Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives

Abstract
:1. Introduction
2. Nonlinear Mathematical Model
Machine Model Description
3. Disturbances Analysis
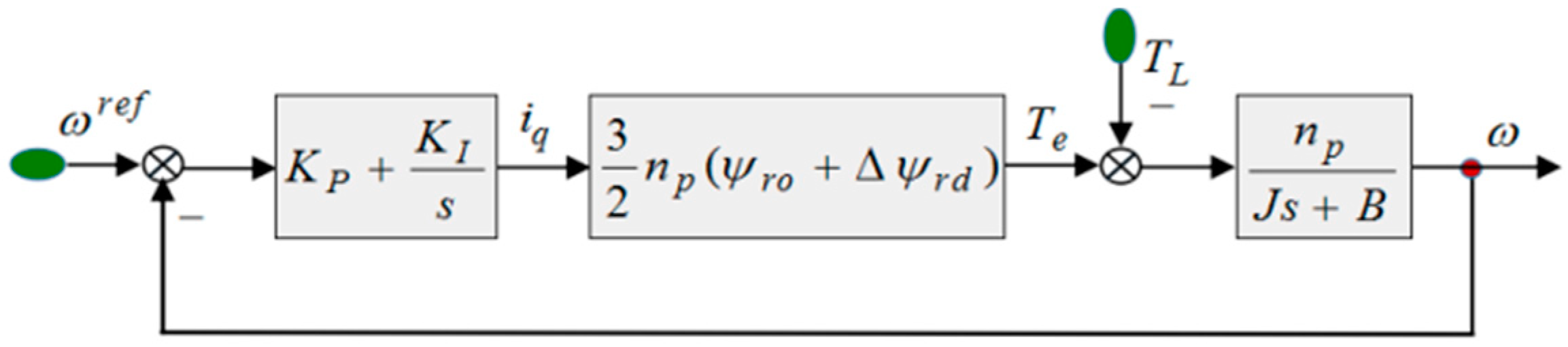
3.1. Effect of Disturbance on Speed Loop
3.2. Effect of Disturbance on Current Loop
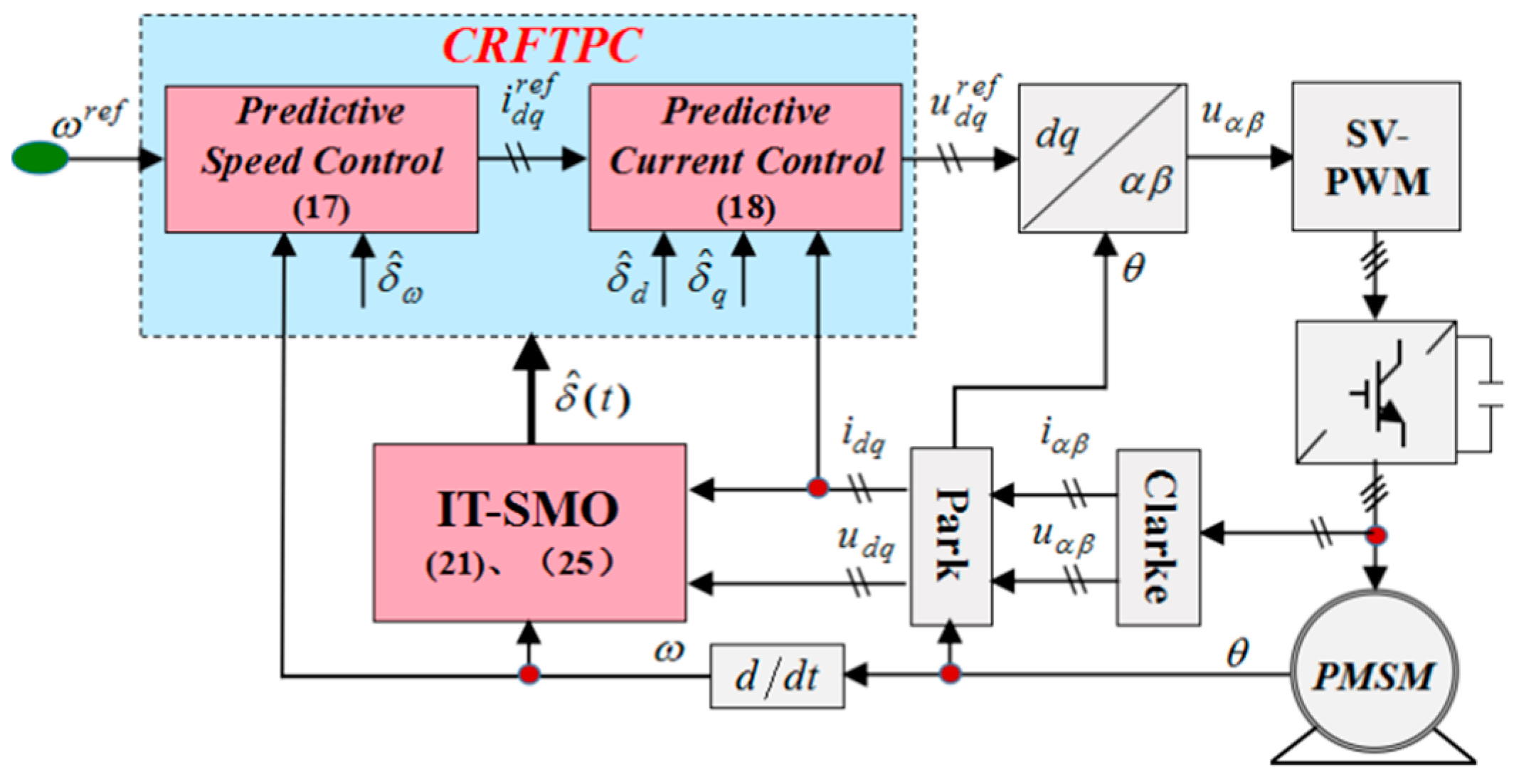
4. Design of the CRFTPC
4.1. Design of the Optimal Control Law
4.2. Stability Analysis
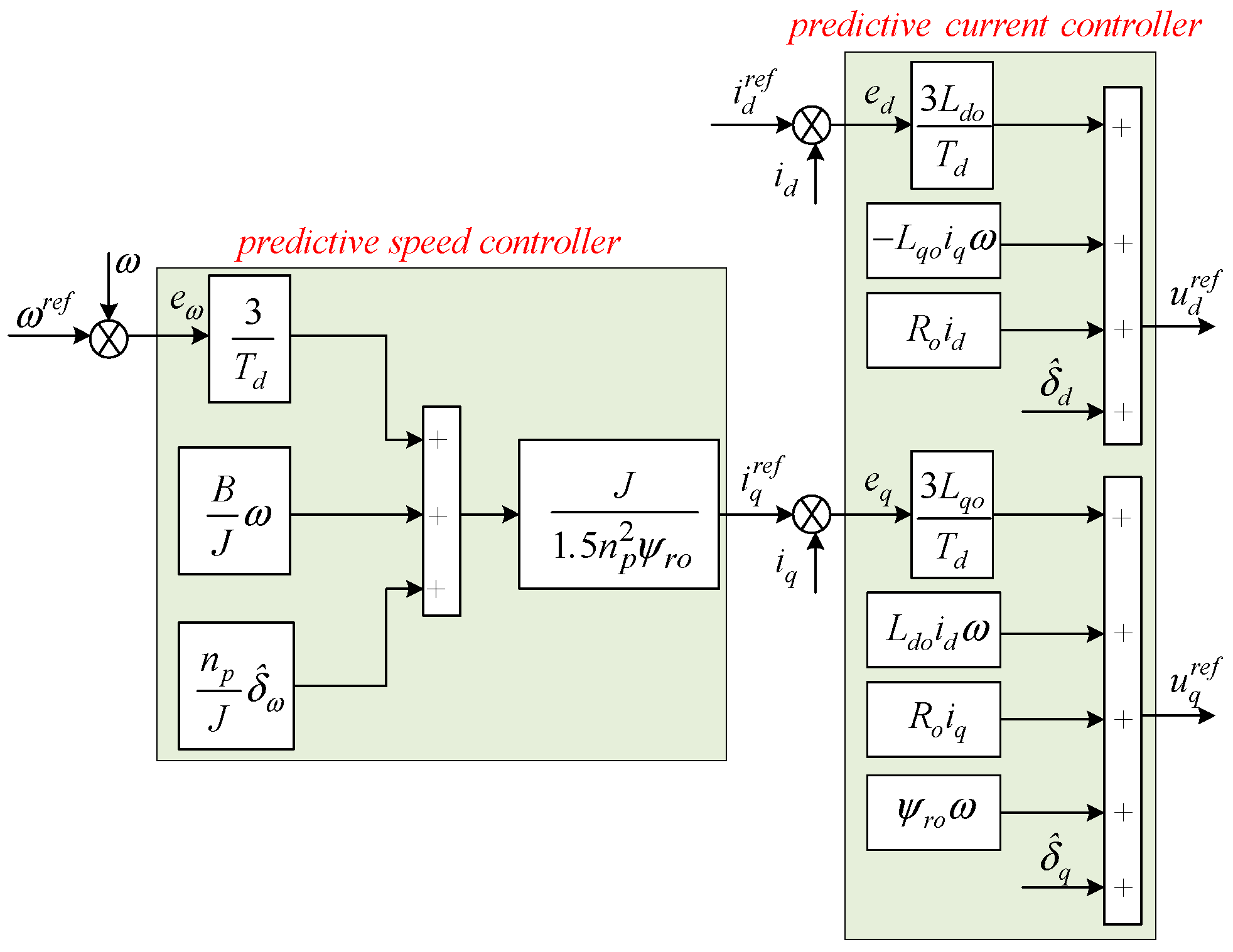
4.3. Design of Predictive Speed Controller
4.4. Design of Predictive Current Controller
4.5. Design of IT-SMO
5. Simulations
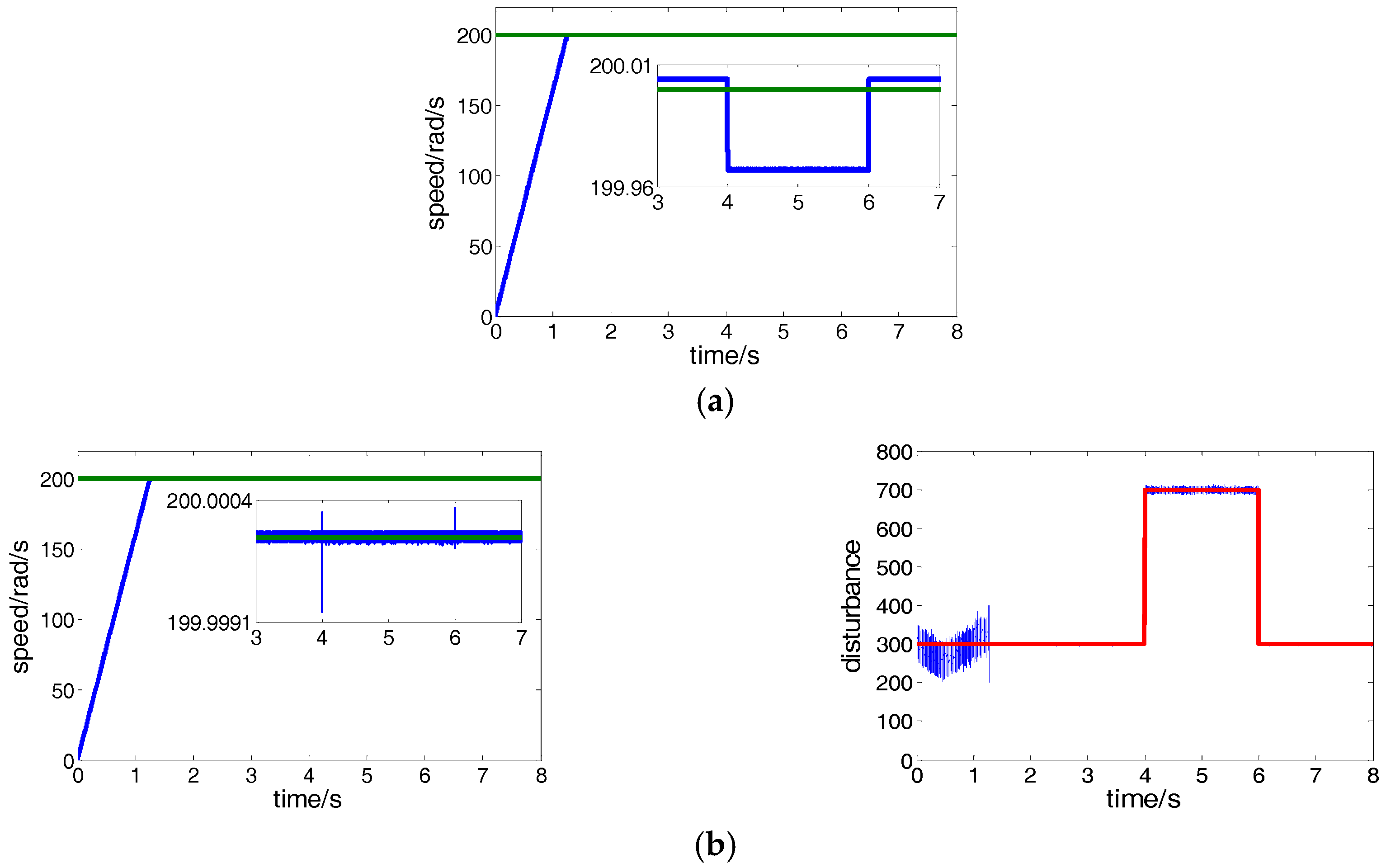
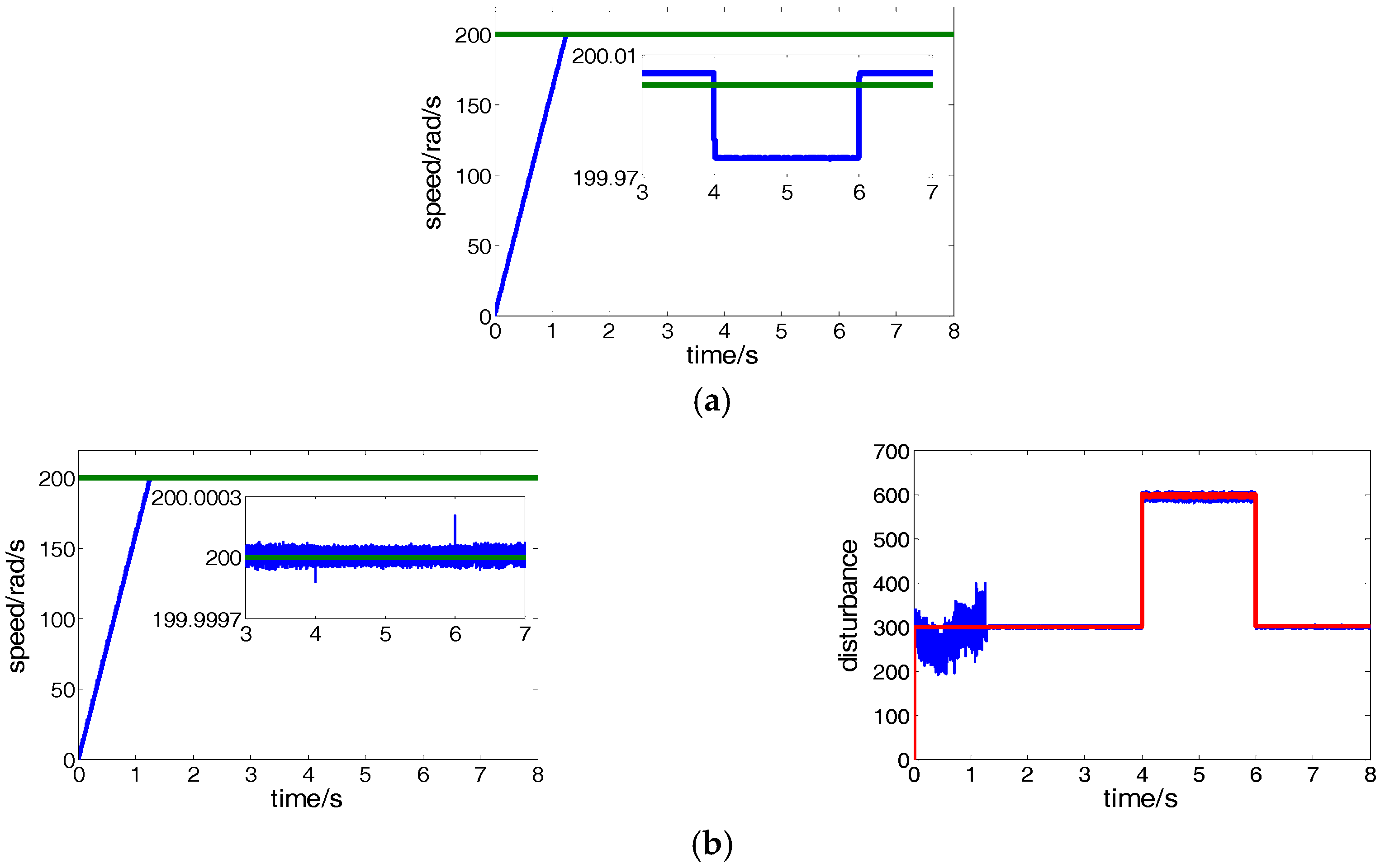
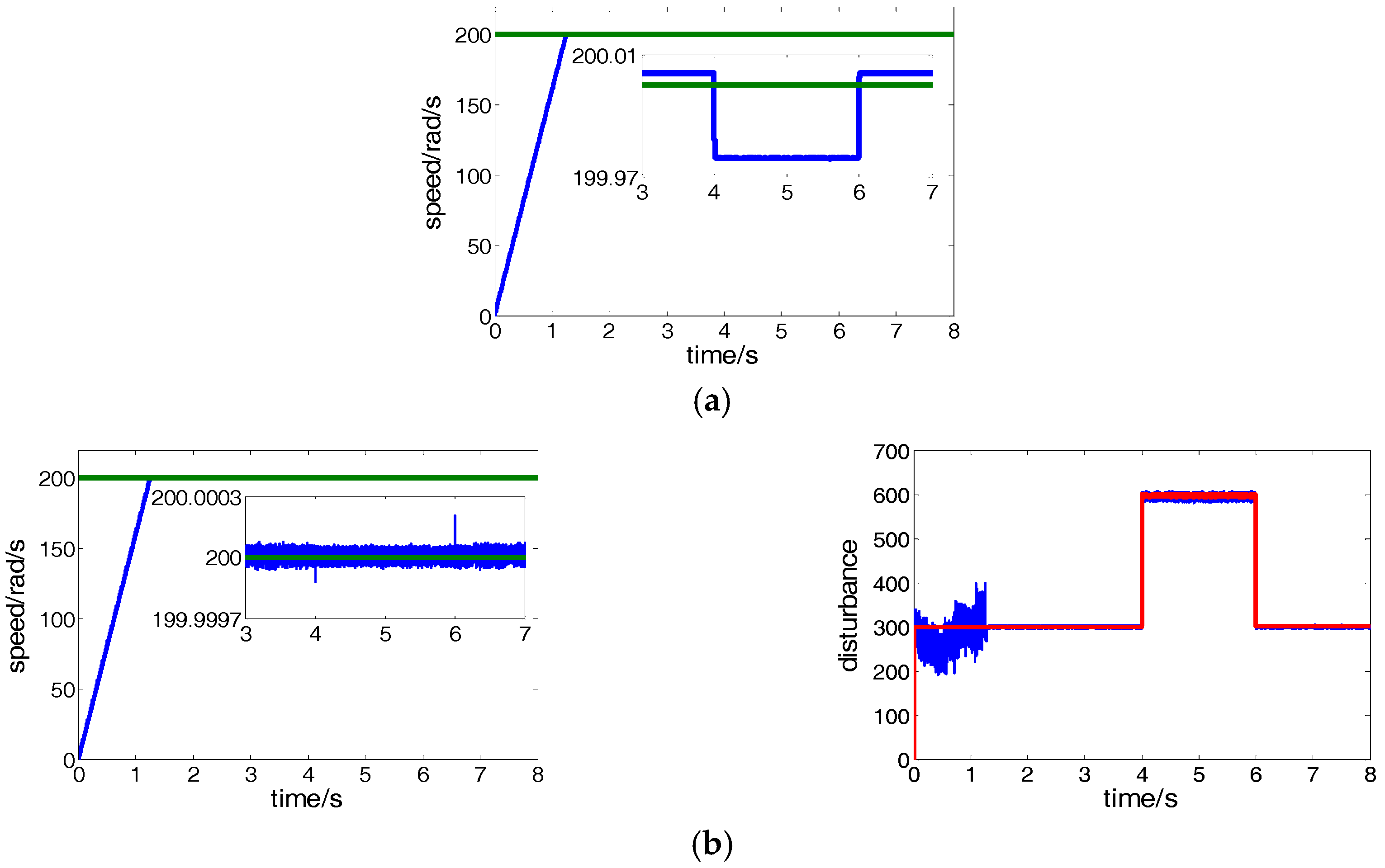
5.1. Speed Control Performance Comparison of Conventional PI and Proposed CRFTPC
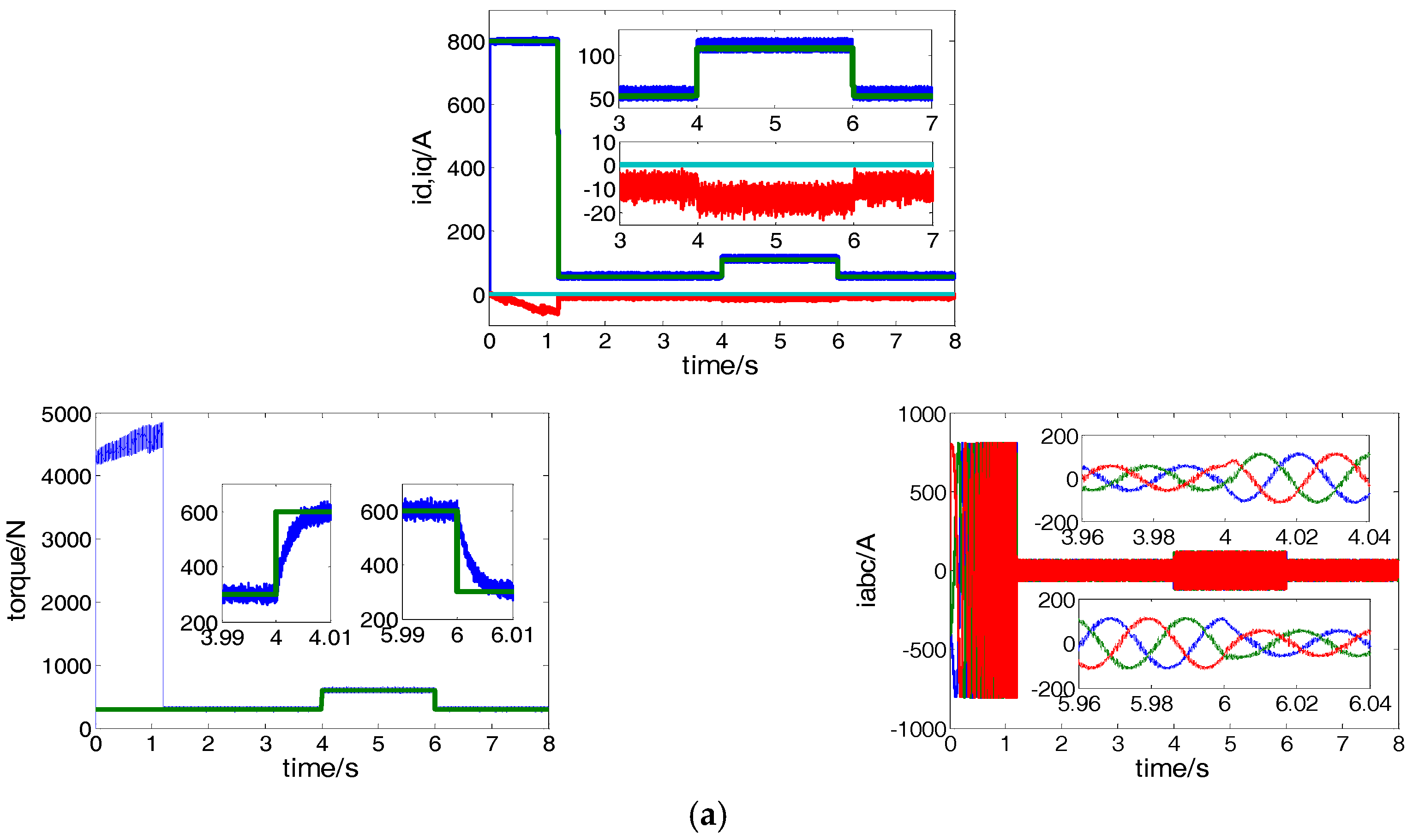
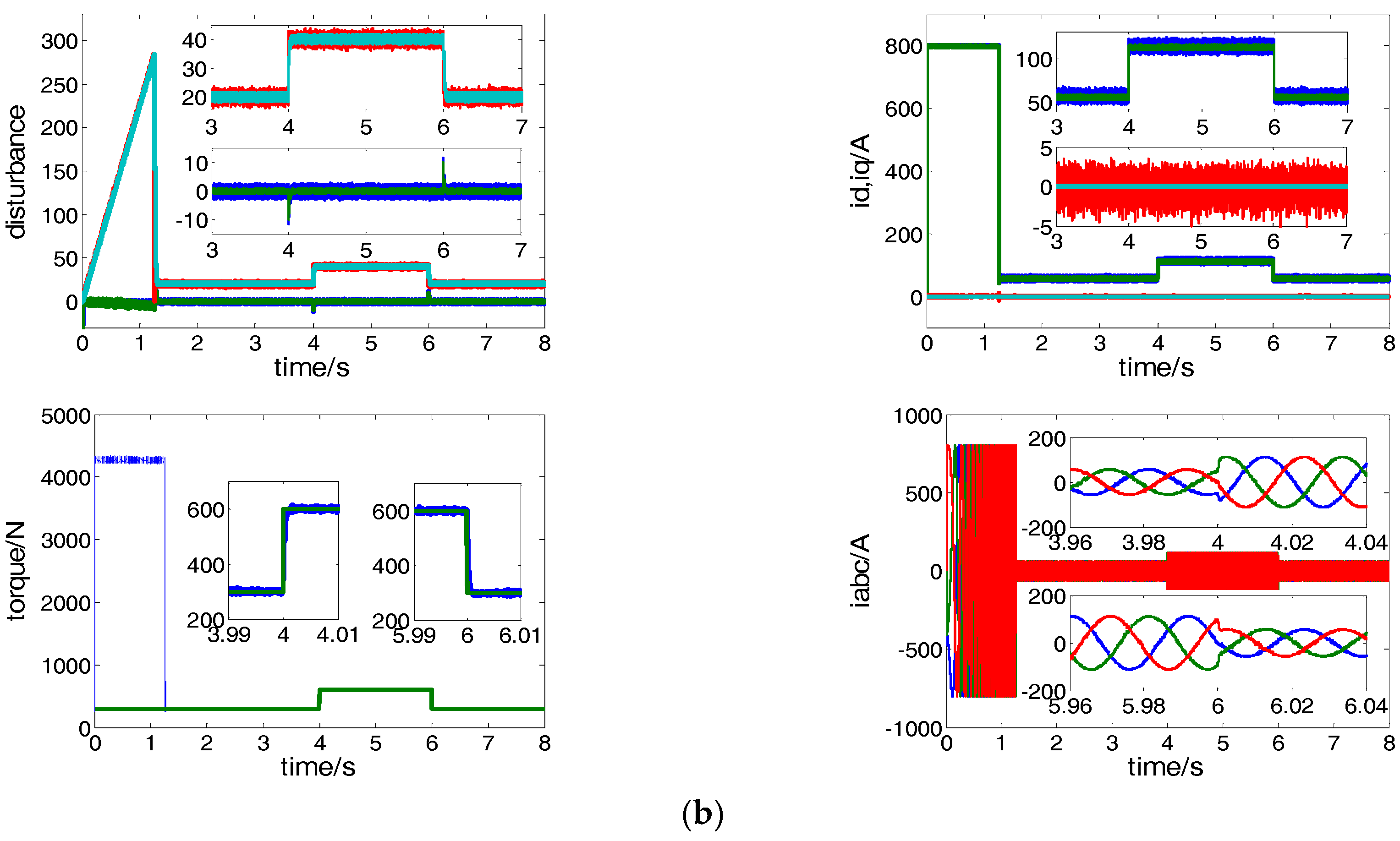
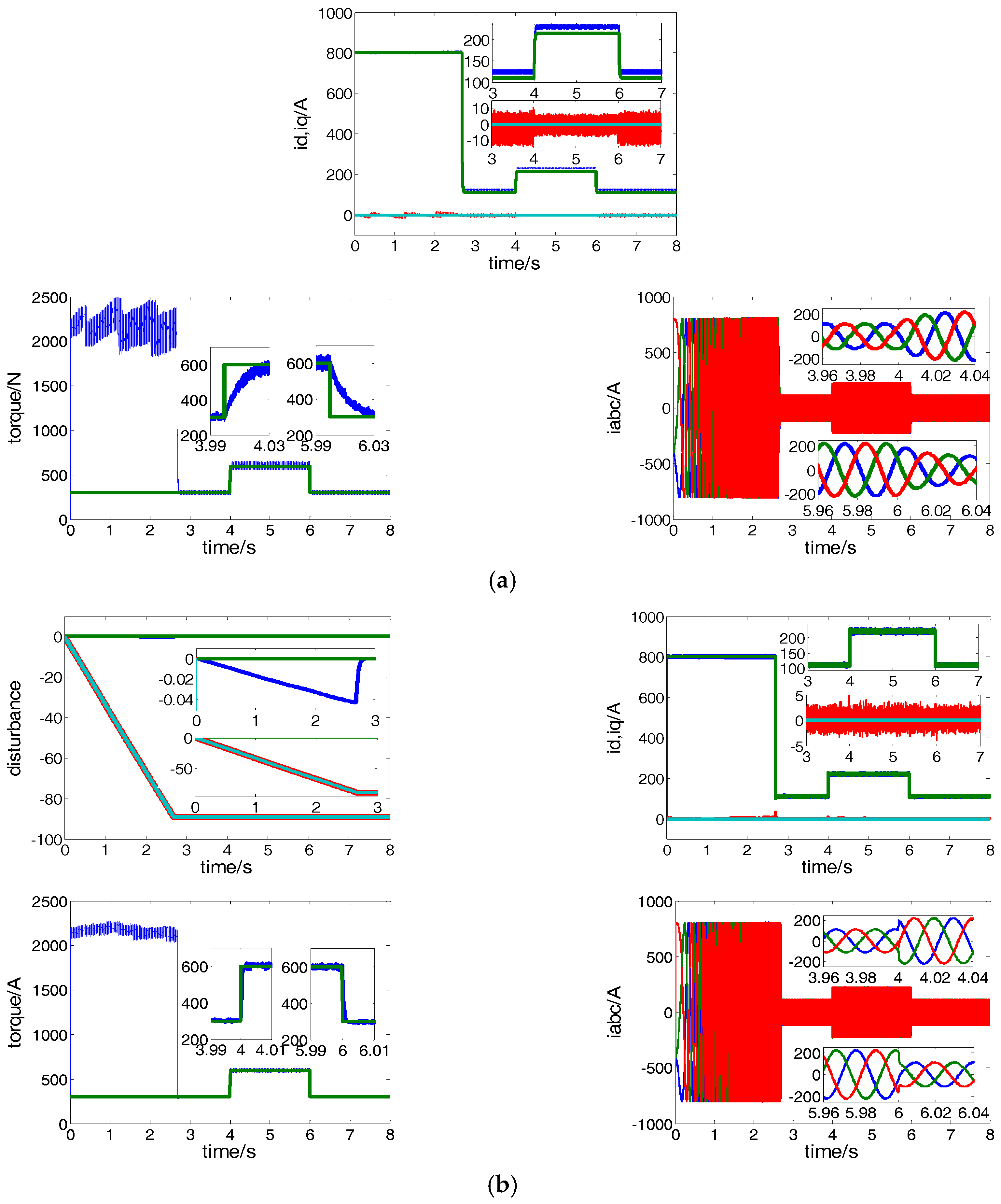
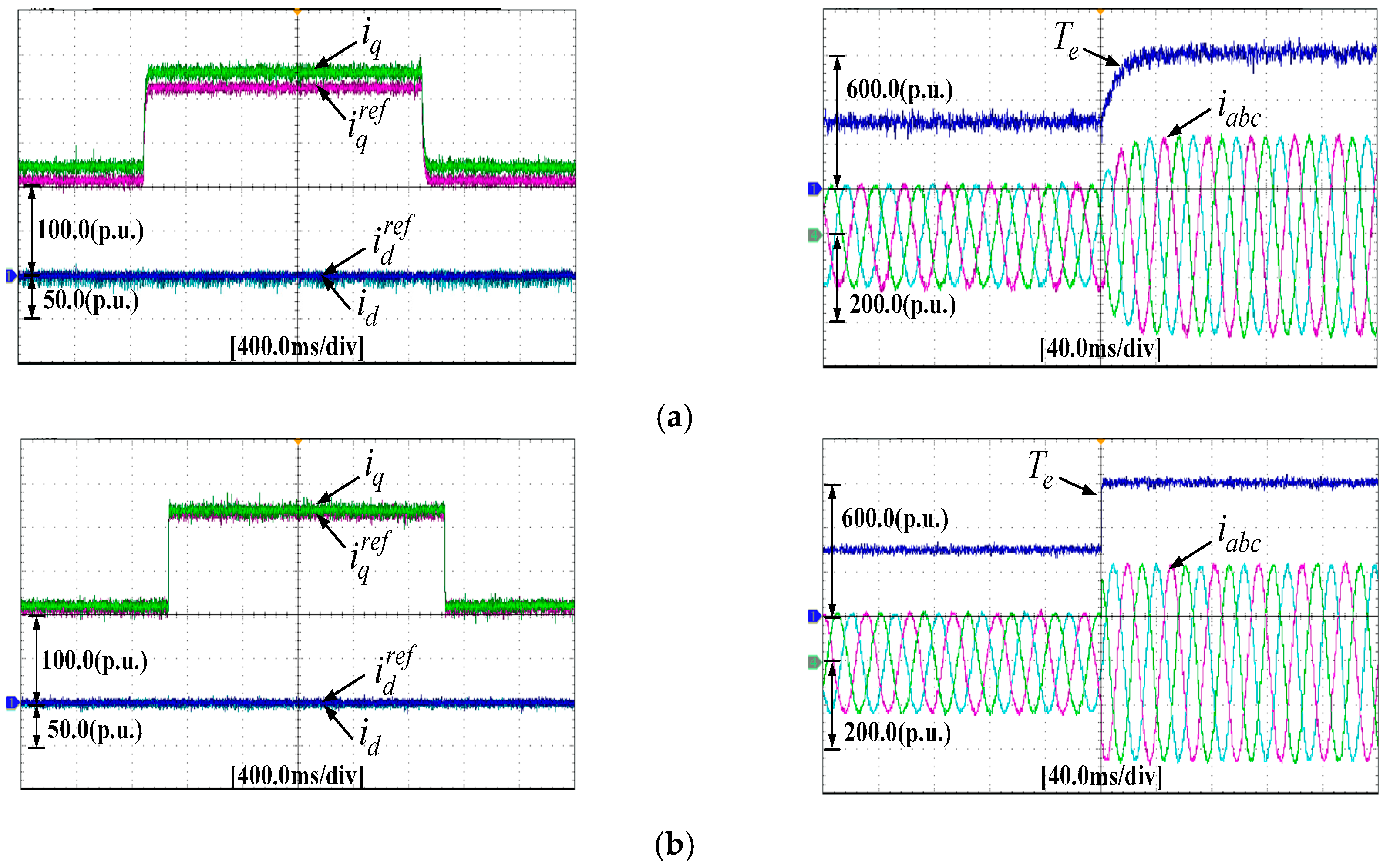
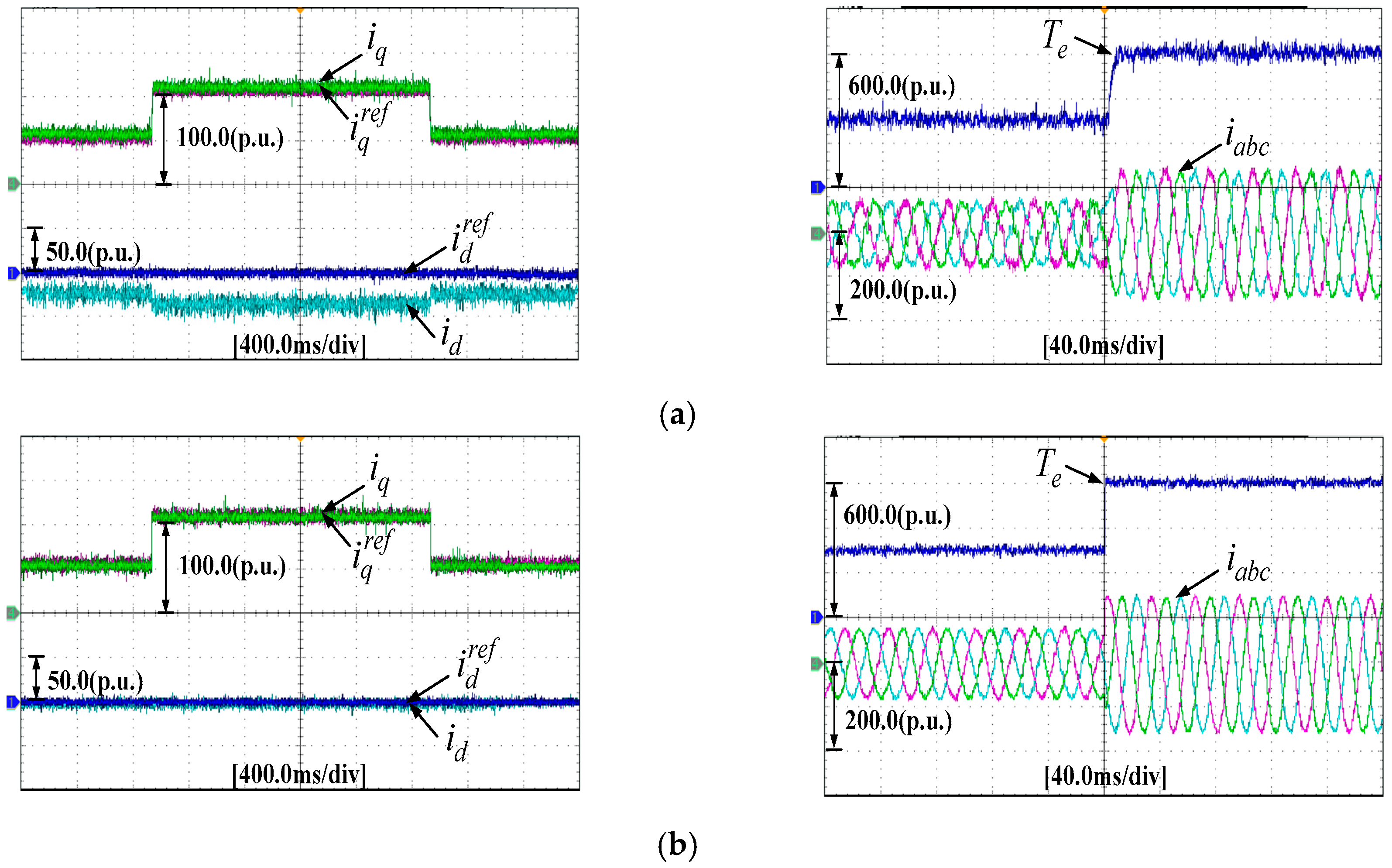
