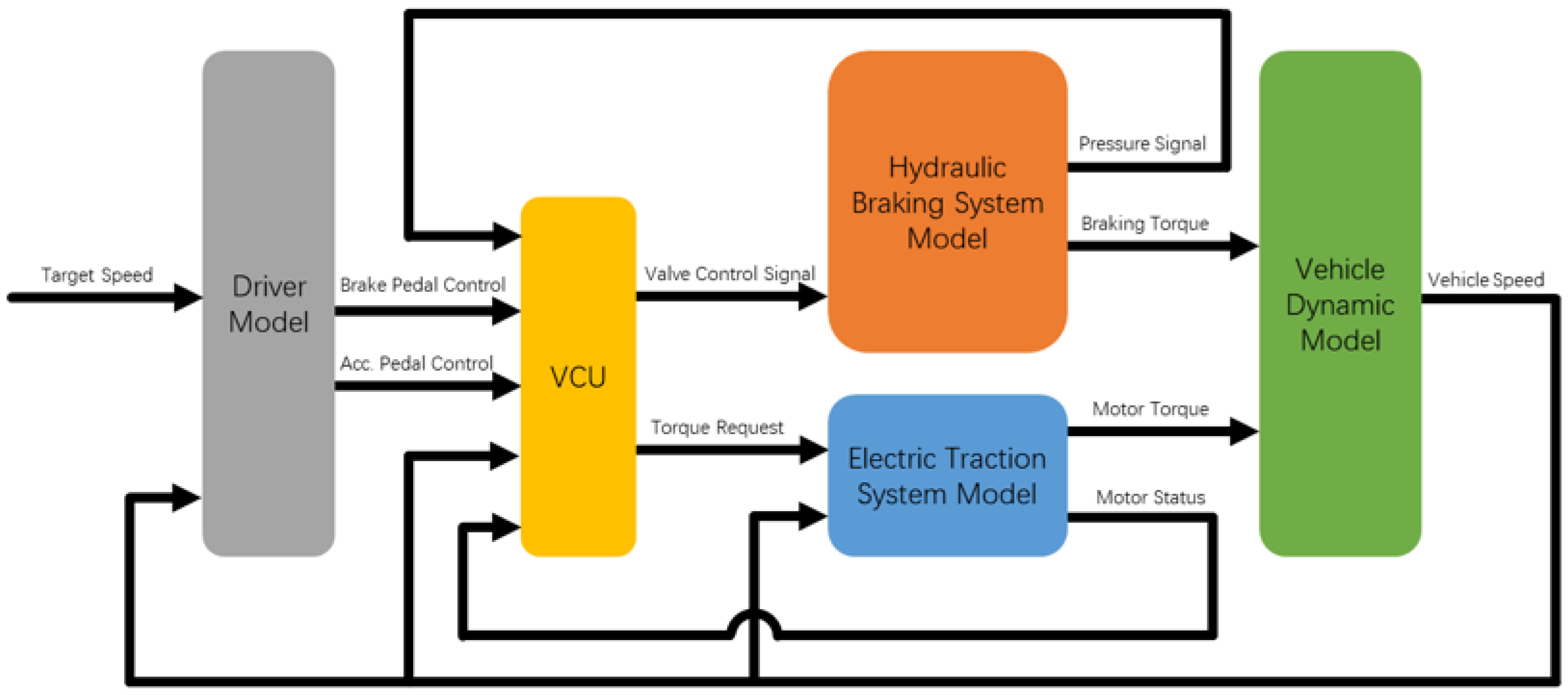
3.1. Structure of the Simulation Platform
3.2. Vehicle Dynamic Modeling
3.2.1. Tire Modeling
3.2.2. Wheel Modeling
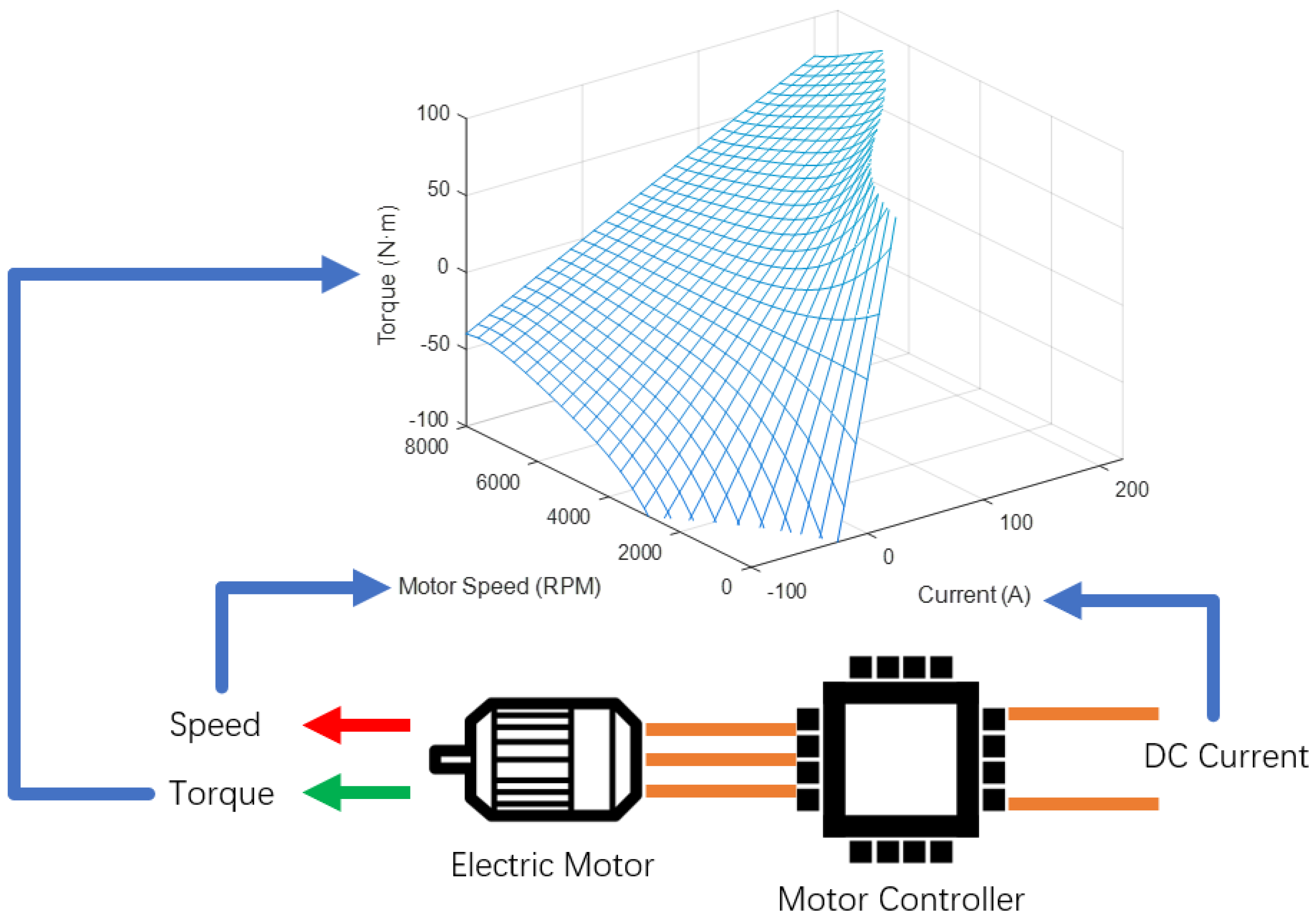
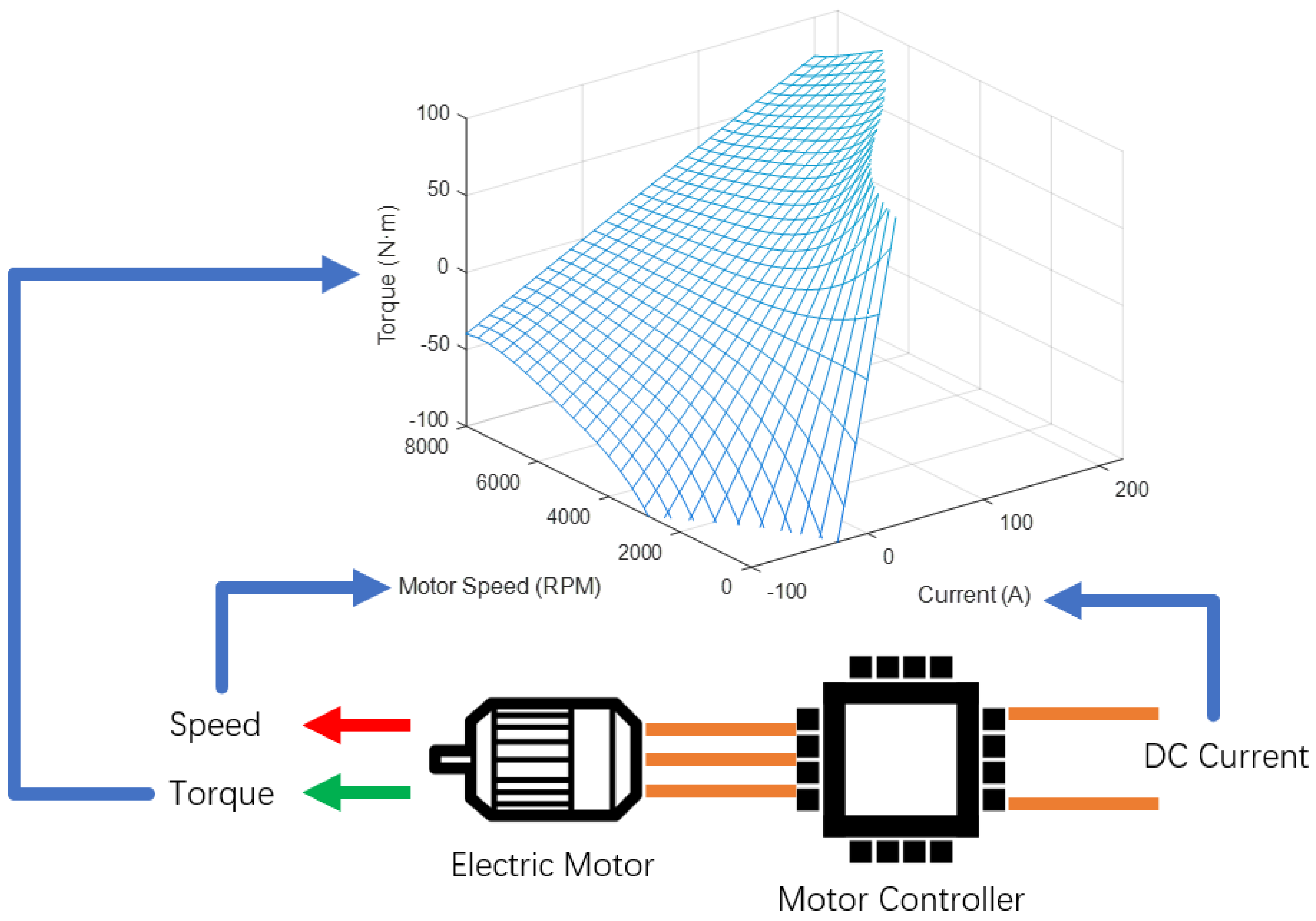
3.3. Traction System Modeling
3.4. Battery Modeling
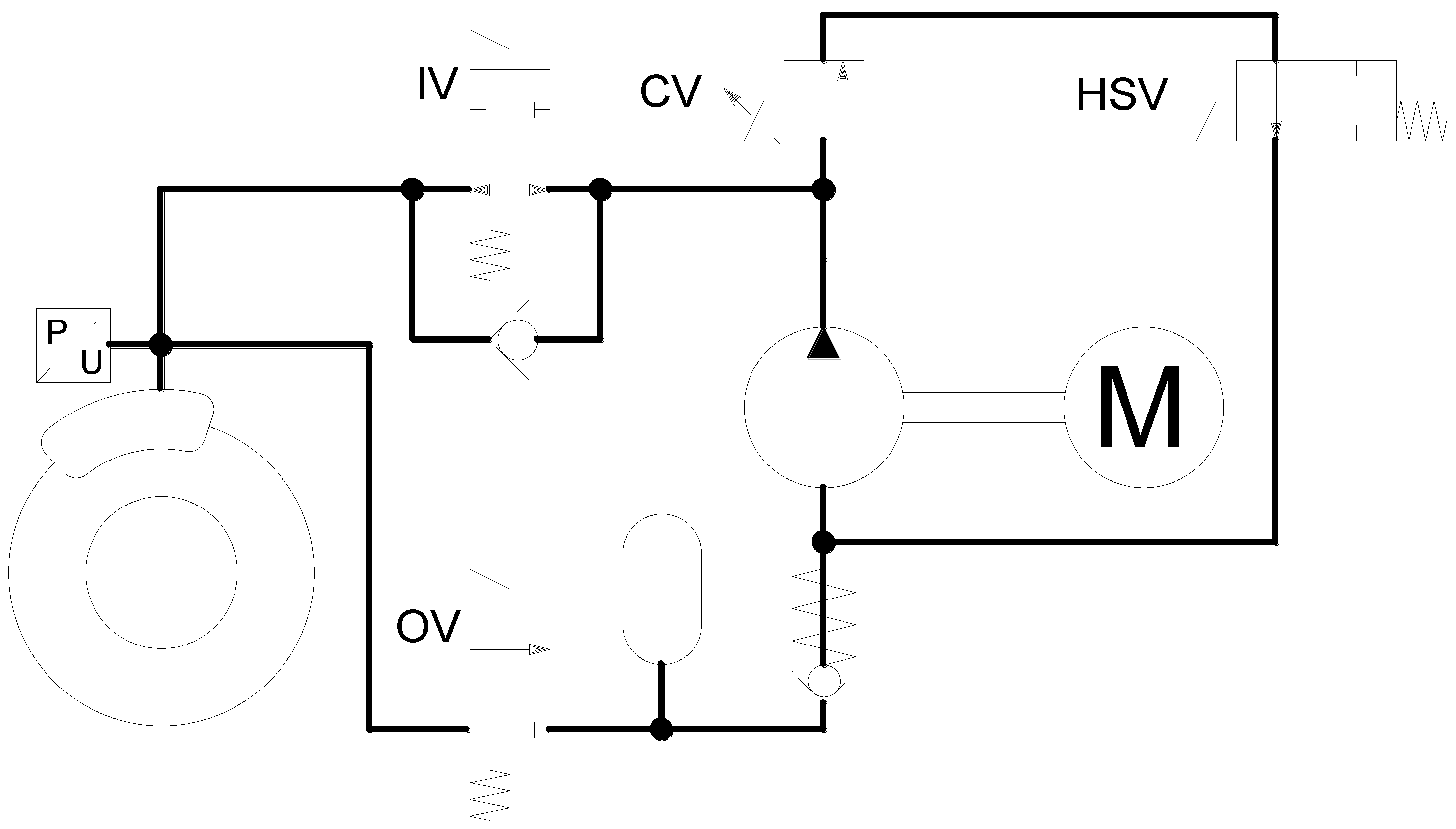
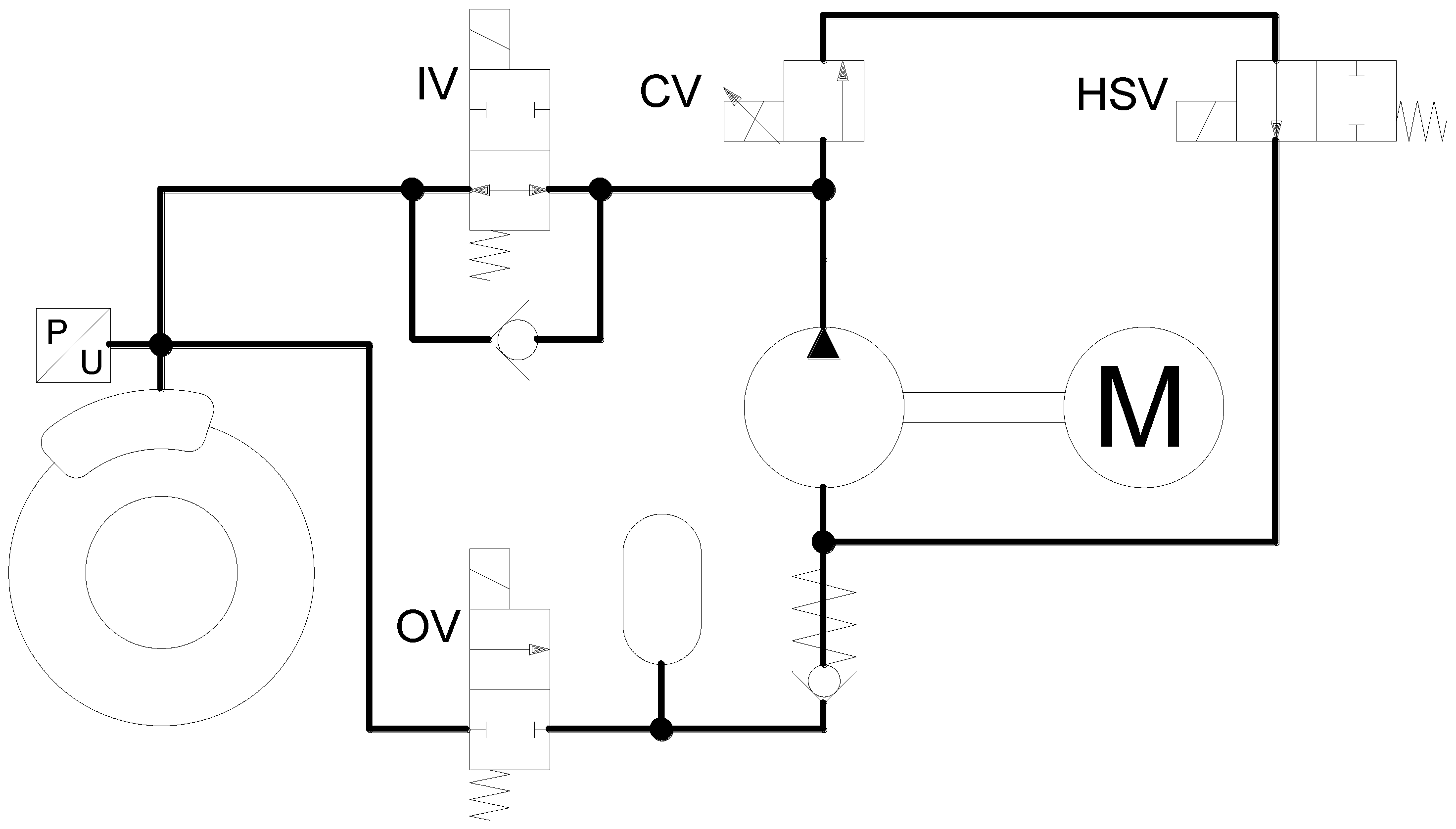
3.5. Hydraulic Braking System Modeling
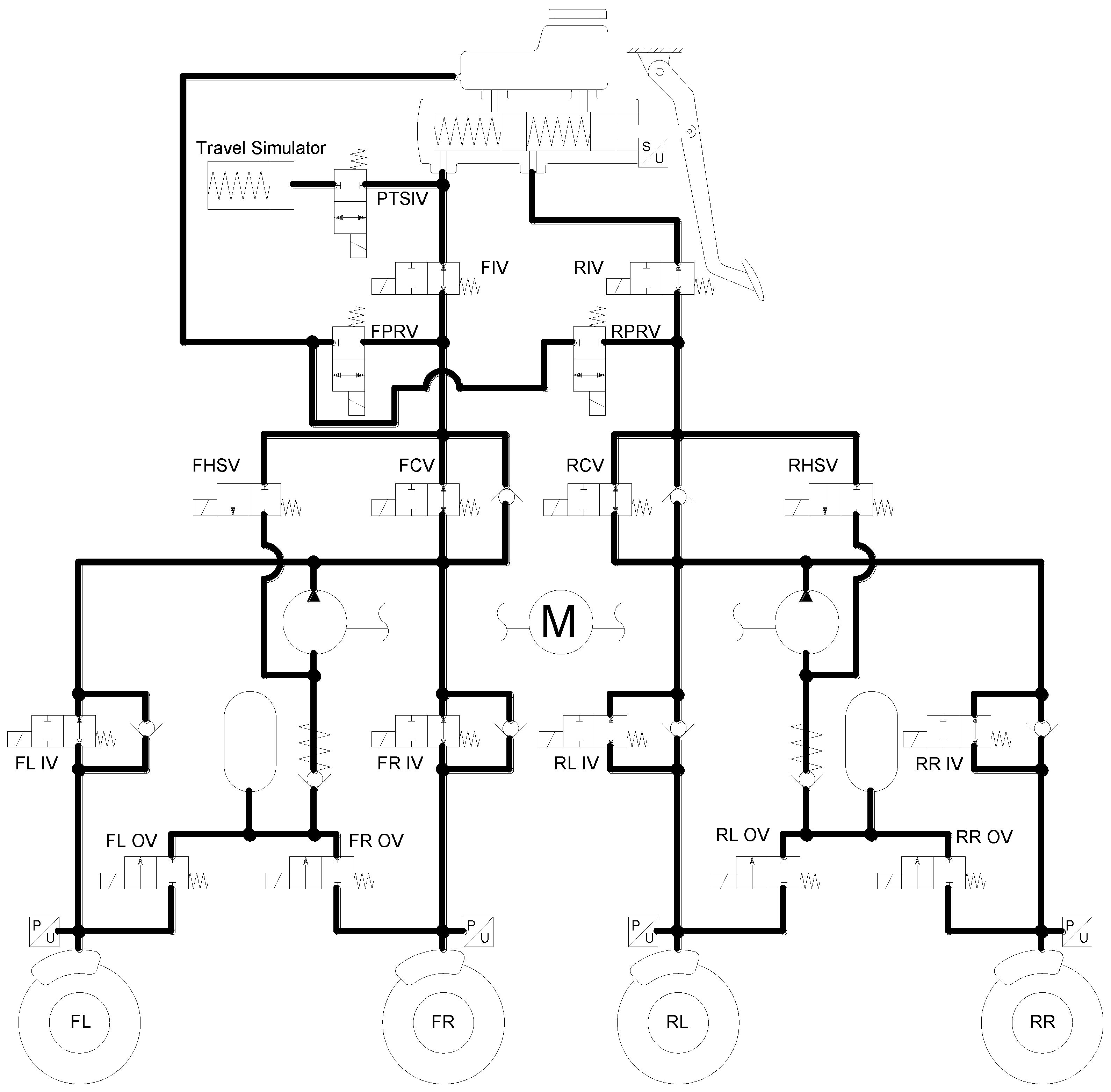
3.5.1. Hydraulic Control Unit Modeling
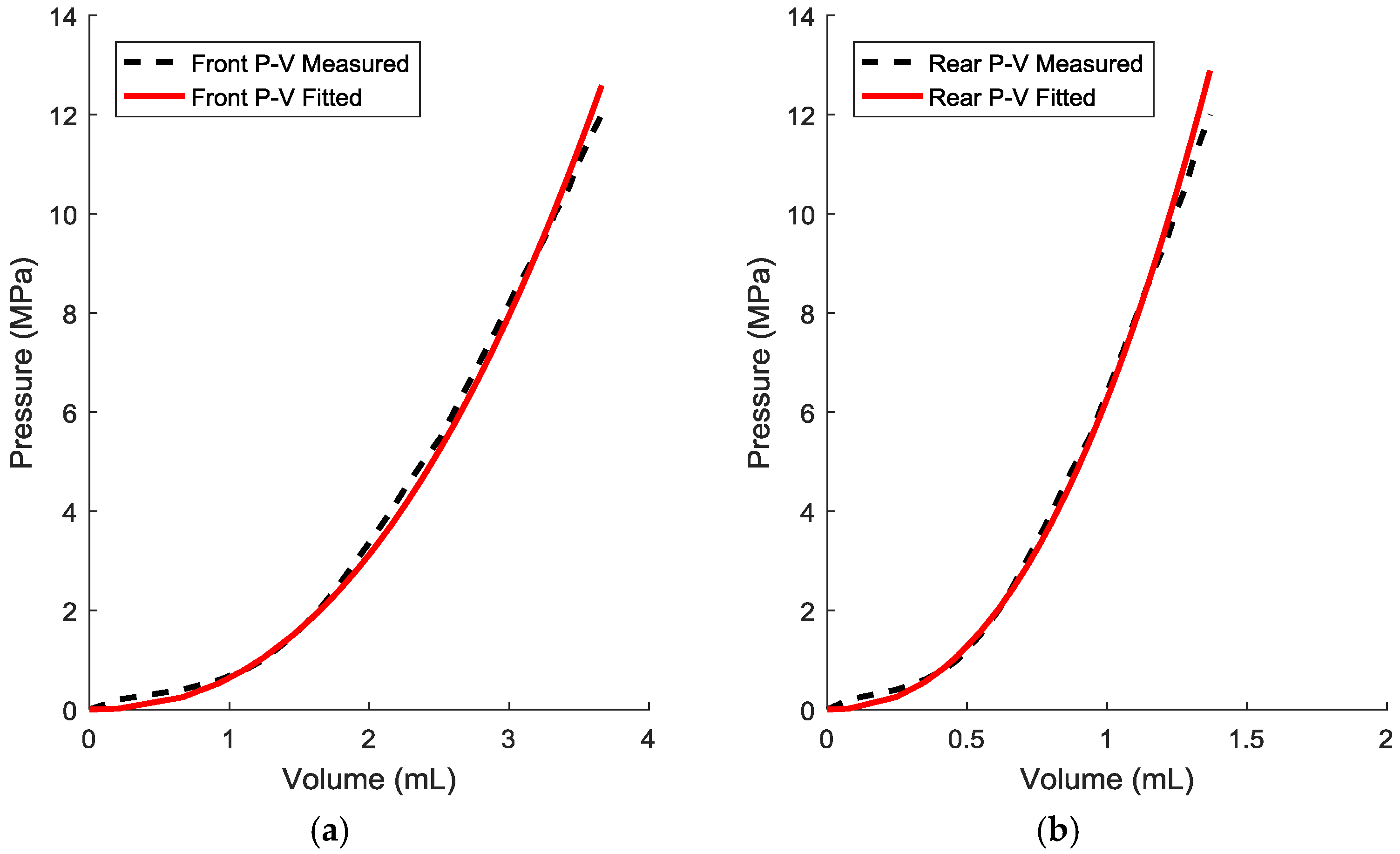
3.5.2. Brake Caliper Modeling
3.5.3. Master Cylinder and Pedal Assembly Modeling
3.5.4. Brake Pedal Travel Simulator Modeling
4. Verification and Analysis of the System in Simulation Environment
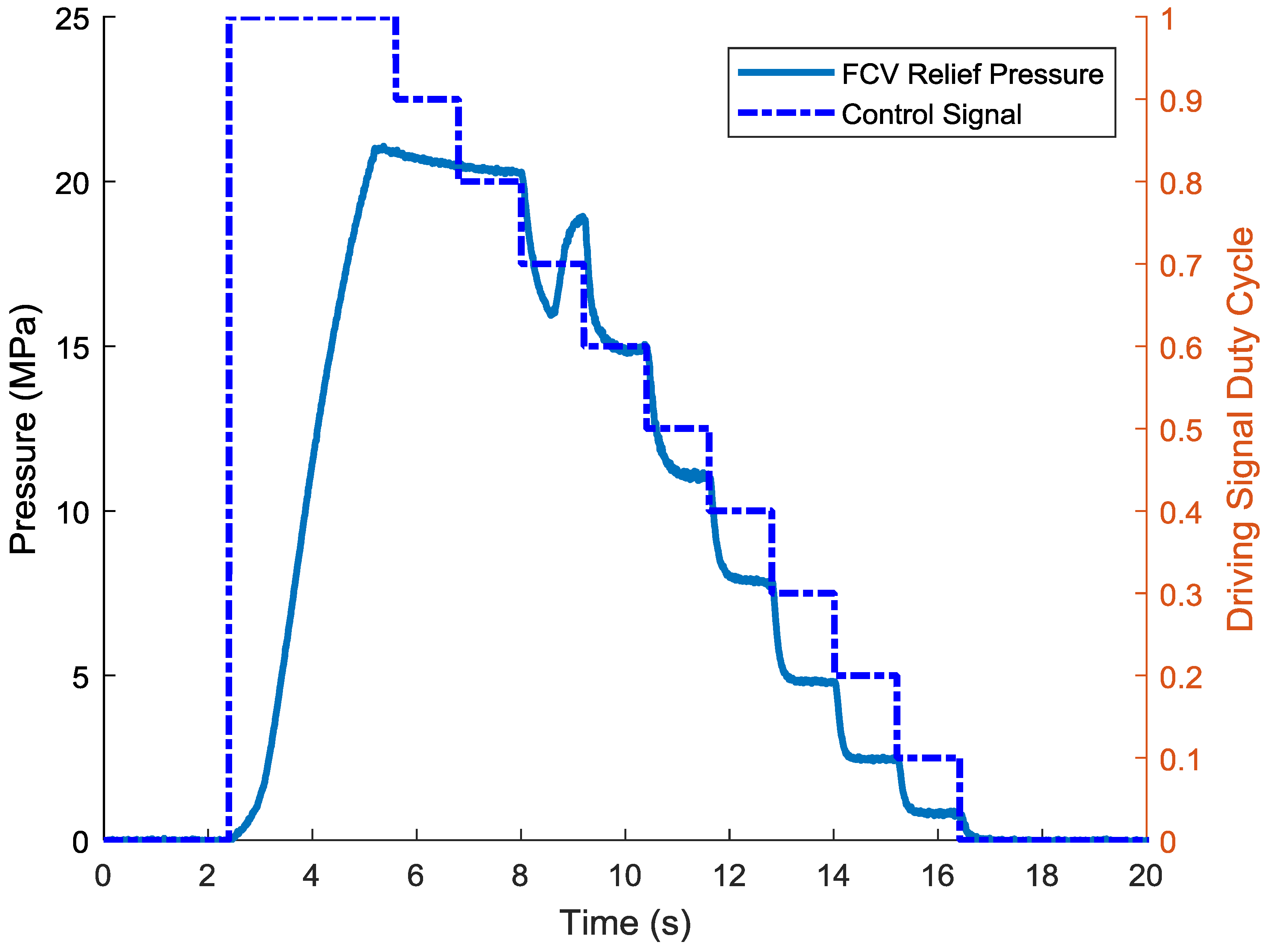
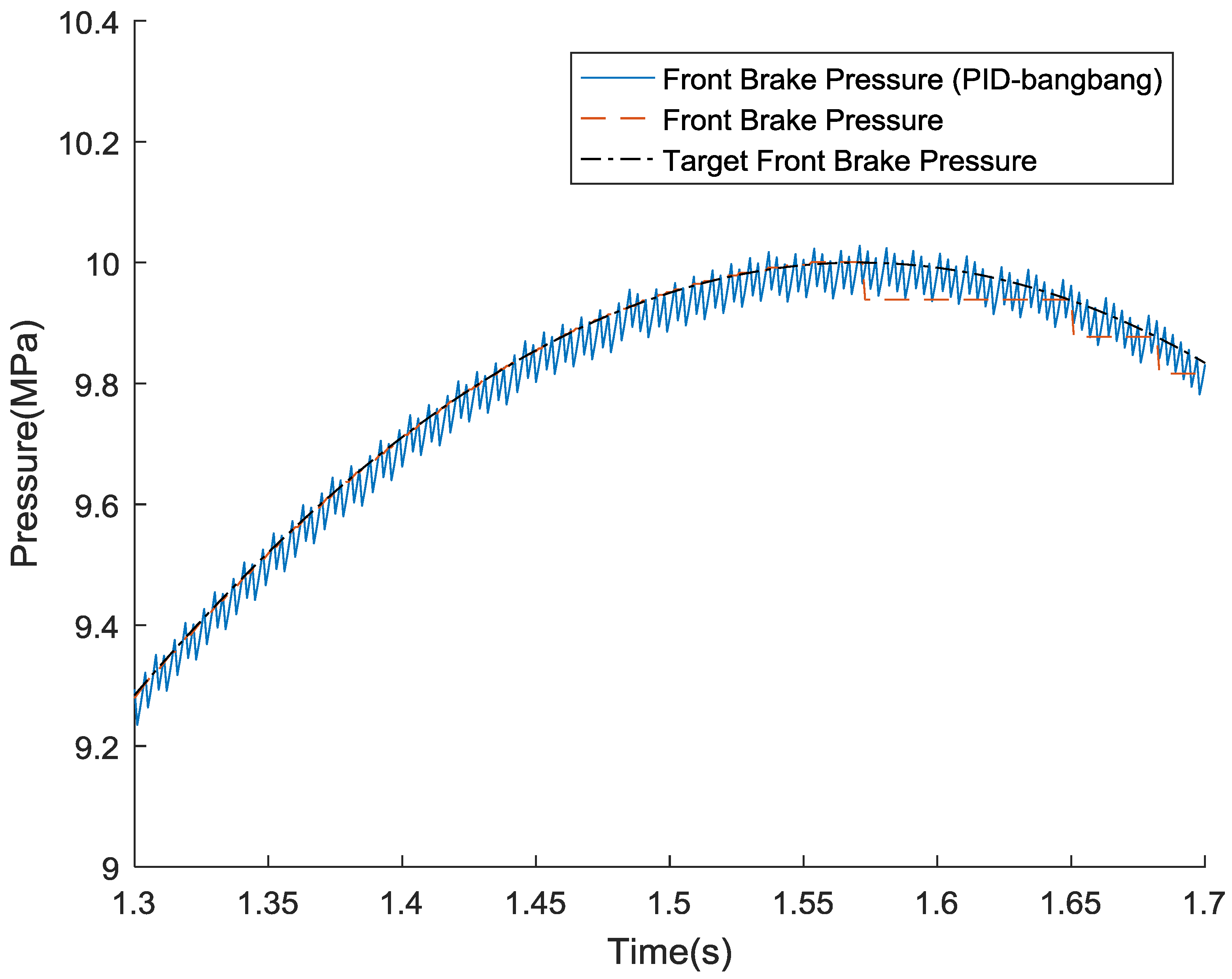
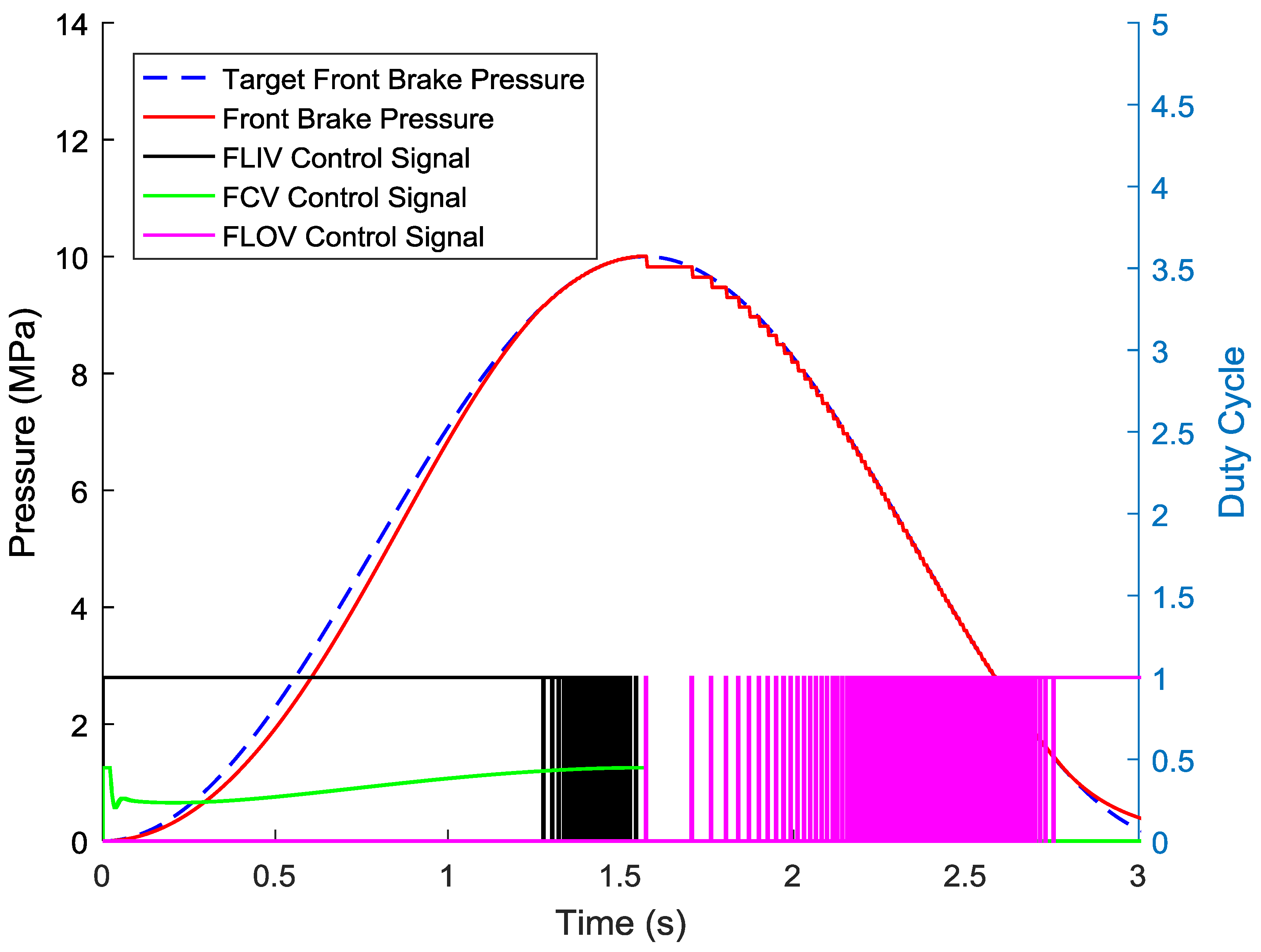
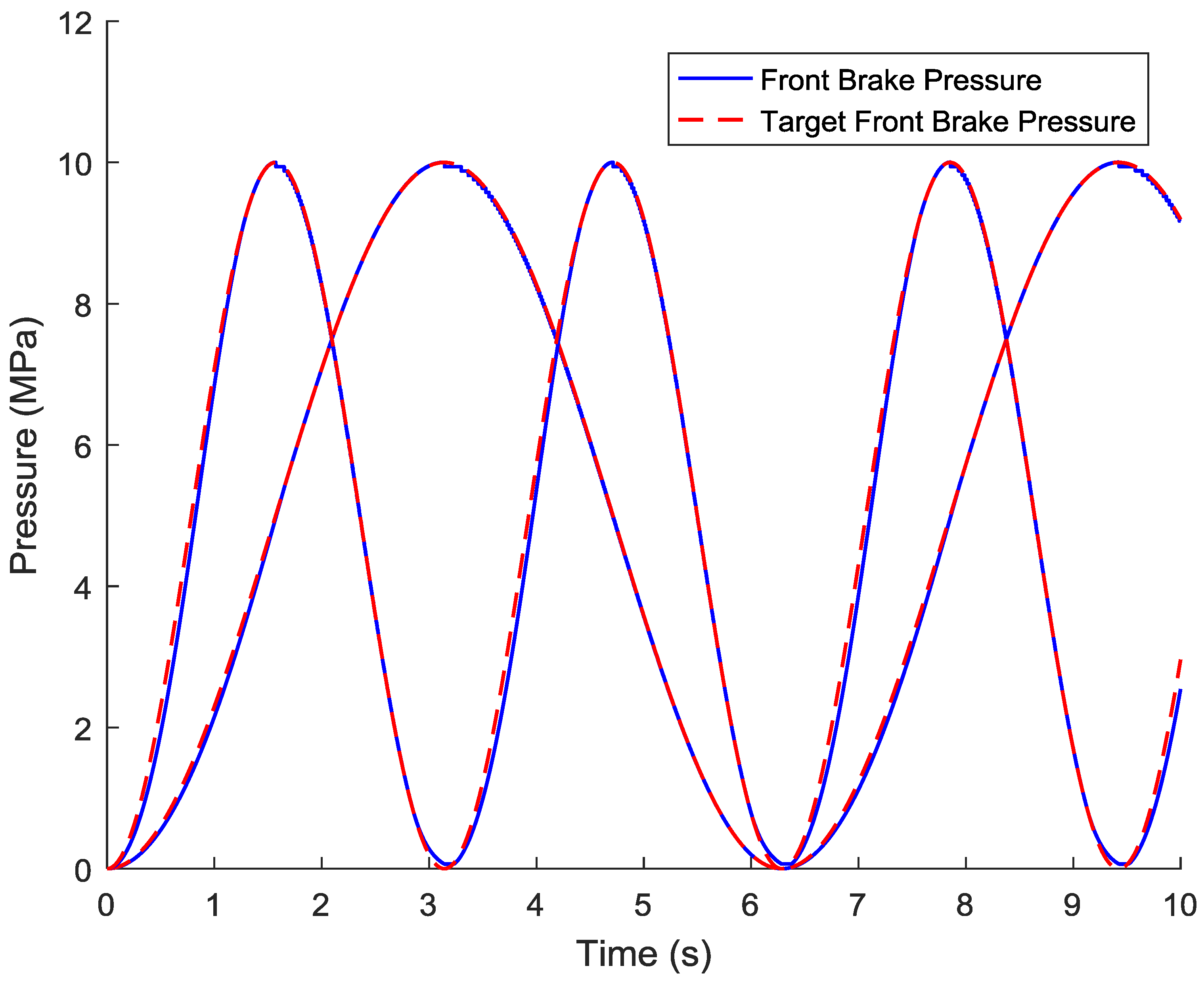
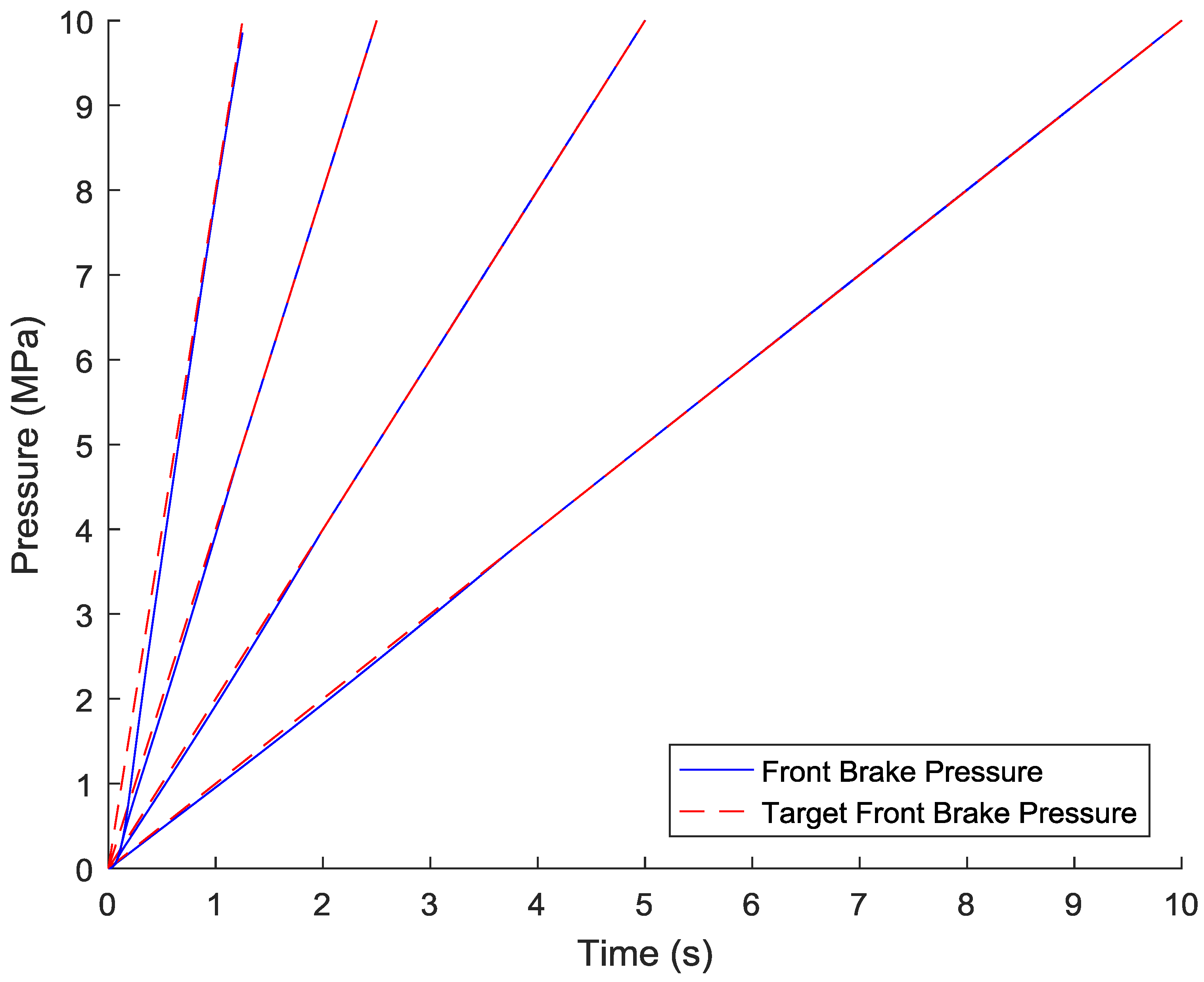
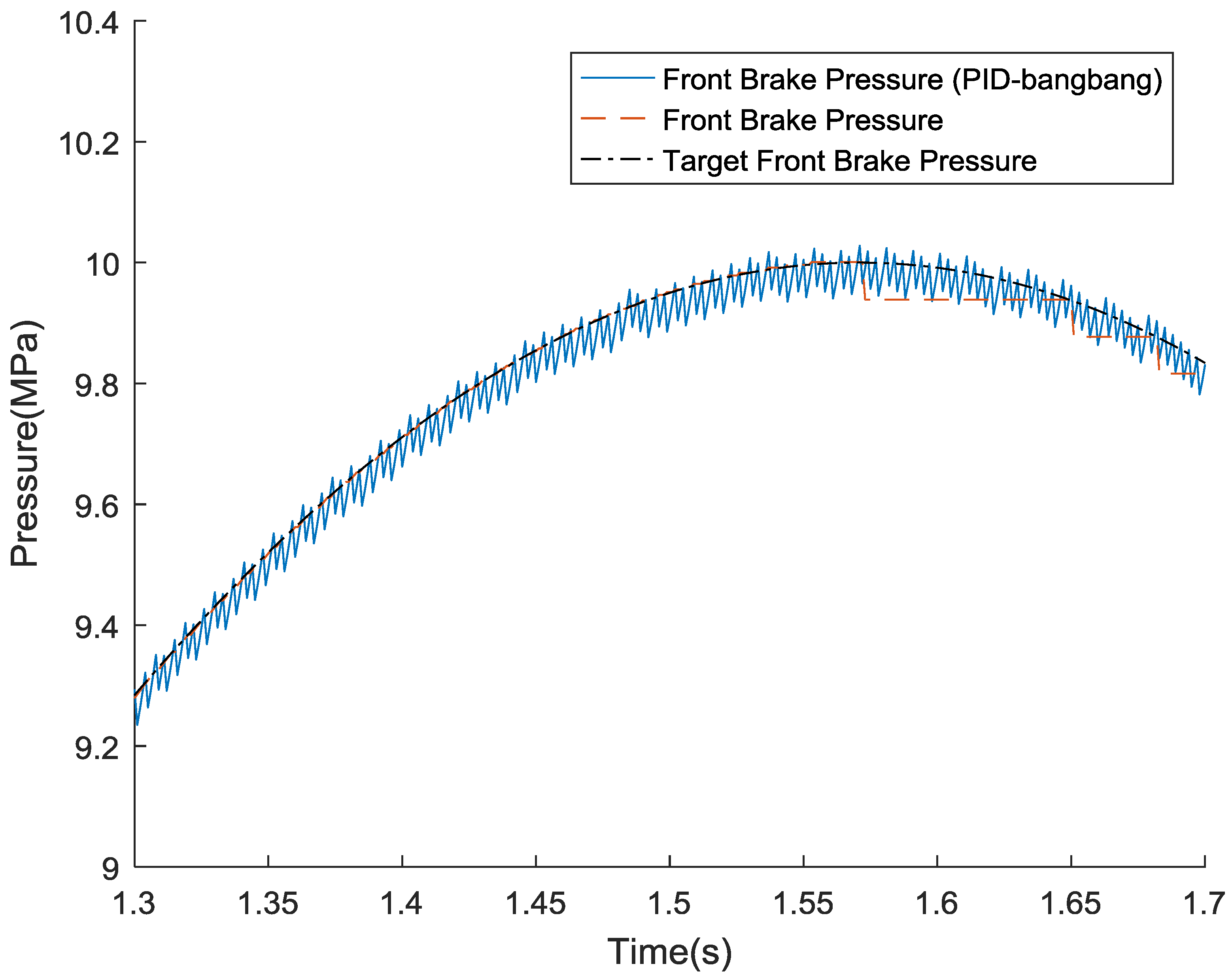
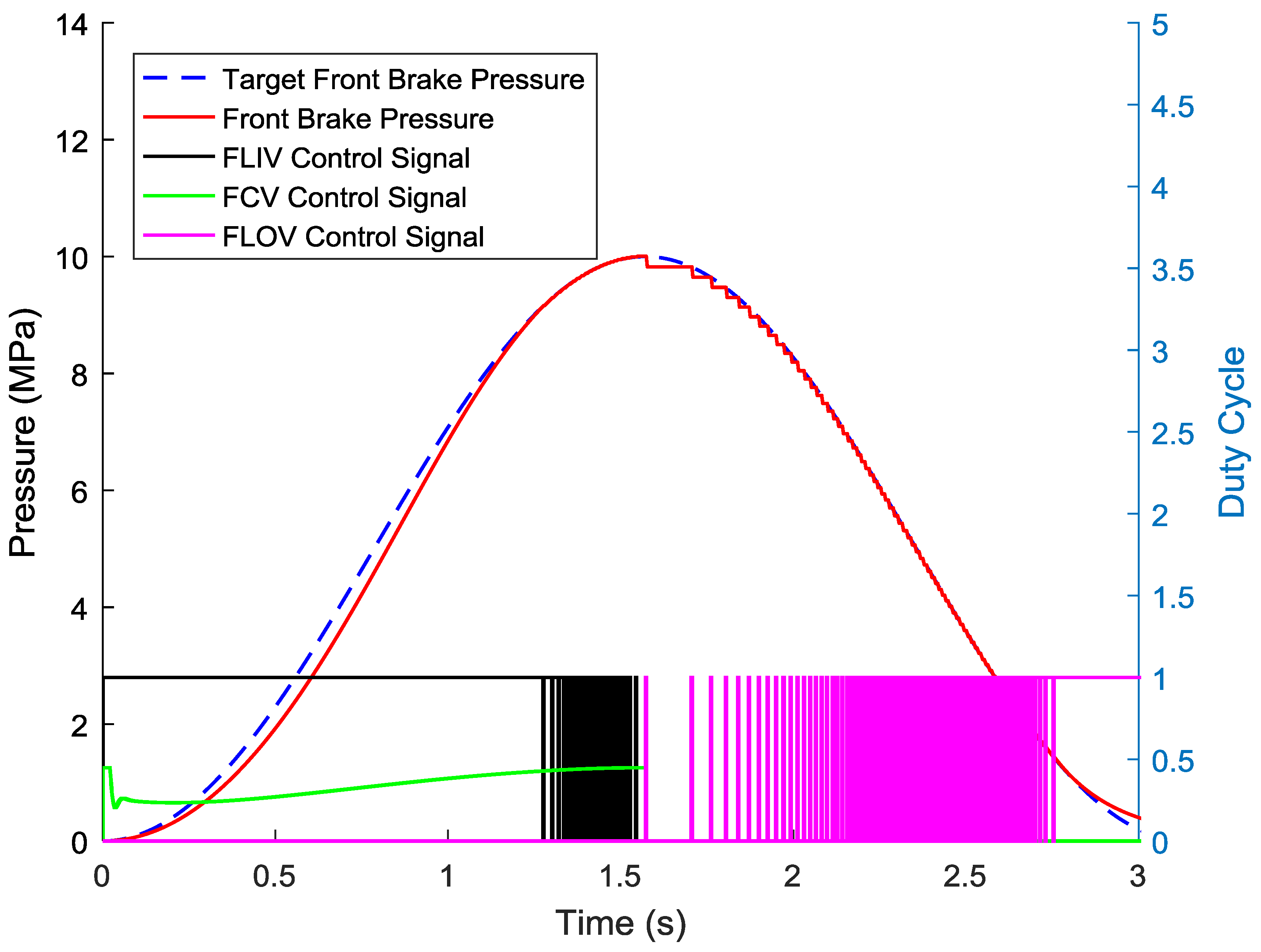
4.1. Simulation and Analysis of Wheel Cylinder Pressure Modulation Algorithm
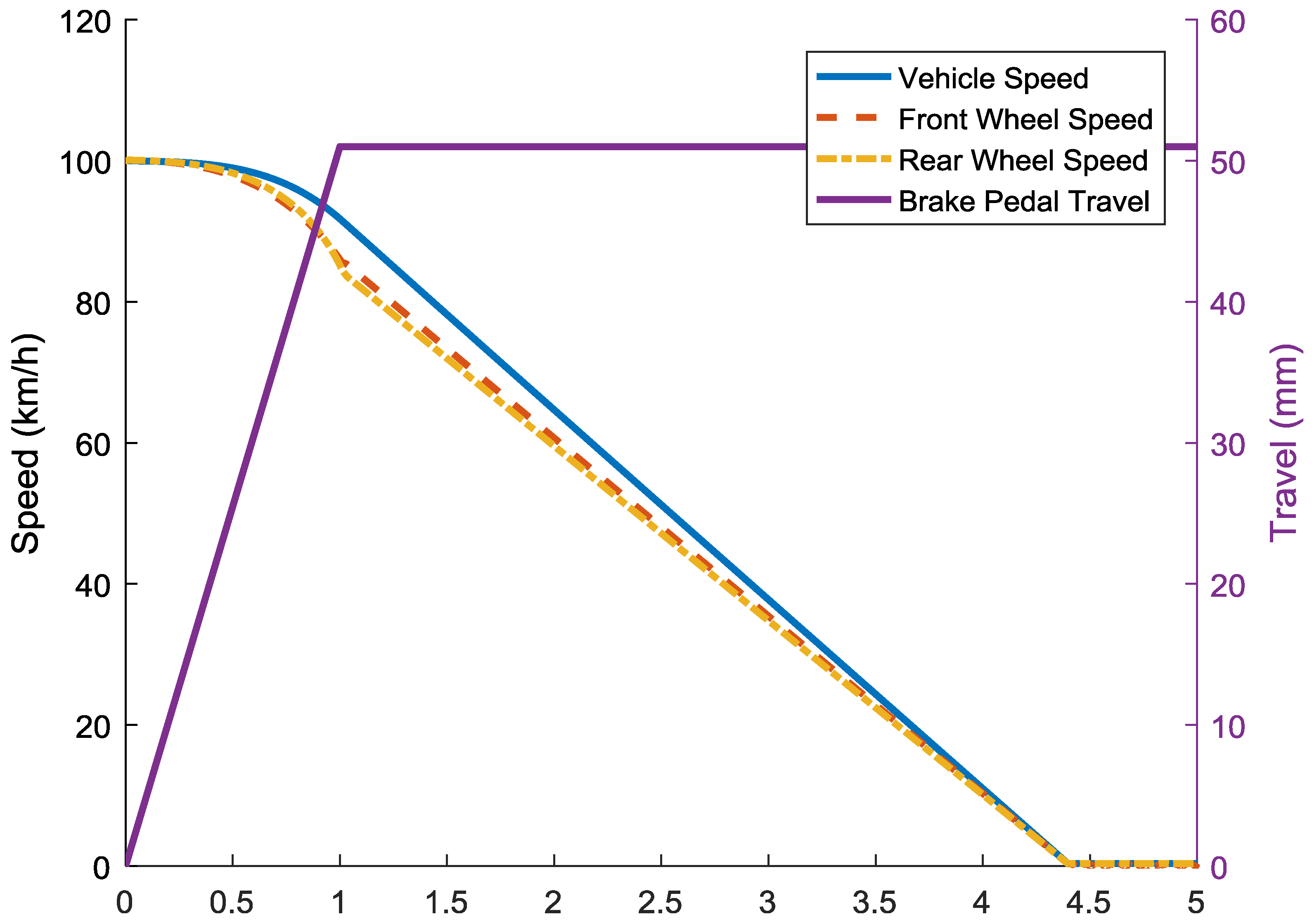
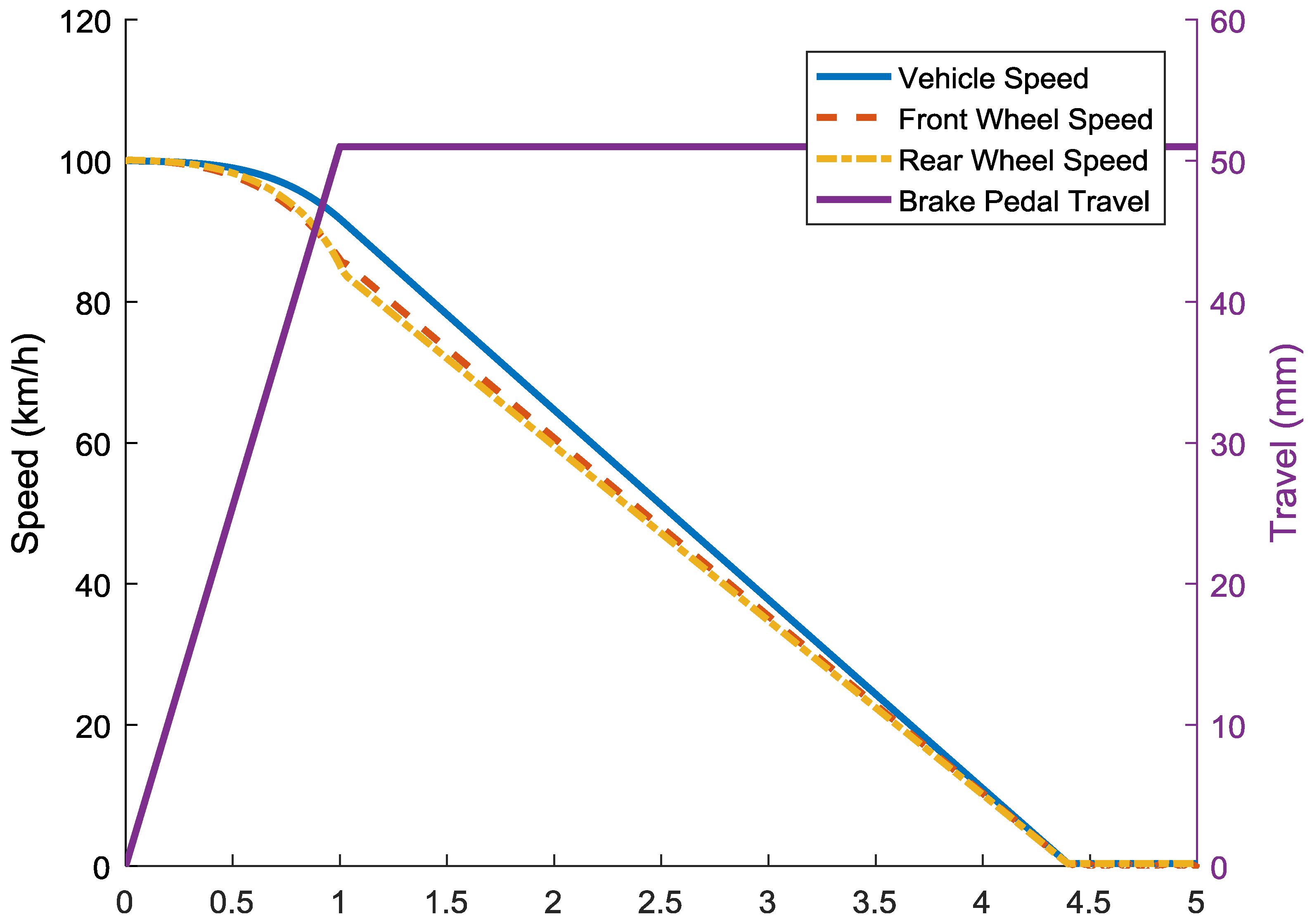
4.2. Simulation and Analysis of the System in Hydraulic Only Mode
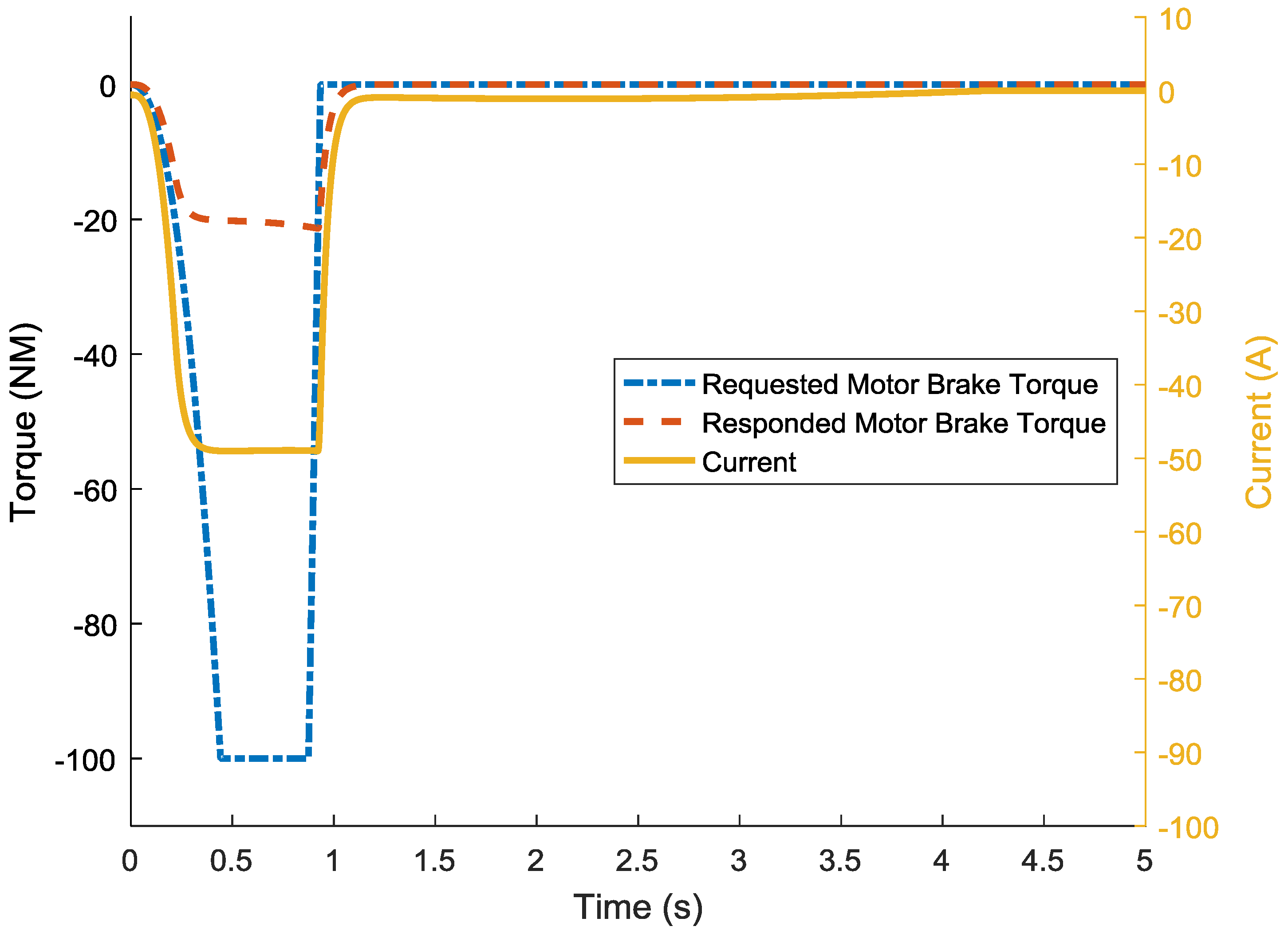
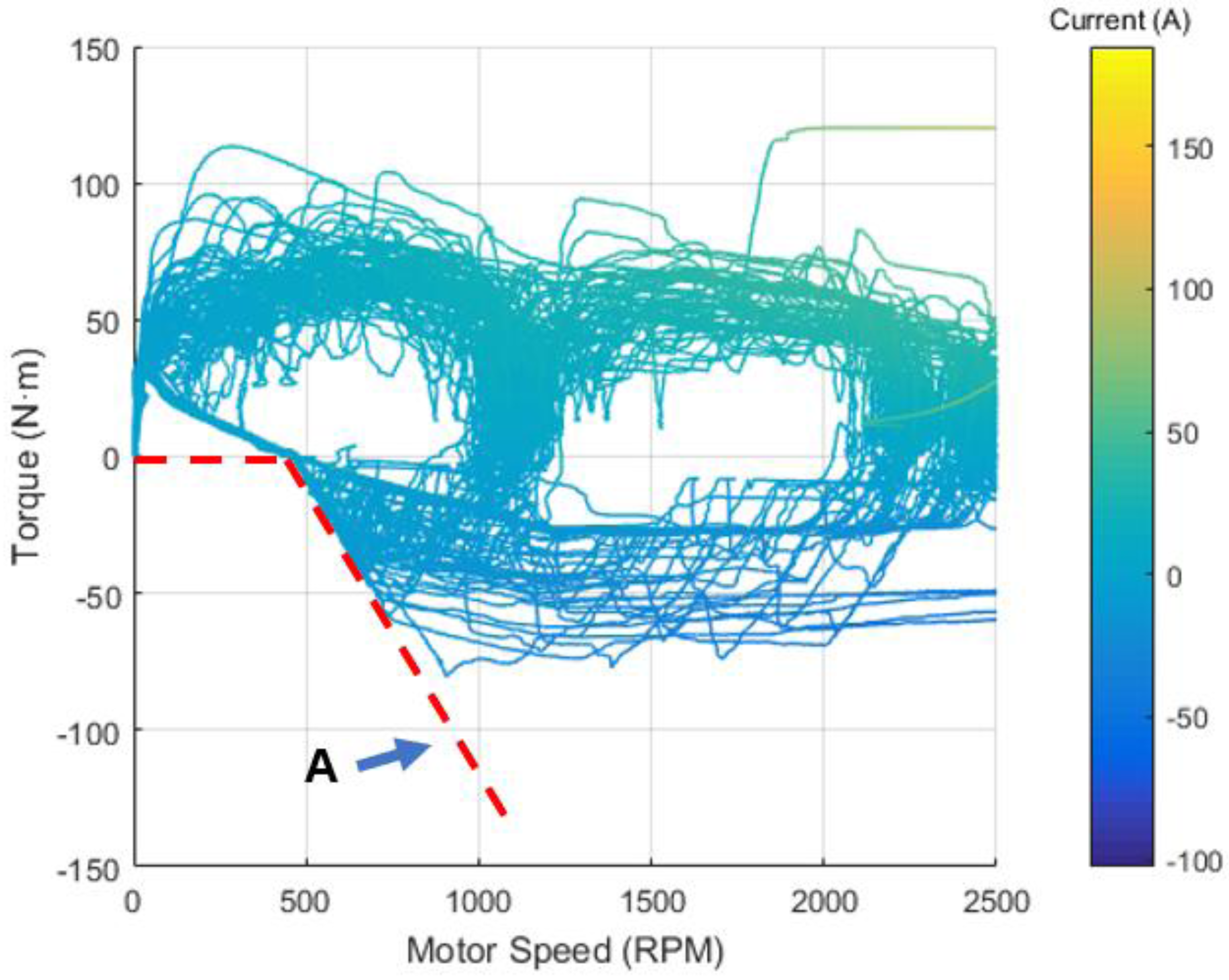
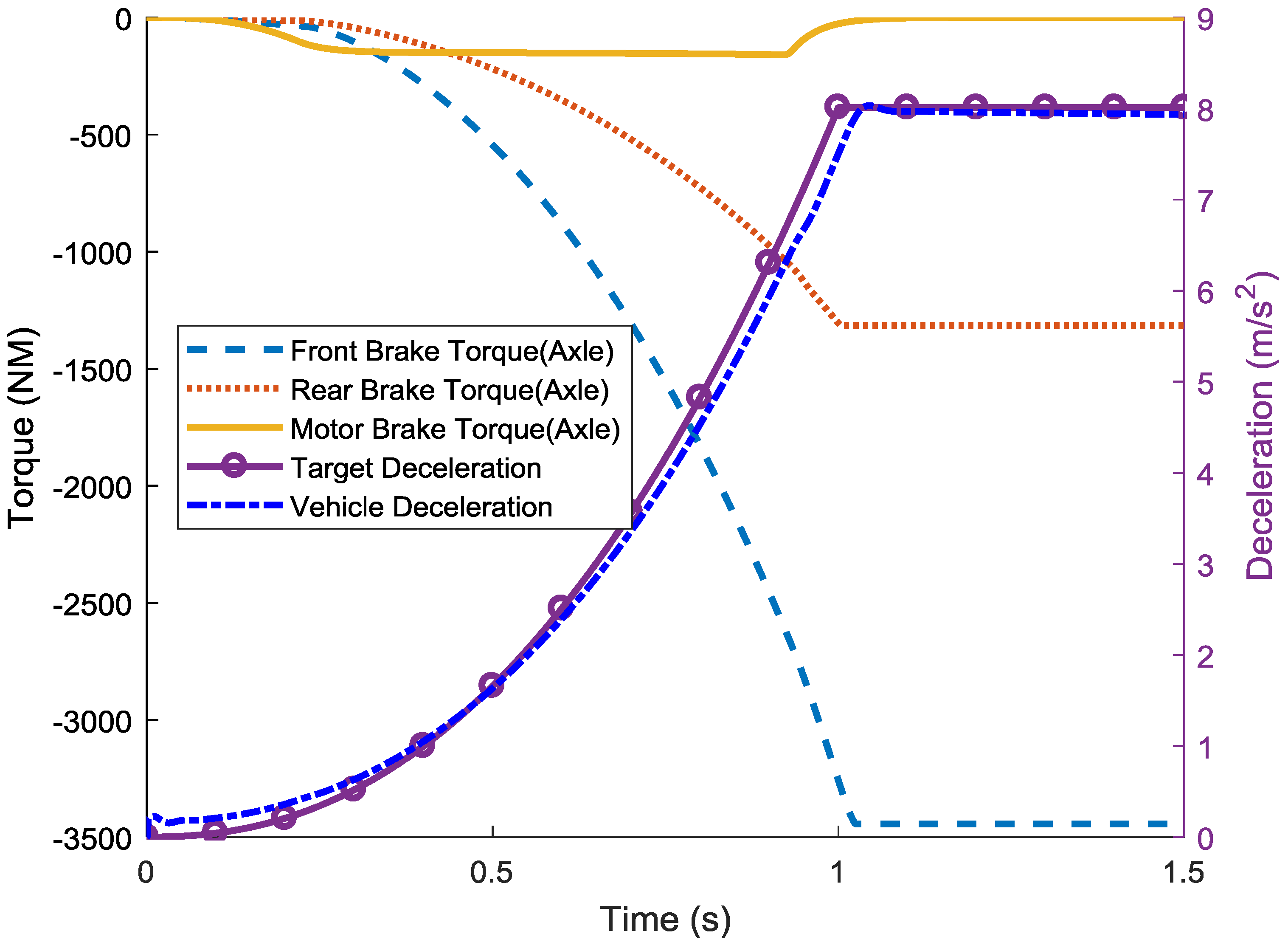
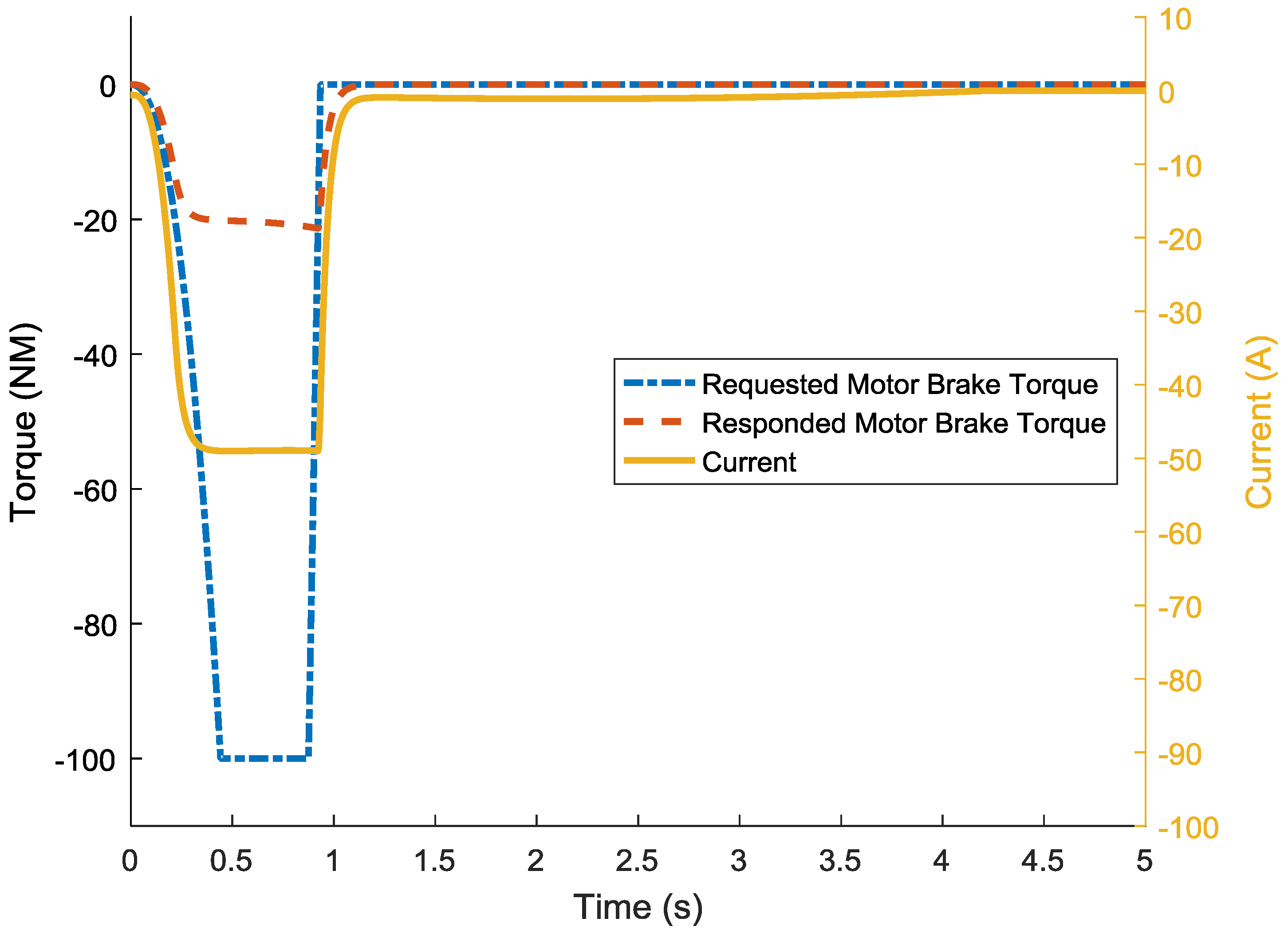
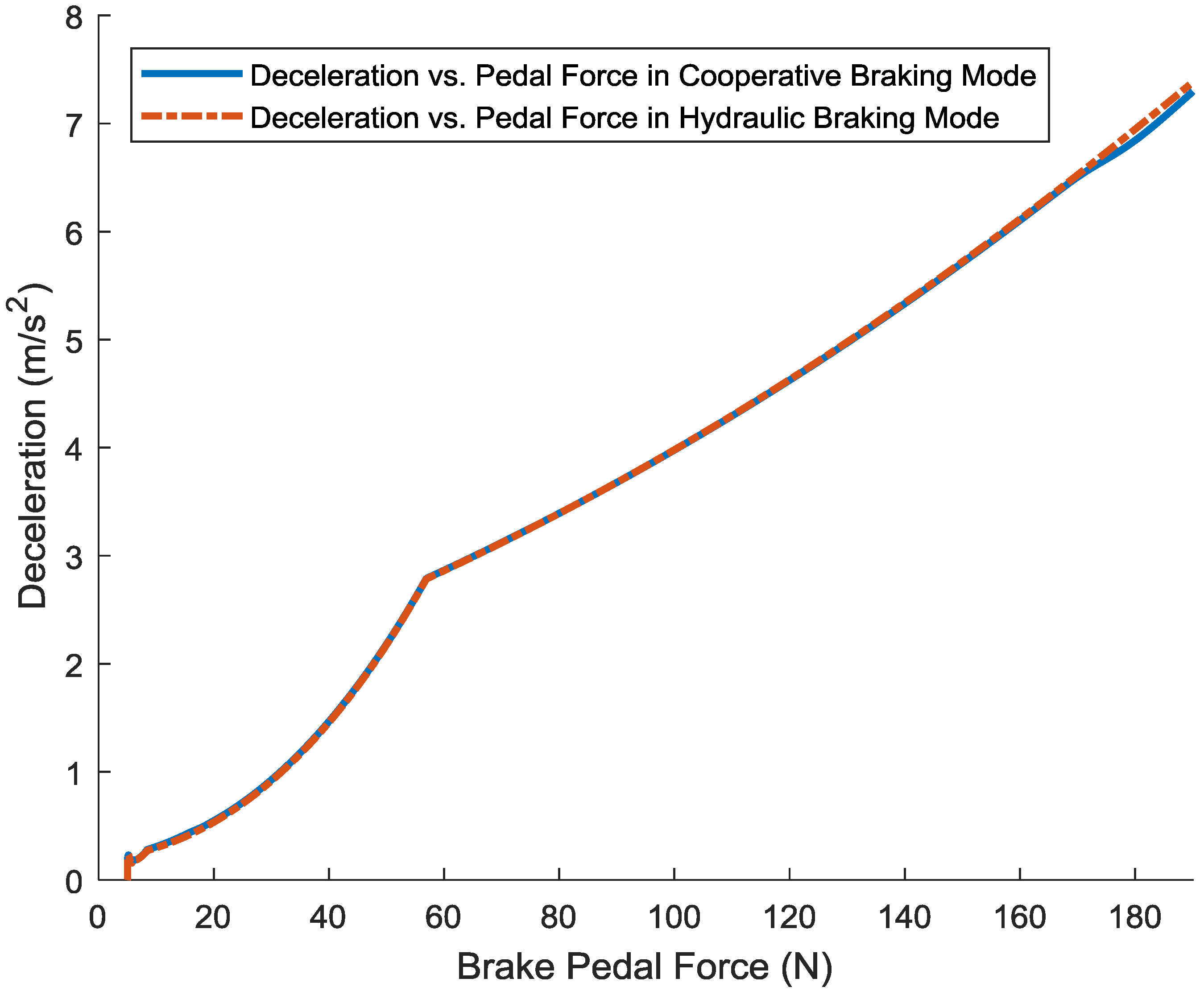
4.3. Simulation and Analysis of the System in Regenerative Braking Mode
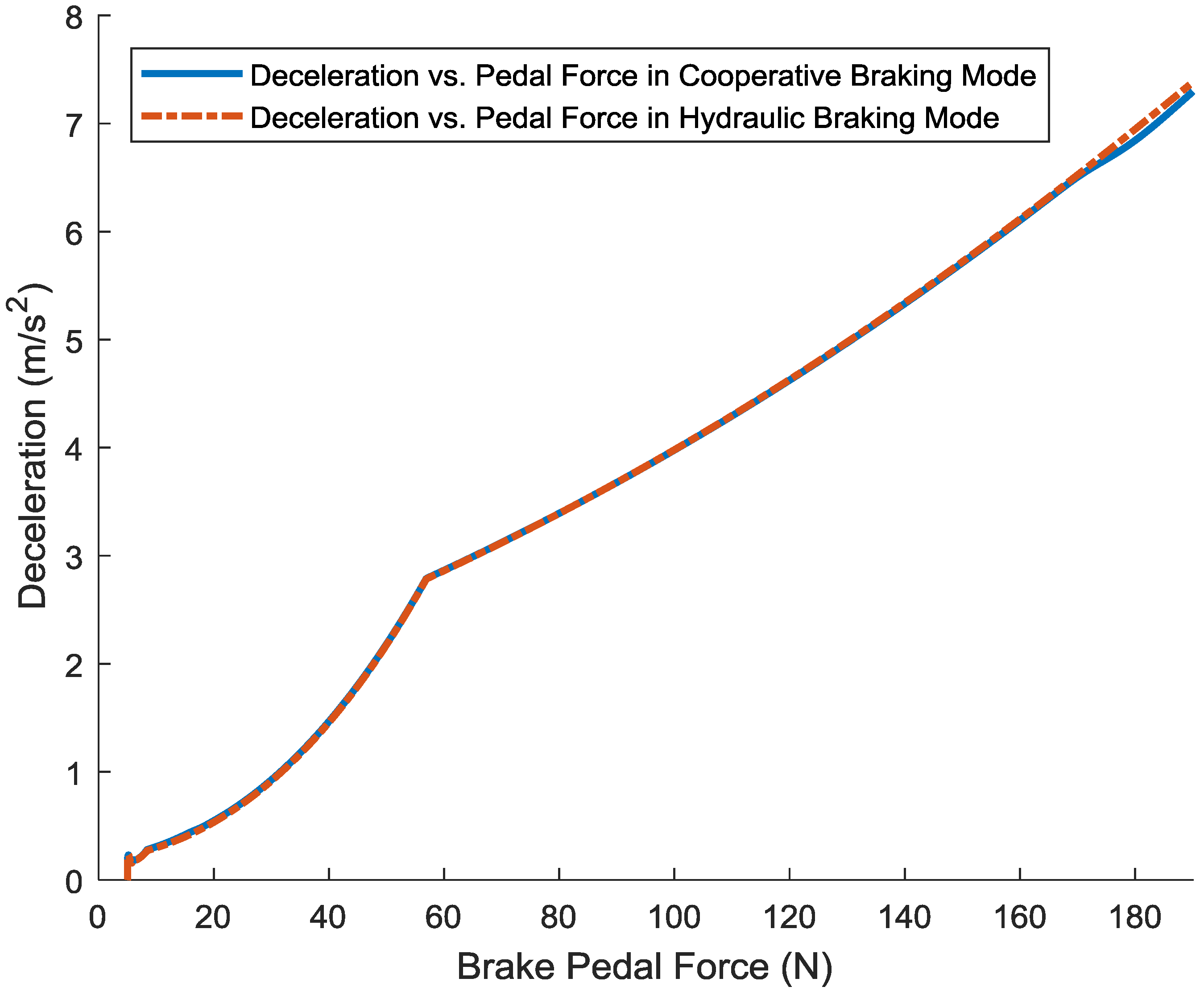
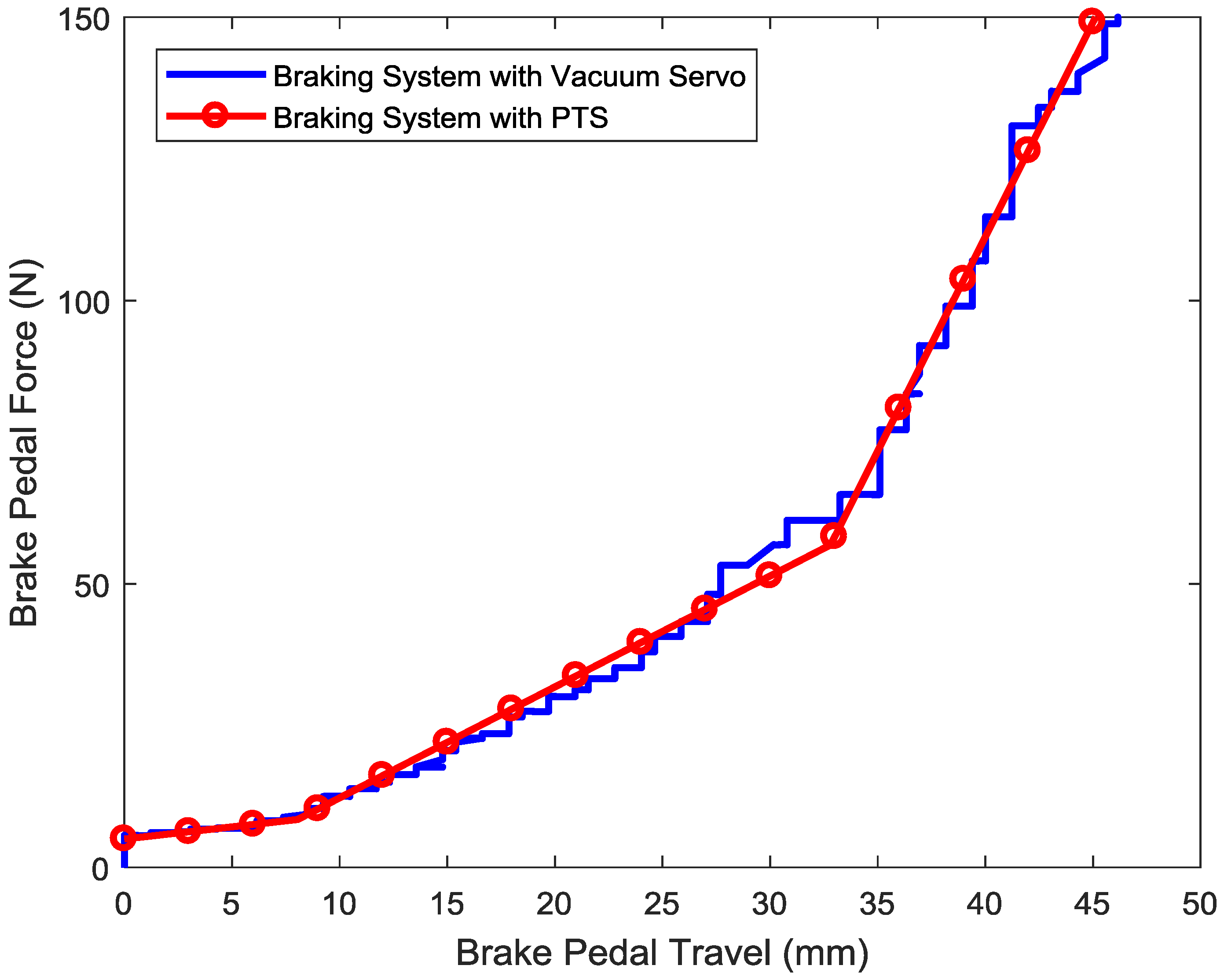
4.4. Simulation and Analysis of Brake Pedal Feel Simulation Mechanism
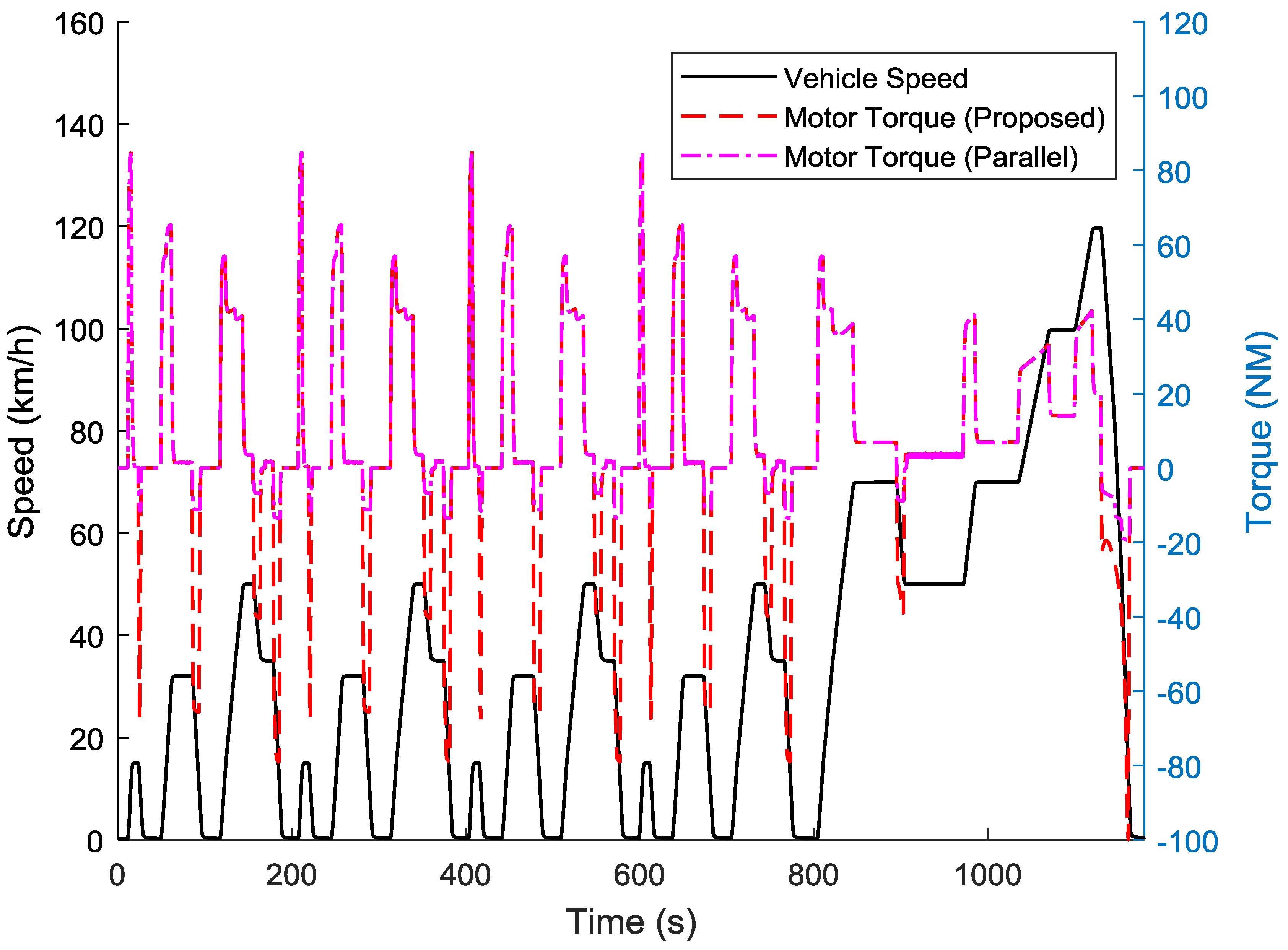
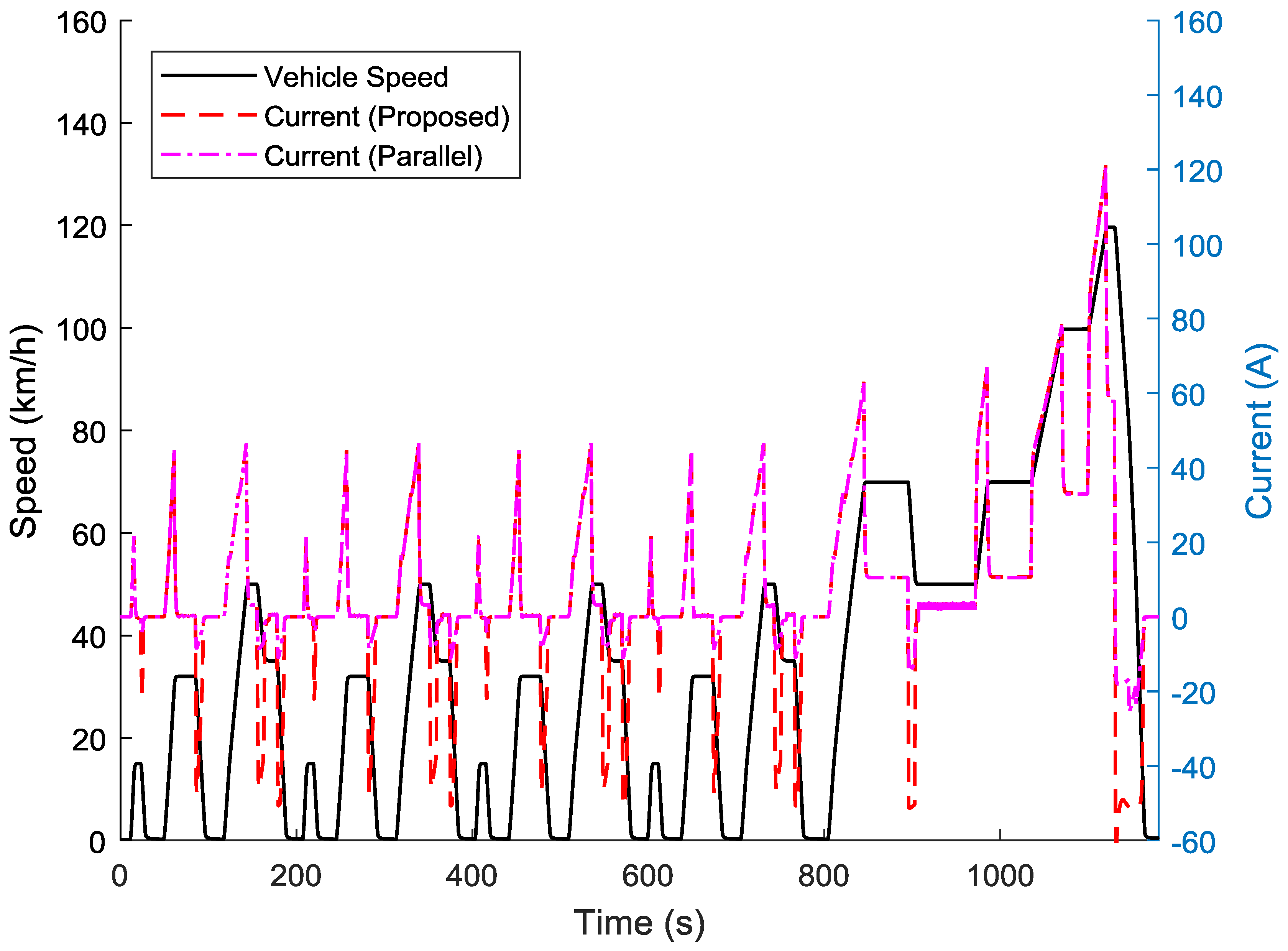
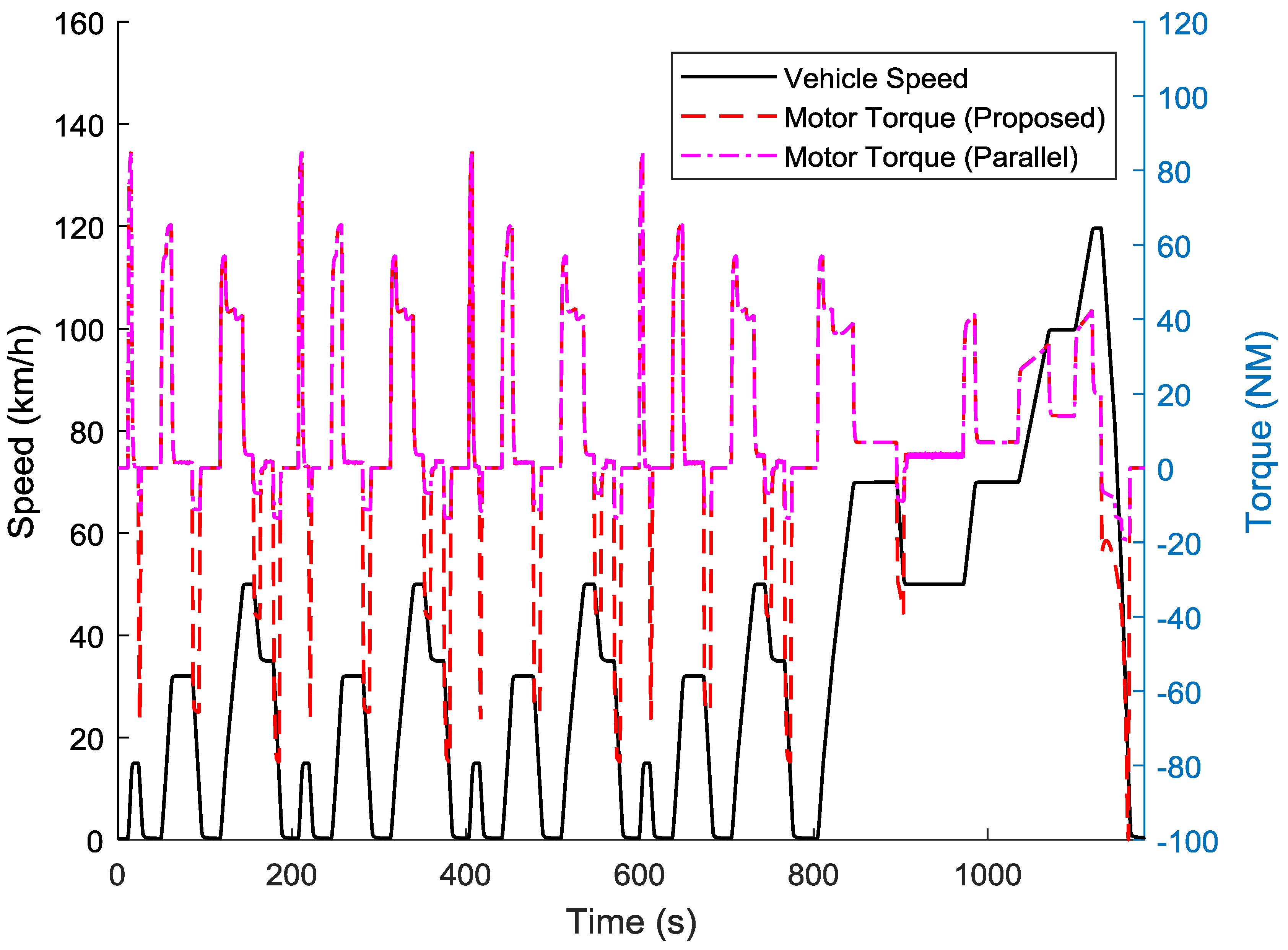
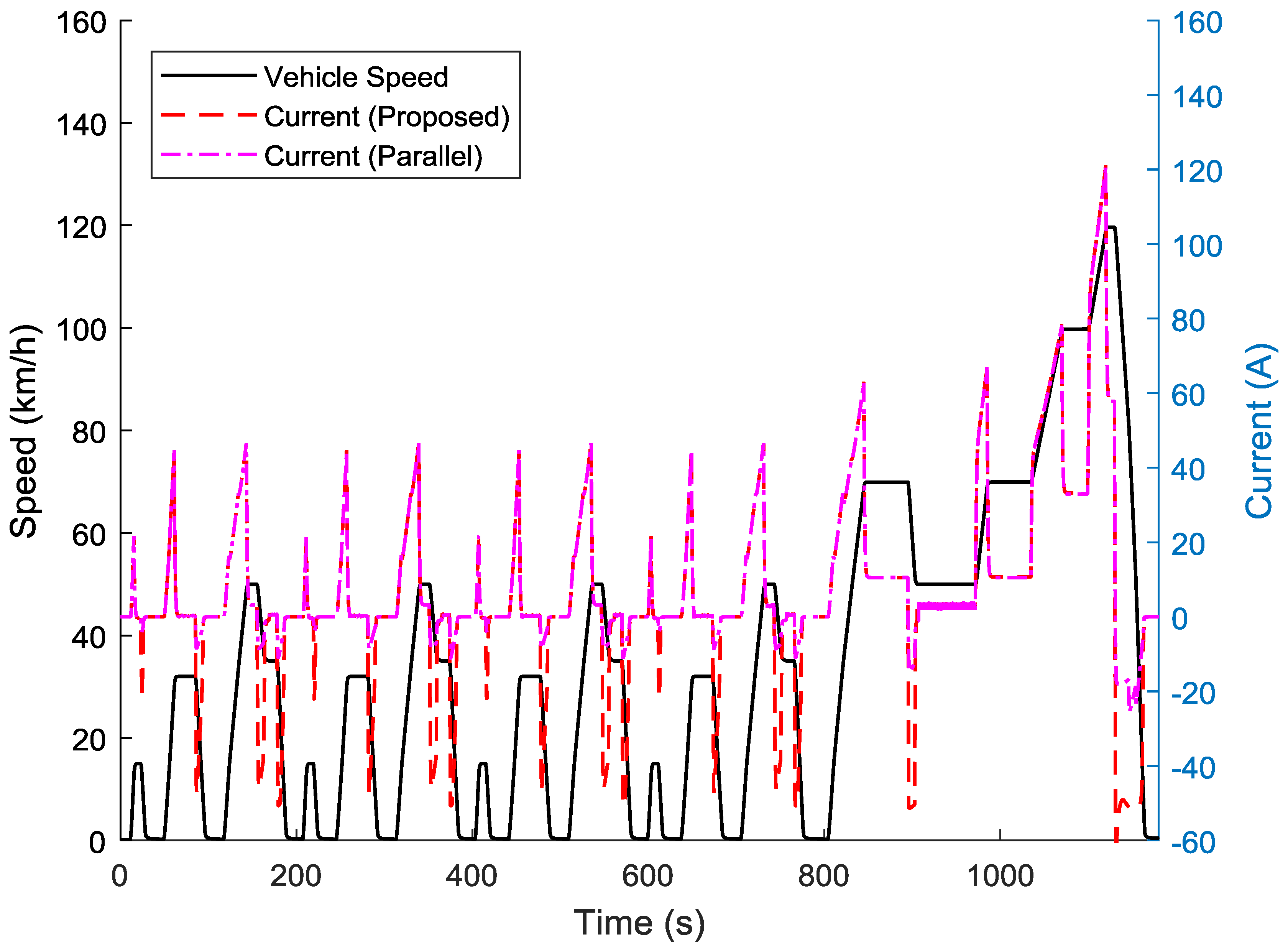
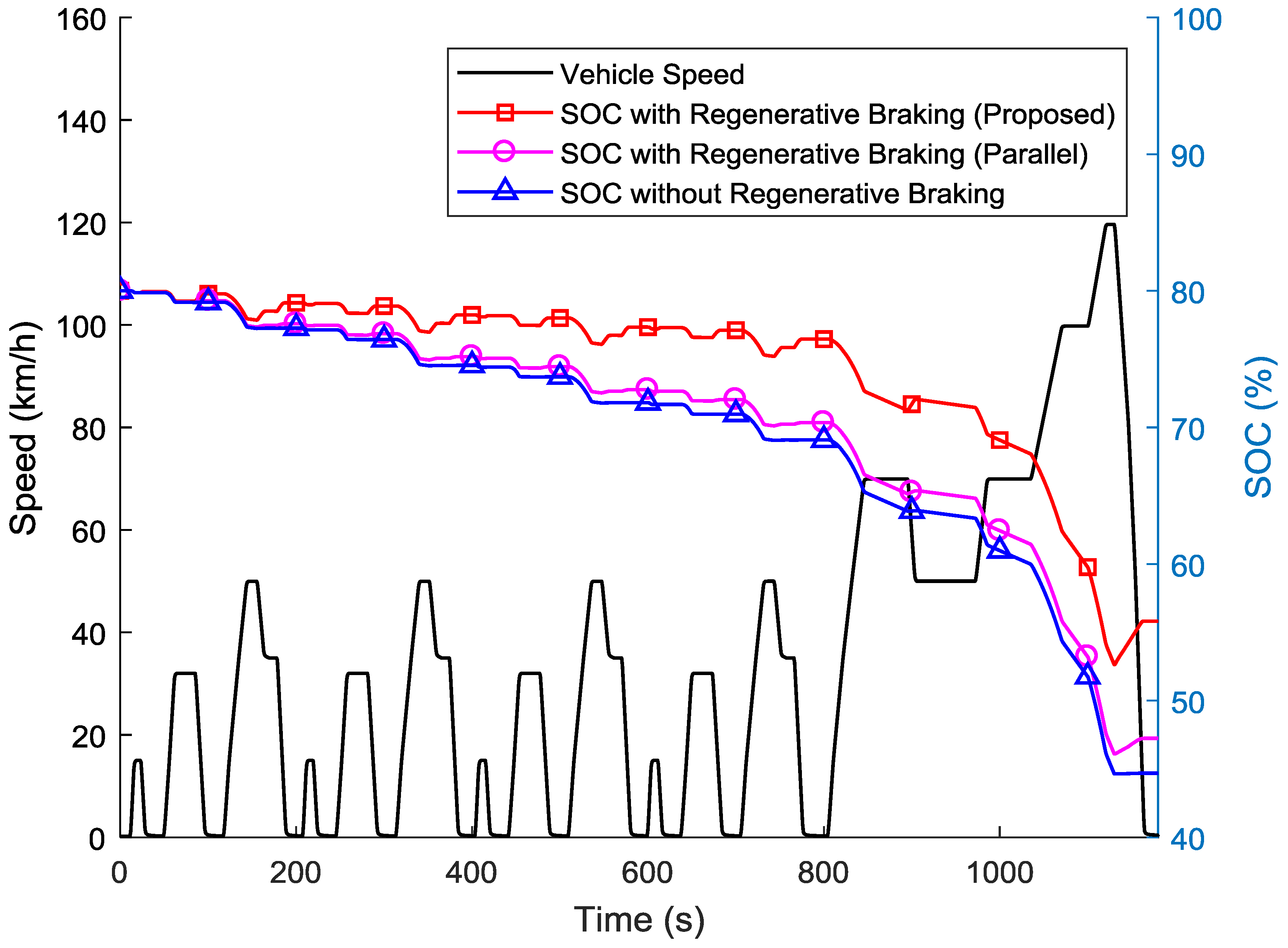
4.5. Energy Recovery Performance Evaluation of the System in Simulation Environment
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ma, H.; Balthasar, F.; Tait, N.; Riera-Palou, X.; Harrison, A. A new comparison between the life cycle greenhouse gas emissions of battery electric vehicles and internal combustion vehicles. Energy Policy 2012, 44, 160–173. [Google Scholar] [CrossRef]