5.2. Current Control Performance Comparison of Conventional PCC and Proposed CRFTPC
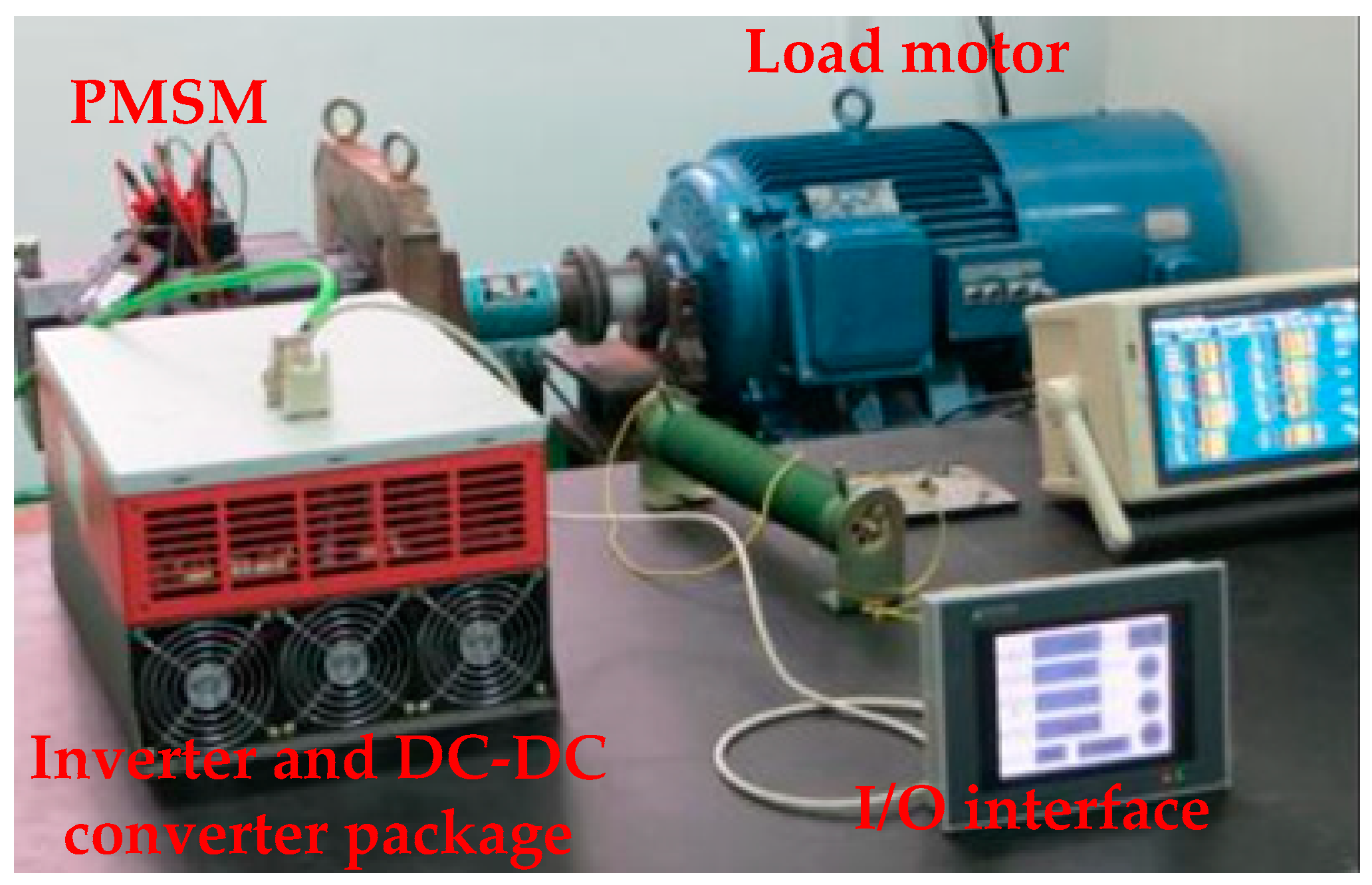
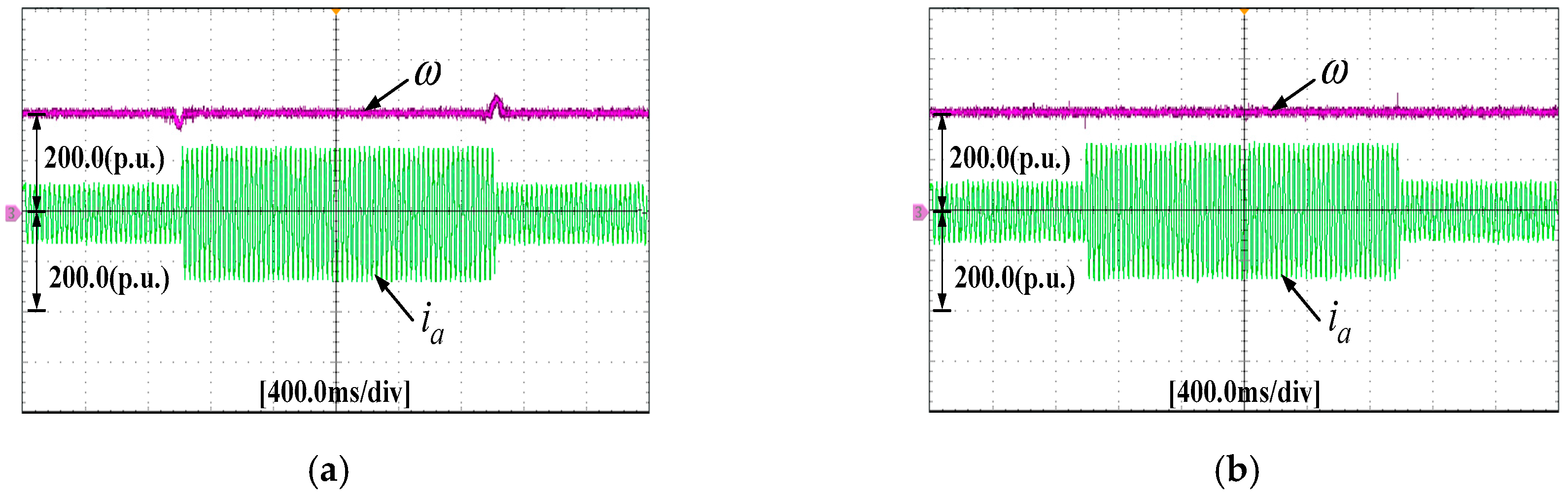
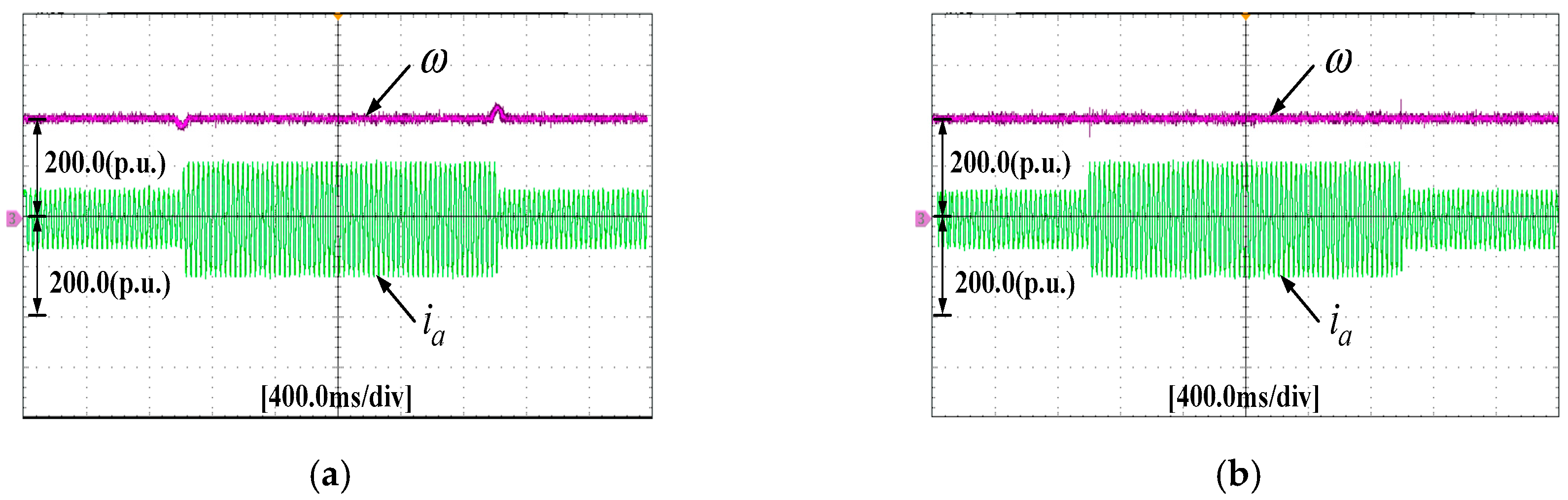
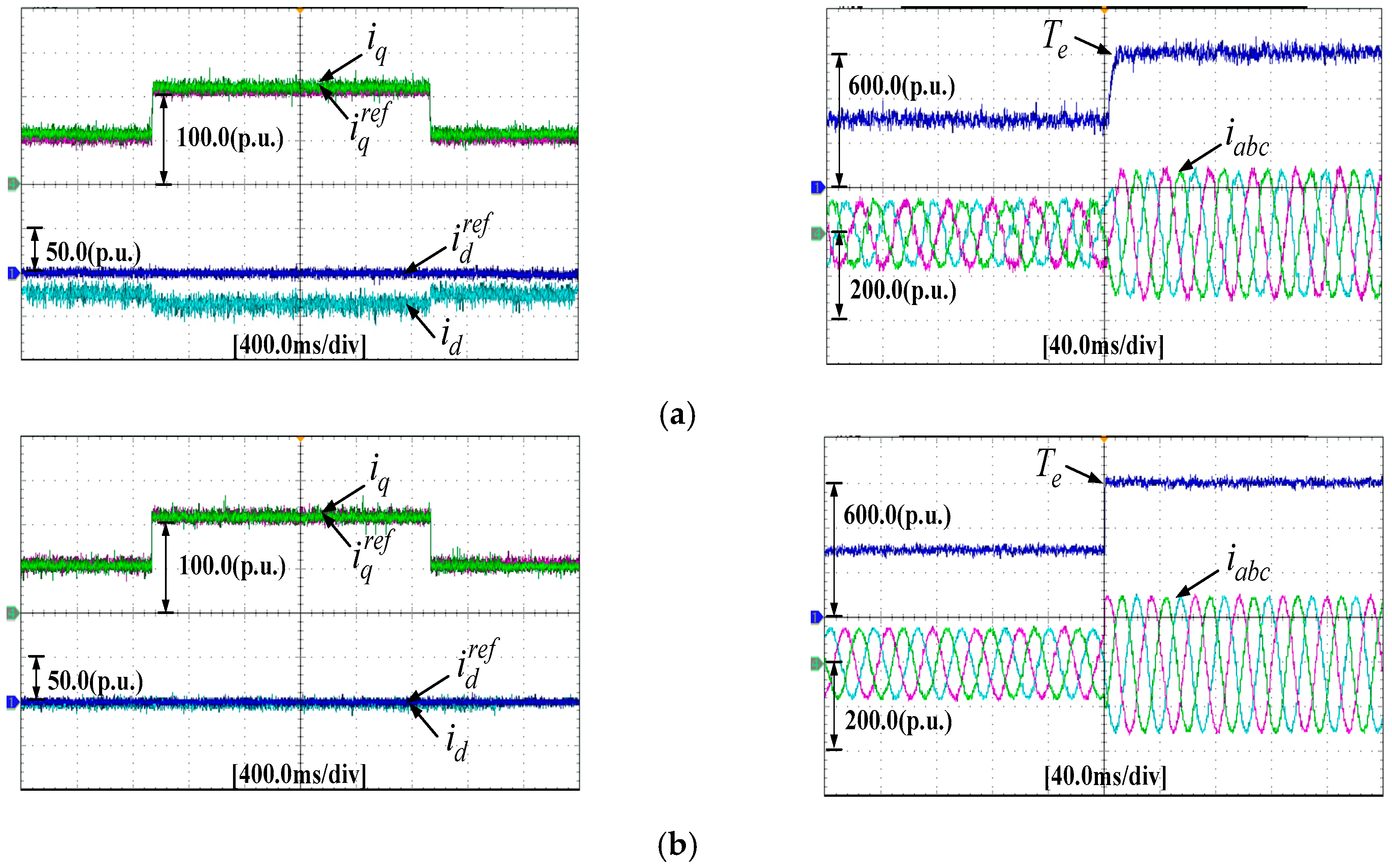
6. Experiments
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Consoli, A.; Scarcella, G.; Testa, A. Slip-frequency detection for indirect field-oriented control drives. IEEE Trans. Ind. Electron. 2004, 40, 194–201. [Google Scholar] [CrossRef]
- Qian, W.; Panda, S.K.; Xu, J.X. Torque ripple minimization in PM synchronous motors using iterative learning control. IEEE Trans. Power Electron. 2004, 19, 272–279. [Google Scholar] [CrossRef]
- Wang, B.; Chen, X.; Yu, Y.; Wang, G.; Xu, D. Robust predictive current control with online disturbance estimation for induction machine drives. IEEE Trans. Power Electron. 2017, 32, 4663–4674. [Google Scholar] [CrossRef]
- Stojic, D.M.; Milinkovic, M.; Veinovic, S.; Klasnic, I. Stationary frame induction motor feed forward current controller with back EMF compensation. IEEE Trans. Power Electron. 2015, 30, 1356–1366. [Google Scholar] [CrossRef]