- Conti, R.; Galardi, E.; Meli, E.; Nocciolini, D.; Pugi, L.; Rindi, A. Energy and wear optimisation of train longitudinal dynamics and of traction and braking systems. Veh. Syst. Dyn. 2015, 53, 651–671. [Google Scholar] [CrossRef]
- Pugi, L.; Malvezzi, M.; Papini, S.; Vettori, G. Design and preliminary validation of a tool for the simulation of train braking performance. J. Mod. Transp. 2013, 21, 247–257. [Google Scholar] [CrossRef]
- Ganzel, B.J. Hydraulic Brake System with Controlled Boost. U.S. Patent 8,544,962, 29 October 2008. [Google Scholar]
- Kim, S.M. Regenerative Brake Control Method. U.S. Patent 8,616,660, 11 May 2011. [Google Scholar]
- Akita, K.; Yamamoto, T.; Miyazaki, T.; Uraoka, T.; Watanabe, K. Brake Control System. U.S. Patent 9,238,454, 4 February 2011. [Google Scholar]
- Matsushita, S. Vehicle Braking Device. U.S. Patent 8,746,813, 6 May 2010. [Google Scholar]
- Yang, Y.; Zou, J.; Yang, Y.; Qin, D. Design and simulation of pressure coordinated control system for hybrid vehicle regenerative braking system. J. Dyn. Syst. Meas. Control 2014, 136, 051019. [Google Scholar] [CrossRef]
- Ko, J.; Ko, S.; Son, H.; Yoo, B.; Cheon, J.; Kim, H. Development of brake system and regenerative braking cooperative control algorithm for automatic-transmission-based hybrid electric vehicles. IEEE Trans. Veh. Technol. 2015, 64, 431–440. [Google Scholar] [CrossRef]
- Wang, B.; Huang, X.; Wang, J.; Guo, X.; Zhu, X. A robust wheel slip ratio control design combining hydraulic and regenerative braking systems for in-wheel-motors-driven electric vehicles. J. Frankl. Inst. 2015, 352, 577–602. [Google Scholar] [CrossRef]
- Zhang, J.; Lv, C.; Gou, J.; Kong, D. Cooperative control of regenerative braking and hydraulic braking of an electrified passenger car. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1289–1302. [Google Scholar] [CrossRef]
- Huang, X.; Wang, J. Model predictive regenerative braking control for lightweight electric vehicles with in-wheel motors. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1220–1232. [Google Scholar] [CrossRef]