- Guzman, H.; Duran, M.J.; Barrero, F.; Zarri, L.; Bogado, B.; Prieto, I.G.; Arahal, M.R. Comparative study of predictive and resonant controllers in fault-tolerant five-phase induction motor drives. IEEE Trans. Ind. Electron. 2016, 63, 606–617. [Google Scholar] [CrossRef]
- Belda, K.; Vošmik, D. Explicit generalized predictive control of speed and position of PMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 3889–3896. [Google Scholar] [CrossRef]
- Bazaz, M.A.; Nabi, M.; Janardhanan, S. Modelling and simulation strategy for parametric transient electromagnetic simulations. Int. J. Model. Identif. Control 2013, 18, 251–260. [Google Scholar] [CrossRef]
- Zhu, M.; Hu, W.; Kar, N.C. Torque-ripple-based interior permanent-magnet synchronous machine rotor demagnetization fault detection and current regulation. IEEE Trans. Ind. Appl. 2017, 53, 2795–2804. [Google Scholar] [CrossRef]
- Ahn, H.J.; Lee, D.M. A new bumpless rotor-flux position estimation scheme for vector-controlled washing machine. IEEE Trans. Ind. Inf. 2016, 12, 466–473. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z. Adaptive speed control for permanent-magnet synchronous motor system with variations of load inertia. IEEE Trans. Ind. Electron. 2009, 56, 3050–3059. [Google Scholar]
- Mercorelli, P.; Lehmann, K.; Liu, S. Robust flatness based control of an electromagnetic linear actuator using adaptive PID controller. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; pp. 3790–3795. [Google Scholar]
- Carpiuc, S.-C.; Lazar, C. Fast real-time constrained predictive current control in permanent magnet synchronous machine-based automotive traction drives. IEEE Trans. Transp. Electrif. 2015, 1, 326–335. [Google Scholar] [CrossRef]
- Cortes, P.; Rodriguez, J.; Silva, C.; Flores, A. Delay compensation in model predictive current control of a three-phase inverter. IEEE Trans. Ind. Electron. 2012, 59, 1323–1325. [Google Scholar] [CrossRef]
- Lim, C.S.; Levi, E.; Jones, M.; Rahim, N.A.; Hew, W.P. FCSMPC-based current control of a five-phase induction motor and its comparison with PI-PWM control. IEEE Trans. Ind. Electron. 2014, 61, 149–163. [Google Scholar] [CrossRef]
- Siami, M.; Khaburi, D.A.; Abbaszadeh, A.; Rodríguez, J. Robustness improvement of predictive current control using prediction error correction for permanent-magnet synchronous machines. IEEE Trans. Ind. Electron. 2016, 63, 3458–3466. [Google Scholar] [CrossRef]
- Yang, M.; Lang, X.; Long, J.; Xu, D. A flux immunity robust predictive current control with incremental model and extended state observer for PMSM drive. IEEE Trans. Power Electron. 2017. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, B.; Yang, M. Deadbeat predictive current control of permanent-magnet synchronous motors with stator current and disturbance observer. IEEE Trans. Power Electron. 2017, 32, 3818–3834. [Google Scholar] [CrossRef]
- Türker, T.; Buyukkeles, U.; Bakan, A.F. A robust predictive current controller for PMSM drives. IEEE Trans. Ind. Electron. 2016, 63, 3906–3914. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. A cascade MPC control structure for a PMSM with speed ripple minimization. IEEE Trans. Ind. Electron. 2013, 60, 2978–2987. [Google Scholar] [CrossRef]
- Sawma, J.; Khatounian, F.; Monmasson, E.; Idkhajine, L.; Ghosn, R. Cascaded dual-model-predictive control of an active front-end rectifier. IEEE Trans. Ind. Electron. 2016, 63, 4604–4614. [Google Scholar] [CrossRef]
- Fuentes, E.J.; Silva, C.A.; Yuz, J.I. predictive speed control of a two-mass system driven by a permanent magnet synchronous motor. IEEE Trans. Ind. Electron. 2012, 59, 2840–2848. [Google Scholar] [CrossRef]
- Fuentes, E.; Kalise, D.; Rodriguez, J.; Kennel, R.M. Cascade-free predictive speed control for electrical drives. IEEE Trans. Ind. Electron. 2014, 61, 2176–2184. [Google Scholar] [CrossRef]
- Garcia, C.; Rodriguez, J.; Silva, C.; Rojas, C.; Zanchetta, P.; Abu-Rub, H. Full predictive cascaded speed and current control of an induction machine. IEEE Trans. Energy Convers. 2016, 31, 1059–1067. [Google Scholar] [CrossRef]