- Guo, H.; He, H.; Xiao, X. A predictive distribution model for cooperative braking system of an electric vehicle. Math. Probl. Eng. 2014, 2014, 828269. [Google Scholar] [CrossRef]
- Nian, X.; Peng, F.; Zhang, H. Regenerative braking system of electric vehicle driven by brushless DC motor. IEEE Trans. Ind. Electron. 2014, 61, 5798–5808. [Google Scholar] [CrossRef]
- Pugi, L.; Grasso, F.; Pratesi, M.; Cipriani, M.; Bartolomei, A. Design and preliminary performance evaluation of a four wheeled vehicle with degraded adhesion conditions. Int. J. Electr. Hybrid Veh. 2017, 9, 1–32. [Google Scholar] [CrossRef]
- Zhang, J.; Lv, C.; Qiu, M.; Li, Y.; Sun, D. Braking energy regeneration control of a fuel cell hybrid electric bus. Energy Convers. Manag. 2013, 76, 1117–1124. [Google Scholar] [CrossRef]
- Kang, M.; Li, L.; Li, H.; Song, J.; Han, Z. Coordinated vehicle traction control based on engine torque and brake pressure under complicated road conditions. Veh. Syst. Dyn. 2012, 50, 1473–1494. [Google Scholar] [CrossRef]
- Zhao, X.; Li, L.; Song, J.; Li, C.; Gao, X. Linear Control of Switching Valve in Vehicle Hydraulic Control Unit Based on Sensorless Solenoid Position Estimation. IEEE Trans. Ind. Electron. 2016, 63, 4073–4085. [Google Scholar] [CrossRef]
- Lutsey, N.; Sperling, D. Energy efficiency, fuel economy, and policy implications. Transp. Res. Rec. J. Transp. Res. Board 2005, 1941, 8–17. [Google Scholar] [CrossRef]
- Pacejka, H. Tire and Vehicle Dynamics; Elsevier: Amsterdam, The Netherlands, 2005. [Google Scholar]
- Gu, J.; Ouyang, M.; Li, J.; Lu, D.; Fang, C.; Ma, Y. Driving and braking control of PM synchronous motor based on low-resolution hall sensor for battery electric vehicle. Chin. J. Mech. Eng. 2013, 26, 1–10. [Google Scholar] [CrossRef]
- Yang, I.; Lee, W.; Hwang, I. A Model-Based Design Analysis of Hydraulic Braking System; 0148-7191; SAE International: Warrendale, PA, USA, 2003. [Google Scholar] [CrossRef]
- Peng, D.; Zhang, Y.; Yin, C.-L.; Zhang, J.-W. Combined control of a regenerative braking and antilock braking system for hybrid electric vehicles. Int. J. Automot. Technol. 2008, 9, 749–757. [Google Scholar] [CrossRef]