- Alexandrou, A.D.; Adamopoulos, N.K.; Kladas, A.G. Development of a constant switching frequency deadbeat predictive control technique for field-oriented synchronous permanent-magnet motor drive. IEEE Trans. Ind. Electron. 2016, 63, 5167–5175. [Google Scholar] [CrossRef]
- Richter, J.; Doppelbauer, M. Predictive trajectory control of permanent-magnet synchronous machines with nonlinear magnetics. IEEE Trans. Ind. Electron. 2016, 63, 3915–3924. [Google Scholar] [CrossRef]
- Rahman, M.A.; Zhou, P. Analysis of brushless permanent magnet synchronous motors. IEEE Trans. Ind. Electron. 1996, 43, 256–267. [Google Scholar] [CrossRef]
- Mercorelli, P. Parameters identification in a permanent magnet three-phase synchronous motor of a city-bus for an intelligent drive assistant. Int. J. Model. Identif. Control 2014, 21, 352–361. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Stator phase resistance (Ro) | 0.02 Ω |
| Number of pole pairs (np) | 4 |
| d-axis inductances (Ldo) | 0.001 H |
| q-axis inductances (Lqo) | 0.003572 H |
| Flux linkage of permanent magnets (Ψro) | 0.892 Wb |
| Rotational inertia (J) | 100 kg·m2 |
| viscous friction coef (B) | 0.01 kg m2 s−1 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, F.; Luo, D.; Luo, C.; Long, Z.; Wu, G. Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives. Energies 2018, 11, 3087. https://doi.org/10.3390/en11113087
Hu F, Luo D, Luo C, Long Z, Wu G. Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives. Energies. 2018; 11(11):3087. https://doi.org/10.3390/en11113087
Chicago/Turabian StyleHu, Fang, Derong Luo, Chengwei Luo, Zhuo Long, and Gongping Wu. 2018. "Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives" Energies 11, no. 11: 3087. https://doi.org/10.3390/en11113087
APA StyleHu, F., Luo, D., Luo, C., Long, Z., & Wu, G. (2018). Cascaded Robust Fault-Tolerant Predictive Control for PMSM Drives. Energies, 11(11), 3087. https://doi.org/10.3390/en11113087