- Ebert, D.G.; Kaatz, R.A. Objective Characterization of Vehicle Brake Feel; 0148-7191; SAE International: Warrendale, PA, USA, 1994. [Google Scholar] [CrossRef]
- Lv, C.; Zhang, J.; Li, Y.; Yuan, Y. Mechanism analysis and evaluation methodology of regenerative braking contribution to energy efficiency improvement of electrified vehicles. Energy Convers. Manag. 2015, 92, 469–482. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Total weight of the car | |
| Wheelbase | |
| Distance from front axle to centroid | |
| Distance from rear axle to centroid | |
| Centroid height | |
| Drag area | |
| Moment of inertia of a wheel | |
| Rolling radius of a wheel | |
| Transmission reduction ratio | |
| Battery capacity | |
| Initial SOC(state of charge) | |
| Brake factor | |
| Diameter of front wheel cylinder | |
| Diameter of rear wheel cylinder | |
| Diameter of master cylinder | |
| Effective radius of front brake rotor | |
| Effective radius of rear brake rotor | |
| Brake pedal leverage ratio | |
| Diameter of pedal travel simulator | |
| Stiffness of pedal travel simulator spring (1st stage) | |
| Stiffness of pedal travel simulator spring (2nd stage) |
| Strategy | Energy Efficiency (kWh/100 km) | Contribution to Energy Efficiency Improvement (%) |
|---|---|---|
| Hydraulic only | 12.5466 | - |
| Parallel | 11.6438 | 7.20 |
| Proposed | 8.5907 | 31.53 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, D.; Chu, L.; Xu, N.; Sun, C.; Xu, Y. Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles. Energies 2018, 11, 378. https://doi.org/10.3390/en11020378
Zhao D, Chu L, Xu N, Sun C, Xu Y. Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles. Energies. 2018; 11(2):378. https://doi.org/10.3390/en11020378
Chicago/Turabian StyleZhao, Di, Liang Chu, Nan Xu, Chengwei Sun, and Yanwu Xu. 2018. "Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles" Energies 11, no. 2: 378. https://doi.org/10.3390/en11020378
APA StyleZhao, D., Chu, L., Xu, N., Sun, C., & Xu, Y. (2018). Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles. Energies, 11(2), 378. https://doi.org/10.3390/en11020378